-
1
Chapter 1Principle and Characteristics of Induction
MotorsChapter 2Inverter Principle and CharacteristicsChapter
3Operation CharacteristicsChapter 4Inverter Drive Units
Selection
Chapter 5Inverter Functions and AdvantagesChapter 6Inverter
Drives Precautions Chapter 7Harmonics, Noise & Surge
VoltageChapter 8Maintenance and Inspection
-
2
Market of General purpose Inverters
Introduction
-
3
109109109109
127127127127
144144144144151151151151
166166166166
120120120120
109109109109118118118118
98989898
93939393
840751767
715644
0000
50505050
100100100100
150150150150
200200200200
250250250250
300300300300
350350350350
2002200220022002 2003200320032003 2004200420042004
2005200520052005 2006200620062006 2007200720072007
2008200820082008
0000
100100100100
200200200200
300300300300
400400400400
500500500500
600600600600
700700700700
800800800800
900900900900
1000100010001000
202225
262 260
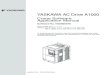
Drives Industry Market Growth in Japan
Actual Estimate
Hu
ndred
millio
n ye
n
U
n
i
t
s
x
1
0
,
0
0
0
Drives up to 75 kW
Hundred million
Tens of thousands
ExportDomestic
23% 24%
27% 26%
3%
51%
15%
31%up to 0.75 kW0.75 kW to 4 kW4 kW to 15 kW15 kW to 75 kW
Units Amount
Shipments by capacity in 2006
Data from JEMA
286
-
4
Yaskawa14.1%
A13.0%
B12.8%
C12.5%
D11.4%
E8.6%
G2.8%
F7.8%
H1.7%
Others15.2%
\ 395.9 billion2006
17.4%
15.8%12.8%
17.0%11.0%
Japan
USAEurope
China Asia
*Data has been gathered and analyzed by Yaskawa.
No.1 Global Share(fiscal year 2006)
Global Share by Region
-
5
Yaskawa Drives BusinessAs a drives manufacturer, we provide
overwhelmingly
powerful products and application solutions.
Drives SpecialistsOur vast engineering skills, we have earned us
the reputation
among our customers as specialists who possess
progressive technology and build long-
lasting cooperative relationships.
74Worlds 1st Transistor InverterVS-616T
747474
74 808080
80 909090
90858585
85 000000
00959595
95 050505
05
85Worlds 1st Digital ControlVS-616H
79Worlds 1st Vector ControlVS-626TV
88Worlds 1st IGBT Low-noise InverterVS-616GLN
94Worlds 1st Ultra-compact ASIPM InverterVS mini C
95Worlds 1st Vector Control General-purpose InverterVS-616G5
00Worlds 1st 3-level Control General-purpose InverterVarispeed
G7
06Worlds 1st Matrix Converter DriveVarispeed AC
VS
VSVS
VS-
--
-616H
616H616H
616H
VS
VSVS
VS-
--
-616G
616G616G
616G
VS
VSVS
VS-
--
-616G
616G616G
616G
VS
VSVS
VS-
--
-616G3
616G3616G3
616G3
VS
VSVS
VS-
--
-616H3
616H3616H3
616H3
VS
VSVS
VS-
--
-606PC3
606PC3606PC3
606PC3
VS
VSVS
VS-
--
-606V7
606V7606V7
606V7
VS mini J7
VS mini J7VS mini J7
VS mini J7
Varispeed F7S
Varispeed F7SVarispeed F7S
Varispeed F7S
Varispeed L7
Varispeed L7Varispeed L7
Varispeed L7
Varispeed
Varispeed Varispeed
Varispeed
V7 pico
V7 picoV7 pico
V7 pico
Varispeed F7
Varispeed F7Varispeed F7
Varispeed F7
S
a
l
e
s
V1000Release
-
6
YASKAWA ELECTRIC UK LTD. (YGB)YASKAWA ELECTRIC EUROPE GmbH
(YEG)
YASKAWA ELECTRIC AMERICA,INC. (YEA)Buffalo Grove Facility
Global Sales Offices and Production Facilities
YASKAWA ELECTRIC AMERICA,INC. (YEA)New Berlin Wisconsin Panel
Facility
YASKWA ELECTRIC KOREA CORPORATION (YEK)
YASKAWA ELECTRIC (HK) COMPANY LIMITED (YHK)
YASKAWA ELECTRIC (SHANGHAI) CO.,LTD. (SHANGHAI)
SHANGHAI YASKWA DRIVE CO.,LTD. (SYD)
Yaskawa Electric Taiwan Corporation (YTW)
YASKAWA ELECTRIC (SINGAPORE) PTE.LTD. (YSP)
Inverter Plant (V)
YASKAWA ELECTRIC CORPORATION (YEC)
YASKAWA ELETRICO DO BRASIL COMERCIO LTD.A. (YEB)
: Sales office: Production facility
-
7
Chapter 1Principle and Characteristics
of Induction Motors
-
8
Motors
Motors for motive power
Motors for dynamic response
DC motors (series, shunt, compound)
AC motors
Induction motors(Squirrel-cage, wound rotor type)
Synchronous motors(Magnet type, field winding type)
Motors with eddy-current coupling(VS-MOTOR)
ServomotorsDC servomotors
AC servomotors(SM, IM types)
Types of Motors
-
9
Configuration
Rotor end ring
SecondaryConductor
(b) Squirrel-cage Rotor(Excluding Iron Core)
(a) Configuration of Squirrel-cage Induction motor(Example of
Totally-enclosed Externally-cooled Type)
Outputshaft
frame box
Externalfan
Bearing
Internalfan
Rotor End ring
Fan coverRotor
Iron core
Center height(Motor frame No.)
Bracket
-
10
Magnetic field (Flux density B (wb/m2) )
N
SBBBB
FFFF
IIII
Force(F)Force(F)Force(F)Force(F)
Magnetic Magnetic Magnetic Magnetic
Field(B)Field(B)Field(B)Field(B)
Current(I)Current(I)Current(I)Current(I)
F
I
B
Force(F)Force(F)Force(F)Force(F)
Magnetic Magnetic Magnetic Magnetic
Field(B)Field(B)Field(B)Field(B)
Current(I)Current(I)Current(I)Current(I)
Flemings Right-hand Rule Flemings Left-hand Rule
-
11
ARAGOs Disc(Disc rotates following magnet rotation.)
Induction Effect of Rotating Magnetic Field
Rotary Shaft
Principle
N
S
Permanent MagnetIron Disc
S
N
NS
NSFlux
-
12
Current Direction
Direction of Magnetic Flux
Right Screw
A. Right hand screw Rule
Current Direction
B. Coil Current and Magnetic Flux Directions
Direction of Magnetic Flux
Beginning of Coil Winding
End of Coil Winding
Magnetic Flux Generated by CurrentDirection of Mag. flux from
front to back of paper face
Direction of Mag. flux from back to front of paper face
-
13
Three-phase motors use three-phase alternating current to create
a rotating magnetic field.
U
V
W
U
Phase U Phase V Phase W
VWU
V W
0 pi 2pi
Principle of Rotating Magnetic Field (2 Pole)
U, V, W : START of Coil
U,V,W: END of Coil
1 Cycle
3-phase AC (Current)
Direction of Magnetic
Field
(a) Three-phase Alternating Current (Power Supply) and Magnetic
Field Direction
Induction Motor
-
14
P o w er S u pp ly F re quency (f) N o . o f P o les
(P )
N o . o f C o ils pe r
P hase 50 H z 60 H z
2 1 3 000 3 600
4 2 1 500 1 800
6 3 1 000 1 200
8 4 7 50 9 00
S NS N
N S2p 4p
8p6p(a) Synchronous Speed (min-1)
(b) Number of Poles (p)
Number of Poles and Synchronous Speed
S N
S N
N S
S NN
NNS
S
S
-
15
Rotating Magnetic Field of a 4-pole Motor
(a) Coil Arrangement(b) Three-phase
Alternating Current
U
V
W
Phase U Phase V Phase W
-
16
The above equation can be changed into the following one.
Therefore:
Synchronous SpeedThe speed at which the magnetic field rotates
is called synchronous speed (NS), which depends on the number of
magnetic poles p , that depends on the configuration of the motor
stator winding, and power supply frequency f .
Rotating SpeedRotor speed N ( min-1 ) is a little slower than
synchronous speed is a little slower than synchronous speed is a
little slower than synchronous speed is a little slower than
synchronous speed Ns . This amount is called . This amount is
called . This amount is called . This amount is called
slipslipslipslip, which is defined as follows:, which is defined as
follows:, which is defined as follows:, which is defined as
follows:
S
S
NNN
S
=
( )SSNN = 1
(((( ))))N fp
S==== 120 1
pfN S 120= NS : Synchronous speed ( min-1 )
f : Power supply frequency (Hz)( min-1 )
( min-1 )
Ns : Characteristic value dependingon motor specifications
s : Value varying on the load size
Induction Motor Speeds
-
17
360018000[With 4 poles at 60 Hz ( min-1 )] - 1800
Characteristics
Torque
Rated Current
Stalling Torque
Rated Torque
Slip (Rating)
Motoring Area
Rated Speed
( PLU GGING )
No-load Current
Current (%)
Starting Current
Starting Torque
(Induction Generator)Regenerative Braking AreaReverse Phase
Braking Area
Ns
-
18
-1
Control Method
Load Torque
The intersection of the motor generating torque and the load
torque becomes the operation speed.
To change the induction motor speed
Changing p(Pole change motor)
Changing s(Primary voltage control)
Changing s(Secondary resistance control)
Changing f
Number of Poles Large
Secondary Resistance Large
Voltage Small Frequency Small
(Primary frequency controlinverter drives)
-
19
2. Applied ModificationGeared motors Output shaft torque
increased
Brake motorsQuick brakeAG brake motors
Explosionproof motorsIncreased safety explosionproof
motorsExplosionproof motors
Types of Inverter Motors
Fan Cover External FanExternal Fan (-K)
Pulse Generator (-M)
1. Inverter Drive Motors
FEQ-X, FEFFEK-I FEK-IK FEK-IKM
(With electric fan) (With electric fan and PG)
Totally-enclosed
Model EEK-IM(With PG)
Totally-enclosedFan-cooled Type
Totally-enclosedFan-cooled Type
Totally-enclosed Fan-cooled Type
-
20
The following shows the relation between the magnetic flux,
voltage and frequency.
