Embed Size (px)
Citation preview

IEEE Wireless Communications • February 20092 1536-1284/09/$25.00 © 2009 IEEE
Gateway
Offloadingdata
Internet
Back end:Web server, database
Robot 2
WIRELESS CO M M U N I C AT I O N S I N RO B O T I C NETWORKS
INTRODUCTIONThe recent emergence of small embedded-sens-ing devices (also known as motes) will funda-mentally change the way we approach manyscientific problems, some of them that weretotally intractable in the past. One such family ofscientific problems collectively is known as envi-ronmental monitoring, in which scientists mustcollect environmental data (e.g., temperature,humidity, etc.) over long temporal and spatialscales [1]. Today, such experiments are infeasiblebecause they require significant manual laborand perturb the environment under observation.
With sensor network technology, scientists candeploy sensing motes close to the phenomenonthey want to observe and collect measurementsfrom the motes’ onboard sensors. Because themotes are physically small, battery-operated, andinclude a wireless radio, deploying such a wirelesssensor network perturbs the environment mini-mally and reduces the installation and mainte-nance costs. Furthermore, the inexpensive natureof these devices enables scientists to place a high-resolution mote grid in the field and obtain fre-quent measurements, providing an extremely richdata set about the dependencies and subtle differ-ences among many correlated parameters.
Nonetheless, multiple challenges remainbefore the promise of autonomous environmentalmonitoring can be fulfilled. Limited energy is one
of the key challenges because the motes are usu-ally battery operated. The mote’s wireless radio isits largest consumer of energy, with the possibleexception of its on-board sensors. The motes canspend the majority of their energy stores transmit-ting collected data, especially because they mightbe required to forward data for other motes in thenetwork. Moreover, considering that wirelesslinks are notoriously fickle and that scientistswant all of the collected data, retransmissions arelikely to increase the energy cost.
In this article we present an alternative to anend-to-end wireless network that forwards themotes’ measurements to a back-end database.We propose to use autonomous robots as datamules. These mules visit locations within thecommunication distance of each of the staticmotes, download their measurements, and returnto a remote base station to offload the collecteddata. The key benefit of this approach is thatmotes can conserve energy that otherwise theywould use to forward data, thereby prolongingthe lifetime of the network. However, to success-fully deploy such a hybrid robot/sensor network,new challenges (such as planning robot trajecto-ries) must be overcome.
The remainder of this article summarizesbackground information on environmental sen-sor networks, exemplified by a network wedeployed ,and presents the challenges associatedwith collecting data from remotely deployed net-works. Next, we describe how robots can assumethe role of data mules and the technical chal-lenges associated with this task. Finally, we pre-sent a proof-of-concept system that wedeveloped to explore the trade-offs in usingrobots as data mules.
RELATED WORK
The idea of exploiting mobility for data collec-tion and routing has received some recent atten-tion. In most of the existing work, data mulesare treated as uncontrolled agents. In this sec-tion, we present a brief overview of related workfocusing on controllable agents. Yuan et al. for-mulate the problem of collecting sensor datausing a single robot as a special instance of theTraveling Salesperson Problem with Neighbor-
ONUR TEKDAS AND VOLKAN ISLER, UNIVERSITY OF MINNESOTA
JONG HYUN LIM AND ANDREAS TERZIS, JOHNS HOPKINS UNIVERSITY
ABSTRACT
We explore synergies among mobile robots andwireless sensor networks in environmental moni-toring through a system in which robotic datamules collect measurements gathered by sensingnodes. A proof-of-concept implementationdemonstrates that this approach significantlyincreases the lifetime of the system by conserv-ing energy that the sensing nodes otherwisewould use for communication.
USING MOBILE ROBOTS TOHARVEST DATA FROM SENSOR FIELDS
Volkan Isler and Onur Tekdas were at Rensselaer Poly-technic Institute when this work was performed. Theirwork is supported in part by NSF IIS-0745537, NSF CCF-0634823, and NSF CNS-0707939.
The authors exploresynergies amongmobile robots andwireless sensor networks in environmental monitoring through a system in whichrobotic data mules collect measurements gathered by sensing nodes.
