-
I. NOMENCLATURE
Robust Control Design for Aerospace Ap p I icatio ns
RAMA K. YEDAVALLI, Senior Member, IEEE The Ohio State
Univelsity
The aspect of time domain control design for stability
robustness of linear systems with structured uncertainty is
addressed. Upper bounds on the linear perturbation of an
asymptotically stable linear system are obtaimd to maintain
stability by us@ the structural information of the uncertainty.
A quantitative measure called stability robustness index, is
introduced and this measure is used to design controllers
for
robust stability. The proposed state feedback control design
algorithm can be used for a given set of perturbatiom, to select
the range of control effort for which the system is stability
robust and conversely it can be used, for a given control
effort, to determine the range of the size of tolerable
perturbation. The
algorithm is illustrated with the help of exanples from
aircraft
control and large space structure control problems.
Manuscript received February 1, 1987.
IEEE Log No. 27570.
This work was supported in part by NASA Grant NAG-1-578 and by
United States Air Force Contract E33615-84-K-3606.
Authors address: Dept. of Aeronautical and Astronautical
Engineering, The Ohio State University, 330 CAE Bldg., 2036 Neil
Ave., Columbus, OH 43210.
0018-9251/89/0500-0314 $1.00 @ 1989 IEEE
RQ 4 Belongs to. A[.]
Real vector space of dimensions a.
Eigenvalues of the matrix [.I. _. 4 . 1 [.Is I(.)I
Singular value of the matrix [.I. Symmetric part of a matrix
[.I. Modulus of the entry (.).
{ A([~l[.lT>) l**
[.I,,, V For all.
Modulus matrix = matrix with modulus entries.
II. INTRODUCTION
The aspect of robust control design for linear systems subject
to parameter uncertainty has been an active topic of research in
recent years. The published literature on the robustness of linear
systems can be viewed mainly from two perspectives, namely: 1)
frequency domain analysis, and 2) time domain analysis. The main
direction of research in frequency domain has been to extend and
generalize the well-known classical, single input, single output
treatment to the case of multiple input, multiple output systems,
using the singular value decomposition [l, 21. In the case of
frequency domain results, the perturbations are mainly viewed in
terms of gain and phase changes [3, 41 and as such are more suited
to treat unstructured perturbations. The time domain treatment, on
the other hand, is more amenable to the consideration of structured
perturbations in the form of parameter variations and
nonlinearities. This paper treats the stability robustness analysis
and design from the time domain viewpoint.
One factor which clearly influences the analysis and design of
robust controllers is the characterization of perturbation.
Assuming the nominal system to be stable, the perturbations can be
viewed to take different forms like linear, nonlinear, time
invariant, time varying, structured, and unstructured. Structured
perturbations are those for which bounds on the individual elements
of the perturbation matrix are known (or derived) whereas
unstructured perturbations are those for which only a norm bound on
the perturbation matrix is known (or derived). We focus our
attention on linear structured (possibly time varying)
perturbations as affecting the nominal system.
Under this perspective, some researchers have presented analysis
and design procedures for tolerable perturbations for robust
stability. Kantor and Andres [5] present an algorithm to determine
tolerable perturbations in the frequency domain using M matrix
analysis. In the time domain, Horisberger and Belanger [6] present
an algorithm to determine an output feedback control gain that
yields the largest possible tolerable perturbation such that the
closed loop system is stable, but no explicit bounds are given.
Zheng
314 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL.
25, NO. 3 MAY 1989
-
[7] presents a procedure to find the stability regions as a
function of parameters but considers only time invariant
perturbations, and no synthesis procedure is given. Eslami and
Russell [SI also address the same problem, but no explicit bounds
are obtained. Chang and Peng [9], Patel and Toda [lo], Patel, Toda,
and Sridhar [ l l ] and Hinrichsen and Pritchard [12] give bounds
on the norm of the perturbation matrix (which amounts to the radius
of a sphere in the parameter space and thus can be categorized as
an unstructured perturbation case). Here the emphasis is on
utilizing the structure of the perturbation matrix and thus the aim
is to give bounds on the individual elements of the perturbation
matrix rather than on the norm of the matrix. This analysis, which
is at the elemental level, is termed structured uncertainty
analysis. Leitmann [13], Hollot and Barmish [15] and their
bibliographies discuss the role of the structure of the uncertainty
in the robust stabilization of uncertain systems using Lyapunov
theory but no explicit bounds on the elements are obtained.
Within this framework, the author has developed bounds on the
elemental perturbations (treating the variations as independent
variations) [16-201. The philosophy behind the design procedure
proposed here is to utilize these bounds in a design formulation
and give an algorithm to synthesize controllers for robust
stability. Towards this direction, a quantitative measure called
stability robustness index is introduced and based on this index a
design algorithm is presented by which one can pick a controller
that possesses good stability robustness property. The algorithm,
for a given size of perturbation, can be used to select the range
of control gain for which the system is stability robust or
alternatively, for a given control gain, can be used to determine
the range of the size of allowable perturbations for stability. Two
aircraft control examples [4, 211 are considered and constant gain
linear state and state estimate feedback control laws are presented
to attain stability robustness for given perturbations. Similarly,
the vibration suppression problem of a large space structure (US)
model with modal data uncertainty is considered [22] and the
various design implications based on this example are
discussed.
