Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 59, NO. 8, AUGUST 2011 3903
Wide-Band Collaborative Spectrum Search Strategyfor Cognitive Radio Networks
Siavash Fazeli-Dehkordy, Student Member, IEEE, Konstantinos N. Plataniotis, Senior Member, IEEE, andSubbarayan Pasupathy, Fellow, IEEE
Abstract—We consider a scenario where � collaborating cogni-tive radios (CRs) try to jointly detect spectrum opportunities in awide-band spectrum within a predefined spectrum sensing interval��. We assume that each CR is equipped with a tunable bandpassfilter (BPF) and is able to sense one frequency band (channel) at atime. The sensing interval consists of � sensing slots of length � .During each sensing slot, each of the collaborating CRs is assignedto sense one of the channels and report its observation to the otherCRs. The occupancy of each channels is decided after � sensingslots based on a fusion rule that is fitted to a regulatory constraintor a coarse sensing task. We aim to maximize the expected numberof identified idle channels by optimally choosing the index of thechannel to be sensed by each collaborating CR at each sensing slot.We model this problem in its most general form as a finite horizonMarkov decision process. We derive closed-form solutions for anoptimal spectrum sensing policy and the associated value functionsfor the case of two collaborating CRs where individual sensing de-cisions are fused together according to the OR-rule. We show thatthe gain due to the optimal sensing policy is more significant whenthe spectrum utilization is high.
Index Terms—Cognitive radio, collaborative spectrum sensing,finite horizon Markov decision process.
I. INTRODUCTION
T ODAY’S wireless systems are characterized by staticspectrum allocation strategies in which each system is
licensed to operate over a specific frequency band in a givengeographic area. However, the spectrum may be used only overshort intervals and around a transmitter-receiver pair that areclose to each other. As a result, most frequency bands in themajority of geographical areas are underutilized.
Cognitive radios (CRs) try to exploit frequency bands whichare not being used by primary users at a particular place andtime. To protect the primary systems from the adverse effectsof secondary transmissions, “blank spaces” in frequency, time,and space should be reliably detected. Database registry, broad-casting beacon signals, and spectrum sensing are three differentapproaches that may be used to achieve this goal. The first two
Manuscript received July 11, 2010; revised December 03, 2010 and February25, 2011; accepted April 26, 2011. Date of publication May 10, 2011; date ofcurrent version July 13, 2011. The associate editor coordinating the review ofthis manuscript and approving it for publication was Prof. Sofiene Affes.
The authors are with the Edward S. Rogers Sr. Department of Electrical andComputer Engineering, University of Toronto, Toronto, ON, Canada, M5S 3G4(e-mail: [email protected]; [email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TSP.2011.2152395
involve collaboration between the primary and secondary net-works. In these approaches, the primary network provides thesecondary users with the information regarding the current spec-trum use either via a centralized database or through broad-casting this information on regional beacons [1]. However, thedeployment of these methods involves remarkable modifica-tions to the licensed systems as well as frequent communica-tion between the primary and secondary networks. Furthermore,some of them require positioning information at the secondaryterminals, which can be expensive.
In the absence of cooperation between the primary and sec-ondary networks, spectrum sensing enables secondary users tomonitor a particular licensed band in order to find “spectrumholes” for opportunistic access [2]–[4]. The best way to detectspectrum holes is to detect the primary receivers within the com-munication range of a secondary user. However, this is pos-sible only if the primary receivers collaborate by transmittinga pilot signal. Consequently, most research in this area has fo-cused on primary transmitter detection. This approach is basedon the detection of weak signals from nearby primary transmit-ters through measurements of secondary users. Matched filterdetection, energy detection, and cyclostationary feature detec-tion are three commonly used schemes for primary transmitterdetection [5].
When a CR experiences severe shadowing or multipathfading, it can not reliably detect the presence of nearby primarytransmitters. To address this problem, collaborative spectrumsensing is proposed in the literature. In these schemes, everyCR performs its local spectrum sensing and reports the resultto a common receiver. These results are then fused togetherto make the final decision about the absence or presence ofprimary users. One of the first works is that of Ghasemi andSousa [6], who study the performance of collaborative spectrumsensing in fading channels. They consider a scenario whereCRs collaborate in spectrum sensing by sharing only their final1-bit decisions “0” (idle) or “1” (busy). They assume that all theCRs experience independent and identically distributed (i.i.d.)fading/shadowing, and all the users employ energy-detectionwith the same decision threshold. A CR receives decisions from
other users and fuses them together using the OR-ruleor 1-out-of- rule. Therefore, the final decision is “1” if any ofthe individual decisions is “1.” It is shown that the proposedcollaborative spectrum sensing scheme significantly increasesthe reliability of detection in fading and shadowing channels. In[7], a collaborative sensing method is proposed that guaranteesa desired sensing diversity order for each primary channel. Thedesign of the sensing policy is transformed into constructing
1053-587X/$26.00 © 2011 IEEE

3904 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 59, NO. 8, AUGUST 2011
and allocating frequency hopping codes to the collaboratingCRs.
