Embed Size (px)
Citation preview

WIRELESS MESH NETWORKS: PROTOCOL DESIGN AND
PERFORMANCE EVALUATION
A DISSERTATION
SUBMITTED TO THE DEPARTMENT OF ELECTRICAL
ENGINEERING
AND THE COMMITTEE ON GRADUATE STUDIES
OF STANFORD UNIVERSITY
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS
FOR THE DEGREE OF
DOCTOR OF PHILOSOPHY
Hyunok Lee
March 2010

http://creativecommons.org/licenses/by-nc/3.0/us/
This dissertation is online at: http://purl.stanford.edu/kx780hc2331
© 2010 by Hyunok Lee. All Rights Reserved.
Re-distributed by Stanford University under license with the author.
This work is licensed under a Creative Commons Attribution-Noncommercial 3.0 United States License.
ii

I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
Donald Cox, Primary Adviser
I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
John Cioffi
I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
Fouad Tobagi
Approved for the Stanford University Committee on Graduate Studies.
Patricia J. Gumport, Vice Provost Graduate Education
This signature page was generated electronically upon submission of this dissertation in electronic format. An original signed hard copy of the signature page is on file inUniversity Archives.
iii

Abstract
With the increasing interest in multi-hop wireless communications networks, wire-
less mesh networks (WMNs) have emerged as an affordable and scalable solution to
provide broadband packet data communications across wide geographic areas. How-
ever, due to the prohibitive complexity of analysis and simulations, studies on WMNs
for large-scale applications have often oversimplified the physical and/or networking
models.
In this thesis, based on more realistic physical and networking models, we study
the performance of large-scale WMNs that serve as access networks over large geo-
graphic areas. First, we create a new set of medium access control (MAC) protocols
that incorporate such models. The protocols are designed within a time division mul-
tiple access (TDMA) and time division duplex (TDD) framework. Utilizing separate
resources for control and data packets, the protocols provide mechanisms for network
entities to explicitly cooperate among themselves for resource allocation in a fully
distributed and adaptive manner.
We also develop a large WMN simulator that implements the protocols and sup-
ports measurement-based models for radio propagation and interference calculation
for a large built-in urban area. The simulator also captures the stochastic network
behavior resulting from random traffic arrivals, admission control, and queueing. The
enormous size and computational complexity of the simulator is addressed using a
parallel-processing simulation technique that utilizes multiple processors intercon-
nected with high-speed links and associated with large high-speed memory.
Through extensive simulations incorporating such details, the performance of the
WMNs is assessed under various simulation scenarios. First, it is demonstrated that
iv

an effective admission and congestion control (ACC) policy is critical to support stable
user throughput under heavy traffic loads, and one of the ACC policies created in
the thesis is shown to stabilize the network even under heavy traffic loads. Then, the
scalability of the WMNs is investigated under different scenarios of network topology
and routing metrics. The scalability behavior of several fundamental performance
metrics is examined including the network throughput, per-session throughput, and
blocking and dropping rates. Major factors are identified across the physical, MAC
and routing layers that affect the scalability behavior, and the factors are shown
to interact with one another in a complicated manner to determine the network
performance. With more backbone support to the network, the network throughput
and per-session throughput are shown to improve significantly, and the improvement
is explained based on the aforementioned interactions across the layers of the network.
The overall network performance is shown for two different routing metrics.
v

Acknowledgment
First of all, I would like to express my deep gratitude to my advisor Professor Donald
C. Cox for his continuous and consistent support, guidance, and encouragement.
I sincerely thank him for his endeavor to secure financial support for most of my
Ph.D. years. I also thank him for his innumerable hours for discussions with me.
Those discussions repeatedly inspired me to tackle problems from fresh, different, and
greater perspectives. I am also grateful for his continuous encouragement that kept
me to develop the large-scale wireless mesh network simulator presented in this thesis.
Without his encouragement, I would not have been able to study the wireless mesh
networks as thoroughly. I also thank him for his careful and invaluable suggestions
for this dissertation.
I also would like to thank Professor John Cioffi for his serving as my oral and
reading committee member as well as serving as my associate advisor for my Ph.D. I
also thank Professor Fouad Tobagi for his serving as my oral and reading committee
member and for his helpful suggestions for this dissertation. I also thank Professor
John Pauly for serving as my oral chairperson.
I thank Dr. Nim Cheung. He supported me to work on the project on parallel-
processing simulation techniques that eventually became an indispensable tool for my
large-scale simulations of the wireless mesh networks presented in this thesis. He also
helped me with writing an extensive research proposal that later became a basis for
my thesis research.
I wish to thank the government of Republic of Korea for the Information and
Telecommunication National Scholarship that partially supported my M.S. and the
first two years of my Ph.D. at Stanford University. My research was also supported
vi

in part by the National Science Foundation (NSF), Ericsson Inc., and the Center
for Integrated Systems (CIS) at Stanford University. The US Army Research Office
supported the acquisition of the supercomputing platform on which my large-scale
parallel simulations have been run.
During my years with the Wireless Communications Research Group, I have
greatly benefited from many interactions and discussions with my former and cur-
rent group members: Ali Faghfuri, Dana Porrat, Hichan Moon, Karen Tian, Kerstin
Johnsson, Mark Smith, Mehdi Soltan, Persefoni Kyritsi, Qinfan Sun, Ravi Narasimhan,
Raymond Wang, Tom McGiffen, Wonchae Kim, and Yasimin Mostofi. I also thank
Professor Homayoun Hashemi for his encouragement and feedback on my research
presentations. I also thank Bernadette Aguiao, Pat Oshiro, and late Joice Debolt for
their administrative help. I also benefited from interactions and discussions with my
colleagues and co-authors Vahideh Manshadi, Alex Shaw, Gordon Wong, and Profes-
sor Divanilson Campelo. I specially thank Vahideh Manshadi for her contribution to
the development of the parallel-processing simulation technique.
I thank Pat Burke for his countless help with the system administration of the
group computers as well as the supercomputing system “multipath”. I also thank
Timothy Chevalier and Mike Chevalier as they helped me to set up “multipath” for
running parallel programs and provided resources for me to learn how to write parallel
programs. I thank David Nguyen and Tung Nguyen for their technical support for
maintaining “multipath” over the years. I also thank other users of “multipath” for
their help with maintaining the system: Amit Vyas, Mukesh Hira and Sangwook Ha.
My life at Stanford would not have been as enjoyable and memorable without these
people. I wish to thank my friends Moon-Jung Kim and Su-Jeong Ok for their selfless
love and unchanging support for me throughout my years at Stanford. I also thank all
of the Korean Christian Fellowship (KCF) members. I specially thank Pastor Don,
Maria SMN, Jeon JSN, Kwon GSN, Misung Han, Jungwoo Lee, Meeyoung Park,
Hyun Jin Kim, and Min-Sung Kim. I also thank Postechians and special thanks go
to Daeho Lee, Hyejean Suh, Wonjae Lee, Keonwook Kang, and Jieun Rim.
Finally, I thank my friends and family members back in Korea. I thank my friends
Sun-Ae Kim and Seong-Ok Lee for their unchanging friendship. I also thank my
vii

sister Hyun-Jung Lee and my brother Chang-Ho Lee for their unconditional support
and love. I am indescribably indebted to my parents for their love and sacrifices
throughout my entire life. I dedicate this dissertation to them.
viii

Contents
Abstract iv
Acknowledgment vi
1 Introduction 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Simulated Network 7
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Network Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 MAC Framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4 Radio Propagation Environment and Simulation Models . . . . . . . 11
2.4.1 Radio Propagation Environment . . . . . . . . . . . . . . . . . 11
2.4.2 Radio Propagation Models for Large-Scale Radio Propagation 13
2.4.3 Toroidal Universe and SINR Calculation . . . . . . . . . . . . 21
2.5 PHY Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.6 Traffic Scenario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.7 WMN Simulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.7.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.7.2 Simulation Routine . . . . . . . . . . . . . . . . . . . . . . . . 27
2.8 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
ix

3 Control Time Slot Assignment Protocol 29
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.2 Protocol Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2.1 Basic Mechanisms . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2.2 Notation and Terminology . . . . . . . . . . . . . . . . . . . . 33
3.3 Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.1 tBUSY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.2 rBUSY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.3 tBUSY/RTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.3.4 NACK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.4 Time Slot Selection Strategy . . . . . . . . . . . . . . . . . . . . . . . 38
3.5 Parameter Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.5.1 PTH NBR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.5.2 SINRTH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.5.3 PTH T . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.5.4 PTH R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.6 Hidden Node Problem Revisited . . . . . . . . . . . . . . . . . . . . . 42
3.7 Power Control of Receive Busy Tones . . . . . . . . . . . . . . . . . . 44
3.8 Protocol Initialization . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.9 Deadlock Resolution . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.10 Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.10.1 Baseline Performance . . . . . . . . . . . . . . . . . . . . . . . 49
3.10.2 Effect of Shadowing . . . . . . . . . . . . . . . . . . . . . . . . 49
3.10.3 Performance of Power Control of Receive Busy Tones . . . . . 53
3.10.4 Effect of GR Topology . . . . . . . . . . . . . . . . . . . . . . 53
3.10.5 Effect of NACK Transmission Conditions . . . . . . . . . . . . 56
3.11 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4 Data Time Slot Access Control Protocol 58
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2 Resource Negotiation . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
x

4.2.1 Between EU and MR . . . . . . . . . . . . . . . . . . . . . . . 60
4.2.2 Among One-Hop Neighbor MRs . . . . . . . . . . . . . . . . . 61
4.3 Data Time Slot Selection . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.4 Queue/Session Prioritization . . . . . . . . . . . . . . . . . . . . . . . 64
4.5 Data Transmission/Retransmission . . . . . . . . . . . . . . . . . . . 64
4.6 Resource Release . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.7 Routing Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.7.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.7.2 Processing and Forwarding Announcements . . . . . . . . . . 66
4.7.3 Generating and Forwarding Replies to Announcements . . . . 66
4.7.4 Routing Metrics . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.8 Admission and Congestion Control . . . . . . . . . . . . . . . . . . . 70
4.8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.8.2 Framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.8.3 AC RO (Reception Only) . . . . . . . . . . . . . . . . . . . . 72
4.8.4 AC RF (Reception Forwarding) . . . . . . . . . . . . . . . . . 72
4.8.5 Stability Properties of AC RF . . . . . . . . . . . . . . . . . . 73
4.9 Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.9.1 Simulation Setup . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.9.2 Performance Metric . . . . . . . . . . . . . . . . . . . . . . . . 75
4.9.3 Results under AC RO . . . . . . . . . . . . . . . . . . . . . . 76
4.9.4 Results under AC RF . . . . . . . . . . . . . . . . . . . . . . . 82
4.10 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
5 Scalability 89
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.2 Scalability with Different GR Topology . . . . . . . . . . . . . . . . . 90
5.2.1 Network Throughput . . . . . . . . . . . . . . . . . . . . . . . 92
5.2.2 Per-Session Throughput . . . . . . . . . . . . . . . . . . . . . 96
5.2.3 Blocking Rate . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5.2.4 Dropping Rate . . . . . . . . . . . . . . . . . . . . . . . . . . 103
xi

5.3 Scalability with Different Routing Metrics . . . . . . . . . . . . . . . 106
5.3.1 Network Throughput . . . . . . . . . . . . . . . . . . . . . . . 107
5.3.2 Per-Session Throughput . . . . . . . . . . . . . . . . . . . . . 107
5.3.3 Blocking and Dropping Rates . . . . . . . . . . . . . . . . . . 110
5.4 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
6 Conclusions 113
6.1 Thesis Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
6.2 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
6.3 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
A Parallel Time-Driven Simulation 119
A.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
A.2 Principles of the Technique . . . . . . . . . . . . . . . . . . . . . . . . 121
A.2.1 Simulation Platform . . . . . . . . . . . . . . . . . . . . . . . 121
A.2.2 Workload Partitioning . . . . . . . . . . . . . . . . . . . . . . 121
A.2.3 Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . 125
A.2.4 Database Design . . . . . . . . . . . . . . . . . . . . . . . . . 127
A.2.5 Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
A.2.6 System Routine . . . . . . . . . . . . . . . . . . . . . . . . . . 131
A.3 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
A.3.1 Mobile Cellular Network Simulator . . . . . . . . . . . . . . . 132
A.3.2 Large Wireless Mesh Network Simulator . . . . . . . . . . . . 137
A.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Bibliography 139
xii

List of Tables
2.1 Simulation models and parameters for radio propagation . . . . . . . 21
2.2 PHY configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3 PHY transmission data rate vs. average received SINR . . . . . . . . 24
3.1 Probability for a MR to have at least 2 neighbor MRs within 400
meters under the simulated network topology and radio propagation
environment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.1 Parameter values for simulated GR topology . . . . . . . . . . . . . . 92
xiii

List of Figures
2.1 The wireless mesh network (WMN) scenario considered in this thesis:
it has 2-layered network structure consisting of mesh routers (MRs)
and end users (EUs) and serves as a large access network. A subset of
MRs are co-located with gateway routers (GRs) that are wired to the
backbone network. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2 The network frame structure: time is slotted into control and data
time slots and each time slot comprises multiple subslots. See the text
for detailed explanations of each of the subslots. . . . . . . . . . . . . 10
2.3 The network topology of the simulated network. . . . . . . . . . . . . 12
2.4 Radio signal propagation scenario when the transmitter is at an in-
tersection: the signal propagates along radial or line-of-sight (LOS)
streets and along cross streets. . . . . . . . . . . . . . . . . . . . . . . 13
2.5 Simulated received signal power (dBm) when the transmitter is at an
intersection, path-loss only, transmitter = MR: (a) along a line-of-
sight (LOS) street. Breakpoints are determined by Eqn. (2.1); (b)
along cross streets, receiver = MR. Each curve corresponds to a cross
street. Slope and corner attenuation are determined by Eqn. (2.2) and
Eqn. (2.3). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.6 Radio signal propagation scenario when the transmitter is off an inter-
section: the signal propagates along radial, cross, and parallel streets. 16
xiv

2.7 Simulated received signal power (dBm) along parallel streets when
transmitter is off an intersection, path-loss only, transmitter = MR
(in the middle of a block), receiver = MR. Each curve corresponds to a
parallel street and peaks correspond to intersections with cross streets.
Slopes and corner attenuation are determined by Eqn. (2.2) and (2.3)
with respect to virtual transmitters. . . . . . . . . . . . . . . . . . . . 18
2.8 Illustration of four shadow maps maintained for each mesh router: (a)
shows two shadow maps, map V and map H, and (b) shows two shadow
maps, map VH and map HV. . . . . . . . . . . . . . . . . . . . . . . 19
2.9 Illustration of the simulated toroidal universe with a transmitter at
the center. The red rectangle in a solid line denotes the original finite
universe, whose replicas tessellate the infinite universe. The blue rect-
angle in a dashed line denotes the universe considered in this thesis for
calculating the received interference level at the receiver. . . . . . . . 22
2.10 Overall simulation routine . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1 The network frame structure: time is slotted into control and data time
slots and each time slot comprises multiple subslots. See Section 3.3
for detailed explanation of each of the control subslots. . . . . . . . . 32
3.2 Example of conditions for transmitting NACK packets for two transmit
MRs A and B that are received at a MR with average received power
PA and PB respectively. . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3 Scatter plot of average received signal power vs. separation for a pair
of neighbor MRs, PTH NBR = -50 dBm and σS = 4 dB . . . . . . . . 41
3.4 Illustration of the condition in Eqn. (3.18) for an active link to become
degraded due to a new contending MR. . . . . . . . . . . . . . . . . . 43
3.5 (a) The number of mesh routers that acquired a specific control time
slot vs. control time slot index and (b) the distribution of SINR over
links between two neighbor mesh routers, both for different values of
αR. In all cases, we set αT = αR. . . . . . . . . . . . . . . . . . . . . 50
xv

3.6 (a) The number of mesh routers that acquired a specific control time
slot vs. control time slot index and (b) the distribution of SINR over
links between two neighbor mesh routers, both for different values of
the standard deviation of the log-normal shadowing. In all cases, we
set αT = αR = 1 dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.7 (a) The number of mesh routers that acquired a specific control time
slot vs. control time slot index and (b) the distribution of SINR over
links between two neighbor mesh routers, both for with and without
the power control of receive busy tones. In all cases, we set αT = αR
= 1 dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.8 (a) The number of mesh routers that acquired a specific control time
slot vs. control time slot index and (b) the distribution of SINR over
links between two neighbor mesh routers, both for different GR topolo-
gies. In all cases, we set αT = αR = 1 dB, and the power control of
receive busy tones is employed. . . . . . . . . . . . . . . . . . . . . . 55
4.1 The network frame structure: time is slotted into control and data
time slots and each time slot comprises multiple subslots. . . . . . . . 60
4.2 Example for illustrating the two different routing metrics. PA→B 6=PA→C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.3 Distribution of the number of hops under two different link metrics
considered in this thesis. (#MRs):(#GRs) = 40:1 . . . . . . . . . . . 70
4.4 (a) Mean network throughput vs. session arrival rate; (b) mean per-
session throughput for successfully completed sessions vs. session ar-
rival rate. Both under AC RO and (#MRs):(#GRs) = 40:1 . . . . . 77
4.5 (a) Mean PHY transmission rate of successfully received data packets
among MRs vs. session arrival rate; (b) dropping rate vs. session
arrival rate. Both under AC RO and (#MRs):(#GRs) = 40:1 . . . . 79
4.6 Mean per-session throughput for successfully completed sessions vs.
path lengths (hops) under AC RO and (#MRs):(#GRs) = 40:1 . . . 82
xvi

4.7 (a) Mean network throughput for successfully completed sessions vs.
session arrival rate; (b) mean per-session throughput for successfully
completed sessions vs. session arrival rate. Both are under (#MRs):(#GRs)
= 40:1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.8 (a) Blocking rate vs. session arrival rate; (b) dropping rate vs. session
arrival rate. Both are under (#MRs):(#GRs) = 40:1. . . . . . . . . . 86
4.9 Mean PHY transmission rate of successfully received packets among
MRs. (#MRs):(#GRs) = 40:1. . . . . . . . . . . . . . . . . . . . . . 87
5.1 The network topology of the simulated network. . . . . . . . . . . . . 90
5.2 Distribution of the number of hops along paths from MRs to their best
GRs under different scenarios of GR topology and routing metric. . . 91
5.3 Mean network throughput vs. session arrival rate under different gate-
way router topologies. In all cases, the routing metric ‘min air-time’ is
used. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
5.4 Mean PHY transmission rate of successfully received data packets
among MRs under different gateway router topologies. In all cases,
the routing metric ‘min air-time’ is used. . . . . . . . . . . . . . . . . 94
5.5 Mean aggregate number of data time slots used for reception at MRs
across the network under different gateway router topologies. In all
cases, the routing metric ‘min air-time’ is used. . . . . . . . . . . . . 95
5.6 Mean per-session throughput for successfully completed sessions vs.
session arrival rate under different gateway router topologies. In all
cases, the routing metric ‘min air-time’ is used. . . . . . . . . . . . . 97
5.7 (a) Mean per-session throughput for successfully completed sessions
vs. path lengths (hops) under (#MRs):(#GRs) = 40:1; (b) mean per-
session throughput for successfully completed sessions vs. path lengths
(hops) under (#MRs):(#GRs) = 10:1. In both cases, AC RF and the
routing metric ‘min air-time’ are considered. . . . . . . . . . . . . . . 98
5.8 Blocking rate vs. session arrival rate under different gateway router
topologies. In all cases, the routing metric ‘min air-time’ is used. . . . 100
xvii

5.9 (a) Blocking rate at MRs as a function of path lengths from MRs to
best GRs under (#MRs):(#GRs) = 40:1; (b) blocking rate at MRs as a
function of path lengths from MRs to best GRs under (#MRs):(#GRs)
= 10:1. In both cases, AC RF and the routing metric ‘min air-time’
are considered. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5.10 Dropping rate vs. session arrival rate under different gateway router
topologies. In all cases, the routing metric ‘min air-time’ are considered.104
5.11 (a) Dropping rate at MRs as a function of path lengths from MRs to
best GRs under (#MRs):(#GRs) = 40:1; (b) dropping rate at MRs as a
function of path lengths from MRs to best GRs under (#MRs):(#GRs)
= 10:1. In both cases, AC RF and the routing metric ‘min air-time’
are considered. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.12 Mean network throughput vs. session arrival rate under the two dif-
ferent routing metrics considered and AC RF. . . . . . . . . . . . . . 108
5.13 Mean PHY transmission rate of successfully received data packets
among MRs under the two different routing metrics considered and
AC RF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.14 Mean per-session throughput for successfully completed sessions vs.
session arrival rate under the two different routing metrics considered
and AC RF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
5.15 (a) Blocking rate vs. session arrival rate; (b) dropping rate vs. session
arrival rate under the two different routing metrics considered and
AC RF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
A.1 Our supercomputing platform . . . . . . . . . . . . . . . . . . . . . . 122
A.2 Primary communication pattern among processors in one simulation
time step: (a) geography-based; (b) channel-based workload partition-
ing. Pi denotes a processor. . . . . . . . . . . . . . . . . . . . . . . . 123
A.3 Database structure and operations executed in one simulation time step
for an example of two processors. A computation phase is followed by
a communication phase. . . . . . . . . . . . . . . . . . . . . . . . . . 128
xviii

A.4 Performance of the parallel simulation technique for a mobile cellular
network simulator and a WMN simulator: (a) runtime vs. number of
processors; (b) speedup gain vs. number of processors. . . . . . . . . 133
A.5 Grade of service (GOS) vs. number of processors of a mobile cellular
network. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
A.6 Grade of service (GOS) vs. offered traffic (Erlang/cell) for the simu-
lated mobile cellular network with and without extrapolation for 128
channels, along with Erlang-B system. . . . . . . . . . . . . . . . . . 136
xix

Chapter 1
Introduction
1.1 Motivation
Multi-hop wireless communications networks have been of increasing interest over the
past decade. Two main types of such networks have emerged: mobile ad-hoc networks
(MANETs) and wireless mesh networks (WMNs). MANETs are infrastructure-less,
non-hierarchical wireless networks where all network entities can move and function
as routers and discover and maintain routes to other entities in the network. On
the other hand, WMNs typically have a hierarchical structure and are supported by
an infrastructure. Furthermore, the functionalities of the network entities may vary
significantly across the layers of the hierarchical network structure. While MANETs
have been historically envisioned to serve very specialized applications, such as bat-
tlefields and emergency situations, WMNs have inspired numerous general applica-
tions ranging from broadband home networking to community networks to high-speed
metropolitan area networks (MANs) [1–3]. Particularly, large-scale WMNs with in-
frastructure support have been considered as an affordable and scalable solution to
provide broadband packet data communications across wide geographic areas, thanks
to their inherent advantages such as robustness to node failures, ease of deployment
and maintenance, and low initial deployment cost [1–3].
The architecture of WMNs, i.e., the structure of the hierarchy and the assumptions
on the functionalities of the network entities, is mainly determined by the target
1

CHAPTER 1. INTRODUCTION 2
application scenario [1]. In this thesis, we consider large-scale WMNs that serve as
wireless access networks over large geographic areas. Such an application scenario
of WMNs often has been proposed to have a layered network structure. Examples
include the public Wi-Fi mesh network deployed by Google, Inc. [4] in the downtown
area of Mountain View, CA and the proposed city-wide public wireless access network
in San Francisco, CA submitted jointly by Google, Inc. and Tropos Networks, Inc [5].
Such a layered network structure typically contains end-users at the lowest layer,
wireless mesh routers in the middle layer, and other aggregation nodes at the top
layer. The aggregation nodes of the highest layer may include another set of wireless
entities that communicate wirelessly with the wireless mesh routers of the middle
layer, or may be entirely wired through e.g., optical or DSL networks. In this thesis,
we focus on the two lowest layers that consist of end-users and wireless mesh routers.
A set of wireless mesh routers are assumed to be co-located with wired network
entities called gateway routers.
Substantial research on WMNs has been conducted and several protocols have
been proposed by various standardization bodies [3]. Particularly, routing for multi-
hop wireless communications networks has been extensively studied in the context
of MANETs [6–9] and more recently for WMNs [10–12]. These studies commonly
assume given protocol stacks for medium access control (MAC) and physical (PHY)
layer of network functions such as those of the IEEE 802.11 standards [13].
Compared to routing, research on MAC for WMNs has been relatively sparse.
The majority of the studies on MAC for WMNs consider contention-based schemes
such as the IEEE 802.11 MAC protocol that is based on the carrier sense multiple
access (CSMA) with collision avoidance (CA) principle. CSMA/CA-based schemes
initiate the assessment of the availability of the medium or resources for transferring
data packets mainly by sensing or measuring the power level of the medium directly.
On the other hand, another type of MAC schemes [14–16] has been proposed. These
schemes allocate separate resources for control and data packets, and the availability
of resources for transferring data packets is assessed through exchanging control pack-
ets using control resources. Data resources are then reserved through these control
packets.

