Embed Size (px)
Citation preview

LITERATURE NO. KAE-S800-39.10B
JQA-0386,-0422
Certified byISO9001
LINEAR SERVO DRIVE
Σ SERIESLINEAR SERVOMOTOR TYPE
SERVO DRIVER(SERVOPACK)TYPE
CORELESS GW:SGLGWIRON-CORE FW:SGLFWIRON-CORE TW:SGLTW :SGDH
Linear
YASKAWA

Direct drive linear servomotors for faster machine cycles.Direct drive linear servomotors for faster machine cycles.New speed records are achieved atmargins as slim as 1/100 of a second.A finely tuned machine such as a competitionsled can reach its peak speeds only when thedriver's steering, weight shifting and other criticalmotion tasks are optimized during the trials.
Yaskawa Electric continuously challenges the performancebarrier with the Linear Σ Direct Drive Servomotor products toimprove the speeds and accuracies of your machines.Backed by the company's rich technological expertise inthe advanced rotary servo drive products, the LinearΣ Direct Drive Servomotors will take your machine performanceto the next level into the new Millennium.
The Yaskawa Linear Σ Direct Drive Servomotors are in use to improvethe reliability, speed and accuracy performance in semiconductor / LCDpanel production machinery, SMD placement systems as well as virtuallyall types of general automation applications.
Yaskawa Electric continuously challenges the performancebarrier with the Linear Σ Direct Drive Servomotor products toimprove the speeds and accuracies of your machines.Backed by the company's rich technological expertise inthe advanced rotary servo drive products, the LinearΣ Direct Drive Servomotors will take your machine performanceto the next level into the new Millennium.
The Yaskawa Linear Σ Direct Drive Servomotors are in use to improvethe reliability, speed and accuracy performance in semiconductor / LCDpanel production machinery, SMD placement systems as well as virtuallyall types of general automation applications.
New speed records are achieved atmargins as slim as 1/100 of a second.A finely tuned machine such as a competitionsled can reach its peak speeds only when thedriver's steering, weight shifting and other criticalmotion tasks are optimized during the trials.
2

Performances
Constructions and Features
Range of Products
Model Designation
SGDH
Coreless GW
Iron-core FW
Iron-core TW
Iron-core FW
Iron-core TW
200V
400V
4
6
8
10
12
23
31
46
52
62
67
72
Page
Linear motors are quiet even at high speeds since the only contacting mechanisms in the linear motor system are the linear motion guides. The system reliability is increased and maintenance requirements are greatly reduced.
Since the moving member of the motor is rigid and is directly fixed to the load, the linear motion mechanism's stiffness is greatly improved. Multiples of the moving motor members can be operated independently over a single axis of the magnetic way, a variety of motion can be generated from a very compact drive system.
A linear motor is directly coupled to the load. This achieves high positioning accuracies and super wide operational speed ranges compared to other conventional drive/ translation mechanisms. An unlimited linear travel envelope can be obtained by coupling the stationary magnetic ways as needed.
Advantages of Applying Linear Servo Drives
Improved
Machine
Performance
SimplifiedMachineDesign &Construction
Ease ofOperation &High
Reliability
Outline
Linear Σ Direct Drive Servomotor Specifications
Σ-II Servodriver Specifications
Available Options & Motor Sizing Data
Ordering References
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
3
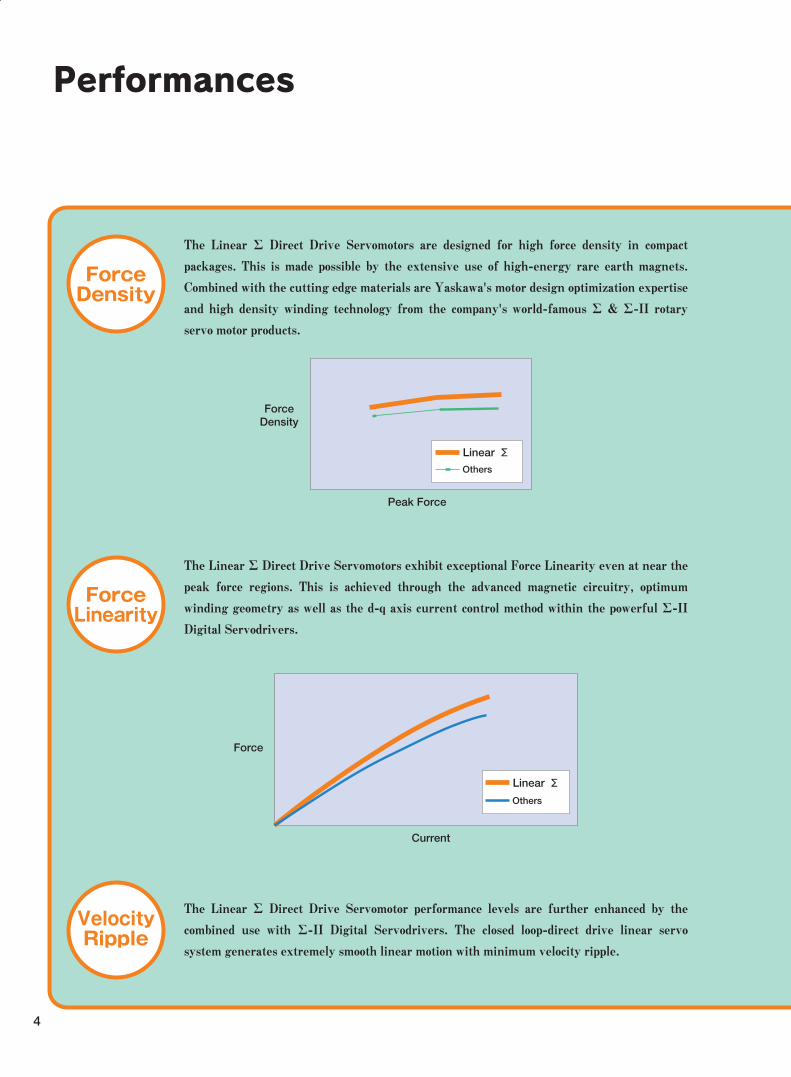
Force Density
The Linear Σ Direct Drive Servomotors are designed for high force density in compact
packages. This is made possible by the extensive use of high-energy rare earth magnets.
Combined with the cutting edge materials are Yaskawa's motor design optimization expertise
and high density winding technology from the company's world-famous Σ & Σ-II rotary
servo motor products.
Force Linearity
The Linear Σ Direct Drive Servomotors exhibit exceptional Force Linearity even at near the
peak force regions. This is achieved through the advanced magnetic circuitry, optimum
winding geometry as well as the d-q axis current control method within the powerful Σ-II
Digital Servodrivers.
Velocity Ripple
The Linear Σ Direct Drive Servomotor performance levels are further enhanced by the
combined use with Σ-II Digital Servodrivers. The closed loop-direct drive linear servo
system generates extremely smooth linear motion with minimum velocity ripple.
Force Density
Peak Force
Linear Σ Others
Current
Force
Linear Σ
Others
Performances
4

5
Speed
Acceleration
Settling Time
Magnetic Attraction Forces
High Efficiency
The Linear Σ Direct Drive Servomotors can reach speeds as high as 5 meters (196 inches)
per second. Since the direct drive linear motors do not suffer from the usual limitations of
the conventional mechanical drive systems, the operational speed ranges are not constrained
by factors such as the travel lengths of the linear motion systems.
The Linear Σ Direct Drive Servomotors can accelerate well beyond the capability of other
mechanical linear translation systems.
The Linear Σ motors themselves can reach astonishing 20Gs of maximum acceleration.
The Linear Σ Direct Drive Servomotors combined with the Σ-II Servodrivers can shorten
the system settling time after motion. The excellent dynamic stiffness of the Linear Σ
motors and one of the fastest servodriver in the industry can immediately improve your
machines' motion cycle specifications.
The Linear Σ Direct Drive Servomotors are extremely energy efficient. Due to its optimized
magnetic circuitry design and high-density windings inherited from the company's
legendary Σ Servomotors, the effects of motors' heat being transferred to the other areas of
your machine are minimized.
The Linear Σ Type GW motors are Coreless and there is no attraction force between the
motor members, and is of Zero-Cogging in nature.
The Linear Σ Type FW and TW motors are Iron-core type, and there are small to large
attraction forces, depending on the size of the motor, between the moving and the stationary
parts of the motors. These attraction forces can provide benefits in some systems by
providing the Preload Forces to the Linear Motion Guides, increasing the system rigidity.
Inversely, the attraction forces may negatively affect the mechanical design freedom since
the forces acting on the relative members of the motors must be properly supported by
increased bearing load capacities.
The Iron-core TW motors overcome this limitation in the Iron-core design by a patented
structure where the attraction forces are negated by its unique layout. The TW motors offer
the high force density and long linear bearing life in compact packages.
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK

The coreless GW linear motors are composed of "Coil Assemblies" and stationary "Magnetic Ways". ・ The coil assembly has no Iron content and is made of accurately resin molded motor windings.
・ The stationary magnetic way is made of two nickelized steel plates with accurately placed rare-earth magnets on each side. The steel plates are jointed at one end to form a "U-Channel" to provide a space for the coil assemblies.
The Iron-core FW linear motors are composed of "Coil Assemblies" with laminated iron-core and single sided stationary "Magnetic Ways". ・ The coil assembly of the FW linear motors are composed of laminated iron-core and pre-wound coil bobbins inserted into the slots located on the laminated iron-cores. The entire coil unit, after the precision assembly process, is permanently encapsulated in a thermally conductive resin body to give structural rigidity.
・ The magnetic way of the FW is made of a row of rare-earth magnets accurately placed on one side of the nickelized steel carrier plate. Stainless-steel magnet covers against minor accidental damages protect the magnets on the FW magnetic ways.
The Iron-core TW linear motors are composed of "Coil Assemblies" with laminated iron-core and a pair of stationary "Magnetic Ways" that are placed on each side of the moving coils. ・ The coil assembly of the TW linear motors are composed of laminated iron-core and pre-wound coil bobbins inserted into the slots located on the laminated iron-cores. The entire coil unit, after the precision assembly process, is permanently encapsulated in a thermally conductive resin body to give structural rigidity. ・ The magnetic way of the TW is made of a row of rare-earth magnets accurately placed on one side of the nickelized steel carrier plate. Two of the magnet carrier plates are used as a pair in a fashion similar to that of the Coreless type motors. Stainless-steel magnet covers against minor accidental damages protect the magnets on the TW magnetic ways.
N S N S N S N S
Coil WindingsMoving Member
Stationary Member
Laminated Iron-core
Magnets
N S N S N S N S
S N S N S N S N
Coil Windings
Magnets
Moving Member
Stationary Member
Stationary Member
S N S N S N S N
N S N S N S N S
Coil Windings
Laminated Iron-core
Magnets
Moving Member
Stationary Member
Stationary Member
Magnetic Way (Stationary Member)
Coil Assembly
(Moving Member)(Moving Member)
Coil Assembly
(Moving Member)
Magnetic Way (Stationary Member)
Coil Assembly
(Moving Member)(Moving Member)
Coil Assembly
(Moving Member)
Magnets
Laminated Iron-core
Magnets
Molded Resin
Magnetic Way (Stationary Member)
Magnets
Laminated Iron-core
Molded Resin
Coil Assembly (Moving Member)
Constructions and Features
Type: Coreless GW Construction
Type: Iron-core FW Construction
Type: Iron-core TW Construction
6

The coreless construction of the GW results in zero-attraction force, zero-cogging and no moment loads on linear motion bearings. The lack of attraction force helps to extend the life of linear motion guides, and the operational noise can be kept to a minimum. The velocity ripple is minimized due to zero-cogging nature of the coreless construction.
In order to obtain the maximum motor performance, and to avoid the relative contacting of the motor components, the air-gap between the coil assembly and the magnetic way must be maintained according to the specified dimensional tolerances.
●
●
●
The magnetic attraction force between the moving and stationary members can be used effectively to increase the rigidity of the linear guidance system by pre-loading the linear motion bearings. The magnetic pre-loading on certain types of compliant linear motion bearings can help increase the system's frequency response, improving its deceleration and settling performances. The compact profiles of the FW linear motors result in low profile linear positioning systems.
●
●
●
Yaskawa's unique construction principles of the TW linear motors negate the effects of magnetic attraction force between the relative motor members. This provides for the use of smaller linear motion bearing systems without major concerns in the linear motion bearing life. The linear motion bearing run quieter due to the lack of attraction force. The TW linear motors have very little cogging due to its optimized internal magnetic circuit design.
●
●
●
Avoid foreign materials to fall into the air-gap of linear motors. Employ general cautions regarding the environmental conditions.
The iron-core motors typically have the attraction forces that are 5~6 times that of motors' own peak forces (except for the TW linear motors). Therefore, it is extremely important to design rigid mechanical structure around the iron-core linear motors as well as taking extra care in selecting the linear motion bearings with sufficient load capacities. Since the linear motors are capable of very high terminal linear velocities, be sure to check for the maximum speed limitations on the linear motion bearings selected for the system.
When the linear motors are intended for use in vertical load orientation, well designed counter-balancing or mechanical braking mechanisms must be provided in order to avoid the load to free-fall when the motor is no longer "In-Servo" mode.
The moving motor coil and the linear encoder read-head should be placed as close as practically possible in order to obtain the best system accuracy. However, the effects of the heat generated by the motor must be taken into consideration. Excessive heat transfer from the motor coil to the linear encoder read-head will cause degradation of reliability as well as malfunction of the feedback system. The linear servomotor coils generate heat. The heat management consideration is critical in a linear motor based positioning systems design.
Coil Assembly
(Moving Member)
Coil Assembly
(Moving Member)
Features
Features
Features
Linear Σ Application Notes
Magnetic Attraction
Magnetic Attraction
Magnetic Attraction
Magnets
Type F Type T
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK
7

30A050B
30A080B
40A140B
60A140B
40A253B
40A365B
60A253B
60A365B
90A200A
90A370A
90A535A
40A140B
40A253B
40A365B
60A140B
60A253B
60A365B
20A090A
20A120A
35A120A
35A230A
50A200B
50A380B
1ZA200B
1ZA380B
A5AE
01AE
01AE
02AE
02AE
04AE
04AE
08AE-S
15AE-S
02AE
04AE
08AE-S
02AE
08AE-S
15AE-S
02AE
02AE
02AE
08AE-S
08AE-S
15AE-S
15AE-S
SGDH
Single-phase200VAC
Three-phase200VAC
Three-phase400VAC
30A050B
30A080B
40A140B
60A140B
40A253B
40A365B
60A253B
60A365B
90A200A
90A370A
90A535A
1000N 3000N2000N
1000N 3000N2000N
Rated Force
Peak Force
20A090A
20A120A
35A120A
35A230A
50A200B
50A380B
1ZA200B
1ZA380B
200V
Rated Force
Peak Force
40A140B
40A253B
40A365B
60A140B
60A253B
60A365B
500N 1000N
Rated Force
Peak Force
Range of Products
Linear Σ Servomotors
Coreless GW With Standard-force Magnetic Ways
Coreless GW With High-force Magnetic Ways
SIGMA-Ⅱ Servodrivers(SERVOPACK)
Iron-core FW
08AE
15AE
20AE
30AE
05AE
05AE
10AE
05AE
08AE
15AE
15AE
20AE
Note: If using a SERVOPACK for a single-phase power supply, vibration at stopping or a worsening of the speed ripple may occur if compared to a SERVOPACK of the same capacity for a three-phase power supply.
8

9
08AE-S
08AE-S
15AE-S
15AE-S
15AE-S
08AE-S
15AE-S
08AE-S
15AE-S
05AE
08AE
10AE
15AE
15AE
20AE
20AE
50AE
50AE
75AE
08AE
15AE
08AE
15AE
05DE
05DE
10DE
15DE
15DE
20DE
10DE
20DE
10DE
20DE
30DE
50DE
50DE
75DE
35D120A
35D230A
50D200B
50D380B
1ZD200B
1ZD380B
20A170A
35A170A
20A320A
20A460A
35A320A
35A460A
40A400B
40A600B
80A400B
80A600B
35A170H
35A320H
50A170H
50A320H
35D170H
35D320H
50D170H
50D320H
40D400B
40D600B
80D400B
80D600B
SGDH
Single-phase200VAC
Three-phase200VAC
Three-phase400VAC
Linear Σ Servomotors
SIGMA-Ⅱ Servodrivers(SERVOPACK)
1000N 3000N2000N
35D120A
35D230A
50D200B
50D380B
1ZD200B
1ZD380B
400V
200V
Rated Force
Peak Force
Iron-core FW
8000N4000N 6000N2000N
8000N4000N 6000N2000N
20A170A
35A170A
20A320A
20A460A
35A320A
35A460A
40A400B
40A600B
80A400B
80A600B
35A170H
35A320H
50A170H
50A320H
Rated Force
Peak Force
Iron-core TW
400V
35D170H
35D320H
50D170H
50D320H
40D400B
40D600B
80D400B
80D600B
Rated Force
Peak Force
Iron-core TWOutline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK

Model Designation
Linear Servomotor Model Designation
Coil Assembly
Magnetic Way
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
Linear Σ Series Linear servomotor
Length of coil assembly
40 A 140 A P
Servomotor Model
Code G F T
Specifications Coreless F-type iron core T-type iron core
Code
P
C
H
Specifications
With hall sensor
Forced cooling
Remarks
-
-
Air cooling SGLGW-40A, -60A, -90A
liquid coolingSGLTW-40A, -80A SGLTW-40D, -80D
With hall sensor and forced cooling
W : Coil assembly
Magnet height
WGSGL
Design revision orderA,B,C
D
・・・
SERVOPACK Model Designation
Model
Code G F T
Specifications Coreless F-type iron core T-type iron core
SGL 40 225 A C
Options
Code Specifications Applicable Model
With magnet cover
With base and magnet cover
Only for all Iron-core types ・SGLFM ・SGLTM
High thrust force Only for the following coreless types ・SGLGM-40, 60 Only for the T-type iron core types ・SGLTM-20, -35, -40, -80
Linear Σ Series Linear servomotor
M : Magnetic way
Magnet width
G M
Design revision order A,B,C
Length of magnetic way
- M
Y
C
・・・
Rated Output of Applicable Servomotor (kW)
Code
A5
01
02
04
05
08
Rated Output
0.05
0.10
0.20
0.40
0.45
0.75
Code
10
15
20
30
50
75
Rated Output
1.0
1.5
2.0
3.0
5.0
7.5
Model (Fixed)
Code
E
Remarks
・For force, speed, and position control
・Applicable for various application modules
Power Supply Voltage
Code
A
D
Voltage
Single/Three-phase, 200V
Three-phase, 400V
Mounting Method
Code SpecificationsRated Output of Applicable Servomotor (kW)
10SGDH A E
0.05 to 7.5
7.5
0.05 to 5.0
Base-mounted
Duct-ventilated
Rack-mounted
-
-P
-R
Cable Connector for Main Circuit Cable
Code
-
D
Specifications Applicable Model
All motor models
・SGLGW-30A, -40A, -60A ・SGLFW-35D, -50D, -1ZD ・SGLTW-35D□□□H, -50D□□□H
MS connector or connector made by Tyco Electronics AMP K.K.
Connector made by Interconnectron
Options
Note : The magnetic ways with base for SGLTW-35□□□□H, -50□□□□H are not available.
Voltage
・SGLFW-35D, -50D, -1ZD ・SGLTW-40D, -80D SGLTW-35D□□□H, -50D□□□H
Code Specifications
A
D
200VAC
400VAC
Remarks
- Applicable for the following
10
11
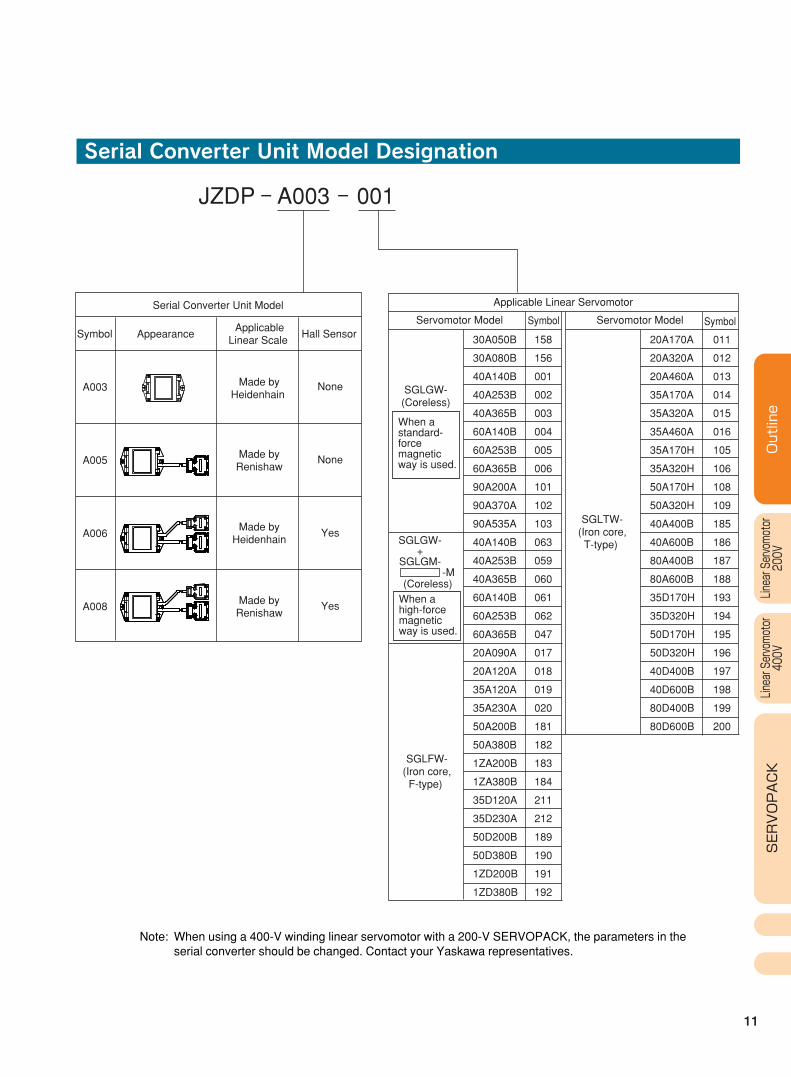
Serial Converter Unit Model Designation
Note: When using a 400-V winding linear servomotor with a 200-V SERVOPACK, the parameters in the serial converter should be changed. Contact your Yaskawa representatives.
A003
A005
A006
A008
A003JZDP 001
SGLGW- (Coreless)
30A050B
30A080B
40A140B
40A253B
40A365B
60A140B
60A253B
60A365B
90A200A
90A370A
90A535A
40A140B
40A253B
40A365B
60A140B
60A253B
60A365B
20A090A
20A120A
35A120A
35A230A
50A200B
50A380B
1ZA200B
1ZA380B
35D120A
35D230A
50D200B
50D380B
1ZD200B
1ZD380B
SGLFW- (Iron core, F-type)
158
156
001
002
003
004
005
006
101
102
103
063
059
060
061
062
047
017
018
019
020
181
182
183
184
211
212
189
190
191
192
011
012
013
014
015
016
105
106
108
109
185
186
187
188
193
194
195
196
197
198
199
200
20A170A
20A320A
20A460A
35A170A
35A320A
35A460A
35A170H
35A320H
50A170H
50A320H
40A400B
40A600B
80A400B
80A600B
35D170H
35D320H
50D170H
50D320H
40D400B
40D600B
80D400B
80D600B
-M
SGLGW- +
SGLGM-
Serial Converter Unit Model
Appearance Applicable Linear Scale Hall Sensor
None
None
Yes
Yes
Made by Heidenhain
Made by Heidenhain
Made by Renishaw
Made by Renishaw
Symbol
Applicable Linear Servomotor
Servomotor Model Symbol Servomotor Model Symbol
(Coreless)
SGLTW- (Iron core, T-type)
When a standard- force magnetic way is used.
When a high-force magnetic way is used.
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK
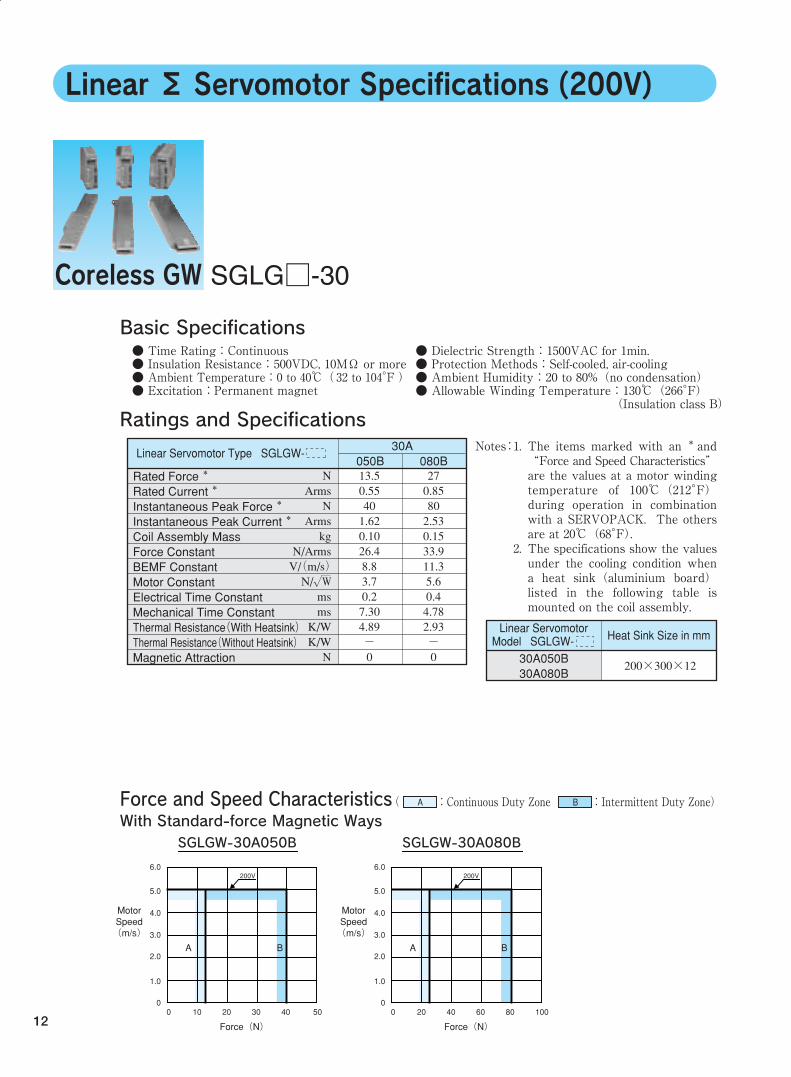
Linear Σ Servomotor Specifications (200V)
Ratings and Specifications
Linear Servomotor Type SGLGW- 050B
30A 080B
Linear Servomotor Model SGLGW- Heat Sink Size in mm
Force and Speed CharacteristicsWith Standard-force Magnetic Ways
( :Continuous Duty Zone :Intermittent Duty Zone)
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
Coreless GW
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled, air-cooling ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLG□-30
A B
200V 200V
Notes:1. 2.
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
13.5 0.55 40 1.62 0.10 26.4 8.8 3.7 0.2 7.30 4.89 - 0
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
27 0.85 80 2.53 0.15 33.9 11.3 5.6 0.4 4.78 2.93 - 0
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction
200×300×1230A050B 30A080B
SGLGW-30A050B
6.0
5.0
4.0
3.0
2.0
1.0
00 10 20 30 40 50
Motor Speed (m/s)
Force(N)
A B
SGLGW-30A080B
6.0
5.0
4.0
3.0
2.0
1.0
00 20 40 60 80 100
Motor Speed (m/s)
Force(N)
A B
12
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
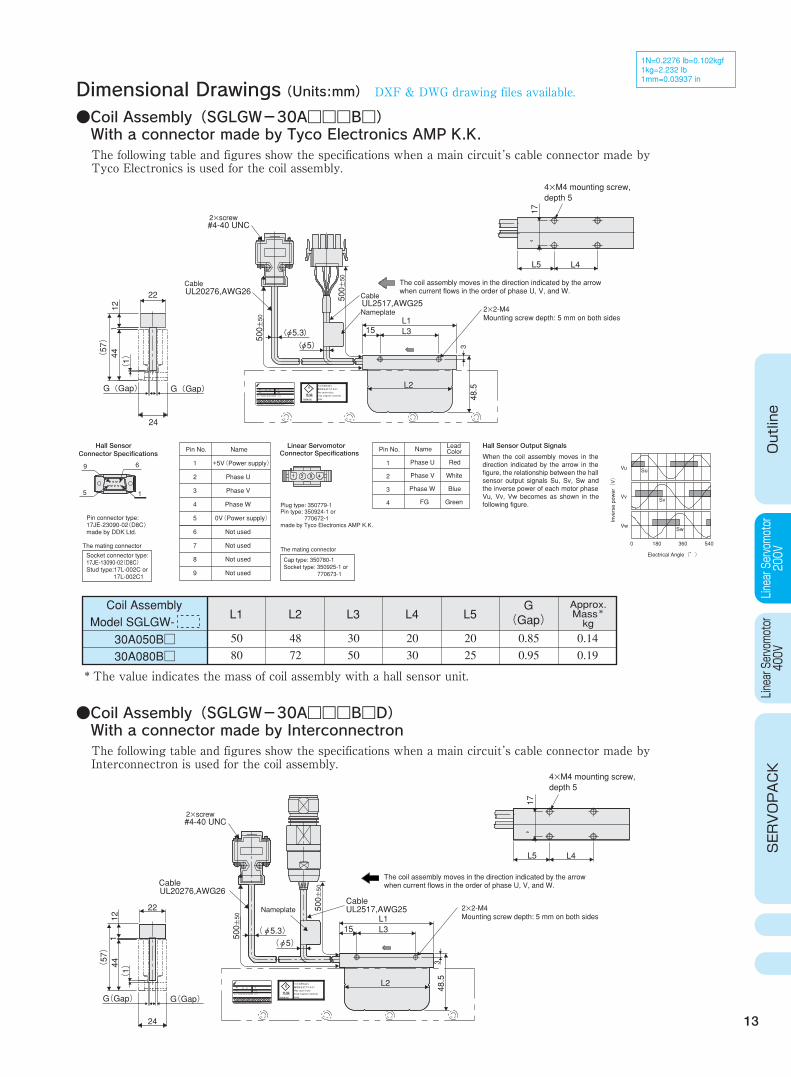
DXF & DWG drawing files available.Dimensional Drawings(Units:mm)●Coil Assembly(SGLGW-30A□□□B□)With a connector made by Tyco Electronics AMP K.K.The following table and figures show the specifications when a main circuit’s cable connector made by Tyco Electronics is used for the coil assembly.
* The value indicates the mass of coil assembly with a hall sensor unit.
Hall Sensor Connector Specifications
9 6
15
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type:17L-002C or 17L-002C1
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V(Power supply)
Phase U
Phase V
Phase W
0V(Power supply)
Not used
Not used
Not used
Not used
Linear ServomotorConnector Specifications
Plug type: 350779-1Pin type: 350924-1 or 770672-1made by Tyco Electronics AMP K.K.
The mating connector
Cap type: 350780-1 Socket type: 350925-1 or 770673-1
Hall Sensor Output Signals
Electrical Angle(°)
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
The coil assembly moves in the direction indicated by the arrowwhen current flows in the order of phase U, V, and W.
AWIns.
3
17
4×M4 mounting screw,depth 5
L5 L4
away.
May cause injury.Keep magnetic materials
YASKAWA ELECTRIC CORPORATION JAPAN
N
22
(57)
(1)
24
44
48.5
2×screw#4-40 UNC
φ5.3φ5
UL2517,AWG25
CableUL20276,AWG26
2×2-M4Mounting screw depth: 5 mm on both sides
15
500±50
500±50
L1L3
L2G GapG Gap
12 Cable
Nameplate
Pin No.
1
2
3
4
Name
Phase U
Phase V
Phase W
FG
Red
White
Blue
Green
Inverse power(V)
LeadColor
Coil Assembly Model SGLGW-
30A050B□ 30A080B□
L1
50 80
L2
48 72
L3
30 50
L4
20 30
L5
20 25
G (Gap)
Approx. Mass* kg
0.85 0.95
0.14 0.19
When the coil assembly moves in the direction indicated by the arrow in the figure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the following figure.
●Coil Assembly(SGLGW-30A□□□B□D)With a connector made by InterconnectronThe following table and figures show the specifications when a main circuit’s cable connector made by Interconnectron is used for the coil assembly.
AWIns.
3
17
L5 L4
away.
May cause injury.Keep magnetic materials
YASKAWA ELECTRIC CORPORATION JAPAN
N
22
(57)
(1)
24
441
48.5
(φ5.3) (φ5)
15
500±50
500±50
L1L3
L2
G(Gap) G(Gap)
12
CableUL2517,AWG25
The coil assembly moves in the direction indicated by the arrowwhen current flows in the order of phase U, V, and W.
4×M4 mounting screw,depth 5
2×screw#4-40 UNC
CableUL20276,AWG26
2×2-M4Mounting screw depth: 5 mm on both sides
Nameplate
13
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
* The value indicates the mass of coil assembly with a hall sensor unit.
Coil Assembly Model SGLGW- 30A050B□D 30A080B□D
L1
50 80
L2
48 72
L3
30 50
L4
20 30
L5
20 25
G (Gap)
Approx. Mass* kg
0.85 0.95
0.14 0.19
9 6
153
4
2
6
75
1 Extension: SROC06JMSCN169
Pin type: 021.421.1020made by Interconnectron
The mating connector Plug type: SPUC06KFSDN236Socket type: 020.030.1020
Hall Sensor Connector Specifications
Pin connector type:17JE-23090-02 (D8C)made by DDK Ltd.
The mating connectorSocket connector type:17JE-13090-02 (D8C)Stud type:17L-002C or 17L-002C1
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V(Power supply)
Phase U
Phase V
Phase W
0V(Power supply)
Not used
Not used
Not used
Not used
Linear ServomotorConnector Specifications Pin No.
1
2
3
4
5
6
7
Name
Phase U
Phase V
Phase W
Not used
Not used
FG
Not used
Red
White
Blue
Green/Yellow
Lead Color
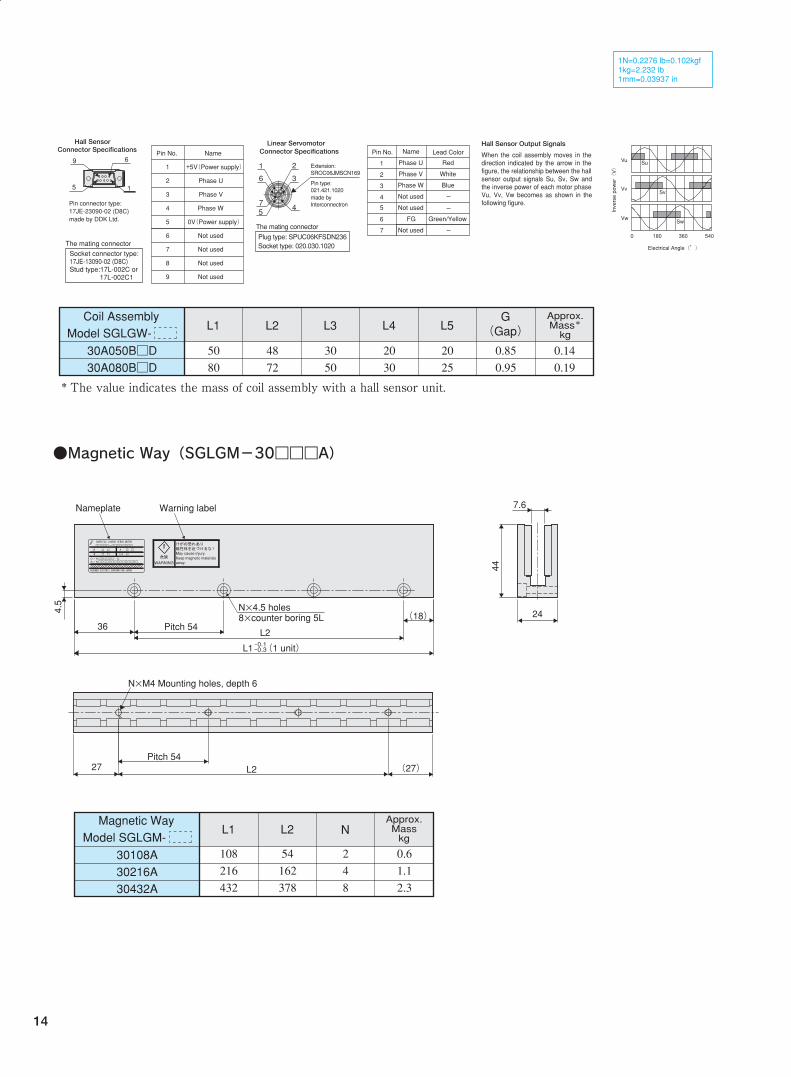
●Magnetic Way(SGLGM-30□□□A)
Magnetic Way Model SGLGM-
30108A 30216A 30432A
L1
108 216 432
L2
54 162 378
N
2 4 8
Approx. Mass kg
0.6 1.1 2.3
WARNING away.
May cause injury.Keep magnetic materials
Nameplate Warning label
4.5
Pitch 5427 (27)
447.6
36
N×M4 Mounting holes, depth 6
(18) 24
L1 (1 unit) 0.10.3
L2
L2
Pitch 54
N×4.5 holes 8×counter boring 5L
Hall Sensor Output Signals
When the coil assembly moves in the direction indicated by the arrow in the figure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the following figure.
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Inverse power(V)
Electrical Angle(°)
14

Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
Coreless GW SGLG□-40
Ratings and SpecificationsWith Standard-force Magnetic Ways
With High-force Magnetic Ways
Linear Servomotor Type SGLGW- 140B
40A 253B
365B
Linear Servomotor Type SGLGW- 140B
40A 253B
365B
Linear Servomotor Model SGLGW- Heat Sink Size in mm
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled, air-cooling ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
47 0.8 140 2.4 0.34 61.5 20.5 7.8 0.4 5.59 1.87 3.39 0
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
93 1.6 280 4.9 0.60 61.5 20.5 11.0 0.4 4.96 0.98 2.02 0
140 2.4 420 7.3 0.87 61.5 20.5 13.5 0.4 4.77 0.65 1.38 0
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction
57 0.8 230 3.2 0.34 76.0 25.3 9.6 0.4 3.69 1.87 3.39 0
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
114 1.6 460 6.5 0.60 76.0 25.3 13.6 0.4 3.24 0.98 2.02 0
171 2.4 690 9.7 0.87 76.0 25.3 16.7 0.4 3.12 0.65 1.38 0
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction
200×300×12300×400×12400×500×12
40A140B 40A253B 40A365B
Notes:1. 2.
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
15

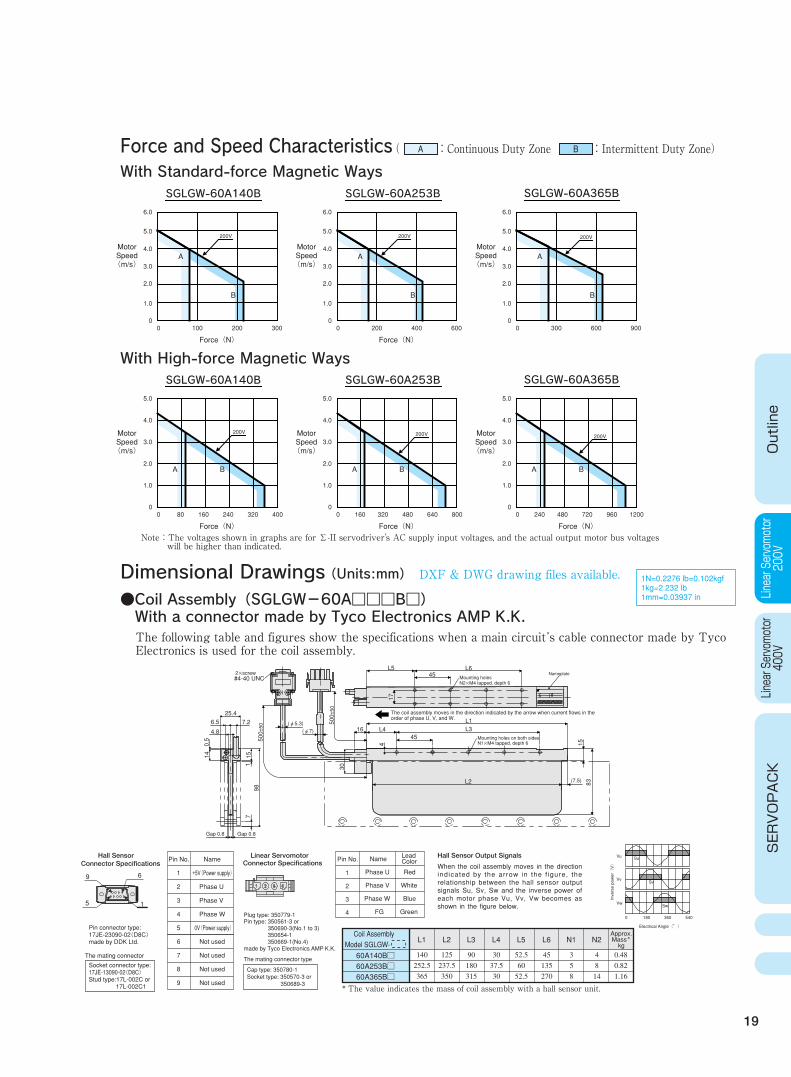
Note:The voltages shown in graphs are for Σ-II servodriver's AC supply input voltages, and the actual output motor bus voltages will be higher than indicated.
With Standard-force Magnetic Ways
With High-force Magnetic Ways
Force and Speed Characteristics
DXF & DWG drawing files available.
( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V 200V 200V
200V 200V 200V
SGLGW-40A140B SGLGW-40A253B SGLGW-40A365B6.0
5.0
4.0
3.0
2.0
1.0
00 50 100 150 200
Motor Speed (m/s)
Force(N)
A
B
6.0
5.0
4.0
3.0
2.0
1.0
00 100 200 300 400
Motor Speed (m/s)
Force(N)
A
B
6.0
5.0
4.0
3.0
2.0
1.0
00 150 300 450 600
Motor Speed (m/s)
Force(N)
A
B
SGLGW-40A140B SGLGW-40A253B SGLGW-40A365B
Motor Speed (m/s)
Force(N)
A B
5.0
4.0
3.0
2.0
1.0
00 50 100 150 200 250
Motor Speed (m/s)
Force(N)
A B
5.0
4.0
3.0
2.0
1.0
00 100 200 300 400 500
Motor Speed (m/s)
Force(N)
A B
5.0
4.0
3.0
2.0
1.0
00 150 300 450 600 750
Dimensional Drawings(Units:mm)●Coil Assembly(SGLGW-40A□□□B□)With a connector made by Tyco Electronics AMP K.K.The following table and figures show the specifications when a main circuit’s cable connector made by Tyco Electronics is used for the coil assembly.
Hall Sensor Connector Specifications
9 6
15
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type:17L-002C or 17L-002C1
Linear ServomotorConnector Specifications
Plug type: 350779-1Pin type: 350561-3 or 350690-3(No.1 to 3) 350654-1 350669-1(No.4)made by Tyco Electronics AMP K.K.
The mating connector
Cap type: 350780-1 Socket type: 350570-3 or 350689-3
Hall Sensor Output SignalsPin No.
1
2
3
4
Name
Phase U
Phase V
Phase W
FG
Red
White
Blue
Green
LeadColor
* The value indicates the mass of coil assembly with a hall sensor unit.
Coil Assembly Model SGLGW- 40A140B□ 40A253B□ 40A365B□
L1
140 252.5 365
L2
125 237.5 350
L3
90 180 315
L4
30 37.5 30
L5
52.5 60 52.5
L6
45 135 270
N1 N2
3 5 8
Approx. Mass* kg
4 8 14
0.40 0.66 0.93
When the coil assembly moves in the direction indicated by the arrow in the f igure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure above.
Electrical Angle(°)
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Inverse power(V)
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V(Power supply)
Phase U
Phase V
Phase W
0V(Power supply)
Not used
Not used
Not used
Not used
The coil assembly moves in the direction indicated by the arrow when current flows in the order of phase U, V, and W.
Nameplate2×screw
25.46.54.8
0.5
14
Gap 0.8 Gap 0.8
778
115
7.2
(φ5.3)(φ7)
30
16L1L3L4
L5 L6
L2
4
45
17
45
15
63
(7.5)
500±
50
500±
50
#4-40 UNC Mounting holes N2×M4 tapped, depth 6
Mounting holes on both sides N1×M4 tapped, depth 6
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
16

Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
Coil Assembly Model SGLGW-
L1
140 252.5 365
L2
125 237.5 350
L3
90 180 315
L4
30 37.5 30
L5
52.5 60 52.5
L6
45 135 270
N1 N2
3 5 8
Approx. Mass* kg
4 8 14
0.40 0.66 0.93
* The value indicates the mass of coil assembly with a hall sensor unit.
40A140B□D 40A253B□D 40A365B□D
Hall Sensor Output Signals
When the coil assembly moves in the direction indicated by the arrow in the f igure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below.
●Coil Assembly(SGLGW-40A□□□B□D)With a connector made by InterconnectronThe following table and figures show the specifications when a main circuit’s cable connector made by Interconnectron is used for the coil assembly.
9 6
153
4
2
6
75
1 Extension: SROC06JMSCN169
Pin type: 021.421.1020made by Interconnectron
The mating connector Plug type: SPUC06KFSDN236Socket type: 020.030.1020
Hall Sensor Connector Specifications
Pin connector type:17JE-23090-02 (D8C)made by DDK Ltd.
The mating connectorSocket connector type:17JE-13090-02 (D8C)Stud type:17L-002C or 17L-002C1
Linear ServomotorConnector Specifications
Pin No.
1
2
3
4
5
6
7
Name
Phase U
Phase V
Phase W
Not used
Not used
FG
Not used
Red
White
Blue
Green/Yellow
Lead ColorVu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Inverse power(V)
Electrical Angle(°)
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V(Power supply)
Phase U
Phase V
Phase W
0V(Power supply)
Not used
Not used
Not used
Not used
●Standard-force Magnetic Way(SGLGM-40□□□B)
Standard-force Magnetic Way Model SGLGM- 40090B 40225B 40360B 40405B 40450B
L1
90 225 360 405 450
L2
45 180 315 360 405
N
2 5 8 9 10
Approx. Mass kg
0.8 2.0 3.1 3.5 3.9
Nameplate Warning label
7
62
7.44-C1
22.5
22.5
N×φ5.5 mounting holes (per unit)
N×M5 mounting screws, depth 13
(22.5)
(22.5)
12.7
25.4
5.4
X-X
5.4
φ10
φ10
φ5.5
L2
L2
X
X Pitch 45
Pitch 45
L1 (1 unit) 0.10.3
High-force Magnetic Way Model SGLGM-
L1
90 225 360 405 450
L2
45 180 315 360 405
N
2 5 8 9 10
Approx. Mass kg
●High-force Magnetic Way(SGLGM-40□□□B-M)
40090B-M 40225B-M 40360B-M 40405B-M 40450B-M
1.0 2.6 4.1 4.6 5.1
Nameplate Warning label
7
62
7.44-C1
22.5
22.5
N×φ5.5 mounting holes (per unit)φ10 counter boring on both ends, depth 5.4L
N-M5 mounting screws, depth 13
31.8L2
L2
Pitch 45
Pitch 45
L1 (1 unit) 0.10.3
2×screw
25.46.54.8
0.5
14
Gap 0.8 Gap 0.8
778
115
7.2
#4-40 UNC
(φ5.3)(φ7)
30
16500±
50
500±
50
The coil assembly moves in the direction indicated by the arrow when current flows in the order of phase U, V, and W.
Nameplate
L1L3L4
L5 L6
4
45
17
45
15
63
(7.5)
Mounting holes N2×M4 tapped, depth 6
Mounting holes on both sides N1×M4 tapped, depth 6
L2
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
17

Coreless GW SGLG□-60
Ratings and Specifications
Linear Servomotor Type SGLGW- 140B
60A 253B
365B
Linear Servomotor Type SGLGW- 140B
60A 253B
365B
Linear Servomotor Model SGLGW- Heat Sink Size in mm
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled, air-cooling ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
73 1.2 220 3.5 0.42 66.6 22.2 11.1 0.5 3.41 1.62 2.69 0
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
147 2.3 440 7.0 0.76 66.6 22.2 15.7 0.5 3.08 0.80 1.54 0
220 3.5 660 10.5 1.10 66.6 22.2 19.2 0.5 2.98 0.53 1.20 0
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction
89 1.2 360 5.0 0.42 77.4 25.8 12.9 0.5 2.52 1.62 2.69 0
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
178 2.3 720 10.0 0.76 77.4 25.8 18.2 0.5 2.29 0.80 1.54 0
267 3.5 1080 14.9 1.10 77.4 25.8 22.3 0.5 2.21 0.53 1.20 0
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction
Notes:1. 2.
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
200×300×12300×400×12400×500×12
60A140B 60A253B 60A365B
With Standard-force Magnetic Ways
With High-force Magnetic Ways
18
19
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
With Standard-force Magnetic Ways
With High-force Magnetic Ways
Force and Speed Characteristics
DXF & DWG drawing files available.
Note:The voltages shown in graphs are for Σ-II servodriver's AC supply input voltages, and the actual output motor bus voltages will be higher than indicated.
( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V
200V
200V
200V
200V
200V
SGLGW-60A140B SGLGW-60A253B SGLGW-60A365B
6.0
5.0
4.0
3.0
2.0
1.0
00 100 300200
Motor Speed (m/s)
Force(N)
A
B
6.0
5.0
4.0
3.0
2.0
1.0
00 200 600400
Motor Speed (m/s)
Force(N)
A
B
6.0
5.0
4.0
3.0
2.0
1.0
00 300 900600
Motor Speed (m/s)
A
B
SGLGW-60A140B SGLGW-60A253B SGLGW-60A365B
Motor Speed (m/s)
Force(N)
A B
5.0
4.0
3.0
2.0
1.0
00 80 160 240 320 400
Motor Speed (m/s)
Force(N)
A B
5.0
4.0
3.0
2.0
1.0
00 160 320 480 640 800
Motor Speed (m/s)
Force(N)
A B
5.0
4.0
3.0
2.0
1.0
00 240 480 720 960 1200
Dimensional Drawings(Units:mm)●Coil Assembly(SGLGW-60A□□□B□)With a connector made by Tyco Electronics AMP K.K.The following table and figures show the specifications when a main circuit’s cable connector made by Tyco Electronics is used for the coil assembly.
Hall Sensor Connector Specifications
9 6
15
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type:17L-002C or 17L-002C1
Linear ServomotorConnector Specifications
Plug type: 350779-1Pin type: 350561-3 or 350690-3(No.1 to 3) 350654-1 350669-1(No.4)made by Tyco Electronics AMP K.K.
The mating connector type
Cap type: 350780-1 Socket type: 350570-3 or 350689-3
Hall Sensor Output SignalsPin No.
1
2
3
4
Name
Phase U
Phase V
Phase W
FG
Red
White
Blue
Green
LeadColor
When the coil assembly moves in the direction indicated by the arrow in the f igure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below.
Electrical Angle(°)
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Inverse power(V) Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V(Power supply)
Phase U
Phase V
Phase W
0V(Power supply)
Not used
Not used
Not used
Not used
0.48 0.82 1.16
* The value indicates the mass of coil assembly with a hall sensor unit.
Coil Assembly Model SGLGW-
L1
140 252.5 365
L2
125 237.5 350
L3
90 180 315
L4
30 37.5 30
L5
52.5 60 52.5
L6
45 135 270
N1 N2
3 5 8
Approx. Mass* kg
4 8 14
60A140B□ 60A253B□ 60A365B□
2×screw
25.46.5
4.8
0.5
14
Gap 0.8 Gap 0.8
798
115
7.2
#4-40 UNC
(φ5.3)(φ7)
30
16
500±
50
500±
50 The coil assembly moves in the direction indicated by the arrow when current flows in the order of phase U, V, and W. L1
L3
L2
L4
L5 L6
4
45
17
45
Mounting holes N2×M4 tapped, depth 6
Mounting holes on both sides N1×M4 tapped, depth 6
Nameplate
1583(7.5)
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in

