Embed Size (px)
Citation preview

Chapter 5
Self-organization of Ad Hoc Networks: Concepts and Impacts
5.1. Introduction
Mobile ad hoc networks (MANET) are based on node collaboration to provide network services such as unicast and multicast routing, localization, flooding, etc. Due to this, ad hoc networks appear as self-organized systems: no central entity is required in the network’s behavior and global behavior emerges from local interactions. In this chapter we discuss self-organization from the viewpoint of a self-organized structure with the purpose of supporting and improving the behavior of protocols and services for ad hoc networks.
The underlying objective of ad hoc networks is for each node to collaborate with its neighborhood to implement new networking protocols such as routing or flooding. Nevertheless, this collaboration is often done independently of intrinsic node properties. In this way, a high mobility node can participate in the development of a route and, because of its mobility, can quickly lead to a break in the route. Similarly, low energy level nodes can also participate in the networking protocols instead of preserving their resources as they should. In most studies, a MANET network does not consider node heterogenity and does not attempt to take advantage of its properties. In addition, MANET networks are mainly considered to be flat and are neither structured nor hierarchized.
Chapter written by Fabrice THEOLEYRE and Fabrice VALOIS.
wireless Ad Hoe and Sensor Networks Edited by Houda Labiod
Copyright 0 2008, ISTE Ltd.

82 Wireless Ad Hoc and Sensor Networks
Self-organization, as discussed here, is designed to take advantage of node properties in order to bring out a structure for network organization. This structure must be autonomous and dynamic in such a way that local change will only lightly affect the global structure. Using this self-organization structure must facilitate networking protocol deployment. The notion of local decisions and interactions will be the fundamental principles of this self-organization. Consequently, we are expecting properties of dynamic environment adaptation and robustness, and of course this localized concept will lead to a better scalability than by using centralized or distributed solutions.
First, we start by defining concepts inherent to self-organization in a more precise manner. Next, we will then look at more traditional self-organization approaches and will explain in more detail a solution based on the notion of virtual topology. From this self-organization solution, we will study the effects that self-organization can have on network behavior. More precisely, we will look at how basic services such as routing can be influenced by a self-organization scheme. Finally, we will propose extended works to apply the notion of self-organization.
5.2. Self-organization: definition and objectives
5.2.1. Definition
A system is said to be organized if it has a structure and a set of associated functions. The goal of the structure is to organize all entities and enable their interactions. The objective of the associated functions is to maintain the structure and, according to its use, respond to determined needs. The notion of self-organization refers to the organization of a system without interaction with any external entity and no centralized control. Because of this, self-organization must absolutely be based on local interactions, in a completely distributed manner.
5.2.2. Principles and objectives
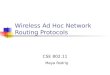
Still, we expect more from a self-organized system than simple local interactions with no external control. We particularly wish to bring out a global behavior from different local interactions. Typically, and in the case of ad hoc networks, from the exchange of localized information, we want to bring out a virtual structure to organize the network. Two types of virtual structures may interest us: clusters and backbones (including mesh networks and trees) (see Figure 5.1). We can then build two network views: a local microscopic view, representing node dynamics and a global view, with properties that we will discuss in more detail later in this chapter.

Self-organization of Ad Hoc Networks 83
We must obviously ensure that the global view is constructed in a limited time and is coherent
This emerging structure must obviously adapt to the environment and react to local changes. More precisely, a local change must only result in a local modification of the structure and not impact on its entirety. This dynamic reaction to local changes in a sufficiently short time leads to the property of adaptability. The system then appears to be robust: the new structure (macroscopic view) is stable because the self-organization mechanism will make it possible to react to a link or a node failure (due to mobility, insufficient energy, etc.): the structure will adapt and rebuild locally. Since there is no central entity, there are no critical nodes in a self-organized system and the system can repair itself without outside help. We group adaptability and robustness properties in the same term of self-stabilization [SCH 93] where failures are associated with links and nodes.
Figure 5.1. Different types of self-organizing structures
If we consider self-organization from the point of view of a stable topology to federate the ad hoc network, this topology emerging from local interactions must be shared by all nodes. In other words, we must prevent any source-oriented construction such as the use of OLSR’s MPRs (multipoint relay) for example, and we should propose a common self-organization structure to all network nodes. Since this logical structure will be based on physical nodes, these more important nodes will be more implied to implement network services. In this type of self-organization, it is necessary to make sure these nodes participate in turn.
Finally, the last important property that a self-organized structure must possess is scalability: even with a large number of nodes, the system must continue to function efficiently. This property comes from the lack of centralized control and the use of local interactions only. A too large number of network nodes must not cause congestion.

84 Wireless Ad Hoc and Sensor Networks
Finally, the properties that a self-organization schema must have are:
– only local interactions;
– emergence of a global structure from local information;
– responsiveness to local changes and robustness;
– self-organizing structure that is not source-oriented;
– scalability.
The notion of self-organization takes on its full meaning with ad hoc and sensor networks. It provides an environment enabling node configuration and the implementation of communications protocols. In a self-organized network, human intervention is reduced to a minimum, facilitating its deployment.
Self-organization must therefore bring out global behavior. In essence, an ad hoc network can be considered as a self-organized system because all protocols used are based on local interactions between the nodes and are distributed over network members. From our point of view, the idea is to provide a dynamic and unique virtual structure to facilitate deployment of any network service, instead of being limited only to address configuration or routing protocol.
5.2.3. Local or distributed decisions?
Our notion of local refers to the neighborhood of a node and to the partial, local view that it has of the network. In a self-organized structure, it is preferable that decisions be made with the help of a strictly local process based on information and local interactions instead of in a distributed manner. Let us review the difference:
– a process is localized if each node makes a decision based on (local) information that it has, or on the (partial) view that it has of the network;
– from a distributed point of view, several nodes can interact and converge towards a decision. The decision taken no longer comes only from local information but also from distributed information.
Choosing a local strategy is to choose to minimize known information in the network, to prevent the formal cost of synchronizing decisions and to react more quickly to local changes.
Now that we have defined self-organization and its associated properties, we will look at rules for developing a self-organized system.