ExampleWhen speed is reduced to the half (60 Hz to 30 Hz),
according to the above equation, set the inverter output voltage
and output frequency so that the magnetic flux will be
constant.
ttanCons)Hz(30)V(100
)Hz(60)V(200
fV
===
200
100
0 30 60Frequency (Hz)
In actual operation, voltage at low frequency must be increased
by 150% to 200% in order to compensate for voltage drop in the
motor.
Motor Characteristics at Inverter Drives
Voltage (V)
Magnetic Flux Voltage VFrequency f = Constant
-
21
The following shows the equation of motor rated torque.
ExampleIn case of a motor of 7.5 kW, 4 poles, rated speed 1740
min-1
Rated torque TM 974 Motor rated output P (kW)
Rated speed N (min-1) (kgfm)
Rated torque TM 974 7.51740 (kgfm) 4.19
Rated torque TM Motor rated output P (W)
Rated speed N (min-1) (Nm)602pi
Rated torque TM 7.5103
1740 (Nm) 41.2602pi
Motor Rated Torque
-
22
When load torque variesAs the load torque becomes greater, the
motor speed decreases (or slip becomes greater).
At this time, the greater the load torque the greater the motor
current.
When the motor applied voltage variesThe motor generating torque
is in proportion to the square of voltage.As the voltage becomes
smaller, the speed decreases (or slip becomes greater).
Voltage Fluctuation and Speed Changes
Load Fluctuation and Speed Changes
Motor Speed VariationOutput Torque
Speed
Load Large
Load Small
Speed
Voltage Large
Load Constant
T
o
r
q
u
e
Voltage Small
T
o
r
q
u
e
-
23
Inverter output voltage does not exceed power supply
voltage.
Therefore, output voltage becomes constant in the range
exceeding frequency 50 Hz or 60 Hz (base frequency).The following
equation shows the relation between motor voltage (V), frequency
(f) and torque.
IfV
KTorque T = K ConstantConstantConstantConstant
CurrentCurrentCurrentCurrent
Since only frequency is changed, torque is reduced in inverse
proportion to frequency if the motor current value is the same as
shown in the above equation.
This area is called constant output area.
Operations Exceeding 50Hz or 60Hz
-
24
Chapter 2Inverter Principle and Characteristics
-
25
Rectifier CircuitConverter Section
DC IntermediateCircuit
Smoothing Circuit Section
Invert ConversionCircuit
Inverter Section
Commercial Commercial Commercial Commercial
PowerPowerPowerPower
AC Power
VariableVariableVariableVariable
FrequencyFrequencyFrequencyFrequency
/Variable Voltage AC/Variable Voltage AC/Variable Voltage
AC/Variable Voltage AC
Control Circuit Section
M
Motor
VVVF
Inverter Configuration
AC Power
VoltageVoltageVoltageVoltage
CurrentCurrentCurrentCurrent
VoltageVoltageVoltageVoltage
CurrentCurrentCurrentCurrent
VoltageVoltageVoltageVoltage
CurrentCurrentCurrentCurrent
-
26
Voltage
Current
Voltage
Current
Voltage
Current
IMUVW
Power source
Contactinput
ForwardReverse
Multi-functioninput
Analog input
Pulse train input
I
n
p
u
t
s
i
g
n
a
l
O
u
t
p
u
t
s
i
g
n
a
l
Actual inverter circuit
Diode Transister
Register
Capacitor
Digitaloperator
Pulse train output
Analog monitor
Multi-unction contact output
Multi-function analog output
Contact output
Open collector output
Fault output
RST
SC
Digitaloperator
AC DC AC
-
27
0
Current wave
R
S4
S3S1
S2
DC Power Supply
S1 S4 ON S1 S4 ON
S2 S3 ON
How to Make AC
ON ON
ON
SwitchesS1, S4
S2, S3
Ed
Principle of Single-phase Inverter
+Ed
-Ed
-
28
Basic Circuit of 3-phase Inverter
S1S2S3S4S5S6
U-V
V-W
W-U
0 60 120 180 240 300 360 60 120 180 240 300
MotorU
WV
PPPP
NNNN
S3S1 S5
S4 S6 S2
DCpowersource
Principle of generating 3-phase alternating current
SwitchingPattern
AC Output
a
Interval a
-
29
IM
Motor
3-phase AC
EdDC Power Supply
Basic Circuit of Transistor Inverter
+Ed
-
30
~
P
N
C
MC
R
D3D2D1
D6D5D4
V
V
Ed
Vs
In-rush Current Suppression Resistor
Vs1.35Vspi
23dE =
Converter Sectionand In-rush Current Suppression
V
-
31
Name Diode Thyristor GTO
(Gate Tum Off Thyristor)
Bipolar Power Transistor
IGBT (Insulated Gate Bipolar
Tr.)
Power MOS FET (Power Metal Oxide
Semiconductor. Field Effect Tr.)
S
y
m
b
o
l
C
h
a
r
a
c
t
e
r
i
s
t
i
c
s
V
o
l
t
a
g
e
,
C
u
r
r
e
n
t
W
a
v
e
f
o
r
m
F
e
a
t
u
r
e
s
,
A
p
p
l
i
c
a
t
i
o
n
General high-voltage, large-current rectifier circuits
High-voltage, large-current converter section Inverter section,
chopper section attached with commutation circuit
High-voltage, large-current inverter section, chopper
section
Medium voltage, medium current high-speed switching, inverter
section
Medium voltage, medium current high-speed switching, inverter
section
Low-voltage, small- current high-speed switching, inverter
section
Main Semiconductor Power Elements Used for Inverters
Anode
Cathode
Gate
Collector
Base
Emitter
Drain
Gate
Source
-
32
Control Method Output Frequency Features
PAM MethodPAM MethodPAM MethodPAM Method
(Pulse Amplitude Modulation)
Voltage control is needed for the converter.
Motor current distortion is excessive, resulting in torque
ripple.
PWM MethodPWM MethodPWM MethodPWM Method
(Sinusoidal Wave Approximate)
PWM: Pulse Width Modulation
When the above Output power frequency is 60 Hz, the number of
pulses per cycle is 14. Therefore, carrier wave (carrier frequency)
is obtained as 6014 = 840 Hz. Since the actual inverter has this
carrier frequency of 15 kHz, the number of pulses per cycle is 250
pulses (1500060).
Frequency and voltage can be controlled only in the inverter
section.
Smooth operation is possible at a low speed.
EdEd
(Ed: DC voltage)
Output Voltage Waveform
Ed
Ed
Average Output Voltage
Voltage-type Inverter Control Method
-
33
3-phase Power SupplyIM
Voltage/Current
Detection
N
0 t
Accel/decelInterrupt Signal
V
0f
PWM Signal
GeneratorBaseDriver
VoltageReference
Accel/decel Adjuster V/f Setter
Frequency Reference
Speed (Frequency)Reference
Transistor Base Signal
Current DetectorMotor
InverterConverter
V/f Control PWM Inverter
-
34
Rated Voltage
Voltage (V)
In Case of Variable Torque Load
In Case of Constant Torque Load
E/f Constant(Constant Magnetic Flux)
Compensation for Motor Primary Winding Voltage Drop
VoltageBias
Frequency f (Hz)Rated Frequency
V/f Constant
V/f control compensates for the voltage drop value of the motor
primary winding for the constant E/f (magnetic flux).
Voltage / Frequency Characteristics in V/f Control
-
35
tN
PWM Controlfdt
Speed Reference
Torque Reference
Accel/decel Adjuster
Speed Feedback Signal
Speed ControllerCurrent Reference Calculator
Current Amplitude Reference
Torque Current Reference
Each Phase Current Reference
MultiplierInstantaneousCurrentControl Circuit
Slip FrequencyCalculation
IM
Exciting Current Reference
Speed/Torque Control Switch
I 2IM
Current Phase Reference
f s fn
3- (or 2-) phase Current Feedback Signal
PG (Speed Detector) (Pulse Generator)
Motor
Current Detector
Inverter
Converter
3-phase Power Supply
I 2
M
Vector Control PWM Inverter
I1
I1
f
-
36
&I2r1 l1
&E&V&I1
&IMM
r2
12
s
sr
(b) Vector Diagram
& I 2 & I 1
&I 1
&I M
I2 I2
I2
I1
I1
IM
E
IME
I1V
V : Motor terminal voltager1 : Primary winding resistanceE :
Motor (internal) induced voltage r2 : Secondary winding
resistanceI1 : Motor primary (stator) current l1 : Primary winding
leak inductanceI2 : Motor secondary (rotor) currentM : Exciting
inductanceIM : Exciting current (exciting current component of
primary current) S : Slip
Equivalent Circuit and Vector Diagram
V 1l
1r1I
1I
s
r2
(a) Equivalent Circuit for Motor One Phase
-
37Open Loop Vector Control
Actual MotorInverter
Motor Control
Virtual Motor
VoltageACMotor CurrentActual Value
Error
Motor CurrentEstimated Value
Observer GainFluxEstimated ValueSpeedEstimated Value
+
-
Flux Observer Block Diagram
-
38
In Case of V/f Control In Case of Vector Control
V/f control suitable for the motor load characteristics is
needed in order to obtain low-speed torque.
Constant calculation using the motor test report or combination
by manufacturer is needed.
Varispeed G7Incorporates the auto-tuning program as standard so
that no
complicated adjustment is needed. The following three methods
are available for the auto-tuning.
1. Stop-type tuning only for line resistance2Stop-type tuning3.
Stop-type tuning24Rotation-type tuning
Input the basic numerical values such as motor NP into the
inverter so that the motor determines the motor constants required
for the vector control by measurement and calculation. This
function is called Auto-tuning.