CHAPTER 1. INTRODUCTION 3
The former type of MAC schemes based on the CSMA/CA principle inherently
has less control overhead compared to the latter type of MAC schemes and thus may
lead to higher network throughput when the traffic load is light. However, as the
traffic load increases and increasingly more nodes need to acquire the medium simul-
taneously, it may become possible to coordinate data packet transmissions among
nodes more efficiently when resources are divided for control and data packets and
the availability or usage of data resources can be known and controlled by exchanging
control packets. In this thesis, we focus on the latter type of MAC schemes. Com-
paring the two different types of MAC schemes for the type of WMNs considered in
this thesis (i.e., access networks deployed over large geographic areas) is beyond the
scope of this thesis and is listed as a possible future research direction in Chapter 6.
Due to their prohibitive complexity of analysis and simulations, most of the studies
on WMNs for large-scale applications have often oversimplified the underlying physi-
cal and/or networking models and do not represent many of the issues and vagaries of
the radio propagation, interference, random traffic arrivals, queueing and admission
control encountered in real networks. As a result, protocols and algorithms tailored
to these idealized environments do not perform as well as predicted in real wireless
networks.
In this thesis, based on more realistic physical and networking models, we eval-
uate the performance of large-scale WMNs that serve as access networks over large
geographic areas. We create a new set of MAC protocols for the WMNs incorpo-
rating such models. We also develop a large WMN simulator that implements the
protocols and includes measurements-based models for radio propagation and inter-
ference calculation for a large built-in urban area. The simulator also captures the
stochastic network behavior resulting from random traffic arrivals, admission control,
and queueing. The enormous size and computational complexity of the simulator
is addressed using a parallel-processing simulation technique that utilizes multiple
processors interconnected with high-speed links and associated with large high-speed
memory. Through extensive simulations incorporating such details, we determine the
performance of the WMNs. Primary factors are identified across the PHY, MAC

CHAPTER 1. INTRODUCTION 4
and routing layers of network functions that affect the performance and their intri-
cate interactions are examined to explain the behavior of fundamental performance
metrics including the network throughput, per-session throughput, and blocking and
dropping rates.
1.2 Thesis Outline
This thesis is organized as follows. Chapter 2 describes the WMN studied in this
thesis. The network architecture and the envisioned application scenario are first
described. Then the MAC framework is described and the overall network operations
are explained within the framework. The MAC framework is based on time division
multiple access (TDMA) and time division duplex (TDD) and utilizes two types
of time slots: control and data. Then the WMN simulator created for this thesis
research is described: the radio propagation environment and its simulation models
and methodology are first described; then PHY considerations and the user traffic
model and parameters are presented; and finally the overall simulation routine is
illustrated.
In Chapter 3, we design a protocol through which every wireless mesh router in
the WMN acquires a broadcast time slot that supports a minimum average received
signal-to-interference-plus-noise ratio (SINR) from the mesh router to all of its neigh-
bor mesh routers. The acquired broadcast time slot is used for exchanging control
packets among one-hop neighbor mesh routers and between mesh routers and their
associated end-users. The chapter first explains the basic mechanisms of the protocol
and illustrates the full operations. Selection criteria of the protocol parameters are
then given. Furthermore, a power control scheme is introduced that allows better uti-
lization of resources for maintaining control time slots. Other design considerations
of the protocol including protocol initialization and deadlock resolution are discussed.
Extensive simulation results are presented and discussed. First of all, the protocol is
shown to support the target minimum average received SINR over all neighbor pairs
of mesh routers in all simulated scenarios. In addition, the protocol sensitivities to
the amount of shadowing of the radio propagation and to the topology of gateway

CHAPTER 1. INTRODUCTION 5
routers are determined. The benefit of the power control scheme is also demonstrated.
In Chapter 4, we develop a protocol that controls the medium access over data
time slots. The protocol utilizes control time slots that are assigned among mesh
routers through the control time slot assignment protocol developed in Chapter 3.
The protocol provides mechanisms for networks entities (mesh routers and end-users)
to negotiate and allocate resources in a fully cooperative and distributed manner.
Furthermore, the protocol supports adaptive resource allocation through dynamic
allocation of data time slots and PHY transmission modes over the slots as well as
through user prioritization. As part of the data time slot access control protocol, we
introduce a new admission and congestion control (ACC) policy that incorporates
the resource availability at the intermediate routers along the path to the destination
router, and yet utilizes only local information available at the admitting router and
has a minimal increase in control overhead.
The chapter first illustrates the resource negotiation mechanisms provided by the
protocol. Key elements of the protocol for dynamic and effective resource allocation
are then discussed including data time slot selection, queue/session prioritization,
data transmission/retransmission, and resource release. The routing protocol em-
ployed by the WMN is then described including its operations and routing metrics.
Two ACC policies (denoted as AC RO and AC RF) are then presented and their
stability properties are analyzed. Finally, extensive simulation results are presented
and discussed. Several fundamental performance metrics are examined including the
network throughput, per-session throughput and blocking and dropping rates. The
impact of the two ACC schemes on the network performance are compared and dis-
cussed. The ACC scheme AC RF is shown to stabilize the network under heavy traffic
loads unlike the policy AC RO.
In Chapter 5, we investigate the performance of the WMN with focus on the
scalability under different scenarios of network topology and routing metric. Specifi-
cally, while keeping the total number of mesh routers constant, we vary the number
and locations of gateway routers deployed in the network and also consider two dif-
ferent routing metrics. We examine the scalability behavior of several fundamental
performance metrics including the network throughput, per-session throughput, and

CHAPTER 1. INTRODUCTION 6
blocking and dropping rates, and identify major factors that affect the scalability
behavior under the simulated scenarios. We show that the PHY, MAC and routing
layers of network functions interact intricately with one another to determine the net-
work performance. Specifically, we demonstrate that different mesh sizes (i.e., number
of mesh routers served by one gateway router) and different routing paths affect the
tolerable interference level across the network and that they consequently determine
the usage of radio resources, i.e, supportable PHY transmission rates and data time
slots, across the network. Particularly, we show that with more deployed gateway
routers, i.e., more backbone support to the network, the network throughput and
per-session throughput improve significantly, and we explain the improvement based
on the aforementioned interactions across the layers of network functions. The overall
network performance is shown for two different routing metrics.
Chapter 6 summarizes the thesis along with a list of major contributions and
concludes with possible future research directions.
Finally, Appendix A presents a parallel processing technique for time-driven sim-
ulation of large and complex wireless networks with substantial PHY details such as
radio propagation and interference. We identify and demonstrate the issues of the
technique related to the time-driven nature of the simulation and propose schemes for
effective and efficient parallelization over a supercomputing platform which comprises
multiple processors with large high-speed memory and interconnected with high-speed
links. We apply the technique to two different wireless network simulators, a mobile
cellular network simulator and a large WMN simulator, and demonstrate significant
runtime speedup gains for both simulators.

Chapter 2
Simulated Network
2.1 Introduction
In this chapter, we describe the WMN studied in this thesis. We first describe the
network architecture and its envisioned application scenario. We then detail the MAC
framework that is based on TDMA and TDD, and illustrate the overall network
operations within the framework. We then describe the WMN simulator created
for this thesis research: we first explain the radio propagation environment and its
simulation models and methodology; then present PHY considerations and user traffic
statistics; and finally illustrate the overall simulation routine.
2.2 Network Architecture
As explained in Chapter 1, WMNs have a broad spectrum of application scenarios. In
this thesis, as a target application scenario, we consider wireless mesh access networks
deployed over wide geographic areas that provide broadband packet data communi-
cations to users. To support such an application scenario, we consider a layered
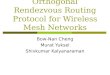
network structure shown in Fig. 2.1: one layer of the network structure comprises
wireless mesh routers (MRs), and the lowest layer of the network structure consists
of end users (EUs). A subset of MRs are co-located with gateway routers (GRs) that
are wired to the backbone network. MRs form a wireless mesh and relay user data to
7

CHAPTER 2. SIMULATED NETWORK 8
Figure 2.1: The wireless mesh network (WMN) scenario considered in this thesis:it has 2-layered network structure consisting of mesh routers (MRs) and end users(EUs) and serves as a large access network. A subset of MRs are co-located withgateway routers (GRs) that are wired to the backbone network.
the backbone network through GRs. EUs communicate only with the MRs and not
directly with one another.
2.3 MAC Framework
We consider a MAC framework that supports explicit cooperation among MRs for
resource reservation for data transmission. We consider a TDMA and TDD-based
framework. Although one can extend the MAC framework to employ multiple fre-
quency channels, we assume a single frequency channel in this thesis. MRs and EUs
share the same frequency channel. Fig. 2.2 shows the frame structure of the network.

CHAPTER 2. SIMULATED NETWORK 9
Time is divided into time slots and there are two types of time slots: one for control
and the other for data. In our TDMA, a MR uses different data time slots for serving
different EUs. However, each data time slot is reused across the network. In TDD, a
MR or an EU cannot transmit and receive simultaneously.
Control time slots provide a random access channel for EUs so that EUs can
discover the network and request admission to the network. Control time slots also
provide a means for MRs to exchange control messages among themselves for such
operations as network discovery, routing table construction, and resource negotiation.
Each MR is associated with one control time slot. In Chapter 3, we develop a protocol
that assigns a control time slot to each of the MRs in the WMN. Through the protocol,
each MR acquires a broadcast control time slot that supports a minimum average
received SINR from the MR to all of its neighbor links. Here, a MR A is defined to
be a neighbor of another MR B if and only if the averaged received signal power at
A from B, PB→A, is at least as high as a threshold, PTH NBR. In other words, the
control time slot assignment protocol guarantees a target average received SINR for
a transmit MR to any other receive MR at which the average received signal power is
at least PTH NBR. Once MRs acquire control time slots, they continuously transmit
on their assigned control time slots afterwards. Time slots for MRs are synchronized
across the network as discussed in Section 3.8.
Each control time slot is partitioned into five subslots: the first control subslot
(tBUSY in Fig. 2.2) is where a MR broadcasts beacon signals and exchanges con-
trol messages with its neighbor MRs. The control time slot assignment protocols
guarantees the target minimum average received SINR over this subslot. The next
three control subslots (i.e., rBUSY, tBUSY/RTS, and NACK in Fig. 2.2) are used
for running the control time slot assignment protocol. The last control subslot (RA)
serves as a random access channel for EUs.
User data packets are transmitted on the first data subslot (DATA TX in Fig. 2.2),
and acknowledgment (ACK) packets on the second data subslot (DATA ACK in
Fig. 2.2). In Chapter 4, we create a protocol for controlling access over data time
slots. Operating in a fully cooperative and distributed manner, the protocol provides
two types of negotiation mechanism among network entities. One is between an

CHAPTER 2. SIMULATED NETWORK 10
tBUSY rBUSY tBUSY/RTS NACK RA
CTRL SLOTDATA SLOT
... ... ...FRAME 0 FRAME 1
DATA_TXDATA_ACK
Figure 2.2: The network frame structure: time is slotted into control and data timeslots and each time slot comprises multiple subslots. See the text for detailed expla-nations of each of the subslots.
EU and its associated MR, and the other is among one-hop neighbor MRs. These
negotiations are performed over control time slots. The negotiation between an EU
and a MR is performed during the control time slot of the MR, and the negotiation
among one-hop neighbor MRs is done over the control time slots of the involved MRs.
Within this framework, the overall operation of the network is as follows. When
the network is deployed, it enters the pre-operation phase during which the network
runs the control time slot assignment protocol in Chapter 3. Once control time slots
are assigned to MRs, the network starts to run the routing protocol described in
Section 4.7 to construct routing tables at MRs. Once the network is set up, it enters
the normal operation phase during which it executes the data time slot access control
protocol in Chapter 4 to serve EUs. The network needs to re-run the control time slot
assignment protocol if a new MR is added to the network. In addition, routing tables
need to be re-constructed if a MR fails or a new MR is added to the network. The
network could perform such re-configuration of control time slots or routing tables
proactively by entering the pre-operation phase periodically.

CHAPTER 2. SIMULATED NETWORK 11
2.4 Radio Propagation Environment and Simula-
tion Models
The propagation of radio signals highly depends on the environment, and/or sys-
tem parameters such as channel bandwidth and operating frequency, and/or antenna
configurations at both transmitter and receiver. There are mainly three components
in characterizing and modeling the propagation of radio signals: distance-dependent
path-loss, large-scale fading or shadowing, and small-scale fading or multipath fad-
ing. The distance-dependent path-loss describes the trend of the average received
signal power as a function of the distance between the transmitter and the receiver.
Large-scale fading or shadowing characterizes the fluctuation of the local received sig-
nal power averaged over several wavelengths. These two components jointly describe
the large-scale variation of the average received signal strength. Small-scale fading or
multipath fading, on the other hand, refers to the fluctuation around the local average
received signal strength on the order of a wavelength and results from the replicas of
the transmitted signal that add up at the receiver with random phase shifts. In this
section, we describe the radio propagation environment and its simulation models
considered in this thesis.
2.4.1 Radio Propagation Environment
As illustrated in Fig. 2.3, we consider heavily built-in urban areas where a square grid
of continuous multi-story buildings and streets is laid across a region. For heavily
built-in urban areas, there have been extensive efforts in measuring, characterizing,
and modeling radio propagation. Among them are [17–20]. Major characteristics of
the radio propagation in this type of environment are disparate propagation behavior
along streets of different orientation with respect to the transmitter, e.g., line-of-sight
(LOS) or radial streets, and non line-of-sight (NLOS) streets such as cross streets or
parallel streets; and a significant corner attenuation around a corner at an intersection.
MRs are placed at street corners on a square grid and assumed to be 5 m high.
The separation distance between adjacent mesh routers is one of the key parameters

CHAPTER 2. SIMULATED NETWORK 12
Figure 2.3: The network topology of the simulated network.
of the network topology, and is determined based on various factors across the layers
of network functions, e.g., a required SINR for a target error performance under
the employed PHY configurations and MAC framework. Under the adopted PHY
configurations described in Section 2.5 and MAC framework in Section 2.3, we choose
100 m for the grid spacing of MRs so that adjacent MRs can support the highest PHY
transmission rate (i.e., 54 Mbps requiring 30 dB SINR in Table 2.3) under light or
moderate co-channel interference in the network.

CHAPTER 2. SIMULATED NETWORK 13
corner attenuation
transmitter
radial street
cross street
Figure 2.4: Radio signal propagation scenario when the transmitter is at an intersec-tion: the signal propagates along radial or line-of-sight (LOS) streets and along crossstreets.
2.4.2 Radio Propagation Models for Large-Scale Radio Prop-
agation
The simulation models and parameters for the large-scale variation of the radio prop-
agation in this thesis are adopted largely from [17, 19] that considered very similar
environments. Reference [17] developed urban propagation models based on exten-
sive measurements conducted in San Francisco while reference [19] proposed models
based on measurements made in central Stockholm. On the other hand, the small-
scale fading of the radio propagation is not directly simulated in this thesis. Rather,
performance degradation due to the small-scale fading is implicitly incorporated into
the simulator by taking the error performance of the underlying PHY interface ob-
tained in the corresponding fading environment through separate simulations (see
Section 2.5). Table 2.1 summarizes the simulation models and parameters for radio
propagation. Entries in the table are described in the following sections.

CHAPTER 2. SIMULATED NETWORK 14
Distance-Dependent Path-Loss: When Transmitter is At Intersection
We first consider the case in which the transmitter is located at an intersection.
Fig. 2.4 illustrates the radio propagation scenario when the transmitter is at an inter-
section. Streets are categorized into two types: radial or line-of-sight (LOS) streets,
and cross streets. For radial or LOS streets, a well-known dual-slope or two-ray
exponential model is adopted, also consistent with observations made in [17–19]:
d−n, n =
2, d ≤ df
4, d > df(2.1)
where the breakpoint, df = 4hthr/λ, explicitly takes into account antenna heights
(ht, hr) and the wavelength (λ) at the operating frequency. For example, at 2.4 GHz,
we have df = 240 m for ht = 5 m, hr = 1.5 m and df = 800 m for ht = 5 m and hr =
5 m. Fig. 2.5-(a) shows the received signal power along a LOS street employing the
simulation parameters in Table 2.1.
Along cross streets, a single-slope exponential model is used as seen in Fig. 2.5-(b).
Each curve in Fig. 2.5-(b) shows the received signal power (with path-loss only) along
a cross street designated by a dashed arrow in Fig. 2.4. For example, the uppermost
curve in Fig. 2.5-(b) corresponds to one of the cross streets one block away from the
transmitter in Fig. 2.4. The next uppermost curve in Fig. 2.5-(b) corresponds to one
of the cross streets two blocks away from the transmitter in Fig. 2.4, and so on.
A reference path-loss value for each cross street is calculated at the middle point
of the intersection that the cross street makes with a radial street, and the path-loss
exponent, n, is found as a function of the perpendicular distance, dperp, of the cross
street to the transmitter, as suggested in [17]:
d−n, n = 0.029 (dperp − 60) + 2.5 (2.2)
Here, the distance d is measured from the transmitter to the receiver.
Moreover, when turning around a corner from a radial street to a cross street,
we introduce an attenuation in the average received signal power. In this thesis, the
corner attenuation, offsetcorner, is determined as a function of the perpendicular

CHAPTER 2. SIMULATED NETWORK 15
100
101
102
103
104
−100
−90
−80
−70
−60
−50
−40
−30
−20
−10
DISTANCE (m)
RE
CE
IVE
D S
IGN
AL
PO
WE
R (
dBm
)
ALONG LINE−OF−SIGHT STREET WHEN TRANSMITTER IS AT INTERSECTION
receiver = mesh routerreceiver = end user
(a)
102
103
−140
−130
−120
−110
−100
−90
−80
−70
−60
−50
−40
DISTANCE (m)
RE
CE
IVE
D S
IGN
AL
PO
WE
R (
dBm
)
ALONG CROSS STREET WHEN TRANSMITTER IS AT INTERSECTION
(b)
Figure 2.5: Simulated received signal power (dBm) when the transmitter is at anintersection, path-loss only, transmitter = MR: (a) along a line-of-sight (LOS) street.Breakpoints are determined by Eqn. (2.1); (b) along cross streets, receiver = MR.Each curve corresponds to a cross street. Slope and corner attenuation are determinedby Eqn. (2.2) and Eqn. (2.3).

CHAPTER 2. SIMULATED NETWORK 16
actual transmitter
radial street
cross street
virtual transmitter
parallel street
corner attenuation
Figure 2.6: Radio signal propagation scenario when the transmitter is off an intersec-tion: the signal propagates along radial, cross, and parallel streets.
distance, dperp, of the cross street to the transmitter, as suggested in [17]:
offsetcorner(dB) = 0.06 (dperp − 60) + 5 (2.3)
Given these propagation models along a cross street, when we calculate the re-
ceived signal power at an intersection where two cross streets meet, we add the power
components from the two cross streets. As a result, a boost is observed at those
intersections along a cross street as shown in Fig. 2.5-(b).
Distance-Dependent Path-Loss: When Transmitter is Off Intersection
Fig. 2.6 illustrates the radio propagation scenario in which the transmitter is located
off an intersection. Streets are divided into three groups: radial or LOS street, cross
streets, and parallel streets. Here, parallel streets refer to those streets that are
parallel to the LOS street. The first two groups, i.e., radial and cross streets, are
modeled in the same way as in the case in which the transmitter is at an intersection.
For parallel streets, on the other hand, we consider the two cross streets that are
closest to the transmitter and assume that virtual transmitters are placed at the two

CHAPTER 2. SIMULATED NETWORK 17
intersections which these two closest cross streets make with the radial street, as
indicated by the dashed circles in Fig. 2.6. With respect to the virtual transmitters
at these intersections, the two closest cross streets can be seen as radial streets and
parallel streets can be seen as cross streets. Then, from each virtual transmitter, we
calculate the path-loss along parallel streets in the same way as with cross streets in
the case in which the transmitter is at an intersection. We combine the two path-loss
values derived from the two virtual transmitters to obtain the composite path-loss
values along parallel streets. Fig. 2.7 shows an example of the received signal power
along parallel streets employing the simulation parameters in Table 2.1. Each curve
in Fig. 2.7 shows the received signal power (with path-loss only) along a parallel
street designated by a dashed-dotted arrow in Fig. 2.6. For example, the uppermost
curve in Fig. 2.7 corresponds to one of the parallel streets one block away from the
transmitter in Fig. 2.6. The second uppermost curve in Fig. 2.7 corresponds to one
of the parallel streets two blocks away from the transmitter in Fig. 2.6, and so on.
Distance-Dependent Path-Loss: Reciprocity Consideration
When the transmitter and receiver are stationary and the environment does not
change, the average received signal power at the receiver is the same as the one
when the transmitter and receiver exchange their roles, i.e., when the previous re-
ceiver now transmits and the previous transmitter now receives. Here we assume the
same system configuration for the transmitter and receiver. While the propagation
model for distance-dependent path-loss along LOS streets given in Eqn. (2.1) guar-
antees this reciprocity, the propagation models for cross streets and parallel streets
described above do not guarantee the reciprocity. In this thesis, the reciprocity of
distance-dependent path-loss is guaranteed as follows: we first calculate the path-loss
component for each of the scenarios A → B and B → A for a transmit node A and
a receive node B according to the models explained above, and then take the (linear
power) average of the two.

CHAPTER 2. SIMULATED NETWORK 18
1500 2000 2500 3000 3500−120
−110
−100
−90
−80
−70
−60
−50
−40
POSITION ALONG STREET (m)
RE
CE
IVE
D S
IGN
AL
PO
WE
R (
dBm
)
ALONG PARALLEL STREET WHEN TRANSMITTER IS OFF INTERSECTION
transmitter
intersection
Figure 2.7: Simulated received signal power (dBm) along parallel streets when trans-mitter is off an intersection, path-loss only, transmitter = MR (in the middle of ablock), receiver = MR. Each curve corresponds to a parallel street and peaks corre-spond to intersections with cross streets. Slopes and corner attenuation are deter-mined by Eqn. (2.2) and (2.3) with respect to virtual transmitters.
Large-Scale Fading or Shadowing
The fluctuation of the large-scale variation around the distance-dependent path-loss
is well modeled as a zero-mean lognormal random process [17–23]. Both [17, 19]
report 3 to 4 dB of standard deviation for both LOS and NLOS streets. In both
works, the standard deviation did not seem to vary much along different streets.
Thus in this thesis, we take a constant value of 4 dB for the standard deviation of
the lognormal shadow random process along every street. For an autocorrelation
model, we adopt a commonly used first-order autoregressive model proposed in [24],
and the parameter values are inferred from [17,19]; the correlation distance where the
normalized autocorrelation value becomes e−1 is taken to be 10 m which corresponds
to roughly 30λ in [17, 19].

CHAPTER 2. SIMULATED NETWORK 19
... ...
...
...
map_H
map_V
mesh router street
(a)
......
... ...
map_VH
map_HV
mesh router street
(b)
Figure 2.8: Illustration of four shadow maps maintained for each mesh router: (a)shows two shadow maps, map V and map H, and (b) shows two shadow maps,map VH and map HV.

CHAPTER 2. SIMULATED NETWORK 20
For each MR, we maintain four types of shadow maps. Each shadow map con-
tains shadow samples generated at every 50 m according to the model and parameters
described above. The maps are generated during the initialization phase of the sim-
ulation as explained in Section 2.7.2, and once generated, the shadow samples of the
maps remain fixed throughout each simulation. Shadow samples in different maps
are generated independently. Fig. 2.8 illustrates the four maps maintained for each
MR: map V, map H, map VH, and map HV. map V contains 2×Nstr intf +1 vertical
streets with the MR at the center of the map. The number of these vertical streets
in map V is chosen such that the received signal from the MR along a vertical street
beyond these streets is insignificant. We take Nstr intf = 5, i.e., we consider up to
5 parallel streets from the transmitter for calculating co-channel interference. This
is based on the observation that the received signal power beyond the five closest
cross streets or parallel streets from the transmitter are insignificant compared to the
receiver thermal noise power level of -98 dBm as seen in Fig. 2.5-(b) and Fig. 2.7,
respectively. Similarly, map H contains 2 × Nstr intf + 1 horizontal streets with the
MR at the center of the map. In addition, map VH contains shadow samples along
horizontal streets that overlap with those vertical streets contained in map V, and
map HV includes vertical streets that overlap with the horizontal streets of map H.
Shadow samples for locations that are contained in more than one shadow map of the
same MR are set to be the same with one another.
The shadow samples, which are generated and stored in the shadow maps, are
then referred to when a shadow sample is generated for a location for which a shadow
sample is not generated and stored in a shadow map. In this thesis, we linearly
interpolate the two closest shadow samples stored in the shadow maps.
Large-Scale Fading or Shadowing: Reciprocity Consideration
The reciprocity of the shadowing component for a pair of MRs, e.g., MR A and MR B,
is guaranteed as follows in this thesis. Consider a shadow map generated for MR A.
Let sA→B denote the shadow sample in that shadow map of MR A that is generated
at the location where MR B is placed. Similarly, let sB→A denote the shadow sample
in a shadow map of MR B that is generated at the location where MR A is placed.

CHAPTER 2. SIMULATED NETWORK 21
Table 2.1: Simulation models and parameters for radio propagation
Carrier Frequency 2.4 GHz
LOS d−n, n =
2 for d ≤ df
4 for d > df
Path-loss df = 4hthr/λ
NLOS d−n, n = 0.029× (dperp − 60) + 2.5
Corner offset (dB) = 0.06× (dperp − 60) + 5
ShadowingLognormal (σS = 4 dB)
Exponential autocorrelation (dρ= 10 m)
Topology Mesh routers on a square grid, grid side = 100 m
Universe Toroidal universe, 12 km × 12 km
Then, we set sA→B = sB→A. On the other hand, when calculating the shadowing
component for a link between an EU and a MR, we take the shadow value calculated
at the location of the EU in the shadow maps of the MR.
2.4.3 Toroidal Universe and SINR Calculation
As in [25, 26], we simulate a universe wrapped around like a toroid. In a toroidal
universe, network entities of the same type experience a similar level of interference
across the universe for uniform traffic patterns, and thus there is no “edge effect”
and data can be collected from all entities in the simulated universe. In a toroidal
universe, a radio signal propagating out of the universe reappears at the opposite
edge and continues to propagate in the same direction.
Fig. 2.9 illustrates the simulated toroidal universe. The solid-lined square denotes
the original finite universe. Consider a transmitter at the center of the original uni-
verse (the circle within the solid-lined square in Fig. 2.9) and a receiver (the cross
within the solid-lined square in Fig. 2.9) and one interferer (the triangle within the
solid-lined square in Fig. 2.9). When calculating the received signal power at the
receiver, it is calculated as if the universe is finite (i.e., we consider the solid-lined
square only). On the other hand, when calculating the received interference power

CHAPTER 2. SIMULATED NETWORK 22
transmitter receiver interferer
Figure 2.9: Illustration of the simulated toroidal universe with a transmitter at thecenter. The red rectangle in a solid line denotes the original finite universe, whosereplicas tessellate the infinite universe. The blue rectangle in a dashed line denotesthe universe considered in this thesis for calculating the received interference level atthe receiver.
at the receiver, we consider active network entities transmitting not only in the orig-
inal universe but also in all the replicated universes. That is, we include not only
the original interference in the original universe (the triangle within the solid-lined
square in Fig. 2.9) but also from all the replicas of the transmitter (the circles within
the dashed-lined squares in Fig. 2.9) and those of the interferer (the triangles within
the dashed-lined squares in Fig. 2.9).
The size of the original universe is determined by several factors including prop-
agation conditions (e.g., path-loss exponents), the extent of resource reuse, and the
number of replicas of each network entity considered for calculating interference. The

CHAPTER 2. SIMULATED NETWORK 23
larger the path-loss exponents, the smaller the resource reuse factors (i.e., a resource
is reused more often), and the larger the number of replicas of each network entity
considered for calculating interference, the smaller the universe size can be [26].
In this thesis, when we calculate the received interference level at a receive node
from all active transmitting nodes, each of the active transmitting nodes in the original
universe is taken into account only once: among the original transmitting node in
the original universe and its replicas in the replicated universe, we include only the
interference from the closest node to the receive node . For example, for the receiver
in Fig. 2.9 (the cross within the solid-lined square), we consider the closest replica (the
triangle within the dashed-lined square around the receiver) of the original interferer.
With this criterion of interference calculation in the toroidal universe, it is critical
to have the original universe size large enough so that all significant interferers in
the toroidal universe are taken into account. This can be ensured when the received
signal power along the edges of the original universe from a transmitter at the center
of the universe becomes negligible or comparable to the receiver thermal noise floor.
For example, the universe size needs to be large enough such that any interference
coming from outside of the dashed-lined square around the receiver in Fig. 2.9 becomes
negligible at the receiver (the cross within the solid-lined square). For the noise floor
of -98 dBm in Table 2.2 and the propagation environment and models in Table 2.1, a
distance of about 10 km is found sufficient for the side length of the original square
universe.
Another factor that affects the universe size is the network topology. To ensure the
continuation of the topology of GRs after wrapping around the universe, the universe
dimension (i.e., the side length) must be a multiple of the horizontal displacement
K (in the number of MRs) and the vertical displacement L between adjacent GRs.
In addition, the numbers of MRs in the universe should be a multiple of K2 + L2.
From these considerations, for a 100 m grid size of MRs, we choose a 12 km x 12 km
square universe. This universe size meets these requirements for all the GR topologies
simulated in later chapters.

CHAPTER 2. SIMULATED NETWORK 24
Table 2.2: PHY configuration
Noise floor -98 dBm
Transmit power MR = 20 dBm, EU = 15 dBm
Antenna gain (omni-directional) MR = 5 dBi, EU = 0 dBi
Antenna height MR = 5 m, EU = 1.5 m
Table 2.3: PHY transmission data rate vs. average received SINR
SINR (dB) 12 15 20 21 25 28 30
Data Rate (Mbps) 6 12 18 24 36 48 54
2.5 PHY Configurations
We consider a set of modulation and coding schemes similar to those of the IEEE
802.11a/g PHY interface that has multiple PHY modes supporting data rates of 6
to 54 Mbps. The carrier frequency band is assumed to be around 2.4 GHz, and one
frequency channel of about 20 MHz bandwidth is assumed.
As mentioned in Section 2.4.2, the small-scale fading of the radio propagation
is not directly simulated in this thesis. Rather, we obtain the error performance of
the assumed PHY interface due to small-scale fading through separate simulations.
Table 2.3 shows the 7 transmission modes simulated, adopted from [27] for packet
error rate (PER) less than 10−1 for packet lengths of 54 to 512 bytes. Although
the data size transmitted over one data time slot is much larger than 512 bytes
(DATA TX in Fig. 2.2 is 0.95 msec), data are assumed to be transmitted in packets
of a similar size up to 512 bytes. Given the average received SINR calculated in a
simulation step, a packet is declared successfully received if the SINR exceeds the
threshold corresponding to the PHY transmission mode of the packet.
2.6 Traffic Scenario
We consider only outdoor EUs and they arrive uniformly along streets across the
network according to a Poisson process, and once generated, they remain at their

CHAPTER 2. SIMULATED NETWORK 25
initial locations throughout their lifetime. Each EU generates one uplink session that
is best-effort (i.e., without delay or throughput constraints) web traffic. Each session
generates one page whose size is Pareto distributed with α = 1.7584 and β = 30458
bytes, resulting in the mean size of 70.6 kilobytes. The models and parameters for
the traffic statistics are based on the work in [28].
2.7 WMN Simulator
2.7.1 Overview
A simulator has been created for the WMN described in this chapter. The simula-
tor implements the radio propagation models described in Section 2.4 for a heavily
built-in urban area over a 12 km x 12 km wrapped-around universe. The simulator
also captures the stochastic network behavior resulting from random traffic arrivals,
admission and congestion control, and queueing. The enormous size and computa-
tional complexity of the simulator is addressed using a parallel-processing technique
that utilizes multiple processors interconnected with high-speed inter-processor links
and associated with large high-speed memory. The parallel-processing technique is
presented in Appendix A.
Each data point for the WMN performance presented in this thesis is obtained
from one long simulation run. Each simulation run uses 16 processors simultaneously
and typically takes several days and sometimes more than a week depending on
the simulation scenario. When calculating the final performance results from each
simulation run, we take only those data that are collected after the network reaches a
steady state. As the simulation evolves, we keep track of the number of active network
entities and each of the performance metrics. The network is seen to enter a steady
state when the number of active network entities and each of the performance metrics
start to converge. It is after this point that data are collected for final performance
results.

