
A Distributed
Indoor Navigation SystemLeaving the Trails
Thomas Wießflecker
TerenaNetworking Conference 2009

Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
Everyday life in buildings Complex real estates Need for effective disaster management
Current situation in cities
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
Why do we need indoor positioning?
• Difficult overview and access
in case of hazard• Difficult to protect against terror• Favourite target
• Complicated navigation
in buildings
Increase building security
Save time and costs
Increase consumer satisfaction
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
Overview
• Introduction• Existing indoor positioning systems• A new approach:
Computer Aided Disaster Management System (CADMS)
• Building Information Model (BIM)• Indoor map matching• Evaluation• Conclusions
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
Why do we need to leave the trail?Existing positioning solutions
1. GPS cannot be deployed inside buildings
2. Systems based on RFID, WiFi, UWB depend on stationary infrastructure hardly adaptive, cost-intensive not suitable during an incident
3. Current map matching techniques cannot be deployed inside buildings
Development of a totally new approach at Graz, University of Technology
Main benefit of the CADMS: Autonomous indoor positioning
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
Approach to functioning indoor pos.
Development of a Computer Aided Disaster Management System (CADMS)
– Collecting acceleration data with Inertial Measurement Units– Sophisticated graphical user interface– Transmission of information to remote service customers
– Integration of imprecise sensor data and static data describing the real estate
• Development of a consistent Building Information Model (BIM)
• Embedding of dynamic sensor data into BIM data
Increase in positioning accuracy
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
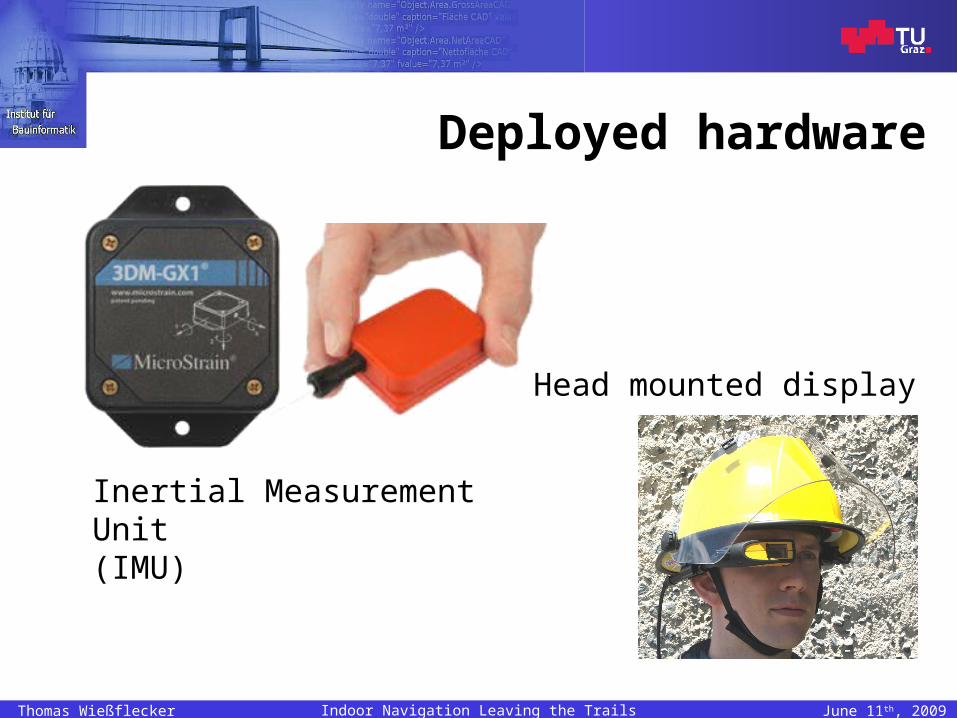
Deployed hardware
Inertial Measurement Unit(IMU)
Head mounted display
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
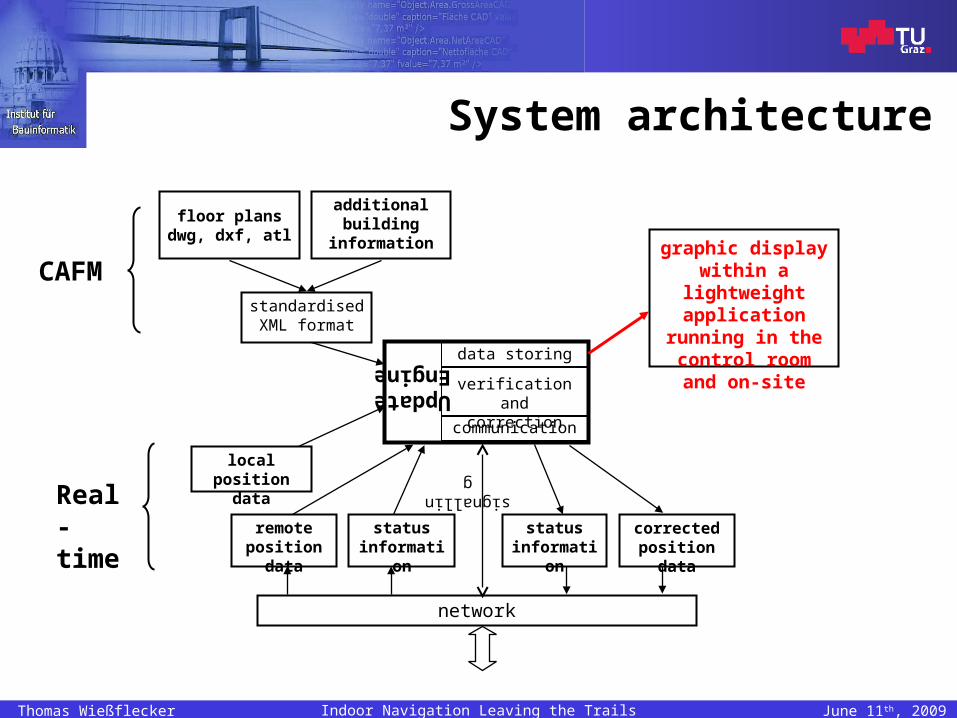
System architecture
UpdateEngine data storing
local position data
remote position data
status information
network
floor plansdwg, dxf, atl
standardised XML format
signalling
status information
correctedposition data
additional building
information
CAFM
Real-time
verification andcorrection
communication
graphic displaywithin a lightweight application running in the control room
and on-site
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
The BIM’s requirements
• Represent up-to-date information about the real estate(digital floor plans, room information, room polygons, area information, doors, stairs, reference points, columns, shells, dangerous goods etc.)
