Embed Size (px)
Citation preview

Your Home as Doctor:
Smart Homes Enable Medical Diagnosis
D. Schreurs
KU Leuven, Belgium

Outline
• Motivation
• System Architecture
• Blocks’ Design & Experimental Results
• System Design & Experimental Results
• Durability
• Conclusions
2

Motivation
• Observation: ageing population
���� Importance of Ambient Assisted Living
= long-term health monitoring− Fall detection− Localization− Vital signs monitoring
3
0
1000
2000
3000
4000
5000
6000
wo
rld
po
pu
lati
on
(millio
ns)
2015 2050 2100
year
aged 60+
total
Source: bbc.com

Approach: Radar WSN
4
Base Station
Radar
Sensor

WRSN System Architecture
M. Mercuri, et al., "Analysis of an indoor biomedical radar-based system for health monitoring,"
IEEE Trans. Microw. Theory Techn., vol. 61, no. 5, pp. 2061-2068, May 2013. 5

Radar Technologies
typefrequency
bandwidth
ranging
meas.Doppler
complexity
(& costs)
CW narrowband NO YES low
UWB IR UWB YES NO high
SFCW/FMCW
UWB (& narrow band)
YES YES low-medium
f0+∆∆∆∆ff0 f0+(N-1)∆∆∆∆ff
CW SFCWCWCW UWB-IR
6

• fISM ���� fall detection
���� vital signs monitoring
• SFCW waveform ���� localization
f0 = 6 GHz
N = 40
∆∆∆∆f = 25 MHz
RMAX = 6 m
∆∆∆∆R = 15 cm
2.004 sec
T=100 µs2 sec
5.8 GHz
f0 f0+∆∆∆∆f f0+(N-1)∆∆∆∆f
5.8 GHz30 µs
Settling time
M. Mercuri, et al., “Optimised waveform design for radar sensor aimed at contactless health monitoring,”
Electron. Lett., vol. 48, no. 20, pp. 1255-1257, 27 Sep. 2012.
Radar Waveform
7

Outline
• Motivation
• System Architecture
• Blocks’ Design & Experimental Results
• System Design & Experimental Results
• Durability: Energy supply
• Conclusions
8

Radar WSN
9
Base Station
Radar
Sensor

Radar Sensor
M. Mercuri, et al., "Analysis of an indoor biomedical radar-based system for health monitoring,”
IEEE Trans. Microw. Theory Techn., vol. 61, no. 5, pp. 2061-2068, May 2013.10

Antenna Design
• In-door setting = sensor mounted to wall or ceiling
• Antenna design challenges
– avoid backscattering & crosstalk
– semi-spherical radiation pattern
– wideband requirement
TX
RX
target reflection
11

-50
-40
-30
-20
-10
0
1 2 3 4 5 6 7 8 9
Freq (GHz)
Sp
ara
m (
dB
)
S11
S21
Antenna Design
• Ground Plane: backscattering
• Metal Wall: crosstalk (S21)
12
Zigbee Radar
P. J. Soh, et al., “Dual-band Planar Bowtie Monopole for a Fall-Detection Radar and Telemetry System,”
IEEE Antennas Wireless Propag. Lett., vol. 11, pp. 1698-1701, Dec. 2012.

S. Yan, et al., “A low profile dual-band antenna loaded with artificial magnetic conductor for indoor radar systems,”
IET Radar, Sonar & Navigation, 7 pp., 2015.
Design based on Artificial Magnetic Conductor (AMC) layer
• smaller form factor
• no metal wall!
AMC Based Antenna Design
13

S. Yan, et al., “A low profile dual-band antenna loaded with artificial magnetic conductor for indoor radar systems,”
IET Radar, Sonar & Navigation, 7 pp., 2015.
AMC Based Antenna Design
AMC Antenna Reference Antenna
Size (mm3) 56×56×3.12 42×36×32
Low Freq. Band (GHz) 2.395-2.485 2.22-2.48
High Freq. Band (GHz) 5.78-8.89 5.8-6.77
Gain (dB) @ 2.45 GHz 5.05 5.7
Gain (dB) @ 6-7 GHz >7.0 >7.2
FBR (dB) & 2.45 GHz 15 0
FBR (dB) & 6-7 GHz >11 >7.5
Cross coupling (dB) <-25 <-25 (with wall)
FBR = Front-to-Back Ratio
14

Monostatic Radar Architecture
15
LO
RF
(target + unwanted)
baseband
VCOmismatch
isolation
15

Monostatic Radar Architecture
16
received

17
0 1 2 3 4 5 60
20
Range profile (m)
Ma
gn
itu
de
0 1 2 3 4 50
0.006
Range profile (m)
Ma
gn
itu
de
without leakage canceller with leakage canceller
target at 5 m
UNWANTED LEAKAGE TARGET DETECTED
Monostatic Radar Architecture
17

Base Station
18
Microcontroller-based DSP-based
C. Garripoli, et al., “Embedded DSP based Telehealth Radar System for Remote In-door Fall Detection,”
IEEE J. Biomed. Health Inform., vol. 19, no. 1, pp. 92-101, Jan. 2015.

