Embed Size (px)
Citation preview

© 2014 –Hyorin Park, xS3D lab – September 11, 2014
Analysis of the resources required for persistent robotic service
Hyorin Park
September 11, 2014
xS3D lab fall seminar

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 2 -
Contents
• Motivation
• Literature review
• Problem description
• Mathematical model – Embedded Petri net model
• Solution approaches– Enumeration method
– Heuristic approach
• Concluding remark

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 3 -
Contents
• Motivation
• Literature review
• Problem description
• Mathematical model – Embedded Petri net model
• Solution approaches– Enumeration method
– Heuristic approach
• Concluding remark

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 4 -
Motivation
• Unmanned aerial vehicles(UAVs) are used various fields
• Recently, companies have interest about UAV
– Amazon (Delivery service)
– SECOM (Surveillance)
– Gofor (Tracking & record service)
• Companies use relatively small size of UAV due to economic reason
• Small size UAV has fuel limitation when it provides persistent service

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 5 -
Motivation
• What is the persistent service?– UAV has fundamental limitation : Fuel capacity
– Services such as patrol, monitoring, and surveillance require continuous service.
– Surveillance example
?

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 6 -
Motivation
• Objective : deriving the number of resources & service path to provide persistent UAV service with multiple immobile customers
• Example
– Surveillance of disaster(biohazard) site
– Temporary traffic enforcing during holiday

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 7 -
Contents
• Motivation
• Literature review
• Problem description
• Mathematical model – Embedded Petri net model
• Solution approaches– Enumeration method
– Heuristic approach
• Concluding remark

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 8 -
• Literature review
Literature review
Literature Persistent service
ResourceAnalysis
Pathplanning
Stochastic
note
Muller(1983) √
Min(2010) √ √
Enright(2005) √ √
Bethke(2005) √ Immobile customer
Valenti(2007) √ √ Not systematic approach
Suzuki(2012) √ System coverage concept
Song(2013) √ Moving customer
Kim(2014) √ System design
This research √ √ √

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 9 -
Contents
• Motivation
• Literature review
• Problem description
• Mathematical model – Embedded Petri net model
• Solution approaches– Enumeration method
– Heuristic approach
• Concluding remark

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 10 -
Problem description
• How much UAV do we need to provide persistent service?
-400
-300
-200
-100
0
100
200
300
400
-400 -300 -200 -100 0 100 200 300 400

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 11 -
Problem description
• How much UAV do we need to provide persistent service in a region?
Station
1. Generate paths
3. Calculate resourcesfor derived path
2. UAVs provide persistent service in this paths
?

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 12 -
Problem description
• Multiple traveling salesmen problem (mTSP)
– Every customer should be visited
by one salesman
– Every salesman should start from depot
and return to depot
– Minimize total traveling distance.
• Different point against mTSP– At least 1 UAV should stay at each target point during entire service
duration
– Different objective function (minimize number of resource)
– Fuel constraint

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 13 -
Contents
• Motivation
• Literature review
• Problem description
• Mathematical model – Embedded Petri net model
• Solution approaches– Enumeration method
– Heuristic approach
• Concluding remark

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 14 -
Goal of the mathematical models
• We made mathematical model to
– Derive the minimum number of resources
– Generate path to provide persistent service with derived number of resources
• Objective function : minimize the number of resources for persistent system

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 15 -
Mathematical model
• Notation– n : number of the customers
– V : customer set
– 𝑇𝐹:maximum flight time of the UAV
– 𝑇𝑅:recharging time of the platform
– 𝐹𝑆:flight speed of the UAV
– 𝑑𝑖𝑗:distance from customer i to customer j
1 : if service loop k contain the arc from i to j
– 𝑥𝑖𝑗𝑘
0 : otherwise
loop3
1
2

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 16 -
Development of objective function
• To develop the objective function– We use decision-free Petri net model
• Periodicity
• Easy to analyze
– Petri net model is embedded into objective function

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 17 -
Development of objective function
• Decision-free Petri net model of determined path

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 18 -
Model for 1 and 2 customers cases
• Petri net model for 1 and 2 customers cases

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 19 -
Proposition
• Proposition 1 : The system needs minimum number of resources when all of the paths are straight.
• Proposition 2 : The system needs minimum number of UAV when UAV has no unnecessary idle time.
• Proposition 3 : The system needs minimum number of UAV when one UAV serve the customer.
• Proposition 4 : With fixed path, minimal resources are required when each UAV visits every customer for same duration.
– Total service time : 1 2 3 4 nn-1…

