Embed Size (px)
Citation preview
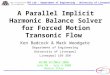
Proof of Thm 6.6 (cont.):
(1) Construct dual solution:
I Kruskal constructs MST T with edge set
I E (T ) = {f1, f2, . . . , fn�1}, and c(f1) c(f2) . . . c(fn�1)
I Every edge fk creates a new connected component Xk ✓ V by joining two smaller
connected components. Note that Xn�1 = V .
174 - 2
ties::D;¥naXyy
,
ire. fe E f ( Xu )
Define : px .= Ce Cfe ) - Ce Cfa ) 2 O
Pv =- C ( fu . , )
Ps = O for all other SEV
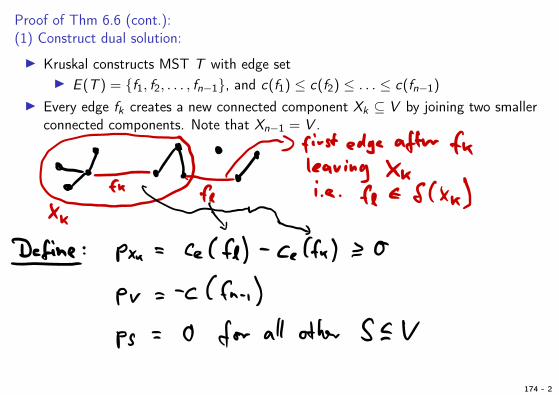
Proof of Thm 6.6 (cont.):
(2) Show that p is feasible for the dual:
I Sign constraints fulfilled by construction. minX
;6=S✓V
(|S| � 1)pS
s.t.X
S :e2�(S)
pS � �c(e) 8e 2 E
pS � 0 8; 6= S ⇢ V
pV free
174 - 3
-
s:{ eyes,Ps = %ec.ge ,
Ph
'
=Pxi t Pee
.
+ Pxe,
t. . .
t PuE sets containing e growing w
. v. t E
let Xi be the smallest such sets.
= Eifel- dfi )) t I effed - c Cfe.
)) -1. . .
+ [ dfa.it]
-
= - c Kfi ) fi either e -- fi Cie
. e will being , ,Z - e Ce )
⇒ Cle ) -- c Cf : )
or et fi⇒ e Cee) 's c Cfi )⇒ dual constraints are fulfilled
=) p is dual feasible
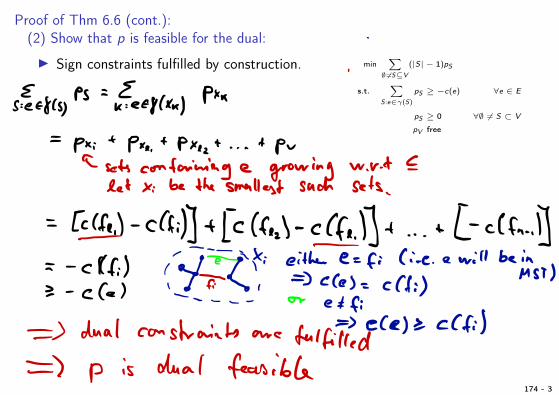
Proof of Thm 6.6 (cont.):
(3) Show that x⇤
and p fulfill complementary slackness conditions:
174 - 4
• XE so Cee ECT ) )⇒ E ps = - de )
seeks ,
• Ps to ⇒ S= Xk for some k
DEF'
S = vertex set of tree edges that
form a subtree of the finalMST
⇒ x CHS ) ) = 1st - I
⇒ primal slack = O
=) p and KA are optimal
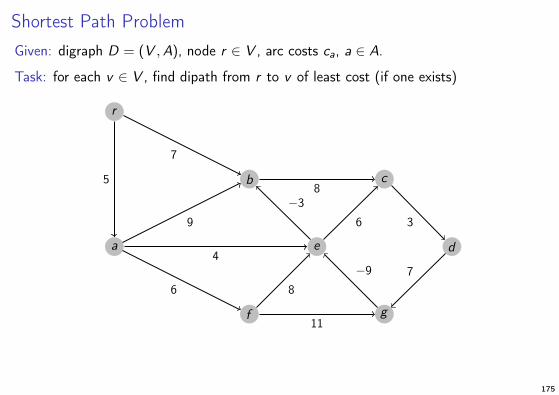
Shortest Path Problem
Given: digraph D = (V ,A), node r 2 V , arc costs ca, a 2 A.
