Embed Size (px)
Citation preview

Wireless Sensor Project
Search Triangulation Aerial
Rescue Team (START)
Search Triangulation Aerial Rescue Team (START)
Sarah Kovach – Introduction/Market ResearchJason Schoenbaechler – System OverviewKevin Yu – Stargate/DSPAntonius Ismanto – Microcontroller/ConclusionAdam Porr – Audio DetailsAndrew Gilleon – GPS/Triangulation/User Interface
Our Objective is to improve search and rescue capabilities
with an aerial wireless sensor network

Market Research
Similar Product – Avalanche BeaconCompanies already in the market include Ortovox,
Pieps, and Barryvox
Disadvantages • Price on average is about $200-$400
(needing at least 2 beacons to be effective)• Range is very narrow (~20-30 meters)
Advantages to Our Design• Price could be cut to as low as $242• Range will cover several square miles
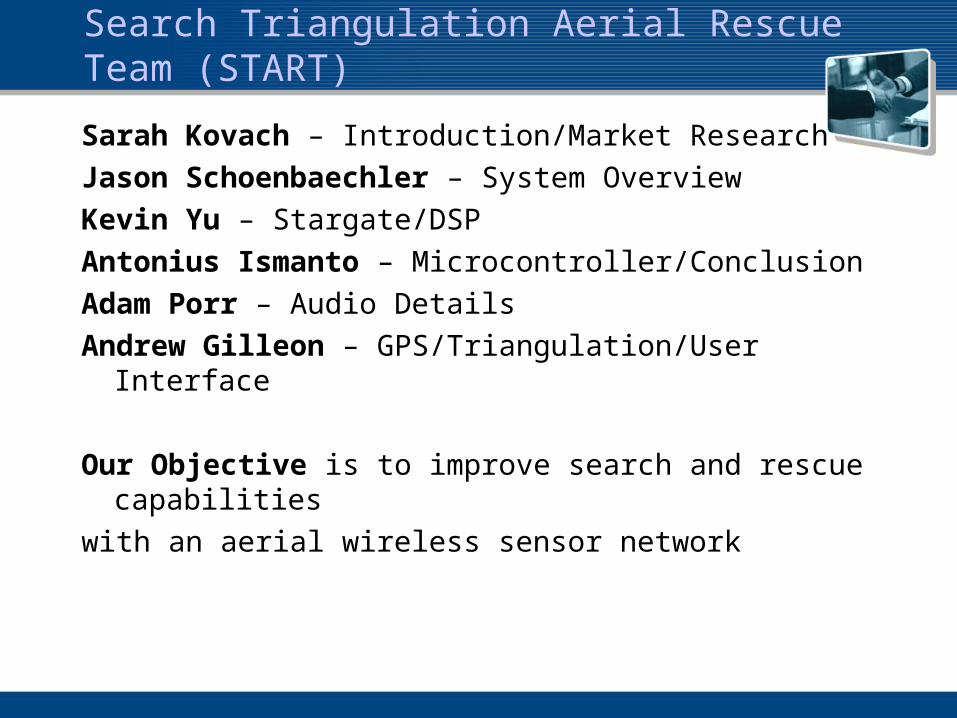
System Overview
• Stargate Node
• Sensors
• User Interface

System Overview
• Stargate Node• DSP Functions• Communication• Power • Distribution
• Sensors• GPS• Audio• Expansion Port

Digital Signal processing (DSP)
• signals come from the real world - this intimate connection with the real world leads to many unique needs such as the need to react in real time and a need to measure signals and convert them to digital numbers
• signals are discrete - which means the information in between discrete samples is lost
• digital systems can be reprogrammed for other applications
• digital systems do not depend on strict component tolerances
• digital system responses do not drift with temperature

DSP cont.
OtherNode
OtherNode
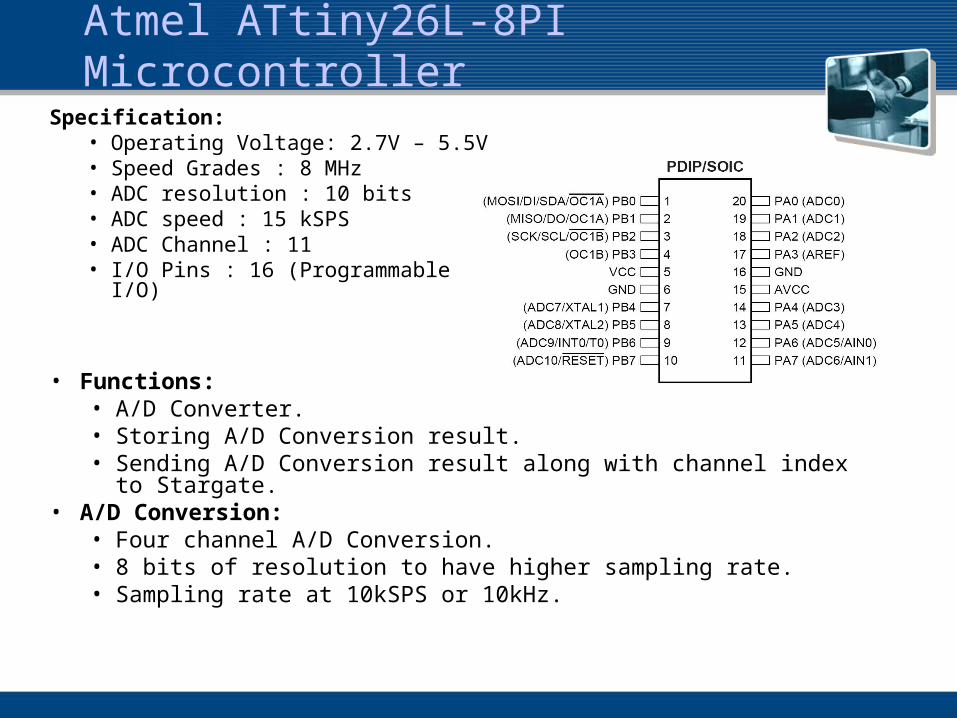
Atmel ATtiny26L-8PI Microcontroller
Specification:• Operating Voltage: 2.7V – 5.5V• Speed Grades : 8 MHz• ADC resolution : 10 bits• ADC speed : 15 kSPS• ADC Channel : 11• I/O Pins : 16 (Programmable
I/O)
• Functions:• A/D Converter.• Storing A/D Conversion result.• Sending A/D Conversion result along with channel index to
Stargate.• A/D Conversion:
• Four channel A/D Conversion.• 8 bits of resolution to have higher sampling rate.• Sampling rate at 10kSPS or 10kHz.