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 20 -
Development of objective function
• Service time of each customer
• Minimum number of resources for n customers loop
– Number of UAV𝑛𝐹𝑆(𝑇𝐹+𝑇𝑅)
𝐹𝑆𝑇𝐹−(𝑑1+𝑑2+⋯+𝑑𝑛+1)≤ 𝑁𝑈𝐴𝑉
– Number of platform𝑛𝐹𝑆𝑇𝑅
𝐹𝑆𝑇𝐹−(𝑑1+𝑑2+⋯+𝑑𝑛+1)≤ 𝑁𝑝𝑙𝑎𝑡
– Number of battery
𝑛𝐹𝑆(𝑇𝐹 + 𝑇𝑅)
𝐹𝑆𝑇𝐹 − (𝑑1 + 𝑑2 +⋯+ 𝑑𝑛+1)≤ 𝑁𝑏𝑎𝑡𝑡 (Recharging platform)
𝑛𝐹𝑆(𝑇𝐹 + 𝑇𝑅)
𝐹𝑆𝑇𝐹 − (𝑑1 + 𝑑2 +⋯+ 𝑑𝑛+1)+
𝑛𝐹𝑆(𝑇𝑐 + 𝑇𝑅)
𝐹𝑆𝑇𝐹 − (𝑑1 + 𝑑2 +⋯+ 𝑑𝑛+1)≤ 𝑁𝑏𝑎𝑡𝑡 (Replacement platform)

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 21 -
Mathematical model : number of UAV
Min
𝑘=1
𝑛 𝑖=0𝑛 𝑗=0
𝑛 𝑥𝑖𝑗𝑘 𝑇𝐹 + 𝑇𝑅 𝐹𝑆
𝑇𝐹𝐹𝑆 − 𝑖=0𝑛 𝑗=0
𝑛 𝑑𝑖𝑗𝑥𝑖𝑗𝑘
s.t.
𝑗=0
𝑛
𝑥0𝑗𝑘 = 1∀𝑘 (1)
𝑖=0
𝑛
𝑥𝑖0𝑘 = 1∀𝑘 (2)
𝑖=0
𝑛
𝑘=1
𝑛
𝑥𝑖𝑗𝑘 = 1∀𝑗 ∈ 𝑉 (3)
𝑖=0
𝑛
𝑥𝑖𝑗𝑘 −
𝑖=0
𝑛
𝑥𝑗𝑖𝑘 = 0∀𝑗, 𝑘 (4)

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 22 -
Mathematical model : number of UAV(cont.)
𝑖=0
𝑛
𝑗=0
𝑛
𝑑𝑖𝑗𝑥𝑖𝑗𝑘 ≤ 𝑇𝐹𝐹𝑆∀𝑘 (5)
𝑢𝑖 − 𝑢𝑗 + 𝑛
𝑘=1
𝑛
𝑥𝑖𝑗𝑘 ≤ 𝑛 − 1𝑖 ≠ 𝑗 = 1,⋯ , 𝑛 (6)
𝑥𝑖𝑗𝑘 ∈ 0,1 ∀𝑖, 𝑗, 𝑘 (7)
𝑢𝑖 𝑖𝑠 𝑖𝑛𝑡𝑒𝑔𝑒𝑟 ∀𝑖 (8)
• Persistent service is embedded into objective function

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 23 -
Contents
• Motivation
• Literature review
• Problem description
• Mathematical model – Embedded Petri net model
• Solution approaches– Enumeration method
– Heuristic approach
• Concluding remark

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 24 -
Solution approaches
• Non-smooth objective function with integer decision variables– Cannot use commercial software
• Enumeration approach– Search all possible cases
– Give the optimal solution
– Computational time issue
• Heuristic– Based on saving algorithm (Clark and Wright, 1964)
– Give optimal or near optimal solution
– Reasonable computation time

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 25 -
• Find all possible cases
• Steps– 1. Set separating problem : Search all possible set of customers
– 2. Sequence finding problem : Search all possible sequence of determined set
Solution approaches: Enumeration
…
…

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 26 -
Contents
• Motivation
• Literature review
• Problem description
• Mathematical model – Embedded Petri net model
• Solution approaches– Enumeration method
– Heuristic approach
• Concluding remark

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 27 -
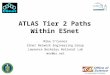
Solution approaches: Heuristic
• Relationship between distance and required number of resources
• The number of required resources is exponentially increase when the traveling distance approach to the maximum flight distance
𝑇𝐹 = 600, 𝑇𝑅 = 600, 𝐹𝑆 = 4 , maximum flight distance = 2400)

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 28 -
Solution approaches: Heuristic
• Based on saving algorithm– Heuristic for vehicle routing problem
– Finding minimum traveling distance(this is bad for out model)
• Add the modified distance constraint– At first, we use maximum flight distance for virtual limit
• Adjust virtual limit– Gradually reduce/increase virtual limit
– Repeat modified saving algorithm to find best solution until the iterations reach the preset number.
– Make the solution converge to the specific point