Auto-tuning
-
39
Varispeed G7
Specifications V/f Control V/f Control with PG
FeedbackOpen-loop
Vector ControlFlux Vector
ControlBasic
ControlVoltage/frequency control
(open-loop)Voltage/frequency control with speed
compensation
Current vector control without PG
Current vector control with PG
Speed Detector Not needed
Needed (pulse generator) Not needed
Needed(pulse generator)
Option Card for Speed Detection Not needed Needed Not needed
NeededSpeed Control
Range 1:40 1:40 1:200 1:1000
Starting Torque 150% at 3 Hz 150% at 3 Hz 150% at 0.3 Hz 150% at
0 min
-1
Speed Control Accuracy 2 to 3% 0.03% 0.2% 0.02%
Torque Limit Disabled Disabled Enabled EnabledTorque Control
Disabled Disabled Enabled Enabled
Typical Applications
Multi-drives Replacement for existing
motor of which motor constants are unknown
Auto-tuning is enabled only for line resistance.
Simplified feedback control
Applications where pulse generator is attached on the machine
shaft
Any variable speed drives
Simplified servo drives
High-accuracy speed control
Torque control
Features of Control Mode
-
40
Chapter 3 Operation Characteristics
-
41
(a) Proper Acceleration Time (b) Short Acceleration Time
Acceleration
Output Frequency f
Motor speed N
Overload capacity when inverter capacity is equal to motor
capacity
Rated Current
Excessive Slip
Overload capacity when inverter capacity is increased
Rated Current
0
0 0
0
-
42
Inverter Output Frequency[Dotted line shows the set
accel. ratio.]
Motor Speed
Motor Current
Accel. time becomes longer automatically.
Peak current is limited to within the specified value.
Stall Prevention during Acceleration
t
-
43
Inverter Output Frequency
Load
Stall Prevention during RunningTo avoid overloading by rapid
fluid temperature in hydraulic machines. Avoid overloading by
decreasing output frequency.
t
-
44
DC Voltage
Inverter Output Frequency
Motor Current
RUN Signal
Actual Stall Prevention Function
Edc.
OVOA
-
45
Set Decel. Time td
Slip(Minus)
N Rapid decelerationSlip: Minus
f
fN,
t
NSlow decelerationSlip: Plus
Deceleration Time td Motor Operation Mode SliptdCoasting to a
stop time Motoring (Motoring area) PlustdCoasting to a stop time
Regeneration (power generation area) Minus
Deceleration
0
-
46
Inverter Output Frequency[Dotted line shows the set decel.
ratio.]
Motor Speed
DC Voltage
DC bus voltage is limited to within specified value.
Decel. time becomes longer automatically.
Stall Prevention during Deceleration
t
-
47
t
DC Injection Braking Time
t
DC Current
N
N
t
DC Injection BrakingStarting Frequency
N, f
DC Current
DC Injection Braking Time
N
FF
F
(a) Frequency Deceleration(Example of DC Injection
Braking Before Stop)
(b) All-area DC Injection Braking (c) Coasting to a Stop
DC Injection Braking
0 0 0
N, f N, f
Free Run
-
48
(a) Commercial Power Operation (b) Inverter Operation
VI
INV input current is a distortional wave current including
harmonics. Unified effective current including harmonics is INV
input current. Therefore, the power factor expressed by the above
equation is not always equal to the value measured with general
power factor meter.
Input Voltage / Current WaveformPower Factor =
Active Power Active PowerActive Power + Reactive Power=
3Inverter Input Power
Power Supply Voltage Inverter Input Current=
Apparent Power
-
49
er es et
er-s er-t es-t es-r et-r et-s
Phase voltage of power source
Phasecurrent PhasePhasePhasePhase----RRRR
The mechanism of harmonics current generating
EDC
Converter
Ver-s
er
es
et
r
s
t
Line voltage ofLine voltage ofLine voltage ofLine voltage
ofpower source
PhasePhasePhasePhase----SSSS
PhasePhasePhasePhase----TTTT
-
50
*1. The connection cable between the reactor and the inverter
must be 5 m or less, the shorter the better. The size must be
equivalent to the power supply cable or larger.
*2. Models of 18.5 to 75 kW (200-V class) and 18.5 to 160 kW
(400-V class) are incorporated with DC reactors. The power factor
improvement is more than 93%.
*3. The inverter power supply power factor is normally approx.
60 to 90%, which differs depending on the power supply
impedance.
Effect of power factor improvement: power supply factor 93 to
95% (at 100% load)*3
IM
NFBPower Supply Inverter
1+ 2+
Be sure to remove the connected piece between terminals.
Wiring distance:*35 m or less.
Motor
UZDA-B
Power Factor Improvement Reactor*2
U X
Typical Connection of DC Reactor
RST
UVW
-
51
Circuit Pattern Input Current Waveform Input Current Spectrum
Harmonics ContentNo countermeasures taken
Harmonics Order
88%
AC reactor inserted
38%
DC reactor inserted
33%
P
N
P
N
P
N
+
+
+
Typical Inverter Input Current Waveformin Each Power Supply
Method (1)
1 5
1 5 7 11
1 5 7 11
-
52
Circuit Pattern Input Current Waveform Input Current Spectrum
Harmonics Contents12-phase rectification
Harmonics Order
12%
PWM control converter
3%
P
N
P
N
+
+
1
1
Typical Inverter Input Current Waveformin Each Power Supply
Method (2)
-
53
Chapter 4Inverter Drive Units Selection
-
54
From General Industrial-use to Consumer EquipmentGeneral-purpose
Inverter Series
Varispeed G7
Varispeed F7
VS mini V7
VS mini J7
High-graded Function Current Vector Control (0.4 to 300 kW)
General-purpose Vector Control (0.4 to 300 kW)
Small-size Voltage Vector Control (0.1 to 7.5 kW)
Super Small-size Contactor Type (0.1 to 3.7 kW)
-
55
Capacity (kW) Control Method Braking Method Speed Control
200V Class 400V Class V/f
VS mini J7 Single-phase: 0.1 to 1.53-phase: 0.1 to 3.7 3-phase:
0.2 to 3.7 1:40 2 to 3
VS mini C Single-phase: 100 V 0.1 to0.75Single-phase,3-phase:
0.1 to 1.5 3-phase: 0.2 to 1.5 1:40 2 to 3
VS mini V7 Single-phase: 0.1 to 3.73-phase: 0.1 to 7.5 3-phase:
0.2 to 7.5
1:402 to 3
1
Varispeed F7 3-phase: 0.4 to 110 3-phase: 0.4 to 300
1:40 2 to 3
1:100 0.2
Varispeed G7 3-phase: 0.4 to 110 3-phase: 0.4 to 300
1:40 2 to 3 1:200 0.2
1:1000 0.02 VS-616R3 3-phase: 3.7 to 37 3-phase: 7.5 to 75 1:40
2 to 3
VS-686SS5 3-phase: 0.4 to 753-phase: 0.4 to 160
1:10 0.2
3-phase: 0.4 to 300 1:500 0.02 O
p
e
n
-
l
o
o
p
F
l
u
x
V
e
c
t
o
r
Features of Each General-purpose Inverter
P
o
w
e
r
R
e
g
e
n
e
r
a
t
i
o
n
R
e
s
i
s
t
o
r
D
i
s
c
h
a
r
g
e
A
c
c
u
r
a
c
y
(
%
)
C
o
n
t
r
o
l
R
a
n
g
e
T
o
r
q
u
e
C
o
n
t
r
o
l
-
56
Model Features Output Range
VS-676H5 High-graded function type 200 V: 0.4 to 75 kW 400 V:
0.4 to 800 kW575 V: 300 to 1200 kW
VS-686HV5SHigh-voltage super energy
saving
3300 V: 132 to 1250 kW6600 V: 250 to 2500 kW
VS-686HV5 3300 V: 225 to 1800 kW6000 V: 450 to 3000 W
VS-626M5/MR5Exclusive for machine tools
spindle(high accuracy)
200 V: 2.2 / 3.7 to 22 / 30 kW400 V: 3.7 / 5.5 to 37 / 45 kW
VS-626MC5 Exclusive for machine tools spindle (simplified
type)200 V: 2.2 / 3.7 to 11 / 15 kW
Sinusoidal wave PWMVS-656DC5
Harmonics: 0Power factor: 1
200 V: 15 to 75 kW400 V: 15 to 300 kW
VS-656RC5 Low cost type
200 V: 3.7 to 37 kW400 V: 3.7 to 75 kW
Exclusive-use Inverter SeriesF
o
r
S
y
s
t
e
m
P
o
w
e
r
R
e
g
e
n
e
r
a
t
i
v
e
C
o
n
v
e
r
t
e
r
F
o
r
M
a
c
h
i
n
e
T
o
o
l
S
p
i
n
d
l
e
P
o
w
e
r
R
e
g
e
n
e
r
a
t
i
v
e
U
n
i
t
-
57
Motor Type
Motor Output
Inverter Output
Inverter Model
Peripheral units, Options
Enclosure
Check ItemWhat to Decide
Capacity Selection
Machine specifications
Operation method
Load type and characteristics
Inverter capacity selection
Inverter model selection
Motor selection
Peripheral units, options
Investment effect
Investment effect
Inverter selection
Final specifications
-
58
Load Characteristics Typical Load Speed Torque
CharacteristicsLoad torque is constant for speed.General friction
loads
ConveyorCraneWinchOther friction loads
and gravity loads
Load torque is constant regardless of speed.Output power is in
proportion to speed.
T = k T: torqueP = kN P: Output
k: Proportional constantLoads of which load torque is decreased
as the speed is reduced
FanBlowerPumpOther fluid loads
Load torque is in proportion to the square of speed. Output is
in proportion to the
cube of speed. T = kN2P = kN3
Loads of which output becomes constant for the speed
Constant tension force winder ofcenter drive
Spindle motors of machine tools
Veneer rotary laths
Output power required by the load is constant. Load torque is in
inverse proportion to speed.
