Embed Size (px)
Citation preview
1
Young Engineers’Remote Vehicle Competition
IntroductionVehicles that can be used without a driver on board are called ‘remote vehicles’.Such vehicles are used in a wide range of situations, such as:
• bomb disposal - remote vehicle contains video cameras and a water disrupter,which disarms a bomb using a powerful blast of water;
• AGV systems - automated guided vehicles are commonly used in factories tomove products or parts from one place to another;
• space exploration - remote vehicles have been designed to explore the surfaceof Mars to help scientists build up a terrain map;
• film and television - cameras are sometimes attached to remote vehicles tocapture scenes on film automatically;
• difficult terrain - remote vehicles are used in hazardous, unpredictableenvironments, such as the inside of a nuclear reactor;
• grass cutting - vehicles have been developed that will automatically cut grasswithin a marked-out area;
• hospitals - in some hospitals vehicles are programmed to take medical suppliesto patients, which gives the nurses and doctors more time for other matters;
• golf caddy - vehicles can be programmed with a map of a golf course and willtransport a golfer’s set of clubs from one hole to the next.
The Sealion Mk2 VT remotevehicle can operate at depthsdown to 1000 metres.
2
Young Engineers’ Remote Vehicle Competition
aaaaaaaaaaaaaaaaaaaaaDesign SituationThe oil and gas industry relies on remote vehicles to carry out tasks on the seabed.The vehicles can work at depths up to 40 times deeper than humans can dive to andare usually programmed in advance to carry out the tasks. To enable some newresearch to be carried out, a remote vehicle is needed that will automatically collectrock samples from an area of the seabed.
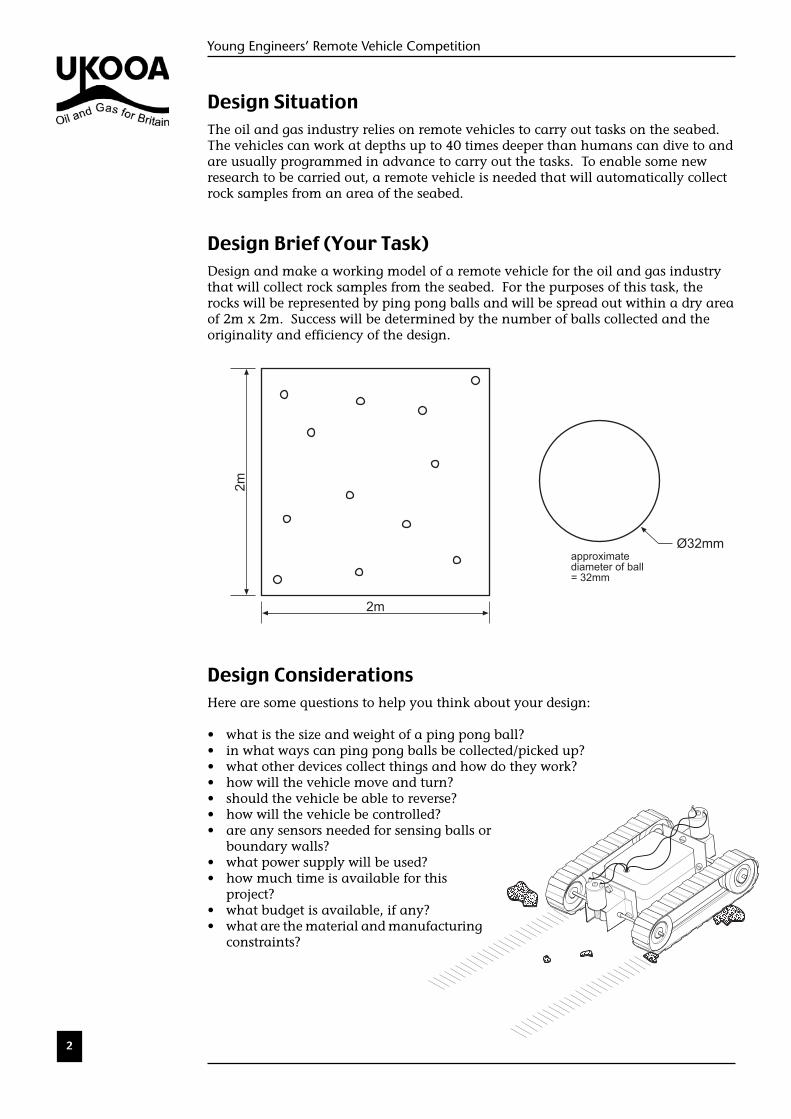
Design Brief (Your Task)Design and make a working model of a remote vehicle for the oil and gas industrythat will collect rock samples from the seabed. For the purposes of this task, therocks will be represented by ping pong balls and will be spread out within a dry areaof 2m x 2m. Success will be determined by the number of balls collected and theoriginality and efficiency of the design.