In general, CRs should be able to sense a wide range of fre-quencies and search for idle frequency bands. The widebandsignal received by the antenna of a CR is a superposition of theprimary signals received over different frequency bands. Manyfactors such as the location of the primary users as well as theiroperating power levels affect the signal strength in each fre-quency band. As a result, the wideband sensing approach in-volves detection of extremely weak signals from widely sepa-rated or severely shadowed transmitters in the presence of strongsignals from nearby transmitters [2]. Therefore, it may imposestringent constraints on the linearity of the RF amplifier as wellas the sampling rate and accuracy of the A/D converter [2]. An-other approach is to employ a tunable bandpass filter (BPF) tosense one frequency band (channel) at a time (the narrowbandsensing approach).
The problem of multichannel opportunistic access has beenconsidered in several recent works. Different spectrum sensingpolicies have been proposed in the literature for choosing thechannels to be sensed at a given time. After identifying the avail-able channels through spectrum sensing, a medium access con-trol (MAC) protocol must be adopted to determine the spectrumaccess scheme among the secondary users [8], [9]. The authorsin [10] consider the problem where a CR is searching for thefirst available primary channel. Each secondary user picks up achannel based on a search strategy to detect whether it is idleor not. If the selected channel turned out to be busy, the CRpicks up another channel to sense and the search stops whenan idle channel is found. The authors compare the performanceof several search schemes in terms of the mean time to detec-tion. In [11], a two-stage spectrum detection strategy is proposedthat decreases the average channel search time by allowing thespectrum detector to focus on frequency channels which aremore likely to be vacant. It is shown that the proposed detectionstrategy significantly outperforms the conventional single-stagestrategy when the spectrum utilization is high.
The spectrum sensing and access policies proposed in[12]–[15] focus on the utilization of temporal spectrum oppor-tunities. They are based on optimizing the secondary systemthroughput under the assumption that the occupancy of primarychannels over time follows a discrete-time Markov process.An analytical framework for opportunistic spectrum accessbased on the theory of partially observable Markov decisionProcess (POMDP) is proposed in [12], and optimal policiesfor spectrum sensing and access are derived. The authors alsopropose a suboptimal greedy approach with lower complexityand comparable performance. A similar problem but under twodifferent assumptions, i.e., an energy constraints on the sec-ondary users and independent and statistically identical (i.i.d.)channel states, is considered in [13] and [14], respectively.Under the assumption that different CRs may see differentbehavior on a given primary channel, the authors in [15] aimto maximize the expected sum-throughput of all the secondaryusers. The throughputs resulting from different user-channelcombinations are modeled as i.i.d. random processes, and the
problem of learning the optimal matching of users to channelsis formulated as a combinatorial multiarmed bandit problem.
The proposed cooperative multichannel spectrum sensingpolicy in [16] employs the -greedy reinforcement methodto select the most promising primary channels based on theoccupancy statistics of the primary users. Using the knowledgeabout the detection performance of the collaborative CRs ateach primary channel, the policy assigns the collaborativeCRs to sense the interesting channels in a way to minimizethe number of sensors per channel. The sensing policy alsoguarantees a desired misdetection probability at each primarychannel. Minimizing the number of sensors per channel can becrucial in terms of power efficiency in battery powered CRs.
In this paper, we focus on multichannel collaborative spec-trum search within a single sensing interval, and we assume thatthe status of the primary channels remain unchanged during thesearch process. The main contribution in this work is to exploitthe correlation among the observations of different CRs to expe-dite the spectrum search process when multiple primary chan-nels are available for opportunistic access. The identified idlechannels can then be accessed by different secondary users ac-cording to a MAC protocol, or they can be used for an unlicensedwide-band transmission.
We assume that the spectrum available for opportunistic ac-cess is divided into several channels (or frequency bands). Thecollaborating CRs, each equipped with a tunable BPF, try tojointly detect as many idle channels as possible within a pre-defined sensing interval . The sensing interval consists ofsensing slots of length . During each sensing slot, each CRtunes to and senses one of the frequency channels and reportsits observation to other collaborating CRs. The occupancy ofeach channel is decided based on a fusion rule which is tailoredto fit specific constraints. Given the past observations, we are in-terested in the optimal choice of the channels to be sensed, eachby a different CR, at each sensing slot. The goal is to maximizethe expected number of identified idle channels after sensingslots.