TEKDAS LAYOUT 1/20/09 4:21 PM Page 2

IEEE Wireless Communications • February 2009 3
hoods (TSPN), where each neighborhood is adisc whose center corresponds to a node andwhose radius is determined by the communica-tion range [2]. We present algorithms for multi-ple robots and focus on system challengesassociated with energy considerations. Tirta et al.presented algorithms to schedule visits of amobile agent to collect data from cluster heads[3]. The authors present heuristics that focus ondata latency and the data aggregation rate ofclusters. In our work, we focus on energy-effi-ciency issues. Another aspect that distinguishesour work from the previous body of work is thatwe present a proof-of-concept implementationusing robots and motes.
Some of the most closely related results arepresented in [4]. In that work, Dunbabin et al.present an underwater data muling system. Wefocus on a land-based system. The correspondingsystem designs reflect the challenges associatedwith the two scenarios. In the underwater sce-nario, sensors and underwater vehicles commu-nicate through optical communication, whichrequires a close proximity, as well as a goodviewing angle to start the communication. More-over, because global positioning system (GPS)localization is not available under water, thevehicle must navigate under high localizationuncertainty. This makes designing global routingalgorithms challenging. The authors propose asolution where the vehicle performs a spiralmovement to find the sensors. This strategy isnot efficient for our scenario, in which the sen-sor locations are known and the robot can local-ize itself. The authors present a realimplementation with three sensors and a singlerobot. We present global routing algorithms forlarger sensor networks that utilize multiplerobots (up to three).
BACKGROUND
A wireless sensor network (WSN) is a collectionof small embedded computing devices (motes)deployed over an area of interest, communicatingthrough wireless radios. These motes consist of amicrocontroller, data storage devices, sensors,analog-to-digital converters (ADCs), a datatransceiver, and an energy source (e.g., AA bat-teries). Existing motes use an 8- or 16-bit micro-controller with tens of kilobytes of RAM,hundreds of kilobytes of ROM for program stor-age, and external storage in the form of FLASHmemory [5]. These devices operate at one milli-watt while running at about 10 MHz. Most of thecircuits can be powered off, so the standby powercan be about one microwatt. If such a device isactive 1 percent of the time, its average powerconsumption is just a few microwatts, enablinglong-term operation, even with two AA batteries.Mote radios transmit at rates between 10–250kb/s; consume about 20 milliwatts when in trans-mit, receive, or idle listening mode; whereas theirrange typically is measured in tens of meters.
One of the most popular wireless sensor net-work applications is environmental monitoring[1, 6]. In its basic form, environmental monitor-ing involves reliably gathering the measurementsfrom each of the network motes. Furthermore,to observe long-term spatial and temporal trends,
these networks must be deployed for years andcover large geographic areas. These require-ments mean that such networks must have dutycycles of 1 percent or lower and be deployedsparsely over the monitored area.
One such network is a soil-monitoring net-work we deployed at the Jug Bay wetlands sanc-tuary. This sanctuary is located along thePatuxent River in Maryland and serves as thehabitat for a variety of turtle species, includingthe Eastern box turtle. These turtles are of sci-entific interest because their sex is not deter-mined by sex genes but by the incubationtemperature of the eggs. It was demonstrated inthe lab that a difference of two degrees centi-grade is enough to produce male instead offemale offspring. On the other hand, the in-vivoconditions of box turtle nests have not beenobserved in the wild. For this reason, wedeployed a mote network that monitors soil tem-perature and soil humidity in turtle nests.Because we have no control of where turtlesdecide to lay their eggs, our motes are spreadover a very large geographic area (approximately25 square kilometers).
DATA RETRIEVALIt is uneconomical to deploy an end-to-end envi-ronmental monitoring WSN over a large geo-graphic area because the range of individualwireless links is between 10 and 50 meters,depending on the environment. Consequently, alarge number of relay points is required for multi-hop data collection. Even if deploying such a net-work were economically viable, delivering datareliably over the network would consume consid-erable energy. This is because a single packetmust be transmitted multiple times by each moteon the routing path to the gateway. Furthermore,because wireless links are lossy, the probability ofloss (and thus retransmission) increases as thelength of the routing path increases. Finally, inaddition to the energy consumed to carry sensormeasurements, the motes must exchange controltraffic to maintain the end-to-end routing pathsused to forward data traffic, further depletingtheir limited energy stores.