CHAPTER 2. SIMULATED NETWORK 26
Pre-synchronize database for parallel processing
Update existing network entities
Introduce new traffic
Post-synchronize database for parallel processing
Initialize database for parallel processingInitialize database for network set-up
Place MRs and GRsSet up shadow maps
Run control time slot assignment protocol
Construct routing tables
Each simulation
time step
Figure 2.10: Overall simulation routine

CHAPTER 2. SIMULATED NETWORK 27
2.7.2 Simulation Routine
The simulator is time-driven with a time step of 1 msec (the size of one control
or data time slot in Fig. 2.2). Fig. 2.10 illustrates the overall simulation routine.
Each simulation run begins with a set of operations that initializes the simulator for
parallel processing and sets up the network such as placing MRs and GRs, generating
shadow maps for MRs, etc. The simulator then runs the control time slot assignment
protocol in Chapter 3. It either runs the protocol from scratch or loads the results of
the protocol from a data file previously generated and stored for the same simulation
configuration. Once the control time slots are assigned, the simulator then runs
the routing protocol described in Section 4.7 to construct routing tables at MRs.
When these initializations are completed, the simulator repeatedly performs a set of
operations each simulation time step.
Operations performed during each simulation time step can be grouped into four
groups as shown in Fig. 2.10. First, databases are pre-synchronized for parallel pro-
cessing. Then, existing network entities (i.e., EUs and MRs) are updated. Next, new
traffic is introduced to the network. Finally, databases are post-synchronized for par-
allel processing. Operations for synchronization for parallel processing are described
in detail in Appendix A.
Operations that update existing network entities are performed as follows. When
the simulation time step corresponds to a control time slot, each of the MRs that
have been assigned the corresponding control time slot performs the following: 1) it
processes the resource requests made by its neighbor MRs and updates its database
accordingly, 2) it makes its own resource requests to its neighbor MRs, 3) it transmits
to corresponding neighbor MRs the resource requests results and its own new requests,
and 4) it also admits new EUs who requested admission during the current control
time slot. See Section 4.2 for details on the resource negotiation process among one-
hop neighbor MRs and between an EU and its associated MR.
If the simulation time step corresponds to a data time slot, each of the EUs
and MRs that have the corresponding data time slot assigned or reserved for its
data transmission transmits data packets and updates its database accordingly. See
Section 4.5 for details on data transmission and retransmission.

CHAPTER 2. SIMULATED NETWORK 28
2.8 Chapter Summary
In this chapter, we described the WMN studied in this thesis. We first described the
network architecture and its envisioned application scenario. We then explained the
TDMA/TDD-based MAC framework and the overall network operations within the
framework. We also described the WMN simulator created for this thesis research
including the radio propagation environment and its simulation models and method-
ology, PHY considerations, and user traffic statistics. We also illustrated the overall
simulation flow.

Chapter 3
Control Time Slot Assignment
Protocol
3.1 Introduction
As described in Section 2.3, the WMN considered in this thesis utilizes control time
slots for various control operations. Assigning broadcast time slots to network entities
in a multi-hop wireless network has been studied in TDMA/FDMA-based multi-hop
wireless networks [14, 15, 29–32]. Reference [14] develops a medium access control
protocol for stationary ad-hoc networks within a time-slotted framework. Time is
divided into time slots and time slots are grouped into frames. Each time slot consists
of several control subslots (or mini-slots) and one data subslot. The protocol allows
nodes to contend for and reserve time slots through handshakes over control subslots
based on a collision-avoidance approach, and once a time slot is reserved, data packets
are exchanged over its data subslot free from collision. Another broadcast time slot
assignment protocol is created in [15] for mobile ad-hoc networks within a TDMA-
based framework. Time is divided into time slots and time slots are grouped into
frames. There are two types of frames: control frame and information frame. A
control frame is followed by a number of information frames. Similar to [14], the
protocol employs contention-based five-phase handshakes over control slots within a
control frame to reserve data slots within information frames.
29

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 30
Scheduling of broadcast time slots within a TDMA framework is also studied
in [29–31]. Reference [30] proposes distributed scheduling algorithms that utilize a
control channel that operates on a contention-based approach, similar to [14, 15].
Reference [31] shows that the problem of assigning broadcast time slots among nodes
for multi-hop wireless networks is NP-complete and proposes a distributed algorithm.
On the other hand, reference [32] provides a unified algorithm for assigning channels
(time, frequency, or code for a TDMA/FDMA/CDMA framework, respectively) to
network nodes or links between network nodes. Based on a directed graph model for
multi-hop networks, the author identifies atomic constrains that characterize such an
assignment problem and provides a unified algorithm to the problem.
In these studies, the underlying physical-layer behavior and the interactions among
network entities have been often oversimplified by not representing the vagaries of
radio propagation and interference encountered in actual networks. For example,
it is assumed that two nodes either perfectly communicate with each other or do
not interact with each other at all. In reality, however, even when two nodes cannot
communicate with each other, a node may still interfere with another node depending
on the propagation condition between the two nodes. Moreover, interference from
many interfering nodes may add up to a level significant enough to block any successful
packet reception at a node. Due to these different assumptions on models for radio
propagation and interference calculation, these protocols are not directly applicable
to the network considered in this thesis.
In this chapter, we design a protocol through which every MR in the WMN
acquires one broadcast time slot that supports a minimum average received SINR
from the MR to all of its neighbor MRs. Neighborhood is defined in Section 3.2.2.
The acquired broadcast time slot is used for exchanging control packets among one-
hop neighbor MRs and between MRs and their associated EUs. The protocol is based
on contention-based reservation mechanisms in a topology-dependent manner similar
to those in [14, 15], yet incorporating more realistic, measurement-based models for
the underlying physical-layer characteristics and behavior described in Section 2.4.
The protocol operates in a fully distributed manner.
As described in Section 2.3, once control time slots are assigned to MRs, the

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 31
network starts to run the routing protocol described in Section 4.7 to construct routing
tables at MRs. Once the network is set up, it enters the normal operation phase during
which it executes the data time slot access control protocol in Chapter 4 to serve EUs.
As described in Chapter 4, the data time slot access control protocol utilizes control
time slots for resource negotiation and allocation among MRs and EUs.
This chapter is organized as follows. It first explains the basic mechanisms of the
protocol and delineates the full operations. Selection criteria of the protocol param-
eters are also given. Furthermore, a power control scheme is introduced that allows
better utilization of resources for maintaining control time slots. Other design consid-
erations of the protocol are discussed including protocol initialization and deadlock
resolution. Extensive simulation results are then presented and discussed: the proto-
col is shown to support the target minimum average received SINR over all neighbor
pairs of MRs in all simulated scenarios. In addition, the sensitivities of the protocol
to the amount of shadowing of the radio propagation and to the GR topology are
determined. The benefit of the power control scheme is also demonstrated.
3.2 Protocol Overview
We consider a TDMA and TDD based framework as described in Section 2.3. The
frame structure is repeated in Fig. 3.1. Through the protocol, each MR in the network
becomes associated with one broadcast control time slot. The protocol guarantees a
target average received SINR over each control time slot (over tBUSY in Fig. 3.1)
between a MR associated with the control time slot and each of its one-hop neighbor
MRs so that control packets exchanged between the MR and its neighbor MRs are
received successfully in the presence of co-channel interferers. The protocol incorpo-
rates measurement-based models for radio propagation and interference calculation
described in Section 2.4.

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 32
tBUSY rBUSY tBUSY/RTS NACK RA
CTRL SLOTDATA SLOT
... ... ...FRAME 0 FRAME 1
DATA_TXDATA_ACK
Figure 3.1: The network frame structure: time is slotted into control and data timeslots and each time slot comprises multiple subslots. See Section 3.3 for detailedexplanation of each of the control subslots.
3.2.1 Basic Mechanisms
MRs acquire a control time slot through contention, and once contention is successful,
they access the reserved slot exclusively. The protocol employs two basic mechanisms:
busy tones and negative acknowledgment. A busy tone is transmitted to inform other
nodes of the presence of an active communication link occurring during a specific
time slot and discourages other nodes from contending for the same time slot. There
are two types of busy tones: transmit busy tones (tBUSYs) and receive busy tones
(rBUSYs). For an active transmission over a specific time period over a link, the
transmit node of the active transmission may transmit a tBUSY packet to inform
other nodes of its active transmission over that specific time period. On the other
hand, the receive node of the link may transmit an rBUSY packet (over a different
time period when the active transmission is not occurring) to inform other nodes of
its active reception over that specific time period.
Utilizing rBUSY packets can help mitigate the hidden node problem as in [14,
15, 33]. The hidden node problem refers to the situation in which a node that does
not know of an active reception at a nearby node transmits a packet assuming the
wireless medium is available, and has its packet collide with the packets being received
at the nearby node. However, the hidden node problem cannot be completely solved
with rBUSY packets alone as illustrated in Section 3.6, and the protocol employs an
additional mechanism to mitigate the problem.

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 33
Another basic mechanism employed is negative acknowledgment (NACK) [14,15]
which is a notification of an unsuccessful transmission. For a broadcast transmission
for which more than one receive node can exist, it is not straightforward to arrange
or schedule each of the receive nodes to transmit positive acknowledgment packets
(ACKs), particularly when the number and topology of receive nodes are not known
a priori at the transmit node. We thus choose to utilize NACK packets. As explained
in Section 3.3.4, a receive node transmits a NACK packet when it measures a received
radio power level exceeding a threshold but cannot decode the received signal. It is
possible that there are more than one receive node that transmit a NACK packet for
the same transmission. In this case, the transmit node does not need to decode every
NACK message that it detects but only has to know whether there was any NACK
packet sent to it. Thus, to learn about a transmission failure, the transmit node
simply measures the received radio power level over a time period where a NACK
message may be received.
3.2.2 Notation and Terminology
We denote the average received signal power and SINR from node T to node R during
subslot SS as PT→R,SS and SINRT→R,SS, respectively, and the total power, i.e., signal
plus interference, as Pr,SS.
In the protocol, MR A is defined to be a neighbor MR of MR B if and only if:
PB→A ≥ PTH NBR. (3.1)
PTH NBR determines the neighborhood topology and its selection criteria are discussed
in Section 3.5.1. The average received signal power, PB→A, is determined by the large-
scale variation of radio propagation. It is constant for a fixed pair of transmit and
receive locations when the system configurations and the surrounding environment
remain the same as discussed in Section 2.4.2. This property is called the reciprocity
of the radio propagation. Therefore, the notion of neighborhood based on the average
received signal strength is symmetric when the transmit power level and other system
configurations and the surrounding environment remain the same: if MR A is a

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 34
neighbor of MR B, then MR B is also a neighbor of MR A.
3.3 Operations
In this section, we describe the protocol operations performed over each of the control
subslots in each of the time slots shown in Fig. 3.1.
3.3.1 tBUSY
Recall that over this subslot, MRs exchange control messages during the normal
network operation phase. The protocol ensures this subslot to be conflict-free, i.e., a
minimum average received SINR is supported on every link for a neighbor MR pair
active on the subslot. During this subslot, MRs that have acquired the corresponding
control time slot transmit tBUSY packets. On the other hand, contending MRs that
have not yet acquired a control time slot listen and measure received power level over
this subslot. A contending MR can contend for this control time slot only if:
Pr,tBUSY < PTH T (3.2)
That is, a contending MR must have its received power level over tBUSY below a
threshold for it to be eligible to contend for the corresponding control time slot. See
Section 3.5.3 for discussions on the effect of PTH T on the protocol performance and
its selection criteria.
3.3.2 rBUSY
During this subslot, a MR transmits an rBUSY packet if it has “discovered” the
network (see Section 3.8 for the network discovery process) and received a successful
transmission from one and only one of its neighbor MRs during the preceding subslot
tBUSY. In other words, a MR R transmits an rBUSY packet if it has a neighbor MR

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 35
T such that:
PT→R,tBUSY ≥ PTH NBR (3.3)
SINRT→R,tBUSY ≥ SINRTH (3.4)
PI→R,tBUSY < PTH NBR for all I 6= T. (3.5)
Here, SINRTH is the target minimum average received SINR that the protocol guar-
antees. See Section 3.5.2 for its selection criteria. Condition (3.4) can be checked
from whether the received message is successfully decoded or not because a tBUSY
packet is assumed to require SINRTH for successful decoding. If the received tBUSY
packet is successfully decoded (i.e., condition (3.4) holds true), then condition (3.3)
can be checked by extracting the received signal power PT→R,tBUSY from the aggre-
gate received power Pr,tBUSY . Condition (3.5), on the other hand, may not be strictly
checked even when Eqn. (3.3) and (3.4) hold true because the interference power from
each interfering node may not be extracted from the composite interference power due
to insufficient “SINR” for that interfering node to be successfully decoded and ex-
tracted. As a sufficient condition, instead, the protocol checks whether the composite
interference power satisfies Pr,tBUSY − PT→R,tBUSY < PTH NBR when conditions (3.3)
and (3.4) hold true.
Contending MRs, on the other hand, listen to the rBUSY packets and measure
the received power level. A contending MR is allowed to contend for this control time
slot only if:
Pr,rBUSY < PTH R (3.6)
That is, a contending MR must have its received power level over rBUSY below a
threshold for it to be eligible to contend for the corresponding control time slot. See
Section 3.5.4 for discussions on the effect of PTH R on the protocol performance and
its selection criteria.

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 36
3.3.3 tBUSY/RTS
During this subslot, two groups of MRs transmit. A MR transmits a tBUSY packet
if it transmitted a tBUSY packet during subslot tBUSY within the same control time
slot. Also, a MR transmits a request packet, ready-to-send (RTS), if it i) has not yet
acquired a control time slot, ii) finds the current time slot to be the least numbered
slot that satisfies conditions (3.2) and (3.6) (see Section 3.4 for slot selection strategy),
and iii) its backoff counter has decremented to zero. The simultaneous transmission
by both groups of MRs ensures that a new request for a control time slot is approved
based on the existing interference from all active transmissions over the same control
time slot.
3.3.4 NACK
During this subslot, a MR transmits a NACK message if it does not meet condi-
tions (3.3) - (3.5) during subslot tBUSY/RTS for a neighbor MR. Specifically, a MR
R transmit a NACK message if:
SINRT→R,tBUSY/RTS < SINRTH (3.7)
Pr,tBUSY/RTS > (1 +1
SINRTH
) PTH NBR (3.8)
are satisfied, or
PT→R,tBUSY/RTS ≥ PTH NBR (3.9)
SINRT→R,tBUSY/RTS ≥ SINRTH (3.10)
Pr,tBUSY/RTS − PT→R,tBUSY/RTS ≥ PTH NBR (3.11)
are met. Here, T is the strongest transmit MR received at R.
To interpret the above conditions, consider an example in which two MRs A and
B transmit during subslot tBUSY/RTS and a MR R receives them with an average
received signal power of PA and PB respectively. For the simplicity of illustration, we
ignore the receiver noise power N . Ideally, MR R has to transmit a NACK packet if

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 37
PA
PB
PTH_NBR
PTH_NBR R2
R1
R3
R1
R1
PB = (1 / SINRTH) x PA
PB = SINRTH x PAR2
Figure 3.2: Example of conditions for transmitting NACK packets for two transmitMRs A and B that are received at a MR with average received power PA and PBrespectively.
and only if (PA, PB) falls within the region R1 ∪ R2 in Fig. 3.2. However, a receive
MR cannot extract region R3 from R1 ∪ R3 because the best SINR from either MR
A or B is lower than the decodable threshold SINRTH . Thus, R1 ∪R3 is examined
together in conditions (3.7) - (3.8). In Section 3.10.5, we compare the simulation
results with and without the region R3 included in the conditions for transmitting
NACK packets. Cases corresponding to the region R2, on the other hand, can be
easily verified. The packet with the best SINR is decoded successfully as the SINR
exceeds the decoding threshold SINRTH . Then, the received signal power from the
weaker transmit node can be determined by extracting the stronger signal power from
the total received power, and can be checked whether it exceeds PTH NBR or not.
There are three possible scenarios in which the conditions for transmitting NACK
packets are satisfied at a MR.
1) The first scenario is that in which multiple RTS packets collide at a MR, which
then transmits a NACK message. Any contending MR backs off if:
Pr,NACK ≥ PTH NBR (3.12)

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 38
We use a uniform random backoff scheme with a fixed-sized window. A contending
MR gives up on a particular time slot if it fails to acquire the slot after a maximum
number of trials. A window size of 8 and a maximum number of trials of 3 were
found effective in all simulated scenarios. It is possible that two close MRs transmit
RTS packets simultaneously and no other MR is present close enough to detect the
collision. We discuss how to resolve this deadlock in Section 3.9.
2) A NACK packet is also transmitted when an RTS packet is not received suc-
cessfully due to interference from other active links on the same control time slot.
Although a contending MR finds the slot to satisfy condition (3.2), the actual inter-
ference from other active links received at one of its neighbor MRs may be too high
to support the minimum SINR on the requested link over the time slot. In this case,
those active interfering MRs are “hidden” at this contending MR.
3) The third scenario is the case in which an active link is degraded due to accumu-
lated co-channel interference from other active links on the same slot. For example,
consider two contending MRs both of which find a particular time slot to satisfy con-
ditions (3.2) and (3.6). Assume that the two contending MRs are placed far apart
from each other and successfully acquire the same slot. The additional interference
from these successful MRs now may cause some other active links to degrade, espe-
cially those links with the supported SINR near the minimum level SINRTH . When
the degradation is detected at a MR, the MR stops transmitting rBUSY packets over
subslot rBUSY and transmit NACK packets within the same control time slot. Upon
hearing such a NACK packet, the transmit MR of the degraded link learns about the
degradation at one of its neighbor MRs and releases its acquired control time slot.
Then, it repeats the acquisition process to acquire another control time slot.
3.4 Time Slot Selection Strategy
As a MR contends for a control time slot, it may find more than one slot feasible
for which to contend. The protocol thus needs to employ a slot selection strategy.
Assigning a broadcast time slot to a node in a wireless network can be converted
to vertex coloring in graph theory [31]. It is well-known that the problem of vertex

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 39
coloring with the minimal number of colors is NP-complete [34], and many heuristic
algorithms have been proposed [15,31,32,35]. Among them is a greedy algorithm [32,
35]. In the scheme, colors are numbered from 0 to n−1, where n is the total number of
colors, and each node is colored with the least numbered color that does not violate
coloring constraints. In the protocol developed in this section, we have adopted a
greedy approach in a fully distributed manner: each MR scans control time slots
within a frame sequentially and contends for the first time slot that satisfies the
criteria of the protocol.
3.5 Parameter Selection
In this section, the selection criteria of the four protocol parameters are discussed.
3.5.1 PTH NBR
PTH NBR is the minimum average received signal power for a MR to be a neighbor
of another MR, and determines the neighborhood topology of MRs. Because the
average received signal power for a pair of transmit and receive locations depends
on the propagation environment, antenna configurations, transmit power, operating
frequency, etc., PTH NBR should be selected taking such factors into account. Several
selection criteria may be considered for PTH NBR. The protocol employs the follow-
ing criterion: at least 99.9 % of the MRs in the network have at least 2 neighbors
MRs within 400 m for the network topology and the radio propagation environment
described in Section 2.4 and Table 2.1. One can choose a different number than
99.9% for the fraction of MRs that have at least two neighbor MRs within a certain,
reasonable range in distance. In this thesis, 99.9% is chosen so that “essentially all”
MRs satisfy the neighborhood condition. Table 3.1 shows the probability for a MR
to have at least 2 neighbor MRs within 400 m for a range of standard deviation (σ)
values of the log-normal shadowing process under the simulated scenario. We choose
the maximum value of PTH NBR that satisfies the criterion: PTH NBR = -50 dBm for
σ = 4 dB and 8 dB, and -46 dBm for σ = 0 dB. As shown in the scatter plot of the

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 40
average received signal power versus the separation distance of neighbor MR pairs in
Fig. 3.3, the separation distance of a neighbor MR pair ranges widely for PTH NBR =
-50 dBm and σS = 4 dB, and the average received signal power level varies greatly
at a given separation distance due to shadowing.
Table 3.1: Probability for a MR to have at least 2 neighbor MRs within 400 metersunder the simulated network topology and radio propagation environment.
PTH NBR (dBm) σ = 0 dB σ = 4 dB σ = 8 dB
-45 0 0.7497 0.9254
-46 1.0000 0.8795 0.9606
-47 1.0000 0.9548 0.9813
-48 1.0000 0.9874 0.9921
-49 1.0000 0.9975 0.9970
-50 1.0000 1.0000 0.9990
-51 1.0000 1.0000 0.9997
-52 1.0000 1.0000 0.9999
-53 1.0000 1.0000 1.0000
3.5.2 SINRTH
SINRTH is the minimum average received SINR for a control packet to be decoded
successfully. In the thesis, we consider PHY configurations similar to those of the
IEEE 802.11a/g PHY standards [13] as mentioned in Section 2.5, and particularly,
we assume the lowest-rate PHY transmission mode for transmitting control packets.
Simulation results in [27] showed that 12 dB is a reasonable SNR value for packet error
rate (PER) of less than 10−1 for packet lengths of 54 - 512 bytes in the lowest-rate
PHY transmission mode. Thus, we choose SINRTH = 12 dB for the protocol. See
Table 2.2 for the PHY transmission modes and their corresponding threshold SINR
values adopted in this thesis.

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 41
0 100 200 300 400 500 600 700 800−52
−50
−48
−46
−44
−42
−40
−38
−36
−34
−32
separation (m)
Aver
age
rece
ived
pow
er (
dB
m)
Separation vs. average received power between two neighbors
Figure 3.3: Scatter plot of average received signal power vs. separation for a pair ofneighbor MRs, PTH NBR = -50 dBm and σS = 4 dB
3.5.3 PTH T
PTH T in Eqn. (3.2) is the maximum total radio power received at a contending MR
over subslot tBUSY in order for the MR to contend for the corresponding control
time slot. PTH T needs to be low enough so that the target minimum SINR level can
be supported not only for the new links between this contending MR and its neighbor
MRs but also for existing links even after this contending MR successfully acquires
this control time slot. PTH T can be chosen as follows:
PTH T =PTH NBR
αT × SINRTH
(3.13)
where αT ≥ 1 is a margin that incorporates the discrepancy between the co-channel
interference that the contending MR perceives and the actual level at the neighbor
MRs of the contending MR. Note that for a smaller value of PTH T or equivalently
for a larger value of αT , the contention among MRs for a specific slot becomes more

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 42
conservative, i.e., fewer MRs contend for the same control time slot. See Section 3.10.1
in which different values of αT are considered to determine its effect on the overall
protocol performance and its selection criterion is discussed.
3.5.4 PTH R
PTH R in Eqn. (3.6) is the maximum total radio power received at a contending MR
over subslot rBUSY in order for the MR to contend for the corresponding control time
slot. Similar to PTH T , PTH R needs to be low enough so that the target minimum
SINR level can be supported not only for the new links between this contending MR
and its neighbor MRs but also for existing links. PTH R can be chosen as follows:
PTH R =PTH NBR
αR × SINRTH
(3.14)
where αR ≥ 1. See Section 3.10.1 in which different values of αR are considered to
determine its effect on the overall protocol performance and its selection criterion is
discussed.
3.6 Hidden Node Problem Revisited
We now show that when an active link has co-channel interferers, a contending MR
can degrade the link even with a large αR in Eqn. (3.14). For the simplicity of
illustration, we ignore the receiver noise power N . Consider an example of a transmit
MR T transmitting to a receive MR R and a contending MR A. Let
SIRT→R,old =PT→R∑I∈SI
PI→R
≡ β × SINRTH β ≥ 1 (3.15)
PT→R ≡ γ × PTH NBR γ ≥ 1 (3.16)
PA→R ≡ PTH NBR
α× SINRTH
α ≥ 1 (3.17)

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 43
11/αR γ
1/β + 1/(αRγ) = 1R3
β
1
αR /(αR-1)
R1
R2
Figure 3.4: Illustration of the condition in Eqn. (3.18) for an active link to becomedegraded due to a new contending MR.
where SIRT→R,old is the average received SIR of the active link T → R during subslot
tBUSY before the contending MR A transmits, SI is the set of co-channel interferers
that transmit tBUSY packets over the same control time slot, PT→R is the average
received signal power at MR R from MR T , PA→R is the average received signal power
at MR R from the contending MR A. Then,
SIRT→R,new =PT→R
PA→R +∑I∈SI
PI→R
=1
β−1 + (α× γ)−1× SINRTH
The active link T → R does not get degraded by the contending MR A if and only if:
β−1 + (α× γ)−1 ≤ 1 (3.18)
In other words, an active link can be degraded by a new link if the associated time
slot is contended for by a MR A that satisfies αR < α < β/((β − 1)γ) where α, β,
and γ are as defined in Eqn. (3.17), (3.15) and (3.16), respectively.
Fig. 3.4 illustrates different regions of (γ, β) with respect to the boundary in

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 44
Eqn. (3.18) for α = αR. If (γ, β) ∈ R1 ∪ R2, the active link is not degraded by
the contending MR A with α > αR. That is, (γ, β) stays in R1 ∪ R2 even after
the contending MR succeeds in acquiring the control time slot. On the other hand, if
(γ, β) ∈ R3, the active link may become degraded by the contending MR A depending
on the value of α of the contending MR. That is, (γ, β) may fall in R3 due to the
transmission by the contending MR. This potential degradation of active links by
new links implies that the hidden node terminal problem cannot be resolved by using
rBUSY packets alone. The protocol provides a mechanism to detect and resolve
such degradation of active links by utilizing NACK packets as described by the third
scenario of transmitting NACK packets in Section 3.3.4.
3.7 Power Control of Receive Busy Tones
So far, we have assumed a constant and known transmit power level Ptx max for rBUSY
packets as well as other transmissions on control subslots. The transmit power level
of rBUSY packets can be adaptively controlled in order to reduce the number of
required control time slots while still meeting the protocol goal.
Consider an active receive MR R and a contending MR A. Let MR R transmit a
rBUSY packet at Ptx ≡ Ptx max/δR, δR ≥ 1. Let tBUSY packets and RTS packets be
transmitted at Ptx max as before. Assume that conditions (3.2) and (3.6) are met at
the contending MR A. Then, we have
Pr,rBUSY = PR→A(Ptx max/δR) +∑I∈SI
PI→A(Ptx max/δI) +N < PTH R
where Pr,rBUSY is the total average received radio power at the contending MR A
during subslot rBUSY, PR→A(Ptx max/δR) is the average received signal power from
MR R at the contending MR A with the transmit power level of Ptx max/δR, SI is the
set of MRs excluding MR R that transmit rBUSY packets over the same control time
slot, and PI→A(Ptx max/δI) is the average receive signal power from MR I at MR A