Self-organization of Ad Hoc Networks 85
5.3. Some key points for self-organization
[PRE 05] studies key self-organization principles. We retain the main properties in order to build a self-organizing structure. It is necessary to define rules and protocols necessary to take advantage of the interaction between network nodes. Four paradigms will be studied:
– emergence of global behavior from local rules;
– local interactions and node coordination;
– minimizing network state information;
– dynamically adapting to the environment.
5.3.1. Emergence of global behavior from local rules
We focus on the development of a network protocol providing global properties such as connectivity, robustness, etc. The centralized approach proposes the use of a node dedicated to this protocol or service. With self-organization, this function must be shared by all network nodes. No entity can set the desired function, but each node must contribute to the creation of a global behavior. It is therefore necessary to develop local rules leading to a global behavior. Routing protocols in ad hoc networks illustrate this paradigm: the global behavior is forwarding a data packet from a source toward a destination whereas the local rule is to transfer the packet to a neighbor.
What local behaviors can lead to a global behavior? Locally, each node will collect information which will be aggregated and broadcast to the neighborhood. Global view is not required and local knowledge will be enough to create a global behavior. This is actually what happens with distance vector routing protocols such as DSDV [PER 94].
The construction of a local view and the implementation of local interactions are the first two main points of self-organization. We should note that when a global view emerges, it is not necessarily exact but tends to be close. From our point of view, not having a perfect solution in this very dynamic context is not a major drawback: since the network topology changes frequently, the ideal solution also evolves and represents a significant cost.
Basing global protocols and services on local interactions and information makes these protocols much more robust and stable since there are no critical nodes and the network does not change states abruptly, and local state changes only have a local reach. Nevertheless, since each node only has a local view of the network, this can lead to inconsistencies in the network. This is the object of the second paradigm.

86 Wireless Ad Hoc and Sensor Networks
5.3.2. Local interactions and node coordination
The result of local decisions can lead to inconsistent situations. In the case of address auto-configuration, this inconsistency leads to conflict situations: two nodes can have the same address following local decisions. To avoid this phenomenon, the first solution is to use explicit coordination. Nevertheless, this type of solution exhibits a huge networking overhead because it may require the implementation of an address detection mechanism for example. This type of coordination responds well to centralized systems.
With ad hoc networks, the use of explicit coordination cannot be applied due to limited radio resources and the network’s dynamic, because information must be constantly updated and radio resources are limited. Tolerating conflict may be necessary here. They are adequate if they are local, temporary, easily detectable and solvable. The notion of implicit coordination must also be used. The idea is to use all information circulating in the local neighborhood in order to detect and update inconsistencies. Conflict detection will also help in locally refining the network view and to improve inconsistent situations.
This second paradigm is obviously connected to the first one. The implementation of local rules will enable the emergence of a global behavior. Based on these local interactions, a global service with some inconsistencies will be implemented. Through these interactions, neighborhood information will be exchanged, in order to update topology or address information, resolving partial but erroneous views of the network and its associated service.
5.3.3. Minimizing network state information
With general networks, each node maintains an information list on the state of the network, for example: gateway, servers (DNS, security), etc. This information known by all nodes must remain consistent and we must use a synchronization mechanism. We could say that as network state information becomes more important, it will become less easy to turn to the concept of self-organization (see section 5.3.2).
In the case of ad hoc networks, it is necessary to use adaptive mechanisms for the maintenance and information discovery on the state of a network. As with routing protocols, [PRE 05] proposes two methodologies: a reactive and a proactive approach. In the first case, a node will make an explicit request relayed in multicast or broadcast, whereas in the second case, periodic announcements are made to broadcast this information. Once more, the self-organization mechanism makes the network more reactive and robust to configuration changes and to critical situations. The dependence on central information is also avoided.

Self-organization of Ad Hoc Networks 87
5.3.4. Dynamic environment adaptation
The last rule that must be created in self-organized networks is the capacity to react to network topology changes and to information changes, resulting from mobility and/or node failure. Since no centralized entity can broadcast a change of state, each must monitor its local behavior and react accordingly. Monitoring its local neighborhood is linked to paradigm 1 and reacting to new information is linked to paradigm 2.
[PRE 05] identifies 3 adaptation levels:
– 1st level: adaptation to topology changes resulting in the mobility or appearance/disappearance of a node;
– 2nd level: adaptation of conventional parameters (timers, knowledge of k neighborhood, etc.) based on state changes for improving network behavior;
– 3rd level: a self-organized system must be able to realize that the environment in which it evolves will not lead to a stable system and thus, must replace one mechanism with another.
These adaptations can be combined with adaptive control. We must weigh these adaptation mechanisms: a local state change must only lead to a local change and must not affect the complete network topology.
We will describe below the most relevant structures from a self-organization viewpoint, considering self-organization as the emergence of a topology for structuring the network. Next we will focus on a solution to implement self-organization principles and study what self-organization brings to network behavior.
5.4. Self-organization: a state of the art
5.4.1. Classification
Two types of virtual structures can be considered: (virtual) backbone structures (tree, trellis) and clusters (see Figure 5.1).
To structure an ad hoc network in the form of a tree leads to high hierarchization of the topology and nodes which can be used by network services. On the other hand, associated robustness is weak. A trellis topology (also known as a mesh network) has the advantage of link redundancy ensuring its robustness. On the other hand, with the goal of using organization to improve network behavior, the use of a trellis-based structure results in the existence of multiple loops that must be managed in the protocol. Finally, clusters enable network partitioning and can