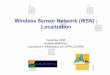
On the other hand, mobile robots can navi-gate the terrain, move physically close to each ofthe network motes and download their collectedmeasurements over a direct wireless link. Afterthe robots collect the desired data from the net-work, they return to the gateway where theyoffload them. We term the robots that collectand ferry data as data mules. Figure 1 graphicallydepicts the proposed system architecture. Thisarchitecture offers multiple advantages. First,data mules can move close enough to a mote toensure that the quality of the wireless link ishigh. Furthermore, because the robot movesadjacent to the mote, the mote can reduce itsradio transmission power, further reducing itsenergy consumption. Finally, recharging therobot batteries is a simpler operation than replac-ing mote batteries. At the same time, using datamules introduces its own set of challenges, whichwe outline in the section that follows.
One of the mostpopular wireless sensor network applications is environmental
monitoring. In itsbasic form,
environmental monitoring involves
reliably gathering themeasurements from
each of the network motes.
TEKDAS LAYOUT 1/20/09 4:21 PM Page 3

MOBILE ROBOTS AS DATA MULES
NODE WAKEUP AND DATA EXTRACTIONAs previously mentioned, sensing motes usuallyhave their radios turned off to conserve energy.Then, to check for any pending requests, eachsensing mote transmits a beacon and waits foran acknowledgment. If no acknowledgmentarrives, the mote turns off its radio; otherwise itremains active waiting for data-downloadrequests. This low-power probing (LPP) mecha-nism initially was proposed in [7]. By controllingthe beacon frequency, the node can control itsduty cycle. For example, selecting a beaconinginterval of 20 seconds leads to a ~ 0.1 percentduty cycle, as a beacon-acknowledgment cyclelasts 20 msec.
Based on this description, the robot movesclose to the sensing mote, waits for a beaconmessage, acknowledges it, and then issues acommand to the mote to download (some of) itsdata. We can further reduce the energy con-sumption of the mote if the schedule of therobot visits is known. In this case, the robotinforms the mote when it will return. The motethen broadcasts its beacons only shortly beforeand shortly after the robot is expected to return.Doing so reduces the energy consumed to sendthe beacons at the cost of reducing system flexi-bility (the robot can arrive only during pre-described times). If the mote loses the robotschedule (e.g., after an unexpected reboot oper-ation), it can fall back to its periodic probingschedule.
An alternative wake-up strategy is to use alower-power sensor to wake up the node. Forexample, one could use the mote’s light sensorsor even a Reed switch (i.e., an electrical switchoperated by an applied magnetic field) to wakeup the mote. In this case, the robot could shine alight or carry a magnet that would activate thesensor that in turn activates the sensing mote’sradio for the subsequent download. Once themote is awake, the robot transmits a request con-
taining the range of collected data it requires todownload from the mote. The actual data-down-load process uses the standard NACK-basedAutomatic Repeat reQuest (ARQ) protocol.
LOCATION INFORMATIONThroughout this work, we assume that accuratelocation information, for both robots and motes,is available. For most applications, it is reason-able to assume that robots can self-localize at alltimes. Specifically, robots can use GPS whenoutdoors, whereas in indoor environments, inwhich visual features abound, vision-based local-ization techniques can be utilized. Likewise, onecan assume that robots have complete and accu-rate knowledge of the mote locations becausethese locations can be recorded during thedeployment process. Nonetheless, in the para-graphs that follow, we briefly discuss how thisassumption can be relaxed.
