1
2 Force Systems
Force, Moment, Couple and Resultants

3
Force Definition
• Force is an action that tends to cause acceleration of an object. [Dynamics]
• The SI unit of force magnitude is the newton (N). • One Newton is equivalent to one kilogram-meter per second
squared (kg·m/s2 or kg·m · s – 2)
F
F
Examples of mechanical force include the thrust of a rocket engine, the impetus that causes a car to speed up when you step on the accelerator, and the pull of gravity on your body.
• Force is a vector quantity (why?)
Force can result from the action of electric fields, magnetic fields, and various other phenomena.
• Force is the action of one body on another. [Statics]

4
FORCE SYSTEMS
Force is a vector F
Line of action is a straight line colinear with the force
coplanar if the lines of action lie on the same plane
Force System:
concurrent if the lines of action intersect at a point
parallel if the lines of action are parallel
y
x
AF
BF
CF
DF
pararell coplaner ?

Hand Print
Scalar
Vector
Unit Vector
Magnitude of Vector
Writing Convention
F F F
F
ˆ i i
F
F FF
same symbol
Recommended Style
In this course, you have to write in this convention.
ˆ i i

7
FORCE SYSTEMS
2-D Force Systems 3-D Force Systems
Moment
Couple
Resultants
Moment
Couple
Resultants
Vector (2D&3D)Basic Concept

8
2V
Free Vectors: associated with “Magnitude” and “Direction”
: Direction
or V| |V
Magnitude:
V
or V
Vector :
2V
1V
1 2 V V V
1V
2V
V
1 2
1 2
= ( 1)
V V V
V V
V
W aV W
| | | |W a V
parallelogram
( ) ( )
( )
( )
a bA ab Aa b A aA bA
a A B aA aB
Representation 1 2( )V V V
( ) ( )
A B B A
A B C A B C
1V 2V
V
triangle( 0)a M
| | | |M b V
( 0)b
2V
1V
+ˆ ˆA A e Ae
ˆ
(unit vector of )
AAeA
A

9
Operation Addition #5
R A B B ACommutative
Vector

10
Operation Addition #6Vector
( ) ( )R A B C A B C A B CAssociative

11
Operation Scalar Multiplication #2
( ) ( )
( )
( )
a bA ab Aa b A aA bA
a A B aA aB
ˆ ˆA A e Ae
ˆ unit vector of e A
associative
distributive wrt scalar addition
distributive wrt vector addition
wrt = with respect to

13
Component Resolution of a Vector
A vector may be resolved into two components.
R A B
Vector
| | ? | | ?A B

14
Basic relations of Triangle (C/6, law of cosine, sine)
2 2 2 2 cosc a b ab
sin sin sina b c
a
bc
Law of cosine
Law of sine

1V
2V V
1
2
15
1 ___V
2 ___V
(Law of sine)
(Law of sine)
Given V, and , find 1 2,V V
2 2 2 2 cosc a b ab
sin sin sina b c
a
bc
Law of cosine
Law of sine
Hint

16
special case: projection vectors are orthogonal to each other
Vector Component and Projection
a
: vector components of (along axis a and b)
1 2F F R
21, FF R
: projections of (onto axis a and b)
aF
R
b
bF
R
aF
1F2F
(generally)a bF F R
a
b
bF
R
aF
ba FF
, : orthogonal projections & vector components
bF
=

17
Rectangular Components• Most commonly used
22yx FFF
xF
yF
1tan | / |y xF F
yx FFF
ˆ ˆ x yF F i F j
x
y
)directions and (in
of components vector ,
yx
FFF yx
)directions and (in
of componentsscalar ,
yx
FFF yx
F
xF
yF
ˆ ˆ i j vector component = vector projection
i
jcosF sinF

p
18
x
y
F
Fx=? Fy=?
x
yF
y
F
x
cosxF F
sinyF F
cosxF F
sinyF F
x
yF
sin( )xF F p
cos( )yF F p
sin( )xF F
cos( )yF F
= sinF
( cos ) cos
FF
minus
(>90)

19
ˆ ˆ7.7 4.6i j
EXAMPLE 2-1
Given the magnitude of the tensionin the cable, T = 9 kN, express T interms of unit vector i and j
j)sin9(i)cos9(T
j662.1169i
662.11109
kN ANS
T
i
j
x
y
2 210 6 11.662 mAB
Correct?3 S.F. ˆ ˆ7.72 4.63i j

20
We are using robot arm to put the cylindrical part into a hole.Determine the components of the force which the cylindrical part exerts on the robot along axes (a) parallel and perpendicular to arm AB
(b) parallel and perpendicular to arm BC
arm AB
sin45 90sin45 63.64 ( )parP P N
cos 45 90cos 45 63.64 ( )perP P N ANS
60
45
arm BC
sin 30 9sin 30 4.5 ( )perP P N
cos30 9cos30 7.794 ( )parP P N ANS
15
P = 90 N15
30
30
15
15
P = 90 N
parper
par per
Defining direction

21
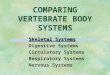
2/2 Combine the two forces P and T, which act on the fixed structure at B, into a single equivalent force R
P=800 N (8cm)
1 6sin 60tan 40.93 6cos60
oo
o
T=600 N (6cm)
R
525 N (5.25cm) R
Graphics
Geometric
P
T
R
2 2 2 2 cosR P T PT 524 NR
sin sinT R 48.6o
Vector Component (Algebraic)
ˆ800P i ˆ ˆ600(cos sin )T i j
ˆ ˆ346 393R P T i j
2 2346 ( 393) 524 NR
1 393tan 48.6346
o
49o
Point of application is B
Correct?