1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
Hall Sensor Output Signals
When the coil assembly moves in the direction indicated by the arrow in the f igure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below.
●Coil Assembly(SGLGW-60A□□□B□D)With a connector made by InterconnectronThe following table and figures show the specifications when a main circuit’s cable connector made by Interconnectron is used for the coil assembly.
9 6
153
4
2
6
75
1 Extension: SROC06JMSCN169
Pin type: 021.421.1020made by Interconnectron
The mating connector Plug type: SPUC06KFSDN236Socket type: 020.030.1020
Hall Sensor Connector Specifications
Pin connector type:17JE-23090-02 (D8C)made by DDK Ltd.
The mating connectorSocket connector type:17JE-13090-02 (D8C)Stud type:17L-002C or 17L-002C1
Linear ServomotorConnector Specifications Pin No.
1
2
3
4
5
6
7
Name
Phase U
Phase V
Phase W
Not used
Not used
FG
Not used
Red
White
Blue
Green/Yellow
Lead Color Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Inverse power(V)
Electrical Angle(°)
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V(Power supply)
Phase U
Phase V
Phase W
0V(Power supply)
Not used
Not used
Not used
Not used
●Standard-force Magnetic Way(SGLGM-60□□□B)
Standard-force Magnetic Way Model SGLGM- 60090B 60225B 60360B 60405B 60450B
L1
90 225 360 405 450
L2
45 180 315 360 405
N
2 5 8 9 10
Approx. Mass kg
1.1 2.6 4.1 4.6 5.1
High-force Magnetic Way Model SGLGM-
L1
90 225 360 405 450
L2
45 180 315 360 405
N
2 5 8 9 10
Approx. Mass kg
●High-force Magnetic Way(SGLGM-60□□□B-M)
60090B-M 60225B-M 60360B-M 60405B-M 60450B-M
1.3 3.3 5.2 5.9 6.6
0.48 0.82 1.16
* The value indicates the mass of coil assembly with a hall sensor unit.
Coil Assembly Model SGLGW-
L1
140 252.5 365
L2
125 237.5 350
L3
90 180 315
L4
30 37.5 30
L5
52.5 60 52.5
L6
45 135 270
N1 N2
3 5 8
Approx. Mass* kg
4 8 14
60A140B□D 60A253B□D 60A365B□D
2×screw
25.46.5
4.8
0.5
14
Gap 0.8 Gap 0.8
798
115
7.2
#4-40 UNC
500±
50
(φ5.3)(φ7)
30
16
500±
50
The coil assembly moves in the direction indicated by the arrow in the order of phase U, V, and W.
Nameplate
L1L3L4
L5 L645
17
Mounting holes N2×M4 tapped, depth 6
L2
4
45
1583(7.5)
Mounting holes on both sides N1×M4 tapped, depth 6
Nameplate Warning label
7
22.5
22.5
N×φ5.5 mounting holes (per unit)
N×M5 mounting screws, depth 13
L2
L2
X
X Pitch 45
Pitch 45
L1 (1 unit) 0.10.3
82
7.44-C1
(22.5)
(22.5)
12.725.4
5.4
X-X5.4
φ10
φ10
φ5.5
L1 (1 unit) 0.10.3
Nameplate Warning label
7
22.5
22.5
N×φ5.5 mounting holes (per unit)on both sides, φ10 tapped, depth 5.4L
N-M5 mounting screws, depth 13
L2
L2
Pitch 45
Pitch 45
82
7.44-C1
31.8
20

21
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
Coreless GW SGLG□-90
Ratings and SpecificationsWith Standard-force Magnetic Ways
Linear Servomotor Type SGLGW- 200A
90A 370A
535A
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled, air-cooling ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
With Standard-force Magnetic Ways
Force and Speed Characteristics( :Continuous Duty Zone :Intermittent Duty Zone) A B
Notes:1. 2.
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
200V
200V 200V
325 4.4 1300 17.6 2.15 78 26.0 26.0 1.4 3.18 0.44 ― 0
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
550 7.5 2200 30.0 3.6 78 26.0 36.8 1.4 2.66 0.30 ― 0
750 10.2 3000 40.8 4.9 78 26.0 45.0 1.4 2.42 0.25 ― 0
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction Linear Servomotor
Model SGLGW- Heat Sink Size in mm
800×900×1290A200A 90A370A 90A535A
SGLGW-90A200A SGLGW-90A370A SGLGW-90A535A
6.0
5.0
4.0
3.0
2.0
1.0
00 300 1200 1500600 900
Motor Speed (m/s)
Force(N)
A
B
6.0
5.0
4.0
3.0
2.0
1.0
00 500 2000 25001000 1500
Motor Speed (m/s)
Force(N)
A
B
6.0
5.0
4.0
3.0
2.0
1.0
00 700 2800 35001400 2100
Motor Speed (m/s)
Force(N)
A
B

DXF & DWG drawing files available.
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
Dimensional Drawings(Units:mm)●Coil Assembly(SGLGW-90A□□□A□)
* The value indicates the mass of coil assembly with a hall sensor unit.
Hall Sensor Connector Specifications
9 6
15
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type:17L-002C or 17L-002C1
Linear ServomotorConnector Specifications
Plug type: 350779Pin type: 350218-3 or 350547-3 (No.1 to 3) 350654-1 350669-1 (No.4)made by Tyco Electronics AMP K.K.
The mating connector
Cap type: 350780-1 Socket type: 350536-3 or 350550-3
Hall Sensor Output SignalsPin No.
1
2
3
4
Name
Phase U
Phase V
Phase W
FG
Red
White
Blue
Green
LeadColor
Coil Assembly Model SGLGW-
90A200A□ 90A370A□ 90A535A□
L1
199 367 535
L2
189 357 525
L3
130 260 455
L4
40 40 40
L5
60 55 60
L6
95 285 380
N1 N2
3 5 8
Approx. Mass* kg
4 8 10
2.2 3.7 5.0
When the coil assembly moves in the direction indicated by the arrow in the f igure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below.
Electrical Angle(°)
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Inverse power(V)
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V(Power supply)
Phase U
Phase V
Phase W
0V(Power supply)
Not used
Not used
Not used
Not used
●Magnetic Way(SGLGM-90□□□A)
Magnetic Way Model SGLGM- 90252A 90504A
L1
252 504
L2
189 441
N
4 8
Approx. Mass kg
7.3 14.7
2×screws
50.8
49
26 2
Gap 1Gap 1
110 138
11.8
#4-40 UNC
Cable UL2076,AWG26
Cable UL2517,AWG15
(φ5.3)
(φ10.5)
32
500±
50
500±
50
L1
L3L4
L5 L6
L2
95
65
N2×M6 mounting screws, depth 9
Note: The coil assembly moves in the direction indicated by the arrow when current flows in the order of phase U, V, and W.
(See note.)
2×N1-M6 Mounting screws, depth 9 (on both sides)Nameplate
8
121
Nameplate Warning label
8.5
31.5
X
X
19 (44)
(31.5)
N-M6 mounting screws, depth 14.5
φ12
φ6.6
L2Pitch 63
Pitch 63
L1 (1 unit) 0.10.3
6.5
N-mounting holes (per unit)
L2
95.5
110
18.513.8
50.8
X-X
22

23
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
Notes:1. 2.
Ratings and Specifications
Linear Servomotor Type SGLFW- 090A
20A 120A
Linear Servomotor Model SGLFW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLF□-20Iron-core FW
( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V 200V
25 0.7 86 3.0 0.7 36.0 12.0 7.9 3.2 11.0 4.35 7.69 314
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
40 0.8 125 2.9 0.9 54.0 18.0 9.8 3.3 9.3 3.19 5.02 462
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction
125×125×1320A090A 20A120A
SGLFW-20A090A
6.0
5.0
4.0
3.0
2.0
1.0
00 20 40 60 80 100
Motor Speed (m/s)
Force(N)
A B
SGLFW-20A120A
6.0
5.0
4.0
3.0
2.0
1.0
00 40 80 120 140
Motor Speed (m/s)
Force(N)
A B

DXF & DWG drawing files available.
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
A A20
2
5.5
22.5
40
17.5
12.5
45±0.1
34
(44)
(22)
(22)
(32)
0.5
(6)
(20)
22
(Gap 0.8: With magnet cover) (Gap 1: Without magnet cover)
(10.2: With magnet cover) (10: Without magnet cover)
(4.2: With magnet cover) (4: Without magnet cover)
12
500±50
500±50
A A
730 min.
82.5
5.5
L3
(φ6.1)
36
(25) L1
L23030
(12)
(7.5)
(10)
(12.5)
Nameplate
50 min.
Hall sensorMagnetic way
2×screws#4-40 UNC
Note: See the figures ① and ② below.
(See note.)
(φ4.2)
The coil assembly moves in the direction indicated by the arrow, when current flows in the order of phase U, V, and W.
Dimensional Drawings(Units:mm)●Coil Assembly(SGLFW-20A□□□A□)
Coil Assembly Model SGLFW-
20A090A□
20A120A□
L1
91
127
L2
36
72
L3
72
108
2
3
NApprox. Mass kg
0.7
0.9
●Magnetic Way(SGLFM-20□□□A)
Magnetic Way Model SGLFM-
20324A 20540A 20756A
L1-0.1 -0.3
324 540 756
L2
270 (54×5) 486 (54×9) 702 (54×13)
(L3)
(331.6) (547.6) (763.6)
N
6 10 14
Approx. Mass kg
0.9 1.4 2
2×M4 tapped holes, depth 5.5
2012.5
22.5
30 36
①SGLFW-20A090A□
3×M4 tapped holes, depth 5.5
2012.5
22.5
30 36
72
②SGLFW-20A120A□
Plug type: 350779Pin type: 350218-3 or
350547-3 (No.1 to 3)350654-1350669-1 (No.4)
The mating connector
Cap type: 350780-1Socket type: 350536-3 or
350550-3
Hall SensorConnector Specifications
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V (Power supply)
Phase U
Phase V
Phase W
0V (Power supply)
Not used
Not used
Not used
Not used
Linear ServomotorConnector Specifications
Hall Sensor Output Signals
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
When the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below.
Pin No.
1
2
3
4
Name
Phase U
Phase V
Phase W
FG
Lead Color
9 6
15
made by Tyco Electronics AMP K.K.
Red
White
Black
Green
(Gap1)
The height of screw head: 4.2 mm max.
Mounting Screw
2×N×φ4.8mounting holes
Reference mark
SNSN
Reference mark(Two×φ4 marks are engraved.)
S/NYASKAWAYASKAWA
Reference marks
MADE
O/N
Nameplate
S/NO/N
MADE IN JAPAN
YASKAWA
Coil assembly
6
9.9
10
4
(40)
(22.5)
(17.5)
(34)
45±0.1
4.5
3544
(4.5)
(22)
22
54
30.8 -0.20
L1
L2
L3
(54)
(30.8)
-0.3-0.1
TYPE:TYPE:
SNSN
Notes:1. 2.
Multiple SGLFM-20□□□A magnetic ways can be connected. Connect magnetic ways so that the reference marks match one on the other in the same direction as shown in the figure. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way.
Inverse power(V)
Electrical Angle(°)
24

25
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
Ratings and Specifications
Linear Servomotor Model SGLFW- Heat Sink Size in mm
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLF□-35Iron-core FW
Notes:1. 2.
Ratings and Specifications
Linear Servomotor Type SGLFW- 120A
35A 230A
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
Force and Speed Characteristics( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V 200V
254×254×2535A120A 35A230A
SGLFW-35A120A
6.0
5.0
4.0
3.0
2.0
1.0
00 50 100 150 200 250
Motor Speed (m/s)
Force(N)
A B
SGLFW-35A230A
6.0
5.0
4.0
3.0
2.0
1.0
00 100 200 300 400 500
Motor Speed (m/s)
Force(N)
A B
80 1.4 220 4.4 1.3 62.4 20.8 14.4 3.6 6.2 1.57 4.10 809
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
160 2.8 440 8.8 2.3 62.4 20.8 20.4 3.6 5.5 0.96 1.94 1586
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction

A A
12
500±50
500±50
A A
7
L130
(φ6.1)
(φ4.2)
5.5
(10.5)
2
5.5
8
(12.5)
(7.5)
35
L330 min.
L230
45±0.1
34
(32)
0.5
(6)
2.5
2536
55
3025
12.5
(30)
(30)
(8.5) 18
(60)
(Gap 0.8: With magnet cover) (Gap1: Without magnet cover)
(10.2: With magnet cover)(10: Without magnet cover)
(4.2: With magnet cover) (4: Without magnet cover)
Nameplate
50 min.
Hall sensorMagnetic way
2×screws#4-40 UNC
The coil assembly moves in thedirection indicated by the arrowwhen current flows in the orderof phase U, V, and W.
See the figures ① and ② below.
(35)
37
12×M4 tapped holes, depth 5.5
35 188.5
12.5 30 36
180(36×5)
30
②SGLFW-35□230A□
Pin No.
1
2
3
4
Name
Phase U
Phase V
Phase W
FG
Red
White
Black
Green
LeadColor
Plug type: 350779Pin type: 350218-3 or
350547-3 (No.1 to 3)350654-1350669-1 (No.4)
The mating connector
Cap type: 350780-1Socket type: 350536-3 or
350550-3
Linear ServomotorConnector Specifications
made by Tyco Electronics AMP K.K.
Hall SensorConnector Specifications
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V (Power supply)
Phase U
Phase V
Phase W
0V (Power supply)
Not used
Not used
Not used
Not used
6×M4 tapped holes, depth 5.5
35 18
30
8.5
12.5 30 36
72
①SGLFW-35□120A□
9 6
15
DXF & DWG drawing files available.
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
Coil Assembly Model SGLFW-
35□120A□
35□230A□
L1
127
235
L2
72
180
L3
108
216
6
12
NApprox. Mass kg
1.3
2.3
●Coil Assembly(SGLFW-35□□□□A□)Dimensional Drawings (Units:mm)
●Magnetic Way(SGLFM-35□□□A)
Magnetic Way Model SGLFM-
35324A 35540A 35756A
L1-0.1 -0.3
324 540 756
L2
270 (54×5) 486 (54×9) 702 (54×13)
(L3)
(334.4) (550.4) (766.4)
N
6 10 14
Approx. Mass kg
1.2 2 2.9
Notes:1. 2.
Multiple SGLFM-35□□□A magnetic ways can be connected. Connect magnetic ways so that the reference marks match one on the other in the same direction as shown in the figure. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way.
L1
L2Gap1
34
The height of screw head must be 4.2 mm max.
Assembly Dimensions
Reference marks
2×N-φ4.8 mounting holes
Reference mark
S NS SS NNN
Twoφ4 marks are engraved.) Reference mark
MADES/NO/N
TYPE:YASKAWA
Nameplate
S/NO/N
TYPE: MADE IN JAPAN DATE
YASKAWA
Coil assembly
L3
10
46
45±0.1
60 51
3030
4.5
4.5
(55)
(30) (25)
9.9°
32.2
54
-0.20
54
32.2
-0.3-0.1
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Hall Sensor Output Signals
When the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below.
Inverse power(V)
Electrical Angle(°)
26

27
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
Notes:1. 2.
Ratings and Specifications
Linear Servomotor Type SGLFW- 200B
50A 380B
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLF□-50Iron-core FW
Linear Servomotor Model SGLFW- Heat Sink Size in mm
( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V 200V
280 4.1 600 8.7 3.5 72.3 24.1 36.5 17.2 2.6 0.82 1.48 1650
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
560 8.3 1200 17.6 6.9 72.3 24.1 53 17.2 2.6 0.32 0.74 3260
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction
SGLFW-50A200B
5.0
4.0
3.0
2.0
1.0
00 200 400 600
Motor Speed (m/s)
Force(N)
A B
SGLFW-50A380B
5.0
4.0
3.0
2.0
1.0
00 400 800 1200
Motor Speed (m/s)
Force(N)
A B
254×254×25400×500×40
50A200B 50A380B

50.5
33.75
37.75
7
71.5
14
3
37.5
75
37.5
40
43
58± 0.1
0.59
Gap 0.8: With magnet cover)Gap 1: Without magnet cover)
14.2: With magnet cover)14: Without magnet cover)
5.2: With magnet cover)5: Without magnet cover)
2 ×screws #4-40 UNC
A A
500±50
500±50
A A
10
30
φ7.4
φ4.2
14
15 10
2.5
9.5
7
L3
L2
L1
25
55 40
60
1223.5
47.5
50 min.
50 min.
Hall sensorMagnetic way
Nameplate
The coil assembly moves in the directionindicated by the arrow when current flows in the orderof phase U, V, and W.
See the figures ① and ② below.
47.5
6 ×M5 tapped holes, depth 7
47.5
23.5
1214
30 60
120
① SGLFW-50□200B□
Plug type: 350779Pin type: 350218-3 or
350547-3 (No.1 to 3)350654-1350669-1 (No.4)
The mating connectorCap type: 350780-1Socket type: 350536-3 or
350550-3
Hall SensorConnector Specifications
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connectorSocket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V (Power supply)
Phase U
Phase V
Phase W
0V (Power supply)
Not used
Not used
Not used
Not used
Linear ServomotorConnector Specifications
Hall Sensor Output Signals
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
When the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each phase Vu, Vv, Vw becomes as shown in the figure below.
Pin No.
1
2
3
4
Name
Phase U
Phase V
Phase W
FG
Red
White
Black
Green
9 6
15
made by Tyco Electronics AMP K.K.
LeadColor
12 ×M5 tapped holes, depth 7
47.5
23.5
1214 30 60300 60 ×5
② SGLFW-50□380B□
Gap1
Reference mark
Coil assembly
The height of screw head must be 5.2 mm max.
Assembly Dimensions
Reference marks
2 ×N-φ5.8 mounting holes
S SSNS N NN
Two φ4 marks are engraved.)
TYPE:YASKAWA
Nameplate
TYPE:YASKAWA
67.5
9 5
58±0.1
14 43
55
75 65
37.5
37.5
37.75 71.5
33.75
8.6°
39.4 -0.20
L1
L2
L3
-0.3-0.1
67.5
39.4
S/NO/N
MADE IN JAPAN DATE
Reference mark
DXF & DWG drawing files available.
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
Dimensional Drawings(Units:mm)
Coil Assembly Model SGLFW-
50□200B□
50□380B□
L1
215
395
L2
120
300
L3
180
360
6
12
NApprox. Mass kg
3.5
6.9
●Magnetic Way(SGLFM-50□□□A)
Magnetic Way Model SGLFM-
50405A 50675A 50945A
L1-0.1 -0.3
405 675 945
L2
337.5 (67.5×5) 607.5 (67.5×9) 877.5 (67.5×13)
(L3)
(416.3) (686.3) (956.3)
N
6 10 14
Approx. Mass kg
2.8 4.6 6.5
Notes:1. 2.
Multiple SGLFM-50□□□A magnetic ways can be connected. Connect magnetic ways so that the reference marks match one on the other in the same direction as shown in the figure. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way.
●Coil Assembly(SGLFW-50□□□□B□)
Inverse power(V)
Electrical Angle(°)
28

29
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
Notes:1. 2.
Ratings and Specifications
Linear Servomotor Type SGLFW- 200B
1ZA380B
Linear Servomotor Model SGLFW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLF□-1ZIron-core FW
( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V 200V
560 6.3 1200 15.6 6.4 95.8 31.9 56 19 2 0.6 0.92 3300
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
1120 12.6 2400 31.2 11.5 95.8 31.9 79.2 19 1.8 0.28 0.55 6520
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction 254×254×25
400×500×40
SGLFW-1ZA200B
4.0
3.0
2.0
1.0
00 400 800 1200
Motor Speed (m/s)
Force(N)
A B
SGLFW-1ZA380B
Motor Speed (m/s)
1ZA200B 1ZA380B
4.0
3.0
2.0
1.0
00 800 1600 2400
Force(N)
A B

500±50
500±50
A A
60 1015
10L325
95
12
L1L25530
φ8.4
14
φ4.2
95 35.5
35.5
40
98
119
57.5
61.5
62.5
62.5
125
340
714
43
58±0.1
0.59
50 min.
50 min.
Hall sensorMagnetic way
2 screws#4-40 UNC
See the figures ① and ② below.
Gap 0.8: With magnet cover)Gap 1: Without magnet cover)
14.2: With magnet cover)14: Without magnet cover)
5.2: With magnet cover)5: Without magnet cover)
The coil assembly moves in the directionindicated by the arrow when currentflows in the order of phase U, V, and W.
A A
2.5
9.5
7
Nameplate
Plug type: 350779Pin type: 350218-3 or
350547-3 (No.1 to 3)350654-1350669-1 (No.4)
made by Tyco Electronics AMP K.K.The mating connector
Cap type: 350780-1Socket type: 350536-3 or
350550-3
Hall SensorConnector Specifications
9 6
15
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connectorSocket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Pin No.
1
2
3
4
5
6
7
8
9
Name
5V (Power supply)
Phase U
Phase V
Phase W
0V (Power supply)
Not used
Not used
Not used
Not used
Linear ServomotorConnector Specifications
Hall Sensor Output Signals
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
When the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below.
Pin No.
1
2
3
4
Name
Phase U
Phase V
Phase W
FG
Red
White
Blue
Green
LeadColor
9 M5 tapped holes, depth 7
95
35.5
35.5
1214 55 60
120
① SGLFW-1Z□200B□
② SGLFW-1Z□380B□
18 M5 tapped holes, depth 795
35.5
35.5
1214 55 60
300 60×5
125
112
6.5
6.5
62.5
62.5
61.5
57.5
119
43.2
67.5149 5
58±0.1
43
Gap1
Assembly Dimensions
Reference mark
S
Two φ 4 marks are engraved.)
S SS NNNN
Reference mark
Reference marks
φ11.5 counter boring, depth 1.5
Nameplate
2× Nφ 7 mounting holesCoil assembly
8.6°
43.2-0.20
L1
L2
L3
-0.3-0.1
1.5
φ 11.5
TYPE:YASKAWA
TYPE:YASKAWA S/N
O/N
MADE IN JAPAN DATE
67.5
The height of screw head must be 6.7 mm max.
DXF & DWG drawing files available.
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
Coil Assembly Model SGLFW-
1Z□200B□
1Z□380B□
L1
215
395
L2
120
300
L3
180
360
9
18
NApprox. Mass kg
6.4
11.5
●Magnetic Way(SGLFM-1Z□□□A)
Magnetic Way Model SGLFM-
1Z405A 1Z675A 1Z945A
L1-0.1 -0.3
405 675 945
L2
337.5 (67.5×5) 607.5 (67.5×9) 877.5 (67.5×13)
(L3)
(423.9) (693.9) (963.9)
N
6 10 14
Approx. Mass kg
5 8.3 12
Notes:1. 2.
Multiple SGLFM-1Z□□□A magnetic ways can be connected. Connect magnetic ways so that the reference marks match one on the other in the same direction as shown in the figure. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way.
●Coil Assembly(SGLFW-1Z□□□□B□)Dimensional Drawings(Units:mm)
Inverse power(V)
Electrical Angle(°)
30

31
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
Notes:1. 2.
*1.
*2.
Ratings and Specifications
Linear Servomotor Type SGLTW- 170A
20A 460A320A
Linear Servomotor Model SGLTW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
The unbalanced magnetic gap resulted from the coil assembly installation condition causes a magnetic attraction on the coil assembly. The value indicates the magnetic attraction generated on one side of the magnetic way.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLT□-20Iron-core TW
( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V 200V 200V
130 2.3 380 7.7 2.5 61.0 20.3 18.7 5.9 7.5 1.01 1.82 0 802
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N N
380 6.7 1140 23.2 6.7 61.0 20.3 32.3 5.9 6.4 0.38 0.74 0 2380
250 4.4 760 15.4 4.6 61.0 20.3 26.5 5.9 6.5 0.49 1.11 0 1591
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction *1
Magnetic Attraction *2254×254×25
400×500×40
20A170A 20A320A 20A460A
SGLTW-20A170A6.0
5.0
4.0
3.0
2.0
1.0
00 100 200 300 400
Motor Speed (m/s)
Force(N)
A B
SGLTW-20A320A6.0
5.0
4.0
3.0
2.0
1.0
00 200 400 600 800
Motor Speed (m/s)
Force(N)
A B
SGLTW-20A460A6.0
5.0
4.0
3.0
2.0
1.0
00 200 400 600 1000800 1200
Motor Speed (m/s)
Force(N)
A B