The accuracy of off-the-shelf GPS devices isbetween 3–5 m, whereas differential GPS devicesreduce the error to ~ 20 cm. A communicationlink between a mote and a data mule in thepresence of location uncertainties can be estab-lished by using a longer communication range.For example, suppose we are using a GPS devicewith a ~ 3-m localization error. Further, let ussuppose that the locations of the motes wererecorded using this device and that the robotuses an identical GPS for navigation. In thiscase, we can set the communication range of themotes to ~ 6 m. This guarantees that even if amote and a robot are at the opposite sides oftheir uncertainty region, they can still establish aconnection. On the other hand, increasing thecommunication range does not guarantee error-free communications due to multipath interfer-ence. Currently, we are investigating efficientalgorithms to overcome this issue by using robotmobility to find locations within the mote’s com-munication range that ensures low packet loss.
Moreover, if the locations of motes are notknown, an interesting network discovery prob-lem arises in which a discovery phase is imple-mented. During this phase, motes periodicallytransmit beacons while the robots cover theenvironment. When a robot listens to a beacon,it learns an approximate estimate of the mote’slocation (or range), which it can propagate tothe other cooperating robots. Recently, similarspatial coverage problems received significantattention in the robotics literature. However, thenetwork discovery problem mentioned previouslyhas a temporal aspect as the motes’ messagesarrive at discrete time-steps. This calls for thedesign of new spatio-temporal coverage algo-rithms that guarantee that all motes are discov-ered as quickly as possible.
ROBOT ROUTINGThe task of collecting sensor data with mobilerobots introduces a number of challenging path-planning problems, related to fundamental vehi-cle routing problems. In the most basic form ofthe problem, we have a single robot that mustvisit mote locations as quickly as possible. This isthe well-known Traveling Salesperson Problem(TSP) that requests the shortest route for asalesperson (the robot) to visit a set of cities (the
IEEE Wireless Communications • February 20094
n Figure 1. Overall system architecture, including a number of sensing motes,multiple robots acting as data mules, and a gateway to which robots offloadcollected data and receive further commands. Each robot communicates withthe sensing nodes and the gateway through a locally connected mote. All col-lected data are eventually stored in a back-end database for further processingand visualization.
Downloadingdata
Sensing mote:temperature, humidity, etc.
Robot 1
Gateway
Offloadingdata
Internet
Back end:Web server, database
Robot 2
TEKDAS LAYOUT 1/20/09 4:21 PM Page 4

motes). In the open field, data aggregation withrobots corresponds to a special case of TSP,called the Euclidean TSP, where the edge costbetween two nodes is equal to their Euclideandistance. Efficient approximation algorithms forEuclidean TSP exist in the literature [8].
For one data mule, a TSP tour gives an opti-mal strategy to collect the motes’ data. However,one can increase the aggregation frequency andreduce the distance the mule travels, by employ-ing multiple data mules and splitting the tourover the number of data mules. Computing toursfor k agents is known as the k-TSP problem [9].An optimal k-TSP solution finds k tours, wherethe largest of k tours is minimized. Because therobots in our system establish wireless connec-tions with the sensors, a robot is not required totravel all the way to the location of a sensor todownload its data. This capability can be mod-eled as a TSP with Neighborhoods (TSPN) prob-lem. In TSPN, each customer is willing to travela certain distance to meet with the salesperson.This corresponds to finding the shortest routevisiting a given set of discs on the plane (Fig. 2a).
So far, we focused on designs in which motesare assigned to robots, and the robots are usedprimarily for data collection. In some scenarios,it is possible to improve the system performance(e.g., latency) and limit the robots’ energy con-sumption by enabling multi-robot collaboration.One such scenario is when the gateway locationis significantly further away from the sensors. Inthis case, instead of having robots visit the gate-way periodically, some robots can act as roboticrouters [10] and relay messages to the gateway.Doing so significantly reduces the time spenttraveling (Fig. 2b).
Although approximation algorithms exist forthe standard TSP variants, additional require-ments must be introduced to model the temporalaspects of the data gathering application. Forexample, the size of a mote’s memory introducesan upper bound on the length of the timebetween consecutive visits of the robots to themote. Furthermore, when motes do not constant-ly transmit beacons, synchronizing the arrival of arobot and a mote’s wake-up time requires intro-
ducing time windows within which the robot mustarrive at the sensors. Recent results about varia-tions of the data-gathering problem with timeconstraints can be found in [11].
