Embed Size (px)
DESCRIPTION
A comparison of hybrid ensemble transform Kalman filter(ETKF)-3DVAR and ensemble square root filter (EnSRF) analysis schemes. Xuguang Wang NOAA/ESRL/PSD, Boulder, CO Thomas M. Hamill Jeffrey S. Whitaker NOAA/ESRL/PSD, Boulder, CO Craig H. Bishop NRL, Monterey, CA. Why hybrid ETKF-3DVAR ?. - PowerPoint PPT Presentation
Citation preview

A comparison of hybrid ensemble transform Kalman filter(ETKF)-3DVAR
and ensemble square root filter (EnSRF) analysis schemes
Xuguang WangNOAA/ESRL/PSD, Boulder, CO
Thomas M. HamillJeffrey S. Whitaker
NOAA/ESRL/PSD, Boulder, COCraig H. Bishop
NRL, Monterey, CA

Why hybrid ETKF-3DVAR ?
• Hybrid ETKF-3DVAR is expected to be less expensive than EnSRF, and still can benefit from ensemble-estimated error statistics.
• The hybrid may be more robust for small ensemble size, since can adjust the amount of static vs. ensemble covariance used.
• The hybrid can be conveniently adapted to the existing variational framework.

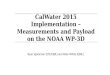
member 1 forecast
member 2 forecast
member 3 forecast
perturbation 1
perturbation 2
perturbation 3
ensemble mean ETKF-3DVAR update mean
ETKF update perturbations
updated mean
updated perturbation 3
updated perturbation 2
updated perturbation 1
member 1 analysis
member 2 analysis
member 3 analysis
member 1 forecast
member 2 forecast
member 3 forecast
data assimilation forecast
Hybrid ETKF-3DVAR

Hybrid ETKF-3DVAR updates mean
yxyxxxxx aTababTba HHJ 11
2
1
2
1RP
Pb 1 Pe B , 0 ≤ ≤ 1
Background error covariance is approximated by a linear combination of the sample covariance matrix of the ETKF forecast ensemble and the static covariance matrix.
yxxyxxvvvv bTbTT HHJ 12211 2
1
2
1
2
1R
2
2/1
12/1 1 vvx ePB
Can be conveniently adapted into the operational 3DVAR through augmentation of control variables (Lorenc 2003; Buehner 2005; Wang et al. 2006).
B static background error covariance weighting coefficient eP ensemble covariance 1v standard 3DVAR control variables
Pb hybrid covariance 2v extended control variables

ETKF updates perturbations• ETKF transforms forecast perturbations into analysis
perturbations by
where is chosen by trying to solve the Kalman filter error covariance update equation, with forecast error covariance approximated by ensemble covariance.
• Latest formula for (Wang et al. 2004;2006, MWR)
• Computationally inexpensive for ensemble size of o(100), since transformation fully in perturbation subspace.
TCIΓCT 2/1
TXX ba
bXaX
T
T
C and Γcontain eigenvectors and eigenvalues of the KK (ens. size)
matrix )1/(1 KbTTb HXRHX ; is the estimated fraction of forecast error variance projected onto ensemble subspace

Experiment design
• Observations362 Interface and surface Exner functions taken at equally spaced locations
Observation values are T31 truth plus random noise drawn from normal distribution
Assimilated every 24h
• Numerical model Dry 2-layer spectral PE model run at T31;
Model state consists of vorticity, divergence and layer thickness of Exner function
Error doubling time is 3.78 days at T31
Perfect model assumption
(Hamill and Whitaker MWR, 2005)

Experiment design
In this experiment, the hybrid updates the mean using
bTbTbba xyxx HRHHPHP 1
TTeTb BHHPHP 1
TTeTb HBHHHPHHP 1
whose solution is equivalent to that if solved variationally under our experiment design.
The static error covariance model is constructed iteratively from a large sample of 24h fcst. errors.
• Update of mean (OI) and formulation of B
First estimate BHT and HBHT is constructed from 250 24h fcst. errors with covariance localization (iteratively)
Run a huge number of DA cycles (7000 > number of model dimension) with BHT and HBHT
Construct BHT and HBHT with this huge sample of 24h forecast errors

RMS analysis errors: 50 member
• Improved accuracy of EnSRF over 3DVAR can be mostly achieved by the hybrid.
• Covariance localization applied on the ETKF ensemble when updating the mean (but not applied when updating the perturbations) improved the analyses of the hybrid.

RMS analysis errors: 20 member
• Both 20mem hybrid and EnSRF worse than 50mem, but still better than 3DVAR
• Hybrid nearly as accurate (KE, 2 norms) or even better (surface norm) compared to EnSRF

RMS analysis errors: 5 member
• EnSRF experienced filter divergence for all localization scales tried.
• Hybrid was still more accurate than the 3DVAR.
• Hybrid is more robust in the presence of small ensemble size.
EnSRF filter divergence

Comparison of flow dependent background error covariance models
(Hybrid 50 mem. result) (EnSRF 50 mem. result)

Initial-condition balance
(50 mem. result)
• Analysis is more imbalanced with more severe localization.
• Analyses of the hybrid with the smallest rms error are more balanced than those of the EnSRF, especially for small ensemble size (not shown).

Spread-skill relationships
(20 mem. result)
• Overall average of the spread is approximately equal to overall average of rms error for both EnSRF and Hybrid.
• Abilities to distinguish analyses of different error variances are similar for EnSRF and Hybrid.

Summary
• The hybrid analyses achieved similar improved accuracy of the EnSRF over 3DVAR.
• The hybrid was more robust when ensemble size was small.
• The hybrid analyses were more balanced than the EnSRF analyses, especially when ensemble size was small.
• The ETKF ensemble variance was as skillful as the EnSRF.
• The hybrid can be conveniently adapted into the existing operational 3DVAR framework.
• The hybrid is expected to be less expensive than the EnSRF in operational settings.

Preliminary results with resolution model error
• T127 run as truth; imperfect model run at T31
• 200-member ensembles
• Additive model error parameterization
• comparable rms errors for hybrid and EnSRF

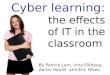
BUFRyo
OBS PROC
yo
VARXb Xa
ETKFPb
mean
gen_be
VAR da_ntmax=0
sum
Xf1
….
XfK
H(Xf1)
….
H(XfK)
δXf1
….
δXfK
Xa1
….
XaK
WRF
Hybrid ETKF-3DVAR for WRF(collaborated with Dale Barker and Chris Snyder)
• α-control variable method (Lorenc 2003) to incorporate ensemble in WRF-VAR

Statistics of iteratively constructed B
rms analysis errors
balance

Ensemble square-root filter(Whitaker and Hamill,MWR,2002)
es
b PP ρ
1 RHHPHPK TbTb
bba H xyxx K
• Background error covariance is estimated from ensemble with covariance localization.
• Mean state is corrected to new observations, weighted by the Kalman gain.
• Reduced Kalman gain is calculated to update ensemble perturbations.
• Observations are serially processed. So cost scales with the number of observations.
KRHHP
RK
1
1~
Tb
bba H ''' ~xxx K
sρ correlation matrix
K Kalman gain matrix K~
reduced Kalman gain matrix a'x analysis ensemble perturbation b'x forecast ensemble perturbation
• Covariance localization can produce imbalanced initial conditions.
EnSRF EnSRF
obs1 obs2
EnSRF
obs3

Maximal perturbation growth
• Find linear combination coefficients b to maximize
• Maximal growth in the ETKF ensemble perturbation subspace is faster than that in the EnSRF ensemble perturbation subspace.
bb
bbaTaT
bTbT
SXX
SXX