●Magnetic Way(SGLTM-20□□□A)
Coil Assembly Model SGLTW- 20A170A□ 20A320A□ 20A460A□
L1
170 315 460
L2
144 (48×3) 288 (48×6) 432 (48×9)
L3
(16) (17) (18)
N
8 14 20
Approx. Mass kg2.5 4.6 6.7
Magnetic Way Model SGLTM- 20324A 20540A 20756A
L1
324 540 756
L2
270 (54×5) 486 (54×9) 702 (54×13)
N
6 10 14
Approx. Mass kg3.4 5.7 7.9
-0.1 -0.3
19.2: With magnet cover)
19: Without magnet cover)
Gap 0.8: With magnet cover)
Gap 1: Without magnet cover)
47.510060 80
2820
1515
70
φ7.4φ4.2
55
500±50
500±50
12
51L3
L1
1
L21048
50
60
90 min.
63 min.
N×M6 tapped holes, depth 12
2×screws 4-40 UNC
Nameplate
Hall sensor
Magnetic way
The coil assembly moves in the directionindicated by the arrow when currentflows in the order of phase U, V, and W.
Plug type: 350779Pin type: 350218-3 or
350547-3 (No.1 to 3)350654-1350669-1(No.4)
The mating connector
Cap type: 350780-1Socket type: 350536-3 or
350550-3
Hall SensorConnector Specifications
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connectorSocket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5VDC
Phase U
Phase V
Phase W
0V
Not used
Not used
Not used
Not used
Linear ServomotorConnector Specifications Hall Sensor Output Signals
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
When the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motoro phase Vu, Vv, Vw becomes as shown in the figure below.
Pin No.
1
2
3
4
Name
Phase U
Phase V
Phase W
Ground
Red
White
Black
Green
9 6
15
made by Tyco Electronics AMP K.K.
LeadColor
Nameplate
S/NO/N
TYPE: MADE IN JAPANDATEYASKAWA
2×N-M6 screws, depth 8
2×N-φ7 mounting holes (See the sectional view for the depth.)Spacers: Do not remove until the coil assembly is mounted on a machine.
(54)
L254
9.9°
L2
54
(29.3)
(54)
R6
(54)
8
40.3 -0.20 L254
(29.3)
L1-0.3-0.1
L1 -0.3-0.1
31.7 -0.2
13.7-0.2
0
0
(9.4)
9.9
2.4±0.3
*2.4±0.3
27
8727
Coilassembly
Mount the magneticway so that its corner surfaces are flush with the inner step.
Assembly Dimensions
C1
C1
32 (8)
(55)40
(1)
100
19
Gap1±0.3
1515 *103 max (preshipment)
*71.5±1 (preshipment)
*70±0.3
*70±0.362 0+0.6
3
R0.5 max R1 max.
Mount the magneticway so that its corner surfaces are flush with the inner step.
Inverse power(V)
Electrical Angle(°)
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
DXF & DWG drawing files available.Dimensional Drawings(Units:mm)●Coil Assembly(SGLTW-20A□□□A□)
Notes:1 2 3 4 5
Two magnetic ways for both ends of coil assembly make one set. Spacers are mounted on magnetic ways for safety during transportation. Do not remove the spacers until the coil assembly is mounted on a machine. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way. Two magnetic ways in a set can be connected to each other. The dimensions marked with an* are the dimensions between the magnetic ways. Be sure to follow exactly the dimensions specified in the figure above. Mount magnetic ways as shown in Assembly Dimensions. The values with an* are the dimensions at preshipment. Use socket headed screws of strength class 10.9 minimum for magnetic way mounting screws. Do not use stainless steel screws.
32

33
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
●Magnetic Way with Base(SGLTM-20□□□AY)
Magnetic Way Model SGLTM- L1
20324AY 20540AY 20756AY
324 540 756
L2
270 486 702
L3
310 526 742
L4
162 378 594
L5
162 189 198
N1
6 10 14
N2
2 3 4
Approx. Mass kg
5.1 8.5 12
Mounting holes
Qty.″2×N1″-See Chart Qty.″2×N2″-See Chart
Qty.″2×N1″-See Chart
Name plate
M6 Bolts 16 length
M6 Tap 8 depthMounting holes φ10
Includes 0.2 thick magnet cover.
Coil Assembly
Serial number label
Air Gap
Base
2715
(2.4±0.3)
132
11687
±0.32.4
L3
L4L5
(0.8)
±0.3
0.819.2
±0.3
70
-0.3-0.1L1
(11.7)
(54)
2.3
2054
L2
9.9゚
74 (14)
(162) 74
(54) 11.7 L254
20
279.9゚
160
1515
(100)
(70) (55)
4015
S/N
O/N
TYPE:MADE IN JAPANDATE
YASKAWA
S/N
O/N
TYPE: MADE IN JAPAN DATE
YASKAWA
Users of pacemakers and similar devices are strongly recommended to maintain minimum distance of 200mm from the magnets. The characteristics of the stators with bases are the same as the ones of the stators without bases (SGLTM-20□□□A).
Notes:1. 2.

Notes:1. 2.
Ratings and Specifications
Linear Servomotor Type SGLTW- 170A
35A 460A320A 170H 320H
Linear Servomotor Model SGLTW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLT□-35Iron-core TW
*1.
*2.
The unbalanced magnetic gap resulted from the coil assembly installation condition causes a magnetic attraction on the coil assembly. The value indicates the magnetic attraction generated on one side of the magnetic way.
( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V 200V 200V
220 3.5 660 12.1 3.7 67.5 22.5 26.7 6.9 5.2 0.76 1.26 0 1403
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N N
670 10.7 2000 36.7 10.0 67.5 22.5 46.4 7.0 4.6 0.32 0.61 0 4165
440 7 1320 24.2 6.8 67.5 22.5 37.5 6.8 4.8 0.44 0.95 0 2784
300 5.1 600 11.9 4.9 64 21.3 37.4 15.1 3.3 0.76 1.26 0 1400
600 10.1 1200 23.9 8.8 64 21.3 52.9 15.1 3.3 0.4 0.83 0 2780
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction *1
Magnetic Attraction *2
254×254×25
400×500×40
35A170A35A320A 35A460A 35A170H 35A320H
SGLTW-35A170A6.0
5.0
4.0
3.0
2.0
1.0
00 200 400 600 700
Motor Speed (m/s)
Force(N)
A B
SGLTW-35A320A6.0
5.0
4.0
3.0
2.0
1.0
00 400 800 1200 1400
Motor Speed (m/s)
Force(N)
A B
SGLTW-35A460A6.0
5.0
4.0
3.0
2.0
1.0
00 1000500 1500 2000 2500
Motor Speed (m/s)
Force(N)
A B
34

35
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
Coil Assembly Model SGLTW- 35□170A□ 35□320A□ 35□460A□
L1
170 315 460
L2
144 (48×3) 288 (48×6) 432 (48×9)
L3
(16) (17) (18)
N
8 14 20
Approx. Mass kg3.7 6.8 10
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
DXF & DWG drawing files available.
200V 200V
Dimensional Drawings(Units:mm)●Coil Assembly(SGLTW-35□□□□A□)
SGLTW-35A170H
0 200 400 600
Motor Speed (m/s)
Force(N)
A B
5.0
4.0
3.0
2.0
1.0
0
SGLTW-35A320H
0 400 800 1200
Motor Speed (m/s)
Force(N)
A B
55
1006028
20
φ8.4
7066
12
φ4.2
500±50
500±50
50
607015
L3L1
80
1
1048
L2
15
19.2: With magnet cover)
19: Without magnet cover)
Gap 0.8: With magnet cover)
Gap 1: Without magnet cover)
2-screws#4×40 UNC
Nameplate
Magnetic way
100 min.
63 min.
Hall sensor
N×M6 tapped holes, depth 12
The coil assembly moves in the directionindicated by the arrow when current flowsin the order of phase U, V, and W.
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5VDC
Phase U
Phase V
Phase W
0V
Not used
Not used
Not used
Not used
Hall Sensor Output SignalsWhen the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below
Plug type: 350779Pin type: 350218-3 or
350547-3 (No.1 to 3)350654-1350669-1 (No.4)
The mating connectorCap type: 350780-1Socket type: 350536-3 or
350550-3
Linear ServomotorConnector Specifications
made by Tyco Electronics AMP K.K.
Pin No.
1
2
3
4
Name
Phase U
Phase V
Phase W
Ground
Red
White
Black
Green
LeadColor
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Hall SensorConnector Specifications
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
9 6
15
Inverse power(V)
Electrical Angle(°)
6.0
5.0
3.0
4.0
2.0
1.0
0

●Magnetic Way(SGLTM-35□□□A)
Notes:1 2 3 4 5
Two magnetic ways for both ends of coil assembly make one set. Spacers are mounted on magnetic ways for safety during transportation. Do not remove the spacers until the coil assembly is mounted on a machine. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way. Two magnetic ways in a set can be connected to each other. The dimensions marked with an* are the dimensions between the magnetic ways. Be sure to follow exactly the dimensions specified in the figure above. Mount magnetic ways as shown in Assembly Dimensions. The values with an* are the dimensions at preshipment. Use socket headed screws of strength class 10.9 minimum for magnetic way mounting screws. Do not use stainless steel screws.
Magnetic Way Model SGLTM- 35324A 35540A 35756A
L1
324 540 756
L2
270 (54×5) 486 (54×9) 702 (54×13)
N
6 10 14
Approx. Mass kg4.8 8 11
-0.1 -0.3
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
54
L2
54
L1-0.3-0.1
15 -0.20
2×N×M6 screws, depth 8
MADE IN JAPAN DATES/NO/N
TYPE:YASKAWA
2×N-φ7 mounting holes (See the sectional view for the depth)
Assembly Dimensions
C1
C1
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Coil assembly
47 8
7055
1
100
19
Gap1±0.3
1515
*103 max. (preshipment)
*71.5±0.1preshipment)
*70±0.3
*70±0.362 0+0.6 5439-0.20 L2
54
L1 -0.3-0.112
9.9
9.9
*2.4±0.3
34.5
L2
54
30.6
54
R6
30.6
33-0.20
87
34.5
*2.4±0.3
R0.5 max.
3
4
Nameplate
Spacers: Do not remove them until thecoil assembly is mounted on the machine.
R1 max.
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
●Magnetic Way with Base(SGLTM-35□□□AY)
Magnetic Way Model SGLTM- L1
35324AY 35540AY 35756AY
324 540 756
L2
270 486 702
L3
310 526 742
L4
162 378 594
L5
162 189 198
N1
6 10 14
N2
2 3 4
Approx. Mass kg
6.4 11 15
Mounting holes
Qty.″2×N2″-See Chart
Qty.″2×N1″-See Chart
Qty.″2×N1″-See Chart
Name plate
M6 Bolts 16 length
M6 Tap 8 depth Mounting holes φ10
Includes 0.2 thick magnet cover.
Serial number label
Air Gap
Base
34.5
15
(2.4±0.3)
(54)
9.9゚
±0.32.4
L5L4
L3
132
11687
±0.3
0.8
(0.8)
19.2
±0.3
70
(54)
9.9゚ 34.5
13 L254
20
(162) (14)
7474
1 (13) 20
54L2
-0.3-0.1L1
60
(100)
1555
(85) (70)
1
1515
Coil Assembly
S/N
O/N
TYPE:MADE IN JAPANDATE
YASKAWA
S/N
O/N
TYPE: MADE IN JAPAN DATE
YASKAWA
Users of pacemakers and similar devices are strongly recommended to maintain minimum distance of 200mm from the magnets. The characteristics of the stators with bases are the same as the ones of the stators without bases (SGLTM-35□□□A).
Notes:1. 2.
36

37
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
●Magnetic Way(SGLTM-35□□□H)
Notes:1 2 3 4 5
Two magnetic ways for both ends of coil assembly make one set. Spacers are mounted on magnetic ways for safety during transportation. Do not remove the spacers until the coil assembly is mounted on a machine. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way. Two magnetic ways in a set can be connected to each other. The dimensions marked with an* are the dimensions between the magnetic ways. Be sure to follow exactly the dimensions specified in the figure above. Mount magnetic ways as shown in Assembly Dimensions. The values with an* are the dimensions at preshipment. Use socket headed screws of strength class 10.9 minimum for magnetic way mounting screws. Do not use stainless steel screws.
Magnetic Way Model SGLTM- 35324H 35540H 35756H
L1
324 540 756
L2
270 (54×5) 486 (54×9) 702 (54×13)
N
6 10 14
Approx. Mass kg4.8 8 11
-0.1 -0.3
3
82 *90±0.3
+0.6 0
0-0.2
120
70
0.8
47
0.2 Y
0.8±0.3
4.2±0.1
15±0.1
*90±0.3
*91.5±1(preshipment)
*123 max. (preshipment)
15±0.1
8
Coil Assembly55Y
XC1
C10.2 X
P
Gap
Includes a 0.2 mm-thick magnet cover.
P
9.9°
9.9°
*2.4±0.3
*2.4±0.3
34.5
107
34.5
12
L239-0.1-0.3L1
54
4
54
YASKAWATYPE:
O/N
S/NMADE IN JAPAN DATE
O/N
S/NMADE IN JAPANDATE
YASKAWATYPE:
30.6
R6
54
5454
54L2
L215L1
(30.6)33 0-0.2
0-0.2
-0.1-0.3
Assembly Dimensions
2×N-M6 tapped holes, depth 8 R0.5 max.
R1 max.
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Spacer: Do not remove them until the coil assembly is mounted on the machine.
2×N-φ7 mounting holes (See the sectional view for the depth.)
Nameplate
Coil Assembly Model SGLTW- 35□170H□ 35□320H□
L1
170 315
L2
144 (48×3) 288 (48×6)
L3
(16) (17)
N
8 14
Approx. Mass kg4.7 8.8
TYPE
YASKAWA ELECTRIC
MADE IN JAPAN
WAV
O/N
S/N
DATE ins.
Linear SERVO MOTOR
m/s
N
12
1
60
2830
62.566
X
XP
0.15 70
L3
φ4.2
9015
15
3080±0.05
120±0.1
500±50
3543
63 min.500±50
20±0.1
Protective tube
CableUL20276 AWG28
100±0.15
48±0.15 201030 L1
L219.2: With magnet cover)
19: Without magnet cover)
Gap 0.8: With magnet cover)
Gap 1: Without magnet cover)
2×screws #4×40 UNC
Nameplate
Magnetic way
Hall sensor
N×M6 tapped holes, depth 12
The coil assembly moves in the directionindicated by the arrow when current flowsin the order of phase U, V, and W.
View from top of coil assembly
If this cable is bent repetitively, the cable willdisconnect.
Lead specifications of coil assembly
Black
Green -
Phase U
Phase V
Phase W
Ground
Color CodeUVW
2mm2
Wire sizeName
2mm2
Phase U
Ground
Phase V
Phase W
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5VDC
Phase U
Phase V
Phase W
0V
Not used
Not used
Not used
Not used
Wiring specificationsof hall sensor cable
9 6
15
Pin connector:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Hall Sensor Output SignalsWhen the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
●Coil Assembly(SGLTW-35□□□□H□)
Electrical Angle(°)
Inverse power(V)
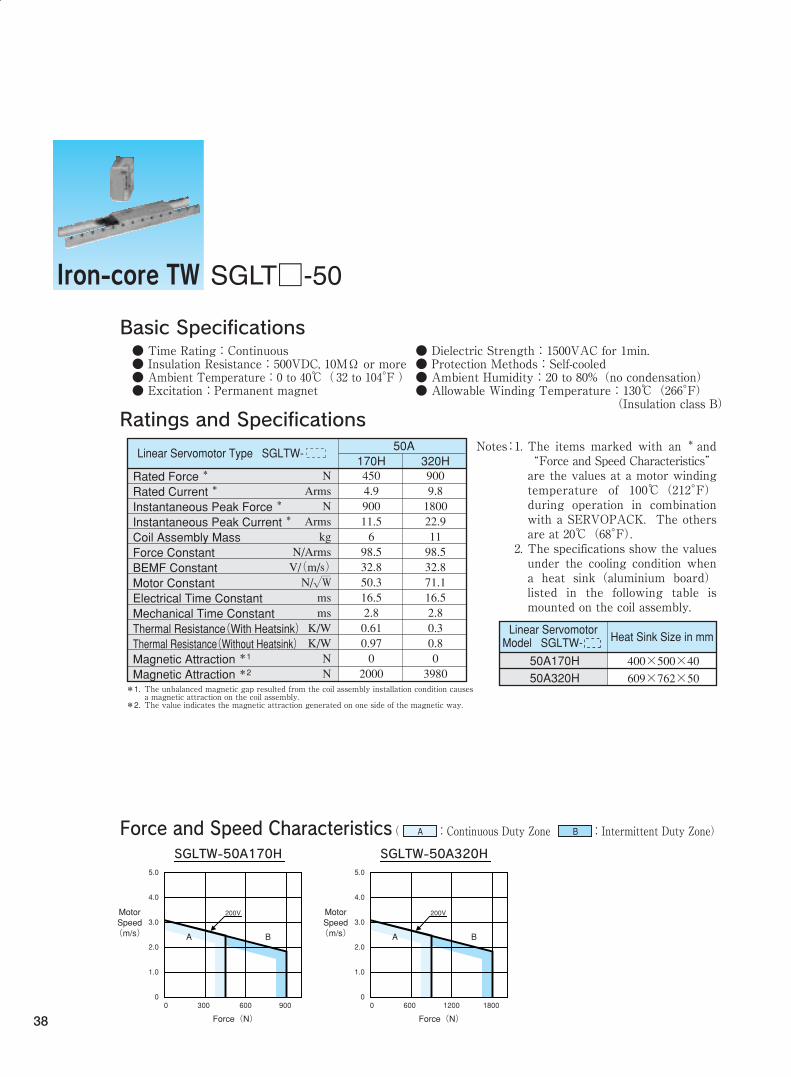
*1.
*2.
Ratings and Specifications
Linear Servomotor Type SGLTW- 170H
50A 320H
Linear Servomotor Model SGLTW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The unbalanced magnetic gap resulted from the coil assembly installation condition causes a magnetic attraction on the coil assembly. The value indicates the magnetic attraction generated on one side of the magnetic way.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLT□-50Iron-core TW
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
Notes:1. 2.
( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V 200V
450 4.9 900 11.5 6 98.5 32.8 50.3 16.5 2.8 0.61 0.97 0 2000
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N N
900 9.8 1800 22.9 11 98.5 32.8 71.1 16.5 2.8 0.3 0.8 0 3980
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction *1
Magnetic Attraction *2400×500×40 609×762×50
50A170H 50A320H
SGLTW-50A170H
0 300 600 900
Motor Speed (m/s)
Force(N)
A B
5.0
4.0
3.0
2.0
1.0
0
SGLTW-50A320H
0 600 1200 1800
Motor Speed (m/s)
Force(N)
A B
5.0
4.0
3.0
2.0
1.0
0
38

39
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V●Magnetic Way(SGLTM-50□□□H)
Notes:1 2 3 4 5
Two magnetic ways for both ends of coil assembly make one set. Spacers are mounted on magnetic ways for safety during transportation. Do not remove the spacers until the coil assembly is mounted on a machine. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way. Two magnetic ways in a set can be connected to each other. The dimensions marked with an* are the dimensions between the magnetic ways. Be sure to follow exactly the dimensions specified in the figure above. Mount magnetic ways as shown in Assembly Dimensions. The values with an* are the dimensions at preshipment. Use socket headed screws of strength class 10.9 minimum for magnetic way mounting screws. Do not use stainless steel screws.
Coil Assembly Model SGLTW- 50□170H□ 50□320H□
L1
170 315
L2
144 (48×3) 288 (48×6)
L3
(16) (17)
N
8 14
Approx. Mass kg6 11
Magnetic Way Model SGLTM- 50324H 50540H 50756H
L1
324 540 756
L2
270 (54×5) 486 (54×9) 702 (54×13)
N
6 10 14
Approx. Mass kg8 13 18
-0.1 -0.3
TYPE
YASKAWA ELECTRIC
MADE IN JAPAN
WAV
O/N
S/N
DATE ins.
Linear SERVO MOTOR
m/s
N
2830
1
X
XP
0.2
4.1
φ4.2
9085
19.1
80±0.05
120±0.1
500±50
3543
63 min.
20±0.1
Nameplate
Hall sensorend connector
500±50
Protective tube
100±0.15
L348±0.1520
1030 L1
L2
19.1
12
60
8162.5
CableUL20276 AWG28
23.3: With magnet cover)
23.1: Without magnet cover)
Gap 0.8: With magnet cover)
Gap 1: Without magnet cover)
2-screws#4×40 UNC
Magnetic way
Hall sensor
N×M6 tapped holes, depth 12
The coil assembly moves in the directionindicated by the arrow when current flowsin the order of phase U, V, and W.
4
O/N
S/NMADE IN JAPANDATE
YASKAWATYPE:
YASKAWATYPE:
O/N
S/NMADE IN JAPAN DATE
5445 L2L1
0-0.2
0-0.2
0-0.2
-0.1-0.3
L1 -0.1-0.3
54
112
4242
φ12
54
5454
L29
27
5427 L2
2×N-M6 tapped holes, depth 8
Spacer: Do not remove them until the coil assembly is mounted on the machine.
2×N- φ7 mounting holes (See the sectional view for the depth.)
Nameplate
3
82 *90±0.3
+0.6 0
120
4.1
85
0.8
62
0.2 Y
0.8±0.3
4.2±0.1
19.1±0.1
*90±0.3
19.1±0.1
8
70Y
XC1
C10.2 X
P
Gap
P
Assembly Dimensions
*91.5±1(preshipment)
*131 max. (preshipment)
Coil assembly
R0.5 max. R1 max.
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Includes a 0.2 mm-thickness magnet cover.
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
DXF & DWG drawing files available.Dimensional Drawings(Units:mm)●Coil Assembly(SGLTW-50□□□□H□)
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5VDC
Phase U
Phase V
Phase W
0V
Not used
Not used
Not used
Not used
Hall Sensor Output SignalsWhen the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below
9 6
15
Pin connector:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Wiring specificationsof hall sensor cable
Ground
Phase UPhase V
Phase W
Black
Green
Phase U
Phase V
Phase W
ColorUVW
2mm2
2mm2
View from top of coil assembly
Ground
Code Wire sizeName
If this cable is bent repetitively, the cable will disconnect.
Lead specifications of coil assembly
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540Electrical Angle(°)
Inverse power(V)

*1.
*2.
Ratings and Specifications
Linear Servomotor Type SGLTW- 400B
40A 600B
Linear Servomotor Model SGLTW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The unbalanced magnetic gap resulted from the coil assembly installation condition causes a magnetic attraction on the coil assembly. The value indicates the magnetic attraction generated on one side of the magnetic way.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLT□-40Iron-core TW
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
Notes:1. 2.
( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V 200V
670 7.3 2600 39.4 15 99.1 33 61.4 15.2 4 0.24 0.57 0 3950
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N N
1000 10.9 4000 60.6 23 99.1 33 75.2 15.2 4 0.2 0.4 0 5890
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction*1
Magnetic Attraction*2 609×762×5040A400B 40A600B
SGLTW-40A400B
0 1000 2000 3000
Motor Speed (m/s)
Force(N)
A B
4.0
3.0
2.0
1.0
0
SGLTW-40A600B
0 2000 4000
Motor Speed (m/s)
Force(N)
A B
4.0
3.0
2.0
1.0
0
40

41
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
●Magnetic Way(SGLTM-40□□□A)
Notes:1 2 3 4 5
Two magnetic ways for both ends of coil assembly make one set. Spacers are mounted on magnetic ways for safety during transportation. Do not remove the spacers until the coil assembly is mounted on a machine. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way. Two magnetic ways in a set can be connected to each other. The dimensions marked with an* are the dimensions between the magnetic ways. Be sure to follow exactly the dimensions specified in the figure above. Mount magnetic ways as shown in Assembly Dimensions. The values with an* are the dimensions at preshipment. Use socket headed screws of strength class 10.9 minimum for magnetic way mounting screws. Do not use stainless steel screws.
Coil Assembly Model SGLTW- 40□400B□ 40□600B□
L1
395 585
L2
360 (60×6) 540 (60×9)
L3
(15) (25)
N
14 20
Approx. Mass kg20 30
Magnetic Way Model SGLTM- 40405A 40675A 40945A
L1
405 675 945
L2
337.5 (67.5×5) 607.5 (67.5×9) 877.5 (67.5×13)
N
6 10 14
Approx. Mass kg9 15 21
-0.1 -0.3
DXF & DWG drawing files available.
Hall SensorConnector Specifications9 6
15
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Pin No.
1
2
3
4
5
6
7
8
9
Name
5V (Power supply)
Phase U
Phase V
Phase W
0V (Power supply)
Not used
Not used
Not used
Not used
Receptacle type: MS3102A-22-22Pmade by DDK Ltd.
The mating connectorL-shaped plug type: MS3108B22-22SStraight plug type: MS3106B22-22SCable clamp type: MS3057-12A
Linear ServomotorConnector Specifications
Pin No.
A
B
C
D
Name
Phase U
Phase V
Phase W
Ground
Hall Sensor Output SignalsWhen the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw, and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the fig-ure on the right side.
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Dimensional Drawings(Units:mm)●Coil Assembly(SGLTW-40□□□□B□)
500±50
Nm/s
Linear SERVO MOTOR
ins.DATE
S/NO/N
VA W
MADE IN JAPAN
YASKAWA ELECTRIC
TYPE
75
φ 4.2
83
78
16L320
63 L1L2
40 60
64 min.
19.1
111.8
97
1
3038
98 124
150
19.1 The coil assembly moves in the direction indicated by the arrow when
current flows in the order of phase U, V, and W.
25.3: With magnet cover)
25.1: Without magnet cover)
Gap 1.2: With magnet cover)
Gap 1.4: Without magnet cover)
Magnetic way
Receptacle
Hall sensor
2× screws#4-40 UNC
N×M8 tapped holes, depth 16
Nameplate
R0.5 max.R1 max. YASKAWA
TYPE: MADE IS/NO/N
TYPE:YASKAWAS/N
O/N
MADE IN JAPANDATE
2×N-M8 screws, depth 10
TYPE:YASKAWA S/N
O/N
MADE IN JAPAN
C1
C1
Spacer: Do not remove them until the coil assembly is mounted on the machine.
67.552.5-0.20 L2
67.5
L1-0.3-0.17.6
39
2× N-φ 9 mounting holes (See the sectional view for the depth.)
Coil assembly
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Assembly Dimensions
*111.8±0.3
100+0.6 0
48 15
83
63
1.4
150
25.1
Gap 1.4
19.1
19.1
*153 max. (preshipment)
*113±1 (preshipment)
*111.8±0.3
±0.3
L267.5
36.167.5
R7
36.1
37.5-0.20
131
*1.4±0.3
*1.4±0.3
67.5L267.5
5.6
L1-0.3-0.1
15-0.20
39
4
5.6
16Nameplate
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Electrical Angle(°)
Inverse power(V)
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in