PROOF OF CONCEPT
Next, we present a proof-of-concept system thatwe developed, as well as results from a smallexperiment that proves the feasibility of usingmobile robots as data mules.
Our proof-of-concept consists of a network ofsensing motes and a number of mobile robots.Each sensing mote is a Tmote Sky from Moteiv[5]. Moreover, each of the Acroname Garciarobots has a Stargate personal digital assistant(PDA)-class single-board computer that controlsthe robot motors and sensors (Fig. 3). The Star-gate uses a Tmote Sky mote — directly connect-ed to its universal serial bus (USB) interface —to communicate with the sensing nodes. Thecommunication between the mote and therobot’s computer follows a simple command-and-response protocol that we developed. Afterthe robot approaches a sensing node, it waits fora beacon message to verify that the node is stillalive. After it receives the beacon, the robot ini-tiates the data download process. If on the otherhand, a beacon is not received within a predeter-mined amount of time, the robot proceeds to thenext sensing mote on its path.
We assume that the transmission power ofthe motes is set to its lowest level to reduceenergy consumption. Hence, while planning thetrajectories of the mules, we set the visiting loca-tions to be the exact locations of the motes. Thetrajectories of the multi-robot system are precal-culated as k-TSP tours. Figure 4 illustrates theresulting k-TSP tours for k = {1, 2, 3} on a reg-ular grid where twelve motes are deployed. Forthis small TSP instance, we find the optimal TSPtour by enumeration, which is feasible for thisrather small network. For larger problems, effi-cient TSP solvers can be used. To compute the2-TSP and 3-TSP tours, we split the optimal TSPtour into smaller tours using the k-SPLITOURalgorithm [9].
IEEE Wireless Communications • February 2009 5
n Figure 2. Two alternative download strategies. The small dark blue circles correspond to motes, while the larger light blue circles correspond to the transmission region of a mote. In reality the transmission range isof course not circular, but robots can move close enough to the motes to avoid any RF propagation irregu-larities. a) Each robot visits a location within the transmission range of their assigned motes, uploads themeasurements, and returns to the gateway. b) The robot that uploads the data from the motes is connectedto gateway through a mobile relaying node (another robot). This approach may be advantageous when themote locations are far away from the gateway.
(a) (b)
Gateway Gateway
The task of collectingsensor data with
mobile robots introduces a numberof challenging prob-lems, related to fun-
damental vehiclerouting problems. Inthe most basic formof the problem, wehave a single robot
that must visit motelocations as quicklyas possible. This is
the well-known Traveling
Salesperson Problem.
TEKDAS LAYOUT 1/20/09 4:21 PM Page 5

IEEE Wireless Communications • February 20096
We illustrate the practical feasibility of datagathering using data mules with a small-scaleexperiment. For this experiment, we deployedtwelve motes and a gateway on a virtual grid ona basketball field at the Rensselaer PolytechnicInstitute (Fig. 5a). The robot system we devel-oped for the experiment follows a step-by-stepprocedure. In each step, a robot takes a turn ortakes a forward step for a length of a maximumof 7 m. We limit the length of each step to limitthe deviation of the robot from its designedpath. Such deviations occur due to the inherentlimits of the accuracy of the robot’s motors. Thegoal of this experiment is not to evaluate theaccuracy of indoor localization techniques andautonomous repositioning; therefore we manual-ly re-position the robots to correct the position ifthey veer off the desired path. In total, we con-ducted three experiments with one to three datamules. Figure 4 shows the trajectories of therobots for each of the three experiments, andFig. 5b shows a snapshot from the experimentwith two data mules.