The paper is organized as follows. In Section I11 the results of
[16-201 are briefly reviewed. Section IV illustrates the
application of the proposed design to two aircraft control examples
and an LSS control example and discusses the different design
implications. Finally, Section V offers some concluding
remarks.
Ill. PERTURBATION BOUNDS FOR ROBUST STAB I L ITY
Briefly reviewed here are the upper bounds developed by the
author in [16-201 for linear uncertain
systems to maintain stability assuming structured
uncertainty.
Consider the following linear dynamical system
i ( t ) = A ( t ) ~ ( t ) = [A0 + E ( t ) ] ~ ( t ) (1) where ~
( t ) -+ R is the state vector, A0 is the n x n nominally stable
matrix and E( t ) is the error matrix, whose elements are such
that
A A E;j ( f ) < ~ ; j = IE;j(t)l and c =Max ~ ; j . (2)
1.1
Thus E is the magnitude of the maximum deviation expected in the
entries of Ao.
By taking advantage of the structural information of the nominal
as well as perturbation matrices, improved measures of stability
robustness are presented in [16-201 as follows.
The system of (1) is asymptotically stable if
or < ps (3b)
(3c)
(W
for all i , j = 1, ..., n where P satisfies APo + A,TP + 21, =
0
and A
Ue;j = ; j / (thus 0 5 U,;j 5 1).
It may be noted that U, can be formed even if one knows only the
ratio E ~ , / E instead of knowing E ; , (and E ) separately. One
suitable choice for the ratio is
ueij = i j / E = lAoi j I / IAoi j lmax
for all i, j for which
REMARK 1. maximum modulus deviations expected in the individual
elements of the nominal matrix Ao. If we denote the matrix A as the
matrix formed with c ; j , then clearly A is the majorant matrix of
the actual error matrix E ( t ) , where by majorant matrix we mean
the matrix with as its elements. In other words, it is the matrix
formed with the maximum modulus deviations, ci j . It may be noted
that U, is simply the matrix formed by normalizing the elements of
A (i.e., ~ i , ) with respect to the maximum of ~ ; j (i.e., E ) .
For example,
# 0. From (2), it is seen that cij are the
A = EU, (absolute variation). (4)
Thus 6;j here are the absolute variations in Ao;j.
Alternatively, one can express A in terms of percentage variations
with respect to the entries of Ao;j. Then one can write
A = 6Aom (relative (or percentage) variation) (5)
YEDAVI: ROBUST CONTROL DESIGN 315
-
where Aomij = JAoijI for all those i , j in which variation is
expected and Aomij = 0 for all those i , j in which there is no
variation expected and 6;j are the maximum relative variations with
respect to the nominal value of Aoij and 6 = Maxi,j6;j. Clearly,
one can then get a bound on 6 for robust stability as
0. 0.-
0. 0.
0. 0. I 0. 0. B = where P is the same as in (3).
Using the concept of state transformation, it has been shown in
[19] that it is possible to further improve the bounds on E. For
structured perturbation, it is possible to get higher bound even
with the use of a diagonal transformation. This result can be
stated as follows:
- M = diag[ml,mZ,.. ., m,]. (6)
The system matrices for the drone lateral attitude control
system considered in [4] are given by
I -0.0853 -0.0001 -0.9994 0.0414 O.oo00 0.1862 -46.8600 -2.7570
0.3896 O.oo00 -124.3OOO 128.6ooo -0.4248 -0.0622 -0.0671 O.oo00
-8.7920 -20.4600 I 0.000 1.oooO 0.0523 O.oo00 O.oo00 O.oo00 A = I
0.000 0 . m 0 . m 0 . m - 2 0 . m 0 . m 1 L 0.000 0 . m 0 . m 0 . m
0 . m -20.mJ
(sa)
L:: ::I The system of (1) is stable if With a linear state
feedback control gain
or
where
and
I -215.1000 4.6650 7.8950 233,u)oo -6.7080 2.5540 -231.5000
-3.7230 7.4530 -213.5000 2.5540 -6.8690 i j < ps ueij = p,+u C '
I .. (7a) G = [ m. maxi,j 12ueijI
(&>
the closed loop system matrix 2 = A + BG is made asymptotically
stable.
Now assuming the element A21 to be the uncertain parameter
(having a nominal value = -46.86) we get the stability robustness
bound on this parameter (using
< P: (7b)
the U, matrix as Ue21 = 1 and U,ij = Ofor all other (7c) i , j )
, as
~ 2 1 = 2.43. (9)
However, using the transformation - + + 21, = 0 and 0, is formed
(7d) M = diag[0.005 1 1 1 1 11 (10)
we get the bound on A21 as such that e . . i
ir,,, = -fl
where
p & = 573.46 (11)
which is clearly a significant improvement.