88 Wireless Ad Hoc and Sensor Networks
possibly structure the network depending on location, a metric of density or connected to a service, etc.
We will now present tree and trellis topologies leading to the development of a virtual backbone and we will explain cluster-based solutions.
5.4.2. Virtual backbone
The idea of organizing an ad hoc network into a backbone comes from an analogy with wired networks. This type of structure federates nodes around a backbone, provides development support for network services and can serve as a natural link for a fixed network interconnection.
We are presenting here the main virtual backbone development techniques in ad hoc networks by successively studying the following structures: CDS (connected dominating set), RNG (relative neighborhood graph), LMST (localized minimum spanning tree), etc. Note that these topologies are also used in the area of wireless sensor networks in the context of topology control. Before going any further, we will introduce a few notations from graph theory.
Figure 5.2. Modeling of ad hoc network as graphs

Self-organization of Ad Hoc Networks 89
5.4.2.1. Notations
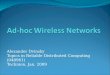
Graph theory forms a tool that is well adapted for modeling ad hoc networks. A network is modeled by a graph and an edge exists between two vertices if both terminals are neighbors (see Figure 5.2) in the physical topology. We will use the following notations:
– G(V,E): graph associated with the ad hoc network, with all vertices V and all edges E;
– Nk(u): k-neighborhood of vertex u, i.e. all nodes at less than k hops from u. By convention, N1(u) = N(u);
– routeu1→uk: all vertices {u1,...,uk} as well as edges (ui,ui+1)i∈[1..k-1] exist. k is called route length.
5.4.2.2. Connected dominating set
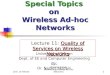
A connected dominating set (CDS) is defined by a node that is either a dominatee or dominator, while a dominatee is a neighbor of at least one dominator and the dominators are connected (see Figure 5.3). By definition, a CDS is the set V’ of G(V,E) vertices such that:
, '/ ( )u V v V v N u∈ ∃ ∈ ∈∀ [5.1]
2,( , ) ' , / , 'u vu v V c route w c w V∈ ∃ = ∃ ∈ ∈∀
The notion of CDS can be extended to the notion of k-CDS, by modifying proposition [5.1]:
, '/ ( )ku V v V v N u∈ ∃ ∈ ∈∀

90 Wireless Ad Hoc and Sensor Networks
Figure 5.3. Topology – connected dominating set
We call MCDS a CDS of minimum cardinality. Small size is an important asset for ad hoc networks without being a critical element. However, since centralized construction of an MCDS is an NP-hard problem, numerous algorithms use heuristics to approximate an MCDS, in particular in a distributed context.
Many studies propose the construction of an MCDS in two steps. The first would enable the election of dominator nodes, in such a way that any dominatee would be neighbor to a dominator. The set thus formed is a dominating set. Subsequently, the dominating set is connected by minimizing cardinality of the final set. A node can be any of the states: dominating, dominatee, active (in election process) or isolated (in initialization).
In [BUT 03, CAR 02, CHE 02, LIA 00], a leader is declared dominant. Its neighbors become dominatees, and dominatee neighbors become active. The active node with the highest weight at the end of the round becomes dominant. In this topology, two dominators are separated by 2 hops. Different weights are used as an

Self-organization of Ad Hoc Networks 91
election metric: the highest degree [BUT 03, LIA 00], the lowest address [CAR 02] or a generic weight [CHE 02]. [ADJ 05] proposes the construction of a CDS based on OLSR’s multipoint relay.
[DAI 03, WU 99] proposes an algorithm of CDS construction using only local information (see Figure 5.4). A node is dominant if it has at least two disconnected neighbors, otherwise the node is dominated (algorithm known as rule 1). As described in [WU 99], the shortest route from a node u to a node v goes exclusively through dominating vertices, route edges being excluded.
Figure 5.4. Examples of CDS built with Wu and Li algorithm
5.4.2.3. Maximal independent set
A set IS is said to be independent if it is made up of nodes which are not neighbors in G(V,E), i.e.:
( )( ){ }, /IS u IS v S u N v= ∈ ¬∃ ∈ ∈
A maximal independent set (MIS) of a graph G(V,E) represents the IS set with the largest number of vertices. This type of topology is easier to maintain since each independent set of nodes must verify in its neighborhood that no other node from this set exists. With ad hoc networks, MIS are used in order to build CDS. More precisely, during a first step, MIS members are chosen [WAN 04] then connected to provide a CDS.

92 Wireless Ad Hoc and Sensor Networks
5.4.2.4. Localized minimum spanning tree
Minimum spanning trees are widely used in fixed networks, particularly for routing problems. A spanning tree is a topology containing all nodes from a graph and only a subset of the vertices; an MST is a minimum weight spanning tree. Although such a topology is interesting in the case of low energy broadcast protocols [CAR 05], and particularly for wireless sensor networks, involving all network nodes in a self-organization environment can seem resource-intensive.
Figure 5.5. Topology – localized minimum spanning tree
Calculating an MST requires a central entity. In the context of ad hoc networks and in agreement with what we have discussed previously, it is necessary to consider the notion of MST from a localized standpoint (see Figure 5.5). [LI 03] proposes that each node locally calculate an MST from its neighborhood information. An edge between two nodes u and v belongs to the LMST if and only if u is a neighbor to v in the MST(N(v)) graph and v is a neighbor of u in the MST(N(v)) graph.