Atmel Flowchart & Schematic

Acoustic Beamforming - Overview
• Phased array of 4 omnidirectional microphones• Microphones arranged on 4 corners of a square• Works like a directional microphone• Can form a directional “beam” in 3 dimensions• Makes use of constructive and destructive
interference:• Signals within beam are added in-phase• Signals outside beam are added out-of-phase
• Frequency range limited by microphone spacing• Better than linear array (no azimuthal
ambiguity)
Acoustic Beamforming – Details
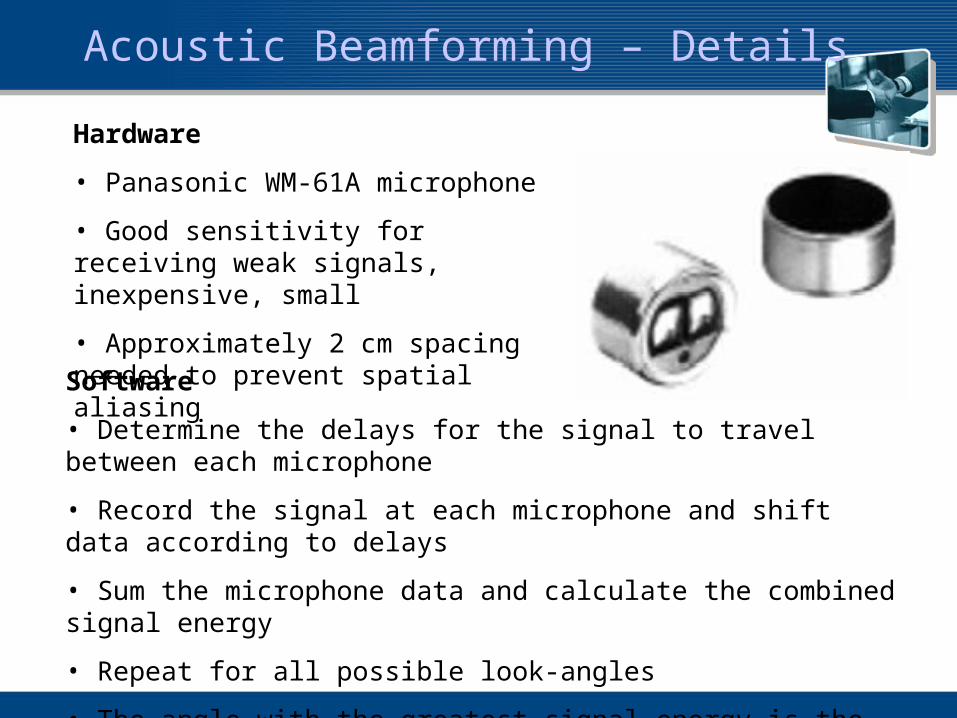
Hardware
• Panasonic WM-61A microphone
• Good sensitivity for receiving weak signals, inexpensive, small
• Approximately 2 cm spacing needed to prevent spatial aliasingSoftware
• Determine the delays for the signal to travel between each microphone
• Record the signal at each microphone and shift data according to delays
• Sum the microphone data and calculate the combined signal energy
• Repeat for all possible look-angles
• The angle with the greatest signal energy is the direction of arrival

Acoustic Beamforming – Geometry

GPS Sensor
• Garmin GPS 15L• Compact
• 1.4”x1.8”x0.3”• 0.50 oz.
• Accurate• WAAS enabled• Position to 3m• Velocity to 0.1 knot
• Low Power• 85mA @ 3.3V
• Serial Interface• NMEA 0183 standard

Triangulation
• Nodes transmit position information• Longitude and Latitude• Altitude• Velocity• Signal Direction
• Nodes collect position information• Node performs independent triangulation• Result can be used for guidance

Triangulation
• Calculation is performed between two nodes• Based on:
• Positions• Velocity• Signal Direction
• Equations• Pythagorean theorem• Law of Sines
B
A
C
b
c
a
c
C
b
B
a
A sinsinsin
User Interface
• Passive System• User computer can “listen” to nodes• Graphical interface:
• List of available nodes and status• Mapping shows:
• Node locations• Triangulation result
• Can be implemented on portable systems• Laptops• Tablet PCs• PDAs

Conclusion
Flexibility• Increase number of microphone in the array to get
better direction and triangulation using the same microcontroller.
• Expansion in sensors, such as temperature and wind speed.
• Able to be used in remote area without too much setup.
Potential problems / issues• Microphones blind spot.• Memory capacity for storing A/D conversion result.• Lost of data due to A/D conversion multiplexing.

Questions