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 45
with the transmit power level of Ptx max/δI . We then have
PA→R(Ptx max) < δR × PTH R (3.19)
PA→I(Ptx max) < δI × PTH R for all I ∈ SI (3.20)
where PA→R(Ptx max) is the received signal power level at MR R from MR A with the
transmit power level of Ptx max and PI→R(Ptx max) is that from MR I ∈ SI .By substituting Eqn. (3.17) and Eqn. (3.14) to Eqn. (3.19) gives:
α >αRδR, δR ≥ 1 (3.21)
That is, a contending MR A with α < αR or equivalently PA→R > PTH R may now
contend for this control time slot, leading to more aggressive contention on the slot
and ultimately allowing better utilization of control time slots across the network.
We choose δR for the active receive MR R as follows:
δR = max (1, αRβ − 1
βγ) (3.22)
where αR, β, and γ are as defined in Eqn. (3.14), (3.15) and (3.16), respectively. Note
that δR in Eqn. (3.22) has the following property: if the active link satisfies Eqn. (3.18)
for α = αR (i.e., (γ, β) ∈ R1 ∪ R2 in Fig. 3.4), the link is not degraded (i.e., (γ, β)
stays in R1 ∪ R2 in Fig. 3.4) when the receive MR R of the link employs the above
power control policy and the contending MR A follows the original contention rules,
i.e., Eqn. (3.2) and Eqn. (3.6). On the other hand, if the active link does not satisfy
Eqn. (3.18) for α = αR (i.e., (γ, β) ∈ R3 in Fig. 3.4), δR in Eqn. (3.22) becomes 1
and the active link is thus not affected by the power control policy.
δR in Eqn. (3.22) can be interpreted as the margin in γ with respect to the value on
the boundary of Eqn. (3.18) for given β when (γ, β) satisfies Eqn. (3.18) for α = αR.
That is, δR corresponds to the horizontal distance between the value of γ in R1∪R2
in Fig. 3.4 and the corresponding value of γ on the boundary of R1 ∪ R2 in Fig. 3.4
for the same β. The power control scheme exploits the margin in the received signal
power over the neighbor link T → R with respect to PTH NBR without degrading

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 46
the link. We examine the protocol performance with the power control scheme in
Section 3.10.3.
3.8 Protocol Initialization
To support operations within the TDMA and TDD framework described in Sec-
tion 2.3, the WMN needs to be synchronized across the network. The network-wide
synchronization is achieved with the aid of the backbone network. More specifically,
MRs co-located with GRs are synchronized to GRs which in turn are synchronized
to the backbone network, and these MRs initiate the protocol. MRs not co-located
with GRs, on the other hand, first listen to control messages transmitted by those
MRs co-located with GRs in order to discover the network. A MR R discovers the
network if it identifies a MR T such that:
PT→R,tBUSY ≥ PTH NBR (3.23)
SINRT→R,tBUSY ≥ SINRTH (3.24)
In other words, a MR discovers the network by receiving and decoding a control
packet transmitted by one of its neighbor MRs that have already acquired a control
time slot.
The aforementioned sequential initialization procedure is effective when the den-
sity of GRs is sparse enough. In the cases of (#MRs):(#GRs) = 80:1, 40:1, 20:1,
10:1, and 5:1 studied in Section 3.10.4 and in Section 5.2, the sequential initialization
procedure is very effective in all simulated scenarios. In the case of a sparse GR topol-
ogy, it is rare but possible that before a MR discovers the network, all of its neighbor
MRs acquire a control time slot, but yet none of them supports the minimum SINR
to the MR. For example, in all simulations under (#MRs):(#GRs) = 40:1, we have
observed one instance where one MR out of 14400 MRs could not discover the net-
work by Eqn. (3.23) and (3.24). In that case, we let such a MR transmit a NACK
message over subslot NACK of a control time slot over which the MR receives a total
power level larger than PTH NBR in Eqn. (3.23). Then, the neighbor MR on that

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 47
control time slot releases the slot upon hearing the NACK message and re-contends
for another. Here, we assume that after listening to non-decodable messages with the
received power level in Eqn. (3.23) for an extended period of time, the MR can get
synchronized to the beginning of those slots, i.e., beginning of subslot tBUSY.
In the case of (#MRs):(#GRs) = 2:1 in which every other MR is co-located with a
GR the sequential initialization procedure is not effective. According to the sequential
initialization procedure, every other MR that is co-located with a GR is initialized to
transmit a tBUSY packet on subslot tBUSY of the first control time slot all at the
same time. In that case, the received interference level on the first control time slot
at a MR that is not co-located with a GR is too high so that the MR cannot find a
neighbor MR for which Eqn. (3.24) holds true.
Two approaches are possible to break this initialization deadlock. One is to have
each of those MRs that are not co-located with a GR transmit a NACK packet ac-
cording to the procedure described above for the case of a sparse GR topology and
have MRs co-located with a GR release the first control time slot upon hearing the
NACK packet. Another approach is to modify the sequential initialization procedure
as follows: we have MRs co-located with a GR initiate the protocol not simultaneously
but at different instants of time. For example, a random start time can be introduced
when a MR co-located with a GR initiates the protocol. Because the sequential ini-
tialization is found effective in the case of (#MRs):(#GRs) = 5:1 under the simulated
radio propagation environment and network configurations, a random start time cho-
sen over 5 or more possibilities would be effective. In the latter approach, it still
would be necessary to transmit NACK packets to resolve any remaining initialization
deadlocks seen in the case of a sparse GR topology.
In the case of (#MRs):(#GRs) = 1:1 in which every MR is co-located with a
GR (i.e., the WMN is not a multi-hop network any more but a traditional single-hop
network), a similar consideration is made. Because now all MRs are simultaneously
initialized to transmit a tBUSY packet on subslot tBUSY of the first control time
slot, there is no other MR that can NACK and break the deadlock. In this case, as
with the case of (#MRs):(#GRs) = 2:1, it would be effective to introduce different
start times, e.g., random start times, for MRs co-located with GRs to initiate the

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 48
protocol along with NACK packets.
For the simulation results studied later in Section 5.2 for the cases of (#MRs):(#GRs)
= 2:1 and 1:1, we adopt the control time slot assignment result for the case of
(#MRs):(#GRs) = 5:1. As demonstrated in Section 3.10.4, the effect of the GR
topology is negligible on the overall protocol performance. Thus, adopting the con-
trol time slot assignment result from another GR topology would not affect the overall
WMN performance for serving EUs. However, in real networks, the control time slot
assignment result for a different GR topology may not be available and thus, one
of the approaches for breaking an initialization deadlock mentioned described above
would be necessary.
3.9 Deadlock Resolution
As mentioned in Section 3.3.4, when two neighbor MRs transmit RTS packets at the
same time with no other MR to detect the collision, both of them acquire the same
slot and form a deadlock. In the simulations, we had such cases very rarely, e.g., a few
out of more than 45000 pairs of neighbor MRs in the case of (#MRs):(#GRs) = 40:1.
Such deadlock can be resolved as follows: after all MRs acquire a slot, they exchange
neighbor information, and construct routing tables. Then, the GRs sequentially,
e.g., the one with the lowest ID first, the one with the next lowest ID second, etc.,
command each MR in their database to stop transmitting on its control time slot
and detect any deadlock on the slot. If there is any, the MR releases the slot and
contends for another until it successfully acquires another one. In the simulations,
we examine MRs sequentially after all of them acquire a control time slot. If there
is any deadlock formed for a pair of MRs, we let the one with a lower ID release the
slot, and re-contend for another.
3.10 Simulation Results
In this section, we present the protocol performance under various simulation scenar-
ios. We first give the baseline performance under different contention levels among

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 49
contenting MRs. We then present the protocol performance sensitivity to different
levels of severity of the log-normal shadowing. In addition, the protocol performance
employing the power control policy of receive busy tones is demonstrated. Finally,
we vary the topology of GRs and discuss its effect on the protocol performance.
3.10.1 Baseline Performance
We present the protocol performance for the reference scenario of σS = 4 dB without
the power control scheme employed. Fig. 3.5-(a) shows the number of MRs that
have acquired each control time slot and Fig. 3.5-(b) presents the resultant SINR
distribution over links between a pair of neighbor MRs for different values of αR. In
all cases, we set αT = αR. Fig. 3.5-(b) confirms that the protocol indeed guarantees
the minimum target SINR of 12 dB in all scenarios. Moreover, the slot utilization
in Fig. 3.5-(a) is consistent with the slot selection strategy described in Section 3.4:
a control time slot with a lower index is generally reused more than one with a
higher slot index. Note that slot utilization drops quickly once it starts to decrease
noticeably toward the highest index, and the majority of the time slots become reused
to a similar extent. As αR increases, the number of control time slots used increases
and the average received SINR improves. This is because a larger value of αT and
αR translates to tighter contention rules in Eqn. (3.2) and Eqn. (3.6) as discussed in
Section 3.5.3 and Section 3.5.4, respectively. For 1 dB increase in αR = αT , we have
2 or 3 more time slots required and about 1 dB higher average SINR. We choose αR
= αT = 1 dB for subsequent simulations as the value requires the fewest control time
slots (and thus least system overhead) among the values considered in this section.
3.10.2 Effect of Shadowing
Fig. 3.6 presents the protocol performance for different values of σS where σS denotes
the standard deviation of the log-normal shadowing. Clearly, for a larger σS, more
control time slots are required. Moreover, the resultant SINR values are higher on
average and spread more. Recall that the neighborhood of MRs in this thesis is defined
based on the average received signal power as explained in Section 3.2.2. Thus, for a

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 50
0 20 40 60 80 1000
50
100
150
200
250
300
CONTROL SLOT INDEX
NU
MB
ER
OF
ME
SH
RO
UT
ER
S
SLOT DISTRIBUTION AMONG MESH ROUTERS
α
R = 1 dB
αR
= 2 dB
αR
= 3 dB
(a)
0 10 20 30 40 500
0.01
0.02
0.03
0.04
0.05
0.06SINR DISTRIBUTION OF NEIGHBOR LINKS
SINR (dB)
FR
AC
TIO
N O
F L
INK
S
α
R = 1 dB
αR
= 2 dB
αR
= 3 dB
(b)
Figure 3.5: (a) The number of mesh routers that acquired a specific control time slotvs. control time slot index and (b) the distribution of SINR over links between twoneighbor mesh routers, both for different values of αR. In all cases, we set αT = αR.

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 51
0 20 40 60 80 100 1200
100
200
300
400
500SLOT DISTRIBUTION AMONG MESH ROUTERS
CONTROL SLOT INDEX
NU
MB
ER
OF
ME
SH
RO
UT
ER
S
shadow = 0 dBshadow = 4 dBshadow = 8 dB
(a)
0 10 20 30 40 50 600
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
SINR DISTRIBUTION OF NEIGHBOR LINKS
SINR (dB)
FR
AC
TIO
N O
F L
INK
S
shadow = 0 dBshadow = 4 dBshadow = 8 dB
(b)
Figure 3.6: (a) The number of mesh routers that acquired a specific control timeslot vs. control time slot index and (b) the distribution of SINR over links betweentwo neighbor mesh routers, both for different values of the standard deviation of thelog-normal shadowing. In all cases, we set αT = αR = 1 dB.

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 52
larger value of σS, the neighborhood topology of MRs tends to spread more and in
a more random manner. For example, for σS = 0 dB, all neighbor MRs are located
at 100 m from a MR, while for σS = 4 dB, a non-negligible fraction of neighbor MRs
are located at or farther than 300 m as shown in Fig. 3.3.
In the case σS = 0 dB, one of the main differences in the protocol performance
compared to the reference scenario of σS = 4 dB is the fact that the number of MRs
that acquire the control time slot with slot index 0 coincides with the total number
of GRs deployed in the network as seen in Fig. 3.6-(a). Recall that these MRs co-
located with GRs initially acquire the control time slot with slot index 0 during the
initialization phase as explained in Section 3.8. In the case of σS = 0 dB, this initial
assignment allows all of these MRs to support the minimum target SINR on the
control time slot with index 0. At the same time, due to high interference on the slot
(i.e., the control time slot with slot index 0), MRs that are not co-located with GRs
cannot acquire the slot. As a result, the number of MRs that acquire the control
time slot with slot index 0 coincides with the total number of GRs deployed in the
network.
In other cases of σS > 0, on the other hand, some of the MRs co-located with
GRs have to release the control time slot with slot index 0 that is assigned during
the initialization phase because they cannot support the minimum target SINR to
their neighbor MRs over the initially assigned slot due to the random spread of MR
neighborhood topology. At the same time, there are some MRs not co-located with
GRs that acquire the control time slot with slot index 0. As a result, the overall
utilization of the control time slot with slot index 0 becomes comparable to that of
adjacent slots as seen in Fig. 3.6-(a).
The jaggedness of the SINR distribution in the case of σS = 0 dB follows from
the fact that the possible values for the receive signal power between two MRs con-
stitute a discrete set determined by the geometry of locations of MRs as opposed to
a continuous set in the case of σS > 0. Thus the resultant accumulated interference
level received at a MR tends to cluster around the set of discrete values determined
by the geometry.

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 53
3.10.3 Performance of Power Control of Receive Busy Tones
Fig. 3.7 shows the protocol performance when the power control scheme of receive
busy tones in Section 3.7 is employed. Compared to the case of no power control,
considerably fewer control time slots are required while all neighbor links still sup-
port the minimum target SINR of 12 dB. This improvement results from the fact that
the power control scheme exploits any margin in the received signal power between a
neighbor pair of MRs as explained in Section 3.7. However, employing the power con-
trol scheme, the protocol converges more slowly. For example, it took 112 frames and
130 frames, respectively, without and with the power control. The slower convergence
is due to increased contention among MRs. In addition, more active links become
degraded and as a result, more MRs are forced to release an acquired control time
slot and re-contend for another. Finally, the dip over the first few slots in Fig. 3.7-(a)
is due to the inclusion of region R3 in Fig. 3.2 into the conditions for transmitting
NACK packets as discussed later in Section 3.10.5. With R3 excluded, we observed
no such dip; each of the first 10 control time slots had about 300 MRs. Because the
power control scheme requires fewer control time slots (thus, less system overhead),
the scheme is adopted in the simulations presented in later chapters.
3.10.4 Effect of GR Topology
Fig. 3.8 shows the protocol performance under different GR topologies (i.e., different
number and locations of GRs) while the number and locations of MRs remain the
same. It is clearly seen that the overall protocol performance in terms of the control
time slot utilization (i.e., distribution of control time slots among MRs) and the SINR
distribution is not sensitive to the GR topology. This is expected because the overall
protocol performance largely depends on the neighborhood topology of MRs which is
not affected by the GR topology. The GR topology only determines the set of MRs
that initiate the protocol during the initialization phase described in Section 3.8.

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 54
0 20 40 60 80 1000
50
100
150
200
250
300
350SLOT DISTRIBUTION AMONG MESH ROUTERS
CONTROL SLOT INDEX
NU
MB
ER
OF
ME
SH
RO
UT
ER
S
no PC, shadow = 4 dBwith PC, shadow = 4 dB
(a)
0 10 20 30 40 500
0.01
0.02
0.03
0.04
0.05
0.06SINR DISTRIBUTION OF NEIGHBOR LINKS
SINR (dB)
FR
AC
TIO
N O
F L
INK
S
no PC, shadow = 4 dBwith PC, shadow = 4 dB
(b)
Figure 3.7: (a) The number of mesh routers that acquired a specific control time slotvs. control time slot index and (b) the distribution of SINR over links between twoneighbor mesh routers, both for with and without the power control of receive busytones. In all cases, we set αT = αR = 1 dB.

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 55
0 20 40 60 80 1000
50
100
150
200
250
300
350SLOT DISTRIBUTION AMONG MESH ROUTERS
CONTROL SLOT INDEX
NU
MB
ER
OF
ME
SH
RO
UT
ER
S
(#MRs):(#GRs) = 10:1(#MRs):(#GRs) = 20:1(#MRs):(#GRs) = 40:1(#MRs):(#GRs) = 80:1
(a)
0 10 20 30 40 50 600
0.01
0.02
0.03
0.04
0.05
0.06SINR DISTRIBUTION OF NEIGHBOR LINKS
SINR (dB)
FR
AC
TIO
N O
F L
INK
S
(#MRs):(#GRs) = 10:1(#MRs):(#GRs) = 20:1(#MRs):(#GRs) = 40:1(#MRs):(#GRs) = 80:1
(b)
Figure 3.8: (a) The number of mesh routers that acquired a specific control time slotvs. control time slot index and (b) the distribution of SINR over links between twoneighbor mesh routers, both for different GR topologies. In all cases, we set αT = αR= 1 dB, and the power control of receive busy tones is employed.

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 56
3.10.5 Effect of NACK Transmission Conditions
When region R3 in Fig. 3.2 is included into the conditions for transmitting NACK
packets as mentioned in Section 3.3.4, more NACK packets are transmitted in the
network. This is because when (PA, PB) ∈ R3 in the example in Fig. 3.2, the receive
MR would now transmit a NACK packet which would not have been transmitted if
region R3 had not been included. With more NACK packets transmitted, a MR that
has already acquired a control time slot is more likely to falsely decide that one of
its neighbor links has degraded and thus release the acquired control time slot. We
observed that the first few control time slots were degraded and released particularly
heavily at the beginning of the simulation, when many MRs all at the same time
discover the network and start contending.
When the power control scheme was not employed, the overall protocol perfor-
mance was yet almost identical whether region R3 was included or not. On the other
hand, with the power control scheme employed, the first few control time slots were
contended so heavily that the number of MRs that acquired these control time slots
were lower than in the case without region R3 included, resulting in the dip over the
first few control time slots in Fig. 3.7-(a) as noted earlier in Section 3.10.3. However,
the number of control time slots required and the resultant distribution of the average
received SINR remained almost the same. In all cases, the protocol converged more
slowly when region R3 was included.
3.11 Chapter Summary
In this chapter, we proposed a control time slot assignment protocol through which
every MR in the WMN acquires a broadcast time slot that supports a minimum
average received SINR from the MR to all of its neighbor MRs. The protocol was
designed to work even with the radio propagation models that include the random
shadowing process as well as the deterministic path-loss; and with the cumulative
interference calculation model, both of which are often oversimplified in the literature.
The protocol operates in a fully distributed manner.

CHAPTER 3. CONTROL TIME SLOT ASSIGNMENT PROTOCOL 57
The basic mechanisms of the protocol and the full operations were illustrated.
Selection criteria of the protocol parameters were also given. Furthermore, a power
control scheme was introduced that allows better utilization of resources for maintain-
ing control time slots. Other design considerations of the protocol including protocol
initialization, deadlock resolution, and NACK transmission were discussed. Extensive
simulation results were presented and discussed: the protocol was shown to support
the target minimum average received SINR over all neighbor pairs of MRs in all
simulated scenarios. In addition, the sensitivities of the protocol to the standard
deviation of log-normal shadowing of the radio propagation and to the GR topology
were determined. The benefit of the power control scheme was also demonstrated.

Chapter 4
Data Time Slot Access Control
Protocol
4.1 Introduction
As described in Section 2.3, the WMN studied in this thesis utilizes two types of time
slots: control time slots and data time slots. Control time slots provide a means for
MRs to exchange control messages among themselves for such operations as network
discovery, routing table construction, and resource negotiation. Control time slots also
allow EUs to discover the network and to request and negotiate resources with their
associated MRs. Over data time slots, on the other hand, user data are transmitted.
In this chapter, we develop a protocol that controls the medium access over data
time slots. The protocol utilizes control time slots that are assigned among MRs
through the control time slot assignment protocol developed in Chapter 3. The data
time slot access control protocol is fully cooperative and distributed: network entities
negotiate among themselves for resource allocation, and the messages are exchanged
only among one-hop neighbor MRs or between an EU and its associated MR. Further-
more, the protocol supports adaptive resource allocation through dynamic allocation
of data time slots and PHY transmission modes over the slots as well as through
user/queue prioritization. As part of the data time slot access control protocol, we
introduce a new admission and congestion control (ACC) policy that incorporates the
58

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 59
resource availability at the routers along the path to the destination router, and yet
utilizes only local information available at the admitting router and has a minimal
increase in control overhead.
This chapter is organized as follows. It first illustrates the resource negotiation
mechanisms provided by the protocol. Key elements of the protocol for dynamic
and effective resource allocation are then discussed including data time slot selection,
queue/session prioritization, data transmission/retransmission, and resource release.
The routing protocol employed by the WMN is then described including its opera-
tions and routing metrics. Two ACC policies, one denoted as AC RO and considered
in [36] and in Section 4.8.3 and the other denoted as AC RF and considered in [37]
and in Section 4.8.4, are then presented including their stability properties. Finally,
extensive simulation results are presented and discussed. Several fundamental perfor-
mance metrics are examined including the network throughput, average per-session
throughput and blocking and dropping rates. The impact of the two ACC schemes on
the network performance are compared and discussed. Particularly, AC RF is shown
to stabilize the network even under heavy traffic loads unlike AC RO .
4.2 Resource Negotiation
To transfer user data over data time slots, network entities (MRs and EUs) exchange
resource negotiation requests over control time slots. The data time slot access control
protocol developed in this thesis provides mechanisms that support such resource
negotiation and allocation in a fully cooperative and distributed fashion. The frame
structure is repeated in Fig. 4.1.
There are two types of negotiation among network entities. One is between an EU
and its associated MR, and the other is among one-hop neighbor MRs. In the former,
a new EU’s admission request is controlled, and in the latter, a resource request by a
neighbor MR is controlled.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 60
tBUSY rBUSY tBUSY/RTS NACK RA
CTRL SLOTDATA SLOT
... ... ...FRAME 0 FRAME 1
DATA_TXDATA_ACK
Figure 4.1: The network frame structure: time is slotted into control and data timeslots and each time slot comprises multiple subslots.
4.2.1 Between EU and MR
When an EU tries to access the network, it first selects a MR to associate with
(see Section 4.8.2 for the MR section criterion). Once the EU determines a MR,
it transmits an admission request packet over the MR’s random access subslot (RA
in Fig. 4.1). If the request packet is received successfully at the MR and the MR
decides to admit the request according to its employed ACC policy, the MR assigns
to the EU data time slots on subsequent frames and the PHY transmission modes
over the slots. See Section 4.3 for how a MR selects data time slots and Section 4.2.2
for how it determines the PHY transmission modes over the data time slots. Each
data time slot is associated with only one EU at any time instance. If the request
packet is not received successfully due to collision with other request packets for the
same MR or due to accumulated interference from far EUs, the EU will back off and
retry at a later time. The EU will also back off and retry when it is notified that
the request is not accepted due to insufficient resources available. The EU is blocked
after a maximum number of unsuccessful retries. A maximum of 2 additional retries
(a total of 3 transmissions) are allowed in the simulations presented in this thesis.
See Section 4.8 for more discussion on the admission control of EUs.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 61
4.2.2 Among One-Hop Neighbor MRs
The resource negotiation among one-hop neighbor MRs is performed on the control
time slots of the involved MRs and involves a three-way handshake: compiling and
transmitting requests by a requesting MR, allocating data time slots and PHY trans-
mission modes for reception by a requested MR, and finally, confirming the assignment
by the requesting MR. Operations performed during each phase of the handshake are
explained in the following.
Compiling Requests
During its control time slot, a MR compiles a list of data time slot requests for serving
sessions in its queues. A MR allocates a separate queue for each EU. For each EU, a
MR requests resources for serving the following amount of data:
max
min
q −∑i
dtx,i, (Nmr −∑j
Itx,j) dmax
, 0
(4.1)
where q is the current queue size, dtx,i is the data size currently being transmitted on
data time slot i per frame for the EU, Itx,j is 1 when data time slot j is being used
for transmission for this EU and 0 otherwise, Nmr is the maximum number of data
time slots allowed for transmission for each EU at a MR, set to 10 in the simulations
presented in this thesis, and dmax is the data size transmittable over one data time
slot per frame using the highest-rate PHY transmission mode, set to 6,412 bytes in
the simulations presented in this thesis (using 54 Mbps in Table 2.3 and DATA TX
= 0.95 msec in Fig. 4.1).
With the resources corresponding to the first argument of the minimum operator
in Eqn. (4.1), the queue would be emptied during the next frame if no additional
data arrive (assuming no transmission errors). If additional data arrive, the requested
amount will be adjusted according to Eqn. (4.1) such that the queue would be emptied
during the subsequent frame. The second argument of the minimum operator in
Eqn. (4.1) puts an upper limit on the number of data time slots assigned to each EU
for transmission.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 62
A requesting MR also constructs and transmits a list of data time slot indices
whose received interference level on DATA ACK is below a threshold, TH ACK,
indicating that the MR can transmit only on those data time slots without causing
excessive interference on active transmissions around itself. The list of usable data
time slot indices is then transmitted along with each resource request to the best
neighbor MR toward the requested session’s destination that is determined by the
routing protocol described in Section 4.7.
Processing Requests
Once a MR receives the lists of data time slot requests and usable data time slot
indices, it prioritizes requests according to the queue/session prioritization policy dis-
cussed in Section 4.4. Starting from the request with the highest priority, a data time
slot is assigned if and only if the data time slot is usable at the requesting MR, idle at
the requested MR, its received interference level on DATA TX at the requested MR is
below a threshold, TH TX, and finally, the data time slot can support the minimum
PHY transmission mode. The PHY transmission mode on a data time slot is calcu-
lated based on the received signal strength from the requesting MR at the requested
MR and the interference level on DATA TX received during the previous frame at
the requested MR. The highest PHY transmission mode that can be supported by
the estimated SINR is assigned to the allocated data time slot. The total number
of data time slots allocated to one session is limited to a maximum number, set to
10 in this thesis. Note that unlike control time slots that are statically associated
with MRs until the network topology changes, data time slots are dynamically dis-
tributed among network entities according to the varying traffic demand and resource
usage status. When there are multiple available data time slots, one is chosen by the
data time slot selection algorithm described in Section 4.3. Results of the processed
resource requests are transmitted back during the requested MR’s control time slot.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 63
Confirming Requests
During its control time slot, a MR sorts the received resource request results according
to the queue/session prioritization policy discussed in Section 4.4. Starting from the
request with the highest priority, each of its assigned data time slots is examined to
determine whether the data time slot is still usable at the MR. A data time slot may
have become unusable due to an increased interference level on the data time slot
during the previous frame, or may have been assigned by the same MR to another
request with a higher priority during the same control time slot. If a data time
slot cannot be assigned as indicated in its resource request result, the MR notifies
the corresponding neighbor MR of the failed allocation so that the data time slot is
immediately released at the neighbor MR for another session. The failure notification
is transmitted during the MR’s control time slot. On the other hand, if a data time
slot is successfully assigned, no explicit acknowledgment is transmitted. Once a data
time slot is assigned to a session, the data time slot is used for the same session until
the MR completes transmitting the session data or gives up transmission on the data
time slot after a maximum number of retransmissions without success for the session.
4.3 Data Time Slot Selection
When a MR selects a usable data time slot among multiple available ones for reception
during the second phase of the resource negotiation handshake in Section 4.2.2, the
MR can employ different strategies. It is known [38] that for a given path and current
usage of data time slots along the path, calculating the set of new data time slots
that maximizes the throughput along the path is NP-complete. Thus, we consider
heuristic approaches to choosing data time slots. One strategy is to take the available
data time slot with the lowest received interference level on DATA TX, denoted as
lowest-interference-first (LIF-S) in this thesis, and another is to select the available
one with the lowest slot index [32], denoted as earliest-index-first (EIF-S) in this
thesis. In Section 4.9, we compare the protocol performance under the LIF-S and
EIF-S policies.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 64
4.4 Queue/Session Prioritization
When a MR allocates resources among multiple requests from its one-hop neighbor
MRs, the MR employs a scheme to prioritize the requests. The prioritization is made
locally at the MR. One policy is to prefer the session with the earliest admission time,
a form of first-come-first-served policy, in an attempt to minimize the session delay.
Another approach is to give the session with the longest queue the highest priority.
A MR can also jointly optimize the prioritization with the data time slot selection
policy in Section 4.3. In this thesis, a first-come-first-served policy is adopted with
respect to the network admission time of the EU. That is, an EU who is admitted
to the network earlier receives a higher priority. Once priorities are determined, a
MR allocates as many resources as possible to the EU with the highest priority up to
the amount requested. If there are any remaining resources, the MR then allocates
the remaining resources to the EU with the second highest priority up to the amount
requested, and so on.
4.5 Data Transmission/Retransmission
The transmission result of a data packet is determined based on the average received
SINR at the receive node. If the average received SINR exceeds the threshold for
the associated PHY transmission mode of the packet, the transmission is declared
successful and the receive node transmits an ACK packet to the transmit node. Note
that one ACK packet suffices for all the data packets received during one data time
slot because packets transmitted over one data time slot experience the same level of
co-channel interference as MRs allocate resources by data time slots.
There are two cases in which a transmit node does not receive an ACK packet
from its intended receive node. The first case is when a data packet is not received
successfully at the intended receive node due to the average received SINR falling
below a threshold. In the second case, although a transmission is successful and the
receive node transmits an ACK packet, the ACK packet is not received successfully at
the intended transmit node due to high interference resulting from other ACK packets