Design ConsiderationsHere are some questions to help you think about your design:
• what is the size and weight of a ping pong ball?• in what ways can ping pong balls be collected/picked up?• what other devices collect things and how do they work?• how will the vehicle move and turn?• should the vehicle be able to reverse?• how will the vehicle be controlled?• are any sensors needed for sensing balls or
boundary walls?• what power supply will be used?• how much time is available for this
project?• what budget is available, if any?• what are the material and manufacturing
constraints?
2m
2m
Ø32mmapproximatediameter of ball= 32mm
3
Young Engineers’ Remote Vehicle Competition
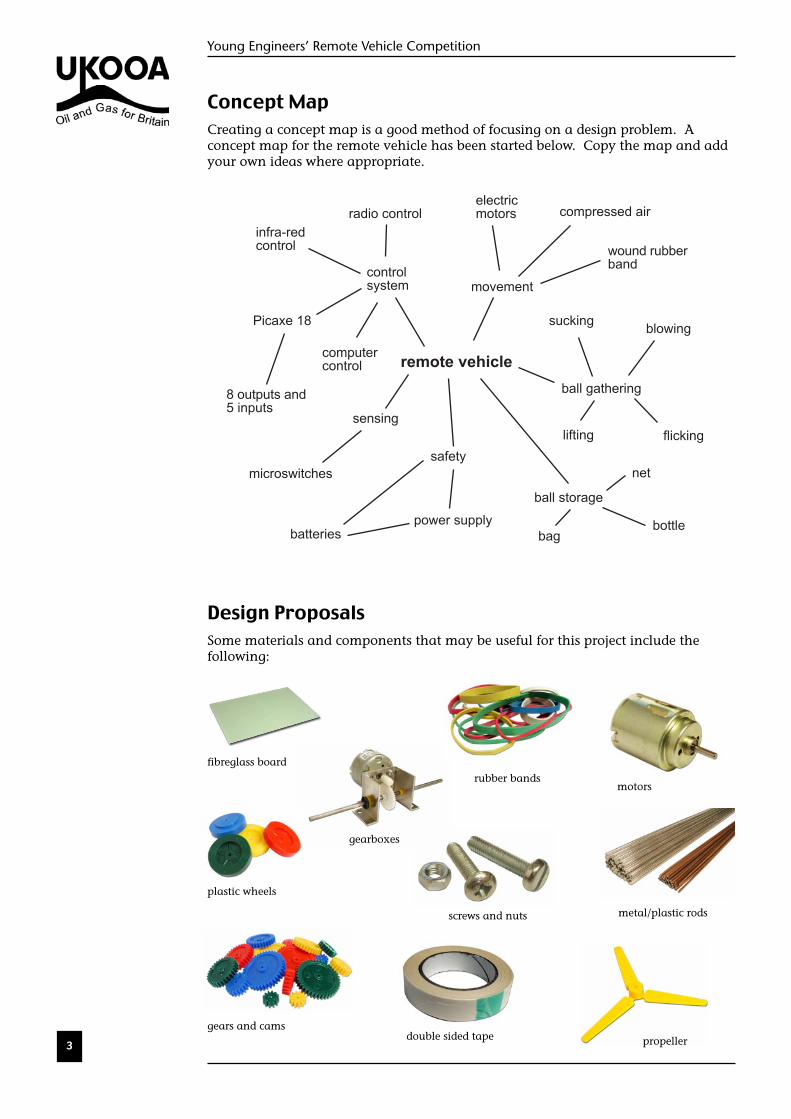
Concept MapCreating a concept map is a good method of focusing on a design problem. Aconcept map for the remote vehicle has been started below. Copy the map and addyour own ideas where appropriate.