22
Example Hibbeler Ex 2-1 #1
2 21 2 1 2 2 cos
213 NRF F F FF
Determine the magnitude and direction of the resultant force.
Geometric
2 150 212.55 sin sin sin sin115
39.101 39.1
RF F
Two forces is not acting at the same point.

23
2 21 2 1 22 cos
213 NRF F F FF
Geometric
2 150 212.55sin sin sin sin115
39.101 39.1
RF F
1
02
ˆ ˆ100cos15 100sin15 Nˆ ˆ150sin10 150cos10 No
F i j
F i j
Vector Component (Algebraic)
1 2
1 1
ˆ ˆ122.64 173.60 N
173.60tan tan 54.761122.64
R
Ry
Rx
F F F F i j
FF
Good? (get full score?)
- more explanation
- mark answer
- 5S.F. Then 3S.F. ˆ ˆdirection of , ?i j

24
Good Answer Sheet
2 21 2 1 2
2 2
2
Using the law of cosine:
2 cos
100 150 2(100)(150)cos115212.55 213 N #
Applying the law of sine:150 212.55
sin sin sin sin11539.101 39.1 #
R
R
R
F F F FF
F
F F
O
Geometric

25
Point of Application

26
Example Hibbeler Ex 2-6 #1
1
2
ˆ ˆ(600cos30 600sin30 ) Nˆ ˆ( 400sin45 400cos 45 ) N
F i j
F i j
Vector

27
Example Hibbeler Ex 2-6 #2
1 2
2 2
1 1
ˆ ˆ ˆ ˆ(600cos30 600sin30 ) ( 400sin45 400cos45 )ˆ ˆ236.77 582.84 N
236.77 582.84629.10 629 N #
tan ( ) tan (582.84 236.77)
67.891 67.9 #
R
R
R
Ry Rx
R
F F F
i j i j
F i
F
F F
F
j
Vector

28
1F
2F
F1y
F1x
F2y
F2x
Ry
Rx
y
xo
• Reference axis (very very important)– Many problems do not come with ref. axis.– Assignment based on convenience/experience
)ˆˆ()ˆˆ( 221121 jFiFjFiFFFR yxyx
jFFiFFjRiR yyxxyxˆ)(ˆ)(ˆˆ
2121
xxxx FFFR 21
yyyy FFFR 21
The calculations do not reveal the point of application of the resultant force.
R1. Graphically
• Vector summation (addition)– Three ways to be mastered
2. Geometrically
3. Vector component (algebraically)
2 2 21 2 1 22 cosR F F F F
2
sin sin( )R F
Originally pass through O
In case where forces do not apply at the same point of application, you have to find it too!

29
Recommended Problem2/9, H2-17, 2/12, 2/26, H2-28

31
Three Dimensional Coordinate System
ik
y
x
z
j Real-life Coordinate System is 3D.
Introduce rule for defining the 3rd axis - “right-hand rule”: x-y-z - for consistency in math calculation (cross vector)
How does 2D differs from 3D?
y
x
z
2D

32
ˆFn
- If you known the magnitude and all directional cosines, you can write force in the form of
Rectangular Components (3D)y
x
z
Fk
j
i
xy 222
zyx FFFF
)cos( xx FF )cos( yy FF
)cos( zz FF
ˆˆ ˆ i j k
ˆˆ ˆˆ cos cos cosdef
F x y zn i j k
kFjFiFF zyxˆˆˆ
ˆˆ ˆ (cos cos cos ) x y zF F i j k
- cos(x), cos(y), cos(z) : “directional cosines” of
F
iFxˆ
jFyˆ
kFzˆ
- cos2(x)+cos2(y)+cos2(z) = 1
F
Fn is a unit vector in the direction of
z
(maybe +/-)
directional cosine Method
ˆFn
projection & component

33
Example Hibbeler Ex 2-8
2 2 2 cos cos cos 1 x y z
ˆ ˆ ˆcos cos cosx y zF F i F j F k
Find Cartesian components of F
2 2 2cos cos 60 cos 45 1
1cos2
1 1cos ( ) 60° or 1202
1cos 2
ˆ ˆ ˆ(200cos60 200cos60 200cos45 ) Nˆ ˆ ˆ(100 100 141.42 ) Nˆ ˆ ˆ(100 100 141 ) N #
i j k
i j k
F i j k
x
y
z
2 1cos4