EVALUATION
As described previously, one key reason forusing data mules is to reduce the energy con-sumption of the sensing motes — and thus, pro-long the lifetime of the network — whileguaranteeing reliable data collection. We quanti-fy this benefit by comparing the energy con-sumed to send a single packet from each mote intwo settings. In the first setting, an end-to-end,multihop wireless-network system is used to col-lect the data. In the second setting, sensingmotes directly offload their packets to datamules as proposed in this article. We simulatethis comparison based on a grid of 12 moteswhose pattern mirrors the 3 × 4 grid that wedeployed on the basketball court. The deploy-ment is shown in Fig. 5a. In addition, we makethe following assumptions. First, we assume thateach mote can communicate only with its directneighbors on the grid, and therefore the longestend-to-end network path spans four wirelesslinks. Second, each packet can be lost with prob-ability p, which is uniform across all of the linksof the network. Finally, we use a hop-by-hopretransmission scheme, in which case each noderetransmits the packet if it does not receive anacknowledgment from its upstream neighbor.
Given these assumptions, we calculate thesum of the expected number of transmissions(ETX) that are required to enable each of the12 motes to deliver a single packet to the gate-way successfully. Based on the end-to-end rout-ing tree overlaid on the mote grid, the aggregateETX is equal to 30 when p = 0 (i.e., no packetloss). On the other hand, when data mules areused, the aggregate ETX is equal to 12 becauseeach mote can offload its packet directly to amule over a short and reliable wireless link.Although the benefits of using data mules areclear even with error-free radio links, as Fig. 6asuggests, the disparity rapidly increases as pincreases. Furthermore, this estimate assumesthat the gateway can directly communicate withsome of the motes in the network. In reality,however, the gateway might not be in the com-munication range of the sensing motes, in whichcase one or more relay points are required.Adding relay points, however, increases thelength of the end-to-end path and thus furtherincreases the ETX.
The second benefit of using data mules isthat motes can decrease their transmission powerand thus save energy. Figure 6b supports thisclaim, showing that if a mote reduces its trans-mission power level from its default level of 1mW (0 dBm) to 0.003 mW (–25 dBm), the ener-gy consumption is reduced drastically. Further-more, because the mules can approach the
n Figure 4. From left to right: optimal TSP tours for one, two, and three data mules. The squares representthe gateways, and the circles represent mote locations.
Gateway Gateway Gateway
n Figure 3. An Acroname Garcia robot visiting a sensing mote. Note the singleboard computer on the robot under the clear lid and the mote connected tothe robot’s computer.
TEKDAS LAYOUT 1/20/09 4:21 PM Page 6

IEEE Wireless Communications • February 2009 7
sensing motes reliably at a close distance, reduc-ing the transmission power does not increase theprobability of loss.
In addition to estimating the energy that thesensing motes consume, we also consider theenergy consumption of the robot. Because robotbatteries also are limited, yet rechargeable ener-gy sources, we must consider how long the bat-teries last when we dispatch the robots to collectdata. If the network is too big and therefore thetour is too long, the energy stored in a singlerobot battery might not be sufficient to completea single tour. In that case, we can split the singletour until we get tours that each robot can com-
plete feasibly at least once before recharging itsbattery. Even if a single robot can tour the wholenetwork, we must be able to predict how manytours it can complete before it must recharge itsbattery. Hence, accurately estimating the energyconsumption of the robot is a prerequisite forthe correct operation of the data muling system.
Each of the robots we use is powered by astandard, six-cell 7.6 V 3,000 mAh NiMH batterypack. The current drawn from the battery variesdepending on the activity of the robot. We clas-sify these activities by three states: standby, mov-ing, and downloading/uploading data. Wemeasured the minimum and maximum current
n Figure 5. The map of our deployment (left) and a snapshot from the experiment with two mules (right): a)A map of the deployment area. The deployment consists of 12 motes (blue circles) and a gateway (redsquare), placed on a grid that spans a quarter of a basketball court. b) A snapshot from the experiment withtwo mules. One mule (white robot) is following its designed path, while the other mule (red robot) is down-loading data from the assigned mote.
(a) Map of the deployment area. The deploymentconsists of twelve motes (blue circles) and a gateway(red square), placed on a grid that spans a quarter ofa basketball court.
(b) A snapshot from the experiment with twomules. One mule (white robot) is following itsdesigned path while the other mule (red robot)is downloading data from the assigned mote.