We provide a formal definition of the wide-band collabora-tive spectrum search problem in Section II. In Section III, wemodel this problem in its most general form as a finite horizonMarkov decision process. In Section IV, we consider the spe-cial case where individual CRs quantize their observations to1-bit sensing decisions, which are then fused together accordingto the OR-rule. We derive closed-form solutions for the op-timal sensing policy and the associated value functions for thecase of two collaborating CRs and discuss the general struc-ture of the solution for the case of more than two collaboratingCRs. In Section V, we provide an example to illustrate howsystem parameters such as the structure of the spectrum detectorat each CR, the regulatory constraints, and the characteristicsof the primary network are related to the model parameters inSections III–V. Conclusions are drawn in Section VI.
II. PROBLEM FORMULATION
We assume that the spectrum available for opportunistic ac-cess is divided into primary channels of bandwidth . There
FAZELI-DEHKORDY et al.: WIDE-BAND COLLABORATIVE SPECTRUM SEARCH STRATEGY 3905
are collaborating CRs trying to identify the maximum numberof idle channels after sensing slots while satisfying specificregulatory constraints. Each sensing slot is of length . At thebeginning of each stage, or sensing slot, each CR is assigned tosense one of the primary channels and report its observation toa fusion center (which can be one of the CRs). In the case ofenergy detection, this report can be a quantized version of theaccumulated energy during that sensing slot. All these reportsare stored in an observation state matrix. The observation state,aside from the time dependence, is given at any stage by andimensional matrix
......
. . .... (1)
with
(2)
andif the th channel is sensed by the th CRotherwise
(3)
where denotes the outcome of sensing the th channelby the th CR. In the case of one-bit quantization, we have
(idle) (busy) (not sensed yet) forany and ; using a two-bit quantizer, the set becomes
not sensed ; and so forth. Let usdenote by the observation state after sensing slots. Theinitial observation state is given by
......
. . .... (4)
The number of identified idle channels is a function of thefinal observation state and is given by:
(5)
where is the th column of , and is an indicator func-tion. Note that indicates that the observation vectorfor the th channel satisfies the specific regulatory constraintsthat limit the interference to primary users, and, therefore, canbe used for secondary transmissions. The imposed constraintsalso determine the quantization thresholds at each individualCR. In a different scenario, these constraints may be adjustedfor a coarse sensing task, which is followed by a second sensingstage. In the case of two collaborating CRs, single bit quantiza-tion, and OR-rule fusion, the function is given by
for (6)
In this work, we do not aim to improve the performance ofspectrum detection for a single primary channel (e.g., in termsof misdetection and false-alarm probabilities). As a result, weassume that the decision rule for each primary channel, i.e., theindicator function as well as the detection thresholds, is given
and independent of the sensing policy. Our goal is to speed upthe channel search process by designing a sensing policy that al-lows the collaborative CRs to sense the channels that are morelikely to be identified as idle. This goal is achieved by exploitingthe correlation among the observations of different CRs. Here,we assume that the regulatory constraints are strict enough suchthat the identified idle channels can be successfully used for sec-ondary transmissions. In other words, we neglect misdetectionsin this work.
III. OPTIMAL SENSING POLICY
A policy for spectrum sensing is a sequence of functions, one for each value of , that map each observation
state to a sensing action of the form ,where denotes the index of the channel to be sensed by the thCR. The goal is to maximize the expected number of identifiedidle channels after sensing slots given that the initial state is
(7)