●Magnetic Way with Base(SGLTM-40□□□AY)
L1
40405AY 40675AY 40945AY
405 675 945
L2
337.5 607.5 877.5
L3
387.5 657.5 927.5
L4
202.5 472.5 742.5
L5
202.5 236.25 247.5
N1
6 10 14
N2
2 3 4
Approx. Mass kg
13 21 30
Magnetic Way Model SGLTM-
Mounting holes
Qty.″2×N2″-See Chart
Qty.″2×N1″-See Chart
Qty.″2×N1″-See Chart Mounting holes φ12
Name plate
M8 Tap 10 depth
M8 Bolts 25 length
Includes 0.2 thick magnet cover.
Coil Assembly
Serial number label
Air Gap
Base
(1.4±0.3)
-0.3-0.1L1
(12.5) L3525 L2 (67.5)
67.55.6゚
(202.5) 92.5 L4L5 92.5 (17.5)
170
190
131
2039
±0.31.4
(83) (103)
1
(1.2)
90
19.1
25.3
±0.3
111.8
±0.3
1.2
5.6゚ 39
12.5 25 (67.5)
67.5L2
6320
19.1
(150)
S/N
O/N
MADE IN JAPANDATE TYPE:YASKAWA
S/N
O/N
MADE IN JAPAN DATETYPE:YASKAWA
Users of pacemakers and similar devices are strongly recommended to maintain minimum distance of 200mm from the magnets. The characteristics of the stators with bases are the same as the ones of the stators without bases (SGLTM-40□□□A).
Notes:1. 2.
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
42

43
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
*1.
*2.
Ratings and Specifications
Linear Servomotor Type SGLTW- 400B
80A 600B
Linear Servomotor Model SGLTW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The unbalanced magnetic gap resulted from the coil assembly installation condition causes a magnetic attraction on the coil assembly. The value indicates the magnetic attraction generated on one side of the magnetic way.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLT□-80Iron-core TW
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
Notes:1. 2.
( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V 200V
1300 11.7 5000 61 25 119.8 39.9 89.9 17 3 0.22 0.47 0 7650
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N N
2000 18 7500 91.4 36 119.8 39.9 110.2 17 3 0.18 0.33 0 11400
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction*1
Magnetic Attraction*2 609×762×5080A400B 80A600B
SGLTW-80A400B
0 2000 4000 6000
Motor Speed (m/s)
Force(N)
A B
4.0
3.0
2.0
1.0
0
SGLTW-80A600B
0 40002000 6000 8000
Motor Speed (m/s)
Force(N)
A B
4.0
3.0
2.0
1.0
0

●Magnetic Way(SGLTM-80□□□A)
Notes:1 2 3 4 5
Two magnetic ways for both ends of coil assembly make one set. Spacers are mounted on magnetic ways for safety during transportation. Do not remove the spacers until the coil assembly is mounted on a machine. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way. Two magnetic ways in a set can be connected to each other. The dimensions marked with an* are the dimensions between the magnetic ways. Be sure to follow exactly the dimensions specified in the figure above. Mount magnetic ways as shown in Assembly Dimensions. The values with an* are the dimensions at preshipment. Use socket headed screws of strength class 10.9 minimum for magnetic way mounting screws. Do not use stainless steel screws.
Coil Assembly Model SGLTW- 80□400B□ 80□600B□
L1
395 585
L2
360 (60×6) 540 (60×9)
L3
(15) (25)
N
14 20
Approx. Mass kg30 43
Magnetic Way Model SGLTM- 80405A 80675A 80945A
L1
405 675 945
L3
337.5 (33.75×10) 607.5 (33.75×18) 887.5 (33.75×26)
L2
337.5 (67.5×5) 607.5 (67.5×9) 877.5 (67.5×13)
N2
11 19 27
N1
6 10 14
Approx. Mass kg14 24 34
-0.1 -0.3
S/NO/N
MADE IN JAPANDATE TYPE:YASKAWA
TYPE:YASKAWA
MADE IN JAPANS/NO/N
2× N1-M8 screws, depth 10
2× N2- φ9 mounting holes (See the sectional view for the depth.)
Assembly Dimensions
TYPE:YASKAWA
S/NO/N
MADE IN JAPAN DATE
C1
C1
Spacers: Do not remove them until the coil assembly is mountedon the machine
Coil assembly
85 15
120100
1.4
150
25.1
Gap 1.4
±0.3
19.1
19.1
*153 max. (preshipment)
*111.8±0.3
*113±1 (preshipment)
R0.5 max.R1 max.
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
*111.8 ±0.3
100 0+0.6
67.550.6 -0.20 L2
67.5
L1 -0.3-0.111.3
*1.5±0.3
57
L333.75
37.9
37.9
67.5
R7
39.4 -0.20
-0.20
131
*1.5±0.3
67.5
L267.5
5.6°
L1 -0.3-0.1
16.9
57
4 5.6°
8Nameplate
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
DXF & DWG drawing files available.Dimensional Drawings(Units:mm)●Coil Assembly(SGLTW-80□□□□B□)
25.3: With magnet cover)
25.1: Without magnet cover)
Gap 1.2: With magnet cover)
Gap 1.4: Without magnet cover)
Coil assemblyReceptacle
Hall sensor
#4-40 UNC2× screws
±50500
75
φ4.2
L3L1L2
63
20
6040
120115
16
64 min.
3038
98 124
15097
19.1
111.8
19.1
m/s
Linear SERVO MOTOR
ins.DATE
S/NO/N
VA W
MADE IN JAPAN
YASKAWA ELECTRIC
TYPE
N× M8 tapped holes, depth 16
The coil assembly moves in the direction indicated by the arrow whencurrent flows in the order of phase U, V, and W.
1
Nameplate
The mating connectorL-shaped plug type: MS3108B22-22SStraight plug type: MS3106B22-22SCable clamp type: MS3057-12A
Receptacle type: MS3102A-22-22Pmade by DDK Ltd.
Linear ServomotorConnector Specifications
Pin No.
A
B
C
D
Name
Phase U
Phase V
Phase W
Ground
Pin No.
1
2
3
4
5
6
7
8
9
Name
5VDC
Phase U
Phase V
Phase W
0V
Not used
Not used
Not used
Not used
Hall Sensor Output SignalsWhen the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv,Vw becomes as shown in the figiure on the right side.
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Hall SensorConnector Specifications9 6
15
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Electrical Angle(°)
Inverse power(V)
44

45
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
●Magnetic Way with Base(SGLTM-80□□□AY)
Magnetic Way Model SGLTM- L1
80405AY 80675AY 80945AY
405 675 945
L2
337.5 607.5 877.5
L3
387.5 657.5 927.5
L4
202.5 472.5 742.5
L5
202.5 236.25 247.5
N1
6 10 14
N3
11 19 27
N2
2 3 4
Approx. Mass kg
18 31 43
M8 Bolts 25 lengthQty.″2×N3″-See Chart
Mounting holes
Qty.″2×N2″-See Chart
Qty.″2×N1″-See Chart
Coil Assembly
Mounting holes φ12
Name plate
M8 Tap 10 depth
Includes 0.2 thick magnet cover.
Serial number label
Air Gap
Base
67.533.75
(67.5) L22514.4
(17.5) (202.5) L492.5
92.5L5
33.75
(67.5) (14.4)
-0.3-0.1L1
3.1 L325 L2
67.5
2057
(1.5±0.3)
5.6゚ 190
170
131
±0.31.5
(120) (140)
±0.3
1.2
(1.2)
25.3
±0.3
111.8
57
90
1
5.6゚
10020
19.1
19.1
(150)
S/N
O/N
MADE IN JAPANDATE TYPE:YASKAWA
S/N
O/N
MADE IN JAPAN DATETYPE:YASKAWA
Users of pacemakers and similar devices are strongly recommended to maintain minimum distance of 200mm from the magnets. The characteristics of the stators with bases are the same as the ones of the stators without bases (SGLTM-80□□□A).
Notes:1. 2.
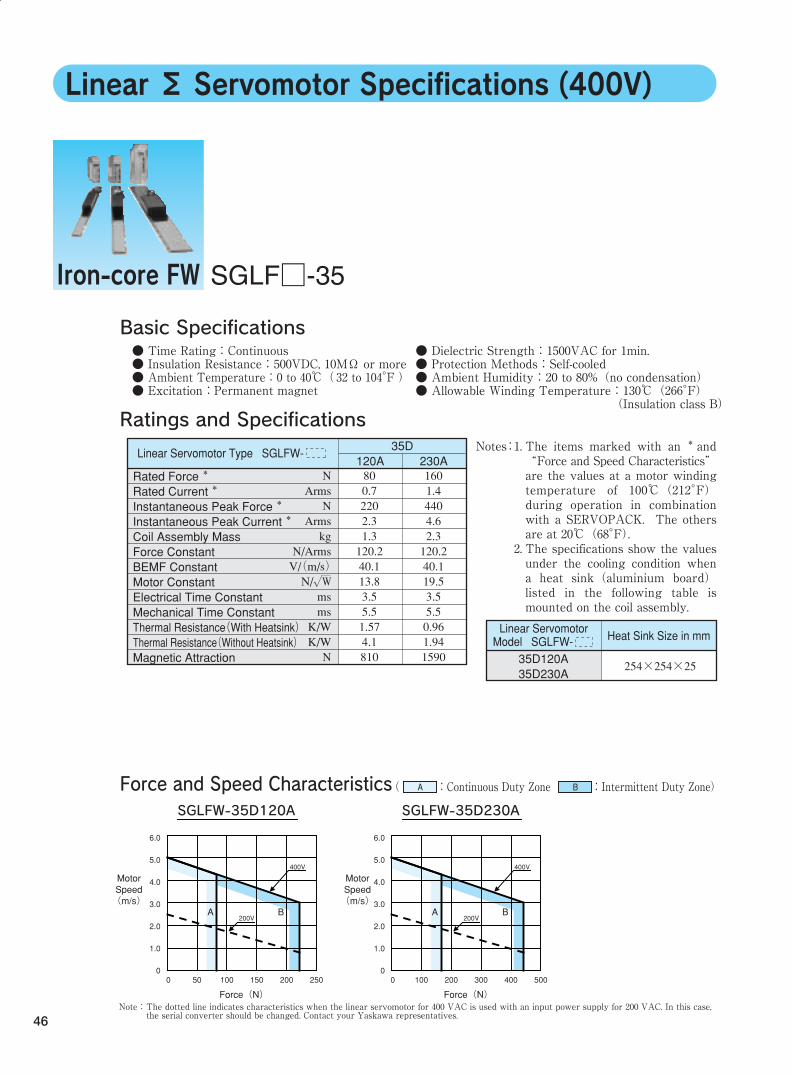
Linear Σ Servomotor Specifications (400V)
Notes:1. 2.
Ratings and Specifications
Linear Servomotor Type SGLFW- 120A
35D 230A
Linear Servomotor Model SGLFW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLF□-35Iron-core FW
The dotted line indicates characteristics when the linear servomotor for 400 VAC is used with an input power supply for 200 VAC. In this case, the serial converter should be changed. Contact your Yaskawa representatives.
Note:
200V
400V
200V
400V
( :Continuous Duty Zone :Intermittent Duty Zone) A B
80 0.7 220 2.3 1.3 120.2 40.1 13.8 3.5 5.5 1.57 4.1 810
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
160 1.4 440 4.6 2.3 120.2 40.1 19.5 3.5 5.5 0.96 1.94 1590
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction
254×254×2535D120A 35D230A
SGLFW-35D120A
6.0
5.0
4.0
3.0
2.0
1.0
0
6.0
5.0
4.0
3.0
2.0
1.0
00 50 100 150 200 250
Motor Speed (m/s)
Motor Speed (m/s)
Force(N)
A B
SGLFW-35D230A
Force(N)
0 100 200 300 400 500
A B
46

47
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK
DXF & DWG drawing files available.
●Magnetic Way(SGLFM-35□□□A)
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
Dimensional Drawings(Units:mm)●Coil Assembly(SGLFW-35D□□□A□D)
Coil Assembly Model
SGLFW-
35D120A□D
35D230A□D
L1
127
235
L2
72
180
L3
108
216
6
12
NApprox. Mass kg
1.3
2.3
Pin No.
1
2
4
5
6
Name
Phase U
Phase V
Phase W
Not used
Not used
Ground
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V (Power supply)
Phase U
Phase V
Phase W
0V (Power supply)
Not used
Not used
Not used
Not used
Extension: LRRA06AMRPN182Pin type: 021.147.2000made by Interconnectron
The mating connectorPlug type: LPRA06BFRDN182Socket type: 020.105.1020
65
4
1
2
Linear ServomotorConnector Specifications
Hall Sensor Output SignalsWhen the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below.
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
9 6
15
Hall SensorConnector Specifications
Pin connector type:7JE-23090-02 (D8C)made by DDK Ltd.
The mating connectorSocket connector type:17JE-13090-02 (D8C)Stud type: 17L-002C or
17L-002C1
35 188.5
12.5 30 36
180(36×5)
30
12×M4 tapped holes, depth 5.5
②SGLFW-35D230A□D
L1
L2Gap1
34
The height of screw head must be 4.2 mm max.
Assembly Dimensions
Reference marks
2×N-φ4.8 mounting holes
Reference mark
S N SS N SNN
Twoφ4 marks are engraved.) Reference mark
MADES/NO/N
TYPE:YASKAWA
Nameplate
S/NO/N
TYPE: MADE IN JAPAN DATE
YASKAWA
Coil assembly
L3
6
10
4
45±0.1
60 51
3030
4.5
4.5
(55)
(30) (25)
9.9°
32.2
54
-0.20
54
32.2
-0.3-0.1
Magnetic Way Model SGLFM-
35324A 35540A 35756A
L1-0.1 -0.3
324 540 756
L2
270 (54×5) 486 (54×9) 702 (54×13)
(L3)
(334.4) (550.4) (766.4)
N
6 10 14
Approx. Mass kg
1.2 2 2.9
A A
12
500±50
500±50
A A
7
L130
(φ6.1)
(φ4.2)
5.5
(10.5)
2
5.5
8
(12.5)
(7.5)
35
L3
L230
45±0.1
34
(32)
0.5
(6)
2.5
2536
55
3025
12.5
(30)
(30)
(8.5) 18
(60)
Nameplate
2×screws#4-40 UNC
(35)
37
(Gap 0.8: With magnet cover) (Gap1: Without magnet cover)
(10.2: With magnet cover)(10: Without magnet cover)
(4.2: With magnet cover) (4: Without magnet cover)
Hall sensorMagnetic way
30 min.
50 min.
The coil assembly moves in thedirection indicated by the arrowwhen current flows in the orderof phase U, V, and W.
See the figures ① and ② below.
35 18
30
8.5
12.5 30 36
72
6×M4 tapped holes, depth 5.5
①SGLFW-35D120A□D
Notes:1. 2.
Multiple SGLFM-35□□□A magnetic ways can be connected. Connect magnetic ways so that the reference marks match one on the other in the same direction as shown in the figure. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way.
Electrical Angle(°)
Inverse power(V)

Notes:1. 2.
Ratings and Specifications
Linear Servomotor Type SGLFW- 200B
50D380B
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLF□-50Iron-core FW
Linear Servomotor Model SGLFW- Heat Sink Size in mm
The dotted line indicates characteristics when the linear servomotor for 400 VAC is used with an input power supply for 200 VAC. In this case, the serial converter should be changed. Contact your Yaskawa representatives.
Note:
200V 200V
400V 400V
( :Continuous Duty Zone :Intermittent Duty Zone) A B
280 2 600 4.7 3.5 150.4 50.1 34.5 17.2 2.6 0.82 1.48 1650
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
560 4 1200 9.5 6.9 150.4 50.1 48.7 17.2 2.6 0.32 0.74 3260
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction 254×254×25
400×500×4050D200B 50D380B
SGLFW-50D200B
5.0
3.0
4.0
2.0
1.0
00 200 400 600
Force(N)
A B
Force(N)
SGLFW-50D380B
5.0
3.0
4.0
2.0
1.0
00 400 800 1200
A B
Motor Speed (m/s)
Motor Speed (m/s)
48

49
Gap1
Reference mark
Coil assembly
The height of screw head must be 5.2 mm max.
Assembly Dimensions
Reference marks
2 ×N-φ5.8 mounting holes
S SNS N SNN
Two φ4 marks are engraved.)
TYPE:YASKAWA
Nameplate
TYPE:YASKAWA
67.5
9 5
58±0.1
14 43
55
75 65
37.5
37.5
37.75 71.5
33.75
8.6°
39.4 -0.20
L1
L2
L3
-0.3-0.1
67.5
39.4
S/NO/N
MADE IN JAPAN DATE
Reference mark
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
DXF & DWG drawing files available.
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
Dimensional Drawings(Units:mm)
Coil Assembly Model
SGLFW-
50D200B□D
50D380B□D
L1
215
395
L2
120
300
L3
180
360
6
12
NApprox. Mass kg
3.5
6.9
●Magnetic Way(SGLFM-50□□□A)
Magnetic Way Model SGLFM-
50405A 50675A 50945A
L1-0.1 -0.3
405 675 945
L2
337.5 (67.5×5) 607.5 (67.5×9) 877.5 (67.5×13)
(L3)
(416.3) (686.3) (956.3)
N
6 10 14
Approx. Mass kg
2.8 4.6 6.5
Notes:1. 2.
Multiple SGLFM-50□□□A magnetic ways can be connected. Connect magnetic ways so that the reference marks match one on the other in the same direction as shown in the figure. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way.
●Coil Assembly(SGLFW-50D□□□B□D)
50.5
33.75
37.75
7
71.5
143
(37.5) (75)
(37.5)
(40)
43
58±0.1
0.5 (9)
A A
500±50
500±50
A A
10
30
(φ7.4)
(φ4.2)
(14)
(15)
(10)
2.5
9.5
7
L3
L2
L1
25
55 40
60
(12)
23.5
47.5
(47.5)
Nameplate
2×screws#4-40 UNC
(Gap 0.8: With magnet cover) (Gap1: Without magnet cover)
(14.2: With magnet cover)(14: Without magnet cover)
(5.2: With magnet cover) (5: Without magnet cover)
Hall sensorMagnetic way
50 min.
The coil assembly moves in the direction indicated by the arrow when current flows in the order of phase U, V, and W.
See the figures ① and ② below.
50 min.
Pin No.
1
2
4
5
6
Name
Phase U
Phase V
Phase W
Not used
Not used
Ground
Extension: LRRA06AMRPN182Pin type: 021.147.2000made by Interconnectron
The mating connectorPlug type: LPRA06BFRDN182Socket type: 020.105.1020
65
4
1
2
Linear ServomotorConnector Specifications
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Inverse power (V)
9 6
15
Hall SensorConnector Specifications
Pin connector type:7JE-23090-02 (D8C)made by DDK Ltd.
The mating connectorSocket connector type:17JE-13090-02 (D8C)Stud type: 17L-002C or
17L-002C1
Hall Sensor Output SignalsWhen the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below.
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V (Power supply)
Phase U
Phase V
Phase W
0V (Power supply)
Not used
Not used
Not used
Not used
47.5
23.5
1214
30 60
120
① SGLFW-50D200B□D
6×M4 tapped holes, depth 7
47.5
23.5
1214 30 60300 (60×5)
② SGLFW-50D380B□D
12×M4 tapped holes, depth 7
Electrical Angle(°)

Notes:1. 2.
Ratings and Specifications
Linear Servomotor Type SGLFW- 200B
1ZD380B
Linear Servomotor Model SGLFW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLF□-1ZIron-core FW
The dotted line indicates characteristics when the linear servomotor for 400 VAC is used with an input power supply for 200 VAC. In this case, the serial converter should be changed. Contact your Yaskawa representatives.
Note:
( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V 200V
400V 400V
560 3.6 1200 8.8 6.4 169.3 56.4 56 19 2 0.6 0.92 3300
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N
1120 7.1 2400 17.7 11.5 169.3 56.4 79.2 19 1.8 0.28 0.55 6520
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction 254×254×25
400×500×401ZD200B 1ZD380B
SGLFW-1ZD200B
4.0
3.0
2.0
1.0
00 400 800 1200
Motor Speed (m/s)
Force(N)
A B
Motor Speed (m/s)
Force(N)
SGLFW-1ZD380B
4.0
3.0
2.0
1.0
00 800 1600 2400
A B
50

51
Outline
SERVOPACK
125
112
6.5
6.5
62.5
62.5
61.5
57.5
119
43.2
67.5149 5
58±0.1
43
Gap1
Assembly Dimensions
The height of screw head must be 6.7 mm max.
Reference mark
S
Twoφ4 marks are engraved.)
S S N SNNN
Reference mark
Reference marks
φ11.5 counter boring, depth 1.5
Nameplate
2×N-φ7 mounting holesCoil assembly
8.6°
43.2-0.20
L1
L2
L3
-0.3-0.1
1.5
φ11.5
TYPE:YASKAWA
TYPE:YASKAWA S/N
O/N
MADE IN JAPAN DATE
67.5
Coil Assembly Model
SGLFW-
1ZD200B□D
1ZD380B□D
L1
215
395
L2
120
300
L3
180
360
9
18
NApprox. Mass kg
6.4
11.5
Linear Servomotor
200V
Linear Servomotor
400V
DXF & DWG drawing files available.
●Magnetic Way(SGLFM-1Z□□□A)
Magnetic Way Model SGLFM-
1Z405A 1Z675A 1Z945A
L1-0.1 -0.3
405 675 945
L2
337.5 (67.5×5) 607.5 (67.5×9) 877.5 (67.5×13)
(L3)
(423.9) (693.9) (963.9)
N
6 10 14
Approx. Mass kg
5 8.3 12
Notes:1. 2.
Multiple SGLFM-1Z□□□A magnetic ways can be connected. Connect magnetic ways so that the reference marks match one on the other in the same direction as shown in the figure. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way.
Dimensional Drawings(Units:mm)
50
500
50050
A A
60
(10)
(15)
10L325
95
(12)
L1L25530
(
(14)
( φ4.2)
(95)
35.5
35.5
40
98
119
57.5
61.5
(62.5)
(62.5)
(125)
3 (40)
714
43
0.158
0.5 (9)
A A
2.5
9.5
7
(Gap 0.8: With magnet cover) (Gap1: Without magnet cover)
(14.2: With magnet cover)(14: Without magnet cover)
(5.2: With magnet cover) (5: Without magnet cover)
Nameplate
2×screws#4-40 UNC
Hall sensorMagnetic way
50 min.
50 min.
The coil assembly moves in the direction indicated by the arrow when current flows in the order of phase U, V, and W.
See the figures and below.① ②
φ8.4)
95
35.5
35.5
1214 55 60
120
①SGLFW-1ZD200B D9×M5 tapped holes, depth 7
95
35.5
35.5
1214 55 60
300 (60×5)
②SGLFW-1ZD380B D
18×M5 tapped holes, depth 7
9 6
15
Hall SensorConnector Specifications
Pin connector type:17JE-23090-02 (D8C)made by DDK Ltd.
The mating connectorSocket connector type:17JE-13090-02 (D8C)Stud type: 17L-002C or
17L-002C1
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5V (Power supply)
Phase U
Phase V
Phase W
0V (Power supply)
Not used
Not used
Not used
Not used
Extension: LRRA06AMRPN182Pin type: 021.147.2000made by Interconnectron
The mating connectorPlug type: LPRA06BFRDN182Socket type: 020.105.1020
65
4
1
2
Linear ServomotorConnector Specifications
Pin No.
1
2
4
5
6
Name
Phase U
Phase V
Phase W
Not used
Not used
Ground
Hall Sensor Output SignalsWhen the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure below.
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540Electrical Angle (° )
Inverse power (V)
●Coil Assembly(SGLFW-1ZD□□□B□D)
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in

Notes:1. 2.
*1.
*2.
Ratings and Specifications
Linear Servomotor Type SGLTW- 170H
35D 320H
Linear Servomotor Model SGLTW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
The unbalanced magnetic gap resulted from the coil assembly installation condition causes a magnetic attraction on the coil assembly. The value indicates the magnetic attraction generated on one side of the magnetic way.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLT□-35Iron-core TW
The dotted line indicates characteristics when the linear servomotor for 400 VAC is used with an input power supply for 200 VAC. In this case, the serial converter should be changed. Contact your Yaskawa representatives.
Note:
200V
400V
200V
400V
( :Continuous Duty Zone :Intermittent Duty Zone) A B
300 3.2 600 7.5 4.7 99.6 33.2 36.3 14.3 3.5 0.76 1.26 0 1400
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N N
600 6.5 1200 15.1 8.8 99.6 33.2 51.4 14.3 3.5 0.4 0.83 0 2780
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction *1
Magnetic Attraction *2 400×500×4035D170H 35D320H
SGLTW-35D170H
5.0
4.0
3.0
2.0
1.0
00 200 400 600
Motor Speed (m/s)
Force(N)
A B
SGLTW-35D320H
Motor Speed (m/s)
Force(N)
6.0
5.0
4.0
3.0
2.0
1.0
00 400 800 1200
A B
52