Self-organization of Ad Hoc Networks 93
5.4.2.5. Relative neighborhood graph
RNG [TOU 80] graphs (see Figure 5.6) are also used, as are LMST, with the objective of proposing efficient and low energy broadcast protocols and also to enable topology control [CAR 05]. An edge (u,v) belongs to an RNG graph if no node w exists where w is a radio neighbor of u and v. In a formal manner, we define as RNG(G) = (V,Erng) the RNG graph of G as:
( ) ( )( ) ( ) ( )( ) ( ) ( )( )
, / , ,
, , , , ,RNGu v G w V u w
Ew v V d u w d u v d v w d u v
⎧ ⎫⎪ ⎪∈ ¬∃ ∈⎪ ⎪⎪ ⎪=⎨ ⎬⎪ ⎪∈ ∧ < ∧ <⎪ ⎪⎪ ⎪⎩ ⎭
However, to calculate an RNG graph, localization information such as GPS is required.
Figure 5.6. Topology – relative neighborhood graph

94 Wireless Ad Hoc and Sensor Networks
5.4.3. Cauterization techniques
Partitioning a network into homogenous zones is called clustering. A cluster can be linked to a service zone, a geographical zone or to a given function. There are numerous propositions of non-overlapping cluster construction in ad hoc networks. Nevertheless, the traditional algorithm builds clusters in such a way that the distance (in number of hops) between cluster members and clusterhead is at the most k [LIN 97]. The clusterhead is the node with the highest weight in the neighborhood. Officially, we define:
, / ( ), ( )ku V c C c N u C clusterheads∈ ∃ ∈ ∈ =∪∀
[ALZ 02a, LOU 03, THE 04c] propose an ad hoc network architecture mixing clusters and virtual backbone to accomplish specific broadcast and routing functions.
After reviewing the different topologies for organizing an ad hoc network from the angle of the emergence of a self-organizing structure, we now study the implementation of a virtual topology based on the rules expressed previously. We will then study its properties and how such a self-organization can improve network behavior.
5.5. Case study and proposition of a solution
5.5.1. Motivations
The structures presented above make organizing an ad hoc network possible at two levels: at node level where local interactions occur and at the organizing structure level. Here, we propose to structure the network around a virtual topology based on clusters and a virtual backbone [THE 04c] (see Figure 5.6). This three-level network hierarchization must be able to implement and support in a more efficient way functions such as routing, addressing, power management, etc. With this goal in mind, we first propose the construction of a backbone based on a CDS. It is made up of stronger nodes, and is responsible for collecting control traffic in order to optimize its diffusion to avoid the broadcast storm problem [NI 99]. Backbone nodes are chosen according to criteria reflecting their aptitude in building a stable backbone over time. The backbone cardinality should be limited. In parallel, the ad hoc network will be partitioned into logical entities, introducing a new hierarchy in the network with the help of clusters. A clusterhead controls a service

Self-organization of Ad Hoc Networks 95
zone, organizes routing, attributes addresses, etc. Backbone construction and maintenance and service zones algorithm are integrated, combining functions while limiting control traffic required for construction and maintenance. We propose the optimization of these structures’ stability instead of only focusing on minimizing their cardinality.
Figure 5.7. Virtual topology construction procedure
5.5.2. Construction of virtual topology
We have chosen to build the backbone before service zones (see Figure 5.6) for the following reasons:
– optimizing the number of nodes participating in the election of zone leaders (clusterheads);
– forcing a zone leader to become a backbone member;
– taking advantage of the backbone for zone construction control traffic;
– setting a limited distance between a node and its zone leader using the backbone.
5.5.2.1. Neighborhood discovery
Construction of a backbone is based on knowledge of kcds-neighborhood, kcds being a self-organization parameter. In addition, to detect unidirectional connections, each neighbor must include its 1-neighbors in its topology packets. Because of this, a node must periodically locally broadcast a hello packet over kcds-1 hops. Each node locally rebuilds its kcds-neighborhood by separating bidirectional from unidirectional connections.

96 Wireless Ad Hoc and Sensor Networks
5.5.2.2. Backbone
The backbone comes from the construction of a kcds-CDS: the distance between a node and backbone is a parameter of this proposition. In a static network, kcds can be raised in order to limit backbone cardinality. In a highly mobile network, kcds need to be low to limit disconnections. To initiate construction, we use a leader: it may be natural as is the case with an access point serving as an Internet gateway or it may result from an election. A node can take one of the following states:
– isolated: in initialization state, the node waits for a trigger signal to determine its state;
– active: in election process to become dominator;
– dominator: backbone member;
– dominatee: backbone client, with one dominator at less than kcds hops.
First, a dominating set is built. The leader becomes the first dominator, starting the construction process, generating a series of distributed decisions, based on the following rules:
– an isolated or active node receiving a message from a dominator at less than kcds hops becomes dominatee and sets the source as father;
– an isolated node receiving a message from a dominatee at less than kcds hops becomes active and sets a timer for the election;
– an active node for which the timer has elapsed, with the highest weight among all its active kcds-neighbors becomes dominator.
Schematically, the construction algorithm processes in waves and is not blocked by local decisions in process of resolution. During each wave, one or more active nodes are elected as dominators, these dominators’ neighbors become their dominatees, then neighbors of the dominatees become active.

Self-organization of Ad Hoc Networks 97
Figure 5.8. Example of a 2-CDS
The dominating set is then connected based on an algorithm inspired by [ALZ 2b]. Initially, the leader is the only one considered as connected. Each connected dominator relays a cds-invite at 2*kcds+1 hops. A dominator that is not connected receiving a cds-invite becomes connected and takes the dominatee which sent the packet as father. All dominatees relaying the reply of this dominator also become dominators.
In this way, the backbone is built as a tree with its root being the leader, dominators are branches and dominatees are the leaves (see Figure 5.8). Complexity in terms of time is in O(n), and in terms of messages is in O(n) (each node relaying or sending a message of state and at the most x cds-invite).
5.5.2.3. Service zones
The construction of service zones is not accomplished on the complete topology but on the sub-graph corresponding to the virtual backbone previously built: only dominators will participate in the construction of zones; a dominatee automatically joins the same cluster as its father.