34
Given the cable tension T = 2 kN. Write the vector expression of T
)kcosjcosi(cosTT zyx x
y
z
A
B
x A
B
1.2cos x length of AB
2 2 21.2 0.5 (0.4 0.3) 1.3length of AB cos 0.92x
x
1) directional cosine method
directionl cosine = -0.92
Real directional cosine

35
zA
B
08.03.11.0
ABoflength1.0cos z
yA
B
38.03.15.0
ABoflength5.0cos y
x
y
z
A
B
y
x
y
z
A
B
z
Thus, ˆˆ ˆ2 ( 0.92 0.38 0.08 ) kNT i j k ANS

36
cos xx
AA
cos yy
AA
cos zz
AA
Directional Cosines by Graphics
cos2(x)+cos2(y)+cos2(z) = 1

37
- Usually, the direction of force is not given using the directional cosines. Need some calculation.
- Two examples
(a) Two points on the line of action of force is given (F also given).
x
y
z
A (x1, y1, z1)
B (x2, y2, z2)F
ˆ FF F n
ABAB rrr
1 1 1ˆˆ ˆ Ar x i y j z k
kzjyixrBˆˆˆ
222
kzzjyyixxrABˆ)(ˆ)(ˆ)( 121212
212
212
212
121212
)()()(
ˆ)(ˆ)(ˆ)(
zzyyxx
kzzjyyixxFF
2 1 2 1 2 12 2 2
2 1 2 1 2 1
ˆˆ ˆ( ) ( ) ( )ˆ( ) ( ) ( )
ABx x i y y j z z knx x y y z z
Two-Point Method
Positionvector

38Ans
x
yz
BA
0.50.4
0.31.2
( ( ( ( ( (
2 1 2 1 2 1
2 2 22 1 2 1 2 1
ˆ ˆ ˆˆ
x x y y z zF F F
x x y y z z
AB
FAB
i j krF nr
( ( 1 1 1, , 1.2,0,0.3A x y z
( ( 2 2 2, , 0,0.5,0.4B x y z
( ( ( ( ( ( 2 2 2
ˆ ˆ ˆ0.0 1.2 0.5 0.0 0.4 0.32
0.0 1.2 0.5 0.0 0.4 0.3
i j kF ( ˆ ˆ ˆ2 0.92 0.38 0.08
F i j k kN
2) 2-point constructionABr
ˆ FF F n

39
Write vector expression of . Also determine angle x, y, z, of Twith respect to positive x, y and z axes
T
nTT
where n = unit vector from B to A
222 5)5.7(4
k5j5.7i4
k51.0j76.0i41.0 Thus
kN)k51.0j76.0i41.0(10T
ANS
cos 0.41x
76.0cos y
51.0cos z
66x
139y
59z
Consider: T as force of tension acting on the bar

40
Example Hibbeler Ex 2-9 #1
Determine the magnitude and the coordinate direction angles of the resultant force acting on the ring
1 2
2 2 2
ˆ ˆ ˆ ˆ ˆ(60 80 ) (50 100 100 )ˆ ˆ ˆ(50 40 180 ) lb
50 ( 40) 180 lb 191.05 191 lb #
R
R
F F F F j k i j k
i j k
F
Vector

41
Example Hibbeler Ex 2-9 #2
50 40 180ˆ ˆ ˆ191.05 191.05 191.05
ˆ ˆ ˆ0.26171 0.20937 0.94216
RF R Ru F F
i j k
i j k
cos 0.26171 74.8
cos 0.20937 102
cos 0.94216 19.6 #
R
R
R
F x
F y
F z
u
u
u
Vector

42
Example Hibbeler Ex 2-11 #1
Specify the coordinate direction angles of F2 so that the resultant FR acts along the positive y axis and has a magnitude of 800 N.
1 1 1 1 1 1 1
2 2 2 2
ˆ ˆ ˆcos cos cos
ˆ ˆ ˆ(300cos45 300cos60 300cos120 ) Nˆ ˆ ˆ(212.13 150 150 ) N
ˆ ˆ ˆ
x y z
x y z
F F i F j F k
i j k
i j k
F F i F j F k
ˆ(800 ) NRF j
Vector

43
Example Hibbeler Ex 2-11 #2
1 2
2 2 2
2x 2 2
ˆ ˆ ˆ ˆ ˆ ˆ ˆ800 212.13 150 150
ˆ ˆ ˆ ˆ800 (212.13 ) (150 ) ( 150 )
R
x y z
y z
F F F
j i j k F i F j F k
j F i F j F k
Vector

44
Example Hibbeler Ex 2-11 #3
2 2
2 2
2 2
dir. 212.13 700cos 108 dir. 650 700cos 21.8 dir. 0 700cos 77.6 #
xyz
2
2
2
2
2
2
dir. 0 212.13 dir. 800 150
dir. 0 150212 N
650 N
150 N #
x
y
z
x
y
z
x Fy F
z FFF
F
Vector