IV. TIME DOMAIN CONTROL DESIGN FOR ROBUST STABILITY
The foregoing discussion in Section I11 is basically and
E A . = ijmu; 2 0 = M-lAoM. (7e) concerned with the analysis of
stability robustness for linear systems. No effort was made to
synthesize a controller to achieve stability robustness. In this
section, we address this design aspect from a systematic
algorithmic point of view. The philosophy behind the proposed
procedure is to make use of the perturbation bounds developed in
the Previous
(Note that in general 0, # R- 'U,W) .
EXAMPLE 1. Application to the drone example /4]:
316 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL.
25, NO. 3 MAY 1989
-
section in a design formulation and give an algorithm to
synthesize controllers for robust stability. Towards this
direction, a quantitative measure called stability (relative
variation) (17) robustness index is introduced and based on this
index
Alternately, we can write
A A = 6,Am
AB = 6hB, a design algorithm is presented by which one can pick
a controller that possesses good stability robustness property. The
algorithm, for given size of perturbation can be used to select the
range of control gain for which the system is stability robust or
alternatively, for a given control gain, can be used to determine
the range of the size of allowable perturbations for stability. In
this attempt, we first consider the case of full state feedback
controllers and then investigate the use of state estimate feedback
controllers.
A. Linear State Feedback Control Design Using Perturbation Bound
Analysis
Consider the linear, time invariant system described by
X = A x + B u
y = cx where x is n x 1 state vector, the control U is m x 1 and
output y (the variables we wish to control) is k x 1. The matrix
triple (A, B, C) is assumed to be completely controllable and
observable. Let the control law be given by
U = Gx. (13)
Now let A A and AB be the perturbation matrices formed by the
maximum modulus deviations expected in the individual elements of
matrices A and B, respectively. Then one can write
A A = ,Uea (Absolute variation) (14)
AB = fbUeb
where E , is the maximum of all the elements in A A and q, is
the maximum of all elements in AB. Then the total perturbation in
the linear closed loop system matrix of (12) with nominal control U
= Gx is given by
A = A A + ABG, + eauca + bUcbGm. (15) Assuming the ratio
q,/& = F is known, we can
extend the main result of (3) to the linear state feedback
control system of (12), (13) and obtain the following results.
Result 1. The perturbed linear system is stable for all
perturbations bounded by E , and Eb if
and q, < 71-1 where P ( A + BG) + ( A + BG)TP + 21, = 0
(16b)
and ( A + BG) is an asymptotically stable matrix.
. . .
where Amij = IAijI and Bmij = IBijI for all those i, j in which
variation is expected and Amij = 0, Bmij = 0 for all those i, j in
which there is no variation expected. For this situation, assuming
6 b / 6 , = 6 is known, we get the following bound on 6, for robust
stability. Result 2. The perturbed linear system is stable for all
relative (or percentage) perturbations bounded by 6, and db if
and 66 < 61-1, where P satisfies (16b). Note that the above
expressions can be suitably
modified only if either A A or AB is present.
REMARK 2. If we suppose A A = 0, AB = 0 and expect some control
gain perturbations AG, where we can write
AG =egUeg (19a) then stability is assured if
(19b) 1
~max[PmBm Uegls = P g fg <
In this context, pg can be regarded as a gain margin.
B. Stability Robustness Index and Control Design A Igo r i t h
m
We now define, as a measure of stability robustness, an index
called stability robustness index ,& as follows.
Case a). Left-hand side (LHS) of (16) or (18) is known (i.e.,
checking stability for given perturbation range). For this case
(20a) A
b R = p - f a (or 1-11 - 6,).
Case b). LHS of (16) or (18) is not known (is., specifying the
bound). For this case
b R A 1 - 1 (or p r ) . (20b)
It is clear from the expressions for ,U in (16), the error
matrix in (15) and &R in (20) that these quantities depend on
the control gain G and as the gain G is varied / ~SR changes. In
order to plot the relationship between &R and the gain G , we
need a scalar quantitative measure of G . For this we can either
use
Jm = IlGlls = gmax(G) P a )
or 112 112
J,, = [ L m ( u T u ) d i ] = [ L m x T G T G x d t ] (21b)
YEDAVALLI: ROBUST CONTROL DESIGN 317
-
where J,, denotes a measure of nominal control effort. We use
(21b) here.
The variation of AR with the control effort J,, is very much
dependent on the perturbation matrices and on the behavior of the
Lyapunov solution, which cannot be described analytically in a
straightforward way. Assuming stability robustness is the only
design objective, the design algorithm basically consists of
picking a control gain that maximizes stability robustness ( /~SR)
. Specifically the algorithm involves determining the index / ~ S R
and the control effort J,, for different values of the control gain
G and plotting these curves. These design curves can then be used
to pick a gain that achieves a high ,&R. The algorithm thus
provides a simple constant gain state feedback control law that is
robust from a stability point of view.