• Allow for presenting this information in acontext-adaptive way include capabilities for indoor positioning
Context-adaptive BIM that also integrates sensor data and structural information, adaptable to events occurring during the deployment
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
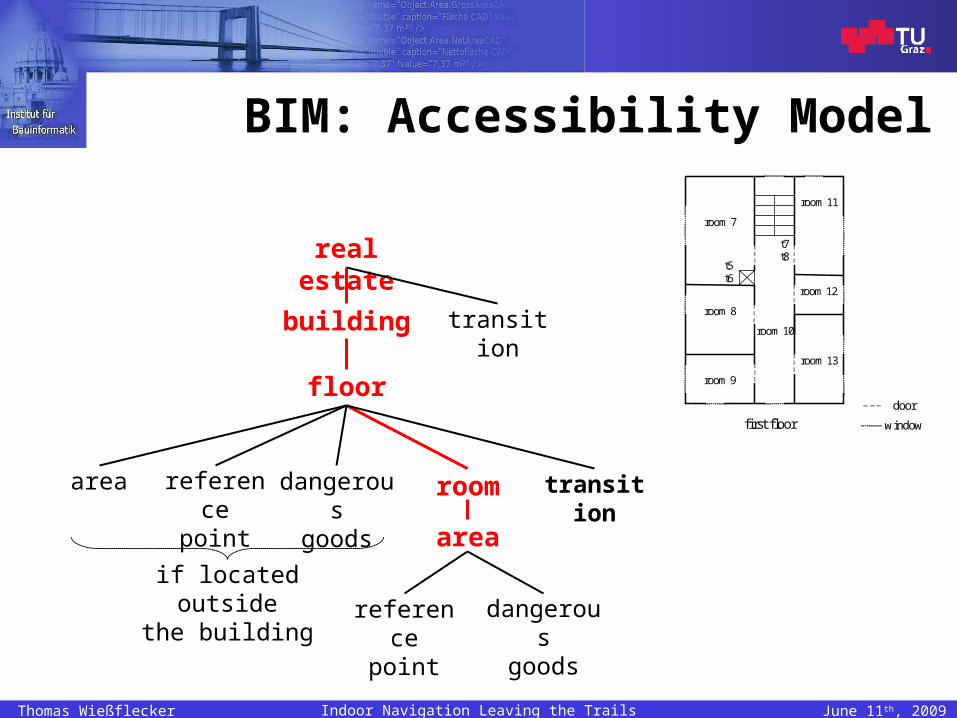
BIM: Accessibility Model
real estate
building
floor
room
transition
area referencepoint
dangerousgoods
if located outsidethe building
area
transition
referencepoint
dangerousgoods
first floor
door
window
room 7
room 8
room 9
room 10
room 11
room 12
room 13
t5 t6
t7 t8
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
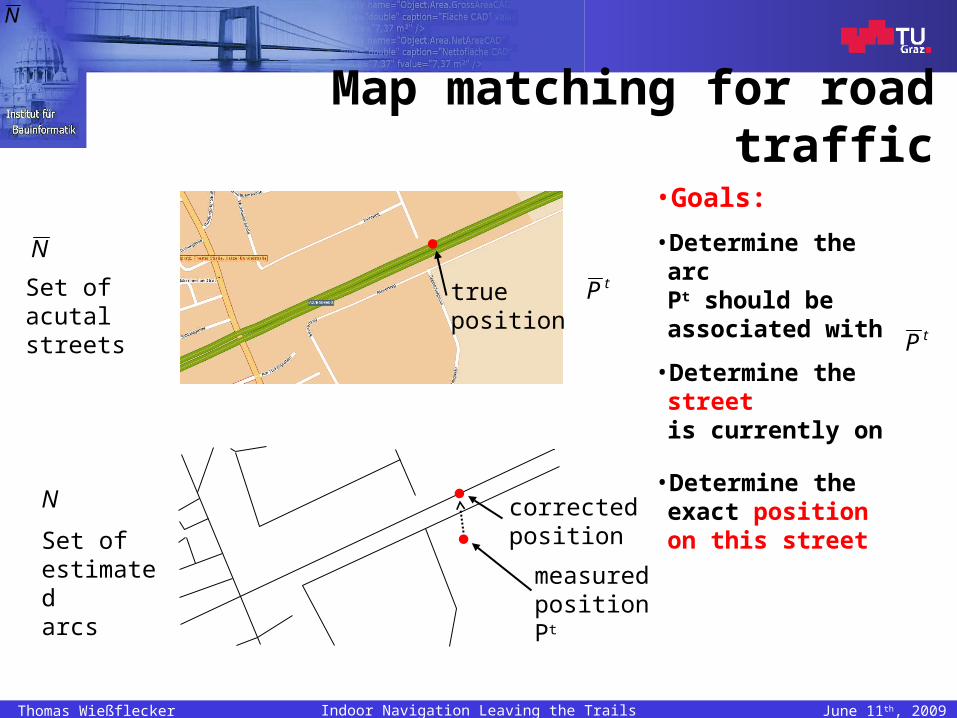
Map matching for road traffic
true position
corrected position
measured position Pt
Set of acutal streets
N
Set of estimatedarcs
N
tP
•Goals:
• Determine the arcPt should be associated with
• Determine the streetis currently on
• Determine the exact position on this street
N
tP
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
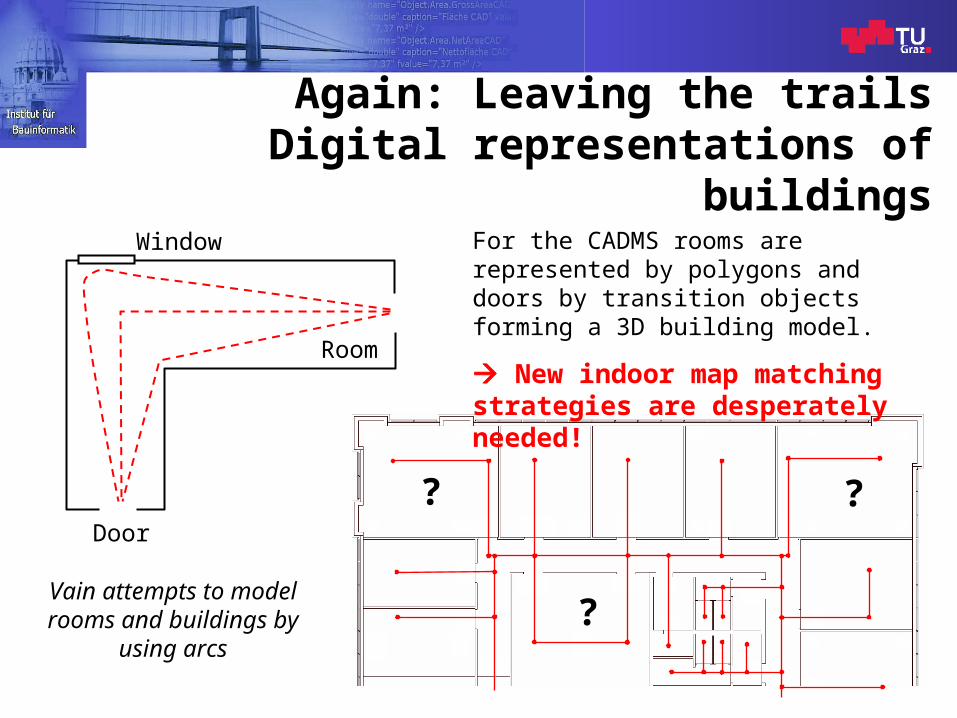
Again: Leaving the trailsDigital representations of buildings
Room
Door
?
Window
Vain attempts to model rooms and buildings by
using arcs
For the CADMS rooms are represented by polygons and doors by transition objects forming a 3D building model.
New indoor map matching strategies are desperately needed!
?
?