45
Example Hibbeler Ex 2-15 #1
The roof is supported by cables as shown. If the cables exert forces FAB = 100 N and FAC = 120 N on the wall hook at A as shown, determine the magnitude of the resultant force acting at A.
Force

46
Example Hibbeler Ex 2-15 #2
2 2
ˆ ˆ ˆ ˆ ˆ(4 0) (0 0) (0 4) m 4 4 m
4 ( 4) 5.6569 m
100 N ( )
4 4ˆ ˆ100( )5.6568 5.6568
ˆ ˆ(70.711 70.711 ) N
AB
AB
ABAB
AB
AB
r i j k i k
r
rFr
i k
F i k
Force

47
Example Hibbeler Ex 2-15 #3
2 2 2
ˆ ˆ ˆ ˆ ˆ ˆ(4 0) (2 0) (0 4) m 4 2 4 m
4 2 ( 4) 6 m
120 N ( )
4 2 4ˆ ˆ ˆ120( )6 6 6
ˆ ˆ ˆ(80 40 80 ) N
AC
AC
ACAC
AC
AC
r i j k i j k
r
rF
r
i j k
F i j k
Force

48
Example Hibbeler Ex 2-15 #4
2 2 2
ˆ ˆ(70.711 70.711 ) Nˆ ˆ ˆ(80 40 80 ) N
ˆ ˆ ˆ(150.711 40 150.711 ) N
(150.711) (40) (150.711) N216.86 217 N #
R AB AC
R
F F F
i k
i j k
i j k
F
Force

49
(b) Two Angles orienting the line of action of force are given (, )
y
x
z
F
xF
yFzF
k
j
i
xyF
Resolve into two components at a time
Fx = Fxy cos() = F cos() cos()
Fy = Fxy sin() = F cos() sin()
Fz = F sin()
Fxy = F cos()
Othorgonal projection Method

50
yx
z
F
Fxy
FxFy
Fz
65o50o
cos50 3.21 kNoxyF F
cos65 1.36 kNox xyF F
sin50 3.83 kNozF F
sin 65 2.91 kNoy xyF F
ˆ ˆ ˆ
ˆ ˆ ˆ 1.36 2.91 3.83 kNx y zF F F
F i j k
i j k Ans

y x
z
TAC
B
15o
51
NTT oAB 77315cos
NTT oABy 1155.81cos
NTT oz 20715sin
NTT oABx 7645.81sin
ˆ ˆ ˆ
ˆ ˆ ˆ764 115 207 N
x y zT T T
T i j k
i j k Ans
1 10tan 81.51.5
oCAB
TZ
TAB

52
2/110 A force F is applied to the surface of the sphere as shown.The 2 angles (zeta, phi) locate Point P, and point M is the midpoint of ON. Express F in vector form, using the given x-,y- z-coordinates.

53
• 3D Rectangular Component: 2/99 2/100 2/107 2/110
Recommended Problems

55
Operation Products
1. Dot Products
2. Cross Products
3. Mixed Triple Products
A B
A B
( )A B C
Vector

56
scalar product cosP Q PQ
P
Q
i
jk
ˆ ˆ ˆ ˆ ˆ ˆ ( ) ( )x y z x y zA B A i A j A k B i B j B k
x x y y z zA B A B A B A B
(unit vector) ( three orthogonal vector )
ˆ ˆ ˆ ˆ 0ˆ ˆˆ ˆ 0ˆ ˆˆ ˆ 0
i j j i
i k k i
j k k j
ˆ ˆˆ ˆ ˆ ˆ 1i i j j k k
ˆ ˆ ˆ ˆ ˆ ˆ
ˆ ˆ ˆ ˆ ˆ ˆ
ˆ ˆ ˆ ˆ ˆ ˆ
x x x y x z
y x y y y z
z x z y z z
A i B i A i B j A i B k
A j B i A j B j A j B k
A k B i A k B j A k B k
?P Q
:ˆ ˆ ˆ P 2 3 4
ˆ ˆ ˆ 4 2 5
Example
i j k
Q i j k
?PQ

57
Application of Dot Operation
• Angle between two vectors
1cos
| || |P QP Q• Component’izing Vector
line
U
e/ /U U U
/ /ˆˆ ˆ ( ) U e U e
ˆˆ ˆ= ( ) U U e U e
e
ˆ ˆ( )T e e
ˆ ˆ( )T T e e
which direction?
T
/ /U U
cosP Q PQ
/ / , ?U U
(
:
ˆ ˆ ˆ U 2 3 41 ˆ ˆ ˆˆ 3
Example
i j k
e i j k