53
Outline
SERVOPACK
Coil Assembly Model SGLTW- 35D170H□D 35D320H□D
L1
170 315
L2
144 (48×3) 288 (48×6)
L3
(16) (17)
N
8 14
Approx. Mass kg4.7 8.8
Linear Servomotor
200V
Linear Servomotor
400V
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
DXF & DWG drawing files available.Dimensional Drawings(Units:mm)●Coil Assembly(SGLTW-35D□□□H□D)
●Magnetic Way(SGLTM-35□□□H)
Notes:1 2 3 4 5
Two magnetic ways for both ends of coil assembly make one set. Spacers are mounted on magnetic ways for safety during transportation. Do not remove the spacers until the coil assembly is mounted on a machine. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way. Two magnetic ways in a set can be connected to each other. The dimensions marked with an* are the dimensions between the magnetic ways. Be sure to follow exactly the dimensions specified in the figure above. Mount magnetic ways as shown in Assembly Dimensions. The values with an* are the dimensions at preshipment. Use socket headed screws of strength class 10.9 minimum for magnetic way mounting screws. Do not use stainless steel screws.
Magnetic Way Model SGLTM- 35324H 35540H 35756H
L1
324 540 756
L2
270 (54×5) 486 (54×9) 702 (54×13)
N
6 10 14
Approx. Mass kg4.8 8 11
-0.1 -0.3
3
82 *90±0.3
+0.6 0
0-0.2
120
70
0.8
47
0.2 Y
0.8±0.3
4.2±0.1
15±0.1
*90±0.3
*91.5±1(preshipment)
*123 max. (preshipment)
15±0.1
8
Coil Assembly55Y
XC1
C10.2 X
P
Gap
Includes a 0.2 mm-thick magnet cover.
P
9.9°
9.9°
*2.4±0.3
*2.4±0.3
34.5
107
34.5
12
L239-0.1-0.3L1
54
4
54
YASKAWATYPE:
O/N
S/NMADE IN JAPAN DATE
O/N
S/NMADE IN JAPANDATE
YASKAWATYPE:
30.6
R6
54
5454
54L2
L215L1
(30.6)33 0-0.2
0-0.2
-0.1-0.3
Assembly Dimensions
2×N-M6 tapped holes, depth 8 R0.5 max.
R1 max.
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Spacer: Do not remove them until the coil assembly is mounted on the machine.
2×N-φ7 mounting holes (See the sectional view for the depth.)
Nameplate
TYPE
YASKAWA ELECTRIC
MADE IN JAPAN
WAV
O/N
S/N
DATE ins.
Linear SERVO MOTOR
m/s
N
12
1
60
2830
62.566
X
XP
0.15 70
L3
φ4.2
9015
15
3080
±0.05
120
±0.1
500 ±50
500 ±50
3543
63 min.
20±0.1
Nameplate
100
±0.15
48 ±0.15201030 L1
L2
Protective tube
CableUL20276 AWG28
19.2: With magnet cover)
19: Without magnet cover)
Gap 0.8: With magnet cover)
Gap 1: Without magnet cover)
2 ×screws#4 ×40 UNC
Magnetic way
Hall sensor
N×M6 tapped holes, depth 12
The coil assembly moves in the directionindicated by the arrow when current flowsin the order of phase U, V, and W.
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5VDC
Phase U
Phase V
Phase W
0V
Not used
Not used
Not used
Not used
Wiring specificationof hall sensor cable9 6
15
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Hall Sensor Output SignalsWhen the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure on the right side.
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Inverse power (V)
Pin No.
1
2
4
5
6
Name
Phase U
Phase V
Phase W
Not used
Not used
Ground
Extension: LRRA06AMRPN182Pin type: 021.147.2000made by Interconnectron
The mating connectorPlug type: LPRA06BFRDN182Socket type: 020.105.1020
65
4
1
2
Linear ServomotorConnector Specifications
Electrical Angle(°)

*1.
*2.
Ratings and Specifications
Linear Servomotor Type SGLTW- 170H
50D320H
Linear Servomotor Model SGLTW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
The unbalanced magnetic gap resulted from the coil assembly installation condition causes a magnetic attraction on the coil assembly. The value indicates the magnetic attraction generated on one side of the magnetic way.
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLT□-50Iron-core TW
The dotted line indicates characteristics when the linear servomotor for 400 VAC is used with an input power supply for 200 VAC. In this case, the serial converter should be changed. Contact your Yaskawa representatives.
Note:
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
Notes:1. 2.
200V 200V
400V 400V
( :Continuous Duty Zone :Intermittent Duty Zone) A B
450 3.2 900 7.3 6 153.3 51.1 48.9 15.6 2.5 0.61 0.97 0 2000
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N N
900 6.3 1800 14.6 11 153.3 51.1 69.1 15.6 2.5 0.3 0.8 0 3980
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction *1
Magnetic Attraction *2400×500×40 609×762×50
50D170H 50D320H
SGLTW-50D170H
5.0
4.0
3.0
2.0
1.0
00 300 600 900
Motor Speed (m/s)
Force(N)
A B
SGLTW-50D320H
Motor Speed (m/s)
Force(N)
5.0
4.0
3.0
2.0
1.0
00 600 1200 1800
A B
54

55
●Magnetic Way(SGLTM-50□□□H)
Notes:1 2 3 4 5
Two magnetic ways for both ends of coil assembly make one set. Spacers are mounted on magnetic ways for safety during transportation. Do not remove the spacers until the coil assembly is mounted on a machine. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way. Two magnetic ways in a set can be connected to each other. The dimensions marked with an* are the dimensions between the magnetic ways. Be sure to follow exactly the dimensions specified in the figure above. Mount magnetic ways as shown in Assembly Dimensions. The values with an* are the dimensions at preshipment. Use socket headed screws of strength class 10.9 minimum for magnetic way mounting screws. Do not use stainless steel screws.
Coil Assembly Model SGLTW- 50D170H□D 50D320H□D
L1
170 315
L2
144 (48×3) 288 (48×6)
L3
(16) (17)
N
8 14
Approx. Mass kg6 11
Magnetic Way Model SGLTM- 50324H 50540H 50756H
L1
324 540 756
L2
270 (54×5) 486 (54×9) 702 (54×13)
N
6 10 14
Approx. Mass kg8 13 18
-0.1 -0.3
4
O/N
S/NMADE IN JAPANDATE
YASKAWATYPE:
YASKAWATYPE:
O/N
S/NMADE IN JAPAN DATE
5445 L2L1
0-0.2
0-0.2
0-0.2
-0.1-0.3
L1 -0.1-0.3
54
112
4242
φ12
54
5454
L29
27
5427 L2
2×N-M6 tapped holes, depth 8
Spacer: Do not remove them until the coil assembly is mounted on the machine.
2×N- φ7 mounting holes (See the sectional view for the depth.)
Nameplate
3
82 *90±0.3
+0.6 0
120
4.1
85
0.8
62
0.2 Y
0.8±0.3
4.2±0.1
19.1±0.1
*90±0.3
19.1±0.1
8
70Y
XC1
C10.2 X
P
Gap
P
Assembly Dimensions
*91.5±1(preshipment)
*131 max. (preshipment)
Coil assembly
R0.5 max. R1 max.
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Includes a 0.2 mm-thickness magnet cover.
Pin No.
1
2
3
4
5
6
7
8
9
Name
+5VDC
Phase U
Phase V
Phase W
0V
Not used
Not used
Not used
Not used
Pin No.
1
2
4
5
6
Name
Phase U
Phase V
Phase W
Not used
Not used
GroundExtension: LRRA06AMRPN182Pin type: 021.147.2000made by Interconnectron
The mating connectorPlug type: LPRA06BFRDN182Socket type: 020.105.1020
65
4
1
2
Linear ServomotorConnector Specifications
Hall Sensor Output SignalsWhen the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the figure on the right side.
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Inverse power (V)
9 6
15
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Wiring specificationof hall sensor cable
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
DXF & DWG drawing files available.
●Coil Assembly(SGLTW-50D□□□H□D)
Dimensional Drawings(Units:mm)
TYPE
YASKAWA ELECTRIC
MADE IN JAPAN
WAV
O/N
S/N
DATE ins.
Linear SERVO MOTOR
m/s
N
2830
1
X
XP
0.2
4.1
φ4.2
90
85
19.1
80
±0.05
120
±0.1
500 ±50
3543
63 min.
20
±0.1
100
±0.15
L348 ±0.1520
1030 L1
L2
19.1
12
60
8162.5
500 ±50
Protective tube
Nameplate
23.3: With magnet cover)
23.1: Without magnet cover)
Gap 0.8: With magnet cover)
Gap 1: Without magnet cover)
Hall sensor
CableUL20276 AWG28
2 ×screws#4 ×40 UNC
Magnetic way
N×M6 tapped holes, depth 12
The coil assembly moves in the directionindicated by the arrow when current flowsin the order of phase U, V, and W.
Electrical Angle(°)

Ratings and Specifications
Linear Servomotor Type SGLTW- 400B
40D600B
Linear Servomotor Model SGLTW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLT□-40Iron-core TW
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
Notes:1. 2.
*1.
*2.
The unbalanced magnetic gap resulted from the coil assembly installation condition causes a magnetic attraction on the coil assembly. The value indicates the magnetic attraction generated on one side of the magnetic way.
The dotted line indicates characteristics when the linear servomotor for 400 VAC is used with an input power supply for 200 VAC. In this case, the serial converter should be changed. Contact your Yaskawa representatives.
Note:
200V
400V
400V
( :Continuous Duty Zone :Intermittent Duty Zone) A B
670 3.7 2600 20.7 15 196.1 65.4 59.6 14.4 4.2 0.24 0.57 0 3950
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N N
1000 5.5 4000 30.6 23 196.1 65.4 73 14.4 4.2 0.2 0.4 0 5890 609×762×50
40D400B 40D600B
SGLTW-40D400B
4.0
3.0
2.0
1.0
00 1000 2000 3000
Motor Speed (m/s)
Force(N)
A
B
SGLTW-40D600B
Motor Speed (m/s)
Force(N)
4.0
3.0
2.0
1.0
00 2000 4000
A
B
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction *1
Magnetic Attraction *2
200V
56
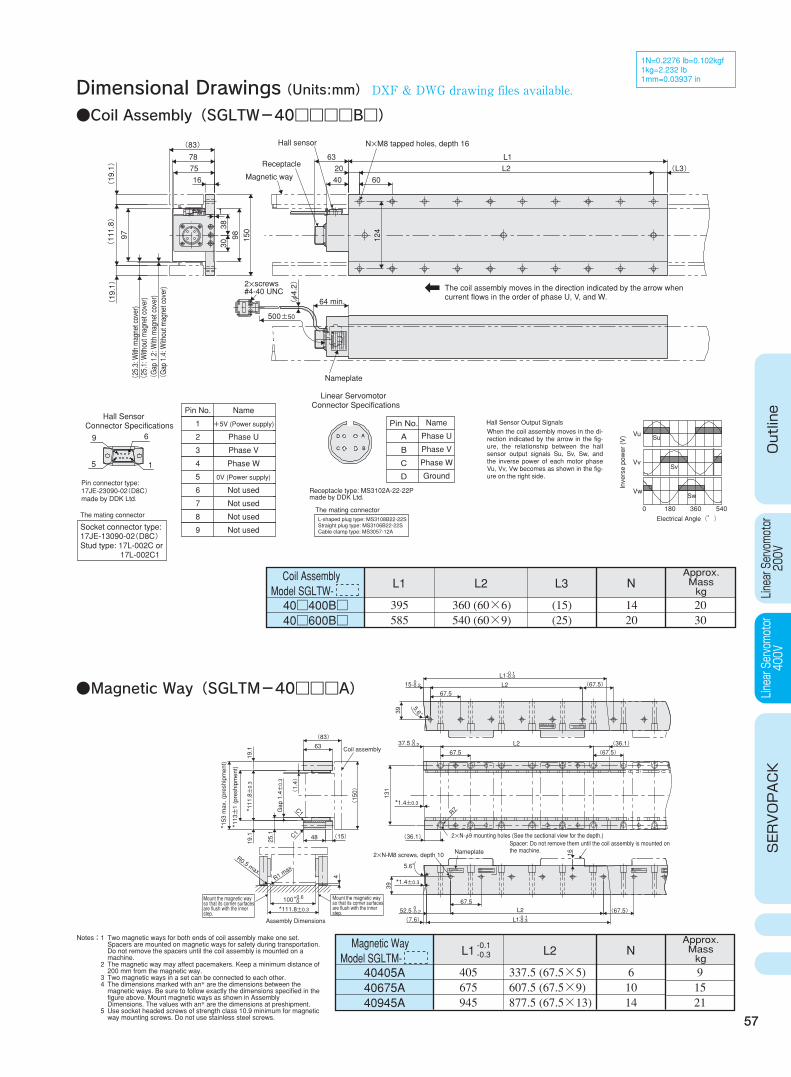
57
Outline
SERVOPACK
●Magnetic Way(SGLTM-40□□□A)
Notes:1 2 3 4 5
Two magnetic ways for both ends of coil assembly make one set. Spacers are mounted on magnetic ways for safety during transportation. Do not remove the spacers until the coil assembly is mounted on a machine. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way. Two magnetic ways in a set can be connected to each other. The dimensions marked with an* are the dimensions between the magnetic ways. Be sure to follow exactly the dimensions specified in the figure above. Mount magnetic ways as shown in Assembly Dimensions. The values with an* are the dimensions at preshipment. Use socket headed screws of strength class 10.9 minimum for magnetic way mounting screws. Do not use stainless steel screws.
Coil Assembly Model SGLTW- 40□400B□ 40□600B□
L1
395 585
L2
360 (60×6) 540 (60×9)
L3
(15) (25)
N
14 20
Approx. Mass kg20 30
Magnetic Way Model SGLTM- 40405A 40675A 40945A
L1
405 675 945
L2
337.5 (67.5×5) 607.5 (67.5×9) 877.5 (67.5×13)
N
6 10 14
Approx. Mass kg9 15 21
-0.1 -0.3
Linear Servomotor
200V
Linear Servomotor
400V
DXF & DWG drawing files available.
Hall SensorConnector Specifications9 6
15
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Pin No.
1
2
3
4
5
6
7
8
9
Name
5V (Power supply)
Phase U
Phase V
Phase W
0V (Power supply)
Not used
Not used
Not used
Not used
Receptacle type: MS3102A-22-22Pmade by DDK Ltd.
The mating connectorL-shaped plug type: MS3108B22-22SStraight plug type: MS3106B22-22SCable clamp type: MS3057-12A
Linear ServomotorConnector Specifications
Pin No.
A
B
C
D
Name
Phase U
Phase V
Phase W
Ground
Hall Sensor Output SignalsWhen the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw, and the inverse power of each motor phase Vu, Vv, Vw becomes as shown in the fig-ure on the right side.
Inverse power (V) Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Dimensional Drawings(Units:mm)●Coil Assembly(SGLTW-40□□□□B□)
500±50
Nm/s
Linear SERVO MOTOR
ins.DATE
S/NO/N
VA W
MADE IN JAPAN
YASKAWA ELECTRIC
TYPE
75
φ 4.2
83
78
16L320
63 L1L2
40 60
64 min.
19.1
111.8
97
1
3038
98 124
150
19.1 The coil assembly moves in the direction indicated by the arrow when
current flows in the order of phase U, V, and W.
25.3: With magnet cover)
25.1: Without magnet cover)
Gap 1.2: With magnet cover)
Gap 1.4: Without magnet cover)
Magnetic way
Receptacle
Hall sensor
2× screws#4-40 UNC
N×M8 tapped holes, depth 16
Nameplate
R0.5 max.R1 max. YASKAWA
TYPE: MADE IS/NO/N
TYPE:YASKAWAS/N
O/N
MADE IN JAPANDATE
2×N-M8 screws, depth 10
TYPE:YASKAWA S/N
O/N
MADE IN JAPAN
C1
C1
Spacer: Do not remove them until the coil assembly is mounted on the machine.
67.552.5-0.20 L2
67.5
L1-0.3-0.17.6
39
2× N-φ 9 mounting holes (See the sectional view for the depth.)
Coil assembly
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Assembly Dimensions
*111.8±0.3100+0.6 0
48 15
83
63
1.4
150
25.1
Gap 1.4
19.1
19.1
*153 max. (preshipment)
*113±1 (preshipment)
*111.8±0.3
±0.3
L267.5
36.167.5
R7
36.1
37.5-0.20
131
*1.4±0.3
*1.4±0.3
67.5L267.5
5.6
L1-0.3-0.1
15-0.20
39
4
5.6
16Nameplate
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
Electrical Angle(°)
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
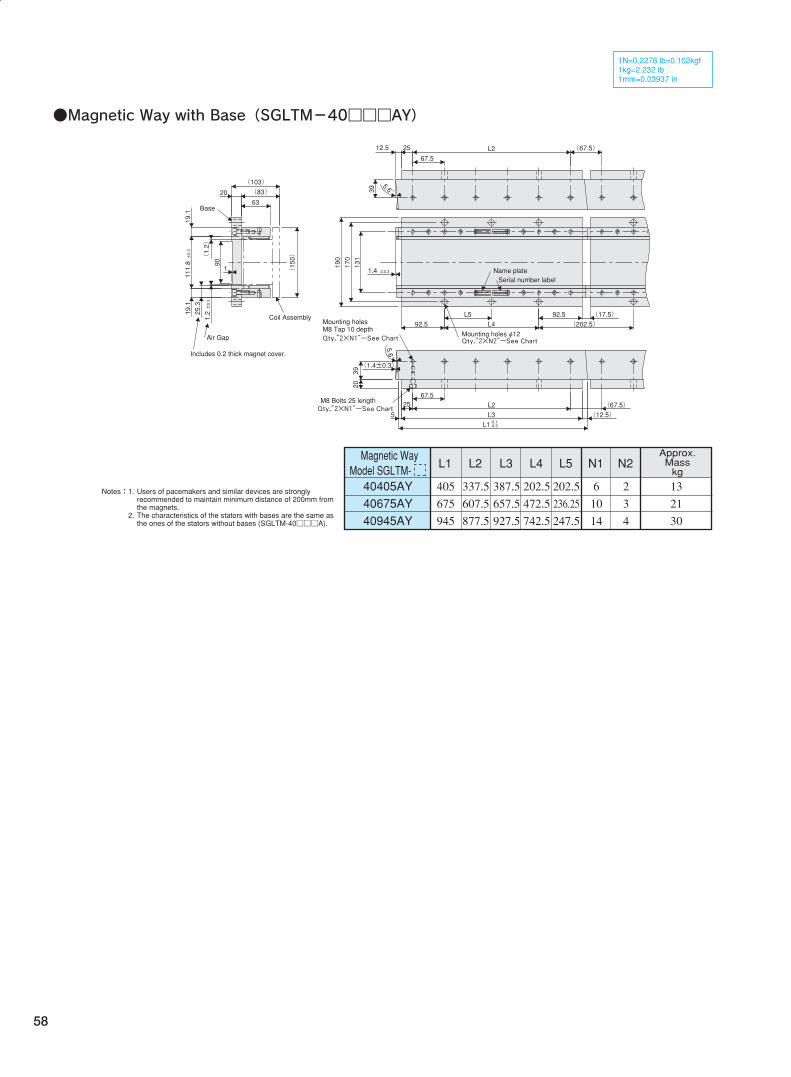
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
●Magnetic Way with Base(SGLTM-40□□□AY)
L1
40405AY 40675AY 40945AY
405 675 945
L2
337.5 607.5 877.5
L3
387.5 657.5 927.5
L4
202.5 472.5 742.5
L5
202.5 236.25 247.5
N1
6 10 14
N2
2 3 4
Approx. Mass kg
13 21 30
Magnetic Way Model SGLTM-
Mounting holes
Qty.″2×N2″-See Chart
Qty.″2×N1″-See Chart
Qty.″2×N1″-See Chart Mounting holes φ12
Name plate
M8 Tap 10 depth
M8 Bolts 25 length
Includes 0.2 thick magnet cover.
Coil Assembly
Serial number label
Air Gap
Base
(1.4±0.3)
-0.3-0.1L1
(12.5) L35
25 L2 (67.5) 67.5
5.6゚
(202.5) 92.5 L4L5 92.5 (17.5)
170
190
131
2039
±0.31.4
(83) (103)
1
(1.2)
90
19.1
25.3
±0.3
111.8
±0.3
1.2
5.6゚ 39
12.5 25 (67.5)
67.5L2
6320
19.1
(150)
S/N
O/N
MADE IN JAPANDATE TYPE:YASKAWA
S/N
O/N
MADE IN JAPAN DATETYPE:YASKAWA
Users of pacemakers and similar devices are strongly recommended to maintain minimum distance of 200mm from the magnets. The characteristics of the stators with bases are the same as the ones of the stators without bases (SGLTM-40□□□A).
Notes:1. 2.
58

59
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
Ratings and Specifications
Linear Servomotor Type SGLTW- 400B
80D600B
Linear Servomotor Model SGLTW- Heat Sink Size in mm
Force and Speed Characteristics
Basic Specifications● Time Rating:Continuous ● Insulation Resistance:500VDC, 10MΩ or more ● Ambient Temperature:0 to 40℃(32 to 104°F ) ● Excitation: Permanent magnet
● Dielectric Strength:1500VAC for 1min. ● Protection Methods:Self-cooled ● Ambient Humidity:20 to 80%(no condensation) ● Allowable Winding Temperature:130℃(266°F) (Insulation class B)
SGLT□-80Iron-core TW
The items marked with an * and“Force and Speed Characteristics”are the values at a motor winding temperature of 100℃(212°F)during operation in combination with a SERVOPACK. The others are at 20℃(68°F). The specifications show the values under the cooling condition when a heat sink(aluminium board)listed in the following table is mounted on the coil assembly.
Notes:1. 2.
*1.
*2.
The unbalanced magnetic gap resulted from the coil assembly installation condition causes a magnetic attraction on the coil assembly. The value indicates the magnetic attraction generated on one side of the magnetic way.
The dotted line indicates characteristics when the linear servomotor for 400 VAC is used with an input power supply for 200 VAC. In this case, the serial converter should be changed. Contact your Yaskawa representatives.
Note:
( :Continuous Duty Zone :Intermittent Duty Zone) A B
200V200V
400V 400V
1300 7.2 5000 37.6 25 194.4 64.8 85.9 15.4 3.2 0.22 0.47 0 7650
N Arms N
Arms kg
N/Arms V/(m/s) N/√W ms ms K/W K/W N N
2000 11.1 7500 56.4 36 194.4 64.8 105.2 15.4 3.2 0.18 0.33 0 11400 609×762×50
80D400B 80D600B
SGLTW-80D400B
4.0
3.0
2.0
1.0
00 2000 4000 6000
Motor Speed (m/s)
Force(N)
A
B
SGLTW-80D600B
Motor Speed (m/s)
Force(N)
4.0
3.0
2.0
1.0
00 2000 4000 6000 8000
A
B
Rated Force * Rated Current * Instantaneous Peak Force * Instantaneous Peak Current * Coil Assembly Mass Force Constant BEMF Constant Motor Constant Electrical Time Constant Mechanical Time Constant Thermal Resistance(With Heatsink) Thermal Resistance(Without Heatsink) Magnetic Attraction *1
Magnetic Attraction *2