98 Wireless Ad Hoc and Sensor Networks
The algorithm used here goes back to traditional cluster developments: the clusterhead that will be elected is the virtual topology member with the highest weight in the virtual backbone’s kcluster neighborhood. When the backbone is built in the leader’s neighborhood, the construction of service zones will be initiated. The construction process will be generated as soon as the backbone is locally available.
5.5.3. Maintenance of virtual topology
Due to node mobility, the previous topology will inevitably be broken. It is thus vital to provide a set of event-driven functions for maintaining virtual topology connectivity. The construction process is performed at network initialization but maintenance must be constantly active, while aiming for reduced control traffic.
In order to maintain its kcds-neighborhood, each node periodically sends its weight, state, father, distance to father, zone leader, neighbors and their weight in a hello. In this way, each dominator can maintain a list of its dominatees, dominatees of which it is the father and its sons, i.e. dominators of which it is father in the virtual structure.
5.5.3.1. Backbone
The backbone must remain connected and dominatees must be in the neighborhood of the backbone. We propose a maintenance procedure which is described in the following sections.
5.5.3.1.1. Dominance property
A dominatee only verifies its father’s validity. A father P is valid until it is a dominator, at less than kcds hops, and a neighbor exists announced at less than kcds-1 hops from P and having P as its father. If a father is invalid, the dominatee looks for a new father in its neighborhood table. Persistence of the topology is thus maximized: a dominatee retains the same father as long as it can. The dominatee informs its new father by sending a free hello.
If a dominatee finds no valid father, it then becomes active. At least one active node will be elected as dominator and will execute the maintenance procedure reserved for dominators.
5.5.3.1.2. Connectivity property
To guarantee backbone connectivity, the leader periodically sends ap-hellos with an increasing sequence number. These ap-hellos are only relayed in multicast by dominators using the backbone to limit the number of transmissions.

Self-organization of Ad Hoc Networks 99
When a dominator receives an ap-hello from its father, it relays it. Otherwise, it adds the source as secondary father if the sequence number is higher than the one from the last ap-hello sent by its father. In this way, a dominator cannot choose one of its descendants in the backbone as secondary father.
A dominator D is considered disconnected in one of the following cases:
– father of D is no longer dominator, or no longer neighbor;
– D has not received any of the least maxap-hello ap-hellos from its father.
When a dominator is disconnected, it chooses its secondary father with the highest weight as a new main father. It informs it of its decision by sending a free hello to its neighborhood. If the list of secondary fathers is empty, the following mechanism is applied:
– D generates a cds-reconnnect with the sequence number of the last ap-hello listen. It sends a broadcast packet with a TTL set at 2*kcds+1;
– D dominatees relay the broadcast packet;
– the other dominatees relay it in unicast towards their dominator in order to optimize control traffic;
– if a dominator receives the request and has received an ap-hello from its own father with a higher sequence number than the one requested, it responds with a cds-invite, relayed in unicast in the inverse route.
Finally, each dominator that hears a cds-invite can use the source as secondary father. If a dominator chooses to reconnect to a secondary father from an explicit discovery, it sends a cds-accept, acting the same as during construction.
The proactive maintenance mechanism of secondary fathers will create emergency connections in the backbone. A reconnection of the backbone is possible without latency and without control traffic.
5.5.3.1.3. Branch break
If the radio medium is busy, numerous packets can be lost. Reconnection requests will concatenate, making network overload worse. In this way, a dominator for which maxreconnect reconnection attempts have failed orders the break of its branch by sending a multicast cds-break to its sons and dominatees. A node that receives a cds-break from its father relays the message in multicast to the other nodes involved, goes to the isolated state, and waits for an external request initiating the reconstruction process.

100 Wireless Ad Hoc and Sensor Networks
A dominator noticing that it has a kcds-neighbor with an isolated state in its neighborhood table sends a cds-invite with a TTL of kcds+1. Similarly, a dominatee neighbor of its dominator which has an isolated neighbor at exactly kcds hops orders its father to send a cds-invite. A dominatee receiving a cds-invite becomes active by storing the source as secondary father in order to later connect if it is elected as dominator.
5.5.3.1.4. Cardinality
In order to keep a relatively low backbone cardinality, a mechanism to remove useless dominators is proposed. A dominator is said to be useless if it does not have a dominator son, and only dominatees at the most at kcds-1 hops. This type of dominator sends cds-useless to its dominatees by diffusion, forcing them to choose its own father as new dominator. Then it takes the dominatee state maintaining the same father.
On the other hand, to minimize the distance between a dominator and a leader, a dominator always reconnects to the dominator broadcasting the most recent ap-hello based on a sequence number. The height of the CDS is decreased, which makes it possible to obtain a CDS with more branches, and potentially more dominators can be declared useless. However, since the CDS diameter is also decreased, the collision rate of a broadcast using the backbone is decreased.
5.5.3.2. Service zones
Only dominators participate in cluster maintenance. When a hello comes from the node chosen as relay to its dominator, the dominatee can update the identifier of its clusterhead. On the other hand, a dominator must send additional information in its hellos like the distance of its leader and the next hop via the backbone to reach it.
A dominator D considers its leader as lost if the relay to its leader is no longer a neighbor, announces a different leader, or if its distance announced to the leader is higher at exactly (kcluster-kcds-1) hops. If its relay announces a new leader C to (kcluster-kcds-1) hops at the most, then D takes this new leader and updates its distance from C. D sends a free hello to force the future dominators who have previously chosen it as relay towards their leader to update their information and change their decision.
A dominant D such as leader C1 is no longer valid will attempt to reconnect. D looks for a candidate with one of these conditions among its virtual neighbors:
– a dominant D’ is a neighbor, has a leader C2 different from C1 and announces a distance to C2 via the backbone of at the most (kcluster-kcds-1) hops;