Design ProposalsSome materials and components that may be useful for this project include thefollowing:
fibreglass board
plastic wheels
gears and cams
gearboxes
screws and nuts
double sided tape
rubber bandsmotors
metal/plastic rods
propeller
remote vehicle
controlsystem
Picaxe 18
radio controlinfra-redcontrol
8 outputs and5 inputs
movement
electricmotors compressed air
wound rubberband
ball gathering
suckingblowing
flickinglifting
ball storage
net
bottlebag
sensing
microswitches
power supply
safety
batteries
computercontrol
4
Young Engineers’ Remote Vehicle Competition
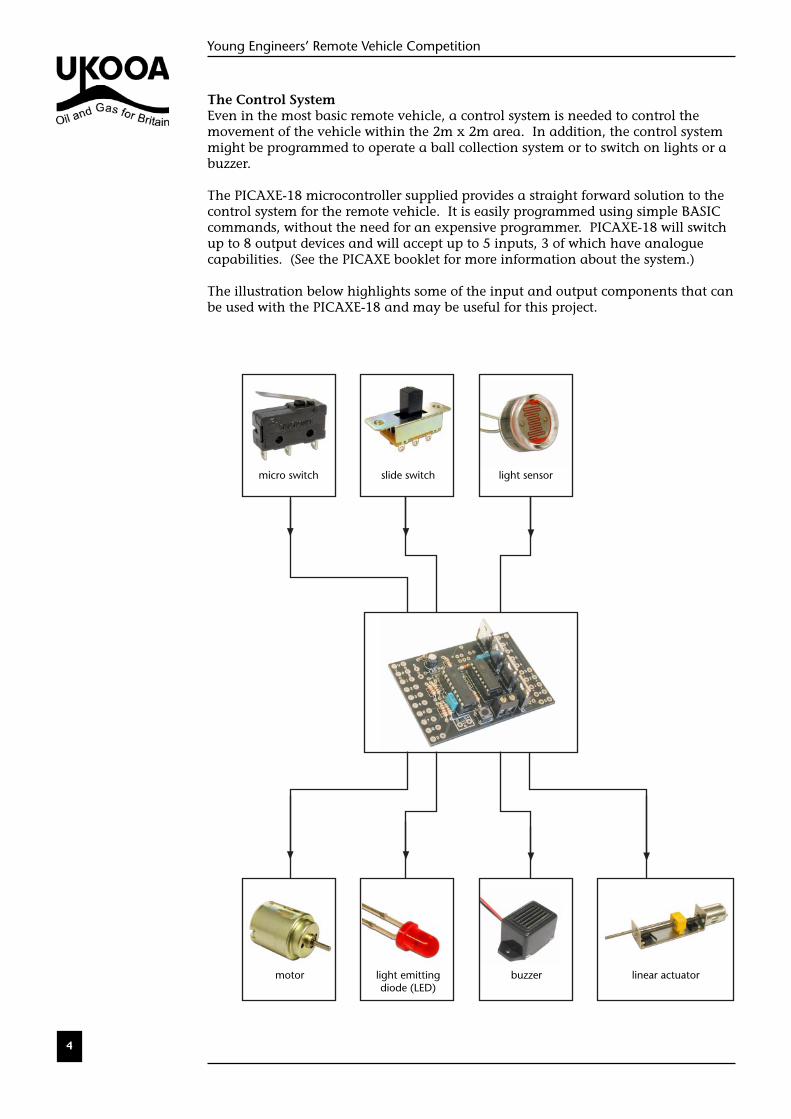
The Control SystemEven in the most basic remote vehicle, a control system is needed to control themovement of the vehicle within the 2m x 2m area. In addition, the control systemmight be programmed to operate a ball collection system or to switch on lights or abuzzer.
The PICAXE-18 microcontroller supplied provides a straight forward solution to thecontrol system for the remote vehicle. It is easily programmed using simple BASICcommands, without the need for an expensive programmer. PICAXE-18 will switchup to 8 output devices and will accept up to 5 inputs, 3 of which have analoguecapabilities. (See the PICAXE booklet for more information about the system.)
The illustration below highlights some of the input and output components that canbe used with the PICAXE-18 and may be useful for this project.