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
Indoor positioning
Improvement of plausibility and accuracy by integration of inertial measurement data and BIM data
• Automatic repositioning– Innovative map matching algorithms taking the geometry
of the building into account
• Manual repositioning– Correction of the displayed position by user interaction
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
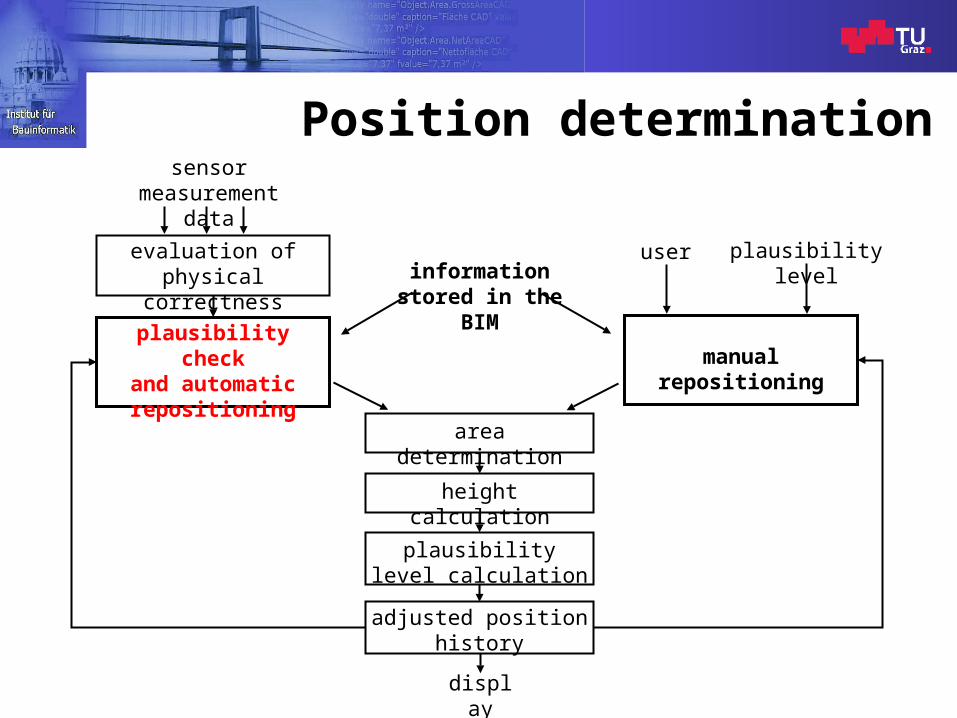
Position determination
evaluation of physical correctness
plausibility checkand automaticrepositioning
manual repositioning
area determination
height calculation
plausibility level calculation
adjusted positionhistory
sensormeasurement data
user plausibility levelinformationstored in the
BIM
display

Decisions and subsystems
for automatic repositioning
Applied for each position measured by the IMU
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
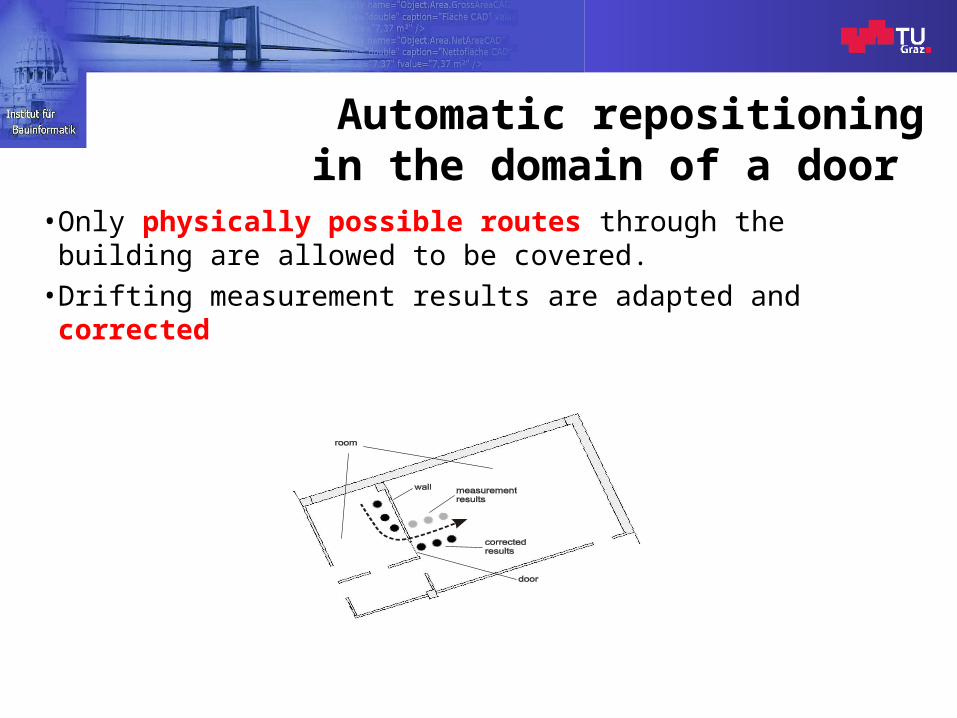
Automatic repositioningin the domain of a door
• Only physically possible routes through the building are allowed to be covered.
