A Method for Modeling of Pedestrian Flow in the Obstacle Space
using Laser Range Scanners
Yoshitaka NAKAMURA†, Yusuke WADA‡,
Teruo HIGASHINO‡ & Osamu TAKAHASHI†
†Future University Hakodate, JAPAN‡Osaka University, JAPAN

Background
• Development of sensing technologies– Various phenomena become able to be measured as digital data– Some services based on this measuring data can be provided
• Pedestrian flow attracts attention– Movement of the pedestrians
• For orientation of the services based on mobility pattern of pedestrians
• For urban planning• For control of pedestrian for refuge instructions
2011/9/19 2IWIN2011

Purpose of Research
• To generate pedestrian flow model with high accuracy and law cost– Cost of measuring sensor• Price of sensor is as low as possible• Number of sensor is as little as possible
– Cost of data processing• Information to use is as little as possible
2011/9/19 3IWIN2011

Related Work
• Pedestrian flow detection– Cameras
• By recognizing the images of pedestrians • Disadvantage: Privacy, Setting cost, Angle of view
– RFID tag• By tracking with RFID of each pedestrian• Disadvantage: Cost of RFIDs
– Counting number of pedestrians• By counting the passage number of pedestrians in each
gateway• Disadvantage: Affected by occlusions
2011/9/19 4IWIN2011

Laser Range Scanners(LRS)
• Measures the distance to an object from LRS
• Advantage– Fast scanning of wide area– Little probability to infringe pedestrian’s privacy– Small cost of calculation– (Simple tracking by the difference of data is possible)
• Disadvantage– Easy to lose target objects by obstacles– Difficult to measure all pedestrians completely
2011/9/19 IWIN2011 5

Measuring Data of LRS
• Measurement time• Position coordinate of pedestrian• ID of pedestrian assigned by simple tracking of
UTM-30LX Simple tracking of UTM-30LX
Judge the same pedstrian from the difference of measured data and assign ID to the pedestrian
If tracking is succeed, pedestrian’s movement history can be found by ID
ID becomes extinct in the place where tracking of the pedestrian failedEven if the same pedestrian is found again, the other ID is assigned
2011/9/19 IWIN2011 6

Precedent Experiment(1/2)
• Conducted in “Whity Umeda”– By synchronizing 4 LRSs(HOKUYO UTM-30LX)–Measure the height of pedestrians’ waist[17]
2011/9/19 IWIN2011 7
[17] Kawata, Ohya, Yuta, Santosh and Mori, “Development of ultra smalllightweight optical range sensor system,” in Proc. of IROS2005

Precedent Experiment(2/2)
• Beige area is the movable area of pedestrians
• Orange columns are LRSs
• Pink lines are the measuring laser of LRSs
2011/9/19 IWIN2011 8
26m
33m

Performance of Tracking
• Simple tracking of UTM-30LX could continue only for a short time– 30%~40% of IDs’ life times are only 1 second• Pedestrians are hidden behind obstacles such as pillars• Pedestrians are also hidden behind other pedestrians• Some pedestrians are staying near LRS and become large
obstacles
2011/9/19 IWIN2011 9
=>The other approaches are needed for pedestrian flow generation

Approach
• Pedestrian flow is often used in– Trajectory analysis of customers in commercial facilities– Pedestrian flow analysis for refuge instruction, etc.
• In such case, tendencies of the pedestrians’ movement are more important than actual behaviors of pedestrians– Accurate tracking is impossible
2011/9/19 IWIN2011 10
Pay attention to the change of population density in the partial domain of the measurement area

Proposed Method
• Generate the pedestrian flow model from the population density– Divide measurement area into some square
domains(cells)– Calculate population density of each domain– Generate flow model based on the change and
distribution of population density
2011/9/19 IWIN2011 11

Assumptions
1. Pedestrians move to the only adjacent cell (in all directions) from the cell where himself/herself is now
2. Pedestrians move from the entrance to the exit without making a detour under Assumption 1
3. Pedestrian is measured only once in each cell where he/she passes
2011/9/19 IWIN2011 12

Overview of Method
1. Dived the measurement area into some unit cells
2. Select the gateway cells
3. Suppose the route candidate between each 2 gateways
4. Calculate the population density of each cell
5. Calculate the number of sojourners
6. Estimate the route where the pedestrian passed and its traffic
7. Determinate the direction of the flow
2011/9/19 IWIN2011 13

Supposition of the Route Candidate
• Suppose the route candidate according to Assumptions 1 & 2 between each two different gateway cells.
2011/9/19 IWIN2011 14

Calculation of the Population Density
• Count it up how many pedestrians existed in each cell for constant period of time => Population Density
• Exclude pedestrians moving at a speed less than minimum speed as sojourners– Minimum speed = 20cm/s
2011/9/19 IWIN2011 15
Sojourners3
0
4
4
5
1
4 5
5
1

Estimation of the Route
One route corresponds to one pedestrian
• Decide a route candidate passing a cell with high density as a route
• Update the density data to the data removed a decided route
• Repeat the process until the population of all cells become almost 0
2011/9/19 IWIN2011 16
0
4
4
5
1
1 5
5
3
3
4
4
4
0
0
0
0
0
0
0

Determination of Direction
• Detect the speed and direction of pedestrians’ movement from tracking data of UTM-30LXs
• Count the direction ratio of pedestrians’ movement in each cell on route candidates
• Determine the direction ratio of route based on direction ratio of pedestrian’s movement
2011/9/19 IWIN2011 17

Example of Generated Flow(1/2)
• Direction of arrow: Direction of the pedestrian flow
• Thickness of arrow: Quantity of the pedestrian flow
• Numbers in Circles: Average number of sojourners of same cell for each 1 minute
2011/9/19 IWIN2011 18
4
1
3
sojourners
sojourner
sojourners
Moring

Example of Generated Flow(2/2)
• Direction of arrow: Direction of the pedestrian flow
• Thickness of arrow: Quantity of the pedestrian flow
• Numbers in Circles: Average number of sojourners of same cell for each 1 minute
2011/9/19 IWIN2011 19
Evening
2sojourners
2sojourners
3sojourners
6sojourners

Performance Evaluation
• Evaluate the generated model using scenario data formed by MobiREAL based on the number of pedestrians in the gateway cells– Compare the pedestrian flow model generated by
proposed method with the pedestrian’s movement of scenario data
2011/9/19 IWIN2011 20

Scenario Data
• Set the origin and destination point of each node
• Generate a realistic movement model using MobiREAL
2011/9/19 IWIN2011 21

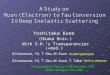
Agreement Rate
• Compare the flow model generated from the scenario data by proposed method with the scenario data
2011/9/19 IWIN2011 22
• Agreement rate: Ratio of the cell which the route of generation model passed is the same as scenario data
• Average agreement rate of route in the whole scenario is about 80.79%
Agreement rate: 67%
Scenario data Flow model

Discussion
• Accuracy of the measuring population density– This method takes the average value of several minutes
• the tendency of the pedestrian flow does not change in a short time• the disappearance of the pedestrian by the obstacle is keeping for
an instant
– Actually, the disappearing pedestrians exist for a long time depending on the placement of the obstacles(pedestrians)
• It is necessary to consider about method to estimate density by disappearance probability or different method to calculate the density by flow quantity
2011/9/19 IWIN2011 23

Conclusion
• Proposed a method for modeling pedestrian flow in the space such as underground shopping center– Using Laser Range Scanners– Using the change of population density
• Future work– Different calculation method of density corresponding to
the real environment– Comparison with the data which completely measured the
movement trace of each pedestrian
2011/9/19 24IWIN2011
Recommended