micro switch slide switch light sensor
motor light emittingdiode (LED)
buzzer linear actuator
5
Young Engineers’ Remote Vehicle Competition
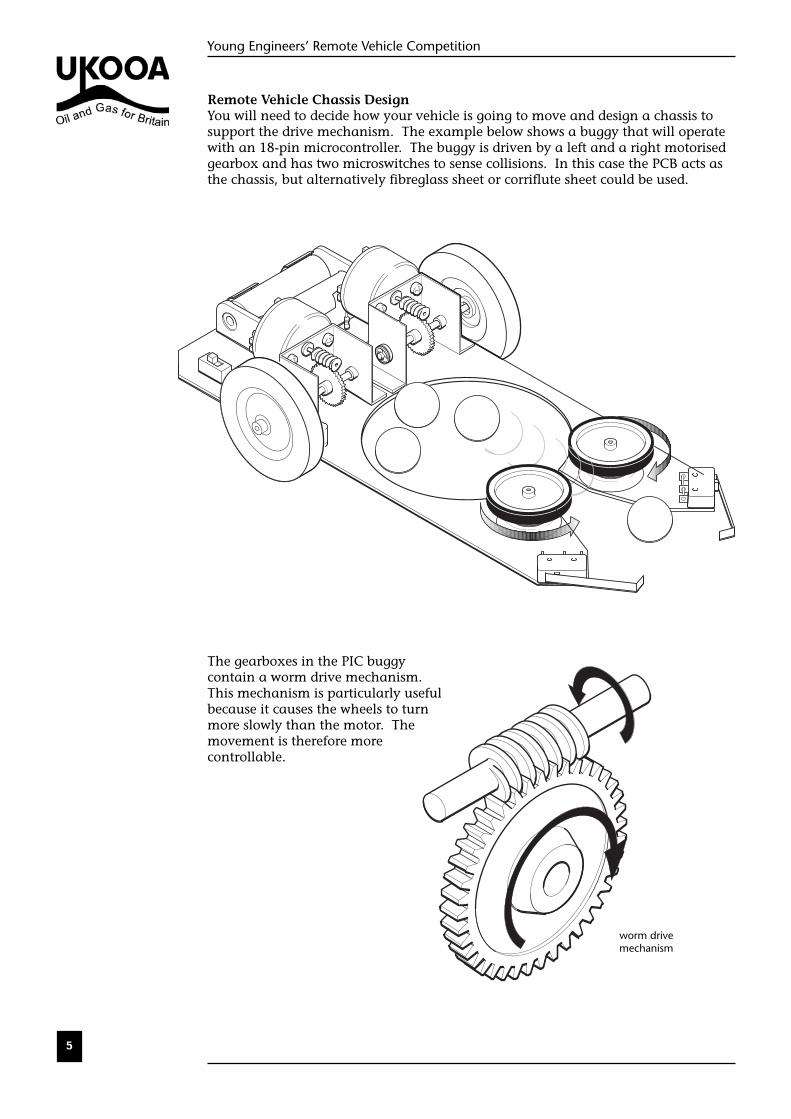
Remote Vehicle Chassis DesignYou will need to decide how your vehicle is going to move and design a chassis tosupport the drive mechanism. The example below shows a buggy that will operatewith an 18-pin microcontroller. The buggy is driven by a left and a right motorisedgearbox and has two microswitches to sense collisions. In this case the PCB acts asthe chassis, but alternatively fibreglass sheet or corriflute sheet could be used.
The gearboxes in the PIC buggycontain a worm drive mechanism.This mechanism is particularly usefulbecause it causes the wheels to turnmore slowly than the motor. Themovement is therefore morecontrollable.
worm drivemechanism
6
Young Engineers’ Remote Vehicle Competition
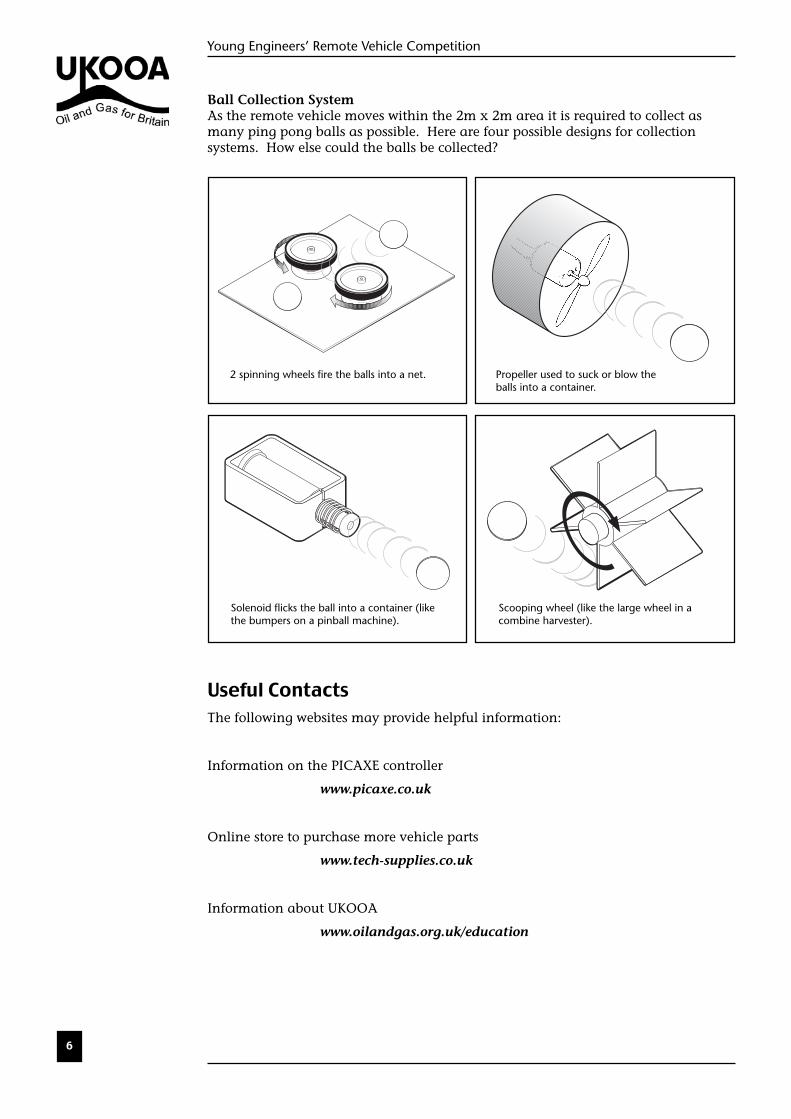