The linear control gain G of (13) can, of course, be determined
in many different ways. In this section, we assume the control gain
G to be given by the standard linear quadratic regulator algorithm.
Accordingly, we determine G as
where K satisfies the Riccati equation.
R, K A + A T K - K B - B T K + G = O (22b)
P c
for a given symmetric positive semidefinite matrix a and Ro =
I,,,. Thus p, serves as the design variable.
In other words, in the proposed procedure, we determine the gain
by some nominal means and then investigate the robustness of the
closed loop system by checking if the gain makes the index ~ S R
positive for a given ea (or e b ) (Case a) situation) or by
determining / ~ S R = p for a given control gain (Case b)
situation).
C. State Feedback Control for a Vertical Takeoff and Landing
Aircraft
A widely used vertical takeoff and landing (VTOL) aircraft
control problem with varying flight conditions is considered and a
stability robust controller is synthesized using the proposed
methodology. This example illustrates the design methodology for
Case a) situation while the next application is given for Case b)
situation.
The linearized model of the VTOL aircraft in the vertical plane
is described by
i = ( A + AA)x + ( B + AB)u, ~ ( 0 ) = XO. (23)
control vector U -+ R2 are given by
x1 + horizontal velocity (knots)
x2 -+ vertical velocity (knots)
x3 -+ pitch rate (degreeheconds)
x4 -+ pitch angle (degrees)
u1 + collective pitch control
u2 + longitudinal cyclic pitch control.
Essentially, control is achieved by varying the angle of attack
with respect to air of the rotor blades. The collective control u1
is mainly used for controlling the motion of the aircraft
vertically up and down. Control u2 is basically used to control the
horizontal velocity of the helicopter.
In [21], the mathematical model is presented assuming the
nominal airspeed to be 135 knots. For this nominal case ( A A and
AB = 0) the matrices A and B are given by
I -0.0366 0.0271 0.01% -0.4555 0.0482 -1.01 0.0024 -4.0208
0.1002 0.3681 -0.707 1.4200 (24a) 0 0 1 0 A = [ r 0.4422
0.17611
3.5446 -7.5922 = i.49 1
We take the initial condition to be
~ ~ ( 0 ) = [ O S 0.15 0 -0.051. (244
As the airspeed changes significant changes take place in the
elements ~ 3 2 , UM, and b21. Let us consider, for illustration
purposes, the following range of variations in these
parameters.
Case 1.
0.3545 5 Z32 = 0.3681 5 0.3817 1.31 5 21% = 1.42 5 1.53 3.39 5
521 = 3.544 5 3.702
i.e.,
lAa32I = 0.0136; lAu%l = 0.11; [Ab211 = 0.157.
(25)
Case 2.
IA~321 = 0.041; lA~,l = 0.332; [Ab211 = 0.47.
(26)
Case 3.
IAa321 0.068, I A u ~ ~ = 0.553; lab211 = 0.78.
The components of the state vector x + R4 and the (27)
318 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL.
25, NO. 3 MAY 1989
-
1 I 1 I I I I
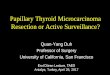
x u Fig. 1. Variation of AR with nomina1 control effort J,,(AA #
0,
AB # 0).
Case 4.
IAa32) = 0.1363; IAa341 = 1.106, JAb211 = 1.5674.
(29)
In other words, the matrices A A and A B are known for these
five cases.
For designing the nominal state feedback control that stabilizes
the nominal closed loop system, for this example, we employ the
standard Riccati equation
R,' K A + ATK - KB-BTK +e = 0 (30)
Pc
where Q and Ro are (n x n), and (m x m) symmetric positive
definite matrices and p c is a scalar variable used for designing
the control gain G .
For this case, the nominal closed loop system matrix is given
by
2 = A + BG, G = -R,'BTK/pc (31) and 2 is asymptotically stable.
For each case using
0.01 0
- - -
0 2 3 2 c M
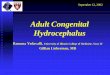
fig. 2. Variation of ,&R with nominal control effort J,,(AA
= 0, or AB = 0).
(1) From these plots, it may be observed that as the parameter
perturbation range is increased, the range of control effort for
stability robustness is decreased.
(2) For a given set of parameter perturbations, there is a
unique control effort for which AR is maximum. Obviously this is
the control effort (and the corresponding control gain) that we
seek, assuming practical constraints are satisfied.
(3) It is to be noted that for all these cases, the maximum AR
occurs almost at the same control effort. However, it is also to be
kept in mind that the range of variations considered in Cases 2
through 5 are simply some multiples of the range of Case 1.
Now let us consider the cases when parameter perturbation is in
only one of the matrices, A or B. Accordingly, we consider the
following ranges.
Case 6. lAa32l = 0.3018; IAU,~ = 1.300; lAb211 = 0.
Case 7. lAa32I = 0.1366; ~ A u M ~ = 0.106; lAb211 = 0. (32)
Case 8. IAa321 = 0; ~ A u M ~ = 0; 1Ab21) = 2.5671.