Self-organization of Ad Hoc Networks 101
– a dominant D’ is a neighbor, has C1 as leader, announces a distance to C2 via the backbone of at the most (kcluster-kcds-1) hops, and D is not a relay to C1 for D’.
D will choose this new leader and update its distance through the backbone for its next hellos.
If a dominator cannot join any existing cluster, it becomes leader. It immediately announces its decision with a free hello. This type of maintenance is possible because it relies on the backbone’s tree structure.
A clusterhead is useless if no dominant neighbor has chosen it as leader. Since the clusters are connected, no other dominator in the network will have chosen it as leader. This type of useless node looks for an existing cluster to join. If such a cluster exists, it connects to it by becoming a client node.
5.5.4. Virtual topology properties
We discuss here the properties of self-organization structure by using a network simulation tool1. It appears that the virtual topology is connected over 95% of the time, independently of network cardinality, density or node mobility. This tremendous stability is also based on a relevant choice of dominating nodes. In fact, when a node is involved in virtual topology, it usually stays for 2 minutes. Both the topology stability and the dominator stability represent time and spatial stabilities, respectively. On topologies of up to 80 nodes and for an average degree of 10, approximately 30% of nodes are dominant and are thus more involved in self-organization; clearly, the proportion of nodes involved is inversely proportional to the degree. The choice of nodes is based on a metric, whether it is degree, node identity, its energy reserve, etc. Note that the results are not really sensitive to the metric used (approximately 5% performance variation).
5.6. Contribution of self-organization
The question raised is how to take advantage of the self-organization offered? Properties of robustness, stability and temporal persistence that we have demonstrated in the previous case study are all assets in studying the influence of self-organization on ad hoc network behavior. In particular, does a routing protocol based on a self-organization scheme offer better performance if we consider a flat network based on an unstructured network? In addition, by revealing a node
1 Detailed results are provided in [THE 04b, THE 04c].

102 Wireless Ad Hoc and Sensor Networks
hierarchy, why not use it to save energy for nodes that are less involved in virtual topology?
5.6.1. Energy saving
Network nodes are energy-independent, thus it is important to provide solutions to increase their lifespan. The use of a self-organizing structure involves strong nodes in network behavior providing the opportunity of using simple solutions to save the energy of weaker nodes. The only solution to significantly reduce a node’s energy consumption is to put it in a sleeping mode [FEE 01]. No longer transmitting packets is not enough to conserve mobile node batteries because radio carrier listening also leads to energy consumption. It is possible to put dominatees to sleep for a period of time with low impact on the network’s behavior and on the virtual topology created.
On the other hand, we must take into account neighborhood density. Putting a node with few neighbors in sleep mode is taking the risk that the network becomes disconnected. For this reason, we must limit the minimum number of active neighbors in order for a dominatee to sleep. Probability Psleep that a node will go to sleep can simply be expressed as a penalty function (Pe) representing the number of 1-neighbors with the lightest weight:
Psleep1 Pe
Sleeping nodes are thus the least important dominators in the network. This metric can obviously be modified according to the node consumption model, the objective in terms of network lifespan, etc. Using self-organization as a means to efficiently deploy energy conservation functions stays the same.
In [THE 04b], the impact of its energy conservation solution is explained in more detail. This report highlights a slight self-organized structure connectivity loss of less than 4%. On average, however, a node will go to sleep 11% of the time. We observe here a strong influence from the metric enabling the election of dominator nodes: a metric that takes into consideration an energy factor will have greater influence on a network’s lifespan.

Self-organization of Ad Hoc Networks 103
5.6.2. Influence of self-organization on routing
Still discussing the self-organization structure introduced earlier, we now study how self-organization can influence routing solutions. In particular, since virtual topology proposes structuring the ad hoc network at 2 levels, a routing solution using this structure could offer a hierarchical routing methodology by separating intra-cluster routing from inter-cluster routing.
Virtual topology naturally offers a proactive knowledge of dominating zones in a kcds-neighborhood. Proactive knowledge of a cluster does not present significant overheads but should be characterized. A proactive routing solution within clusters thus becomes vital. Since virtual topology is more stable than the physical neighborhood, inter-cluster routing which will be based on this cluster topology should be more robust, while requiring less overhead due to control packets. By modifying parameters kcds and kcluster it is also possible to limit the overhead brought about by this self-organization-based routing solution.
5.6.2.1. Intra-cluster routing
Maintenance protocol of virtual topology already creates a neighborhood table for kcds neighborhood. A backbone radius kcds = 2 represents a stable backbone with a reduced number of clusterheads (~20% [THE 04a]). To have proactive knowledge of the cluster, instead of being relayed over kcds+1 hops, hello packets are relayed over 2*kcds+1. A node relays a hello if it comes from a bidirectional connection, from a node belonging to the same cluster, and if the TTL is higher than 1. This neighborhood discovery enables knowledge of the cluster’s internal topology. In this topology, a node can execute a shortest path algorithm (Dijkstra, for example) to calculate optimal routes.
5.6.2.2. Inter-cluster routing
A reactive routing solution between clusters is proposed. A route is characterized by a series of cluster identities instead of a series of node identities (addresses). Once more, this type of routing takes advantage of the virtual topology’s stability.
5.6.2.2.1. Discovery of cluster topology
Since the route is defined in the form of a series of cluster identifiers to follow, a node must know adjacent clusters and a route to reach them. This knowledge is integrated into hello packets in addition to regular information: identifier, weight, state and identifier of the clusterhead. A node neighboring several clusters can thus serve as a gateway to announced clusters. A route to a gateway can also be calculated with the help of the proactive intra-cluster routing protocol.