• IFFT on SFCW baseband signals ���� absolute distances
f0 f0+Δf f0+2Δf … f0+(N-1)Δf
C1 C1 C2 … C1N
0 1 2 3 4 50
1
2
3
range profile (m)
ma
gn
itu
de
IFFT
Data Processing: Localisation
19

Data Processing: Localisation
• Compensation ���� remove ‘static’ reflections (e.g., furniture, crosstalk)
• Calibration ���� places the target in the right position
0 1 2 3 4 5 60
1
range profile (m)
mag
nit
ud
e
0 1 2 3 4 50
0,1
range profile (m)m
ag
nit
ud
e
target buried
target detected
Before compensation and calibration After compensation and calibration
crosstalk
Reducing backscattering and crosstalk is fundamental!
Example: Target at 4 m
M. Mercuri, et al., “A practical distance measurement improvement technique for a SFCW-based health monitoring radar,”
ARFTG Microwave Meas. Conf., Jun. 2013. 20

Data Processing: Localisation
Distance
Anechoic Chamber Real Room
% Person1 % Person2 % Metal % Person1 % Person2 % Metal
1 m 100 100 100 100 100 100
2 m 100 100 100 100 100 100
3 m 93.3 96.7 100 90 86.7 100
4 m 93.3 93.3 100 90 83.3 100
5 m 86.67 90 100 76.7 73.3 100
� 30 range profile measurements for each distance and for each target
21

P. Karsmakers, et al., “Automatic in-door fall detection based on microwave radar measurements,”
Eur. Radar Conf., 2012.
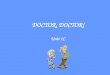
time frame
freq
uen
cy b
in
2 4 6 8 10 12 14
5
10
15
20
25
300.2
0.4
0.6
0.8
1
time framefr
eq
ue
ncy
bin
2 4 6 8 10 12 14
5
10
15
20
25
300.2
0.4
0.6
0.8
1
0 1 2-5
0
4
time (s)
sta
nd
ard
ize
d a
mp
litu
de
0 1 2-5
0
5
time (s)
sta
nd
ard
ize
d a
mp
litu
de
WALKING FALLING
Data Processing: Fall Detection
Classification approach: LS-SVM-GA
22

0 60 120
normal movement
falling
time (s)
falling
Real-Time Fall Detection
• Sliding window approach
= Segmentation
• Real-time operation
• ~316 ms maximum delay
C. Garripoli, et al., “Embedded DSP based Telehealth Radar System for Remote In-door Fall Detection,”
IEEE J. Biomed. Health Inform., 2014. 23

SPEED MEASUREMENTS:
− Sensor fixed to the wall or ceiling
− Falls over different orientations
− 3 subjects
Fall Detection: Sensor Positioning
24M. Mercuri, et al., “Analysis of a Fall Detection Radar placed on the Ceiling and Wall,” APMC, Nov. 2014. 24

1.7 2.2 2.70.8
1.6
2.4
time (s)
am
plitu
de (
V)
I channel
Q channel
2.5 3 3.51.1
1.6
2.1
time (s)
am
plitu
de (
V)
I channel
Q channel
3 3.5 40.6
1.6
2.6
time (s)
am
plitu
de (
V)
I channel
Q channel
1 1.5 21.4
1.6
1.8
time (s)
am
plitu
de (
V)
I channel
Q channel
2.8 3.3 3.81.4
1.6
1.8
time (s)
am
plitu
de
(V
)
I channel
Q channel
2 2.5 31.4
1.6
1.8
time (s)am
plitu
de (
V)
I channel
Q channel
falling
0°
falling
90°
walking
0°
WALL CEILINGWALL
� Falls have an important vertical motion component
� Doppler effect limitation
Fall Detection: Sensor Positioning
CEILING
25