Case 9.
lAa32l = 0; ~ A u M ~ = 0; [Ab211 = 1.5674. Fig. 2 corresponds
to these cases. It may be
observed from these plots that, as before, it turns out that the
smaller the size of the perturbation, the more is the control
effort range. But consider Cases 6 and 9. From plots corresponding
to these two cases, it can be seen that the control range (for
stability) for perturbations in A is larger than the control range
for perturbations in B indicating that the variations in matrix B
are more critical from the stability robustness point of view.
REMARK 3. by (3a)-(3d) assume independent variations in each
and Ro = 12 and pc as design variables, the standard optimal LQ
regulator control gain and the corresponding control effort J,, of
(21b) are computed and / ~ S R is calculated. The plots of AR
versus Jcn for these five cases are shown in Fig. 1.
In interpreting these plots, it is to be recalled that the
region of control effort for stability robustness is the region in
which / ~ S R > 0.
It may be noted that the bounds given
YEDAVALLI: ROBUST CONTROL DESIGN 319
-
of the entries of the perturbation matrix and thus when applied
to an application where the perturbation matrix elements are
dependent on each other as in the case of the VTOL example, the
bounds may turn out to be somewhat conservative. Attempts are being
made to reduce the conservatism of the bounds by further exploiting
the dependency among the uncertain parameters in [24, 251.
D. Extension to Linear Stochastic Systems with State Estimate
Feedback
We now extend the above treatment to the case of linear
stochastic systems. Let us consider a continuous, linear, time
invariant system described by
f ( t ) = Ax(t) + Bu(t) + Dw(t), x(0) = xo (33a) Y ( t > =
Cx@> (33b) z( t ) = M x ( t ) + v( t ) (33c)
where the state vector x is n x 1, the control U is m x 1, the
external disturbance w is q x 1, the output y (the variables we
wish to control) is k x 1, and the measurement vector z is 1 x n.
The initial condition x ( 0 ) is assumed to be a zero-mean,
Gaussian random vector with variance XO, i.e.,
E[x(O)] = 0; E[x(0)xT(O)] = I,. (3%) Similarly, the process
noise w(t) and the measurement noise v(t) are assumed to zero-mean
white-noise processes with Gaussian distributions having constant
covariances, W and V, respectively, i.e.,
E[w(t)] = E[v(t)] = 0 (3%)
where pe is a scalar greater than zero and V = p e V o and d is
the dirac delta function and E is the expectation operator.
as a function of the measurements, where the state estimator has
the following structure
The state'x(t) of the stochastic system is estimated
i ( t ) = Ai?(t) + Bu(t) + G i ( t )
2 ( t ) = z ( t ) - M q t )
(Ma)
P b ) where
is called the measurement residual. For the minimum variance
requirement, the estimator of (34) is the standard Kalman
filter.
We also assume that the matrix pairs [A, B ] and [A, D] are
completely controllable, and the pairs [A, C] and [A,M] are
completely observable.
consider the control law given by For this case of a linear
stochastic system, we
(353) 1
Pc
= ~ i ? = - R ; ~ B T K ~
where
4 = A X + BU + &(z - M a ) , f(0) = 0 (35b) = (A + BG -
& ~ ) a + &Z (35c)
and P and K satisfy the algebraic matrix Riccati equations
R-
Pc K A + A ~ K - KBLB~K +Q = o (3%)
V-' BA= + AP - B M ~ L M B + D W D ~ = 0. (35f) Pe
The nominal closed loop system is given by
where 2, = A + BG - &M and the closed loop system matrix
(37)
is asymptotically stable. Letting AA, AB, AC, A M , and A D be
the
maximum modulus derivations in the system matrices A, B, C , M ,
and D, respectively, we can write the total error matrix of the
closed loop system as
and writing A A = caUea, AB = CbUeb, AM = c,Ue,, ..., etc. and
knowing the ratios ca/cb etc., one can get the stability robustness
condition in the same manner as the equations given by (16).
E. Application to the Drone Lateral Attitude Control Problem
The linearized model of the lateral attitude control problem of
a drone aircraft, with perturbations in the plant parameters is
given by
f = ( A + AA)x + Bu, ~ ( 0 ) = no. (39) The components of the
state vector x --$ R6 and the control vector U + R2 are given
by
X T = [P ,4 ,$ ,61 /20 ,~2 /20]
uT = [ u I u ~ ] , u1 = elevon command = 61, (40)
u2 = rudder command = 62.
320 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL.
25, NO. 3 MAY 1989
-
0 0
m
0 0 - 0 0
m
W 3
= 0
N
0
-
0 0
0
\
I 00 -1.00 0:OO 1 : O O 2 : O O 3 : O O 4 ; CO
1 OG I R Y O C I
Fig. 3. Variation of bound p with control weighting pc with full
state linear state feedback for drone example.
0 0
LQR ;h =0 -2.00 -1.00 0. 00 1.00 2.00 3.00
LOG ( R H O C I
Fig. 4. Variation of bound p with control weighting pc with
state estimate feedback for drone example.