104 Wireless Ad Hoc and Sensor Networks
5.6.2.2.2. Route discovery
When a node S wants to send a data packet to D, the following events can occur:
– D is a maximum of kcds hops from S or S and D have the same clusterhead. D is thus in S’s neighborhood table. S directly executes the proactive intra-cluster routing algorithm introduced previously to reach D;
– D is in S’s routing table. S thus has a cluster route to reach D. It executes the inter-cluster routing algorithm;
– otherwise, S initiates a route discovery procedure.
S lets a dominator play the role of proxy for route discovery. It generates a Route Request in which it enters the address of its clusterhead in the packet’s list of clusterheads. Then it transmits to other backbone members in multicast. The dominatees do not participate in route discovery. When each dominator receives a Route Request, it relays the packet if it does not know D and if it has not seen the packet before. Before relaying it, the dominator enters its cluster identifier if it is different from the previous cluster identifier of the route contained in this packet. If D is in the dominator’s neighborhood table, then it will generate a Route Reply containing the route of clusters contained in the Route Request. Similarly, it adds in this route the address of its cluster identifier and D’s cluster identifier if they are not already present. Route Reply finally contains the cluster route to follow from D to S. The dominator sends the Route Reply to S by executing the inter-cluster routing algorithm. Route Requests are only relayed by backbone members, decreasing the overhead incurred by a route discovery.
5.6.2.2.3. Routing protocol
Inter-cluster routing protocol is used for data packets and Route Replies. The route of clusters to follow is contained in the packet header. Before relaying a Route Reply, a node can cache the acquired route to S and to D, in order to reduce the number of route discoveries generated later. If the final destination is in the neighborhood table, then node N1 sends the packet directly with the help of intra-cluster routing. If not, it looks for the first known G cluster, closest to the destination:
– a 1-neighbor N2 has clusterhead G. N2 is the next hop;
– a 1-neighbor N2 is a gateway for G. N2 is the next hop;
– a node N2 is the closest gateway to G from cluster N1. N1 executes intra-cluster routing to reach N2. N1 and N2 are in the same cluster and have the same local view. Due to, they will make consistent routing decisions.

Self-organization of Ad Hoc Networks 105
This type of solution does not create a routing loop. Instead, each time, the packet gets closer by one hop to the destination. However, it is possible to have inconsistencies in neighborhood tables created in a distributed way [WU 04]. To avoid loops, a previously seen packet is simply deleted silently. A node considers that it has already processed the packet if a packet with the same source/identifier addresses has already been relayed. Route calculation to go through a cluster is dynamic. A node always chooses to relay the packet to the first known cluster, and it must therefore update the route from the Route Reply if it becomes modified in such a way that the source benefits from this dynamic route calculation. This type of modification is not required for a data packet since the source will not receive the modification. Finally, route length is not optimal, as it is limited by relaying the packet to the closest cluster towards destination. This type of dynamic route calculation is very robust: packets arrive at the destination, even if numerous individual nodes move. The cluster routes need only be valid in order to deliver the packet to the destination.
5.6.2.2.4. Route repair
Since delivery rate is a major performance criterion for a routing protocol, it is necessary to maximize it by using for example a simple packet acknowledgement mechanism. If a node sends a data packet and does not receive acknowledgement within a period of time, it will retransmit the packet. A passive acknowledgement by cooperation with IEEE 802.11 MAC layer, such as DSR [JOH 03], is also possible. In that case, there is no overhead. If a packet cannot be transmitted on a path, a local route repair mechanism can be used. This node will re-execute the routing algorithm by simply preventing the faulty node from becoming the next hop. This type of reconstruction will limit the impact of convergence delay on neighborhood tables, improving delivery rate, but handicapping end-to-end delay.
5.6.2.3. Performance
We will now summarize results detailed in [THE 05]. The important point to mention is the spatial and temporal stability that a self-organized structure provides. Its use for routing retains this property. Routes appear more stable than those developed by traditional routing protocols (AODV, OLSR) based on a flat approach but also more robust than a hierarchical solution such as CBRP. In a self-organized system, a node must react and adapt to local changes. Due to this a route is locally maintained and, following this principle, becomes more robust. Delivery rate increases by nearly 8% compared to flat approaches. Self-organization properties allow the routing protocol to better support mobility or a bad environment: we observe relative performance insensitivity to these events. Route construction as proposed involves a longer average length than that of proactive and reactive protocols. The advantage of self-organization-based routing in relation to a hierarchical protocol such as CBRP resides in its low latency because of previously

106 Wireless Ad Hoc and Sensor Networks
known self-organization topology information which is reused for routing. On the other hand, routing proposed here takes advantage of the backbone to forward Route Request control traffic; we witness lower network capacity during dense traffic.
5.7. Conclusion
Self-organization is a key point for spontaneous networks, whether they are ad hoc or sensor types, because in our view, the self-organization paradigm is at the heart of all problems. It brings elements of solutions to the autonomous behavior of this type of networks and must help in the reconsideration of protocol deployment.
Ad hoc mobile networks are self-organized networks by nature. The network protocols (routing, localization, diffusion, etc.) are based on local node collaboration. These local interactions enable the emergence of a group of services. In this chapter, we have presented another way of considering self-organization. In this case, it consists of studying dynamic topologies that we can build to structure the network. The objective is obviously for this structure to ensure more efficient development of network protocols. Self-organization solutions must not rely on a centralized coordination system. The key points to remember when proposing self-organized architectures are:
– only local interactions;
– emergence of a global structure from local information;
– responsiveness to local changes and robustness;
– self-organizing structure not source-oriented;
– scalability.
We have emphasized two topologies for self-organization: virtual backbones and clusters or service zones. A few algorithms allowing their constructions to be adapted to a dynamic environment were presented.
Construction of a virtual topology brings robustness and stability. Temporal persistence observed provides a more stable environment supporting network protocol development, which leads us to focus on the contribution of self-organization in the behavior of an ad hoc network. We studied how a simple energy-saving solution could benefit from such a solution and we have focused on a routing solution benefiting from a self-organized structure. The performances show much better behavior than traditional approaches.