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 65
transmitted over the same data subslot DATA ACK. In either case, the transmit
node does not receive an ACK packet and it retransmits data packets as follows: if a
maximum number of consecutive retransmissions, set to 2 (a total of 3 transmissions)
in this thesis, had been tried, the transmit node releases the data time slot. If not, the
next lower-rate PHY transmission mode is tried. If the lowest-rate PHY transmission
mode was previously tried on the data time slot, the same PHY transmission mode
is retried. Power control is not considered for data packets in this thesis.
4.6 Resource Release
Resource release is requested either on a random access subslot (RA in Fig. 4.1) by
EUs, or on a control time slot (tBUSY in Fig. 4.1) by neighbor MRs. When an
EU completes transmitting its data to its associated MR, the EU transmits a short
notification packet during the MR’s random access subslot (RA). If the packet is
successfully received, the MR releases the data time slots allocated for receiving data
from the EU and transmits an ACK packet to the EU. Otherwise, the EU backs off
and retransmits the notification packet until it succeeds. When it succeeds, the EU
leaves the network. On the other hand, when an EU runs out of data time slots
before it completes transmitting its data, the EU drops its session and sends a drop
notice to its associated MR. Upon receiving the notice, the MR releases resources for
the EU and forwards the notice to the neighbor MR toward the session’s destination
if resources were allocated at the neighbor MR. Once an EU completely transfers its
session data to its associated MR, the session data are not dropped afterwards, i.e.,
the data are kept in the network until they are delivered to the destination node. The
session lifetime is assumed to be sufficiently large so that no session is dropped due
to expired lifetime.
When the session data of an EU are completely transferred from one MR to
another, the transmit MR releases its resources for the session and notifies the receive
MR of the completion over its control time slot. The receive MR then releases the
data time slots allocated for receiving for the session from the transmit MR.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 66
4.7 Routing Protocol
4.7.1 Overview
The WMN simulator developed in this thesis implements a proactive routing protocol
that is based on minimum-cost spanning trees, similar to the hybrid wireless mesh
protocol (HWMP) with mesh portals of the IEEE 802.11s standards [39,40]. MRs co-
located with GRs periodically generate and propagate announcements (ANNs) and
other MRs generate and transmit replies (ANN REPs) in response to the best ANN
received. ANN REPs passing through intermediate MRs form spanning trees with
MRs co-located with GRs at roots. All ANNs and ANN REPs are transmitted on
control time slots of involved MRs. As explained in Section 2.3, routing tables are
constructed at the beginning of each simulation run and remain the same throughout
the run. This is because the network topology does not change during each run and
neither does each of the routing metrics considered in Section 4.7.4 in this thesis.
In an actual network, the routing tables would be periodically updated as network
conditions changed.
4.7.2 Processing and Forwarding Announcements
Each ANN is tagged with the source MR ID, the arrival time, the neighbor MR from
which the ANN was received, and time-to-live (TTL) in hops. The maximum TTL
in hops, MAX TTL, varies according to the average number of MRs served by one
GR in the network, and MAX TTL is set to 6 for the ratio of (#MRs):(#GRs) =
40:1. For a larger ratio, MAX TTL is set to be larger. Upon receiving an ANN, a
MR compares it with the best ANN received thus far from the same source MR, and
keeps the one with the better routing metric. If the new ANN has the smaller cost,
it is forwarded to the one-hop neighbor MRs.
4.7.3 Generating and Forwarding Replies to Announcements
After a MR receives the first ANN, it waits for a certain period of time, initially
set to MAX TTL frames, and then determines the ANN with the smallest routing

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 67
cost. The MR then constructs a reply message (ANN REP), and transmits it to the
neighbor MR from which the best ANN was received.
4.7.4 Routing Metrics
Effective link and path metrics may vary depending on the traffic type as different
traffic types have different quality-of-service (QoS) requirements. Two link metrics are
investigated in this thesis for the best-effort web traffic type described in Section 2.6:
one link metric is a constant, and the other link metric is the PHY transmission time
(or air-time) per unit data size under the idealized scenario in which the interference
level across the network is uniform and is such that a neighbor link with the received
signal power of PTH NBR barely supports the minimum PHY transmission mode.
The path or routing metric is defined to be the sum of the link metrics along the
path. Under the former link metric, the path or routing metric becomes the number
of hops along the path, and a MR selects the shortest path toward the destination
node. Under the latter metric, the path or routing metric becomes the sum of the
air-times along the path under the aforementioned idealized scenario. Either of the
metrics does not include the processing delay and the medium access acquisition delay
at intermediate MRs. The former metric is denoted as ‘min hop’, and the latter as
‘min air-time’ in this thesis.
Consider the example in Fig. 4.2 for illustration of the two different routing met-
rics, in which the received signal power over the link A→ B, PA→B, and that over the
link A→ C, PA→C , are different. In the scenario, MR A tries to determine the best
neighbor MR for forwarding the user data toward the best destination MR co-located
with a GR (MR D in the figure). Under ‘min hop’ routing metric, both neighbors
(MR B and MR C) have the same link metric of 1 (and the same routing metric of
2). Under ‘min air-time’, on the other hand, the link metrics for links A → B and
A → C may differ. The idealized interference scenario mentioned above says that
for a link T → R with PT→R = PTH NBR, the supportable PHY transmission rate,

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 68
Figure 4.2: Example for illustrating the two different routing metrics. PA→B 6= PA→C .
phyT→R, is assumed to be the minimum PHY transmission rate, phymin. That is,
phyT→R = f(SINRT→R) = f(PT→RIR +N
) = f(PTH NBR
IU +N) = phymin
where f(·) denotes a functional relationship, SINRT→R is the average received SINR
at the receive MR R from the transmit MR T , IR is the average received co-channel
interference level at the receive MR R, IU is the average received co-channel inter-
ference level at a receive MR that barely supports phymin with the average received
signal power level of PTH NBR, and N is the receiver thermal noise power. In other
words, under the idealized interference scenario, the interference level is assumed to
be
IU =PTH NBR
f−1(phymin)−N (4.2)
For phymin = 6 Mbps and its corresponding SINR threshold of 12 dB given in Ta-
ble 2.3, and PTH NBR = -50 dBm as discussed in Section 3.5.1, and N = -98 dBm
given in Table 2.2, we have IU ≈ -62 dBm.
Then, the link metric under ‘min air-time’ for link A→ B, ATA→B, in Fig. 4.2 is

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 69
given by
ATA→B =1
phyA→B
where
phyA→B = f(SINRA→B)
= f(PA→BIB +N
)
= f(PTH NBR + P∆(A→B)
IU +N)
≥ phymin
where IU is as given in Eqn. (4.2). The link metric for link A→ C, ATA→C , in Fig. 4.2
is similarly given. If P∆(A→B) ≥ P∆(A→C) and other conditions are the same, then
MR B is chosen as the best neighbor of MR A. Although this idealized interference
scenario does not occur in the simulated networks, the routing metric ‘min air-time’
does take into account the difference in the received signal power level for a neighbor
MR pair unlike the routing metric ‘min hop’.
Fig. 4.3 shows the number of hops along paths from MRs to their best GRs under
the two link metrics in the case of (#MRs):(#GRs) = 40:1. The statistics were found
from the routing tables constructed during the pre-operation phase of a simulation run
under the simulated scenario. MRs with 0 hop correspond to those MRs co-located
with GRs. Overall, paths generated under the metric ‘min air-time’ are longer than
those under the metric ‘min hop’. This is because the neighbor links along a path
chosen under the metric ‘min air-time’ tend to have higher received signal power than
those along a path chosen under the metric ‘min hop’, and a neighbor link with a
higher received signal power tends to be shorter in distance. As a result, a path under
the metric ‘min air-time’ tends to be longer in the number of hops. The average path
lengths are 2.16 and 2.51 hops, respectively, for the case shown in Fig. 4.3.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 70
0 1 2 3 4 5 6 70
1000
2000
3000
4000
5000
6000
7000
PATH LENGTH (HOPS)
NU
MB
ER
OF
ME
SH
RO
UT
ER
S
DISTRIBUTION OF PATH LENGTH
min_hopmin_air−time
Figure 4.3: Distribution of the number of hops under two different link metrics con-sidered in this thesis. (#MRs):(#GRs) = 40:1
4.8 Admission and Congestion Control
4.8.1 Introduction
A crucial component of the data time slot access control protocol is admission and
congestion control (ACC). When admitting new users, it is critical to consider the
current resource usage of existing users. If the network admits more users than it can
support, the quality-of-service (QoS) as measured by delay or throughput of existing
users may degrade to an unacceptable level. For multi-hop networks, it is more
challenging to assess the resource usage of existing users because one has to examine
resources beyond the first hop, i.e., beyond the admitting router.
Various forms of admission control have been considered for multi-hop wireless
networks. Many MAC schemes that involve contention in medium acquisition [13–16]
incorporate admission control into the contention process by admitting only those

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 71
nodes that successfully acquire the medium. These schemes usually examine the
medium availability only for the first hop but not beyond it. Our work presented
in [36] and in Section 4.8.3 below takes a similar approach: a new user is admitted
based on whether resources are available for reception over the first hop between
the user and the admitting router. Although these schemes based on the resource
availability for the first hop may be simple and even work well under light traffic
loads, they fail to serve the admitted users under heavy traffic loads.
Another approach [38,41] explicitly probes the resource availability at each router
along the way to the destination node before admitting a new traffic request. The
network admits a new traffic request only if a resource is available at the time of
probe. Although this approach enables the network to detect congestion sooner, it
increases the setup delay before a new user is admitted. Another drawback is that
exchanging probe messages incurs excessive control overhead.
As part of the data time slot access control protocol, we introduce a new ACC
policy in [37] and in Section 4.8.4 that incorporates the resource availability at the
routers along the path to the destination router, and yet utilizes only local information
available at the admitting router and has a minimal increase in control overhead.
Through analysis and simulations, the scheme is shown to stabilize the network under
high traffic loads unlike our earlier scheme in [36] and in Section 4.8.3.
4.8.2 Framework
As briefly explained in Section 4.2.1, when an EU arrives in the network, it first listens
to beacon signals transmitted by nearby MRs to select a “best” MR to associate with.
In this thesis, the MR with the strongest received signal power at the EU is selected.
Once an EU determines a best MR, it transmits an admission request packet over the
random access control subslot (RA in Fig. 4.1) of the MR. The EU also indicates the
data size it wishes to transmit and the list of usable data time slot indices that have
the received interference level on DATA ACK below a threshold, TH ACK, during
the previous frame. If the request packet is received successfully at the MR, the MR
transmits an ACK packet to the EU, listing the available data time slot indices and

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 72
supportable PHY transmission modes over them. A particular PHY transmission
mode is selected from the set of PHY transmission modes given in Table 2.3 based
on the received signal strength from the EU at the MR and the received interference
level on DATA TX at the MR during the previous frame. Each EU is limited to a
total of 10 data time slots to limit cases where one EU with a very large data volume
would occupy all of the resources around the EU. If the request packet is not received
successfully due to collision with other request packets for the same MR or due to
accumulated interference from far EUs, the EU will back off and retry at a later time
for the same MR up to a maximum number of trials, set to 3 in this thesis. The EU
will also back off and retry when it is notified that no resource is available for the EU.
The EU is blocked after a maximum number of unsuccessful retries. In the following,
we explain the two ACC schemes considered in this thesis.
4.8.3 AC RO (Reception Only)
The ACC scheme denoted as AC RO in this thesis is stated as follows [36]: a MR
admits an admission request if and only if the MR has resources available for receiving
data for the request. Note that under this scheme, many of the MRs, particularly, the
peripheral ones with respect to GRs, may continue to admit new EUs even when they
cannot acquire enough resources under high traffic loads to forward the received data
toward their neighbor MRs. As a result, the number of active queues with ‘insufficient’
resources (Ni in Eqn. (4.5)), may keep increasing without bound in a highly congested
condition. See Section 4.8.4 below for the definition of ‘(in)sufficiency’ of resources
for a queue. We will examine later in Section 4.9 how this stability property of the
policy affects the network performance.
4.8.4 AC RF (Reception Forwarding)
We first introduce a definition. A queue is said to have been allocated sufficient
resources when the queue has been allocated resources as requested in Eqn. (4.1),

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 73
i.e., if and only if the following condition is satisfied:
min
q −∑i
dtx,i, (Nmr −∑j
Itx,j) dmax
≤ 0 (4.3)
or equivalently, ∑i
dtx,i ≥ q or∑j
Itx,j ≥ Nmr (4.4)
where q, dtx,i, Itx,j, and Nmr are as defined for Eqn. (4.1). Each queue contains a
flag that indicates this sufficiency information. The flag is set to ‘unknown’ when a
queue is created. It is then updated immediately after a resource request is made for
this queue and the result is known. If the requested neighbor MR has not assigned
enough resources for the request, the requesting MR sets the flag to ‘insufficient’, and
otherwise, to ‘sufficient’.
The ACC policy denoted as AC RF in this thesis is then stated as follows: a MR
admits an admission request if and only if 1) each of the queues at the MR has been
assigned ‘sufficient’ resources, and 2) the MR has additional resources for receiving
data for the request. Note that the decision can be made locally at the admitting
MR, and thus, the policy is implemented in a fully distributed manner.
4.8.5 Stability Properties of AC RF
We now show that the ACC policy AC RF can stabilize the network under any offered
traffic to the network. Here, we assume a uniform stochastic arrival process across
the network. We call the WMN stable if and only if the number of active EUs or the
number of active queues in the network remains bounded. We assume the case in
which the limit on the number of queues and the limit on the queue size at each MR
are large enough so that they do not restrict the network throughput.
We prove the stability by showing that the number of active queues at each MR,
Nq, is bounded. Consider
Nq = Ns +Ni +Nu (4.5)
where Ns is the number of active queues at a MR with ‘sufficient’ resources, Ni is the

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 74
number of active queues with ‘insufficient’ resources, and Nu is the number of queues
that have been just created and have the sufficiency flag set to ‘unknown’ .
Ns is bounded because the number of active queues allocated with transmit data
time slots at a MR is limited due to the finite and fixed number of data time slots
of the network. The fact that Ni and Nu are bounded is explained as follows. When
the network starts operations, Ni = 0 and Nu = 0 at a MR, and the MR starts
receiving new resource requests. The maximum number of such requests received
over one frame, Nu,max, is bounded due to the finite and fixed number of data time
slots of the network. Because it takes up to two frames before a MR determines the
sufficiency information of a queue for a newly admitted request, Nu can grow up to
2Nu,max while Ni = 0. If Ni still remains zero after the sufficiency information is
determined for those queues admitted during the first frame, the MR can admit new
requests and Nu could grow up to 2Nu,max. On the other hand, if we have Ni > 0
(note here that Ni ≤ Nu,max because it is only those queues admitted during the
first frame that just requested resources), no further resource request is considered
for admission at the MR, and Nu stops increasing. These Nu queues, that correspond
to those queues admitted during the second frame, will be set to either ‘sufficient’ or
‘insufficient’ during the following frame, resulting in Nu = 0. The MR continues to
deny additional resource requests until Ni diminishes to zero. In this situation, it is
guaranteed that Ni decreases to zero because, according to the queue prioritization
policy discussed in Section 4.4, each of the queues with ‘insufficient’ resources will
eventually have the highest priority among those queues requesting resources of the
common parent MR and will receive ‘sufficient’ resources. As soon as Ni becomes
zero, the MR starts admitting new resource requests and repeats the above process.
4.9 Simulation Results
In this section, we present the performance of the WMN that employs the data time
slot access control policy presented in this chapter along with the control time slot
assignment protocol in Chapter 3.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 75
4.9.1 Simulation Setup
The two ACC schemes discussed in Section 4.8, AC RO and AC RF, and the two
data time slot selection algorithms mentioned in Section 4.3, EIF S and LIF S, are
considered. While both of the data time slot selection algorithms are simulated under
AC RO, only LIF-S is simulated under AC RF. There are 70 control time slots and
70 data time slots in each frame. Each data slot and control slot is 1 msec long so one
frame is 140 msec long. DATA TX = 0.95 msec in Fig. 4.1. TH TX and TH ACK
are both set to -63 dBm. (#MRs):(#GRs) = 40:1.
The simulator employs the parallel-processing simulation technique presented in
Appendix A, and each data point is obtained from one long simulation run that takes
several days up to a week using 16 processors simultaneously. See Section 2.7 for more
details on the WMN simulator and its data acquisition and processing procedure.
4.9.2 Performance Metric
Various performance metrics are determined for each simulation scenario. Two pri-
mary metrics are mean network throughput and per-session throughput: the mean
network throughput is calculated as the aggregate size of successfully completed ses-
sions across the network per unit time, and the per-session throughput is calculated as
the session data size divided by the session delay for a successfully completed session.
The session delay is measured from the time a session is admitted to the network to
the time the destination MR of the session completely releases resources allocated to
the session. We also find the blocking rate which is the ratio of the number of blocked
sessions to the number of arrived sessions, and the dropping rate which is the ratio
of the number of dropped sessions to the number of admitted sessions. Recall from
Section 4.2.1 and Section 4.8.2 that an EU is blocked if its admission request is not
accepted after a maximum number of retires. On the other hand, an EU is dropped if
it runs out of data time slots before it completes transmitting its data to the network
as discussed in Section 4.6.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 76
4.9.3 Results under AC RO
Network Throughput
Fig. 4.4-(a) shows the mean network throughput under different simulated scenarios.
In all simulated scenarios, when the session arrival rate is small, the mean network
throughput increases almost linearly as a function of the session arrival rate, success-
fully serving most of the EUs arriving to the network. However, as the session arrival
rate keeps increasing, the mean network throughput starts to decrease. The decrease
can be explained as follows. As the arrival rate increases, the interference level across
the network also increases and the mean PHY transmission rate supportable on a
data time slot decreases as indicated in Fig. 4.5-(a). Consequently, the network uses
increasingly more data time slots. If the arrival rate keeps increasing, at some point,
all the data time slots become exhausted. At this point, the network must start
blocking new EUs. However, many of the MRs may still find resources available
for reception at themselves under AC RO. Those MRs continue to admit new EUs
and these admitted EUs incur additional interference to the network leading to even
lower PHY rates. The resultant aggregate data size transported by the network thus
decreases, leading to the decrease in the mean network throughput in Fig. 4.4-(a).
Per-Session Throughput
As seen in Fig. 4.4-(b), the mean per-session throughput decreases as the traffic arrival
rate increases although the corresponding mean network throughput increases. This
implies that, under a higher traffic arrival rate, each EU experiences a longer session
delay on average while more EUs are simultaneously served across the network. There
are two major factors to the longer session delay: one factor is the lower mean PHY
transmission rates on data time slots due to increased interference, and the other
factor is the longer delay in acquiring resources at MRs due to more EUs competing
for the same resources.
The mean per-session throughput does not exist for λ ≥ 0.1 as indicated in
Fig. 4.4-(b). This is because the network employing AC RO becomes unstable under
those arrival rates, i.e., the number of active EUs in the network keeps increasing and

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 77
0.04 0.06 0.08 0.1 0.12 0.14 0.16300
350
400
450
500
550
600
650
700
SESSION ARRIVAL RATE, λ (sessions/sec/mesh router)
ME
AN
NE
TW
OR
K T
HR
OU
GH
PU
T (
Mbp
s)
EIF−S, min_hopEIF−S, min_air−timeLIF−S, min_air−time
(a)
0.04 0.06 0.08 0.1 0.12 0.14 0.16
0.3
0.32
0.34
0.36
0.38
0.4
0.42
0.44
0.46
SESSION ARRIVAL RATE, λ (sessions/sec/mesh router)
ME
AN
PE
R−S
ES
SIO
N T
HR
OU
GH
PU
T (
Mbp
s)
EIF−S, min_hopEIF−S, min_air−timeLIF−S, min_air−time
(b)
Figure 4.4: (a) Mean network throughput vs. session arrival rate; (b) mean per-session throughput for successfully completed sessions vs. session arrival rate. Bothunder AC RO and (#MRs):(#GRs) = 40:1

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 78
the session delay also keeps increasing as the system evolves over time. As a result, the
session delay becomes non-stationry and thus does not have a time-invariant mean
value. The network employing AC RO thus cannot guarantee a stable per-session
throughput under modest or heavy traffic loads.
Blocking and Dropping Rates
The blocking rate, not shown here, is found negligible in all the three simulated sce-
narios for arrival rates λ = 0.05 - 0.075. The dropping rate shown in Fig. 4.5-(b)
is overall small, and increases as the traffic arrival rate increases. Recall from Sec-
tion 4.6 that an EU releases a data time slot after a maximum number of unsuccessful
retransmissions on the slot, and becomes dropped if it runs out of data time slots.
The consecutive transmission failures on a data time slot are primarily due to new
transmissions that were not seen when the data time slot was assigned to this new
EU. When the network is lightly loaded, the dropping rate increases with the increas-
ing arrival rate because there are more new transmissions on a data time slot when
more new EUs are admitted. However, we expect that the dropping rate would stop
increasing with the increasing arrival rate once the network becomes saturated. See
Section 4.9.4 and Section 5.2.4 for more results and discussions on the behavior of
the dropping rate under the ACC scheme AC RF and various network topologies and
traffic loads.
Effect of Data Time Slot Selection Strategy
As shown in Fig. 4.4 and Fig. 4.5, under light or modest traffic loads, i.e., under
λ = 0.05 - 0.075, the system performs noticeably better under LIF-S than under
EIF-S in terms of mean network throughput, per-session throughput and dropping.
This outperformance can be explained with the much higher PHY transmission rates
under LIF-S as seen in Fig. 4.5-(a). Recall from Section 4.3 that EIF-S selects the
available data time slot with the earliest slot index while LIF-S chooses the available
data time slot with the lowest interference level. When the traffic load is light or
modest such that not all the data time slots are utilized under EIF-S, data time

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 79
0.04 0.06 0.08 0.1 0.12 0.14 0.1610
15
20
25
30
35
40
45
50
55
SESSION ARRIVAL RATE, λ (sessions/sec/mesh router)
ME
AN
PH
Y R
AT
E (
Mbp
s)
EIF−S, min_hopEIF−S, min_air−timeLIF−S, min_air−time
(a)
0.04 0.06 0.08 0.1 0.12 0.14 0.160.5
1
1.5
2
2.5
3
3.5
4
4.5
5
SESSION ARRIVAL RATE, λ (sessions/sec/mesh router)
DR
OP
PIN
G R
AT
E (
%)
EIF−S, min_hopEIF−S, min_air−timeLIF−S, min_air−time
(b)
Figure 4.5: (a) Mean PHY transmission rate of successfully received data packetsamong MRs vs. session arrival rate; (b) dropping rate vs. session arrival rate. Bothunder AC RO and (#MRs):(#GRs) = 40:1

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 80
slots used under EIF-S tend to experience higher interference on average compared
to those under LIF-S. This is because the traffic load is distributed among data time
slots more evenly under LIF-S compared to EIF-S and thus each data time slot can
support higher PHY transmission rates on average under LIF-S, leading to better
overall performance.
The performance difference between LIF-S and EIF-S becomes smaller as the traf-
fic load becomes heavier, and the mean network throughput even becomes lower at
λ = 0.15. This trend can be partly explained by the decreased gap in the mean
PHY transmission rates between the two strategies as seen in Fig. 4.5-(a). As the
network becomes increasingly congested, the interference level across the network be-
comes higher and increasingly more time slots become utilized and as a result, all the
data time slots experience a similar level of interference. The higher mean network
throughput under EIF-S implies that utilizing data time slots with the earliest index
may lead to better reuse of data time slots than utilizing data time slots with the
lowest interference level. In fact, this better utilization of resources under EIF-S than
under LIF-S is consistent with the results in [25,26] in which EIF-S (or Autonomous
Reuse Partitioning in [25, 26]) performs better than LIF-S (or Least Interference Al-
gorithm in [25, 26]) when the algorithms are used as dynamic channel assignment
schemes in a mobile cellular network serving circuit-switched voice traffics.
Effect of Routing Metric
As seen in Fig. 4.4-(a), between the two routing metrics under EIF-S, the difference in
the mean network throughput is insignificant when the traffic load is light or modest,
e.g., λ = 0.05 - 0.075. This results from the fact that most of the EUs arriving
to the network successfully receive the service under such traffic loads. In fact, as
mentioned earlier, the blocking rate is negligible in all the three simulated scenarios,
and the dropping rate shown in 4.5-(b) is also small in either case over λ = 0.05 -
0.075.
The per-session throughput seen in Fig. 4.4-(b), however, is noticeably higher un-
der ‘min hop’ under light traffic loads, e.g., λ = 0.05. This implies that although PHY
transmission rates are higher on average with ‘min air-time’ as shown in Fig. 4.5-(a),

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 81
the PHY transmission rates in both routing scenarios are high enough that the delay
in transmitting data packets is comparable to the delay in acquiring data time slots
through the resource negotiation handshake described in Section 4.2. On the other
hand, when the traffic load becomes modest, e.g., λ = 0.075, the PHY transmission
rates decrease on average due to higher interference across the network, and the de-
lay in transmitting data packets increases and tends to dominate the session delay.
As a result, under ‘min air-time’, the mean session delay, not shown here, becomes
shorter and the per-session throughput seen in Fig. 4.4-(b) becomes higher compared
to ‘min hop’.
Session Fairness
In Fig. 4.6, we present the mean per-session throughput for successfully completed
sessions versus the path length in hops that is measured from each session’s associated
MR to the session’s destination MR co-located with a GR. Note that the per-session
throughput greatly varies among sessions with different path lengths. On average,
sessions with 0 hops, i.e., sessions directly transmitted to MRs co-located with GRs
have the mean per-session throughput 3.5 times higher than those with 4 hops. This
unfairness among sessions at different geographic locations with respect to GRs is
one of the important issues for multi-hop wireless networks. Addressing the issue is,
however, beyond the scope of this thesis.
Instability of AC RO Revisited
The network behavior under overloads suggests that AC RO which does not consider
the resource availability beyond the admitting MR tends to admit more sessions
than the network can support. Several extensions can be pursued. One approach is
to incorporate the resource availability at relaying MRs along the path toward the
session’s destination before admitting a session. It would then increase the setup time
before a session is admitted to the network as discussed in Section 4.8.1. Another
approach is to drop sessions at relaying MRs even after EUs completely transfer their
session data to their associated MRs. In the latter approach, an additional mechanism