The matrices A and B are given by (&)-(8b). We assume that
the parameters with nonzero
nominal values in the A matrix are subject to perturbations and
thus we take the Ue, matrix as Ueaii = IA;jI/IAijlmax. Accordingly,
the matrix U,, is given by
U,, =
0.0007 O.oo00 0.0078 0.0003 O.oo00 0.0014
0.3644 0.0214 0.0030 O.oo00 0.9666 Loo00
0.0033 0.0005 0.0005 O.oo00 0.0684 0.1591
0 . m 0 . m o.oo00 o.oo00 0 . m o.oo00
0 . m 0 . m 0 . m o.oo00 0.1555 o.oo00
O.oo00 O.oo00 O.oo00 O.oo00 O.oo00 0.1555
The linear state feedback control gain is determined using the
Riccati based equations of (35). For a given control gain (is.,
given pc), the bound
p is calculated. Since e, is not known, in this case the
stability robustness index ,&R is simply given by ~ S R = p.
The plot of p with the design variable pc is given in Fig. 3.
higher the control effort (lesser the pc), the higher is the
tolerable perturbation for robust stability.
We now extend the algorithm to the stochastic controller case
using
From the plot, it is seen that, for this problem, the
1 0 0 0 0 0 (42) I. w = 12; vo = 12; M = [ 0 0 0 1 0 0 The plot
of p versus p, with pe as a parameter and
the comparison with the pure state feedback case is given in
Fig. 4.
REMARK 4. p with state estimate feedback is lower than the one
with pure state feedback.
REMARK 5. For a given p,, the bound p is higher as the
measurement noise covariance is decreased, i.e., as p, is
decreased. This appears to be reasonable, because this means that p
becomes higher with better or more accurate measurements.
From this plot, it is seen that the bound
F. Robust Linear State Feedback Control for Large Space
Structures
In this section we apply the robust control design methodology
presented in the previous section to modal systems (which arise in
large space structure (LSS) control problems). We specifically
consider the LSS model with vibration suppression of the flexible
modes as the control objective. We seek a linear state feedback
control that achieves a reasonable tradeoff between the nominal
performance and stability robustness by accommodating the modal
uncertainty structure into the design procedure. Towards this
direction, the fact that the modal data uncertainty increases with
mode number is incorporated in the characterization of uncertainty
in LSS model parameters and this uncertainty structure is used to
obtain upper bounds for robust stability which are in turn used to
get a robust controller.
LSS Model and Nominal Control Design. the standard state space
description of an LSS evaluation model with n elastic modes:
Consider
f = AX + Bu, ~ ( 0 ) = XO, x + Rn=2N u + R m (43a)
~ = C X , y + R k (43b)
YEDAVALLI: ROBUST CONTROL DESIGN 321
-
where
A A = 6,
X T = [x;,x:,x; ,..., x;] ;
* I 0 0 282 282 0 0 383 3@3
A = block diag.[. . .Ai;. . .I,
xi = [ 51 (434
The performance index for vibration supression problems may be
written as
which can be written in the form
J = 1- [yTQy + pCuTu] dt [xTCTQCx + p,uTu] dt = J,, + pcJ,
= 1- ( a b ) where the matrix C of (43) is given by
C = block diag.[. . . Ci . . .] (453) and
ci = [; ;] Let the nominal control law be designed by minimizing
the performance index of (Ma) which results in
u = G x (&) where
The closed loop system matrix
Z = ( A + B G ) (47) is asymptotically stable. In the nominal
design situation, an appropriate value for pe (and hence G) is
determined such that a reasonable tradeoff between Jy and J, is
obtained. However, in U S models, the parameters of the plant
matrix A, namely the modal frequencies and modal damping, as well
as the parameters of the control distribution matrix B , namely the
mode shape slopes at actuator locations, are known to be uncertain.
It is also known that the uncertainty in these parameters tends to
increase with an increase in mode number. Thus with variations A A
and A B in the matrices A and B of (43), the
nominal control G of (46) cannot guarantee stability of the
closed loop system. Thus one needs to design a control gain G that
guarantees stability for a given range of perturbations A A and AB.
This is done using the design procedure given in the previous
section. In other words, the control design algorithm for robust
stability consists of picking a control gain (i.e., pc) that
achieves a positive AR (for Case a)) or a high value of AR (for
Case b)).
The design algorithm involves determining the index &R and
the costs J,, and J, for different values of the design parameter
pe andd plotting these curves. The algorithm thus provides a simple
constant gain state feedback control law (using the standard
optimal LQ regulator format) that is robust from the stability
point of view.
Next we present a specific characterization of uncertainty for
LSS models and use the above methodology to design a controller for
the Purdue model [23] of a two-dimensional US. Characterization of
Parameter Uncertainty in LSS Models and Application to the Purdue
Model. In U S models having the structure given by (43) the
uncertainty in the modal parameters such as modal frequencies
dampings and mode shape slopes at actuator locations tend to
increase with an increase in mode number. One way of modeling this
information in the uncertainty structure is given in the following
(specifically, we employ the relative variation format of (17))
1":i where 8i indicate the nominal entries corresponding to the
ith mode. We assume 6, = 6b which are not known.