13.2m
7.3m
n Figure 6. Using data mules reduces the sensing mote's energy consumption in two ways: by reducing the total number of transmissionsnecessary to deliver measurements to the database and by reducing the sensing motes' transmission power: a) Total number of expectedtransmissions for a 3 × 4 grid as a function of packet loss probability p. Each mote delivers a single packet to the gateway. The differentlines correspond to grids that require zero to two relay points to connect to the network’s gateway. b) Current consumed by the mote’sradio (TI Chipcon CC2420) as a function of transmission power.
Loss rate (%)
(a) (b)
1000
50
Agg
rega
te e
xpec
ted
num
ber
of t
rans
mis
sion
s (E
TX)
100
150
200
250
300
20 30 40 50 60 70 80Power (dBm)
–25
0
Cur
rent
con
sum
ptio
n (m
A)
5
10
15
20
–20 –15 –10 –5 0
No relay point1 relay point2 relay point
TEKDAS LAYOUT 1/20/09 4:21 PM Page 7

IEEE Wireless Communications • February 20098
values for each of these three states experimen-tally. The measured values are 560 ~ 620 mA(standby), 630 ~ 940 mA (moving), and 590 ~750 mA (download/upload).
During our experiments, robots had an aver-age speed of 0.2 m/sec. Downloading 11.4 kbytesof data from each mote took one minute onaverage, which consists of 20 seconds beaconingand the actual data download time. In the firstexperiment, the trajectory length for one datamule was 46.2 m. The total time used by therobot to follow the trajectory, download datafrom the motes, and upload to the gateway was16:51 min. In the second experiment, we usedtwo robots where the robot trajectory lengthswere 35.5 m and 34.7 m. The total times were9:56 min and 9:57 min, respectively. Finally, inthe third experiment, we used three robots withtrajectory lengths of 30.5 m, 30.6 m, and 29.3 m.The total times in that case were 8:33 min, 5:33min, and 8:26 min, respectively.
When calculating the energy consumption, weconsider the maximum measured current values.According to this assumption, the robot con-sumed 1.69 Wh in the first experiment. In thesecond experiment, both robots consumed 1.02Wh, whereas in the third experiment, robotsconsumed 0.87 Wh, 0.59 Wh, and 0.86 Wh,respectively. Then, one can use these estimatesand the battery capacity (22.8 Wh) to determinehow many tours the robots can complete beforethey must recharge their batteries.
DISCUSSION
Wireless sensor network technology has thepotential to enable major breakthroughs in thenatural sciences by giving scientists the capabilityto collect high-fidelity data over large geographicregions and extended periods of time. We arguethat mobile robots can help sensor networksachieve their full potential. In this article, weexplored one such synergy between robots and astatic sensor field, in which robots act as mulesthat collect the measurements acquired by thesensors. We used a proof-of-concept system toshow that this approach is feasible and yieldsimportant savings in energy costs, thus prolong-ing the lifetime of the network.
A number of improvements are requiredbefore our system can be fully autonomous.Specifically, we are currently extending the local-ization capabilities of our robots by implement-ing vision-based localization techniques. Formotion planning, we plan to improve our systemin two ways:• Currently, our robots visit the exact location of
the motes. We are planning to utilize thecommunication range of the motes by imple-menting TSPN-based approaches in routeplanning.
• In our current approach, each mote is assignedto a single robot for data download. We alsoplan to investigate the utility of enabling mul-tiple robots to visit a single mote (at differenttimes), as well as enabling robots to hand offcollected data.In the long run, we expect to perform out-
door experiments with real applications. Thisrequires more sophisticated robots capable of
navigating outdoor terrains.
REFERENCES[1] R. Musaloiu-E. et al., “Life under Your Feet: A Wireless
Sensor Network for Soil Ecology,” Proc. 3rd EmNetsWksp., May 2006.
[2] B. Yuan, M. Orlowska, and S. Sadiq, “On the OptimalRobot Routing Problem in Wireless Sensor Networks,”IEEE Trans. Knowl. Data Eng., vol. 19, no. 9, 2007, pp.1252–61.