T = k/NP = k
Loads of which load torque varies depending on the speedLoads
having the nature between the low output load and the constant
torque load
Speed torque/output characteristics between the constant torque
load and constant output load
Load Torque
Load Output
SpeedTo
r
q
u
e
,
O
u
t
p
u
t
Load Torque
Load OutputSpeedT
o
r
q
u
e
,
O
u
t
p
u
t
Typical Load Torque Characteristics
0
1.0
1.0
2.0
Load Torque
Load Output
1.0
2.0
2.0
T
o
r
q
u
e
,
O
u
t
p
u
t
T
o
r
q
u
e
,
O
u
t
p
u
t
R
e
d
u
c
e
d
T
o
r
q
u
e
C
o
n
t
r
o
l
T
o
r
q
u
e
Load Output
Load Torque
C
o
n
s
t
a
n
t
P
o
w
e
r
R
e
d
u
c
e
d
P
o
w
e
r
Speed
1.0
2.0
-
59
Motor may be overheated in a low-speed area.
Since the min-1 of the external fan becomes lower in a low-speed
area, the cooling capability is deteriorated. Therefore, the motor
may be overheated unless the load is reduced in a low-speed
area.
Motor can operate properly even in a low-speed area.
The motor is designed for inverter drives, therefore, the
temperature is within the specified value even if the motor is used
at a low speed.
The above characteristics show the torque that can be allowed at
continuous operation. There is no difference in the torque that the
motor can generate in a short time, such as at starting, between
the standard motor and the constant torque motor.
Standard Motor Output Inverter Exclusive-use Motor Output
60606060
3333 20202020
0.50.50.50.5
55555555
Difference between Inverter Exclusive-use Motor and Standard
Motor
Standard MotorStandard Motor Exclusive-use MotorExclusive-use
Motor
A
l
l
o
w
a
b
l
e
L
o
a
d
T
o
r
q
u
e
(
%
)
A
l
l
o
w
a
b
l
e
L
o
a
d
T
o
r
q
u
e
(
%
)
Example:1:10 Const. Torque Motor
-
60
Load Torque
Accel Torque
Decel Torque
Td 2piJN60td
Required Brake TorqueTB=TdTL
Required Motor Torque
TaTL
Ta 2piJN60ta
TL fVpiN
Nm
The inverter regeneration capability is a key point. The
regeneration capability depends on selection of the inverter output
and braking unit type.
Operation Pattern and Calculation of Load Torque
Can start?Motor starting torque must be greater than load
starting torque.
Is motor temperature proper?Temperature rise must be within the
specified value.
Time
Can accelerate?Motor torque exceeding the torque requiredfor
acceleration (Ta+TL) must be available.
The volume of the motor output torque is a key point.Torque
depends on the motor output, inverter output, control method or
boost amount.
Can decelerate?Brake torque required for deceleration
must be available. Energy at deceleration can be consumed or
regenerated to the power supply.
TL
Ta
Td
TaTL
ta td
-
61
(a) Motor Mode
(b) Generator (Regeneration) Mode
IMCommercial
Power Mechanical Energy
Power FlowPower Flowi
S 0(Motor power factor cos0)
*1 Discharge resistor = braking resistor *2 Monitors DC voltage
and turns ON the transistor when DC voltage exceeds the specified
level.
The inverter built-in braking transistor or braking unit is
used.
IMCommercial
Power
Mechanical EnergyKinetic EnergyPotential Energy
Power Flow
(i =0i
*1R
*2(ON)
Thermal Energy
S 0(Motor power factor cos 0)
Power Flow and Regenerative Braking
-
62
(1) Power supply transformer
(2) Circuit breaker or(3) Leakage breaker
(4) Contactor(6)Noise filter
(5) AC reactor
(10) Braking resistor unit
(7) DC reactor
(8) Noise filter
(9) Contactor
Peripheral Devices and Their Connections
(11) Contactor for commercial power backup
(12) Zero phase reactor
(13) Thermalrelay (14) Motor
-
63
No. Name Purpose and Selecting Points1 Power transformer
Transformer capacity Inverter capacity 1.5
2 Circuit breaker Breaks accidental current (shortcircuit
current). Rated current inverter rated current 1.5 Described in the
inverter catalog.
3 Leakage breaker
Grounding protectionHigh frequency leak current protection for
electric shock accident & leakage current fire.
1. Use a breaker provided with countermeasures for high
frequency leakage current. 2. Increase sensitivity current.3.
Decrease inverter carrier frequency.
4 ContactorSince the inverter has the contactor function, any
contactor is not needed except for special cases.When a braking
resistor is used, insert a contactor to make thermal trip
circuit.Perform RUN/STOP at the inverter side and set the contactor
to Always ON to use.
57
AC reactorDC reactor
For high frequency current suppression and improvement of power
factorInstall a reactor to protect the inverter when the power
supply capacity is large.
68
Noise filter orZero-phase reactor Prevent radio noise generated
by inverter section
910
Braking unitBraking resistor unit Used when an electrical brake
is needed (when the required braking torque exceeds 20%).
1112
Contactor for commercial power backup
Used for backup at inverter failure or when commercial power
supply is used for normal operations.
13 Thermal relay Not needed when one motor is driven by one
inverter. (Connected when more than two motors are used.)
How to Select Peripheral Devices
-
64
Chapter 5Inverter Functions and Advantages
-
65
No. Advantage Technical Details Main Precautions
1
Can control speeds of the specified constant-speed type
motors.
Number of revolutions changes when squirrel-cage-type motor
terminal voltage and frequency are changed.
Since a standard motor has temperature rise that becomes greater
at a low speed, torque must be reduced according to frequency.
2
Soft start/stop enabled. Accel/decel time can be set freely from
a low speed.(0.01 to 6000 seconds).
Set proper accel/decel time after performing load operation.
3
Highly frequent start/stop enabled.
Little motor heat generation since smooth accel/decel is enabled
with little current.
Motor or inverter capacity frame must be increased depending on
the accel/decel capacity. Check the accel/decel time and load
J.
4
FWD/REV run enabled without main circuit contactor.
Because of phase rotation changes by transistor, there are no
moving parts like conventional contactors so that interlock
operation can be assured.
When applying the inverter to an elevating unit, use a motor
with a brake to hold mechanically for stand still.
Advantages of Inverter Applications (1)
Cushion Start
t
f
FWD
Run
REV
Run
Cushion Stop
Inverter
RUN Command
FWD
Run
REV
Run
t
f
-
66
No. Advantage Technical Details Main Precautions
5
Can apply an electrical brake. Since mechanical energy is
converted into electrical energy and absorbed in the inverter at
decel, the motor can auto-matically provide braking force.DC
current is applied to the motor around zero-speed so that it
becomes dynamic braking, to completely stop the motor.
Braking force is approx. 20% when only the inverter is used.
Attaching a braking resistor (optional) externally can increase the
braking force.Pay attention to the capacity of the resistor.
6
Can control speeds of the motor under adverse atmosphere.
Since the inverter drives squirrel-cage motors, it can be used
easily for explosionproof, waterproof, outdoor or special types of
motors.
An explosionproof motor in combination with an inverter is
subject to explosionproof certification.
7
High-speed rotation enabled. Commercial power supply can provide
up to 3600 min-1 (2-pole at 60Hz) or 3000 min-1 (2-pole, at 50Hz).
A general-purpose inverter can increase frequency up to 400 Hz
(12000 min-1) while a high-frequency inverter can increase it up to
3000 Hz (180000 min-1).
The speed of a general-purpose motor cannot be increased by
simply increasing the frequency. (It can be applied without being
changed if frequency is approx. 120 Hz.)Mechanical strength and
dynamic balance must be examined. 60Hz 120Hz 400Hz
Electrical Braking
Advantages of Inverter Applications (2)
f
t
V
f
-
67
No. Advantage Technical Details Main Precautions
8
The speeds of more than one motor can be controlled by one
inverter.
The inverter is a power supply unit to the motor, therefore, as
many motors as the capacity allows can be connected.These motors do
not have to be the same capacity.
The number of motor revolutions differs depending on each motor
characteristics or load ratio even at the same frequency.(Among
general-purpose motors, speed deviation of 2 to 3% can be
considered.)Synchronous motors have the same number of
revolutions.
9
Power supply capacity can be small when the motor is started
up.
Large current (5 or 6 times larger than the motor rating) does
not flow as with a commercial power supply start.Current can be
limited to at most 100 to 150% by low-frequency start.
Transformer capacity (kVA)= 1.5 inverter output capacity
10Number of revolutions becomes constant regardless of power
supply frequency.
Output freq. can be set regardless of power supply freq.
50/60Hz.
Inverter
Advantages of Inverter Applications (3)
IM
IM
IM
-
68
Inverter Output Voltage
Inverter Output Current
Inverter Input Current
150%
150%100% Current
100% Current
100% Voltage (100% Speed)
t
Motor and Power Supply Currentin Inverter Drives
t
t0
-
69
Energy Saving for General Industrial Machines & Systems
M
i
n
i
m
i
z
e
t
h
e
E
n
e
r
g
y
C
o
n
s
u
m
p
t
i
o
n
s
(1)Energy Saving for Mechanical Systems by Means of Variable
Speed Drive of Motors
(2)High Efficiency Motors
(3)Change to High Efficiency Drive for Existing Variable Speed
Drive
(4)Regeneration of Braking (Kinetic)Energy
(5)Others
A . Variable Torque LoadB . Constant Torque LoadC . Constant
Power Load
A . High Efficiency Induction Motor B . IPM(Interior Permanent
Magnet Motor)
A . Primary Voltage Control of Induction MotorB . Secondary
Resistor Control of Wound Rotor Induction MotorC . VS-Motor (Eddy
Current Coupling Motor)D . Variable Frequency Drive of Induction
MotorE . Variable Frequency Drive of IPM
A . Regenerative ConverterB . Drive Regenerated Energy To
Another Inv. Drive
A . ON-OFF Control for Mechanical SystemsB . Inverter Energy
Saving (Voltage) Control Method
-
70
Applied Load Concept of Energy-saving Fans Pumps Blowers (Any
Variable Torque Load)
Replace with a more efficient motor. Reduce a redundancy of the
facility for the actual loads. Abate the head loss at valves or
dampers.