With the above proposed uncertainty structure, we apply the
robust control design methodology of previous sections to the
Purdue model [23]. The model used consists of the first five
elastic modes. The numerical values of the model are given in [23].
To conserve space, the model is not reproduced here.
322 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL.
25, NO. 3 MAY 1989
-
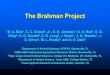
ROBUST CONTROL GAlN DETERMlNATION FOR LSS MOOEL .000251 , I . .
, , I , , , 7 I
BOUND VS CONTROL E F F O R T (Dh O;DB=O1 ,11030 , , , , , , , I
, ,
.00020
.00015-
r 0.0001 " " " " " "
0. .Ol .02 .03 .04 .05 .06 .07 .08 .09 .IO . I I .I2 CONTROL
EFFORT
Fig. 5. Variation of bound with control effort A A # 0, AB #
0.
W 3
1 -
BOUND V S CONTROL E F F O R T IDA=O.DE 01 I . 0 , , , . , . , ,
, ,
O,gl U. 8 0.6 O . ' t
CONTROL EFFORT
Fig. 6. Variation of bound with control effort for U S Model ( A
A = 0, AB # 0).
Since 6, (and 6 b ) are not known, the present design
corresponds to Case b) in which case we pick a control gain that
gives high ,&R = p r . The plot of p r versus pc is given in
Fig. 5. The robust control gain is the gain corresponding to pe =
0.12.
Figs. 6 and 7 present the variation of p, with control effort
(i.e., pc) assuming A A = 0 and AB = 0, respectively. From these
plots it can be concluded that the control effort range available
for guaranteed stability for mode shape ( A A = 0, AB # 0)
variation is limited in comparison to the range available for modal
frequency variation. Thus mode shape (slopes at actuator location)
variations are more critical from a control point of view than
modal frequency variations.
V. CONCLUSIONS
The main theme of the paper has been to analyze and synthesize
controllers for robust stability for linear time invariant systems
subject to linear time varying structured (elemental)
perturbations. First the analysis of robustness is considered. Then
the aspect of control design is addressed. In this regard, first
the case of linear state feedback control is considered. The
linear
,0000' ' ' ' ' ' ' ' ' ' ' 0.0 20. 40. 60. 80. 100. 120. 140.
160. 180. 200
CONTROL EFFORT
Fig. 7. Variation of bound with control effort for U S model (AA
# 0, AB = 0).
state feedback control is determined by nominal means based on
the Riccati equation and the bounds achieved by this control law
are computed. The effect of state estimation in the control law
(for stochastic systems) on the bounds is illustrated by comparing
it with the pure state feedback case. Finally the special nature of
"modal systems" (as in the LSS control example) is incorporated in
the uncertainty structure and a linear state feedback control
utilizing this special structure is developed. Thus the utility of
perturbation bound analysis in synthesizing useful controllers for
different aerospace applications is established. More research is
underway to incorporate both stability robustness as well as
performance robustness into the design procedure.
REFERENCES
[I1 (1981)
PI (1982)
IEEE Tronsactwm on Automatic Control, (special issue on linear
multi-variable control systems), AC-26, (Feb. 1981).
Proceedings IEE, Part D on Control Theory (special issue on
sensitivity and robustness), 1982.
A multi-loop system stability margin study using matrix singular
values. Jownal of Guidance, Control and Dynamics, I (Sept.-Oct.
lW), 582-587.
A multi-loop robust controller design study using singular value
gradients. Jownal of Guidnnce, Control and Dynamics, 8, 4
[3] Mukhopadhyay, V., and Newsom, J. R. (1984)
[4] Newsom, J. R., and Mukhopadhyay, V. (1985)
(July-Aug. 1985), 514-519. [5] Kantor, J. C., and Andres, R. I?
(1983)
Characterization of allowable perturbations for robust
stability. IEEE Zansactbm on Aufomatic Control, AC-28, 1 (Jan.
1983), 107-109.
[6] Horisberger, H. P., and Belanger, P. R. (1976) Regulators
for linear time invariant plants with uncertain parameters. IEEE
Transactions on Automatic Control, AC-21, 5 (Oct. 1976),
705-708.
323 YEDAVALLI: ROBUST CONTROL DESIGN
-
Zheng, D. Z (1984) A method for determining the parameter
stability regions of linear control systems. IEEE Pansactions on
Automatic Control, AC-29, 2 (Feb. 1984), 183-185.
On stability with large parameter variations stemming from the
direct method of Lyapunov. IEEE Pansactwns on Automatic Control,
AC-25, 6 (Dec.
Eslami, M., and Russell, D. L. (1980)
1980), 1231-1234, Chang, S. S. L., and Peng, T K. C. (1972)
Adaptive guaranteed cost control of systems with uncertain
parameters. IEEE Pansactwns on Automatic Control, AC-17 (Aug.