Ball Collection SystemAs the remote vehicle moves within the 2m x 2m area it is required to collect asmany ping pong balls as possible. Here are four possible designs for collectionsystems. How else could the balls be collected?
2 spinning wheels fire the balls into a net. Propeller used to suck or blow theballs into a container.
Solenoid flicks the ball into a container (likethe bumpers on a pinball machine).
Useful ContactsThe following websites may provide helpful information:
Information on the PICAXE controller
www.picaxe.co.uk
Online store to purchase more vehicle parts
www.tech-supplies.co.uk
Information about UKOOA
www.oilandgas.org.uk/education
Scooping wheel (like the large wheel in acombine harvester).
7
Young Engineers’ Remote Vehicle Competition
G V2+
red
black
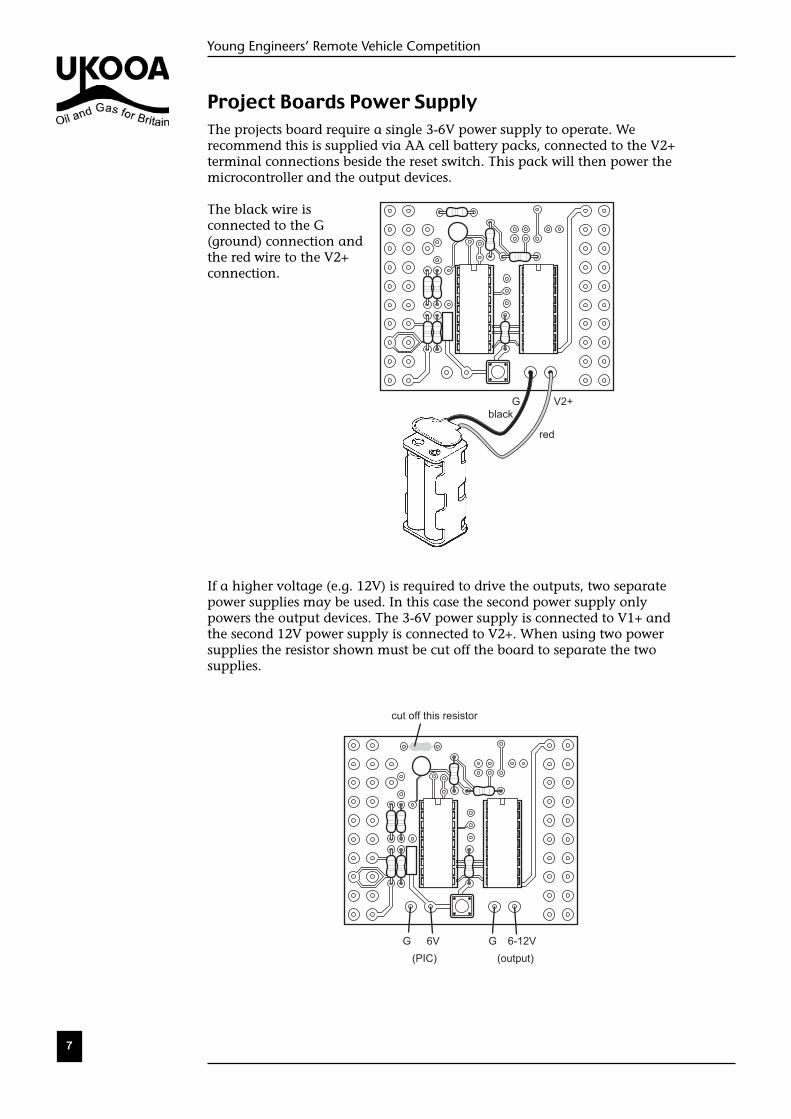
Project Boards Power SupplyThe projects board require a single 3-6V power supply to operate. Werecommend this is supplied via AA cell battery packs, connected to the V2+terminal connections beside the reset switch. This pack will then power themicrocontroller and the output devices.