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 82
0 0.5 1 1.5 2 2.5 3 3.5 40.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
PATH LENGTH (HOPS)
ME
AN
PE
R−S
ES
SIO
N T
HR
OU
GH
PU
T (
Mbp
s)
EIF−S, min_hop, λ = 0.05EIF−S, min_air−time, λ = 0.05LIF−S, min_air−time, λ = 0.05EIF−S, min_hop, λ = 0.075EIF−S, min_air−time, λ = 0.075LIF−S, min_air−time, λ = 0.075
Figure 4.6: Mean per-session throughput for successfully completed sessions vs. pathlengths (hops) under AC RO and (#MRs):(#GRs) = 40:1
would be needed by which a failure or a dropping at a relaying MR is notified back
to the EU. The mechanism would then need to deal with the situation in which such
an EU leaves the network before it receives such a failure notice. A better approach
is to use a better ACC as discussed in the next section.
4.9.4 Results under AC RF
In this section, we present the network performance under AC RF which incorporates
the resource availability at the MRs along the path to the destination MR, and yet
utilizes only local information available at the admitting MR and has a minimal
increase in control overhead compared to AC RO. We also compare the network
performance with that under AC RO presented in Section 4.9.3.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 83
0 0.05 0.1 0.15 0.2 0.25300
400
500
600
700
800
900
SESSION ARRIVAL RATE (sessions/sec/mesh router)
ME
AN
NE
TW
OR
K T
HR
OU
GH
PU
T (
Mbp
s)
EIF−S min_hop, AC_ROEIF−S min_air−time, AC_ROLIF−S min_air−time, AC_ROLIF−S min_air−time, AC_RFLIF−S min_hop, AC_RF
(a)
0 0.05 0.1 0.15 0.2 0.250
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
SESSION ARRIVAL RATE (sessions/sec/mesh router)
ME
AN
PE
R−S
ES
SIO
N T
HR
OU
GH
PU
T (
Mbp
s)
EIF−S min_hop, AC_ROEIF−S min_air−time, AC_ROLIF−S min_air−time, AC_ROLIF−S min_air−time, AC_RFLIF−S min_hop, AC_RF
(b)
Figure 4.7: (a) Mean network throughput for successfully completed sessions vs. ses-sion arrival rate; (b) mean per-session throughput for successfully completed sessionsvs. session arrival rate. Both are under (#MRs):(#GRs) = 40:1.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 84
Network Throughput
As seen in Fig. 4.7, when the traffic arrival rate is small, the network throughput
behaves quite similarly under both AC RO and AC RF: the network successfully
serves most of the EUs arriving to the network, resulting in the almost linear network
throughput in Fig. 4.7-(a) and insignificant blocking and dropping rates in Fig. 4.8-
(a) and (b). However, as the arrival rate increases, the network throughput shows a
remarkable difference: the network throughput starts to decrease under AC RO while
it continues to increase under AC RF.
Under AC RF, the network begins to block new EUs as the network starts to sat-
urate unlike AC RO. When the MRs near GRs start to become congested such that
some of their existing queues do not receive sufficient resources, the MRs stop accept-
ing admission requests. Then, their child MRs successively stop accepting admission
requests until their existing queues receive sufficient resources from these parent MRs,
and so on. As a result, the network reaches a balance in which the network admits
only as many EUs as it can support without destabilizing itself. As a result, as shown
in Fig. 4.7-(a), the network throughput still increases as the arrival rate keeps increas-
ing. However, the increment in the network throughput diminishes. This diminishing
increment results from the fact that the network becomes increasingly utilized and
the idling fraction of the network diminishes as the network becomes increasingly
loaded. Eventually, all the network resources would be exhausted, and the network
throughput would converge to a level called the network capacity.
We note that the difference resulting from the two different routing metrics is
insignificant compared to the difference from the two different ACC policies. This
somewhat small difference follows from the fact that the simulated WMN has rather
shallow spanning trees for routing. As mentioned in Section 4.7.4, the average path
length from MRs to their corresponding best GRs is 2.16 hops under ‘min hop’, and
2.51 hops under ‘min air-time’ with (#MRs):(#GRs) = 40:1. See Section 5.3 for
more results and discussions on the effect of the two routing metrics on the network
performance under different GR topologies.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 85
Per-Session Throughput
As seen in Fig. 4.7-(b), under AC RF, the mean per-session throughput decreases
as the traffic arrival rate increases similarly to AC RO. However, unlike AC RO, the
network remains stable under heavy traffic loads. The number of active EUs in the
network and the session delay remain stationary over time and consequently, the net-
work can guarantee a stable mean per-session throughput even under heavy traffic
loads. As shown in Fig. 4.7-(b), the decrement in the per-session throughput dimin-
ishes with the increasing traffic arrival rate. We expect that the mean per-session
throughput would converge to a constant as the network resources are increasingly
utilized with the increasing traffic arrival rate. See Section 5.2.2 for more results and
discussions on the behavior of the mean per-session throughput under various GR
topologies and traffic loads.
Blocking and Dropping Rates
The blocking rate increases with the increasing session arrival rate for AC RF as
seen in Fig. 4.8-(a). This follows from the fact that under a higher arrival rate, a
new EU arriving to the network sees more EUs, on average, being served at the
MR to associate with, and thus has a higher probability of being blocked. As the
network starts to saturate, the blocking rate starts to increase very sharply as seen
in Fig. 4.8-(a) because the number of EUs supportable by the network also starts to
saturate. The blocking rate would asymptotically converge to 100%. On the other
hand, the blocking rates for AC RO are found negligible in all the simulated scenarios
as indicated in Fig. 4.8-(a). See Section 5.2.3 for more results and discussions on the
behavior of the blocking rate under various GR topologies and traffic loads.
Similarly to AC RO, the dropping rate increases with the increasing arrival rate
when the network is lightly loaded as seen in Fig. 4.8-(b). However, we expect that the
dropping rate would stop increasing with the increasing arrival rate once the network
becomes heavily saturated. See Section 5.2.4 for more results and discussions on the
behavior of the dropping rate under various GR topologies and traffic loads. Note
that in Fig. 4.8-(b), the dropping rate is not shown for AC RO when the network

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 86
0 0.05 0.1 0.15 0.2 0.250
5
10
15
20
25
30
35
40
45
SESSION ARRIVAL RATE (sessions/sec/mesh router)
BLO
CK
ING
RA
TE
(%
)
EIF−S min_hop, AC_ROEIF−S min_air−time, AC_ROLIF−S min_air−time, AC_ROLIF−S min_air−time, AC_RFLIF−S min_hop, AC_RF
(a)
0 0.05 0.1 0.15 0.2 0.250
2
4
6
8
10
12
SESSION ARRIVAL RATE (sessions/sec/mesh router)
DR
OP
PIN
G R
AT
E (
%)
EIF−S min_hop, AC_ROEIF−S min_air−time, AC_ROLIF−S min_air−time, AC_ROLIF−S min_air−time, AC_RFLIF−S min_hop, AC_RF
(b)
Figure 4.8: (a) Blocking rate vs. session arrival rate; (b) dropping rate vs. sessionarrival rate. Both are under (#MRs):(#GRs) = 40:1.

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 87
0 0.05 0.1 0.15 0.2 0.2510
15
20
25
30
35
40
45
50
55
SESSION ARRIVAL RATE (sessions/sec/mesh router)
ME
AN
PH
Y R
AT
E (
Mbp
s)
EIF−S min_hop, AC_ROEIF−S min_air−time, AC_ROLIF−S min_air−time, AC_ROLIF−S min_air−time, AC_RFLIF−S min_hop, AC_RF
Figure 4.9: Mean PHY transmission rate of successfully received packets among MRs.(#MRs):(#GRs) = 40:1.
is heavily loaded because the network becomes unstable under a heavy traffic load
under AC RO and thus the dropping rate does not accurately reflect the network
performance.
PHY Transmission Rate
Similarly to AC RO, the mean PHY transmission rate of successfully transmitted
packets among MRs generally decreases with the increasing session arrival rate for
AC RF as shown in Fig. 4.9. This is due to the fact that at a higher arrival rate,
there are more EUs admitted in the network and the resultant interference level
becomes higher. However, the decrement diminishes and the mean PHY transmission
rate remains rather constant when the network becomes heavily saturated as seen
in Fig. 4.9. Note that the mean PHY transmission rate is higher under ‘min air-
time’ compared to that under ‘min hop’. This is partly due to the fact that the

CHAPTER 4. DATA TIME SLOT ACCESS CONTROL PROTOCOL 88
received signal strength over neighbor links under the former routing metric tends to
be noticeably higher (a few dB) than that under the latter metric.
4.10 Chapter Summary
In this chapter, we developed a protocol that controls the medium access over data
time slots for the WMN studied in this thesis. The protocol utilizes control time
slots and operates in a fully cooperative and distributed manner. Furthermore, the
protocol supports adaptive resource allocation through dynamic allocation of data
time slots and PHY transmission modes over the slots as well as through user/queue
prioritization. Particularly, we introduced an ACC scheme that stabilizes the network
under heavy traffic loads, and yet utilizes only local information available at the
admitting router and has a minimal increase in control overhead.
Resource negotiation mechanisms provided by the protocol were illustrated and
key elements of the protocol for dynamic and effective resource allocation were dis-
cussed including data time slot selection, queue/session prioritization, data trans-
mission/retransmission, and resource release. The routing protocol employed by
the WMN was also described including its operations and routing metrics. Two
ACC policies were then introduced and their stability properties were analyzed. Fi-
nally, extensive simulation results were presented and discussed. Several fundamental
performance metrics were examined including the network throughput, per-session
throughput and blocking and dropping rates. The impact of the two ACC schemes
on the network performance were compared and discussed. Particularly, AC RF was
shown to stabilize the network under heavy traffic loads whereas AC RO is unstable
under heavy traffic loads.

Chapter 5
Scalability
5.1 Introduction
In this chapter, we investigate the performance of the WMN with focus on the scala-
bility under different scenarios of network topology and routing metric. Specifically,
we vary the number and locations of GRs deployed in the network while holding the
locations and total number of MRs constant, and also consider two different routing
metrics. The WMN runs the control time slot assignment protocol in Chapter 3 and
the data time slot access control protocol in Chapter 4. The network employs the
data time slot selection algorithm LIF-S in Section 4.3 and the ACC scheme AC RF
in Section 4.8.4 for all simulations presented in this chapter.
We examine the scalability behavior of several fundamental performance metrics
including the network throughput, per-session throughput, and blocking and dropping
rates, and identify major factors that affect the scalability behavior under the simu-
lated scenarios. We show that the PHY, MAC and routing layers of network functions
interact intricately with one another to determine the network performance. Specifi-
cally, we demonstrate that different mesh sizes (i.e., number of MRs served by one GR)
and different routing paths affect the tolerable interference level across the network
and that they consequently determine the usage of radio resources, i.e, supportable
PHY transmission rates and data time slots, across the network. Particularly, we
show that with more deployed GRs, i.e., more backbone support to the network, the
89

CHAPTER 5. SCALABILITY 90
Figure 5.1: The network topology of the simulated network.
network throughput and per-session throughput improve significantly, and explain
the improvement based on the aforementioned interactions across the layers of net-
work functions. We also study the impact of the two different routing metrics on the
overall network performance.
5.2 Scalability with Different GR Topology
We vary the network topology by deploying different numbers of GRs in the network
while keeping the number and locations of MRs the same. We consider the ‘min air-
time’ routing metric for all the simulations presented in this section. Let K denote
the horizontal separation of adjacent GRs in the number of MRs and L the vertical
separation as shown in Fig. 5.1. Recall that GRs are co-located with MRs. The

CHAPTER 5. SCALABILITY 91
0 1 2 3 4 5 6 7 8 90
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
NUMBER OF HOPS
NU
MB
ER
OF
ME
SH
RO
UT
ER
S
min_hop, 80:1min_air−time, 80:1min_hop, 40:1min_air−time, 40:1min_air−time, 20:1min_air−time, 10:1min_air−time, 5:1min_air−time, 2:1
Figure 5.2: Distribution of the number of hops along paths from MRs to their bestGRs under different scenarios of GR topology and routing metric.
number of MRs served by one GR is then K2 + L2, and is varied over 1, 2, 5, 10, 20,
40, and 80. Table 5.1 shows the values of K and L for each of the topology scenarios
simulated. Fig. 5.2 shows the distribution of the number of hops along paths from
MRs to their best GRs under each of the simulated scenarios. Note that for the case
of ‘min air-time’ and (#MRs):(#GRs) = 2:1, the number of MRs with 0 hop and that
with 1 hop are similar to each other (the numbers are 7200 and 7172, respectively),
leading to the flat start of the corresponding distribution in Fig. 5.2. On the other
hand, for other cases, the distribution starts low and increases with the number of
hops and then decreases again.

CHAPTER 5. SCALABILITY 92
Table 5.1: Parameter values for simulated GR topology
K 8 6 4 3 2 1 1
L 4 2 2 1 1 1 0
(#MRs) : (#GRs) 80 40 20 10 5 2 1
5.2.1 Network Throughput
As discussed in Section 4.9 and seen in Fig. 5.3, the mean network throughput gener-
ally increases as the session arrival rate increases given the network topology and the
routing metric. When the session arrival rate is small, the mean network throughput
increases almost linearly with the arrival rate, successfully serving most of the EUs
arriving to the network. However, as the arrival rate keeps increasing, the network
becomes overloaded and starts to saturate, and the increment in the mean network
throughput decreases and eventually diminishes as shown in Fig. 5.3.
The network throughput behavior can be explained with two related quantities:
the mean PHY transmission rate of successfully received data packets, and the mean
aggregate number of active data time slots used across the network. Fig. 5.4 shows
the mean PHY transmission rate of successfully received data packets among MRs
under different GR topologies. Note that the figure does not include the case of
(#MRs):(#GRs) = 1:1 because data packets are transmitted only between EUs and
MRs but not among MRs under that GR topology. Fig. 5.5 shows the mean aggregate
number of data time slots used for reception at MRs across the network under different
GR topologies. As more EUs arrive and are admitted to the network under a higher
session arrival rate, the interference level on data time slots becomes higher and
thus the supportable PHY transmission rate becomes lower as seen in Fig. 5.4, and
more data time slots are used as shown in Fig. 5.5. As the session arrival rate
keeps increasing, all the usable data time slots eventually become exhausted, and
both of the aggregate number of used data time slots across the network and the
mean supportable PHY transmission rate saturate. In such a congested condition, as
discussed in Section 4.9.4 and shown in Fig. 5.8, the employed ACC scheme AC RF
blocks excessive EUs and thereby controls the interference level on data time slots so

CHAPTER 5. SCALABILITY 93
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
SESSION ARRIVAL RATE (sessions/sec/mesh router)
ME
AN
NE
TW
OR
K T
HR
OU
GH
PU
T (
Mb
ps)
(#MRs):(#GRs) = 80:1(#MRs):(#GRs) = 40:1(#MRs):(#GRs) = 20:1(#MRs):(#GRs) = 10:1(#MRs):(#GRs) = 5:1(#MRs):(#GRs) = 2:1(#MRs):(#GRs) = 1:1
5:1
10:120:1
40:180:1
1:1
2:1
Figure 5.3: Mean network throughput vs. session arrival rate under different gatewayrouter topologies. In all cases, the routing metric ‘min air-time’ is used.
that the network reaches a balance in which the network admits only as many EUs
as it can support providing stable per-session delays. The behavior of the blocking
rate is discussed more later in Section 5.2.3.
Fig. 5.3 shows that the behavior of the network throughput remains consistent
when different numbers of GRs are deployed in the network while the locations and
number of MRs are kept the same. Furthermore, the network throughput improves
significantly as more GRs are deployed. There are two major factors that lead to
such improvement. One is the shorter average path length, i.e., fewer MRs, that each
EU data go through to reach the backbone network. Consequently, serving each EU
requires fewer transmissions and induces less interference, and ultimately uses fewer
radio resources. Accordingly, more EUs can be served simultaneously in the network.
Another key factor to the improved network throughput is the fact that each GR

CHAPTER 5. SCALABILITY 94
0 0.2 0.4 0.6 0.8 1 1.2 1.415
20
25
30
35
40
45
50
55
SESSION ARRIVAL RATE (sessions/sec/mesh router)
ME
AN
PH
Y R
AT
E (
Mb
ps)
(#MRs):(#GRs) = 80:1(#MRs):(#GRs) = 40:1(#MRs):(#GRs) = 20:1(#MRs):(#GRs) = 10:1(#MRs):(#GRs) = 5:1(#MRs):(#GRs) = 2:1
5:1
2:1
10:1
20:1
40:1
80:1
Figure 5.4: Mean PHY transmission rate of successfully received data packets amongMRs under different gateway router topologies. In all cases, the routing metric‘min air-time’ is used.

CHAPTER 5. SCALABILITY 95
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
1.5
2
2.5
3
3.5x 10
5
SESSION ARRIVAL RATE (sessions/sec/mesh router)
TO
TA
L N
UM
BE
R O
F U
SE
D R
EC
EIV
E D
AT
A S
LO
TS
(#MRs):(#GRs) = 80:1(#MRs):(#GRs) = 40:1(#MRs):(#GRs) = 20:1(#MRs):(#GRs) = 10:1(#MRs):(#GRs) = 5:1(#MRs):(#GRs) = 2:1(#MRs):(#GRs) = 1:1
10:1
2:1
1:1
5:1
20:1
80:140:1
Figure 5.5: Mean aggregate number of data time slots used for reception at MRsacross the network under different gateway router topologies. In all cases, the routingmetric ‘min air-time’ is used.

CHAPTER 5. SCALABILITY 96
serves fewer MRs on average, and thus each MR interacts with fewer other MRs.
This leads to fewer constraints on the usage of a data time slot at a MR and in turn
to increased reuse of each data time slot. The aggregate number of data time slots
used for reception at MRs across the network shown in Fig. 5.5 indicates the degree
each data time slot is reused across the network. With more deployed GRs, it is seen
that significantly more data time slots can be used simultaneously and each data time
slot can be reused considerably more.
5.2.2 Per-Session Throughput
As discussed in Section 4.9 and seen in Fig. 5.6, the mean per-session throughput
generally decreases with the increasing session arrival rate given the network topol-
ogy and the routing metric. As discussed in Section 4.9.4, the lower per-session
throughput under a higher arrival rate results from a longer session delay, which is in
turn attributed to two main factors: the lower mean PHY transmission rate on data
time slots due to increased interference, and the longer delay in acquiring resources
at MRs due to more EUs competing for the same resources. However, the decre-
ment in the per-session throughput diminishes as the arrival rate keeps increasing
as shown in Fig. 5.6. Fig. 5.6 also demonstrates that for an admitted EU, a stable
mean per-session throughput is provided under each session arrival rate and that the
mean per-session throughput does not diminish even under heavy traffic loads. It
also indicates that the mean per-session throughput considerably improves with more
deployed GRs.
Due to the tree structure of the routing tables, the mean per-session throughput
provided at a MR greatly varies depending on the path length from the MR to its
best GR and the number of MRs served by the same GR as seen in Fig. 4.6 and
Fig. 5.7. Generally, a significantly larger mean per-session throughput is provided
at a MR that is fewer hops away from its best GR. Let MRn denote a MR that is
n hops away from its best GR under the routing metric being considered. In the
case of (#MRs):(#GRs) = 40:1 and λ = 0.05 shown in Fig. 5.7-(a), 1.1 Mbps can be
provided at MR0, i.e., at a MR co-located with a GR, and 0.23 Mbps at MR5. As

CHAPTER 5. SCALABILITY 97
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
SESSION ARRIVAL RATE (sessions/sec/mesh router)
ME
AN
PE
R−S
ES
SIO
N T
HR
OU
GH
PU
T (
Mbp
s)
(#MRs):(#GRs) = 80:1(#MRs):(#GRs) = 40:1(#MRs):(#GRs) = 20:1(#MRs):(#GRs) = 10:1(#MRs):(#GRs) = 5:1(#MRs):(#GRs) = 2:1(#MRs):(#GRs) = 1:1
10:1
2:1
1:1
5:1
80:140:1
20:1
Figure 5.6: Mean per-session throughput for successfully completed sessions vs. ses-sion arrival rate under different gateway router topologies. In all cases, the routingmetric ‘min air-time’ is used.

CHAPTER 5. SCALABILITY 98
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4(#MRs):(#GRs) = 40:1
HOP
ME
AN
PE
R−S
ES
SIO
N T
HR
OU
GH
PU
T (
Mbp
s)
rate = 0.05rate = 0.1rate = 0.15rate = 0.2
(a)
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4(#MRs):(#GRs) = 10:1
HOP
ME
AN
PE
R−S
ES
SIO
N T
HR
OU
GH
PU
T (
Mbp
s)
rate = 0.1rate = 0.2rate = 0.3rate = 0.4rate = 0.5rate = 0.6
(b)
Figure 5.7: (a) Mean per-session throughput for successfully completed sessions vs.path lengths (hops) under (#MRs):(#GRs) = 40:1; (b) mean per-session throughputfor successfully completed sessions vs. path lengths (hops) under (#MRs):(#GRs) =10:1. In both cases, AC RF and the routing metric ‘min air-time’ are considered.

CHAPTER 5. SCALABILITY 99
more GRs are deployed, the per-session throughput provided at each MRn increases
as exemplified in Fig. 5.7-(b) while the overall trend with the increasing session arrival
rate remains the same under each GR topology scenario.
5.2.3 Blocking Rate
As mentioned in Section 4.9.2, the blocking rate is calculated as the ratio of the
number of blocked sessions to the number of arriving sessions. As explained in Sec-
tion 4.8.4, the employed ACC scheme blocks a new EU from accessing the network
if either any of the existing EUs being served at the admitting MR has not been
allocated sufficient resources for forwarding, or there is no resource left at the MR for
receiving data for the new EU. As seen in Fig. 5.8, the blocking rate increases with
the increasing session arrival rate given the network topology and the routing metric.
This monotonicity follows from the fact that under a higher arrival rate, a new EU
arriving to the network sees more EUs on average that are being served at the MR
to associate with, and thus has a higher probability of being blocked. As the network
starts to saturate with the increasing session arrival rate, the blocking rate increases
very sharply as seen in Fig. 5.8. This sharp increase results from the fact that the
number of EUs supportable by the network saturates with the increasing arrival rate.
Eventually, the blocking rate would asymptotically converge to 100%.
We also calculate the blocking rate for each MRn, n ≥ 0. The blocking rate at
each MRn behaves in a more complicated manner than the overall blocking rate.
Fig. 5.9 shows the blocking rates at different MRn’s in the cases of (#MRs):(#GRs)
= 40:1 and 10:1. The blocking rate at MR0 is significantly smaller than those at
MRn, n > 0 in all cases. This can be explained as follows. Recall that destinations of
user data are assumed to be MRs that are co-located with GRs and thus all existing
EUs served by those MRs are assumed to have been allocated sufficient resources for
forwarding. Therefore, blocking at MR0 occurs only when there is no resource left
for receiving data for a new EU. It turns out that MR0 still tends to have a few data
time slots available for reception for a new EU even when the overall blocking rate
becomes as high as 50%.

CHAPTER 5. SCALABILITY 100
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
10
20
30
40
50
60
70
SESSION ARRIVAL RATE (sessions/sec/mesh router)
BL
OC
KIN
G R
AT
E (
%)
(#MRs):(#GRs) = 80:1(#MRs):(#GRs) = 40:1(#MRs):(#GRs) = 20:1(#MRs):(#GRs) = 10:1(#MRs):(#GRs) = 5:1(#MRs):(#GRs) = 2:1(#MRs):(#GRs) = 1:1
1:1
5:140:1
80:1
2:1
20:1 10:1
Figure 5.8: Blocking rate vs. session arrival rate under different gateway routertopologies. In all cases, the routing metric ‘min air-time’ is used.

CHAPTER 5. SCALABILITY 101
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
10
20
30
40
50
60(#MRs):(#GRs) = 40:1
HOP
BL
OC
KIN
G R
AT
E
rate = 0.05rate = 0.1rate = 0.15rate = 0.2
(a)
0 0.5 1 1.5 2 2.5 30
10
20
30
40
50
60
70
80
90
100(#MRs):(#GRs) = 10:1
HOP
BL
OC
KIN
G R
AT
E
rate = 0.1rate = 0.2rate = 0.3rate = 0.4rate = 0.5rate = 0.6
(b)
Figure 5.9: (a) Blocking rate at MRs as a function of path lengths from MRs to bestGRs under (#MRs):(#GRs) = 40:1; (b) blocking rate at MRs as a function of pathlengths from MRs to best GRs under (#MRs):(#GRs) = 10:1. In both cases, AC RFand the routing metric ‘min air-time’ are considered.

CHAPTER 5. SCALABILITY 102
On the other hand, one has to consider two main factors to understand the block-
ing rates at MRn, n > 0. One factor is the amount of opportunity that MRn acquires
for forwarding data, and the other factor is the amount of radio resources, i.e., data
time slots and the supportable PHY transmission rates over them, that are available
at MRn. Assume that an EU is successfully completed at a MR0 and the MR0 can
now accept new transmission requests from a new EU and/or from its child MR1’s.
If resources are available for its child MR1’s, the child MR1’s would be able to accept
new transmission requests from their respective new EUs or their respective child
MR2’s and so on. Therefore, the chance or opportunity that MRn2 acquires for for-
warding data is smaller than that of MRn1, n1 < n2. On the other hand, due to
the tree structure of the routing tables, MRn2 serves fewer EUs on average and thus
tends to have more available data time slots and higher supportable PHY rates than
MRn1, n1 < n2.
When the mesh size, i.e., the number of MRs, served by one GR is large enough and
the traffic load in the network is light enough so that MRn2 has significantly higher
supportable PHY rates and more available data time slots than MRn1, n1 < n2, it
is possible that MRn2 may transmit more data for a given forwarding opportunity
and thus serve more EUs than MRn1, leading to a smaller blocking rate. This trend
is seen in the case of (#MRs):(#GRs) = 40:1 shown in Fig. 5.9-(a). A similar trend
was observed in the case of (#MRs):(#GRs) = 80:1, not shown here. On the other
hand, when the mesh size served by one GR decreases or the traffic load increases,
the differences in supportable PHY rates and the number of available data time slots
at different MRn’s tend to decrease, and the difference in the amount of opportunity
for forwarding data tends to dominate the blocking rate, leading to a higher blocking
rate at MRn2 than at MRn1, n1 < n2. This trend is clearly seen in the case of
(#MRs):(#GRs) = 10:1 shown in Fig. 5.9-(b) and for smaller mesh sizes not shown
here.

CHAPTER 5. SCALABILITY 103
5.2.4 Dropping Rate
As mentioned in Section 4.9.2, the dropping rate is calculated as the ratio of the num-
ber of dropped sessions to the number of admitted sessions. Recall from Section 4.6
that an EU releases a data time slot after a maximum number of unsuccessful re-
transmissions on the slot, and becomes dropped if it runs out of data time slots. The
successive retransmission failures are primarily due to new interfering transmissions
on the same data slot that were not seen when the data slot was assigned to this
new EU. As seen in Fig. 5.10, when the network is lightly loaded, the dropping rate
generally increases with the increasing session arrival rate. This monotonic increase
under light traffic loads follows from two factors: one is that there are more new
transmissions on each data time slot when more new EUs are admitted across the
network under a higher arrival rate. The other factor is that when the network is
lightly loaded, the interference level on a data time slot is low enough so that multiple
MRs across the network may see the same data time slot available and assign the slot
to new transmissions.
As the arrival rate keeps increasing and the network becomes increasingly satu-
rated, the number of new EUs that are admitted at once across the network tends to
saturate as well. Consequently, the probability of a new EU getting dropped due to
additional new transmissions also tends to saturate. Furthermore, as seen in Fig. 5.10,
the dropping rate may even start to decrease with the increasing arrival rate in some
cases. For example, the dropping rate decreases at around λ = 0.5 in the case of
(#MRs):(#GRs) = 10:1, and at around λ = 0.7 in the case of (#MRs):(#GRs) =
5:1. This decrease can be explained as follows. If the mesh size is small enough and
the traffic load in the network is high enough so that the interference level on data
time slots is too high for the same data time slot to be assigned to multiple new
transmissions simultaneously, then, each data time slot assigned to a new EU or new
transmission may not suffer from as much increase in the co-channel interference as
it did under a lower arrival rate, leading to a decrease in the dropping rate. However,
if the session arrival rate still keeps increasing, the dropping rate would eventually
become rather constant with the increasing arrival rate because the employed ACC
policy would have the number of admitted EUs and the interference level in the

CHAPTER 5. SCALABILITY 104
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
5
10
15
SESSION ARRIVAL RATE (sessions/sec/mesh router)
DR
OP
PIN
G R
AT
E (
%)
(#MRs):(#GRs) = 80:1(#MRs):(#GRs) = 40:1(#MRs):(#GRs) = 20:1(#MRs):(#GRs) = 10:1(#MRs):(#GRs) = 5:1(#MRs):(#GRs) = 2:1(#MRs):(#GRs) = 1:1
2:1
10:1
20:1
40:1
5:1
1:1
80:1
Figure 5.10: Dropping rate vs. session arrival rate under different gateway routertopologies. In all cases, the routing metric ‘min air-time’ are considered.