• Drifting measurement results are adapted and corrected.
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
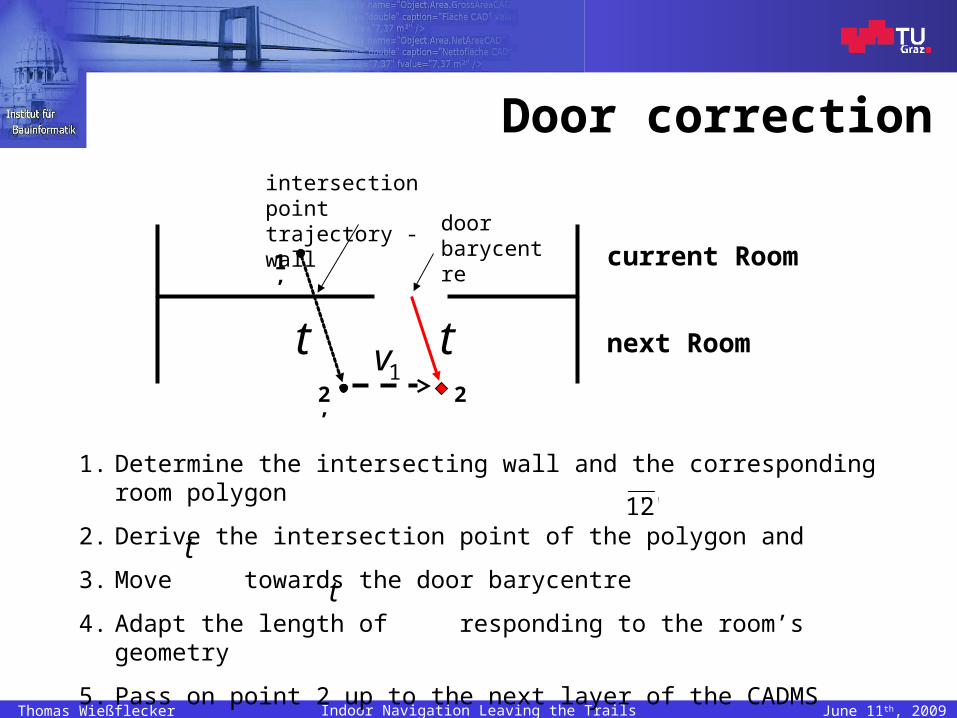
Door correction
current Room
next Room
1’
2’
intersection pointtrajectory - wall
door barycentre
t
t
21v
1. Determine the intersecting wall and the corresponding room polygon
2. Derive the intersection point of the polygon and
3. Move towards the door barycentre
4. Adapt the length of responding to the room’s geometry
5. Pass on point 2 up to the next layer of the CADMS
'2'1
t
t
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
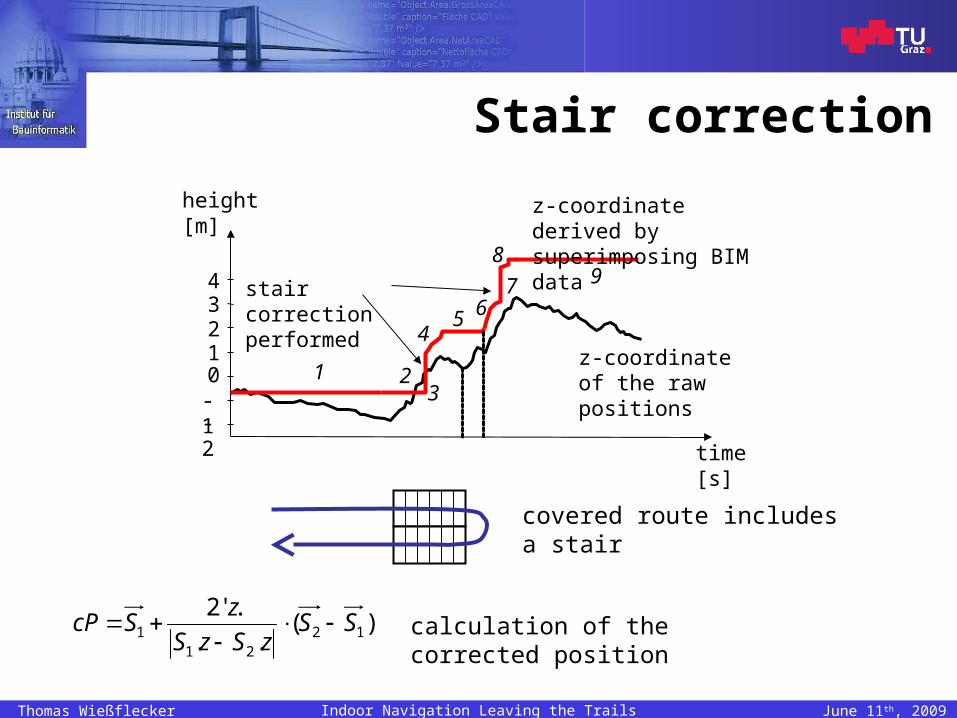
Stair correction
height [m]
time [s]
012
-1-2
34 stair correction
performed
z-coordinate of the raw positions
z-coordinate derived by superimposing BIM data
23
45
1
7
89
6
)(..