The black wire isconnected to the G(ground) connection andthe red wire to the V2+connection.
If a higher voltage (e.g. 12V) is required to drive the outputs, two separatepower supplies may be used. In this case the second power supply onlypowers the output devices. The 3-6V power supply is connected to V1+ andthe second 12V power supply is connected to V2+. When using two powersupplies the resistor shown must be cut off the board to separate the twosupplies.
G 6V G 6-12V
cut off this resistor
(PIC) (output)
8
Young Engineers’ Remote Vehicle Competition
Output DevicesOutput devices are connected between the pairs of holes on the pcb (pinand V2+) as shown below.
Note that motors should be suppressed bysoldering a 220nF polyester capacitor across themotor terminals to prevent electrical noiseaffecting the circuit.
red
black
buzzer
motor
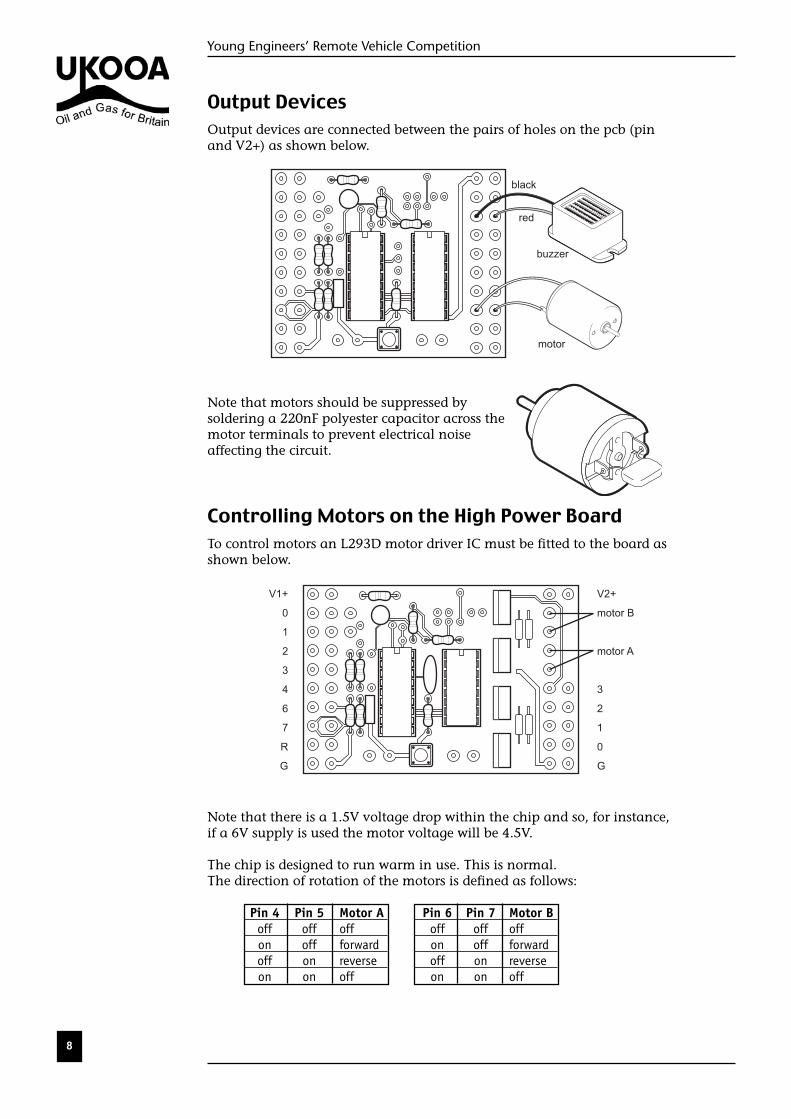
Controlling Motors on the High Power BoardTo control motors an L293D motor driver IC must be fitted to the board asshown below.