Fall Detection: Sensor Positioning
Angle
( °°°°)
CEILING WALL
Subject 1 Subject 2 Subject 3 Subject 1 Subject 2 Subject 3
0 3 3 3 3 3 3
30 3 3 3 3 3 3
60 3 3 3 0 0 0
90 3 3 3 0 0 0
120 3 3 3 0 0 0
150 3 3 3 3 3 3
180 3 3 3 3 3 3
210 3 3 3 3 3 3
240 3 3 3 0 0 0
270 3 3 3 0 0 0
300 3 3 3 0 0 0
330 3 3 3 3 3 3
� Radar to the ceiling ���� to overcome Doppler effect limitation
− 3 mimicked frontal falls per target/position
26

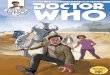
Sensor Positioning: Breathing
27
Wall (Sensor 3 - lateral)Wall (Sensor 4 - frontal)
0 1 2 3 4 50
0.004
X: 0.3967
Y: 0.004436
Frequency (Hz)
Magnitude
0 1 2 3 4 50
0.02
X: 0.3662
Y: 0.02129
Frequency (Hz)
Magnitude
Person Sitting on a Chair

0 1 2 3 4 50
0.02
X: 0.3662
Y: 0.02051
Frequency (Hz)
Mag
nit
ud
e
0 1 2 3 4 50
0.02
X: 0.3357
Y: 0.02342
Frequency (Hz)
Mag
nit
ud
e
0 1 2 3 4 50
0.008X: 0.3357
Y: 0.00771
Frequency (Hz)
Mag
nit
ud
e
0 1 2 3 4 50
0.01
X: 0.3662
Y: 0.01426
Frequency (Hz)
Mag
nit
ud
e
→→→→ Clear benefit of having radar sensor network!
Prone
Supine
Ceiling (Sensor 1) Wall (Sensor 4)
Sensor Positioning: Breathing
28

Breathing Heart beat
Vital Signs Monitoring
29

Outline
• Motivation
• System Architecture
• Blocks’ Design & Experimental Results
• System Design & Experimental Results
• Durability
• Conclusions
30

Radar WSN
31
Base Station
Radar
Sensor

Wireless Radar Sensor Network
• Challenges: synchronization & avoiding interference
� Radar operation
�Speed: FDM among radar sensors
�Localisation: TDM
→ one sensor at a time
� Wireless communications
�TDM: Zigbee and radar sensing
�TDM: 4 ms delay among sensors
���� THE SENSORS VIRTUALLY OPERATE AT THE SAME TIME!!!
M. Mercuri, et al., “Dual-Mode Wireless Sensor Network for Real-time Contactless In-door Health Monitoring,”
IMS, 2015. 32

Experimental Setup
33

���� Errors within the radar resolution of 15 cm!
Localisation
34

Experimental Setup
35

Fall DetectionSensor 1
Sensor 2
Sensor 3
Sensor 4
• Fall is not detected by
Sensor 2
• Multiple sensors expand
coverage range and
improve detection
reliability!
36

Outline
• Motivation
• System Architecture
• Blocks’ Design & Experimental Results
• System Design & Experimental Results
• Durability: Power supply
• Conclusions
37

Smart Homes: Durability
38
Sensor Power consumption
Zigbee node 40 mW
Temperature sensor 0.5 mW
IR motion detector 0.3 mW
Biomedical sensor > 100 mW
Power needs
(order of magnitude)

Power consumption radar sensor
• using off-the-shelf components:
– wireless communications (Zigbee): 40 mW
– radar sensing: >100 mW
– microcontroller: 100 mW
• using dedicated chip design: 50 mW - 100 mW expected
39
Smart Homes: Energy Needs

Smart Homes: WPT?
40
≠ RFID
Base station Sensor Node
Wireless Power
Control Data
Application Data
Challenge: Single antenna @ Sensor Node

Regulations
Frequency Bands for Non-Specific Short Range Devices in Europe
Ref: Electronic Communications Committee ����
Single base station is not feasible
41

Base stations
Sensor Node
Wireless Power
MISO WPT
42

MIMO WPT
Base stations Sensor Nodes
Wireless Power
43

WPT & Data Receiver
X. Zhou, et al.,
IEEE Trans. Comm.,
2013.
T.J. Lee, masterthesis,
KU Leuven, 2016.
Boost regulator
ADC
44

Experimental Results
• Modulation scheme such that received symbols are clear
• Received data signal is based on baseband intermodulation
products of multisine RF excitation
T.J. Lee, masterthesis,
KU Leuven, 2016.
45

Conclusions
Wireless radar sensor networks:
= viable technology for Smart Homes!
46