CHAPTER 5. SCALABILITY 105
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
5
10
15
20
25(#MRs):(#GRs) = 40:1
HOP
DR
OP
PIN
G R
AT
E
rate = 0.05rate = 0.1rate = 0.15rate = 0.2
(a)
0 0.5 1 1.5 2 2.5 30
2
4
6
8
10
12
14
16
18
20(#MRs):(#GRs) = 10:1
HOP
DR
OP
PIN
G R
AT
E
rate = 0.1rate = 0.2rate = 0.3rate = 0.4rate = 0.5rate = 0.6
(b)
Figure 5.11: (a) Dropping rate at MRs as a function of path lengths from MRs tobest GRs under (#MRs):(#GRs) = 40:1; (b) dropping rate at MRs as a function ofpath lengths from MRs to best GRs under (#MRs):(#GRs) = 10:1. In both cases,AC RF and the routing metric ‘min air-time’ are considered.

CHAPTER 5. SCALABILITY 106
network remain rather constant with the increasing arrival rate eventually.
We also calculate the dropping rate for each MRn, n ≥ 0. Fig. 5.11 shows
the dropping rates at different MRn’s in the cases of (#MRs):(#GRs) = 40:1 and
10:1. The dropping rate at MRn2 tends to be smaller than that at MRn1, n1 < n2.
This is because MRn2 tends to have more available data time slots on average than
MRn1, n1 < n2, and thus a data time slot chosen for a new EU at MRn2 tends to
have a lower interference level under the employed data time slot selection algorithm
LIF-S that selects the available data time slot with the lowest interference level. The
reason why the dropping rate at MR0 is noticeably higher than those at MRn, n > 0
is that the blocking rate at MR0 is significantly smaller than those at MRn, n > 0,
and thus an admitted EU tends to get assigned data time slots with far stronger inter-
ference. As the difference between the blocking rate at MR0 and those at MRn, n > 0
increases in a more congested condition over the ranges of arrival rates considered in
this work, the dropping rate at MR0 tends to become increasingly poorer compared
to those at MRn, n > 0, as shown in Fig. 5.11.
5.3 Scalability with Different Routing Metrics
In this section, we present the network performance under the two different routing
metrics, ‘min hop’ and ‘min air-time’, discussed in Section 4.7.4, and examine the
scalability behavior of the performance under two different GR topologies. Recall from
Section 2.3 and Section 4.7 that once routing tables are generated at the beginning
of a simulation run under each network topology and the routing metric, they remain
the same throughout the run. Major differences under the two routing metrics are the
structure of the mesh served by each GR as shown in Fig. 5.2, and the distribution of
the received signal strength and supportable PHY transmission rates over neighbor
MR links as seen in Fig. 5.13.

CHAPTER 5. SCALABILITY 107
5.3.1 Network Throughput
Fig. 5.12 shows the mean network throughput under the two different routing metrics,
‘min air-time’ and ‘min hop’, in the cases of (#MRs):(#GRs) = 40:1 and 80:1. In
both topology scenarios, the mean network throughput is higher under ‘min air-time’.
The difference in the mean network throughput under the two routing metrics can
be explained with two main factors: the mean PHY transmission rate and the mean
number of hops along routing paths. Generally, under ‘min air-time’, the mean PHY
transmission rate is higher as shown in Fig. 5.13 and the mean path length is longer.
As seen in Fig. 5.2, the mean path length from MRs to their best GRs is 2:16 under
‘min hop’ and 2.51 hops under ‘min air-time’ with (#MRs):(#GRs) = 40:1, and is
2.74 under ‘min hop’ and 3.22 under ‘min air-time’ with (#MRs):(#GRs) = 80:1.
When the difference between the two routing metrics in the mean PHY transmission
rate dominates, the network throughput improves, and when the difference in the
mean path length dominates, the network throughput worsens. The higher network
throughput under ‘min air-time’ in both topology scenarios implies that the difference
between the two routing metrics in the mean PHY transmission rate dominates. The
improvement in the network throughput under ‘min air-time’ is smaller in the case
of (#MRs):(#GRs) = 80:1. This is partly because under (#MRs):(#GRs) = 80:1,
the difference between the two routing metrics in the number of hops along routing
paths increases while the difference in the mean PHY transmission rate remains rather
similar, compared to the case of (#MRs):(#GRs) = 40:1.
5.3.2 Per-Session Throughput
As seen in Fig. 5.14, the per-session throughput is higher under ‘min hop’ when the
network is lightly loaded. This is because the mean supportable PHY transmission
rate is high enough in a lightly loaded condition that the time in transmitting data
is comparable to the delay in acquiring resources through the negotiation process
described in Section 4.2. As the network becomes more congested, the mean sup-
portable PHY transmission rate decreases and the time in transmitting data becomes
longer and thus more dominant compared to the delay in acquiring resources. This

CHAPTER 5. SCALABILITY 108
0 0.05 0.1 0.15 0.2 0.25350
400
450
500
550
600
650
700
750
800
850
900
SESSION ARRIVAL RATE (sessions/sec/mesh router)
ME
AN
NE
TW
OR
K T
HR
OU
GH
PU
T (
Mbp
s)
(#MRs):(#GRs) = 80:1, min_air−time(#MRs):(#GRs) = 80:1, min_hop(#MRs):(#GRs) = 40:1, min_air−time(#MRs):(#GRs) = 40:1, min−hop
40:1
80:1
Figure 5.12: Mean network throughput vs. session arrival rate under the two differentrouting metrics considered and AC RF.

CHAPTER 5. SCALABILITY 109
0 0.05 0.1 0.15 0.2 0.2510
15
20
25
30
35
40
45
50
55
SESSION ARRIVAL RATE (sessions/sec/mesh router)
ME
AN
PH
Y R
AT
E (
Mbp
s)
(#MRs):(#GRs) = 80:1, min_air−time(#MRs):(#GRs) = 80:1, min_hop(#MRs):(#GRs) = 40:1, min_air−time(#MRs):(#GRs) = 40:1, min−hop
40:1
80:1
Figure 5.13: Mean PHY transmission rate of successfully received data packets amongMRs under the two different routing metrics considered and AC RF.

CHAPTER 5. SCALABILITY 110
0 0.05 0.1 0.15 0.2 0.250
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
SESSION ARRIVAL RATE (sessions/sec/mesh router)
ME
AN
PE
R−S
ES
SIO
N T
HR
OU
GH
PU
T (
Mbp
s)
(#MRs):(#GRs) = 80:1, min_air−time(#MRs):(#GRs) = 80:1, min_hop(#MRs):(#GRs) = 40:1, min_air−time(#MRs):(#GRs) = 40:1, min−hop
40:1
80:1
Figure 5.14: Mean per-session throughput for successfully completed sessions vs.session arrival rate under the two different routing metrics considered and AC RF.
explains why the difference in the per-session throughput decreases as the arrival rate
increases in each GR topology scenario over the range shown in Fig. 5.14.
5.3.3 Blocking and Dropping Rates
The blocking rate shown in Fig. 5.15-(a) is smaller under ‘min air-time’ in both topol-
ogy scenarios but the difference is not significant, which can be inferred from the
difference in the mean network throughput in Fig. 5.12. On the other hand, the
dropping rate shown in Fig. 5.15-(b) is generally found larger under ‘min air-time’
when the network is saturated. Recall from Section 5.2.4 that dropping occurs mainly
due to new transmissions that were not seen at the time of resource allocation. A

CHAPTER 5. SCALABILITY 111
0 0.05 0.1 0.15 0.2 0.250
10
20
30
40
50
60
70
SESSION ARRIVAL RATE (sessions/sec/mesh router)
BLO
CK
ING
RA
TE
(%
)
(#MRs):(#GRs) = 80:1, min_air−time(#MRs):(#GRs) = 80:1, min_hop(#MRs):(#GRs) = 40:1, min_air−time(#MRs):(#GRs) = 40:1, min−hop
80:1
40:1
(a)
0 0.05 0.1 0.15 0.2 0.250
5
10
15
SESSION ARRIVAL RATE (sessions/sec/mesh router)
DR
OP
PIN
G R
AT
E (
%)
(#MRs):(#GRs) = 80:1, min_air−time(#MRs):(#GRs) = 80:1, min_hop(#MRs):(#GRs) = 40:1, min_air−time(#MRs):(#GRs) = 40:1, min−hop
80:1
40:1
(b)
Figure 5.15: (a) Blocking rate vs. session arrival rate; (b) dropping rate vs. sessionarrival rate under the two different routing metrics considered and AC RF.

CHAPTER 5. SCALABILITY 112
higher network throughput and a larger number of hops along routing paths un-
der ‘min air-time’ result in more new transmissions per time slot and thus a higher
dropping rate.
5.4 Chapter Summary
In this chapter, we determined the performance of the WMN with focus on the
scalability under different scenarios of network topology and routing metric. We first
varied the number and locations of GRs deployed in the network while holding the
total number and locations of the MRs constant and examined the scalability behavior
of several fundamental performance metrics including the network throughput, per-
session throughput, and blocking and dropping rates. We identified major factors
that affect the scalability behavior and showed that the PHY, MAC and routing
layers of network functions interact in a complicated manner with one another to
determine the network performance under each simulated scenario. Those factors
include the co-channel interference that determines supportable PHY transmission
rates; the constraints that the structure of routing tables imposes on the usage of radio
resources at MRs; and the complicated interactions between these factors. Especially,
those factors that result from the multi-hop nature of WMNs were seen to severely
limit the network throughput.
With more deployed GRs, i.e., more backbone support to the network, the network
throughput and per-session throughput were shown to improve significantly, and the
improvement was explained based on the aforementioned interactions across the layers
of network functions. The impact of two different routing metrics on the overall
network performance was also considered. For the network topologies and network
configurations considered in this chapter, the impact of the two different routing
metrics was found insignificant compared to those resulting from the two different
admission and congestion control policies studied in Chapter 4 or different numbers
of GRs deployed in the network.

Chapter 6
Conclusions
6.1 Thesis Summary
In this thesis, we evaluated the performance of WMNs that serve as access networks
over large geographic areas, based on more realistic models for physical and network-
ing layers of network functions that have been often oversimplified in the literature.
We first created a set of new MAC protocols that incorporate such models for the
WMNs. We also developed a large WMN simulator that implements the protocols
and incorporates measurements-based models for radio propagation and interference
calculation for a large built-in urban area. The simulator also captures the stochastic
network behavior resulting from random traffic arrivals, admission control, and queue-
ing. Through extensive simulations incorporating such details, we determined the per-
formance of the WMNs. We investigated the behavior of fundamental performance
metrics including the network throughput, per-session throughput, and blocking and
dropping rates. We identified major factors that affect the performance behavior and
showed that the PHY, MAC and routing layers of network functions interact with
one another in a complicated manner to determine the network performance under
each simulated scenario.
Chapter 2 described the WMN studied in this thesis including its network architec-
ture and envisioned application scenario. The TDMA/TDD-based MAC framework
and the overall network operations within the framework were also illustrated. The
113

CHAPTER 6. CONCLUSIONS 114
WMN simulator was also described including the radio propagation environment and
its simulation models and methodology, PHY considerations, user traffic model and
parameters, and the overall simulation flow.
Chapter 3 proposed a control time slot assignment protocol through which every
MR in the WMN acquires a broadcast time slot that supports a minimum average
received SINR from the MR to all of its neighbor MRs. The protocol incorporates
measurement-based models for radio propagation and interference calculation and
operates in a fully distributed manner. The basic mechanisms and full operations of
the protocol were illustrated along with selection criteria of the protocol parameters
and other design considerations including protocol initialization, deadlock resolution,
and conditions for transmitting NACK packets. Furthermore, a power control scheme
was introduced that allows better utilization of resources for maintaining control time
slots. Extensive simulation results were presented and discussed: the protocol was
shown to support the target minimum average received SINR over all neighbor pairs
of MRs in all simulated scenarios. In addition, the sensitivities of the protocol to
the amount of shadowing of the radio propagation and to the GR topology were
determined. The benefit of the power control scheme was also demonstrated.
In Chapter 4, we developed a protocol that controls the medium access over data
time slots. The protocol utilizes control time slots and operates in a fully cooperative
and distributed manner. Furthermore, the protocol supports adaptive resource allo-
cation through dynamic allocation of data time slots and PHY transmission modes
over the slots as well as through user/queue prioritization. We introduced an ACC
scheme that stabilizes the network under heavy traffic loads, and yet utilizes only
local information available at the admitting router and has a minimal increase in
control overhead. Key elements of the protocol were described including resource
negotiation mechanisms, data time slot selection, queue/session prioritization, data
transmission/retransmission, and resource release. The employed routing protocol
was also presented including its operations and routing metrics. Extensive simulation
results were presented and discussed. Several fundamental performance metrics were
examined including the network throughput, per-session throughput and blocking
and dropping rates. The impact of two ACC schemes on the network performance

CHAPTER 6. CONCLUSIONS 115
were compared and discussed. Particularly, the ACC scheme AC RF was shown to
stabilize the network even under heavy traffic loads unlike the ACC policy AC RO
which becomes unstable at heavy traffic loads.
In Chapter 5, we determined the performance of the WMN with focus on the
scalability under different scenarios of network topology and routing metric. We
first varied the number and locations of GRs deployed in the network and examined
the scalability behavior of fundamental performance metrics including the network
throughput, per-session throughput, and blocking and dropping rates. We identified
major factors that affect the scalability behavior and showed that the PHY, MAC
and routing layers of network functions interact intricately with one another to de-
termine the network performance under each simulated scenario. We demonstrated
that with more deployed GRs, i.e., more backbone support to the network, the net-
work throughput and per-session throughput improve significantly, and explained the
improvement based on the aforementioned interactions across the layers of network
functions. We also studied the impact of two different routing metrics on the overall
network performance. For the network topologies and network configurations con-
sidered in this chapter, the impact of the two different routing metrics was found
insignificant compared to those resulting from the two different admission and con-
gestion control policies studied in Chapter 4 or different numbers of GRs deployed in
the network.
6.2 Contributions
The major contributions of the work in this thesis can be summarized as follows.
• We quantified the performance of WMNs that serve as access networks over large
geographic areas based on measurement-based models for radio propagation
and interference calculation and on more detailed interactions among network
entities, often oversimplified in the literature due to the prohibitive complexity
of analysis and simulations [36,37,42].
• We determined the scalability behavior of the WMN under different scenarios

CHAPTER 6. CONCLUSIONS 116
of network topology and routing metric. Specifically, we varied the number and
locations of GRs deployed in the network while holding the locations and total
number of MRs constant, and also considered two different routing metrics. We
investigated the behavior of several fundamental performance metrics including
the network throughput, per-session throughput, and blocking and dropping
rates, and identified major factors and their interactions with one another that
affect the network performance and scalability behavior [37, 42].
• We created an ACC scheme for the WMN that stabilizes the WMN even under
heavy traffic loads. The ACC scheme incorporates the resource availability at
the intermediate MRs along the path to the destination MR, and yet utilizes
only local information available at the admitting MR and has a minimal increase
in control overhead [37].
• We developed a control time slot assignment protocol through which every MR
in the WMN acquires a broadcast time slot that supports a minimum aver-
age received SINR from the MR to all of its neighbor MRs. The protocol
incorporates measurement-based models for radio propagation and interference
calculation which are often oversimplified in the literature, and operates in a
fully distributed manner [43].
• We created a protocol that controls the medium access over data time slots for
the WMN. The protocol provides mechanisms for network entities (MRs and
EUs) to negotiate and allocate resources in a fully cooperative and distributed
manner. Moreover, the protocol supports adaptive resource allocation through
dynamic allocation of data time slots and PHY transmission modes over the
slots as well as through user/queue prioritization [36,37].
• We developed a high-fidelity and large-scale WMN simulator that incorporates
measurement-based models for radio propagation and interference calculation
for a large built-in urban area. The simulator also captures the stochastic
network behavior resulting from random traffic arrivals, admission control, and
queueing. Furthermore, it employs a parallel-processing simulation technique

CHAPTER 6. CONCLUSIONS 117
that addresses the size and computational complexity of the simulator [36, 37,
42–44].
• We created a parallel processing technique for time-driven simulation of large
and complex wireless networks with substantial PHY details such as radio prop-
agation and interference. Running over a supercomputing platform that com-
prises multiple processors with large high-speed memory and interconnected
with high-speed links, the technique was demonstrated to reduce runtimes sig-
nificantly for two different wireless network simulators [44, 45].
6.3 Future Work
The study performed in this thesis can be extended in various directions. Below is a
partial list of such extensions.
• In all simulations presented in this thesis, we placed MRs at street corners as
illustrated in Section 2.4. We can place them along city blocks, e.g., at mid-
points of block sides. The neighborhood topology of each MR would then be
changed. For example, each MR would now have only one LOS street and would
thus have fewer neighbor MRs on average if other conditions remain the same.
On the other hand, the amount of interference each MR would impose on nearby
MRs would be reduced due to the corner effect mentioned in Section 2.4.2. It is
however not clear how these factors altogether would affect the overall network
performance.
• In Section 4.3, we examined two different algorithms for data time slot selection,
namely, EIF-S and LIF-S. We can consider different algorithms, and determine
their impact on the overall network performance and compare it to that pre-
sented in this thesis.
• In Section 4.4, we considered one user/queue prioritization scheme, i.e., a first-
come-first-served policy with respect to the network admission time of the user.
We can adopt different strategies that utilize additional information such as the

CHAPTER 6. CONCLUSIONS 118
data size that each user requests of the network, the current queue size of the
user at each MR, etc. We could also optimize the queue prioritization jointly
with the data time slot selection algorithm in Section 4.3.
• In Section 4.7.4, two routing metrics were considered for the employed routing
protocol. Although both of them incorporate the underlying network topol-
ogy and one of them integrates the different levels of received signal strengths
over different pairs of neighbor MRs, both metrics do not incorporate the in-
stantaneous traffic status. Moreover, either of the metrics does not include the
processing delay and the medium access acquisition delay at intermediate MRs.
We can consider different routing metrics that integrate instantaneous traffic
statistics of the network as well as the delays at intermediate MRs.
• Throughout this thesis, we considered only best-effert (i.e., without throughput
or delay constraints) web traffic as described in Section 2.6. Different user traffic
types can be considered. One can also consider supporting a mixture of different
traffic types. Delay-sensitive traffic types such as voice or video would impose
an additional set of challenges on the protocol design. Supporting a different
traffic type would require various elements of the data time slot access control
protocol related to resource negotiation and allocation to be modified.
• For the same network topology and configurations, we could implement other
types of MAC protocols that are based on contention-based approaches, e.g., the
IEEE 802.11 MAC protocol, and compare their performance to that presented
in this thesis.

Appendix A
Parallel Time-Driven Simulation
A.1 Introduction
Wireless networks are growing rapidly in both size and complexity, and it is becom-
ing increasingly difficult to investigate such large and complex networks analytically.
Powerful computer simulation tools are thus turning indispensable in studying such
networks. However, accurate and realistic simulation of large wireless networks incor-
porating all relevant models requires significant computing power such that runtimes
on the order of tens of days are needed for a single network configuration and param-
eter set.
In order to reduce the execution time of large wireless network simulation, there
have been several studies for parallelizing the simulation using discrete event simu-
lation (DES) techniques [46–55]. WiPPET [46, 47] is a parallel simulation testbed
for wireless mobile networks. It partitions the network into zones and distributes the
task of received power calculation among them. As a result, it was able to obtain a
speedup gain of almost 6 for 8 processors in some scenarios. However, when the net-
work was partitioned geographically, essentially no speedup gain was achieved due to
substantial communication overhead among zones. SWiMNet [48] is another parallel
simulation framework for wireless mobile cellular networks. It divides the network
based on cells and assigns cells to logical processes (LPs). LPs then execute the sim-
ulation in parallel utilizing pre-computed events. For a simple channel assignment
119

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 120
scheme, the simulator was able to achieve a speedup gain of 12 using 16 processors.
However, speedup gains remain unclear for channel assignment schemes which en-
tail interactions among LPs. Moreover, the simulator does not include radio signal
propagation and thus does not consider the communication overhead among LPs re-
quired for calculating received signal and interference levels. The parallel version [49]
of GloMoSim [50] is yet another example of a parallel wireless network simulator.
Work [49] proposes optimization techniques to reduce communication and synchro-
nization overheads for parallel simulation based on DES techniques, and demonstrates
performance improvements.
For time-driven wireless network simulation, however, there have been few studies
on parallelization techniques. Time-driven simulators are particularly useful when
details of the physical layer characteristics and behavior are to be incorporated into
the simulator because the large amount and high frequency of events from the de-
tailed models would lead to too heavy implementation overhead for event-driven sim-
ulators, as demonstrated in [47, 49]. Because parallelization techniques based on
event-driven simulation do not directly apply to time-driven simulators, we present a
new parallelization technique for time-driven simulators of large and complex wireless
networks [44,45].
Similar to the works previously mentioned, the technique partitions the network
into subareas and assigns one processor to each subarea. Yet it focuses on time-
driven simulation with substantial PHY details such as radio signal propagation and
interference. We identify issues related to the time-driven nature of the simulation
in such key areas as database synchronization, database design, and inter-processor
communication, and create schemes in those areas for effective and efficient paral-
lelization. The enormous computational complexity and communication overhead
for incorporating such details is addressed by a unique computing platform which
comprises multiple processors with large high-speed memory and interconnected with
high-speed links. Such a computing platform has been made possible thanks to recent
advances in supercomputing blade technologies and parallel processing techniques.
The remainder of this appendix is organized as follows. In Section A.2, we describe
the simulation platform and illustrate the principles and issues of the parallelization

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 121
technique. In Section A.3, the technique is applied to two different types of wireless
networks, i.e., circuit-oriented mobile cellular networks with comprehensive resource
management schemes and packet-oriented large WMNs investigated in this thesis,
and is shown to significantly reduce the runtimes. Finally, Section A.4 summarizes
the appendix with final remarks.
A.2 Principles of the Technique
There are three major issues to consider in developing a parallel simulator: workload
partitioning, database synchronization among multiple processors, and data structure
design of the simulator. In this section, we discuss each of the issues in detail. We
first describe our simulation platform.
A.2.1 Simulation Platform
We use a modular supercomputing platform comprising 32 AMD Opteron 64-bit
processors running at a 2.0 GHz clock speed with 2 GB memory each. Groups of
4 processors are interconnected via 2 GB/s Infiniband links and processors within a
group are connected via 8 GB/s links. Fig. A.1 shows our supercomputing platform.
On the platform, we use a version [56] of Message Passing Interface (MPI) which is
a widely used standard library for parallel processing.
A.2.2 Workload Partitioning
Overview
To gain from parallel processing, workload should be efficiently distributed among
multiple processors. For simulating a large wireless network, two general approaches
can be considered [47]: geography-based partitioning and channel-based partitioning.
In geography-based partitioning, we divide the network into subareas and assign one
processor to each subarea. In this case, because co-channel interferers are handled by
multiple processors, processors have to exchange co-channel interference information

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 122
Figure A.1: Our supercomputing platform
among themselves. In channel-based partitioning, on the other hand, processors are
assigned a subset of channels and co-channel interferers on each channel are han-
dled by a single processor. Operations across different subsets of channels assigned
to different processors are handled by a more powerful processor, called a master
processor.
Geography-Based Partitioning
Fig. A.2 illustrates the primary communication pattern among processors performed
in one simulation time step under both types of workload partitioning. Under geography-
based partitioning in Fig. A.2-(a), processors first process their assigned set of network
entities independently without communicating with one another. Once all the pro-
cessors complete updating the network entities, they collectively communicate with
one another to exchange the updates. These exchanged updates are mainly related to
updated interference information, e.g., changes in locations of mobile users, changes
in transmit power levels, etc., which has to be known to other processors before the

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 123
...P1 P2 P3 Pn
...P1 P2 P3 Pn
Master Processor
...P1 P2 P3 Pn
...P1 P2 P3 Pn
(a) (b)
Figure A.2: Primary communication pattern among processors in one simulationtime step: (a) geography-based; (b) channel-based workload partitioning. Pi denotesa processor.
processors proceed to the next time step. The size of each subarea is calculated
proportional to the workload in the subarea, primarily the traffic load, so that work-
load is distributed uniformly among processors. For example, for a uniform traffic
load, subareas are equally sized. In the current version of the technique, workload
is distributed at the beginning of simulation according to the input traffic load, and
remains the same throughout the simulation. That is, workload partitioning is not
adaptive to varying network conditions over the course of simulation.
The interference information exchange among processors in every time step incurs
considerable communication overhead among processors, and it may overshadow the
gain from distributing workload among processors as reported in [47, 49]. It is thus
critical to have fast communications links among processors to gain from geography-
based workload partitioning. Thanks to the high-speed Infiniband links, the technique
implemented in this thesis, which employs geography-based workload partitioning,
was indeed able to achieve significant speedup gains as demonstrated in Section A.3.
Channel-Based Partitioning
In channel-based partitioning illustrated in Fig. A.2-(b), processors first update the
network entities on their subset of channels independently, similar to the case of

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 124
geography-based partitioning. Once they complete updating, all the processors trans-
fer the updates to the master processor. The master processor then performs oper-
ations across different subsets of channels such as handoff, channel selection for new
users, etc. based on the updates from the processors, and finally broadcasts the
results back to the processors. We note that since co-channel interferers on a chan-
nel are handled by a single processor, operations performed by different non-master
processors are orthogonal; thus, they do not need to exchange interference informa-
tion among themselves directly. They communicate only with the master processor
for inter-processor operations. As a result, the approach incurs less communication
overhead than the geography-based approach.
Because this partitioning approach places significantly more workload on the mas-
ter processor, it is more appropriate when one processor is more powerful than the
others. In addition, this approach may not be applicable to a wireless network in
which orthogonal channels are not clearly defined such as one running the IEEE
802.11 MAC protocol on a single frequency channel. Moreover, parallelization gain
may be limited when the number of orthogonal channels available in the simulated
network is less than that of available processors.
Adopted Scheme
Considering our computing platform with 32 equal processors and a very fast commu-
nication architecture among the processors, we choose a geography-based partitioning
approach: the network is divided into subareas and each subarea is handled by one
processor. Network entities are then assigned to one of these processors. The as-
signment is primarily based on their geographical locations: an entity is assigned to
the processor that handles the subarea where the entity is located. However, users
are typically assigned to the processor that handles the network entity with which
the users are primarily associated, e.g., base stations in a cellular network. This is
because if users were assigned to a processor according to their locations, any data
exchange between a user and its associated network entity located in a different sub-
area would have to be transferred between the two corresponding processors resulting
in large inter-processor communication overhead. Section A.2.4 provides more details

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 125
on designing the database according to the chosen geography-based partitioning.
A.2.3 Synchronization
Since the database of a parallel simulator is updated by multiple processors simulta-
neously, it is critical to properly synchronize the database update among processors.
In a single processor sequential program, any update is immediately written to the
database and the processor instantly refers to the updated database for subsequent
operations; in this way, the synchronization is handled trivially. In a parallel program,
on the other hand, when a processor handles its assigned set of network entities during
a simulation time step, it does not have access to the updates that other processors
make during the same simulation time step until the processors communicate with
one another. This limited access leads to two major considerations: one is to main-
tain a duplicate of part of database for intra-processor updates, and the other is to
transfer updates for inter-processor updates.
Intra-Processor Synchronization
To manage intra-processor synchronization, we maintain a duplicate of the part of
database which is constantly referred to and updated by other processors, e.g., the
part which contains interference related information. With the duplicate, processors
refer to the original database when computing updates, and write the updates onto
the duplicate. Consequently, the original database remains intact over one simulation
time step and the processors are ensured to be referring to the identical database.
Keeping the duplicate is necessary because if we let processors immediately write
updates to the database as in the sequential program, the replicas of the database in
different processors would become dissimilar and even inconsistent from one another
over one simulation time step. As a result, processors could operate on incompatible
replicas of the database.
In maintaining the duplicate, it is critical to ensure that a particular resource,
e.g., a frequency channel, which is found available at the beginning of a simulation
time step is not allocated to multiple network entities over the same time step. To

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 126
resolve such conflicts internal to a single processor, the processor checks the resource
availability in the duplicate database as well as the original one when computing
updates. If a conflict occurs between different processors, the involved processors
collectively resolve it as explained below.
Finally, we note that any part of a database which is accessed by only one processor
does not need a duplicate. More details on database design in consideration of the
duplicate maintenance are described in Section A.2.4.
Inter-Processor Synchronization
Inter-processor synchronization deals with situations in which a processor needs to
update a part of database assigned to other processors. Typically, these updates
are made at boundaries of subareas where adjacent network entities interacting with
each other may be located in different subareas handled by different processors. For
example, in a mobile cellular network, a base station may have to hand-off a user
located close to a subarea boundary to another base station outside of the subarea
which the sending base station belongs to. Or in a multi-hop wireless network, a
router near a boundary may have to transmit a packet to an adjacent router in
another subarea. These updates are stored in an additional data structure. More
details on database design for inter-processor updates are provided in Section A.2.4.
Once processors finish updating their assigned network entities, they transfer the data
structure of inter-processor updates to corresponding destined processors. Destined
processors then incorporate the transferred updates into their updated database.
When incorporating updates transferred by different processors during a simula-
tion time step, there may occur conflicts in which the same resource is claimed by
multiple network entities. This type of conflict seems inherent in any parallel pro-
gram in which more than one processor can modify the same part of database. Such
a conflict has to be resolved depending on the context of the simulated network. For
example, consider a mobile cellular network and a user in a subarea handed-off to
a base station in another subarea. In that case, a simple scheme can be devised as
follows. When a destined base station processes the transferred users from other sub-
areas in other processors, it checks for each of the users whether the initially assigned

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 127
channel has been taken by other users during the same simulation time step. If not,
it simply confirms the assignment and updates the database accordingly. Otherwise,
it attempts another assignment process to find a new channel. If a channel is found,
the new channel is assigned to the user. Otherwise, the user is blocked or dropped.
A.2.4 Database Design
The entire database of the simulator can be divided into four groups, and Fig. A.3
illustrates the different groups for an example of two processors.
DB unchanged
This group includes those data structures which are determined during the initializa-
tion phase of simulation and do not change afterwards, e.g., shadowing maps which
store shadowing values for a set of geographical locations across the simulated uni-
verse. All processors have the same copy of this part and thus, do not exchange it
among themselves. With N processors involved, the parallel simulator has N copies of
this part across the processors; hence, the memory overhead is linear in the number
of processors.
DB single
This group contains those data structures which are updated as simulation evolves
but by only one processor. Any data structure that other processors do not need to
access for their operations belongs to this part of database. For example, in a wireless
mesh network, a routing table of a wireless router may not be needed or accessible
by other routers. In that case, a processor does not exchange with other processors
the routing tables of the routers assigned to itself. Note that this part of database is
distributed among processors according to the workload partitioning scheme discussed
in Section A.2.2. For equal-sized subareas, processors hold 1/N of the total for N
processors involved. Regardless of the partitioning strategy, the aggregate size across
the processors remains constant for different numbers of processors.