where is the set of all sensing policies. This problem can bemodeled as a finite horizon Markov decision process [17] withthe following reward function:
(8)
Therefore, the reward function gives the expected number ofidle channels instantly identified as a result of sensing action .We define the value function as the expected numberof identified idle channels after sensing slots following policy
starting from observation state . Let denote the totalexpected reward associated with the optimal sensing policy .The recurrence relations (Bellman equations) for the sequences
and are given by
(9)
(10)
where denotes the set of sensing actions, is theprobability that action in state will lead to state , and
(11)
(12)
Note that the values of the reward function and transitionprobabilities generally depend on several factors, including thefading/shadowing characteristics of the environment, structureof the spectrum detector at each CR, regulatory constraints,density of primary users in the network as well as their trans-mitted powers, and correlation in the occupancy of differentchannels. Finite horizon Markov decision processes in general
3906 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 59, NO. 8, AUGUST 2011
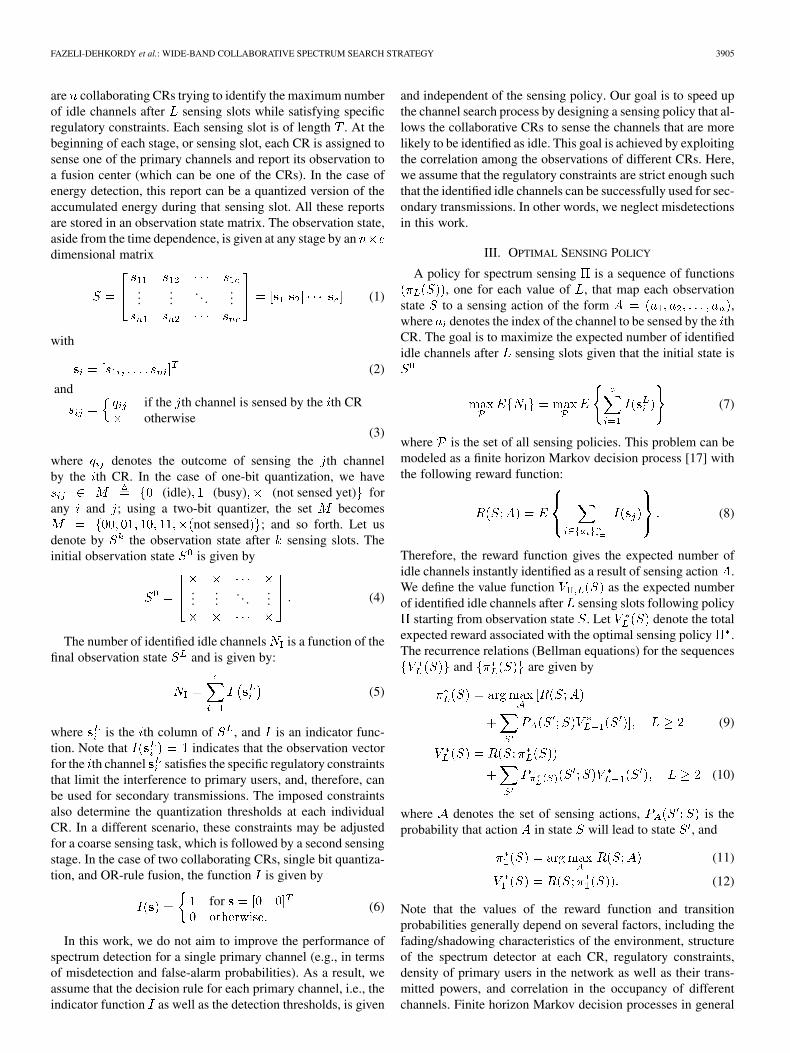
Fig. 1. Channels of type I and type II for the problem considered in Section IV.
can be solved in polynomial time either by dynamic program-ming or by linear programming [18].
IV. OR-RULE DETECTOR
In this section, we consider the case where OR-rule is used tofuse the individual decisions made by the collaborating CRs.Upon sensing a primary channel, each CR transmits its indi-vidual 1-bit sensing decision regarding the occupancy of thatchannel to a fusion center. A channel can be used by the sec-ondary network only if it is sensed by all the collaborating CRsand all the decisions are “0”. To simplify the analysis, we as-sume that , and therefore, not all the channels can besensed by at least one CR. We also assume that the joint distribu-tions of the measurements of the collaborating CRs are indepen-dent and identical for all the channels. In other words, there is nobias toward a certain primary channel, and there is no correla-tion in the occupancy of different channels. The above assump-tions significantly reduce the effective size of the state space in(1); in fact, every permutation of the columns in results in anequivalent observation state. Although the above assumptionsmay not hold in real situations, e.g., when the density of pri-mary users is different for different channels, or when the col-laborating CRs experience different shadowing conditions, weobserve in Section V that a remarkable gain is obtainable due tothe proposed sensing policy even when the above assumptionsdo not hold. In this section, we will derive closed-form solutionsfor the optimal sensing policy and the associated value functionsfor the case of two collaborating CRs and discuss the generalstructure of the optimal sensing policy for the case of more thantwo collaborating CRs.
A. Two Collaborating CRs
For the case of two collaborating CRs, the observation statecan be simplified to an ordered pair , where anddenote the number of channels of type I and type II, respectively(see Fig. 1). Type I (II) channels are those that are declared idleby the first (second) CR but not yet sensed by the second (first)CR. Note that the channels that are declared busy by at least oneof the CRs are not sensed in the next sensing slots and have noeffect on the future sensing decisions. Similar argument appliesto the already identified idle channels, that is, the channels thatare declared idle by both CRs. Since we assume that ,at any stage of the search process, irrespective of the sensingpolicy, there exist channels that have not been sensed by any ofthe CRs. Therefore, the number of these channels also has noeffect on the sensing policy.
Following the above discussion, there are five distinct sensingactions, which are illustrated in Fig. 2. Note that each channelis represented by a column in the observation state. In Action 1,the first and second CRs respectively sense a Type II and Type I
Fig. 2. Different sensing actions for the problem considered in Section IV.