(2) (1) (1)
Extruders Conveyors, etc. (Any Constant Torque Load)
Change to more efficient drives. Replace the primary voltage
control, secondary resistance control, eddy-current coupling (VS
motors) with a more efficient control method(Frequency
Control).
(3)
Cranes Elevators, etc.
Collect the regenerative energy at lowering by using the
inverter power supply regenerative function.
(4)
Rewinders Collect the regenerative energy of the rewinders.
Replace with a more efficient motor. (4) (2)
General Machines Reduce the starting energy. (Use the inverter
as a starter to stop the operations positively whenever the load
ratio is low.)
(5)a
Optimum Energy-saving Plan for Facility
-
71
AN
Hd1.0
0 0.5 1.0 ( p.u.)Air volume (Q)
R
Hi
( p.u.)
Air Volume and Wind Pressure Characteristics of Fan
H1.03N0.56NQ0.59QRQ
Rated air volume: 250m3/secRated wind pressure: 433mmAqFan
efficiency at rated air volume: 0.7Fan efficiency at 50% air
volume: 0.6
Ad
Ai
R50
N50Q50H0
-
72
Energy saving Effect in the Fan Application In the case of
damper control
The wind pressure in 50% air volume is Hd = 1.03 + 0.56 0.5 -
0.59 0.52 = 1.16
The power becomesm = 0.9 is the motor efficiency
In the case of inverter controlThe wind pressure in 50% air
volume is Hi = 0.52 = 0.25
The power becomesi = 0.95 is the inverter efficiency
The electric-power saving quantityPS = PD Pi = 15.3kWOn the
assumption of electric power unit price: \15/kWh and annual
continuous running:
8000hours,We can save the electric charge as follows. 15.3 15
8000 = \ 1,836,000
19.0kW=4332500.90.661201.160.5
=6120QH
=Pmf
D
3.7kW=4332500.950.90.761200.250.5
=6120QH
=Piimf
-
73
Flow Rate and Head Characteristics of Pump
Squeeze volume
Low speed
1.5
HB
1
Hi0.5
0 0.5 1
Flow rate (P.U)
H
e
a
d
(
P
.
U
)
R50
R
NR0
N50
-
74
Energy saving Effect in the Pump Application In the case of
valve control
The head in 50% flow rate is HB = 1.25 0.25 0.52 = 1.188
The power becomesm = 0.9 is the motor efficiency
In the case of inverter controlThe head in 50% flow rate is Hi =
0.7 0.1 0.52 = 0.725
The power becomesi = 0.95 is the inverter efficiency
The electric-power saving quantityPS = PB Pi = 15.2kWOn the
assumption of electric power unit price: \15/kWh and annual
continuous running:
8000hours,We can save the electric charge as follows. 15. 2 15
8000 = \ 1,824,000
28.9kW=2560.90.566.121.1880.5
=6.12QH
=Pmp
B
13.7kW=2560.950.90.766.120.7250.5
=6.12QH
=Piimp
-
75
Outline of Software Functions (1)Function Name Function Name
Function Name Function Name
ApplicationsApplicationsApplicationsApplications
PurposePurposePurposePurpose
DescriptionDescriptionDescriptionDescription
MultiMultiMultiMulti----step Speed step Speed step Speed step
Speed
OperationOperationOperationOperation
Feeders,Feeders,Feeders,Feeders, etcetcetcetc.... Schedule
operation Schedule operation Schedule operation Schedule
operation
at specified speedat specified speedat specified speedat
specified speed
By combining signals, operation is performed at frequency stored
By combining signals, operation is performed at frequency stored By
combining signals, operation is performed at frequency stored By
combining signals, operation is performed at frequency stored
internally (up to 9internally (up to 9internally (up to
9internally (up to 9----step speeds). Connection with the sequencer
is easy; step speeds). Connection with the sequencer is easy; step
speeds). Connection with the sequencer is easy; step speeds).
Connection with the sequencer is easy;
simplified positioning by using limit switch is also possible.
simplified positioning by using limit switch is also possible.
simplified positioning by using limit switch is also possible.
simplified positioning by using limit switch is also possible.
Accel/decel Changing Accel/decel Changing Accel/decel Changing
Accel/decel Changing
OperationOperationOperationOperation
Automatic panel Automatic panel Automatic panel Automatic
panel
feeders, etc.feeders, etc.feeders, etc.feeders, etc.
Changing external Changing external Changing external Changing
external
signal of accel/decel signal of accel/decel signal of
accel/decel signal of accel/decel
timetimetimetime
Using an external signal can change the accel/decel rate. This
function Using an external signal can change the accel/decel rate.
This function Using an external signal can change the accel/decel
rate. This function Using an external signal can change the
accel/decel rate. This function
is effective when two motors are driven alternately by one
inverter or is effective when two motors are driven alternately by
one inverter or is effective when two motors are driven alternately
by one inverter or is effective when two motors are driven
alternately by one inverter or
when smooth accel/decel is needed only in the highwhen smooth
accel/decel is needed only in the highwhen smooth accel/decel is
needed only in the highwhen smooth accel/decel is needed only in
the high----speed area.speed area.speed area.speed area.
SSSS----curve Time curve Time curve Time curve Time
CharacteristicsCharacteristicsCharacteristicsCharacteristics
feeders such as feeders such as feeders such as feeders such
as
conveyors, carts, conveyors, carts, conveyors, carts, conveyors,
carts,
etc.etc.etc.etc.
Prevention of Prevention of Prevention of Prevention of
start/stop shockstart/stop shockstart/stop shockstart/stop
shock
Smooth movement can be achieved by setting SSmooth movement can
be achieved by setting SSmooth movement can be achieved by setting
SSmooth movement can be achieved by setting S----curve delay when
curve delay when curve delay when curve delay when
accel/decel starts or finishes.accel/decel starts or
finishes.accel/decel starts or finishes.accel/decel starts or
finishes.
FrequencyFrequencyFrequencyFrequency Upper/lower Upper/lower
Upper/lower Upper/lower
Limit OperationLimit OperationLimit OperationLimit Operation
PumpsPumpsPumpsPumps
BlowersBlowersBlowersBlowers
Limit of motor Limit of motor Limit of motor Limit of motor
revolutionsrevolutionsrevolutionsrevolutions
Frequency reference upper/lower value, bias and gain can be set
Frequency reference upper/lower value, bias and gain can be set
Frequency reference upper/lower value, bias and gain can be set
Frequency reference upper/lower value, bias and gain can be set
individually without adding any peripheral devices.individually
without adding any peripheral devices.individually without adding
any peripheral devices.individually without adding any peripheral
devices.
Specified Frequency Specified Frequency Specified Frequency
Specified Frequency
Setting Prohibition Setting Prohibition Setting Prohibition
Setting Prohibition
(Frequency Jump Control)(Frequency Jump Control)(Frequency Jump
Control)(Frequency Jump Control)
General machinesGeneral machinesGeneral machinesGeneral machines
Prevention of Prevention of Prevention of Prevention of
machine system machine system machine system machine system
vibrationvibrationvibrationvibration
In order to prevent vibration of the machine system, the
oscillation point In order to prevent vibration of the machine
system, the oscillation point In order to prevent vibration of the
machine system, the oscillation point In order to prevent vibration
of the machine system, the oscillation point
is avoided automatically during constantis avoided automatically
during constantis avoided automatically during constantis avoided
automatically during constant----speed operation. This function
speed operation. This function speed operation. This function speed
operation. This function
can also be used for dead zone control.can also be used for dead
zone control.can also be used for dead zone control.can also be
used for dead zone control.
DWELL FunctionDWELL FunctionDWELL FunctionDWELL Function
HeavyHeavyHeavyHeavy----inertia loads inertia loads inertia loads
inertia loads
such as centrifugal such as centrifugal such as centrifugal such
as centrifugal
separators etc.separators etc.separators etc.separators etc.
Smooth accel/decel Smooth accel/decel Smooth accel/decel Smooth
accel/decel
of heavyof heavyof heavyof heavy----inertia inertia inertia
inertia
loadsloadsloadsloads
Prevents the motor from stalling by holding output frequency
temporarily Prevents the motor from stalling by holding output
frequency temporarily Prevents the motor from stalling by holding
output frequency temporarily Prevents the motor from stalling by
holding output frequency temporarily
during accel/decel. during accel/decel. during accel/decel.
during accel/decel.
Speed SearchSpeed SearchSpeed SearchSpeed Search Inertia load
drives Inertia load drives Inertia load drives Inertia load
drives
such as blowers, such as blowers, such as blowers, such as
blowers,
winders winders winders winders
Starting of coasting Starting of coasting Starting of coasting
Starting of coasting
motormotormotormotor
PerformsPerformsPerformsPerforms pullpullpullpull----inininin
operationoperationoperationoperation
automaticallyautomaticallyautomaticallyautomatically
intointointointo thethethethe setsetsetset
frequencyfrequencyfrequencyfrequency
withoutwithoutwithoutwithout
stoppingstoppingstoppingstopping thethethethe
coastingcoastingcoastingcoasting motormotormotormotor....
MotorMotorMotorMotor speedspeedspeedspeed
detectordetectordetectordetector isisisis notnotnotnot
neededneededneededneeded....
Compensation for Compensation for Compensation for Compensation
for
Momentary Power LossMomentary Power LossMomentary Power
LossMomentary Power Loss
General machinesGeneral machinesGeneral machinesGeneral machines
Continuing operation Continuing operation Continuing operation
Continuing operation
at a momentary at a momentary at a momentary at a momentary
power losspower losspower losspower loss
Restart the motor automatically after recovery from a momentary
power Restart the motor automatically after recovery from a
momentary power Restart the motor automatically after recovery from
a momentary power Restart the motor automatically after recovery
from a momentary power
loss by using the remaining control power supply to continue the
motor loss by using the remaining control power supply to continue
the motor loss by using the remaining control power supply to
continue the motor loss by using the remaining control power supply
to continue the motor
operations. operations. operations. operations.