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 128
computation phase
P1
DB_request_send (p1)
DB_request_rcv (p1)
DB_unchanged
DB_single (p1)
DB_multiple
DB_multiple_dup
P2
DB_request_send (p2)
DB_request_rcv (p2)
DB_unchanged
DB_single (p2)
DB_multiple
DB_multiple_dup
DB_request_rcv (p1)
DB_request_send (p1)
DB_request_rcv (p2)
DB_request_send (p2)
DB_multiple
DB_multiple_dup
DB_multiple
DB_multiple_dup
inter-processor update transfer
duplicate DB exchange
communication phase
Figure A.3: Database structure and operations executed in one simulation time stepfor an example of two processors. A computation phase is followed by a communica-tion phase.

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 129
DB multiple and DB multiple dup
This group includes segments which are referred to and updated by multiple pro-
cessors in each simulation time step. The data are mainly related to calculating
co-channel interference. Every processor has the same copy of this group, and thus,
for N processors used, the parallel simulator has a total of N copies across proces-
sors, resulting in a linear memory overhead in the number of processors. The shaded
region within DB multiple denotes the subarea that the corresponding processor han-
dles. For example, processor p1 handles the first half and processor p2 processes the
second half. Moreover, as explained in Section A.2.3, processors keep a duplicate
of this group, denoted as DB multiple dup in Fig. A.3. When a processor needs to
update part of DB multiple assigned to itself, it writes the update onto the corre-
sponding location in DB multiple dup. As a result, the same copy of DB multiple is
referred to by all processors during each simulation time step.
It is important to design this part of database to be amenable to exchange among
processors. We choose to store each type of network entity into an array according
to the subarea in which the entities are assigned because arrays are very efficiently
exchanged among processors using MPI [56], a standard library for parallel processing
used in this parallel simulation platform. Consider a 2-processor parallel simulator,
for example. For simulating a cellular network, we create an array with 2 entries and
each entry contains base stations located in one subarea. Similarly, for simulating a
wireless mesh network, wireless mesh routers are stored into an array according to
their locations in the network. While each processor keeps all the entries of such an
array in its memory, it updates only the entry corresponding to the subarea assigned
to itself.
DB request send and DB request rcv
The last group contains the data structures for storing and transferring inter-processor
updates discussed in Section A.2.3. Each type of update is stored into an array, simi-
lar to the data structures in DB multiple discussed above in this section. Each entry
of such an array corresponds to one destined processor. We note that the entry

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 130
size of an array for each type of update has to be determined from the frequency of
such updates between two processors over one simulation time step. For example,
for storing data packets in a wireless mesh network to be transferred to one destined
processor, each entry needs to be large enough to account for the number of such data
packet transmissions between two adjacent routers and the number of routers near
the subarea boundary between the two corresponding processors. We finally mention
that the size of such an array combined across the processors tends to increases with
the number of processors because more network entities are near subarea boundaries
as the size of each subarea shrinks with more processors. Consequently, the commu-
nication overhead of transferring these data structures tends to increase with more
processors for a given simulated network.
A.2.5 Examples
Interference Calculation
When a processor calculates the received co-channel interference level at a receive
node in its subarea, it refers to DB multiple for transmission status, transmit power
level, geographical location, etc. to compute the path-loss from each of the co-channel
interferers in the simulated universe. Recall that transmission related information for
all network entities is kept in DB multiple of each processor. The shadowing value,
on the other hand, is determined based on the shadowing maps in DB unchanged
which is also held in each processor.
Inter-Processor Updates
Consider a wireless router transmitting a data packet to another router in a subarea
handled by another processor. The router will store the data packet into an entry
in DB request send corresponding to the destined processor. There may be multiple
such data packets to be transferred to other processors when all the routers in a
subarea complete transmitting data packets. Processors wait until all routers in all
processors finish updating. Then, they transfer DB request send to DB request rcv in

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 131
destined processors. Upon receiving updates from other processors, destined proces-
sors process and incorporate the updates into their database. For example, a router
receiving a data packet from another router in a different processor would update the
queue size and other related information accounting for the newly arrived packet.
A.2.6 System Routine
Given the workload partitioning, synchronization schemes, and database structure
discussed so far, operations executed in each simulation time step can be grouped
into two groups. The first group forms a computation phase where each processor
independently processes its assigned set of network entities, and the second group
comprises a communication phase where all the processors collectively communicate
with one another to exchange updates made during the computation phase. Fig. A.3
illustrates the flow of operations performed in one simulation time step for an example
of two processors.
Arrows in the figure between different parts of database and processors indicate
the flow of read/write operations: processors refer to DB unchanged, DB single, and
DB multiple when computing updates for their assigned subarea; processors write
updates into the corresponding location within DB single and DB multiple dup, and
DB request send for intra- and inter-processor updates, respectively. In the subse-
quent communication phase, processors transfer DB request send to DB request rcv
of other processors and, incorporate the inter-processor updates into their database.
Then finally, they exchange DB multiple dup with one another to update interference
related information made over the current simulation time step. In the next time step,
the entire routine is repeated with the updated database.
A.3 Numerical Results
In this section, we present and discuss numerical results from two different simulators
that employ the technique illustrated in this appendix. One is a mobile cellular
network simulator developed in [25, 26] as a sequential program and modified in [45]

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 132
for parallel processing. The other is a large WMN simulator created for this thesis.
The WMN simulator was created as a parallel program from the beginning.
A.3.1 Mobile Cellular Network Simulator
The simulator is developed to examine the effects of various dynamic schemes for
channel allocation, power control, and adaptive antennas on system performance.
The simulated network consists of a 16 x 16 grid of base stations with 850 m grid
spacing in a toroidal universe in which a radio signal propagating out of the universe
reappears at the opposite edge and continues to propagate in the same direction.
Each base station can access up to 128 channels. Signal propagation is modeled by
path-loss and correlated shadowing. Interference from all co-channel interferers is
included in calculating the received SINR.
The two lower sets of curves in Fig. A.4-(a) show the runtimes of the parallel pro-
gram versus the number of processors for two systems with different computational
complexity. Each runtime is obtained from one long simulation run. One system em-
ploys a channel assignment scheme, called autonomous reuse partitioning (ARP); the
other system incorporates not only the channel assignment scheme but also schemes
for power control and beamforming with multiple antennas, designated in the figure
as PC and OB, respectively. Each system was run under various network traffic load
levels, measured in Erlangs (Erl) per base station. The runtimes with a single pro-
cessor were obtained from the existing sequential simulator. We first note the huge
difference in runtimes between the two systems. For the more complex system, one
simulation run on a single processor took longer than 7 days. On the other hand, most
of the runs for the system of lighter complexity took less than one day on a single
processor. This difference in runtimes is mainly due to the different computational
complexity and simulated traffic load levels; the more complex system was simulated
under much heavier traffic loads. The more complex system also requires more time
to stabilize the statistical variation in the results.
The runtime behavior of the parallel simulator is more clearly seen in Fig. A.4-
(b) where the speedup gain versus the number of processors is presented. For the

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 133
0 5 10 15 20 25 30 350
2000
4000
6000
8000
10000
12000
number of processors
run
tim
e (m
inu
tes)
cellular, Erl 15, ARPcellular, Erl 20, ARPcellular, Erl 25, ARPcellular, Erl 30, ARPcellular, Erl 35, ARP+PC+OBcellular, Erl 40, ARP+PC+OBWMN
4 days 2 hrs
2 days 2 hrs
17 hrs
6 days 22 hrs
7 days 17 hrs
1 day 5 hrs18 hrs 14mins
6 hrs 30 mins
(a)
0 5 10 15 20 25 30 350
5
10
15
20
25
30
35
number of processors
spee
du
p
cellular, Erl 15, ARPcellular, Erl 20, ARPcellular, Erl 25, ARPcellular, Erl 30, ARPcellular, Erl 35, ARP+PC+OBcellular, Erl 40, ARP+PC+OBWMN
(b)
Figure A.4: Performance of the parallel simulation technique for a mobile cellularnetwork simulator and a WMN simulator: (a) runtime vs. number of processors; (b)speedup gain vs. number of processors.

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 134
more complicated system, the speedup gain is almost linear up to 8 processors and
noticeably less than linear but more than 11 with 16 processors. The almost linear
gain implies that the inter-processor communication overhead for the parallel pro-
cessing is almost negligible as compared to the computation load. On the other hand,
the speedup gain for the less complicated system is far less than linear. This rather
low gain suggests that the communication phase in the system routine is compara-
ble to the computation phase so that the gain from distributing the computational
workload among processors is offset by the communication overhead. We also note
the increased runtime (or speedup less than one) with the parallel processing in the
case of 15 Erlangs. In this simulation scenario, the network is very lightly loaded
so that the computation workload is minimal and the inter-processor communication
overhead tends to dominate the overall runtime, resulting in a longer runtime with
the multiple processors. This observation is, in fact, consistent with the results of
the parallel version of GloMoSim given in [49]. It is thus seen that a more complex
program benefits more from the parallel processing.
Fig. A.5 plots grade of service (GOS) values for each simulation run. GOS is a
combination of blocking and dropping rates and is approximately the sum of the two
rates. Although GOS is observed to be consistently a little higher for the parallel
program, the increase due to the database synchronization discussed in Section A.2.3
is negligible. Overall, the GOS results of the parallel program are consistent with
those of the sequential program in all simulated scenarios.
Example: Capacity of the Mobile Cellular Network Employing Optimal
Integrated Resource Allocation Schemes
We now give a set of numerical results on the capacity of the simulated mobile cel-
lular network that employs the integrated resource allocation schemes, i.e., with a
dynamic channel assignment scheme called autonomous reuse partitioning (ARP),
power control and optimal beamforming together. The capacity of the network is
represented by the offered traffic supported at a specific GOS. In [26], the capacity of
the integrated system with a reduced set of 40 channels was found from simulations.
However, due to the prohibitive runtimes, the capacity for the original 128 channels

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 135
0 2 4 6 8 10 12 14 160
5
10
15
20
25
30
number of of processors
GO
S (
Gra
de
of
Ser
vice
, %)
Erl 15, ARP
Erl 20, ARP
Erl 25, ARP
Erl 30, ARP
Erl 35, ARP+PC+OB
Erl 40, ARP+PC+OB
Figure A.5: Grade of service (GOS) vs. number of processors of a mobile cellularnetwork.
could not be obtained. Instead, the capacity was extrapolated based on the results
for the reduced 40 channels. In Fig. A.6, the extrapolated curve is plotted along with
the capacity found from simulations in [45]. As can be seen, the extrapolation un-
derestimates the capacity noticeably, which shows that the capacity behavior of the
simulated network is very complex and thus difficult to extrapolate accurately even
for a change in the number of channels available to the system. The GOS values for
110 and 120 Erlangs were obtained using both a single processor and 16 processors.
Each of the runs with a single processor took more than 22 days while it took about
2 days with 16 processors, yielding a speedup of more than 11. For 130 Erlangs, 32
processors were used and it took less than 35 hours.
We also plot the results for a system employing the Erlang-B queuing discipline
(dashed curves). In the Erlang-B discipline, a channel is assigned as long as it is not
occupied. Such detrimental factors as path loss, shadowing, interference, or mobility
to the channel quality are not considered in the discipline and consequently no call

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 136
100 105 110 115 120 125 1300
1
2
3
4
5
6
7
8
Offered traffic (Erlang/Cell)
GO
S (G
rade
of S
ervic
e, %
)
ARP+PC+OB, chan 128, extrapolatedARP+PC+OB, chan 128, simulated Erlang!B, chan 128
Erlang!B, chan 132
Erlang!B, chan 136
Erlang!B, chan 140
Figure A.6: Grade of service (GOS) vs. offered traffic (Erlang/cell) for the simulatedmobile cellular network with and without extrapolation for 128 channels, along withErlang-B system.
is dropped. Thus, an Erlang-B curve serves as an upper bound in performance for a
system with the same number of channels. However, in Fig. A.6, it is seen that the
integrated system outperforms an Erlang-B system with 128 channels. This outper-
formance was also observed for 40 channels in [26]. This extra gain was explained
in [26] to come from the directed retry (DR) mechanism, where more than one base
station is tried for new calls and hand-offs. DR essentially redirects transient overflow
of call attempts to other favorable base stations when a channel in the best base sta-
tion is not available. Thus, the capacity of the integrated system with 128 channels is
effectively higher than that of the Erlang-B system with the same number of channels.
From Fig. A.6, the effective number of channels of the integrated system is found to
be more than 136 channels for 1% GOS and more than 132 channels up to 5% GOS,
which translates to effective channel reuse factors of 0.94 and 0.97, respectively.

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 137
A.3.2 Large Wireless Mesh Network Simulator
The uppermost curve in Fig. A.4-(a) shows the runtimes of the WMN simulator
developed in this thesis versus the number of processors for a single parameter set
and network configuration. Each runtime is obtained from one long simulation run. A
single run took longer than 4 days using 8 processors, and 1 day and 5 hours with 32
processors. These long runtimes are due to the substantial computational complexity
of the simulator resulting from the huge network size and the large number of mesh
routers.
The corresponding speedup of the parallel WMN simulator is shown in the upper-
most curve in Fig. A.4-(b). For that curve, the speedup up to 8 processors is approxi-
mately linear in the number of processors from the observation that the speedup gain
with 16 processors is almost a factor of 2 compared to the case with 8 processors.
Then, we obtain a speedup gain of almost 27 using 32 processors. This tremendous
gain from parallel processing implies that the inter-processor communication over-
head is negligible compared to the computation workload. We note that the speedup
performance of this simulator is better compared to the cellular network simulator
discussed in Section A.3.1. This is because the WMN simulator has been designed
based on the parallel processing technique from the beginning so that it has been
more optimized to the technique than the cellular network simulator which has been
modified from an existing sequential simulator.
A.4 Summary
In this appendix, we presented a parallel processing technique for time-driven sim-
ulation of large and complex wireless networks with substantial PHY details such
as radio signal propagation and interference. We identified and demonstrated issues
of the technique related to the time-driven nature of the simulation with regards to
workload partitioning, synchronization, and database design, and proposed schemes
in those areas for effective and efficient parallelization. The enormous computational
complexity and inter-processor communication overhead of the parallel simulator is

APPENDIX A. PARALLEL TIME-DRIVEN SIMULATION 138
addressed on a supercomputing platform that comprises multiple processors with
large high-speed memory and interconnected with high-speed links.
We applied the technique to two different wireless network simulators, a mobile
cellular network simulator and a large WMN simulator, and demonstrated its per-
formance. The technique was shown to achieve significant runtime speedup gains
for both simulators; for one set of simulation parameters and network configuration,
a speedup gain of more than 11 was obtained using 16 processors from the mobile
cellular network simulator, and almost 27 using 32 processors from the large WMN
simulator. The substantial gains from both simulators indicate that the technique is
general enough to be applied to different types of complex wireless networks.

Bibliography
[1] I. Akyildiz and X. Wang, “A survey on wireless mesh networks,” IEEE Commu-
nications Magazine, vol. 43, no. 9, pp. S23–30, Sep. 2005.
[2] R. Bruno, M. Conti, and E. Gregori, “Mesh networks: commodity multihop ad
hoc networks,” IEEE Communications Magazine, vol. 43, no. 3, pp. 123–131,
Mar. 2005.
[3] M. Lee et al., “Emerging standards for wireless mesh technology,” IEEE Wireless
Communications Magazine, vol. 13, no. 2, pp. 56–63, Apr. 2006.
[4] Google, Inc. [Online]. Available: http://www.google.com/corporate/
[5] Tropos, Inc. [Online]. Available: http://www.tropos.com
[6] E. Perkins, E. Belding-Royer, and S. Das. (2003, Jul.) Ad hoc on demand distance
vector (AODV) routing. [Online]. Available: http://www.ietf.org/rfc/rfc3561.txt
[7] C. Perkins and P. Bhagwat, “Highly dynamic destination-sequenced distance-
vector (DSDV) routing for mobile computers,” ACM SIGCOMM Computer
Communication Review, vol. 24, no. 4, pp. 234–244, Oct. 1994.
[8] D. Johnson and D. Maltz, “Dynamic source routing in ad hoc wireless networks,”
Mobile Computing, vol. 353, pp. 153–181, 1996.
[9] T. Clausen and P. Jaquet. (2003, Oct.) Optimized link state routing protocol
(OLSR). [Online]. Available: http://www.ietf.org/rfc/rfc3626.txt
139

BIBLIOGRAPHY 140
[10] R. Draves, J. Padhye, and B. Zill, “Comparisons of routing metrics for static
multi-hop wireless networks,” Prof. of ACM Special Interest Group on Data
Communications Conference (SIGCOMM), pp. 133–144, Aug. 2004.
[11] ——, “Routing in multi-radio, multi-hop wireless mesh networks,” Proc. of ACM
Mobile Computing and Networking Conference (MOBICOM), pp. 114–128, Sep.
2004.
[12] D. Couto et al., “A high-throughput path metric for multi-hop wireless routing,”
Wireless Networks, vol. 11, no. 4, pp. 419–434, Jul. 2005.
[13] IEEE Std. 802.11, 1999 Edition (R2003), “Information technology - Telecommu-
nications and information exchange between systems - Local and metropolitan
area networks - Specific requirements - Part 11: Wireless LAN Medium Access
Control (MAC) and Physical Layer (PHY) Specifications.”
[14] Z. Tang and J. Garcia-Luna-Aceves, “A protocol for topology-dependent trans-
mission scheduling in wireless networks,” Proc. of IEEE Wireless Communica-
tions and Networking Conference (WCNC), pp. 1333–1337, Sep. 1999.
[15] C. Zhu and M. Corson, “A five-phase reservation protocol (FPRP) for mobile ad
hoc networks,” Wireless Networks, vol. 7, no. 4, pp. 371–384, Jul. 2001.
[16] ——, “An evolutionary-TDMA scheduling protocol (E-TDMA) for mobile ad
hoc networks,” Proc. of Advanced Telecommunications/Information Distribution
Research Program (ATIRP), Mar. 2000.
[17] W. Smith, “Urban propagation modeling for wireless systems,” Ph.D. disserta-
tion, Stanford University, Stanford, CA, USA, Feb. 2004.
[18] M. Feuerstein et al., “Path loss, delay spread, and outage models as functions of
antenna height for microcellular system design,” IEEE Transactions on Vehicular
Technology, vol. 43, no. 3, pp. 487–498, Aug. 1994.

BIBLIOGRAPHY 141
[19] J. Berg, R. Bownds, and F. Lotse, “Path loss and fading models for microcells
at 900 MHz,” IEEE Vehicular Technology Conference (VTC), pp. 666–671, May
1992.
[20] A. Goldsmith and L. Greenstein, “A measurement-based model for predicting
coverage areas of urban microcells,” IEEE Journal on Selected Areas in Com-
munications, vol. 11, no. 7, pp. 1013–1023, Sep. 1993.
[21] D. Cox, R. Murray, and A. Norris, “800 MHz attenuation measured in and
around suburban houses,” AT & T Bell Laboratories Technical Journal, vol. 63,
no. 6, pp. 921–954, Jul./Aug. 1984.
[22] W. Jakes, Ed., Microwave mobile communications. IEEE Press, 1994.
[23] A. Goldsmith, Wireless communications. Cambridge University Press, 2005.
[24] M. Gudmundson, “Correlation model for shadow fading in mobile radio systems,”
IET Electronics Letters, vol. 27, no. 23, pp. 2145–2146, Nov. 1991.
[25] A. Lozano, “Integrated dynamic channel assignment and power control in mo-
bile wireless communications systems,” Ph.D. dissertation, Stanford University,
Stanford, CA, USA, Nov. 1998.
[26] S. S. Cheng, “Integrated resource allocation and adaptive antennas in mobile
cellular systems,” Ph.D. dissertation, Stanford University, Stanford, CA, USA,
Feb. 2002.
[27] A. Doufexi et al., “A comparison of the HIPERLAN/2 and IEEE 802.11a wireless
LAN standards,” IEEE Communications Magazine, vol. 40, no. 5, pp. 172–180,
May 2002.
[28] A. Reyes-Lecuona et al., “A page-oriented WWW traffic model for wireless sys-
tem simulations,” Proc. of International Teletraffic Congress (ITC) ’16, pp.
1271–1280, Jun. 1999.

BIBLIOGRAPHY 142
[29] I. Chlamtac and S. Kutten, “A spatial-reuse of TDMA/FDMA for mobile multi-
hop radio networks,” Proc. of IEEE Conference on Computer Communications
(INFOCOM), 1985.
[30] I. Cidon and M. Sidi, “Distributed assignment algorithms for multihop packet
radio networks,” IEEE Transactions on Computers, vol. 38, no. 10, pp. 1353–
1361, Oct. 1989.
[31] A. Ephremedis and T. Truong, “Scheduling broadcasts in multihop radio net-
works,” IEEE Transactions on Communications, vol. 38, no. 4, pp. 456–460,
Apr. 1990.
[32] S. Ramanathan, “A unified framework and algorithm for channel assignment in
wireless networks,” Wireless Networks, vol. 5, no. 2, pp. 81–94, Mar. 1999.
[33] F. Tobagi and L. Kleinrock, “Packet switching in radio channels: Part ii - the
hidden terminal problem in carrier sense multiple-access modes and the busy-
tone solution,” IEEE Transactions on Communications, vol. 23, no. 12, pp. 1417–
1433, Dec. 1975.
[34] M. Garey and D. Johnson, Computers and intractability: a guide to the theory
of NP-completeness. San Francisco, CA: Freeman, 1979.
[35] T. Kanai, “Autonomous reuse partitioning in cellular systems,” Proc. of IEEE
Vehicular Technology Conference (VTC), pp. 782–785, May. 1992.
[36] H. Lee and D. Cox, “A fully cooperative and distributed medium access control
protocol for large TDMA/TDD-based wireless mesh networks,” Proc. of IEEE
Vehicular Technology Conference (VTC)-Spring, Apr. 2009.
[37] ——, “Admission and congestion control for large-scale wireless mesh access net-
works,” To Appear in Proc. of IEEE Wireless Communications and Networking
Conference (WCNC), Apr. 2010.
[38] C. Zhu and M. Corson, “Qos routing for mobile ad hoc networks,” Proc. of IEEE
Conference on Computer Communications (INFOCOM), pp. 958–967, Jun. 2002.

BIBLIOGRAPHY 143
[39] I. P802.11s/D0.01, “Draft amendment to standard IEEE 802.11: ESS mesh net-
working,” IEEE, Mar. 2006, work in progress.
[40] M. Bahr, “Proposed routing for IEEE 802.11s WLAN mesh network,” Proc. of
Wireless Internet Conference (WICON), Aug. 2006.
[41] D. Zhao, J. Zou, and T. Todd, “Admission control with load balancing in IEEE
802.11-based ESS mesh networks,” Wireless Networks, vol. 13, no. 3, pp. 351–
359, Jun. 2007.
[42] H. Lee and D. Cox, “Throughput and scalability of large-scale wireless mesh
access networks,” In preparation.
[43] ——, “A fully-distributed control time slot assignment protocol for large wire-
less mesh networks,” Proc. of IEEE Military Communications Conference (MIL-
COM), Nov. 2008.
[44] H. Lee, V. Manshadi, and D. Cox, “High-fidelity and time-driven simulation of
large wireless networks with parallel processing,” IEEE Communications Maga-
zine, vol. 47, no. 3, pp. 158–165, Mar. 2009.
[45] H. Lee et al., “High-fidelity simulation of mobile cellular systems with integrated
resource allocation and adaptive antennas,” Proc. of IEEE Wireless Communi-
cations and Networking Conference (WCNC), pp. 3210–3215, Mar. 2007.
[46] J. Panchal et al., “Parallel simulations of wireless networks with TED: radio
propagation, mobility and protocols,” Performance Evaluation Review, vol. 25,
no. 4, pp. 30–39, Mar. 1998.
[47] ——, “WiPPET, a virtual testbed for parallel simulations of wireless networks,”
Proc. of Parallel and Distributed Simulation (PADS), May 1998.
[48] A. Boukerche, S. K. Das, and A. Fabbri, “SWiMNet: A scalable parallel simula-
tion testbed for wireless and mobile networks,” Wireless Networks, vol. 7, no. 5,
pp. 467–486, Sep. 2001.

BIBLIOGRAPHY 144
[49] Z. Ji et al., “Optimizing parallel execution of detailed wireless network simula-
tion,” Proc. of Parallel and Distributed Simulation (PADS), May 2004.
[50] X. Zeng, R. Bagrodia, and M. Gerla, “GloMoSim: a library for parallel simulation
of large-scale wireless networks,” Proc. of Parallel and Distributed Simulation
(PADS), May 1998.
[51] G. F. Riley, R. M. Fujimoto, and M. H. Ammar, “A generic framework for par-
allelization of network simulations,” Proc. of Symposium on Modelling, Analysis
and Simulation of Computer and Telecommunication Systems (MASCOTS), Oct.
1999.
[52] B. K. Szymanski et al., “Genesis: a system for large-scale parallel network sim-
ulation,” Proc. of Parallel and Distributed Simulation (PADS), May 2002.
[53] L. Bononi et al., “Performance analysis of a parallel and distributed simulation
framework for large scale wireless systems,” Proc. of Conference on Modeling,
Analysis and Simulation of Wireless and Mobile Systems (MSWiM), Oct. 2004.
[54] A. Ferscha, “Parallel and distributed simulation of discrete event systems,”
Handbook of Parallel and Distributed Computing, 1995.
[55] R. M. Fujimoto, Parallel and distributed simulation systems. John Wiley &
Sons, 2000.
[56] MVAPICH (MPI over InfiniBand) project. Network-Based Computing Labora-
tory, Dept. of Computer Science and Engineering, The Ohio State University.
[Online]. Available: http://nowlab.cse.ohio-state.edu/projects/mpi-iba/