58
yx
z
F
Fxy
FxFy
Fz
65o50o
cos50 3.21 kNoxyF F
cos65 1.36 kNox xyF F
sin50 3.83 kNozF F
sin 65 2.91 kNoy xyF F
ˆ ˆ ˆ
ˆ ˆ ˆ 1.36 2.91 3.83 kNx y zF F F
F i j k
i j k Ans

y x
z
TAC
B
15o
59
ˆ ˆ ˆ
ˆ ˆ ˆ764 115 207 N
x y zT T T
T i j k
i j k
2 2 791.55 Nxz x zT T T Ans
1 10tan 81.51.5
oCAB
e
ˆ ˆ( )T e e
ˆ ˆ( )T T e e
ˆˆ764 207xzT i k
which direction??
TZ
TAB

60
A
B
A B
e
= C A B
right-hand rule(A then B)
“Cross Product” of Vectors
line which are perpendicular with both vectors
:sin
magnitudeAB
21 ( )A BAB
def= ˆ ( | | | |sin ) CA B e

61
• Commutative Law is not valid
Operation Cross Product
(
A B B A
A B B A
( ) ( ) ( ) ( )a A B aA B A aB A B a
( ) ( ) ( )A B C A B A C
Laws of Operations
• Associative wrt scalar multiplication
• Distributive wrt vector addition
? A B B A
? A B B A C A B
A
B
C
A
B
B A
( ) ?
( ) ?
( ) ?
B AB A
B A

62
ˆ ˆˆ ˆ ˆ ˆ 0i i j j k k
ik
y
xz
ˆˆ ˆi j k i
jk+
x-y-z complies with right-hand rule
jˆˆ ˆj k i
ˆ ˆ ˆk i j

63
ˆˆ ˆ U U i U j U kzx y
ˆ ˆˆ ˆ ˆ ˆ( ) ( )U V U i U j U k V i V j V kz zx y x y
ˆˆ ˆ ˆ ˆ ˆ( ) ( ) ( )
ˆˆ ˆ ˆ ˆ ˆ( ) ( ) ( )
ˆ ˆ ˆ ˆˆ ˆ( ) ( ) ( )
U V i i U V i j U V i kx x x y x z
U V j i U V j j U V j ky x y y y z
U V k i U V k j U V k kz x z y z z
ˆ ˆ( ) ( )ˆ( )
U V U V U V i U V U V jz z z zy y x xU V U V kx y y x
This term can be written in a determinant form
How to calculate cross product
ˆˆ ˆ V V i V j V kzx y

64
ˆˆ ˆ ˆ ˆ
x y z x y
x y z x y
i j k i jU U U U UV V V V V
ˆˆ ˆ
x y z
x y z
i j kU V U U U
V V V
Cross Product
+ +
- - -
+
ˆˆ ˆ( ) ( ) ( )U V U V U V i U V U V j U V U V kz z z zy y x x x y y x

65
Why cross product?
• Mathematical Representation of Moments, Torque
• Perpendicular Direction• Area Calculation
A
x
y
zA
B
B
C
O
ˆOABCnB AB A
Area = ?A B

66
Mixed Triple Product
ˆ ˆ ˆ
ˆ ˆ ˆ( ) ( )
ˆ ˆ ˆ( )
ˆ ˆ ˆ( ) ( ) ( )
x y z x y z
x y z
x y z
y z z y x z z x x y y z
i j kU V W U i U j U k V V V
W W W
U i U j U k
V W V W i V W V W j V W V W k
( ) ( ) ( ) ( )x y z z y y x z z x z x y y zU V W U V W V W U V W V W U V W V W
( )x y z
x y z
x y z
U U UU V W V V V
W W W
( )V W U
x y z x y z
x y z x y z
x y z x y z
U U U W W WW W W U U UV V V V V V
( ) ( )U V W W U V

67
Why mixed triple product?
• Mathematical Representation of Moments along the axis.
• Volume Calculation
,O FM
Or
Fn
, ,o FM
B
C
ˆOABCnA
: ( )Volume C B A
( ) C B A
Volume must always +

68
Mixed Triple Product Scalar
Operation Product Summary
Cross Product Vector
Dot Product Scalar
Vector

69

72
Homepage URLs Statics official HP http://www.lecturer.eng.chula.ac.th/fmekmn/ (User: Prince Password: Caspian)
Session 1 HPhttp://pioneer.netserv.chula.ac.th/~lsawat/course/statics/
http://blackboard.it.chula.ac.th/ (after the end of registration period)

73
FORCE SYSTEMS
2-D Force Systems 3-D Force Systems
Moment
Couple
Resultants
Moment
Couple
Resultants
VectorBasic Concept

74
Force Definition
• Force is an action that tends to cause acceleration of an object. [Dynamics]
• The SI unit of force magnitude is the newton (N). One newton is equivalent to one kilogram-meter per second squared
(kg·m/s2 or kg·m · s – 2)
F
F
Examples of mechanical force include the thrust of a rocket engine, the impetus that causes a car to speed up when you step on the accelerator, and the pull of gravity on your body.
• Force is a vector quantity (why?)
Force can result from the action of electric fields, magnetic fields, and various other phenomena.
• Force is the action of one body on another. [Statics]

75
Force Representation
• Vector quantity– Magnitude– Direction– Point of application
10 NF
Force
Use different colours in diagrams• Body outline blue• Load red• Miscellaneous black (dimension, angle, etc.)