●Magnetic Way(SGLTM-80□□□A)
Notes:1 2 3 4 5
Two magnetic ways for both ends of coil assembly make one set. Spacers are mounted on magnetic ways for safety during transportation. Do not remove the spacers until the coil assembly is mounted on a machine. The magnetic way may affect pacemakers. Keep a minimum distance of 200 mm from the magnetic way. Two magnetic ways in a set can be connected to each other. The dimensions marked with an* are the dimensions between the magnetic ways. Be sure to follow exactly the dimensions specified in the figure. Mount magnetic ways as shown in Assembly Dimensions. The values with an* are the dimensions at preshipment. Use socket headed screws of strength class 10.9 minimum for magnetic way mounting screws. Do not use stainless steel screws.
Coil Assembly Model SGLTW- 80□400B□ 80□600B□
L1
395 585
L2
360 (60×6) 540 (60×9)
L3
(15) (25)
N
14 20
Approx. Mass kg30 43
Magnetic Way Model SGLTM- 80405A 80675A 80945A
L1
405 675 945
L3
337.5 (33.75×10) 607.5 (33.75×18) 887.5 (33.75×26)
L2
337.5 (67.5×5) 607.5 (67.5×9) 877.5 (67.5×13)
N2
11 19 27
N1
6 10 14
Approx. Mass kg14 24 34
-0.1 -0.3
S/NO/N
MADE IN JAPANDATE TYPE:YASKAWA
TYPE:YASKAWA
MADE IN JAPANS/NO/N
2×N1-M8 screws, depth 10
2× N2- φ9 mounting holes (See the sectional view for the depth.)
Assembly Dimensions
TYPE:YASKAWA
S/NO/N
MADE IN JAPAN DATE
C1
C1
Spacers: Do not remove them until the coil assembly is mountedon the machine.
Coil assembly
85 15
120100
1.4
150
25.1
Gap 1.4
±0.3
19.1
19.1
*153 max. (preshipment)
*111.8±0.3
*113±1 (preshipment)
R0.5 max.R1 max.
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
*111.8±0.3100 0
+0.6
67.550.6 -0.20 L2
67.5
L1 -0.3-0.111.3
*1.5±0.3
57
L333.75
37.9
37.9
67.5
R7
39.4 -0.20
-0.20
131
*1.5±0.3
67.5
L267.5
5.6°
L1 -0.3-0.1
16.9
57
4 5.6°
8Nameplate
Mount the magnetic wayso that its corner surfacesare flush with the innerstep.
DXF & DWG drawing files available.Dimensional Drawings(Units:mm)●Coil Assembly(SGLTW-80□□□□B□)
25.3: With magnet cover)
25.1: Without magnet cover)
Gap 1.2: With magnet cover)
Gap 1.4: Without magnet cover)
Coil assemblyReceptacle
Hall sensor
#4-40 UNC2× screws
±50500
75
φ4.2
L3L1L2
63
20
6040
120115
16
64 min.
3038
98 124
15097
19.1
111.8
19.1
m/s
Linear SERVO MOTOR
ins.DATE
S/NO/N
VA W
MADE IN JAPAN
YASKAWA ELECTRIC
TYPE
N× M8 tapped holes, depth 16
The coil assembly moves in the direction indicated by the arrow whencurrent flows in the order of phase U, V, and W.
1
Nameplate
The mating connectorL-shaped plug type: MS3108B22-22SStraight plug type: MS3106B22-22SCable clamp type: MS3057-12A
Receptacle type: MS3102A-22-22Pmade by DDK Ltd.
Linear ServomotorConnector Specifications
Pin No.
A
B
C
D
Name
Phase U
Phase V
Phase W
Ground
Pin No.
1
2
3
4
5
6
7
8
9
Name
5VDC
Phase U
Phase V
Phase W
0V
Not used
Not used
Not used
Not used
Hall Sensor Output SignalsWhen the coil assembly moves in the di-rection indicated by the arrow in the fig-ure, the relationship between the hall sensor output signals Su, Sv, Sw and the inverse power of each motor phase Vu, Vv,Vw becomes as shown in the figiure on the right side.
Vu
Vv
Vw
Su
Sv
Sw
0 180 360 540
Inverse power (V)
Hall SensorConnector Specifications9 6
15
Pin connector type:17JE-23090-02 D8Cmade by DDK Ltd.
The mating connector
Socket connector type:17JE-13090-02 D8CStud type: 17L-002C or
17L-002C1
Electrical Angle(°)
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
60

61
Outline
SERVOPACK
Linear Servomotor
200V
Linear Servomotor
400V
●Magnetic Way with Base(SGLTM-80□□□AY)
Magnetic Way Model SGLTM- L1
80405AY 80675AY 80945AY
405 675 945
L2
337.5 607.5 877.5
L3
387.5 657.5 927.5
L4
202.5 472.5 742.5
L5
202.5 236.25 247.5
N1
6 10 14
N3
11 19 27
N2
2 3 4
Approx. Mass kg
18 31 43
M8 Bolts 25 lengthQty.″2×N3″-See Chart
Mounting holes
Qty.″2×N2″-See Chart
Qty.″2×N1″-See Chart
Coil Assembly
Mounting holes φ12
Name plate
M8 Tap 10 depth
Includes 0.2 thick magnet cover.
Serial number label
Air Gap
Base
67.533.75
(67.5) L22514.4
(17.5) (202.5) L492.5
92.5L5
33.75
(67.5) (14.4)
-0.3-0.1L1
3.1 L3
25 L267.5
2057
(1.5±0.3)
5.6゚ 190
170
131
±0.31.5
(120) (140)
±0.3
1.2
(1.2)
25.3
±0.3
111.8
57
90
1
5.6゚
10020
19.1
19.1
(150)
S/N
O/N
MADE IN JAPANDATE TYPE:YASKAWA
S/N
O/N
MADE IN JAPAN DATETYPE:YASKAWA
Users of pacemakers and similar devices are strongly recommended to maintain minimum distance of 200mm from the magnets. The characteristics of the stators with bases are the same as the ones of the stators without bases (SGLTM-80□□□A).
Notes:1. 2.
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in

Servodriver(SERVOPACK)Specifications
Ratings and SpecificationsSGDH
0 to +55℃/-20 to +85℃ 90% RH or less(non-condensing) 1000m or less above sea level 4.9m/s2/19.6m/s2
1:5000(The lower limit of speed is under rated load and no stopping conditions.) During 0 to 100% load:±0.01% or less(at rated speed) Rated voltage ±10%:0%(at rated speed) 25 ±25℃:±0.1% or less(at rated speed) 400Hz(at JL = JM) ±2% 0 to 10s(Acceleration, deceleration each.) ±6VDC at rated speed:set at delivery Variable setting range:±2 to ±10VDC at rated speed/max. input voltage:±12V Approx. 14kΩ Approx. 47μs ±3VDC at rated force:set at delivery Variable setting range:±1 to ±10VDC at rated force reference / max. input voltage:±12V Approx. 14kΩ Approx. 47μs 0 to 450 mm/s.(setting resolution:1 mm/s) 0 to 100%(setting resolution:1%) 0 to 250 reference units(setting resolution:1 reference unit) Sign + pulse train, 90°phase difference 2-phase pulse(phase A + phase B), or CCW/CW pulse train Line driver(+5V level),open collector(+5V or +12V level) 500kpps max.(200kpps max. at open collector) Clear signal(input pulse form is same as reference input pulse form) Phase A,phase B,phase C:Line driver output. Servo ON, pole detection start(or control mode switching, zero clamp, reference pulse inhibit), forward / reverse run prohibit, alarm reset, forward/reverse current limit(or internal speed selection) Servo alarm, alarm codes(3-bit output):CN1 output terminal is fixed. It is possible to output three types of signals from among:positioning complete(or speed coincidense), motor moving, servo ready, current limit, speed limit, brake release, warning, and NEAR. Digital operator(hand-held type), RS-422A port for PCs, etc.(RS-232C ports under some conditions) N may equal up to 14 when an RS-422A port is used. Set by user setting parameter. Status display, user parameter setting, monitor display, alarm traceback display, JOG run/ auto-tuning operations, and graphing functions for speed/torque reference signal, etc. Position/speed loop gain and integral time constant can be automatically set. Operates at main power OFF, servo alarm, servo OFF or overtravel Regenerative resistor externally mounted(option) DB stop, deceleration stop or coast to stop at P-OT,N-OT operation Optional division possible 0.01<B/A<100 3 speeds may be set internally Overcurrent, overvoltage, low voltage, regeneration error, overload, main circuit detection error, heatsink overheat, power open phase, overflow, overspeed, encoder error, overrun, CPU error, parameter error, etc. Integrates analog monitor connectors for supervision of the speed and force reference signals, etc. CHARGE,POWER,7-segment LED×5(Integrated digital operator function) Reverse movement connection, zero point search, automatic servomotor ID and DC reactor connection terminal for harmonic suppressions(except for SGDH-75AE-□)
Basic Specifications
Speed/Force Control Mode
Position Control Mode
I/O Signal
Internal Functions
Conditions
Performance
Input Signal
Input SignalPerformance
Usage/storage Temperature Usage/storage Humidity Altitude Vibration/Shock Resistance Speed Control Range
Frequency Characteristics Force Control Tolerance(Repeatability) Soft Start Time Setting
Bias Setting Feed Forward Gain Compensation Position Completed Width Setting
Position Output Signal
Sequence Input Signal
Sequence Output Signal
Communications
Auto-tuning Dynamic Brake (DB) Regenerative Processing Overtravel (OT) Prevention Encoder Divider Electronic Gearing Internal Speed Setting
Protection
Analog Monitor Functions for Supervision Display
Others
Control Signal
Load Regulation Voltage Regulation Temperature Regulation
Reference Voltage
Input Impedance Circuit Time Constant
Speed Regulation
Speed Reference Input
Reference Voltage
Input Impedance Circuit Time Constant
Input Pulse Type
Input Pulse Form Input Pulse Frequency
Force Reference Input
Reference Pulse
Interface
1:N Communications Axis Address Setting
Items
62
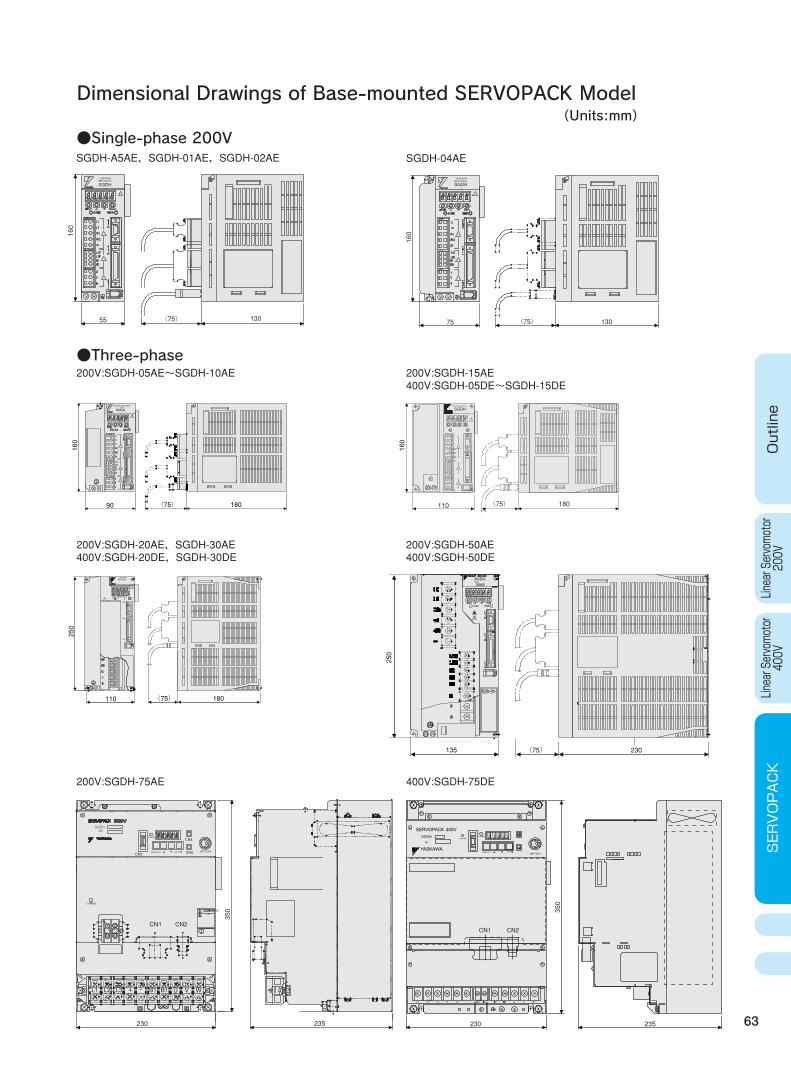
63
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK
Dimensional Drawings of Base-mounted SERVOPACK Model(Units:mm)
●Single-phase 200V
●Three-phase
SGDH-A5AE,SGDH-01AE,SGDH-02AE SGDH-04AE
SGDH
160
75 (75) 130
CN3 CN5
CN8POWER
MODE/SET DATA/ BATTERY
CHARQE
L1C2CN2CN1
230
L1 L2 L3 + - B1 B1 U V W
350
235
160
90 (75) 180
250
110 (75) 180
250
135 (75) 230
230 235
350
CN2CN1
160
(75) 180
SGDHYASKAWA SERVOPACK
110
-
160
55 (75) 130
200V:SGDH-50AE 400V:SGDH-50DE
400V:SGDH-75DE200V:SGDH-75AE
200V:SGDH-20AE,SGDH-30AE 400V:SGDH-20DE,SGDH-30DE
200V:SGDH-05AE~SGDH-10AE 200V:SGDH-15AE 400V:SGDH-05DE~SGDH-15DE

●Three-phase 200V:2.0 kW/3.0 kWThree-phase 400V:2.0 kW/3.0 kW
●Three-phase 200V:5.0 kWThree-phase 400V:5.0 kW
Dimensional Drawings of Rack-mounted SERVOPACK Model
Dimensional Drawings of Duct-ventilated SERVOPACK Model
●Single-phase 200V:50 W/100 W/200 W ●Single-phase 200V:400 W
●Three-phase 200V:500 W/750 W/1.0 kW ●Three-phase 200V:1.5 kWThree-phase 400V:500 W/750 W/1.0 kW/1.5 kW
SGDH-A5AE-R,SGDH-01AE-R,SGDH-02AE-R SGDH-04AE-R
200V:SGDH-50AE-R 400V:SGDH-50DE-R
400V:SGDH-75DE-P200V:SGDH-75AE-P
200V:SGDH-20AE-R,SGDH-30AE-R 400V:SGDH-20DE-R,SGDH-30DE-R
SGDH-05AE-R,SGDH-08AE-R,SGDH-10AE-R
●Three-phase 200V:7.5 kW ●Three-phase 400V:7.5 kW
200V:SGDH-15AE-R 400V:SGDH-05DE-R,SGDH-08DE-R,SGDH-10DE-R SGDH-15DE-R
195
55 (75) 130
195
110 (75) 180
180(75)110
285
285
135 (75) 230
350
230 235
350
230 228
195
75 (75) 130
195
90 (75) 180
64

65
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK
Be sure to prepare the end of the shielded wire properly.
Linear Servomotor
L1
L2
1
2
CN1
U
V
W
M
A( 1)
B( 2)
C( 3)
D( 4)
Linear EncoderSerial ConverterCN2
B1 B2
SERVOPACKType SGDH
Be sure to ground
PG
Connection Diagram●Single-phase
Servodriver(SERVOPACK)Specifications
L1C
L2C
1KM
1PL
(For servo alarm display)
Main circuit power supply
Main circuit power supply
1KM
1KM 1SUP
1Ry
1Ry
ONOFF
R T
1QF
FIL
: Molded-case circuit breaker : Noise filter : Magnetic contactor : Relay
: Indicator lamp : Surge suppressor : Flyweel diode
1QF FIL 1KM 1Ry
1PL 1SUP 1D
FG
Connector shell
Connect shield to connector shell.
37
38
39
33
34
35
36
19
20
ALO1
ALO2
ALO3
PAO
/PAO
PBO
/PBO
PCO
/PCO
1 SG
Alarm code output Max. operating voltage: 30 VDC Max. operating current: 20 mA DC
PG dividing ratio output Applicable line receiver SN75175 manufactured by Texas Instruments or the equivalent corresponding to MC3486
represents twisted-pair wires.
The time constant for the primary filter is 47 μs. Customers must purchase a 24 VDC power supply with double-shielded enclosure. The functions allocated to the input signals SI0 to SI6 and the output signals SO1 to SO3 can be changed by using the parameters.
*1.
*2. *3. Note:
(SO1)
(SO2)
(SO3)
25
26
27
28
29
30
31
32
/TGON+
/TGON-
/S-RDY+
/S-RDY-
ALM+
ALM-
Speed coincidence detection (ON when speed coincides.)
Running output (ON when the motor speed exceeds the settings.)
Servo ready output (ON when ready)
Servo alarm output (OFF for an alarm)
Photocoupler output Max. operating voltage: 30 VDC Max. operating current: 50 mA DC
/V-CMP+( / COIN+) /V-CMP-( / COIN-)
Speed Reference ±2 to ±10V/Rated Motor Speed
Force Reference ±1 to ±10V/Rated Force
*1V-REF 5
6
9
10
SG
T-REF
SG
*2
*2
LPF
LPF
A/D
Position reference
Open-collector reference power supply
PULS CW Phase A
PULS 7
8
11
12
15
14
3
13
18
/PULS
SIGN
/SIGN
CLR
/CLR
PL1
+12V
120Ω
120Ω
150Ω
1kΩ
PL2
PL3
SIGN CCW Phase B
CLR
+24V +24VIN
/S-ON
/P-CON
P-OT
N-OT
/ALM-RST
/P-CL
/N-CL
3.3kΩ
(SI0)
(SI1)
(SI2)
(SI3)
(SI4)
(SI5)
(SI6)
47
40
41
42
43
44
45
46
*3
Servo ON (Servo ON when ON)
P control (P control when ON)
Forward run prohibited (Prohibited when OFF)
Reverse run prohibited (Prohibited when OFF)
Alarm reset (Reset when ON)
Forward current limit (Limit when ON)
Reverse current limit (Limit when ON)
Linear Servomotor
Single-phase 200 to 230 VAC or Single-phase 100 to 115 VAC+10%-15%
+10%-15%
(50/60Hz) (50/60Hz)

●Three-phaseThree-phase 200 to 230 VAC+10%-15%(50/60Hz)
CN1
FG
Connector shell
Connect shield to connector shell.
37
38
39
33
34
35
36
19
20
ALO1
ALO2
ALO3
PAO
/PAO
PBO
/PBO
PCO
/PCO
1 SG
Alarm code output Max. operating voltage: 30 VDC Max. operating current: 20 mA DC
PG dividing ratio output Applicable line receiver SN75175 manufactured by Texas Instruments or the equivalent corresponding to MC3486
represents twisted-pair wires.
The time constant for the primary filter is 47 μs. Customers must purchase a 24 VDC power supply with double-shielded enclosure. When using SERVOPACK of 7.5kw connect an external regenerative resistor between B1 and B2.(B3 terminal is not provided) The functions allocated to the input signals SI0 to SI6 and the output signals SO1 to SO3 can be changed by using the parameters.
*1.
*2. *3. *4. Note:
(SO1)
(SO2)
(SO3)
25
26
27
28
29
30
31
32
/TGON+
/TGON-
/S-RDY+
/S-RDY-
ALM+
ALM-
Speed coincidence detection (ON when speed coincides.)
Running output (ON when the motor speed exceeds the settings.)
Servo ready output (ON when ready)
Servo alarm output (OFF for an alarm)
Photocoupler output Max. operating voltage: 30 VDC Max. operating current: 50 mA DC
/V-CMP+( / COIN+) /V-CMP-( / COIN-)
Speed Reference ±2 to ±10V/Rated Motor Speed
Force Reference ±1 to ±10V/Rated Force
*1V-REF 5
6
9
10
SG
T-REF
SG
*2
*2
LPF
LPF
A/D
Position reference
Open-collector reference power supply
PULS CW Phase A
PULS 7
8
11
12
15
14
3
13
18
/PULS
SIGN
/SIGN
CLR
/CLR
PL1
+12V
120Ω
120Ω
150Ω
1kΩ
PL2
PL3
SIGN CCW Phase B
CLR
+24V +24VIN
/S-ON
/P-CON
P-OT
N-OT
/ALM-RST
/P-CL
/N-CL
3.3kΩ
(SI0)
(SI1)
(SI2)
(SI3)
(SI4)
(SI5)
(SI6)
47
40
41
42
43
44
45
46
*3
Servo ON (Servo ON when ON)
P control (P control when ON)
Forward run prohibited (Prohibited when OFF)
Reverse run prohibited (Prohibited when OFF)
Alarm reset (Reset when ON)
Forward current limit (Limit when ON)
Reverse current limit (Limit when ON)
R TS
1QF : Molded-case circuit breaker : Noise filter : Magnetic contactor : Relay
: Indicator lamp : Surge suppressor : Flyweel diode
1QF FIL 1KM 1Ry
1PL 1SUP 1D
FIL
1KM
1PL
(For servo alarm display)
Main circuit power supply
Main circuit power supply
1KM
1KM 1SUP
1RyONOFF
L1C
L2C
L1
L2
L3
Be sure to ground
1
2
*4
SERVOPACKType SGDH
Linear EncoderSerial Converter
U
V
W
M
A( 1)
B( 2)
C( 3)
D( 4)
PG
CN2
Be sure to prepare the end of the shielded wire properly.
Linear Servomotor
B1 B2 B3
66

67
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK
OptionSerial Converter Unit(JZDP-A00□-□□□)
Characteristics and Specifications
Dimensional Drawings(Units:mm)
Power Supply Voltage Current Consumption *1
Signal Resolution Max. Response Frequency Analog Input Signal *2
(Cos,Sin,Ref) Hall Sensor Inputs Signal Output Signals*3
Output Method Transmission Cycle Output Circuit Approx. Mass Vibration Resistance Shock Resistance Operating Temperature Storage Temperature Humidity
+5.0VDC ±5% ripple content 5% max. 120mA Typ. 350mA max. Input 2-phase sine wave:1/256 pitch 250kHz Differential input amplitude:0.4 to 1.2V Input signal level:1.5 to 3.5V CMOS level Position data, hall sensor information, and alarms Serial data transmission (HDLC (High-level Data Link Control) protocol format with Manchester codes) 62.5 μs Balanced transceiver (SN75LBC176 or the equivalent) Internal terminal resistance: 120 Ω 150g 98m/s2 max.(1 to 2500Hz) in 3 directions 980m/s2,(11ms)in 3 directions for 2 times 0 to +55℃(32 to 131
。F)
-20 to +80℃(-4 to 176。F)
20 to 90%RH(non-condensing)
Electrical Characteristics
Mechanical
Characteristics
Environment
Item Specifications
*1 The current consumption of the linear scale and hall sensor is not
included in this value.
The current consumption of linear scale and hall sensor must be
taken into consideration for the current capacity of host controller
that supplies the power. The current consumption of hall sensor:
Approx. 40 mA.
*2 Input a value within the specified range. Otherwise, incorrect
position information is output, and the device may be damaged.
*3 The transmission is enabled 100 to 300 ms after the power turns
ON.
Do not use the empty pins. The linear scale (analog 1Vp-p output, D-sub 15-pin, male) manufactured by Heidenhain Corp. can be directly connected. Contact Heidenhain Corp. for details.
Notes: 1. 2.
●Linear Scale without Cable for Hall Sensor by Heidenhain Serial Converter Unit Model:JZDP-A003-□□□
Pin No. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Case
cos input (A+) 0V sin input (B+) +5V Empty Empty /Ref input (R-) Empty /cos input (A-) 0V sensor /sin input (B-) 5V sensor Empty Ref input (R+) Empty Shield
Signal
Pin No. 1 2 3 4 5 6 7 8 9 Case
+5V S-phase output Empty Empty 0V /S-phase output Empty Empty Empty Shield
Signal
17-series connector model: 17LE-13090-27 (socket) by DDK Ltd.
CN1 SERVOPACK end Serial data output
16
59
1 9
8 15
Linear scale end Analog signal input connector (CN2)
2×#4-40 UNC tapped holes
33.32±0.4
22.5
2×#4-40 UNC tapped holes
24.99±0.3
14.35±0.3
31.5
SERVOPACK end Serial data output connector (CN1)
4×φ4.2 holes
Nameplate2×φ4.2 holes
10
52±0.3
60
65±0.372
82±0.390
4×M5 tapped holes, depth 10
17-series connector model: 17LE-13150-27 (socket) by DDK Ltd.
CN2 Linear scale end Analog signal input
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in

●Linear Scale without Cable for Hall Sensor by Renishaw Serial Converter Unit Model:JZDP-A005-□□□
1
9
6
5
15
1
8
9
Pin No. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Case
/cos input (V1-) /sin input (V2-) Ref input (V0+) +5V 5Vs Empty Empty Empty cos input (V1+) sin input (V2+) /Ref input (V0-) 0V 0Vs Empty Inner (0V) Shield
SignalPin No. 1 2 3 4 5 6 7 8 9 Case
+5V S-phase output Empty Empty 0V /S-phase output Empty Empty Empty Shield
Signal
17-series connector model: 17LE-13090-27 (socket) by DDK Ltd.
SERVOPACK does not have the function to process Vq signals.
CN1 SERVOPACK end Serial data output
17-series connector model: 17LE-13150-27 (socket) by DDK Ltd.
CN2 Linear scale end Analog signal input
60 10
52±0.3
300±3065±0.372
82±0.390
NameplateLinear scale end Analog signal input connector (CN2)
4×φ4.2 holes2×φ4.2 holes
22.5
4×M5 tapped holes, depth 10
24.99±0.4
14.35±0.4
31.5
2×#4-40 UNC tapped holes
SERVOPACK end Serial data output connector (CN1)
Do not use empty pins. The linear scale (analog 1Vp-p output, D-sub 15-pin, male) by Renishaw Inc. can be directly connected. However, the BID and DIR signals are not connected. Use the linear scale end connector to change the zero point specifications of the linear scale.
Notes: 1. 2. 3.
68

69
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK
Do not use empty pins. The linear scale (analog 1Vp-p output, D-sub 15-pin, male) by Heidenhain Corp. can be directly connected. U-phase, V-phase, and W-phase input are internally pulled up at 10kΩ.
Notes: 1. 2. 3.
Pin No. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Case
cos input (A+) 0V sin input (B+) +5V Empty Empty /Ref input (R-) Empty /cos input (A-) 0V sensor /sin input (B-) 5V sensor Empty Ref input (R+) Empty Shield
SignalPin No. 1 2 3 4 5 6 7 8 9 Case
+5V S-phase output Empty Empty 0V /S-phase output Empty Empty Empty Shield
Signal
17-series connector model: 17JE-13090-27 (socket) by DDK. Ltd.
CN1 SERVOPACK end Serial data output
2×#4-40 UNC tapped holes
24.99±0.4
6052±0.3
65±0.3300±30
7282±0.390
10
22.5
1.5
2×φ4.2 holes 4×φ4.2 holes
3
14.35±0.4
Nameplate
Linear scale end Hall sensor signal input connector (CN3)
Linear scale end Analog signal input connector (CN2)
4×M5 tapped holes, depth 10
SERVOPACK end Serial data output connector (CN1)
Pin No. 1 2 3 4 5 6 7 8 9 Case
+5V U-phase input V-phase input W-phase input 0V Empty Empty Empty Empty Shield
Signal
17-series connector model: 17JE-13090 by DDK. Ltd.
CN3 Linear scale end Hall sensor signal input
17-series connector model: 17JE-13150-02 (D8C)(socket) by DDK. Ltd.
CN2 Linear scale end Analog signal input
●Linear Scale with Cable for Hall Sensor by Heidenhain Serial Converter Unit Model:JZDP-A006-□□□
9
6
5
1
1
8
9
15
1 6
95