Fault RetryFault RetryFault RetryFault Retry
AirAirAirAir----conditioning,conditioning,conditioning,conditioning,
etcetcetcetc....
Improvement of Improvement of Improvement of Improvement of
operation reliabilityoperation reliabilityoperation
reliabilityoperation reliability
Resets the fault automatically after the inverter detects a
fault and Resets the fault automatically after the inverter detects
a fault and Resets the fault automatically after the inverter
detects a fault and Resets the fault automatically after the
inverter detects a fault and
performs selfperforms selfperforms selfperforms self----analysis
and restarts the operation without stopping the analysis and
restarts the operation without stopping the analysis and restarts
the operation without stopping the analysis and restarts the
operation without stopping the
motor. Up to 10 retry operations may be selected.motor. Up to 10
retry operations may be selected.motor. Up to 10 retry operations
may be selected.motor. Up to 10 retry operations may be
selected.
-
76
Outline of Software Functions (2)Function Name Function Name
Function Name Function Name
ApplicationsApplicationsApplicationsApplications
PurposePurposePurposePurpose
DescriptionDescriptionDescriptionDescription
Carrier Frequency SettingCarrier Frequency SettingCarrier
Frequency SettingCarrier Frequency Setting
GeneralGeneralGeneralGeneral machinesmachinesmachinesmachines
NoiseNoiseNoiseNoise reductionreductionreductionreduction
SetsSetsSetsSets thethethethe inverterinverterinverterinverter
carriercarriercarriercarrier frequencyfrequencyfrequencyfrequency
totototo anyanyanyany arbitraryarbitraryarbitraryarbitrary
valuevaluevaluevalue totototo reducereducereducereduce
noisenoisenoisenoise
oscillationoscillationoscillationoscillation fromfromfromfrom
thethethethe motormotormotormotor andandandand
machinemachinemachinemachine systemsystemsystemsystem....
ThisThisThisThis functionfunctionfunctionfunction isisisis
alsoalsoalsoalso effectiveeffectiveeffectiveeffective
forforforfor reducingreducingreducingreducing
noisenoisenoisenoise....
Load Speed DisplayLoad Speed DisplayLoad Speed DisplayLoad Speed
Display General machinesGeneral machinesGeneral machinesGeneral
machines Improvement of Improvement of Improvement of Improvement
of
monitor functionmonitor functionmonitor functionmonitor
function
CanCanCanCan displaydisplaydisplaydisplay thethethethe
motormotormotormotor speedspeedspeedspeed (min(min(min(min
-
--
-1
11
1
),),),), loadloadloadload machinemachinemachinemachine
rotatingrotatingrotatingrotating speedspeedspeedspeed
(min(min(min(min
-
--
-1
11
1
))))
orororor linelinelineline speedspeedspeedspeed
(m/min)(m/min)(m/min)(m/min)....
Pulse Train InputPulse Train InputPulse Train InputPulse Train
Input General machinesGeneral machinesGeneral machinesGeneral
machines Improvement of Improvement of Improvement of Improvement
of
operabilityoperabilityoperabilityoperability
In addition to the function as frequency reference, PID aimed
value and In addition to the function as frequency reference, PID
aimed value and In addition to the function as frequency reference,
PID aimed value and In addition to the function as frequency
reference, PID aimed value and
PID feedback value at PID control can be input as a pulse
train.PID feedback value at PID control can be input as a pulse
train.PID feedback value at PID control can be input as a pulse
train.PID feedback value at PID control can be input as a pulse
train.
Pulse Train OutputPulse Train OutputPulse Train OutputPulse
Train Output General machinesGeneral machinesGeneral
machinesGeneral machines Improvement of Improvement of Improvement
of Improvement of
monitoring monitoring monitoring monitoring
performanceperformanceperformanceperformance
Frequency reference, output frequency, motor speed, output
frequency Frequency reference, output frequency, motor speed,
output frequency Frequency reference, output frequency, motor
speed, output frequency Frequency reference, output frequency,
motor speed, output frequency
after softafter softafter softafter soft----start, PID feedback
amount and PID input value can be output start, PID feedback amount
and PID input value can be output start, PID feedback amount and
PID input value can be output start, PID feedback amount and PID
input value can be output
in pulses.in pulses.in pulses.in pulses.
Stopping Method Stopping Method Stopping Method Stopping
Method
Selection Selection Selection Selection
GeneralGeneralGeneralGeneral machinesmachinesmachinesmachines
Stopping method Stopping method Stopping method Stopping method
suitable for the suitable for the suitable for the suitable for
the
machine machine machine machine
characteristicscharacteristicscharacteristicscharacteristics
Selects deceleration to a stop, coasting to a stop or DC
injection Selects deceleration to a stop, coasting to a stop or DC
injection Selects deceleration to a stop, coasting to a stop or DC
injection Selects deceleration to a stop, coasting to a stop or DC
injection
braking stop according to the braking torque or machine inertia.
braking stop according to the braking torque or machine inertia.
braking stop according to the braking torque or machine inertia.
braking stop according to the braking torque or machine
inertia.
3333----wire Sequencewire Sequencewire Sequencewire Sequence
General machinesGeneral machinesGeneral machinesGeneral machines
SimpleSimpleSimpleSimple
configurationconfigurationconfigurationconfiguration
ofofofof controlcontrolcontrolcontrol
circuitcircuitcircuitcircuit
Operation is enabled using automaticOperation is enabled using
automaticOperation is enabled using automaticOperation is enabled
using automatic----recoveryrecoveryrecoveryrecovery----type
pushbutton switch.type pushbutton switch.type pushbutton
switch.type pushbutton switch.
Frequency Hold OperationFrequency Hold OperationFrequency Hold
OperationFrequency Hold Operation General machinesGeneral
machinesGeneral machinesGeneral machines Improvement of Improvement
of Improvement of Improvement of
operabilityoperabilityoperabilityoperability
Holds frequency increase/decrease temporarily during
acceleration or Holds frequency increase/decrease temporarily
during acceleration or Holds frequency increase/decrease
temporarily during acceleration or Holds frequency
increase/decrease temporarily during acceleration or
deceleration. deceleration. deceleration. deceleration.
UP/DOWN OperationUP/DOWN OperationUP/DOWN OperationUP/DOWN
Operation General machinesGeneral machinesGeneral machinesGeneral
machines Improvement of Improvement of Improvement of Improvement
of
operabilityoperabilityoperabilityoperability
Speed setting is enabled remotely by ON/OFF operation. Speed
setting is enabled remotely by ON/OFF operation. Speed setting is
enabled remotely by ON/OFF operation. Speed setting is enabled
remotely by ON/OFF operation.
Frequency DetectionFrequency DetectionFrequency
DetectionFrequency Detection General machinesGeneral
machinesGeneral machinesGeneral machines Frequency detection
Frequency detection Frequency detection Frequency detection
to be used for to be used for to be used for to be used for
interlockinterlockinterlockinterlock
Specifies the set value of output frequency, and outputs to the
multiSpecifies the set value of output frequency, and outputs to
the multiSpecifies the set value of output frequency, and outputs
to the multiSpecifies the set value of output frequency, and
outputs to the multi----
function output terminal when frequency exceeds the range or
becomes function output terminal when frequency exceeds the range
or becomes function output terminal when frequency exceeds the
range or becomes function output terminal when frequency exceeds
the range or becomes
short.short.short.short.
Overtorque Detection and Overtorque Detection and Overtorque
Detection and Overtorque Detection and
Undertorque DetectionUndertorque DetectionUndertorque
DetectionUndertorque Detection
MachineMachineMachineMachine toolstoolstoolstools
Blowers,Blowers,Blowers,Blowers,
cutters,cutters,cutters,cutters,
extrudersextrudersextrudersextruders
Machine protection, Machine protection, Machine protection,
Machine protection,
improvement of improvement of improvement of improvement of
reliability for reliability for reliability for reliability
for
continuous operationcontinuous operationcontinuous
operationcontinuous operation
"Closed" when motor generating torque exceeds the overtorque
"Closed" when motor generating torque exceeds the overtorque
"Closed" when motor generating torque exceeds the overtorque
"Closed" when motor generating torque exceeds the overtorque
detection level. Can be used as an interlock signal for machine
detection level. Can be used as an interlock signal for machine
detection level. Can be used as an interlock signal for machine
detection level. Can be used as an interlock signal for machine
protection such as cutting loss or overload detection of machine
tools.protection such as cutting loss or overload detection of
machine tools.protection such as cutting loss or overload detection
of machine tools.protection such as cutting loss or overload
detection of machine tools.
-
77
Outline of Software Functions (3)Function Name Function Name
Function Name Function Name
ApplicationsApplicationsApplicationsApplications
PurposePurposePurposePurpose
DescriptionDescriptionDescriptionDescription
Stall PreventionStall PreventionStall PreventionStall Prevention
General General General General
machinesmachinesmachinesmachines
Machine protection, Machine protection, Machine protection,
Machine protection,
improvement of improvement of improvement of improvement of
reliability for reliability for reliability for reliability
for
continuous operation continuous operation continuous operation
continuous operation
Interrupts accel/decel when frequency reaches each set value
during Interrupts accel/decel when frequency reaches each set value
during Interrupts accel/decel when frequency reaches each set value
during Interrupts accel/decel when frequency reaches each set value
during
acceleration, deceleration or running, and continues operation
when it acceleration, deceleration or running, and continues
operation when it acceleration, deceleration or running, and
continues operation when it acceleration, deceleration or running,
and continues operation when it
becomes lower than the set value. becomes lower than the set
value. becomes lower than the set value. becomes lower than the set
value.