76
Type of Forces
External force
Internal force
Reactive force
Applied force
Force
Force
Strain
Stress
Contact force
Body force
ForceConcentrated
Distributed
F
F

77
Cables & Springs
T
T
Cable in tension
F
s
F ks
spring constantk
Force

78
2/2 Combine the two forces P and T, which act on the fixed structure at B, into a single equivalent force R
P=800 N (8cm)
1 6sin 60tan 40.93 6cos60
oo
o
T=600 N (6cm)
R
525 N (5.25cm) R
Graphical
Geometric
P
T
R
2 2 2 2 cosR P T PT 524 NR
sin sinT R 48.6o
Algebraic
ˆ800P i
ˆ ˆ600(cos sin )T i j
ˆ ˆ346 393R P T i j 2 2346 ( 393) 524 NR
1 393tan 48.6346
o
49o
Point of application is BCorrect?

79
Not OK. !
How to add sliding vectors (forces)?
AA
2F
1F
1F
2F
A 2F
1F
R
R
21 FFR
is applied at point AR
A 1F
R
Point of Application is wrong
Point of application
Principle ofTransmissibility
Still OK.

F F
F2
F1
F2
F1
FF
F2
F1
R1R2 R R
Point of application
R
This graphical method can be used to find Line of action
Special case: Addition of Parallel Sliding Force
F F
F2
F1
R1
R2
R1
R2
line of action
The better and efficient way will be discussed later, when we learn the concept of “moment”, “couple”, and “resultant force”

81
1 1 cos60 200 NoxT T
1 1 sin 60 346 NoyT T
2 2 693 Nx yR R R
T
VD1
Ty
Txx
y
60
1ˆ ˆ200 346 NT i j
2ˆ400 NT i
1 2ˆ ˆ600 346 NR T T i j
Point of application,But no physical meaning
Move all forces to that concurrent point
1 o346tan =29.97600
Application Point Ans

82
How to add sliding vectors (forces)?
A
A
2F
1F
1F
2F
R
21 FFR
is applied at point AR
Point of application
There is better way to find the point of application(or line of action), but you have to learn the concept ofmoment and couples first.

84
moment axis
Moment is a vector
MomentIn addition to the tendency to move a body, force may also tend to rotate a body about an axis
From experience (experiment)magnitude depends only on “F” and “d”
(magnitude)summation
Direction
M Fd i i
i
M Fd

85
Moment Definition
xFx
y
z
yd
O
( )O zM• Moment is a vector quantity.
– Magnitude– Direction– Axis of Rotation
• The unit of moment is N·m• The moment-arm d (perpendicular distance)• The right-hand rule• determined by vector cross product• Sign convention: 2D +k or CCW is positive.• Moment of a force or torque

86
Moment about point A :
Mathematical Definition (3D)
r F
Ar
d
M F
,A FM r F
-Magnitude:
-Point of application: point A-Direction: right-hand rule
+
(Unit: newton-meters, N-m)
MFd
F
- 2D, need sign convention and be consistent; e.g. + for counter- clockwise and – for clockwise
2D
X
from A to point of application of the force
d
| || | sinr F Fd

The moment of a force about any point is equal to the sum of the moments of the components of the force about that point
87
can be used with
more than
2 components
+
O
F
x
y d1
d2
xF
yF
Mo = -Fxd2+Fyd1
** OM r F
*1 2OM r F r F
1 2( )F F
Same?
Varignon’s Theorem (Principle of Moment)
( 1 2 1 2!
Yes r F r F r F F
r F
sum of moment (of each force) = moment of sum (of all force)
Useful with rectangular components

88
Principle of Transmissibility & Moment
A
O
O
r
d
F
M
X
YZ
FrM
M = Fr sin = FdSliding force has the same moment
convenient
AX AYr F r F
- direction: same
- magnitude:
Principle of Transmissibility is based on the fact that“moving force along the line of action causes no effect in changing moment”
position vector: from A to any point on line of action of the force.

89
d
Sample 2/5 Calculate the magnitude of the moment about the base point O of 600N force in five different ways.
600N
400
4m
2mA
O
Solution I: 2D Scalar Approach
600N400
4m
2m A
O
ood 40sin240cos4
35.4600 dFM O
2610 N-m Ans
m35.4
Solution II: 3D Vector Approach
ˆ 2610 N-m k
OM r F
( ( ˆ ˆ ˆ ˆ2 4 600 cos40 sin 40o o i j i j
CW
x
y
CW or CCW? CWCorrect?