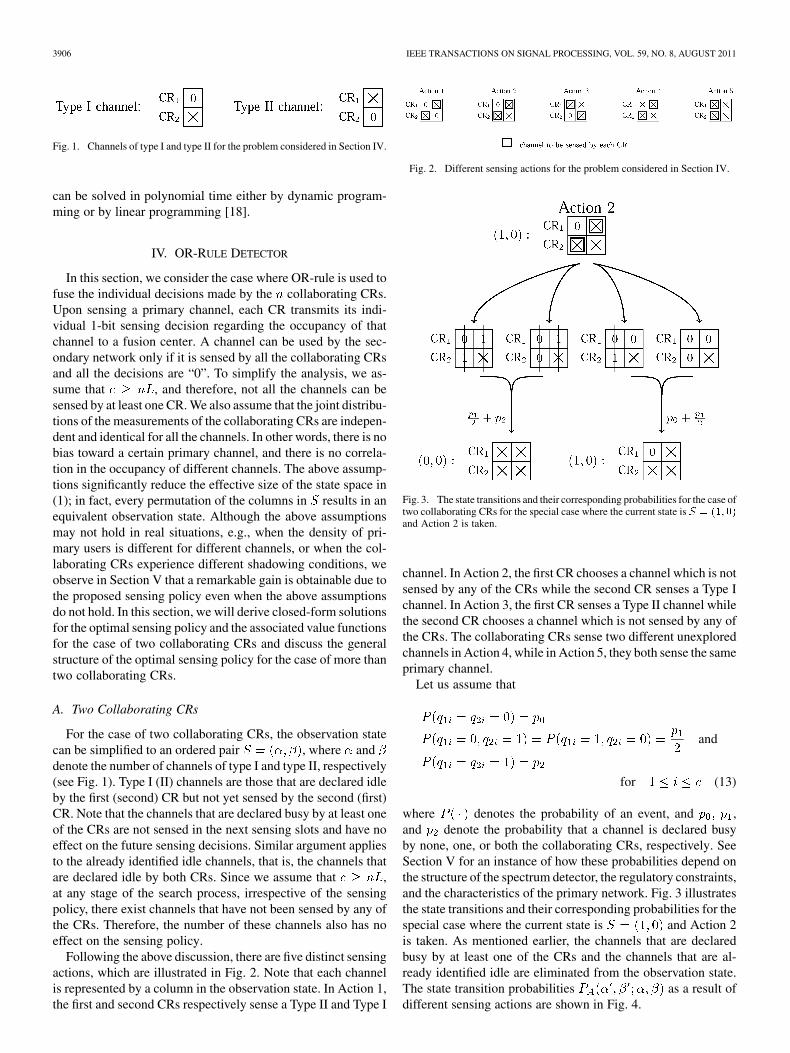
Fig. 3. The state transitions and their corresponding probabilities for the case oftwo collaborating CRs for the special case where the current state is � � ��� ��and Action 2 is taken.
channel. In Action 2, the first CR chooses a channel which is notsensed by any of the CRs while the second CR senses a Type Ichannel. In Action 3, the first CR senses a Type II channel whilethe second CR chooses a channel which is not sensed by any ofthe CRs. The collaborating CRs sense two different unexploredchannels in Action 4, while in Action 5, they both sense the sameprimary channel.
Let us assume that
and
for (13)
where denotes the probability of an event, and ,and denote the probability that a channel is declared busyby none, one, or both the collaborating CRs, respectively. SeeSection V for an instance of how these probabilities depend onthe structure of the spectrum detector, the regulatory constraints,and the characteristics of the primary network. Fig. 3 illustratesthe state transitions and their corresponding probabilities for thespecial case where the current state is and Action 2is taken. As mentioned earlier, the channels that are declaredbusy by at least one of the CRs and the channels that are al-ready identified idle are eliminated from the observation state.The state transition probabilities as a result ofdifferent sensing actions are shown in Fig. 4.
FAZELI-DEHKORDY et al.: WIDE-BAND COLLABORATIVE SPECTRUM SEARCH STRATEGY 3907
Fig. 4. The state transition probabilities as a result of different sensing actionsfor the case of two collaborating CRs.
The expected number of newly identified idle channels as aresult of sensing action when the current state is isgiven by
for
for
forforfor
(14)
The Bellman equations are written as
(15)
(16)
where denotes the set of admissible actions given that thestate is :
forforforfor
(17)
as an example, Action 2 is not admissible when there is no Type Ichannel.