1972), 474-483.
Quantitative measures of robustness for multivariable systems.
In Proceedings of the Joint Automatic Control Conference,
Patel, R. V., and Toda, M. (1980)
1980, p. TP8-A. Patel, R. V., lads, M., and Sridhar, B.
(1977)
Robustness of linear quadratic state feedback designs in the
presence of system uncertainty. IEEE Transactwns on Automatic
Control, AC-22 (Dec. l977), 945-949.
Hinrichsen, D., and Pritchard, A. J. (1986) Stability radius of
linear systems. Systems and Control Letters, 7 (1986), 1-10.
Guaranteed asymptotic stability for some linear systems with
bounded uncertainties. ASME Joumal of qtnamic Systems, Measurement
and Control, 101, 3 (1979), 212-216.
On ultimate boundedness control of uncertain systems in the
absence of matching assumptions IEEE Pans., AC-27 (Feb. 1982),
153-158.
Hollot, C. V., and Barmish, B. R. (1980) Optimal quadratic
stabilkability of uncertain linear systems. In Proceedings of the
18th Alerton Conference on Communication, Control and Computing,
1980,697-706.
Yedavalli, R. K., Banda, S. S., and Ridgely, D. B. (1985) Time
domain stability robustness measures for linear regulartors.
Leitmann, G. (1979)
Barmish, B. R., and Leitmann, G.
A M Joumal of Guidmtce, Control and Dynamics, (JUly-AUg. 1985),
520-525.
Yedavalli, R. K. (1985) Improved measures of
stability-robustness for linear state space models. IEEE
Transactwns on Automatic Control, AC-30 (June 1985), 577-579.
Yedavalli, R. K. (1985) Perturbation bounds for robust stability
in linear state space models. International Journal of Control, 42,
6 (1985), 1507-1517.
Reduced conservation in stability robustness bounds by state
transformation. IEEE Pansactwns on Automatic Control, AC-31
(Sept.
Yedavalli, R. K., and Liang, Z (1986)
1986), 863-846. Yedavalli, R. K. (1985)
Time domain control design for robust stability of linear
regulators: application to aircraft control. In Proceedngs of the
1985 American Control Conference, Bmton, Mass., June 1985,
914-919.
Identification and optimization of aircraft dynamics. Journal of
Aircraft, 10, 4 (Apr. 1973), 193-199.
Robust control design for the vibration suppression of large
space structures. Presented at the 1986 Vibration Damping Workshop
11, Mar. 5-7, 1986, Las Vegas, Nev.
Generic model of a large flexible space structure for control
concept evaluation. Journal of Guidance and Control, 4, 5
(Sept.-Oct. 198l),
Narendra, K., and lipathi, S. (1973)
Yedavalli, R. K. (1986)
Hablani, H. (1981)
55a56i. Zhou, K., and Khargonekar, P. (1987)
Stability robustness bounds for linear state space models with
structured uncertainty. IEEE Pansactions on Automatic Control,
AC-32 (July 1987), 621423.
Yedavalli, R. K. (1988) Stability robustness measures under
dependent uncertainty. Proceedings of the 1988 American Control
Conference, Atlanta, GA, June 1988, 8204323.
Rama K. Yedavalli (M7MM86) received his B.S. and M.S. degrees
from the Indian Institute of Science, Bangalore, India, and the
Ph.D. degree from Purdue University, Lafayette, Ind., in 1981.
He was an Assistant Professor at the Stevens Institute of
Technology from 1981 to 1985 and an Associate Professor at the
University of Toledo, Ohio, from 1985 to 1987. In September 1987,
he joined the Department of Aeronautical and Astronautical
Engineering at The Ohio State University, Columbus, Ohio, where he
is currently an Associate Professor. Dr. Yedavallis research
interests include robustness and sensitivity issues in linear
uncertain dynamical systems, model reduction, dynamics and control
of flexible structures with applications to aircraft, spacecraft,
and robotics control.
Dr. Yedavalli is a senior member of IEEE and a member of AIAA,
Sigma Xi, and an associate member of ASME. He serves as a reviewer
for many journals, conferences, and the National Science
Foundation. He organized and chaired and co-chaired sessions in
conferences such as CDC, ACC and AIAA GNC. He is a member of the
IFAC Working Group on Robust Control and a member of the IEEE
Working Group on Linear Multivariable Systems. He was a consultant
to the Lawrence Livermore National Laboratory for two years.
324 I EEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL.
25, NO. 3 MAY 1989




![THE RAILWAYS ACT, 1989 NO. 24 OF 1989 BE it …rct.indianrail.gov.in/railway_act_1989.pdfTHE RAILWAYS ACT, 1989 NO. 24 OF 1989 [3rd June, 1989.] An Act to consolidate and amend the](https://img.pdfslide.us/doc/110x75/5c7ed13909d3f2aa3f8bb7dd/the-railways-act-1989-no-24-of-1989-be-it-rct-railways-act-1989-no-24-of-1989.jpg)