90
600N400
4m
2mA
O
F2
F1
Solution III: Varignon’s theorem
NF o 46040cos6001
NF o 38640sin6002
460(4) 386(2)OM
2610 N-m (CW)
600N400
4m2mA
O
F2
B
d1
F1
F2
F1Cd2
Solution IV: Transmissibility
od 40tan241 m68.5
1 1 2610 N-m (CW)OM F d
Solution V: Transmissibility
od 40cot422 m77.6
2 2 2610 N-m (CW)OM F d
+

91
EXAMPLE 2.8
In raising the flagpole, the tension T in the cable must supply a Moment about O of 72 kN-m. Determine T.
15 m
30sin 6025.981m
72 (12)sin 43.898Td T
8.65T kN
1 25.981tan 43.89812 15
ANS
60o12 m
30 m
d

92
Example Hibbeler Ex 4-7 #1
Determine the moment of the force about point O.
ˆ ˆ(400sin30 400cos30 ) Nˆ ˆ(200 346.41 ) N
F i j
i j
Moment
Correct? ˆ ˆ , ?i j

93
Example Hibbeler Ex 4-7 #2
ˆ ˆ ˆ
0.4 0.2 0 N-m200 346.41 0
0.4 0.2 ˆ N-m200 346.41
ˆ ˆ98.564 98.6 N m
O
i j kM r F
k
k k Ans
r
Moment
ˆ ˆ(400sin30 400cos30 ) Nˆ ˆ(200 346.41 ) N
F i j
i j
400sin 30(0.2) 400cos 30(0.4)40 138.56 98.564 N m
ˆ98.6 N m #
O
O
M
M k
Q
ˆ ˆ(0.4 0.2 ) mr i j
3D Vector Approach
Scalar Approach (Varignon’s theorem)

94
Couple- Couple is a summed moment produced by two force of equal magnitude but opposite in direction.
O
F
F
ad
+
M = F(a+d) – Fa = Fd
magnitude does not depend on distance a (point O),i.e. any point on the body has the same magnitude.
Couple Fd
- tendency to rotate the “whole” object.
- no effect on moving object as translation.
2D representations: (Couples)
C
couple is a free vector
C C
Effect of Pure Rotation

96
A
F
B
AF
Force-couple systems- Line of action of a force on a body may be changed if a couple is added to compensated for the change in the tendency to rotate of that body.
Procedure may be reversed to combine a force with a couple
Force-couple system
d
F
F
B
A
B F
C
Principle of transmissibility
No changes in net external effect
The direction and magnitude of Force can not be changed, only line of action (i.e. only change to other pararell line)
BAC r F ?C

97
Principle of Transmissibility is based on the fact thatmoving force along the line of action causes no effect in changing moment
FA
B
FA
BC
A
B F
CA
B FC r F
from new location (B)to old location (A)
r
FA
BF
AB
No Moment:Principle of Transmissibility

98
In the viewpoint of Mechanics,Result of force to these systemsare equal
Why using equivalent system?
AF
Force-couple system
B
A
B F
C
Principle of transmissibility
M
real (physical) system
equivalent system equivalent system
All force systems are equal.

99
A
B
D
M
M
M
,
,
,
A F
B F
D F
M
M
M
Understanding Force-Couple system
AF
B
A
BF
C
D D
Moment about point B of force F = tendency of force F to rotate the object at point B
couple occurs when moving Force F from A to B ( couple occurs when moving Force F parallel to its line of action to the point B)
BAr F
DAr F
0
ABr F C
DBr F
C
C
0
Equivalent System

100
Vector Diagram
FF12m
70m
P
P
7012 PF
AnsP703600
51.42 kNP
CCWCW
Be careful of the direction of moment

101
2/11 Replace the force F by an equivalent force-couple system at point O.
kN50F
250 .mm
++ cos 20 (0.1cos 25 0.25cos10 )F
sin 20 (0.1sin 25 0.25sin10 )o o oF
17.3 N-m
Ans
20M
50 kN25
10
x
y 20
50 kN
oM
0.1m
0.25 m
Couple occurred when moving F to O= Moment of F about O
CCWˆ ˆ17.1 46.9 kNF i j
Correct?

102
o 90 90 90 270R F kN
)21(90)12(90)21(90Mo
mkN1080 ANS
Got the meaning?
Moving all 3 forces to point O
Sum of couples
Engine number 3 fails. Determine the force-couple system on the body about point o.
couples occuring when moving forces.
(direction: left)
(CW)R
M
sum of moments?x
y
+
yF

103
Example Hibbeler Ex 4-14 #1
Replace the current system by an equivalent resultant force and couple moment acting A.
100 400cos 45382.84 N
600 400sin45
882.84 N
Rx x
Rx
Rx
Ry y
Ry
Ry
F F
FF
F F
F
F
Resultant

104
Example Hibbeler Ex 4-14 #2
2 2
2 2
1 1
( 382.84) ( 882.84)962.27 962 N #
882.84tan tan382.84
66.556 66.6 #
R Rx Ry
R
R
Ry
Rx
F F F
FF
FF
100(0) 600(0.4) 400sin45 (0.8) 400cos45 (0.3)
551.13 551 N m #
A
A
A
R A
R
R
M M
M
M
Q
Resultant