Do not use empty pins. The linear scale (analog 1VP-P output, D-sub 15-pin, male) by Renishaw Inc. can be directly connected. However, the BID and DIR signals are not connected. U-phase, V-phase, and W-phase input are internally pulled up at 10kΩ.
Notes: 1. 2. 3.
Pin No. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Case
/cos input (V1-) /sin input (V2-) Ref input (V0+) +5V 5Vs Empty Empty Empty cos input (V1+) sin input (V2+) /Ref input (V0-) 0V 0Vs Empty Inner Shield
SignalPin No. 1 2 3 4 5 6 7 8 9 Case
+5V S-phase output Empty Empty 0V /S-phase output Empty Empty Empty Shield
Signal
17-series connector model: 17JE-13090-27 (socket) by DDK. Ltd.
CN1 SERVOPACK end Serial data output
2×#4-40 UNC tapped holes
24.99±0.4
6052±0.3
65±0.3300±30
7282±0.390
10
22.5
1.5
2×φ4.2 holes 4×φ4.2 holes
3
14.35±0.4
Nameplate
Linear scale end Hall sensor signal input connector (CN3)
Linear scale end Analog signal input connector (CN2)
4×M5 tapped holes, depth 10
59 1 9
158
1 6
956 1
SERVOPACK end Serial data output connector (CN1)
Pin No. 1 2 3 4 5 6 7 8 9 Case
+5V U-phase input V-phase input W-phase input 0V Empty Empty Empty Empty Shield
Signal
17-series connector model: 17JE-13090 by DDK. Ltd.
CN3 Linear scale end Hall sensor signal input
17-series connector model: 17JE-13150-02(D8C) (socket) by DDK. Ltd.
CN2 Linear scale end Analog signal input
●Linear Scale with Cable for Hall Sensor by Renishaw Serial Converter Unit Model:JZDP-A008-□□□
70

71
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK
Selecting Motor Force
J M
J1 ×
2
R1
NL
NM
Comparison with Rotary Motor
Drive Mechanism
Rotary Motor Linear Motor
Load Shaft Rotation Speed NL(r/min) Motor Speed NM(r/min)
Inertia Converted into Load Shaft
J1
Drive Torque by Load Shaft T1(N・m) Normal Force
FL(N)
Running Power PO(W)
Estimated Winding Temperature θC(℃)
Connected Motor Shaft TL(N・m)
Accel Torque TP(N・m) Decel Torque TS(N・m)
Required Torque Trms(N・m)
Accel Force FP(N)
Decel Force FS(N)
Required Force Frms(N)
Running Power PO(W)
Inertia Converted into Motor Shaft
JL
Drive Mechanism
Workpiece mass Table mass Coil Assembly mass Friction coefficiency Mechanical efficiency Acceleration
WW(kg) WT(kg) WM(kg) μ η α(m/s2)
Lead Workpiece mass Table mass Friction coefficiency Mechanical efficiency
PB(mm) WW(kg) WT(kg) μ η
VL(m/min) VL(m/min)
1/R
1000 × VL
R × NL
(WW+WT)× ×
2
PB
1000π PB
41
μ×(WW+WT)×9.8× μ×(WW+WT+WM)×9.8
FP=(WW+WT+WM)×α+FL
θC=(Frms/Km)2×Rth+θ
FS=(WW+WT+WM)×α-FL
η 2000π PB
FL×VL60
T1 × × R1
TP= +TL60×ta(JL+JM)×2×π×NM
TS=
TP
TST
TL
ta t c t d
FP
FST
FL
ta t c t d
-TL60×td(JL+JM)×2×π×NM
TTrms=
TP2×ta+TL2×tc+TS2×td
60TL×2×π×NM
η 1
TFrms=
FP2×ta+FL2×tc+FS2×td
Selection Example
TmT
ta t c t d
Load speed Workpiece mass Table mass Friction coefficiency Mechanical efficiency Feeding time Acceleration time 1 cycle time
VL = 120m/min WW = 1kg WT = 2kg μ = 0.2 η = 0.9 Tm = 0.4s t a = 0.02s T = 0.5s
①Normal load force=0.2×(1+2)9.8=5.88(N) ②Load accel force=(1+2)×120/60/0.02+5.88=306(N) From ②, select SGLGW-40A365A whose peak force is 420N Specifications of SGLGW-40A365A Continuous force : 140N Peak force: 420N Moving coil mass: 0.91kg Motor constant: 13.5 (N/ W)
・Temporary Selection
③Normal force=0.2×(1+2+0.91)×9.8/0.9=8.5(N) ④Accel force=(1+2+0.91)×120/60/0.02+8.5=400(N)<Peak force (applicable) ⑤Decel force=(1+2+0.91)×120/60/0.02-8.5=383(N)<Peak force (applicable) ⑥Required force= =111(N)<Rated force (applicable)
⑦Estimated winding temperature: (111/13.5)2×0.65+25=69(℃)<130(℃) (applicable)
・Servomotor Checking
4002×0.02+8.5
2×0.36+383
2×0.02
0.5
Thermal resistance: 0.65(K/W) (Ambient temperature(θ): 25℃)
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in

SGLGW-30A050B SGLGW-30A080B SGLGW-40A140B SGLGW-40A253B SGLGW-60A140B SGLFW-20A090A SGLFW-20A120A SGLFW-35A120A SGLGW-40A365B SGLGW-60A253B SGLFW-35A230A SGLTW-20A170A SGLGW-60A365B SGLFW-50A200B SGLTW-35A170A SGLTW-35A170H SGLTW-50A170H SGLTW-20A320A SGLGW-90A200A SGLFW-50A380B SGLFW-1ZA200B SGLTW-20A460A SGLTW-35A320A SGLTW-35A320H SGLTW-50A320H SGLGW-90A370A SGLFW-1ZA380B SGLTW-35A460A SGLTW-40A400B SGLGW-90A535A SGLTW-40A600B SGLTW-80A400B SGLTW-80A600B SGLFW-35D120A SGLFW-35D230A SGLFW-50D200B SGLFW-50D380B SGLFW-1ZD200B SGLTW-35D170H SGLTW-50D170H SGLFW-1ZD380B SGLTW-50D320H SGLTW-35D320H SGLTW-40D400B SGLTW-40D600B SGLTW-80D400B SGLTW-80D600B
Single-phase 200 to 230VAC,50W Single-phase 200 to 230VAC,100W
Single-phase 200 to 230VAC,200W Single-phase 200 to 230VAC,400W
Three-phase 200 to 230VAC,450W
Three-phase 200 to 230VAC,750W Three-phase 200 to 230VAC,1.0kW Three-phase 200 to 230VAC,1.5kW Three-phase 200 to 230VAC,2.0kW
Three-phase 200 to 230VAC,3.0kW
Three-phase 200 to 230VAC,5.0kW Three-phase 200 to 230VAC,7.5kW Three-phase 380 to 480VAC,450W
Three-phase 380 to 480VAC,1.0kW Three-phase 380 to 480VAC,1.5kW
Three-phase 380 to 480VAC,2.0kW
Three-phase 380 to 480VAC,3.0kW
Three-phase 380 to 480VAC,5.0kW Three-phase 380 to 480VAC,7.5kW
SGDH-A5AE SGDH-01AE
SGDH-02AE SGDH-04AE
SGDH-05AE
SGDH-08AE SGDH-10AE SGDH-15AE SGDH-20AE
SGDH-30AE
SGDH-50AE SGDH-75AE SGDH-05DE
SGDH-10DE SGDH-15DE
SGDH-20DE
SGDH-30DE
SGDH-50DE SGDH-75DE
Servodriver and Servomotor
Name Servodriver
TypeMax. ApplicableMotor Type
Specifications(Input Voltage, Capacity)
U V W
SGDH SERVOPACK
●Pulse Train Reference Input / Analog Voltage Reference Input
Digital Operator
Sets each user Parameter and displays the command status and alarms. Can also be used for communications with a PC.
MP910, MP920, and other motion controllers.
Personal Computer
Host Controller
Connection Cable Type:JZSP-CMS02
Type JUSP-OP02A-2
CN3
CN8
CN1
CN2
Power Ground Line
4P4P
Serial Converter Unit
CN5
Cable
Analog Monitor
Ordering Reference
Can be connected to a YASKAWA host controller
Coreless Linear Servomotor
Hall Sensor Unit
(E)
Cable
Cable for SERVOPACK Signal I/O
For high-speed reference pulse input
(D)
(A) (F)
Connector Cable
(B)
Motor Cable
(C)
(G)
Following devices are prepared by user. ・Linear length measuring system ・Linear guide
(H)
72

73
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK
SpecificationsName Type
Name Type Specifications
Option
Cables and Connectors
With connection cable(1m) 1m 1.5m 2m Single-phase 250 VAC,6A Single-phase 250 VAC,10A Three-phase 480 VAC,7A Three-phase 480 VAC,16A Three-phase 480 VAC,30A Three-phase 440 VAC,50A Three-phase 440 VAC,64A Three-phase 480 VAC,7A Three-phase 480 VAC,16A Three-phase 480 VAC,35A
JUSP-OP02A-2 JZSP-CMS00-1 JZSP-CMS00-2 JZSP-CMS00-3 FN2070-6/07 FN2070-10/07 FN258L-7/07 FN258L-16/07 FN258L-30/07 FMAC-0934-5010 FMAC-0953-6410 FN258L-7/07 FN258L-16/07 FS5559-35-33
Digital Operator
Noise Filter (Recommended)
Connector Terminal Conversion Unit Cable with connector on only Servodriver Side
Connector Kit (for CN1) Cable with Connectors on Both Ends Motor Cable (for Main Circuit)
Linear Servomotor Main Circuit Cables
Terminal block and connection cable 0.5m 1m 2m 3m 1m 3m 5m 10m 15m 20m Applicable linear Servomotor type SGLGW-30 SGLGW-40 SGLGW-60 SGLFW-20 SGLFW-35 Applicable linear Servomotor type SGLGW-90 SGLFW-50 SGLFW-1Z SGLTW-20 SGLTW-35 SGLTW-50 Applicable linear Servomotor type SGLTW-40 SGLTW-80 1m 3m 5m 10m 15m 20m 1m 3m 5m 10m 15m 20m
JUSP-TA50P JZSP-CK101-1 JZSP-CK101-2 JZSP-CK101-3 JZSP-CK19 JZSP-CLP70-01 JZSP-CLP70-03 JZSP-CLP70-05 JZSP-CLP70-10 JZSP-CLP70-15 JZSP-CLP70-20 JZSP-CLN11-01(1m) JZSP-CLN11-03(3m) JZSP-CLN11-05(5m) JZSP-CLN11-10(10m) JZSP-CLN11-15(15m) JZSP-CLN11-20(20m) JZSP-CLN21-01(1m) JZSP-CLN21-03(3m) JZSP-CLN21-05(5m) JZSP-CLN21-10(10m) JZSP-CLN21-15(15m) JZSP-CLN21-20(20m) JZSP-CLN39-01(1m) JZSP-CLN39-03(3m) JZSP-CLN39-05(5m) JZSP-CLN39-10(10m) JZSP-CLN39-15(15m) JZSP-CLN39-20(20m) JZSP-CLN14-01 JZSP-CLN14-03 JZSP-CLN14-05 JZSP-CLN14-10 JZSP-CLN14-15 JZSP-CLN14-20 JZSP-CLN15-01 JZSP-CLN15-03 JZSP-CLN15-05 JZSP-CLN15-10 JZSP-CLN15-15 JZSP-CLN15-20
(A) Connector for I/O Signals (B) Serial Converter Unit (C) Servodriver Terminal Motor
Digital Operator Cable
↑↓
CN2↑↓
CN1
Required only when using JUSP-OP02A-1, the digital operator for Σ Series.
SERVOPACK end
Applicable linear servomotor type:SGL□W-□D for 200 VAC
Linear servomotor end
SERVOPACK end
Linear servomotor end
Applicable linear servomotor type:SGL□W-□D for 400 VAC
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in

SpecificationsName TypeCable for Digital Operator Cable for PC Cable for Analog Monitor Connector for High-speed Reference Pulse Input Special Cable for Renishaw Linear Encoders
Special Cable for Hall Sensor
Attached to digital operator (JUSP-OP02A-2)
2m D-SUB 9-pin
1m Manufactured by Sumitomo 3M Ltd. receptacle:10126-3000VE case:10326-52A0-008 1m D-SUB 15-pin 3m D-SUB 15-pin 5m D-SUB 15-pin 10m D-SUB 15-pin 15m D-SUB 15-pin 1m 3m 5m 10m 15m
-
JZSP-CMS02
JZSP-CA01 or DE9404559 - - JZSP-CLL00-01 JZSP-CLL00-03 JZSP-CLL00-05 JZSP-CLL00-10 JZSP-CLL00-15 JZSP-CLL10-01 JZSP-CLL10-03 JZSP-CLL10-05 JZSP-CLL10-10 JZSP-CLL10-15
(D) Setting Device (E) (F) (G) Serial Converter Unit Linear Encoder (H) Serial Converter Unit Hall Sensor
CN3↑↓
CN5
CN8
↑↓
↑↓
74

75
SGLGW-30A050B SGLGW-30A080B SGLGW-40A140B SGLGW-40A253B SGLGW-60A140B SGLFW-20A090A SGLFW-20A120A SGLFW-35A120A SGLGW-40A365B SGLGW-60A253B SGLFW-35A230A SGLTW-20A170A SGLGW-60A365B SGLFW-50A200B SGLTW-35A170A SGLTW-35A170H SGLTW-50A170H SGLTW-20A320A SGLGW-90A200A SGLFW-50A380B SGLFW-1ZA200B SGLTW-20A460A SGLTW-35A320A SGLTW-35A320H SGLTW-50A320H SGLGW-90A370A SGLFW-1ZA380B SGLTW-35A460A SGLTW-40A400B SGLGW-90A535A SGLTW-40A600B SGLTW-80A400B SGLTW-80A600B SGLFW-35D120A SGLFW-35D230A SGLFW-50D200B SGLFW-50D380B SGLFW-1ZD200B SGLTW-35D170H SGLTW-50D170H SGLFW-1ZD380B SGLTW-50D320H SGLTW-35D320H SGLTW-40D400B SGLTW-40D600B SGLTW-80D400B SGLTW-80D600B
Single-phase 200 to 230VAC,50W Single-phase 200 to 230VAC,100W
Single-phase 200 to 230VAC,200W Single-phase 200 to 230VAC,400W
Three-phase 200 to 230VAC,450W
Three-phase 200 to 230VAC,750W Three-phase 200 to 230VAC,1.0kW Three-phase 200 to 230VAC,1.5kW Three-phase 200 to 230VAC,2.0kW
Three-phase 200 to 230VAC,3.0kW
Three-phase 200 to 230VAC,5.0kW Three-phase 200 to 230VAC,7.5kW Three-phase 380 to 480VAC,450W
Three-phase 380 to 480VAC,1.0kW Three-phase 380 to 480VAC,1.5kW
Three-phase 380 to 480VAC,2.0kW
Three-phase 380 to 480VAC,3.0kW
Three-phase 380 to 480VAC,5.0kW Three-phase 380 to 480VAC,7.5kW
SGDH-A5AE SGDH-01AE
SGDH-02AE SGDH-04AE
SGDH-05AE
SGDH-08AE SGDH-10AE SGDH-15AE SGDH-20AE
SGDH-30AE
SGDH-50AE SGDH-75AE SGDH-05DE
SGDH-10DE SGDH-15DE
SGDH-20DE
SGDH-30DE
SGDH-50DE SGDH-75DE
Servodriver and Servomotor
Name ServodriverType
Max. ApplicableMotor Type
Specifications(Input Voltage, Capacity)
U V W
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK
Digital Operator
Sets each user Parameter and displays the command status and alarms. Can also be used for communications with a PC.
MP910, MP920, and other motion controllers.
Personal Computer
Host Controller
Connection Cable Type:JZSP-CMS02
Type JUSP-OP02A-2
CN3
CN6B
CN6A
CN1
CN2
Power Ground Line
4P4P
Serial Converter Unit
CN5
Cable
Analog Monitor
Ordering Reference
Can be connected to a YASKAWA host controller
Coreless Linear Servomotor
Hall Sensor Unit
(E)
Cable
Install a Terminator on the last SERVOPACK
Cable for SERVOPACK Signal I/O
(D)
(A)
(F)
(F)
Connector Cable
(B)
Motor Cable
(C)
(G)
(H)
Following devices are prepared by user. ・Linear length measuring system ・Linear guide
SGDH SERVOPACK
●MECHATROLINK Communication

SpecificationsName Type
Name Type Specifications
Option
Cables and Connectors
With connection cable(1m) 1m 1.5m 2m Single-phase 250 VAC,6A Single-phase 250 VAC,10A Three-phase 480 VAC,7A Three-phase 480 VAC,16A Three-phase 480 VAC,30A Three-phase 440 VAC,50A Three-phase 440 VAC,64A Three-phase 480 VAC,7A Three-phase 480 VAC,16A Three-phase 480 VAC,35A
JUSP-OP02A-2 JZSP-CMS00-1 JZSP-CMS00-2 JZSP-CMS00-3 FN2070-6/07 FN2070-10/07 FN258L-7/07 FN258L-16/07 FN258L-30/07 FMAC-0934-5010 FMAC-0953-6410 FN258L-7/07 FN258L-16/07 FS5559-35-33
Digital Operator
Noise Filter (Recommended)
Connector Terminal Conversion Unit Cable with connector on only Servodriver Side
Connector Kit (for CN1) Cable with Connectors on Both Ends Motor Cable (for Main Circuit)
Linear Servomotor Main Circuit Cables
Terminal block and connection cable 0.5m 1m 2m 3m 1m 3m 5m 10m 15m 20m Applicable linear Servomotor type SGLGW-30 SGLGW-40 SGLGW-60 SGLFW-20 SGLFW-35 Applicable linear Servomotor type SGLGW-90 SGLFW-50 SGLFW-1Z SGLTW-20 SGLTW-35 SGLTW-50 Applicable linear Servomotor type SGLTW-40 SGLTW-80 1m 3m 5m 10m 15m 20m
JUSP-TA50P JZSP-CK101-1 JZSP-CK101-2 JZSP-CK101-3 JZSP-CK19 JZSP-CLP70-01 JZSP-CLP70-03 JZSP-CLP70-05 JZSP-CLP70-10 JZSP-CLP70-15 JZSP-CLP70-20 JZSP-CLN11-01(1m) JZSP-CLN11-03(3m) JZSP-CLN11-05(5m) JZSP-CLN11-10(10m) JZSP-CLN11-15(15m) JZSP-CLN11-20(20m) JZSP-CLN21-01(1m) JZSP-CLN21-03(3m) JZSP-CLN21-05(5m) JZSP-CLN21-10(10m) JZSP-CLN21-15(15m) JZSP-CLN21-20(20m) JZSP-CLN39-01(1m) JZSP-CLN39-03(3m) JZSP-CLN39-05(5m) JZSP-CLN39-10(10m) JZSP-CLN39-15(15m) JZSP-CLN39-20(20m) JZSP-CLN14-01 JZSP-CLN14-03 JZSP-CLN14-05 JZSP-CLN14-10 JZSP-CLN14-15 JZSP-CLN14-20
(A) Connector for I/O Signals (B) Serial Converter Unit (C)
Digital Operator Cable
CN2↑↓
CN1
Required only when using JUSP-OP02A-1, the digital operator for Σ Series.
Servodriver Terminal Motor
↑↓
SERVOPACK end
Applicable linear servomotor type:SGL□W-□D for 200 VAC
Linear servomotor end
1m 3m 5m 10m 15m 20m
JZSP-CLN15-01 JZSP-CLN15-03 JZSP-CLN15-05 JZSP-CLN15-10 JZSP-CLN15-15 JZSP-CLN15-20
SERVOPACK end
Linear servomotor end
Applicable linear servomotor type:SGL□W-□D for 400 VAC
1N=0.2276 lb=0.102kgf 1kg=2.232 lb 1mm=0.03937 in
76

77
Outline
Linear Servomotor
200V
Linear Servomotor
400V
SERVOPACK
SpecificationsName TypeCable for Digital Operator Cable for PC Cable for Analog Monitor Cable for MECHATROLINK Communication Terminator for MECHATROLINK Communication Special Cable for Renishaw Linear Encoders Special Cable for Hall Sensor
Attached to digital operator (JUSP-OP02A-2)
2m D-SUB 9-pin
1m 0.3m 0.5m With connectors on both ends 1.0m 1m D-SUB 15-pin 3m D-SUB 15-pin 5m D-SUB 15-pin 10m D-SUB 15-pin 15m D-SUB 15-pin 1m 3m 5m 10m 15m
-
JZSP-CMS02
JZSP-CA01 or DE9404559 JEPMC-W6000-A3 JEPMC-W6000-A5 JEPMC-W6000-01
JEPMC-W6020 JZSP-CLL00-01 JZSP-CLL00-03 JZSP-CLL00-05 JZSP-CLL00-10 JZSP-CLL00-15 JZSP-CLL10-01 JZSP-CLL10-03 JZSP-CLL10-05 JZSP-CLL10-10 JZSP-CLL10-15
(D) Setting Device (E) (F) (G) Serial Converter Unit Linear Encoder (H) Serial Converter Unit Hall Sensor
CN3↑↓
CN5
CN6A
CN6B
↑↓
↑↓

IRUMA BUSINESS CENTER480, Kamifujisawa, Iruma, Saitama 358-8555, JapanPhone 81-42-962-5696 Fax 81-42-962-6138
YASKAWA ELECTRIC AMERICA, INC.2121 Norman Drive South, Waukegan, IL 60085, U.S.A.Phone 1-847-887-7000 Fax 1-847-887-7370
MOTOMAN INC. HEADQUARTERS805 Liberty Lane West Carrollton, OH 45449, U.S.A.Phone 1-937-847-6200 Fax 1-937-847-6277
YASKAWA ELETRICO DO BRASIL COMERCIO LTD.A.Avenida Fagundes Filho, 620 Bairro Saude-Sao Paulo-SP, Brazil CEP: 04304-000Phone 55-11-5071-2552 Fax 55-11-5581-8795
YASKAWA ELECTRIC EUROPE GmbHAm Kronberger Hang 2, 65824 Schwalbach, GermanyPhone 49-6196-569-300 Fax 49-6196-569-398
Motoman Robotics Europe ABBox 504 S38525 Torsas, SwedenPhone 46-486-48800 Fax 46-486-41410
Motoman Robotec GmbHKammerfeldstraβe 1, 85391 Allershausen, GermanyPhone 49-8166-90-100 Fax 49-8166-90-103
YASKAWA ELECTRIC UK LTD.1 Hunt Hill Orchardton Woods Cumbernauld, G68 9LF, United KingdomPhone 44-1236-735000 Fax 44-1236-458182
YASKAWA ELECTRIC KOREA CORPORATIONKfpa Bldg #1201, 35-4 Youido-dong, Yeongdungpo-Ku, Seoul 150-010, KoreaPhone 82-2-784-7844 Fax 82-2-784-8495
YASKAWA ELECTRIC (SINGAPORE) PTE. LTD.151 Lorong Chuan, #04-01, New Tech Park Singapore 556741, SingaporePhone 65-6282-3003 Fax 65-6289-3003
YASKAWA ELECTRIC (SHANGHAI) CO., LTD.No.18 Xizang Zhong Road. Room 1805, Harbour Ring Plaza Shanghai 20000, ChinaPhone 86-21-5385-2200 Fax 86-21-5385-3299
YATEC ENGINEERING CORPORATION4F., No.49 Wu Kong 6 Rd, Wu-Ku Industrial Park, Taipei, TaiwanPhone 886-2-2298-3676 Fax 886-2-2298-3677
YASKAWA ELECTRIC (HK) COMPANY LIMITEDRm. 2909-10, Hong Kong Plaza, 186-191 Connaught Road West, Hong KongPhone 852-2803-2385 Fax 852-2547-5773
BEIJING OFFICERoom No. 301 Office Building of Beijing International Club, 21Jianguomenwai Avenue, Beijing 100020, ChinaPhone 86-10-6532-1850 Fax 86-10-6532-1851
TAIPEI OFFICE9F, 16, Nanking E. Rd., Sec. 3, Taipei, TaiwanPhone 886-2-2502-5003 Fax 886-2-2505-1280
SHANGHAI YASKAWA-TONGJI M & E CO., LTD.27 Hui He Road Shanghai China 200437Phone 86-21-6553-6060 Fax 86-21-5588-1190
BEIJING YASKAWA BEIKE AUTOMATION ENGINEERING CO., LTD.30 Xue Yuan Road, Haidian, Beijing P.R. China Post Code: 100083Phone 86-10-6233-2782 Fax 86-10-6232-1536
SHOUGANG MOTOMAN ROBOT CO., LTD.7, Yongchang-North Street, Beijing Economic Technological Investment & Development Area, Beijing 100076, P.R. ChinaPhone 86-10-6788-0551 Fax 86-10-6788-2878
YASKAWA
YASKAWA ELECTRIC CORPORATION
Printed in Japan December 2003 01-3 1Z
LITERATURE NO. KAE-S800-39.10B3
03-10④
In the event that the end user of this product is to be the military and said product is to be employed in any weapons systems or the manufacture thereof, the export will fall under the relevant regulations as stipulated in the Foreign Exchange and Foreign Trade Regulations. Therefore, be sure to follow all procedures and submit all relevant documentation according to any and all rules, regulations and laws that may apply.
Specifications are subject to change without notice for ongoing product modifications and improvements.
© 2001-2003 YASKAWA ELECTRIC CORPORATION. All rights reserved.
Σ SERIESLinear