Task: for each v 2 V , find dipath from r to v of least cost (if one exists)
r
d
b c
a e
f g
7
85
9�3
6
4
6 8�9
11
3
7
175
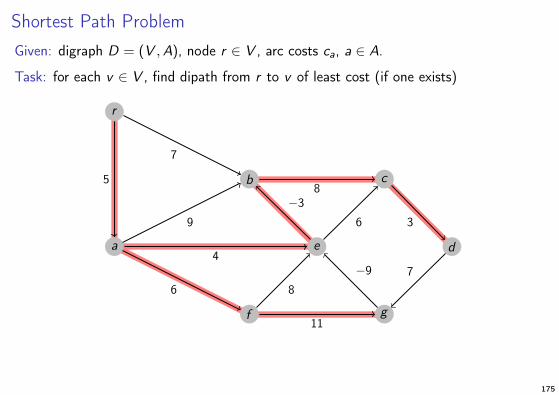
Shortest Path Problem
Given: digraph D = (V ,A), node r 2 V , arc costs ca, a 2 A.
Task: for each v 2 V , find dipath from r to v of least cost (if one exists)
r
d
b c
a e
f g
7
85
9�3
6
4
6 8�9
11
3
7
175
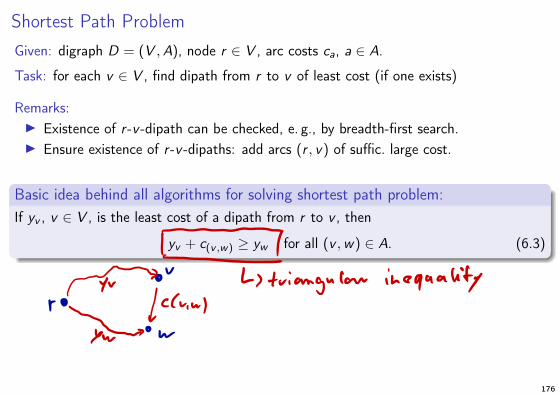
Shortest Path Problem
Given: digraph D = (V ,A), node r 2 V , arc costs ca, a 2 A.
Task: for each v 2 V , find dipath from r to v of least cost (if one exists)
Remarks:
I Existence of r -v -dipath can be checked, e. g., by breadth-first search.
I Ensure existence of r -v -dipaths: add arcs (r , v) of suffic. large cost.
Basic idea behind all algorithms for solving shortest path problem:
If yv , v 2 V , is the least cost of a dipath from r to v , then
yv + c(v ,w) � yw for all (v ,w) 2 A. (6.3)
Remarks:
I More generally, subpaths of shortest paths are shortest paths!
I If there is a shortest r -v -dipath for all v 2 V , then there is a shortest path tree,
i. e., a directed spanning tree T rooted at r such that the unique r -v -dipath in T is
a least-cost r -v -dipath in D.
176
Shortest Path Problem
Given: digraph D = (V ,A), node r 2 V , arc costs ca, a 2 A.
Task: for each v 2 V , find dipath from r to v of least cost (if one exists)
Remarks:
I Existence of r -v -dipath can be checked, e. g., by breadth-first search.
I Ensure existence of r -v -dipaths: add arcs (r , v) of suffic. large cost.
Basic idea behind all algorithms for solving shortest path problem:
If yv , v 2 V , is the least cost of a dipath from r to v , then
yv + c(v ,w) � yw for all (v ,w) 2 A. (6.3)
Remarks:
I More generally, subpaths of shortest paths are shortest paths!
I If there is a shortest r -v -dipath for all v 2 V , then there is a shortest path tree,
i. e., a directed spanning tree T rooted at r such that the unique r -v -dipath in T is
a least-cost r -v -dipath in D.
176
Shortest Path Problem
Given: digraph D = (V ,A), node r 2 V , arc costs ca, a 2 A.
Task: for each v 2 V , find dipath from r to v of least cost (if one exists)
Remarks:
I Existence of r -v -dipath can be checked, e. g., by breadth-first search.
I Ensure existence of r -v -dipaths: add arcs (r , v) of suffic. large cost.
Basic idea behind all algorithms for solving shortest path problem:
If yv , v 2 V , is the least cost of a dipath from r to v , then
yv + c(v ,w) � yw for all (v ,w) 2 A. (6.3)
Remarks:
I More generally, subpaths of shortest paths are shortest paths!
I If there is a shortest r -v -dipath for all v 2 V , then there is a shortest path tree,
i. e., a directed spanning tree T rooted at r such that the unique r -v -dipath in T is
a least-cost r -v -dipath in D.
176
M-
yaoi ↳ triangular inequalityros fccu.nl
¥70 w