Electronic Overload Electronic Overload Electronic Overload
Electronic Overload
Thermal RelayThermal RelayThermal RelayThermal Relay
General General General General
machinesmachinesmachinesmachines
Detection of motor Detection of motor Detection of motor
Detection of motor
overloadoverloadoverloadoverload
Set the motor rated current value and select the allowable load
Set the motor rated current value and select the allowable load Set
the motor rated current value and select the allowable load Set the
motor rated current value and select the allowable load
characteristics for each motor type, and the electronic overload
thermal characteristics for each motor type, and the electronic
overload thermal characteristics for each motor type, and the
electronic overload thermal characteristics for each motor type,
and the electronic overload thermal
relay performs overload protection.relay performs overload
protection.relay performs overload protection.relay performs
overload protection.
Torque Limit (Droop Torque Limit (Droop Torque Limit (Droop
Torque Limit (Droop
Characteristics Selection)Characteristics
Selection)Characteristics Selection)Characteristics Selection)
Pumps,blowers,Pumps,blowers,Pumps,blowers,Pumps,blowers,
extruders,extruders,extruders,extruders, etcetcetcetc....
Machine protectionMachine protectionMachine protectionMachine
protection
Improvement of Improvement of Improvement of Improvement of
reliability for reliability for reliability for reliability
for
continuous operationcontinuous operationcontinuous
operationcontinuous operation
Torque limitTorque limitTorque limitTorque limit
AdjustsAdjustsAdjustsAdjusts outputoutputoutputoutput
frequencyfrequencyfrequencyfrequency
accordingaccordingaccordingaccording totototo thethethethe
loadloadloadload statusstatusstatusstatus whenwhenwhenwhen
thethethethe motormotormotormotor
generatinggeneratinggeneratinggenerating
torquetorquetorquetorque reachesreachesreachesreaches aaaa
certaincertaincertaincertain levellevellevellevel....
OptimumOptimumOptimumOptimum forforforfor
tiptiptiptip----lesslesslessless
operationoperationoperationoperation forforforfor
pumpspumpspumpspumps orororor blowersblowersblowersblowers....
EnergyEnergyEnergyEnergy----saving Controlsaving Controlsaving
Controlsaving Control General General General General
machinesmachinesmachinesmachines
Automatic operation Automatic operation Automatic operation
Automatic operation
with maximum with maximum with maximum with maximum
efficiencyefficiencyefficiencyefficiency
Supplies sufficient voltage for the motor to reach maximum
efficiency Supplies sufficient voltage for the motor to reach
maximum efficiency Supplies sufficient voltage for the motor to
reach maximum efficiency Supplies sufficient voltage for the motor
to reach maximum efficiency
according to the load or rotating speed.according to the load or
rotating speed.according to the load or rotating speed.according to
the load or rotating speed.
PID ControlPID ControlPID ControlPID Control
Pumps,Pumps,Pumps,Pumps,
airairairair----conditioning,conditioning,conditioning,conditioning,
etcetcetcetc....
Automatic process Automatic process Automatic process Automatic
process
controlcontrolcontrolcontrol
CalculatesCalculatesCalculatesCalculates thethethethe
PIDPIDPIDPID inininin thethethethe inverterinverterinverterinverter
andandandand usesusesusesuses thethethethe resultresultresultresult
ofofofof thethethethe
calculationcalculationcalculationcalculation
asasasas itsitsitsits ownownownown
frequencyfrequencyfrequencyfrequency
referencereferencereferencereference totototo
performperformperformperform constantconstantconstantconstant
controlcontrolcontrolcontrol ofofofof
pressure,pressure,pressure,pressure,
flowflowflowflow rate,rate,rate,rate, windwindwindwind
amount,amount,amount,amount, etcetcetcetc....
Droop ControlDroop ControlDroop ControlDroop Control Conveyors
of Conveyors of Conveyors of Conveyors of
distributed drivesdistributed drivesdistributed
drivesdistributed drives
MultiMultiMultiMulti----drive drive drive drive
motorsmotorsmotorsmotors
Proper distribution of Proper distribution of Proper
distribution of Proper distribution of
loadloadloadload
SetsSetsSetsSets motormotormotormotor speedspeedspeedspeed
regulationregulationregulationregulation totototo anananan
arbitraryarbitraryarbitraryarbitrary valuevaluevaluevalue....
MakingMakingMakingMaking
highhighhighhigh----resistanceresistanceresistanceresistance
characteristicscharacteristicscharacteristicscharacteristics
distributesdistributesdistributesdistributes thethethethe
loadsloadsloadsloads ofofofof severalseveralseveralseveral
motorsmotorsmotorsmotors
properlyproperlyproperlyproperly....
Zero Servo FunctionZero Servo FunctionZero Servo FunctionZero
Servo Function Elevators,Elevators,Elevators,Elevators,
cartscartscartscarts ZeroZeroZeroZero----speed stop to speed stop
to speed stop to speed stop to
lock the motorlock the motorlock the motorlock the motor
HoldsHoldsHoldsHolds aaaa motormotormotormotor inininin
thethethethe lockedlockedlockedlocked statusstatusstatusstatus
atatatat zerozerozerozero speedspeedspeedspeed
whetherwhetherwhetherwhether externalexternalexternalexternal
forceforceforceforce
isisisis appliedappliedappliedapplied inininin thethethethe
forwardforwardforwardforward orororor reversereversereversereverse
directiondirectiondirectiondirection....
-
78
Similar MachinesAir-conditioning fans for buildingsFans for
cooling towerDust collection blowersFans for boilersHeat treating
furnace blowers
Application for Dust Collection BlowersFunctions
AvailableChanging of commercial power supply and inverter
operationsRestart from coasting statusEnergy-saving control mode at
light loadFault retry
Inverter
BlowerDust CollectorDamper
Motor MCMCMCB
MC
-
79
Application for Chemical Feeding Pumps
Inverter
Raw Water
PumpFlow Rate Detection
Adjuster
Motor
Chemical
Speed Reference (4 to 20 mA)
MCB
Similar MachinesChemical feeding pumpsCool/warm water
circulation pumps Water supply/ discharge pumps Hydraulic
pumpsSubmersible pumps
Functions AvailableEnergy-saving control mode at low speed PID
control4-20mA reference by instrumentation Minimum speed
setting
-
80
Conveyor Follow-up Operation
HopperFeeder
ConveyorGeared Motor
Geared Motor MCB
MCB
PG Pulse Encoder
InverterInverter
Power Supply
Main Speed Setting
Pulse Train Input
Power Supply
Similar MachinesRaw material supply conveyors Shuttle
conveyorsChain conveyorsSteel pipe feeding conveyors
Functions AvailableImprovement of constant position stop
accuracy Increasing the starting torque Smooth accel/decelChanging
accel/decel timeSimultaneous control of several motors by one
inverter
-
81
Example for Crane Exclusive-use Software ( V/f Control )
IOUT : Inverter Output Frequency (Actual)FRF : Brake Release
Frequency (Set)BF : Brake Operation Stand By Frequency (Set)BT :
Brake Operation Delay Time (Set)IF : Brake Release Current
(Set)
BDT : Brake Operation Delay Time (Actual)FHF : Brake Make Up
Frequency (Set)HF : Slip Down Prevention Frequency (Set)HT : Slip
Down Prevention Time (Set)
Closed
BF
FRF
Closed
Closed
Released
BT
BDT
IOUTIF
HT
BDT
HF
FTF
Speed Reference
(FWD) Run Command (F)
Output Frequency
Brake Release Command BR
Brake Release Check BX
Brake Operation Closed
Released
Released
Released
-
82
()
M B M C
9 10
R(L1)
S(L2)
T(L3)
1
3
*
*
2k
2k
2k
P P
P
S1
S2
S3
S4
S5
S6
S7
S8
S9
S10
S11
S12
SC
(0V)
E(G )
PR
A1
A2
A3
AC
0V
C 4
P4
C 3
P3
P2
P1
PC
48V50m A
AC250V1A
DC 30V1A
FLT
BR
( )
AC250V1A
DC 30V1A
M A
M B
M C
M 1
M 2
1
2
AF
AC
AM
(3)
U(T1)
V(T2)
W (T3)
1
2
1 2
()
Varispeed
1
(a)
2
Connection Diagram for CranesEmergency Main Switch
MS Master Switch
MC Main Circuit Conductor
F FWD Run Command
R REV Run Command
B Brake Conductor
BBX Brake Applying Command
BX Brake Release Check
: Twisted pair-shielded cable
Braking Resistor Unit (Optional)
Varispeed G7
Class 3 Grounding (100 or more)
Multifunction Terminal
External Fault
Fault Reset
Multi-speed Ref 1Multi-speed Ref 2
Multi-speed Ref 3Not Used
Sequence CommonInsulated from (0V) terminal.
Shielded Sheath Cable Connection Terminal
Brake Release Command (Brake released at closed)250 VAC, 1 A or
less30 VDC, 1 A or less
Fault Contact Output250 VAC, 1 A or less30 VDC, 1 A or less
Multifunction PHC Output48 V, 50 mA or less
ONOFF
R
E
V
R
u
n
S
t
o
p
F
W
D
R
u
n
Brake Applying CommandBrake Self-holding
M1 M2
Brake Release Check
Accel/decel Time Selection 1
Emergency Stop (NO Contact)
External Baseblock *
* External baseblock signal baseblock at closed.
*
FWD Run/StopREV Run/Stop
Analog Monitor 2
Analog Monitor 1
Multifunction Analog Output
Note *
-
83
Spindle
X-axisCore Clamper
Z-axis
Motor
Similar Machines
PolishersGrindersSmall lathesPlano miller feedersMilling
machinesDrilling machinesPresses
Functions AvailableBlade cutting loss prevention Wide range of
constant output powerControl by digital inputs Vibration
control
Principle Diagram of Lathe
-
84
Elevator Application
Sheave
Vector Control PWM Inverter
Braking Resistor, Braking Transistor (Externally
Mounted)Inverter Section Converter Section
Induction Motor
C
u
r
r
e
n
t
D
e
t
e
c
t
i
o
n
AC Reactor
Cage Calling Signal
Entrance Calling Signal
Speed FeedbackVector Control
Run Operation Signal
L
o
a
d
D
e
t
e
c
t
o
r
C
a
g
e
B
a
l
a
n
c
e
W
e
i
g
h
t
Elevator Controller
Operation Control
Torque Ref. Generated
Position Calculation Speed Ref. Generated
Speed/Position DetectionLoad Detection
3-phase AC Power Supply
PWM Control
Status Signal Fault Signal
AC Current Controller
Torque Compensation Speed Controller
Speed Ref.