Theorem 1: The solution for in the recurrencerelation in (15) is given by
(18)
where . Furthermore, an optimal sensing policyis expressed as
forforforforfor
(19)
Proof: See Appendix.As the above theorem implies, the optimal sensing policy in
(19) does not depend on , and ; although, the associ-ated value function does. In this policy, each user first senses achannel which is already successfully sensed by the other CR(a type I or type II channel). Therefore, Action 1, whenever ad-missible, is preferable to other actions. Accordingly, Action 2and 3 are preferable to Actions 4 and 5. When there is no type Ior type II channels, the collaborating CRs should sense two dif-ferent unexplored channels except at the last stage, where Ac-tion 5 is the optimal choice. Note that if the collaborating CRsscan the primary channels synchronously, i.e., if they sense thesame channel at each sensing slot, the expected number of iden-tified idle channels is equal to . Therefore, we can define therelative gain of the optimal sensing policy as
(20)
Corollary 1: The relative gain of the optimal sensing policyis an increasing function of .
Proof: Differentiating (20) with respect to yields
(21)
note that .Corollary 2: The relative gain of the optimal sensing policy
is an increasing function of the number of sensing slots.
Proof: We have
for
(22)
and the asymptotic gain is given by .
3908 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 59, NO. 8, AUGUST 2011
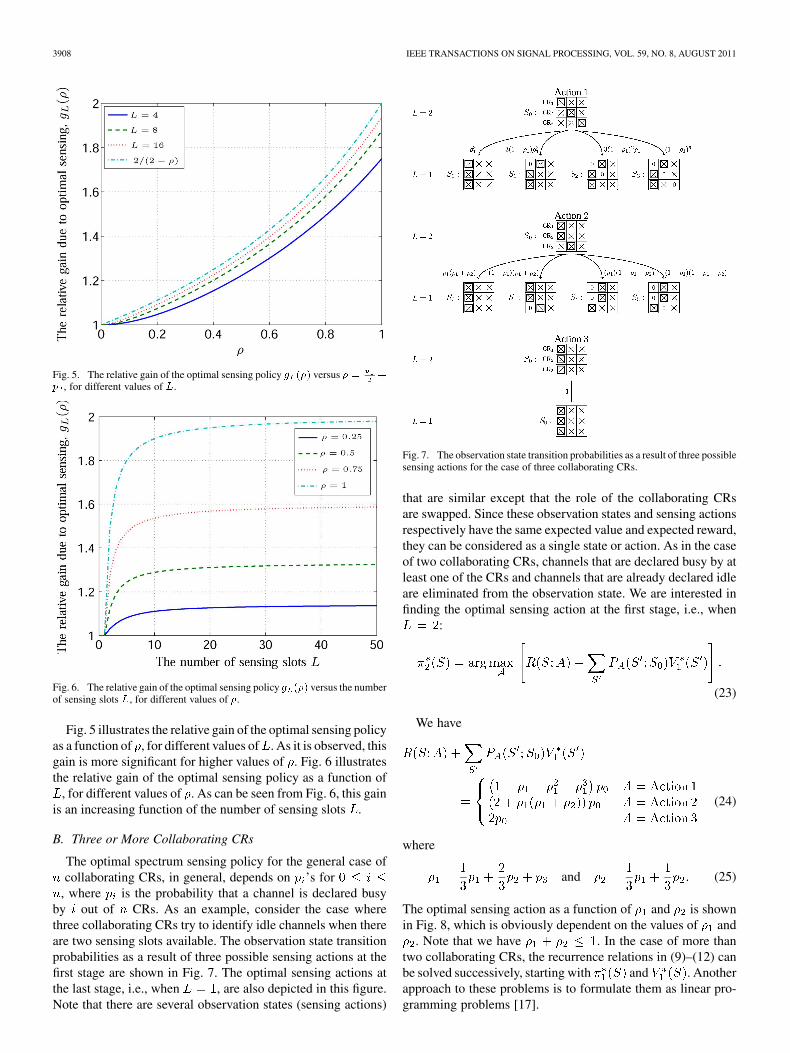
Fig. 5. The relative gain of the optimal sensing policy � ��� versus � � �� , for different values of �.
Fig. 6. The relative gain of the optimal sensing policy � ��� versus the numberof sensing slots �, for different values of �.
Fig. 5 illustrates the relative gain of the optimal sensing policyas a function of , for different values of . As it is observed, thisgain is more significant for higher values of . Fig. 6 illustratesthe relative gain of the optimal sensing policy as a function of
, for different values of . As can be seen from Fig. 6, this gainis an increasing function of the number of sensing slots .