Note that there is a 1.5V voltage drop within the chip and so, for instance,if a 6V supply is used the motor voltage will be 4.5V.
The chip is designed to run warm in use. This is normal.The direction of rotation of the motors is defined as follows:
Pin 4 Pin 5 Motor A Pin 6 Pin 7 Motor Boff off off off off offon off forward on off forwardoff on reverse off on reverseon on off on on off
V2+
motor B
motor A
3
2
1
0
G
V1+
0
1
2
3
4
6
7
R
G
9
Young Engineers’ Remote Vehicle Competition
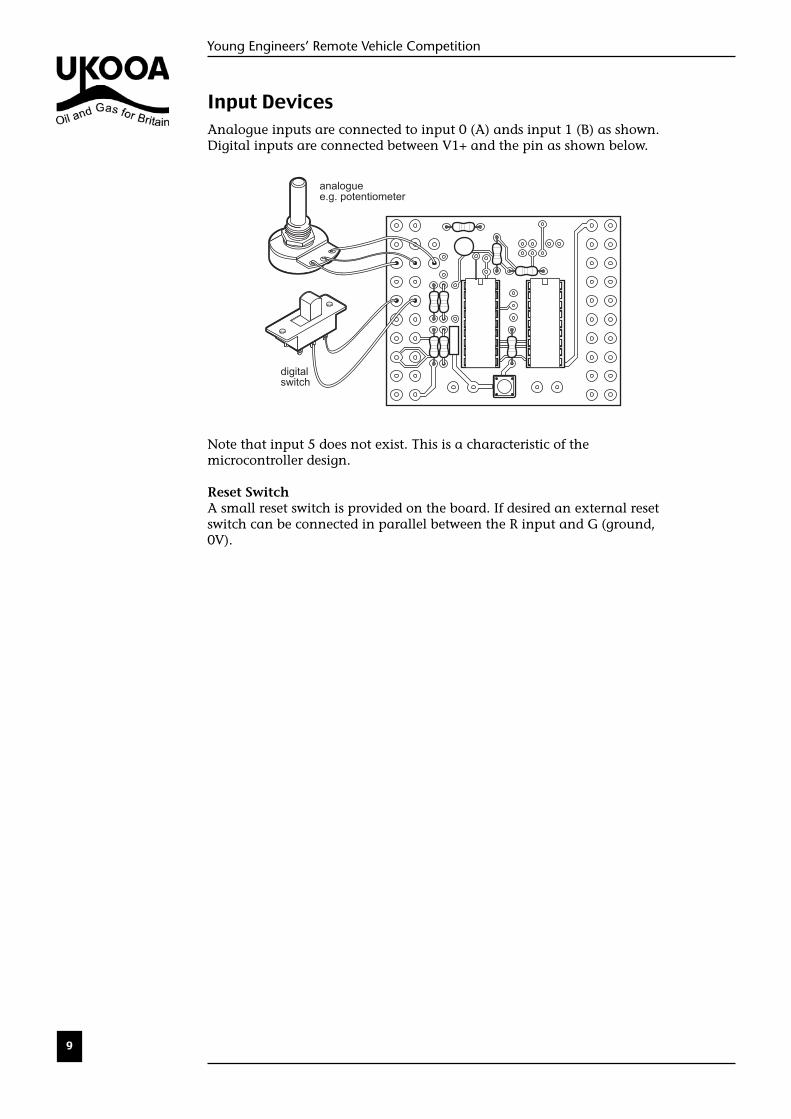
Input DevicesAnalogue inputs are connected to input 0 (A) ands input 1 (B) as shown.Digital inputs are connected between V1+ and the pin as shown below.
Note that input 5 does not exist. This is a characteristic of themicrocontroller design.
Reset SwitchA small reset switch is provided on the board. If desired an external resetswitch can be connected in parallel between the R input and G (ground,0V).
analoguee.g. potentiometer
digitalswitch
10
Young Engineers’ Remote Vehicle Competition
Appendix 1
Competition Rules
OverviewThe purpose of the competition is to construct a mobile vehicle that can collect themost table tennis balls within a square ‘playing field’ area within two minutes.