'.212
211 SS
zSzS
zScP
covered route includes a stair
calculation of the corrected position
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
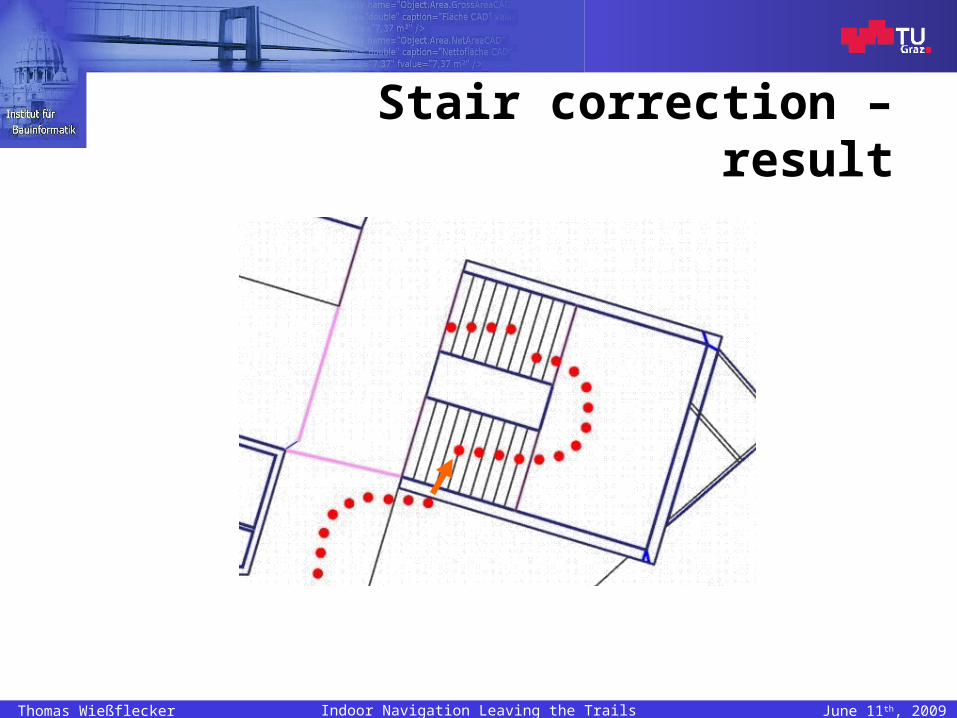
Stair correction – result

Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
Manual repositioning
• Adaptation of measurement results by user interaction and short commands
• Repositioning (with reference points)
– Changing the room
– Changing the floor
– Entering/leaving the building
– Entering clearly identifiable areas: stairs, doors etc.
– Communicating the room number of the roomcurrently staying in
– …

Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
Manual repositioning (examples)
Determine the absolute position with a reference point (door object)
“door on the left!”,“door on the right!”
Belated correction of entering the wrong room on the digital floor plan on the head mounted display
“other room!”