B. Three or More Collaborating CRs
The optimal spectrum sensing policy for the general case ofcollaborating CRs, in general, depends on ’s for
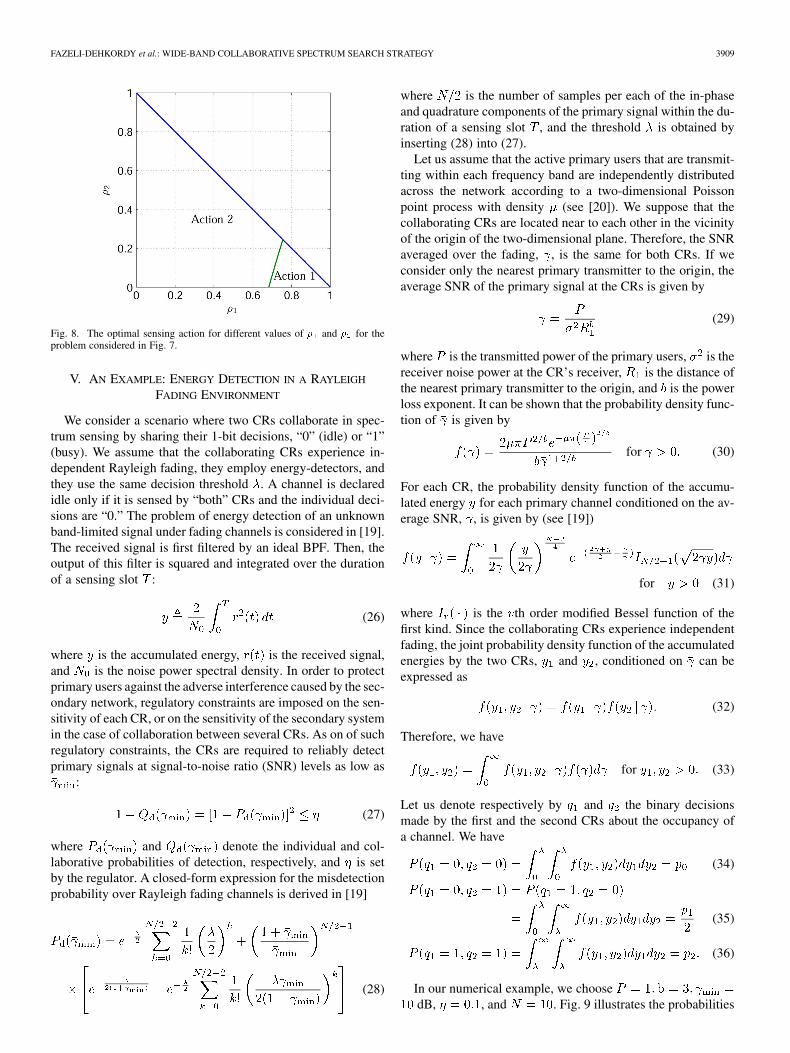
, where is the probability that a channel is declared busyby out of CRs. As an example, consider the case wherethree collaborating CRs try to identify idle channels when thereare two sensing slots available. The observation state transitionprobabilities as a result of three possible sensing actions at thefirst stage are shown in Fig. 7. The optimal sensing actions atthe last stage, i.e., when , are also depicted in this figure.Note that there are several observation states (sensing actions)
Fig. 7. The observation state transition probabilities as a result of three possiblesensing actions for the case of three collaborating CRs.
that are similar except that the role of the collaborating CRsare swapped. Since these observation states and sensing actionsrespectively have the same expected value and expected reward,they can be considered as a single state or action. As in the caseof two collaborating CRs, channels that are declared busy by atleast one of the CRs and channels that are already declared idleare eliminated from the observation state. We are interested infinding the optimal sensing action at the first stage, i.e., when
:
(23)
We have
(24)
where
and (25)
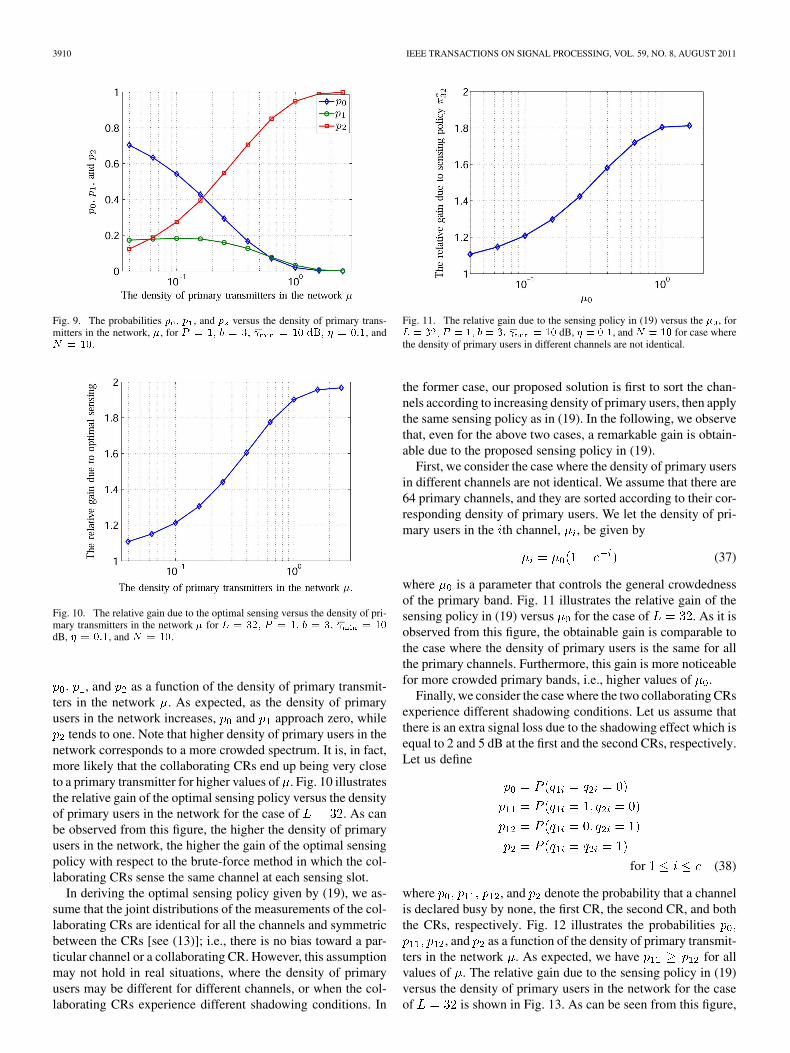
The optimal sensing action as a function of and is shownin Fig. 8, which is obviously dependent on the values of and
. Note that we have . In the case of more thantwo collaborating CRs, the recurrence relations in (9)–(12) canbe solved successively, starting with and . Anotherapproach to these problems is to formulate them as linear pro-gramming problems [17].
FAZELI-DEHKORDY et al.: WIDE-BAND COLLABORATIVE SPECTRUM SEARCH STRATEGY 3909
Fig. 8. The optimal sensing action for different values of � and � for theproblem considered in Fig. 7.
V. AN EXAMPLE: ENERGY DETECTION IN A RAYLEIGH
FADING ENVIRONMENT
We consider a scenario where two CRs collaborate in spec-trum sensing by sharing their 1-bit decisions, “0” (idle) or “1”(busy). We assume that the collaborating CRs experience in-dependent Rayleigh fading, they employ energy-detectors, andthey use the same decision threshold . A channel is declaredidle only if it is sensed by “both” CRs and the individual deci-sions are “0.” The problem of energy detection of an unknownband-limited signal under fading channels is considered in [19].The received signal is first filtered by an ideal BPF. Then, theoutput of this filter is squared and integrated over the durationof a sensing slot :