[3] Y. Tirta et al., “Efficient Collection of Sensor Data inRemote Fields Using Mobile Collectors,” Int’l. Conf.Comp. Commun. Net., Oct. 2004, pp. 515–19.
[4] M. Dunbabin et al., “Data Muling over UnderwaterWireless Sensor Networks Using an Autonomous Under-water Vehicle,” IEEE Int’l. Conf. Robotics Automation,May 15–19, 2006, pp. 2091–98.
[5] J. Polastre, R. Szewczyk, and D. Culler, “Telos: EnablingUltra-Low Power Wireless Research,” Proc. 4th Int’l.Conf. Info. Processing Sensor Net., Special Track onPlatform Tools and Design Methods for NetworkEmbedded Sensors, Apr. 2005.
[6] L. Selavo et al., “LUSTER: Wireless Sensor Network forEnvironmental Research,” Proc. 5th ACM Sensys Conf.,Nov. 2007.
[7] R. Musaloiu-E., C.-J. M. Liang, and A. Terzis, “Koala:Ultra-Low Power Data Retrieval in Wireless Sensor Net-works,” Proc. 7th Int’l. Conf. Info. Processing SensorNet., Apr. 2008.
[8] S. Arora, “Polynomial Time Approximation Schemes forEuclidean Traveling Salesman and Other GeometricProblems,” J. ACM, vol. 45, no. 5, 1998, pp. 753–82.
[9] G. N. Frederickson, M. S. Hecht, and C. E. Kim, “Approx-imation Algorithms for Some Routing Problems,” SIAMJ. Comp., vol. 7, no. 2, 1978, pp. 178–93.
[10] O. Tekdas and V. Isler, “Robotic Routers,” Proc. IEEE Int’l.Conf. Robotics Automation, May 2008, pp. 1513–18.
[11] N. Bisnik, A. Abouzeid, and V. Isler, “Stochastic Event Cap-ture Using Mobile Sensors Subject to a Quality Metric,”IEEE Trans. Robotics, vol. 23, no. 4, 2007, pp. 676–92.
BIOGRAPHIESONUR TEKDAS ([email protected]) is a Ph.D. student in theComputer Science Department at the University of Min-nesota. He obtained his M.S. degree in computer sciencefrom Rensselaer Polytechnic Institute. He received his B.S.degree in computer engineering from the Middle EastTechnical University, Ankara, Turkey. His research interestsare robotics and sensor networks.
JONG HYUN LIM ([email protected]) is a Ph.D. student in theDepartment of Computer Science at Johns Hopkins Univer-sity and is also a member of the Hopkins InterNetworkingResearch Group (HiNRG) led by his advisor, Dr. AndreasTerzis. His research interests include a variety of topics forwireless sensor networks, such as protocol design, dataanalysis, and target localization.
ANDREAS TERZIS ([email protected]) is an assistant professorin the Department of Computer Science at Johns HopkinsUniversity, where he heads the Hopkins InterNetworkingResearch (HiNRG) Group. His research interests are in thebroad area of wireless sensor networks, including protocoldesign, system support, and data management. He is arecipient of the National Science Foundation (NSF) CAREERaward.
VOLKAN ISLER ([email protected]) is an assistant professor inthe Computer Science Department at the University of Min-nesota. Previously, he was an assistant professor at Rensse-laer Polytechnic Institute and a postdoctoral researcher atCITRIS at the University of California, Berkeley. He obtainedhis M.S.E. (2000) and Ph.D. (2004) degrees in computerand information science from the University of Pennsylva-nia. He obtained his B.S. degree (1999) in computer engi-neering from Bogazici University, Istanbul, Turkey. Hisresearch interests are in robotics, sensor networks, andcomputer vision. In 2008 he received the NSF Young Inves-tigator Award (CAREER). His research interests are inrobotics, sensor networks, and computer vision.
Wireless sensor network technologyhas the potential toenable major breakthroughs in thenatural sciences bygiving scientists thecapability to collecthigh-fidelity dataover large geographic regionsand extended periods of time.
TEKDAS LAYOUT 1/20/09 4:21 PM Page 8