105
Ans
6020cos300 ob
0.213 mb
b
300N
20o
60 N-m
Dexactly cancelled
b cos20

107
• Resultant of many forces-couple is the simplest force-couple combination which can replace the original forces/couples without changing the external effects on the body they act on
2/6 Simplest Resultant
2F1F
1R
3F
R
-Add two at a time get line of action of R
-Add many do not get line of action of R
FFFFR
...321 , xx FR yy FR
22 )()( yx FFR )/(tan 1xy RR
xF1
1F
2F
3F
R
y
x
yF1
yF2
yF3
yR
xF2 xF3
xR
Point of application

108
Easier way to get a resultant + its location
any forces + couples system
1) Pick a point (easy to find moment arms)
2F
1F
3F
d1
d2d3
1F
2F
3F
O
F1d1
2) Replace each force with a force at point O + a couple
F2d2
F3d3
R
O
4) Replace force-couple system with a single force
d=Mo/R
3) Add forces and moments
FR
O
Mo=(Fidi)
Mo=Rd
O
arbitrary
(forces + couples : same procedures)
any forces + couples system single-force + special single-couple (wrench)
2D
single-force system (no-couple)
or single-couple system
3D
where
0R
resultant

109
2/87 Determine the resultant and its line of action of the following three loads.
R = ( 2.4cos20 -1.5sin20 -3.6cos20 ) i +( -2.4sin20 -1.5cos20 +3.6cos20 ) j kN
M = -2.4*0.2cos20 -1.5*0.12cos20 -3.6*0.3cos20 kN-m
M
(force-couple system)
O R
Move 3 forces to point O,Sums their force and couples
Note: R is the same regardless with the location point we move the force to
Note: M depends on the location where we move the force to+
why?

110
M = -1.635 kN-m
At point O (0,0)
MO
R
ˆ ˆ1.64 0.99 kNR i j
At point X (x,y)
NMO
RR P
ˆ 1.635 k kNM
0 M N
ˆ ˆ0 ( )M xi yj R
ˆ ˆ0 ( )M xi yj R
ˆˆ ˆ ˆ ˆ( ) ( 1.64 0.99 ) 1.635xi yj i j k
0.99 1.64 1.635x y ( line of action )
couples cancelled
+
P
O (0,0)
P (x,y)ˆ ˆ(0 ) (0 )r x i y j
Two equivalent systems Moment at any pointmust be the same on both system
Sys 1
Sys 2 ˆ ˆ( )xi yj R M
Pick Point O
Correct?

111
M = -1.635 kN-m
At point O (0,0)
MOR
ˆ ˆ1.64 0.99 kNR i j
How to locate Point P
O (0,0)
ˆ 1.635 k kNM
+
d
2 2
| | | 1.635 | 0.853 m| | ( 1.64) ( 0.99)MdR
d
1 1 0.99tan tan 31.1181.64
y o
x
RR
( sin , cos )d d
(0.441, 0.73)
tanP
P
y yx x
( 0.73) 0.990.441 1.64
yx
d2 2 2x y d
1( )tan
y x
Manually Canceling Couples
How to find line of action ?
or
P
PP
O

112
Equivalent System Definition
Two force-couple systems are equivalent
Equivalent System
system I system II
system I system II
( ) ( )
( ) ( )O O
R R
R R
F F
M M
MOR
O
R P
Sys 1 Sys 2

113
A car stuck in the snow. Three students attempt to free the car by exert forces on the car at point A, B and C while the driver’s actions result in a forward thrust of 200 N as shown in picture.
Determine
1) the equivalent force-couple system at the car center of mass G
2) locate the point on x-axis where the resultant passes.
++
( ( jFiFR yx
( i30sin250200200400R
( j30cos250350
j567i925R
x
y
G
R
M
350(1.65) 250sin 30 (0.825)GM
mN690

114
For line of action of resultant
ˆˆ ˆ ˆ ˆ( ) (925 567 ) 690x i y j i j k
ˆ : 567 925 690k x y
At y = 0; x = +1.218 m. ANS
x
y
G
j567i925R
mN690
x
y
G
j567i925R
b
( ) | |y GR b M
567(b)=690b=1.218 m
ˆ ˆ0 ( )M xi yj R
ˆ ˆ( )xi yj R M
Couple Cancellation
If you want to find only b (not line of action itself)
+ or - , you have to find out manually
Sys I
Two equivalent systems Moment at point Gmust be the same on both system
, ,G SysII G SysIM M
Sys II
Two equivalent systems(2D)

115
Determine the resultant (vector) and the point on x and y axes which must pass.
R
R
++x
y
G
( ( jFiFR yx
( ˆ25 20sin 30
ˆ ( 20cos30 30)
i
j
j3.47i15
25(5) 30(9)
(20cos30 )(9) (20sin 30 )(5)oM
mkN351

116
x
y
O
j3.47i15R
mkN351
For line of action of resultant
oMRr
k351)j3.47i15()jyix(
351y15x3.47
If y = 0; x = 7.42 m.
ANS
x
y
O
x = 0; y = -23.4 m.

117
Recommended