Rules1. The playing filed will be a square of size 2000mm by 2000mm. A solid wall
(minimum height 40mm) will mark the boundaries of the square.
2. Thirty balls will be randomly dropped into the playing field at the start of eachgame. Each vehicle will be allowed two minutes to collect balls. The vehicle thatcollects most balls after the two minute time is the winner of that round. If morethan one vehicle collects all thirty balls, the vehicle that collected the balls inthe fastest time will be the winner.
3. Dependant on number of entries on the competition day, each vehicle may beallocated 1, 2 or 3 attempts at the competition.
4. All collected table tennis balls must be contained within the vehicle, so thatthe vehicle is carrying the balls when it moves. Any balls not carried by thevehicle at the end of the time limit will not be counted.
5. The vehicle must be self contained. All power supplies (e.g. batteries) andcontrol systems must be carried on the vehicle.
6. The vehicle must use a PICAXE-18 microcontroller for control. No outsidecontrol devices (cables/infra-red/radio control etc.) are allowed. Thevehicle may use sensors and/or switches to detect the walls and balls.
7. If the vehicle becomes stuck, after 15 seconds of non-movement the vehicle maybe lifted once, turned 180 degrees and put back down in the same area of theplaying field. If the vehicle becomes stuck again, it may not be moved andonly balls currently carried on the vehicle will be counted.
8. The judges decision is final.
11
Young Engineers’ Remote Vehicle Competition
Appendix 2
PICAXE-18 Programming LanguageThe programming language used for the PICAXE-18 microcontroller is PBASIC. This is theprogramming language used within Standard, Intermediate and Higher grade Technological studiescourses. Full instructions on this programming language can be found within the CDROM (see theBASIC commands and PICAXE-18 instruction manuals) and also within Technological Studiesteaching materials.
Installing the Software.Place the CDROM in the computer (running Windows 95/98/ME/NT/2000) and open the fileindex.htm using your browser (e.g. Internet Explorer). Click on ’Install Programming editor’ toinstall the software, and also install the ‘Adobe Acrobat Reader’ to allow the manuals to be read.
Configuring the SoftwareRun the Programming Editor software. Use the View>Options menu to select ‘PICAXE-18’ mode,and the correct serial port for the download cable (COM1 or COM2).
Sample Program.The following program shows a control program for the model shown on page 5.
Connections:Left Movement Motor - Motor A (outputs 4 and 5)Right Movement Motor - Motor B (outputs 6 and 7)Left ‘Wheel Spinning’Motor - Output 2Right ‘Wheel Spinning Motor’ - Output 3Left Bumper Switch - Input 0Right Bumper Switch - Input 1
Sample Program:
‘start going forwards‘with spinning motors on
main:let pins = %01011100
‘now just wait until you bump into something
loop:if pin0 = 1 then leftif pin1 = 1 then rightgoto loop
‘left switch hit‘so reverse and turnleft:
let pins =%10100000pause 2000let pins =%10010000pause 1500goto main
‘right switch hit‘so reverse and turn other wayright:
let pins =%10100000pause 2000let pins =%01100000pause 1500
goto main
12
Young Engineers’ Remote Vehicle Competition
Appendix 3
Competition Pack Contents
Documentation
1 Competition Rules1 Programming Editor CDROM containing- Programming Editor software- PICAXE-18 Manual- BASIC Commands Manual- Interfacing Electronics Manual
Chassis Pack
1 fibreglass board1 lefthand gearbox1 righthand gearbox2 wheels2 rubber band tyres2 rubber feet (can be used as ‘coasters’ at front and rear)2 long arm microswitches1 bag nuts/bolts2 length of wire
Electronics Pack
1 PICAXE18 control board1 6V battery pack1 battery clip1 download cable1 length of ribbon cable
Expansion Pack
2 large wheels2 small yellow wheels (small hole for direct mount on motors)2 rubber band tyres2 propellers2 motors2 set of gears2 set of cams2 table tennis balls
FURTHER ITEMS OR REPLACEMENTS MAY BE PURCHASED FROM THE ONLINESTORE AT WWW.TECH-SUPPLIES.CO.UK
All items are available in the ‘Competition Resources’ section of the store.



