Speed Reducer
Similar MachinesEscalatorsRope waysCable carsElectric
railcarsElectric automobiles
Functions AvailableImprovement of cage landing
frequencySoft-start with S-curve function Slip prevention at
start/stopBattery operation at a power failure
-
85
Chapter 6Inverter Drives Precautions
-
86
(a) Vertical (b) Horizontal (b) Side by Side
Installation
-
87
(a) Right and Left Space (b) Top and Bottom Space
MountingAmbient temperature:
-10 to 40
Ambient humidity:
90% RH or less
Vibration:
Less than 20 Hz
9.8 m/s2 or less
20 to 50 Hz
2 m/s2 or less
50mm or more
30mm or more 30mm or more50mm or more
120mm or more
120mm or moreAir
Air
-
88
Bottom Cover Mounting Screw
Remove the unit top and bottom covers for the 20HP (15 kW) or
less models (200-V class, 400-V class).
()
Totally-enclosed Type Control Panel Installation
CoolingFin
Totally-enclosed Type Control Panel
Top CoverIn-panel Air Temperature at Top: 10 to +55Cooling
Fin
Open chassis Type Inverter
Bottom CoverInverter Intake Air Temperature : 10 to +45
Ambient Temperature 40Bottom Cover
Top Cover(One-touch)Ambient temperature:
+14 to 113F
(-10 to 45 ) Ambient humidity:
90% RH or less
Vibration:
Less than 20 Hz
9.8 m/s2 or less
20 to 50 Hz
2 m/s2 or less
-
89
(a) Best Grounding
Inverter(1)
Inverter (2)
Inverter(3)
E E E
(b) Good Grounding
(c) Wrong Grounding
Inverter(1)
Inverter(2)
Inverter(3)
E E E
Inverter(1)
Inverter(2)
Inverter(3)
E E E
(A loop must not be made.)
Multiple Inverters Grounding
-
90
0 3 6 20 60
Continuous
100
807060
50
Frequency (Hz)
25%ED (or 15 minutes)40%ED (or 20 minutes)
60%ED (or 40 minutes)
90
Allowable Load Characteristics of Standard Motors
RunRun
StopR
T
ED 100R
T
T
o
r
q
u
e
(
%
)
-
91
Chapter 7 Harmonics, Noise & Surge Voltage
-
92
Noise Harmonics
Frequency Band High frequency (10 kHz or more) 40th to 50th
harmonics (up to several kHz)
Main Source Inverter section Converter section Transmission
Path
Electric wire (conduction) Space (radiation) Induction
(electrostatic,
electromagnetic
Electric wire
Influence Distance, wiring distance Line impedance Generating
Amount
Voltage variation ratio Switching frequency
Current capacity
Failure Sensor malfunction Radio noise
Overheat of capacitor for P.F improvement Overheat of
generator
Corrective Actions Change the wiring route. Install a noise
filter. Install INV. in a screened
box
Install a reactor. 12-phase rectification Sinusoidal wave power
regeneration
converter
Difference between Harmonics and Noise
-
93
C
o
m
m
e
r
c
i
a
l
P
o
w
e
r
+S
m
o
o
t
h
i
n
g
C
a
p
a
c
i
t
o
r
Converter Section
Motor
Bridge Rectifier
Harmonics Current Generated by Rectifier Circuit
Noise Generated by High-speed Switching
Harmonics and Noise Sources
Inverter Section
-
94
Fundamental Wave Current(at 50 or 60 Hz)
Harmonics Current(Example of 5th Level Harmonics)
(Amplitude Ratio: 0.3)
Distorted Wave Current
Fundamental Wave + Harmonics = Distorted Wave AC(Harmonics
Superimposed on Fundamental Wave)
0 pipi2
A
B
A+B
-
95
EDC
Converter
er es et
er-s er-t es-t es-r et-r et-s
Power Supply Phase Voltage
Ver-s
er
es
et
r
s
t
EDC (Without Capacitor)
Power Supply Line Voltage
Power Supply Current Waveform
Phase R ir
Phase Sis
Phase it
Generation of Harmonics Current
-
96
(Harmonics Current Suppression)(a) AC Reactor
+
Inverter
Motor
AC Reactor
C
o
m
m
e
r
c
i
a
l
P
o
w
e
r
(b) DC Reactor
+
Inverter
Motor
DC Reactor
CommercialPower
Reactor Connection
-
97
Radio
Machine
Inverter
Power Supply Transformer
Amplifier
Conductive noise : Noise that flows out through the power supply
line or grounding line Induction (electromagnetic,
electrostatic)
: Noise transmitted by electromagnetic or electrostatic
integration for the signal lines provided for the inverter main
circuit wiring
Radiation : Noise radiated into the air through the inverter,
motor unit, main circuit wiringthat work as antenna.
Noise Transmission Paths
Electronic Device
Sensor
-
98
Shielding (Steel) Plate Power LineSignal Line
Inverter M
Metallic Raceway Metallic Raceway
Wiring Separation by Rack or Duct
Induction Noise Suppression and Metallic Raceway
-
99
(a) Capacitive Filter (b) Inductive Filter (Zero-phase
Reactor)
Power Supply
P
o
w
e
r
S
u
p
p
l
y
(c) LC Filter
Conductive Noise Suppression
InverterInverter
Power Supply
Inverter
-
100
InverterInverter
0V(Common)
0V(Common)
Junction Terminal
Inverter Noise Prevention (Shielded Sheath Wire)
-
101
Motor
Progress and Reflection of Surge Voltage
(Leading Edge of One Pulse)
Inverter
Progressive Wave
Reflected Wave
Progressive wave reflects at the rapid changing point (motor
terminal section) of line impedance.
(Twice Surge VoltageApplied to Terminals)
-
102
Without Filter
(a) Test Circuit
[Inverter Output] [Motor Input]
(b) Result of Waveform Observation (5s/div, 250/div)
Expanded Diagram
With Filter
Inverter Output Motor Input
IM
Surge Voltage Suppression by Filter
Filter
Expanded Diagram
PWM Inverter
-
103
Filter
Motor Terminal Voltage(Without Filter )
Unless any filter is installed, surge voltage may be generated
at the motor terminal, which may affect motor insulation.
Motor
Motor Surge Voltage Suppression by Filter
PWM Inverter
~ ~
~
~ ~
~
-
104
The solution to 400V class inverter drive problems1. Low surge
voltage
Suppresses motor surge voltage, eliminating theneed for the
motor surge voltage protection.
2. Low electrical noise (Radiated, Conductive)3. Low acoustic
noise 4. Electrolytic corrosion of motor bearings due to shaft
voltage
Features of 3-level control
-
105
(b) Example of Shaft Voltage Measurement (between Shafts) (c)
Shaft Voltage Waveform
(Hz)
Commercial Power Supply Drives
Actual Measurement of Shaft Voltage
Commercial Power Drives
(Direct-coupling Side)(Opposite to Direct-coupling Side)
S
h
a
f
t
V
o
l
t
a
g
e
(
m
V
)
Inverter
Inverter Drives
V: Measuring DeviceR: Non-inductive Resistor (1k)
(Stator)(Rotor)
(a) Example of Shaft Voltage Measuring Circuit Inverter:
PWMMotor: 3.7 kW, 200 V, 4 polesV/f characteristics: Constant
torque
-
106
Chapter 8Maintenance and Inspection
-
107
Failure Patterns
Initial Failure Period
Accidental Failure Period Wear-out Failure Period
t
Specified Failure Ratio
Service Lifetime
F
a
i
l
u
r
e
R
a
t
i
o
(
t
)
0ta tb
-
108
Place Item Checking Item
Schedule
Daily
Periodical
1-yr 2-yr
Whole
Peripheral environment Ambient temperature, humidity, dust,
hazardous gases, oil mist, etc.
Whole unit No excessive vibration or noise.
Power supply voltage Check that main circuit voltage or control
voltage is normal.
Main Circuit
Whole
Megger check between main circuit terminal and ground
terminal
No loose connections
No traces of overheating in components
Clean.
Connected conductor,
Power supply
No distortion in conductor
No breakage or deterioration (cracks, discoloration, etc.) in
cables
Transformer, Reactor No odor, excessive beats or noise
Terminal stand No damages
Smoothing capacitor
No liquid leakage
No projection (safety valve) or bulge
Measure electrostatic capacity and insulation resistance.
Relay, Contactor
No chattering at operations
Timer operation time
No roughness on contacts
Resistor
No crack in resistor insulating material
No disconnection
Control Circuit,
Protective
Circuit
Operation check
Balance of output voltage between each phase by inverter
single-unit operation
No failure in protective or display circuit by sequence
protection test
Component
check
Whole
No odor or discoloration
No excessive corrosion
Capacitor No traces of liquid leakage or deformation
Cooling System Cooling fan
No excessive vibration or noise
No loose connections
Clean the air filter.
Display
Display
All lamps lights correctly.
Clean.
Meter Indicated values are correct.
(From JEMA Information)
Daily Inspection and Periodical Inspection
-
109
NameNameNameName
Standard Standard Standard Standard
Replacement PeriodReplacement PeriodReplacement
PeriodReplacement Period
MethodMethodMethodMethod
Cooling fanCooling fanCooling fa



![INVERTER DRIVES PRODUCT RANGE · 4 YASKAWA Inverter Drives Drive Selector 1 phase 3 phase Applicable motor Max. output [kW] Induction motor (IM) Permanent magnet motor (PM) Enclosure](https://img.pdfslide.us/doc/110x75/6005220642cce874457e0013/inverter-drives-product-4-yaskawa-inverter-drives-drive-selector-1-phase-3-phase.jpg)