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 29 -
Solution approaches: Heuristic
• Pseudo code of the heuristic to derive number of UAV1 Find the Euclidian distance from customer(station) i to customer(station) j (set)
2 Set input parameters(flight time, recharging time, flight speed)
3 Set best_value ← big M, p ← 1, r ← 0.1, constraint of distance D ← maximum flight distance
4 while current iteration is not equal to preset number of iteration do
5 Calculate p+(up+down)*r
6 if p>1 do
7 continue;
8 else
9 p ← p+(up+down)*r;
10 D ← D*p;
11 Execute saving algorithm with constraint D and dij information
12 For all service loop do
13 Calculate𝑛𝐹𝑆(𝑇𝐹+𝑇𝑅)
𝐹𝑆𝑇𝐹−(𝑑1+𝑑2+⋯+𝑑𝑛+1)as required UAV for service loop
14 current total required UAV ← sum of UAV of each service loop
15 Initialization of former up, and down value to 0
16 if current total required UAV < best_value do
17 Best_value ← current total required UAV
18 Down ← 1;
19 else
20 Up ← 1
21 r←r*0.95;
22 Output the minimum number of required UAV for system

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 30 -
Numerical example
• Comparison between solution approaches
Number of
customers
Enumerative method Heuristic
Objective
value GapNumber of
UAV
Computation
time (sec)
Number of
UAV
Computation
time(sec)
3 19 <0.05 19 <0.05 0
4 25 <0.05 25 <0.05 0
5 30 0.1 30 <0.05 0
6 36 0.1 36 <0.05 0
7 43 1.2 43 <0.05 0
8 49 17 50 <0.05 2%
9 56 476 57 <0.05 1.7%
10 62 14631(>4h) 63 <0.05 1.6%

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 31 -
Numerical example
• Result of heuristic for large size problem
Number of
customers
Enumerative method Heuristic
Number
of UAV
Computation
time(sec)
Number
of UAV
Computation
time(sec)
50 - - 309 0.4
100 - - 622 2
200 - - 1230 23.26
500 - - 3085 587.86
1000 - - 6141 15081.69

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 32 -
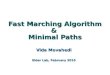
Numerical example
• How much UAV do we need to provide persistent service?– We need 39 UAVs to provide persistent service
-400
-300
-200
-100
0
100
200
300
400
-400 -300 -200 -100 0 100 200 300 400

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 33 -
Numerical example
• How much UAV do we need to provide persistent service?
-400
-300
-200
-100
0
100
200
300
400
-400 -300 -200 -100 0 100 200 300 400
39
56
59
34
23
211
ⅹ

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 34 -
Mathematical model : multiple station
Min
𝑘=1
𝑛 𝑖=1𝑛 𝑗=1
𝑛 𝑥𝑖𝑗𝑘 𝑇𝐹 + 𝑇𝑅 𝐹𝑆
𝑇𝐹𝐹𝑆 − 𝑖=1𝑛+𝑚 𝑗=1
𝑛+𝑚 𝑑𝑖𝑗𝑥𝑖𝑗𝑘
s.t.
𝑗=1
𝑛+m
𝑥h𝑗𝑘 = 1∀𝑘; ℎ = 𝑛 + 1,⋯ , 𝑛 + 𝑚 (1)
𝑖=1
𝑛+m
𝑥𝑖h𝑘 = 1∀𝑘; ℎ = 𝑛 + 1,⋯ , 𝑛 + 𝑚 (2)
𝑖=1
𝑛+m
𝑘=1
𝑛
𝑥𝑖𝑗𝑘 = 1∀𝑗 ∈ 𝑉 (3)
𝑖=1
𝑛+m
𝑥𝑖𝑗𝑘 −
𝑖=1
𝑛+m
𝑥𝑗𝑖𝑘 = 0∀𝑗, 𝑘 (4)

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 35 -
• 1, ⋯, n : customer index; n+1,⋯, n+m : station index
Mathematical model : multiple station(cont.)
𝑖=1
𝑛+m
𝑗=1
𝑛+m
𝑑𝑖𝑗𝑥𝑖𝑗𝑘 ≤ 𝑇𝐹𝐹𝑆∀𝑘 (5)
𝑢𝑖 − 𝑢𝑗 + 𝑛
𝑘=1
𝑛
𝑥𝑖𝑗𝑘 ≤ 𝑛 − 1𝑖 ≠ 𝑗 = 1,⋯ , 𝑛 (6)
𝑥𝑖𝑗𝑘 = 0 𝑖 ≠ 𝑗 = 𝑛 + 1,⋯ , 𝑛 + 𝑚, ∀𝑘 (7)
𝑥𝑖𝑗𝑘 ∈ 0,1 ∀𝑖, 𝑗, 𝑘 (8)
𝑢𝑖 𝑖𝑠 𝑖𝑛𝑡𝑒𝑔𝑒𝑟 ∀𝑖 (9)

© 2014 –Hyorin Park, xS3D lab – September 11, 2014 - 36 -
Concluding remarks
• For the commercial reason, resource analysis is needed
• Deriving the minimum number of resources and service paths
• Mathematical model is developed
• To solve the problem, enumerative method and heuristic is developed
• General mathematical model is developed
• In the future, solving method for multiple station case should be developed