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
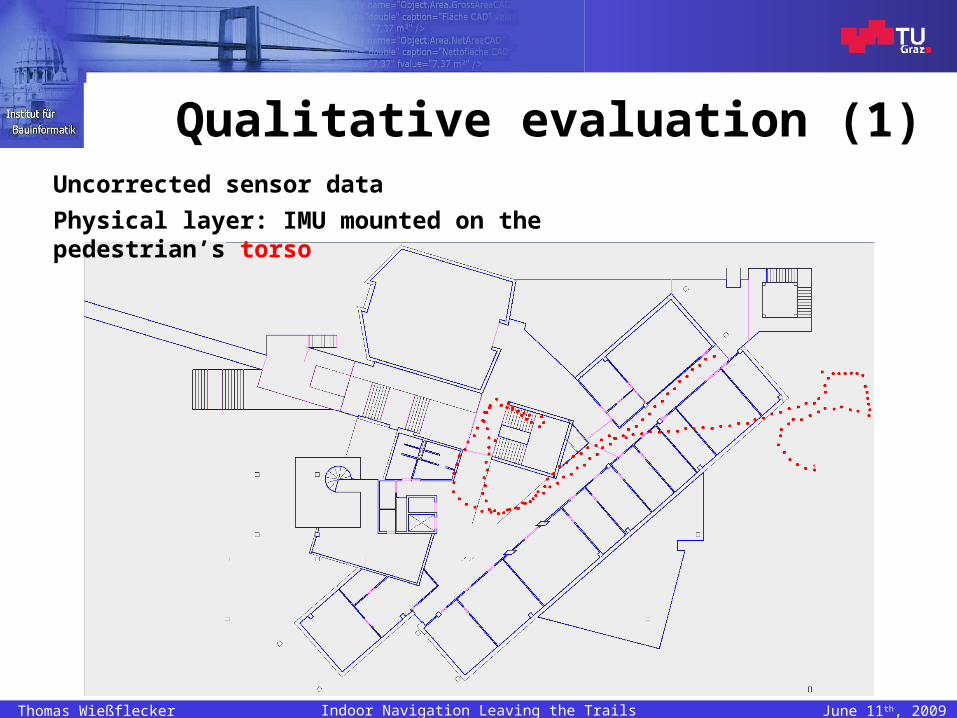
Qualitative evaluation (1)Uncorrected sensor data
Physical layer: IMU mounted on the pedestrian’s torso
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
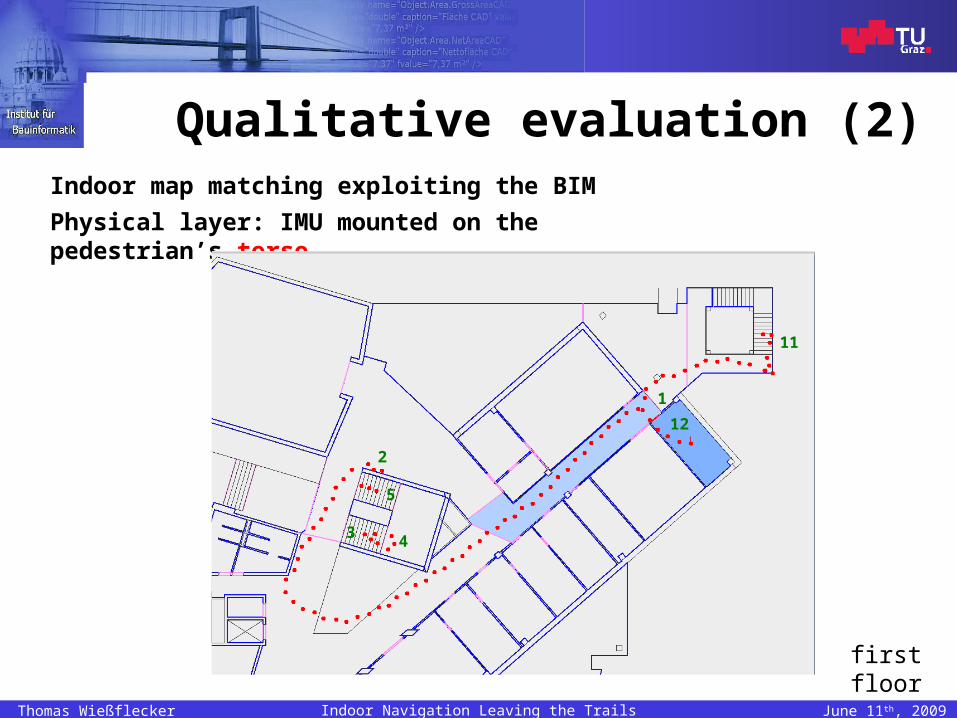
Qualitative evaluation (2)Indoor map matching exploiting the BIM
Physical layer: IMU mounted on the pedestrian’s torso
2
3 4
5
11
12
1
first floor
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
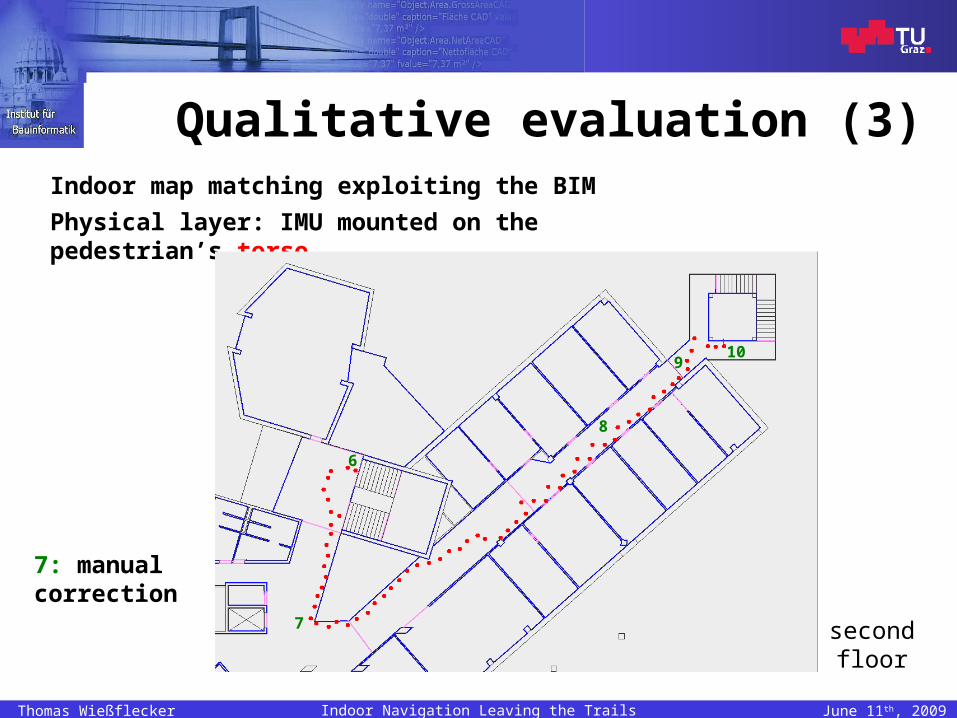
Qualitative evaluation (3)Indoor map matching exploiting the BIM
Physical layer: IMU mounted on the pedestrian’s torso
second floor
6
7
8
910
7: manual correction

Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
Qualitative evaluation (4)Physical layer: IMU mounted on the pedestrian’s foot
Uncorrected sensor data
Indoor map matching
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
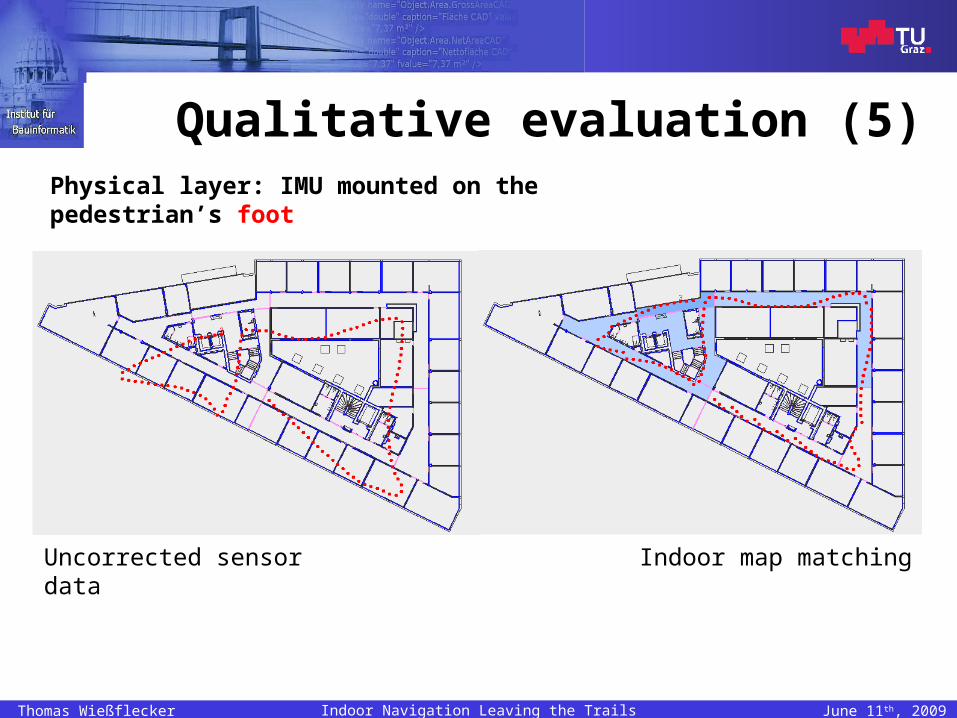
Qualitative evaluation (5)Physical layer: IMU mounted on the pedestrian’s foot
Uncorrected sensor data Indoor map matching

Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
Outcomes and conclusions (1)
• The measurement results reveal that the developed approach to providing seamless autonomous indoor positioning can function in practice.
• This is shown by using two different sensor subsystems and working with different building geometries.
Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
Outcomes and conclusions (2)
• The combination of static BIM data and dynamically generated sensor data improves the accuracy of indoor positioning significantly.
• Providing more intelligent algorithms for the automatic repositioning helps avoiding time-consuming user interaction.
• A trade-off between intensive building modelling and greater positioning accuracy has to be made.

Indoor Navigation Leaving the TrailsThomas Wießflecker June 11th, 2009
Future work
• Refinement of algorithms for the automatic repositioning techniques
• Standardisation of the BIM’s structure• Optimisation of the user interface• Tests during regular fire practices• Et cetera
Thank you for your attention!
Recommended

