Self-organization of Ad Hoc Networks 107
5.8. Bibliography
[ADJ 05] ADJIH C., JACQUET P., VIENNOT L., “Computing Connected Dominating Sets with Multipoint Relays”, Ad Hoc and Sensor Wireless Networks, vol. 1, no. 1-2, January 2005.
[ALZ 02a] ALZOUBI K., WANG P., FRIEDER O., “Message-Optimal Connected Dominating Sets in Mobile Ad Hoc Networks”, 3rd ACM International Symposium on Mobile Ad Hoc Networking and Computing, Lausanne, Switzerland, p. 157-164, June 2002.
[ALZ 02b] ALZOUBI K.M., WAN P.-J., FRIEDER O., “Distributed Heuristics for Connected Dominating Set in Wireless Ad Hoc Networks”, IEEE ComSoc/KICS Journal of Communications and Networks, Special edition, Innovations in Ad Hoc Mobile Pervasive Networks, vol. 4, no. 1, p. 22-29, March 2002.
[BUT 03] BUTENKO S., CHENG X., DU D.-Z., PARDALOS P.M., “On the Construction of Virtual Backbone for Ad Hoc Wireless Networks”, in S. Butenko, R. Murphey, P.M. Pardalos (eds.), Cooperative Control: Models, Applications and Algorithms, p. 43-54, Kluwer Academic Publishing, Boston, January 2003.
[CAR 02] CARDEI M., CHENG X., CHENG X., DU D.-Z., “Connected domination in ad hoc wireless networks”, International Conference on Computer Science and Informatics (CSI), North Carolina, USA, March 2002.
[CAR 05] CARTIGNY J., INGELREST F., SIMPLOT-RYL D., STOJMENOVI´C I., “Localized LMST and RNG Based Minimum-Energy Broadcast Protocols in Ad Hoc Networks”, Ad Hoc Networks, vol. 3, no. 1, p. 1-16, January 2005.
[CHE 02] CHENG X., DU D.-Z., Virtual Backbone-Based Routing in Multihop Ad Hoc Wireless Networks, Report no. 02-002, University of Minnesota, Minnesota, USA, January 2002.
[DAI 03] DAI F.,WU J., “Distributed Dominant Pruning in Ad Hoc Networks”, International Conference on Communications (ICC), vol. 1, p. 353-357, IEEE, Anchorage, USA, May 2003.
[FEE 01] FEENEY L., NILSON M., “Investigating the Energy Consumption of a Wireless Network Interface in an Ad Hoc Networking Environment”, INFOCOM, p. 1548-1557, IEEE, Anchorage, USA, April 2001.
[JOH 03] JOHNSON D.B., MALTZ D.A., HU Y.-C., The Dynamic Source Routing Protocol for Mobile Ad Hoc Networks (DSR), Internet draft version no. 09, IETF, April 2003.
[LI 03] LI N., HOU J., SHA L., “Design and Analysis of an MST-Based Topology Control Algorithm”, INFOCOM, IEEE, San Francisco, USA, April 2003.

108 Wireless Ad Hoc and Sensor Networks
[LIA 00] LIANG B., HAAS Z.J., “Virtual Backbone Generation and Maintenance in Ad Hoc Network Mobility Management”, INFOCOM, p. 1293-1302, IEEE, Tel Aviv, Israel, March 2000.
[LIN 97] LIN C.R., GERLA M., “Adaptive clustering for Mobile Wireless Networks”, IEEE Journal of Selected Areas in Communications, vol. 15, no. 7, p. 1265-1275, 1997.
[LOU 03] LOU W., WU J., “A Cluster-Based Backbone Infrastructure for Broadcasting in MANET”, Workshop on Wireless, Mobile and Ad Hoc Networks, in conjunction with IPDPS, Nice, France, April 2003.
[NI 99] NI S., TSENG Y., CHEN Y., SHEU J., “The Broadcast Storm Problem in a Mobile Ad Hoc Network”, International Conference on Mobile Computing and Networking (MOBICOM), p. 151-162, ACM, Seattle, USA, August 1999.
[PER 94] PERKINS C.E., “Highly Dynamic Destination-Sequenced Distance-Vector Routing (DSDV) for Mobile Computers”, SIGCOMM, p. 234-244, ACM, London, UK, August 1994.
[PRE 05] PREHOFER C., BETTSTETTER C., “Self-Organization in Communication Networks: Principles and Design Paradigm”, IEEE Communications Magazine, vol. 43, no. 7, p. 78-85, July 2005.
[SCH 93] SCHNEIDER M., “Self-Stabilization”, ACM Computing Surveys, vol. 25, no. 1, p. 45-67, March 1993.
[THE 04a] THEOLEYRE F., VALOIS F., “Robustness and Reliability for Virtual Topologies in Wireless Multihop Access Networks”, Mediterranean Ad Hoc Networking Workshop (MedHocNet), p. 81-92, Bodrum, Turkey, June 2004.
[THE 04b] THEOLEYRE F., VALOIS F., “Topologie Virtuelle pour une Organisation des Réseaux Hybrides Multisauts”, Journées Doctorales Informatique et Réseaux (JDIR), Lannion, France, November 2004.
[THE 04c] THEOLEYRE F., VALOIS F., “A Virtual Structure for Mobility Management in Hybrid Networks”, Wireless Communications and Networking Conference (WCNC), vol. 5, p. 1035-1040, Atlanta, USA, March 2004.
[THE 05] THEOLEYRE F., VALOIS F., “Routage hybride sur structure virtuelle dans les réseaux mobiles ad hoc”, Colloque francophone sur Ingénierie des Protocoles (CFIP), Bordeaux, France, March 2005.
[TOU 80] TOUSSAINT G., “The Relative Neighborhood Graph of Finite Planar Set”, Pattern Recognition, vol. 12, p. 261-268, 1980.
[WAN 04] WANG P.-J., ALZUBI K.M., FRIEDER O., “Distributed Construction of Connected Dominating Set in Wireless Ad Hoc Networks”, Mobile Networks and Applications, vol. 9, no. 2, p. 141-149, April 2004.

Self-organization of Ad Hoc Networks 109
[WU 99] WU J., LI H., “On Calculating Connected Dominating Set for Efficient Routing in Ad Hoc Wireless Networks”, International Workshop on Discrete Algorithms and Methods for Mobile Computing and Communications (DIALM), p. 714, ACM, Seattle, USA, August 1999.
[WU 04] WU J., LOU W., “Extended Multipoint Relays to Determine Connected Dominating Sets in MANETS”, Conference on Sensor and Ad Hoc Communications and Networks (SECON), Santa Clara, USA, October 2004.