(26)
where is the accumulated energy, is the received signal,and is the noise power spectral density. In order to protectprimary users against the adverse interference caused by the sec-ondary network, regulatory constraints are imposed on the sen-sitivity of each CR, or on the sensitivity of the secondary systemin the case of collaboration between several CRs. As on of suchregulatory constraints, the CRs are required to reliably detectprimary signals at signal-to-noise ratio (SNR) levels as low as
:
(27)
where and denote the individual and col-laborative probabilities of detection, respectively, and is setby the regulator. A closed-form expression for the misdetectionprobability over Rayleigh fading channels is derived in [19]
(28)
where is the number of samples per each of the in-phaseand quadrature components of the primary signal within the du-ration of a sensing slot , and the threshold is obtained byinserting (28) into (27).
Let us assume that the active primary users that are transmit-ting within each frequency band are independently distributedacross the network according to a two-dimensional Poissonpoint process with density (see [20]). We suppose that thecollaborating CRs are located near to each other in the vicinityof the origin of the two-dimensional plane. Therefore, the SNRaveraged over the fading, , is the same for both CRs. If weconsider only the nearest primary transmitter to the origin, theaverage SNR of the primary signal at the CRs is given by
(29)
where is the transmitted power of the primary users, is thereceiver noise power at the CR’s receiver, is the distance ofthe nearest primary transmitter to the origin, and is the powerloss exponent. It can be shown that the probability density func-tion of is given by
for (30)
For each CR, the probability density function of the accumu-lated energy for each primary channel conditioned on the av-erage SNR, , is given by (see [19])
for (31)
where is the th order modified Bessel function of thefirst kind. Since the collaborating CRs experience independentfading, the joint probability density function of the accumulatedenergies by the two CRs, and , conditioned on can beexpressed as
(32)
Therefore, we have
for (33)
Let us denote respectively by and the binary decisionsmade by the first and the second CRs about the occupancy ofa channel. We have
(34)
(35)
(36)
In our numerical example, we choosedB, , and . Fig. 9 illustrates the probabilities
3910 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 59, NO. 8, AUGUST 2011
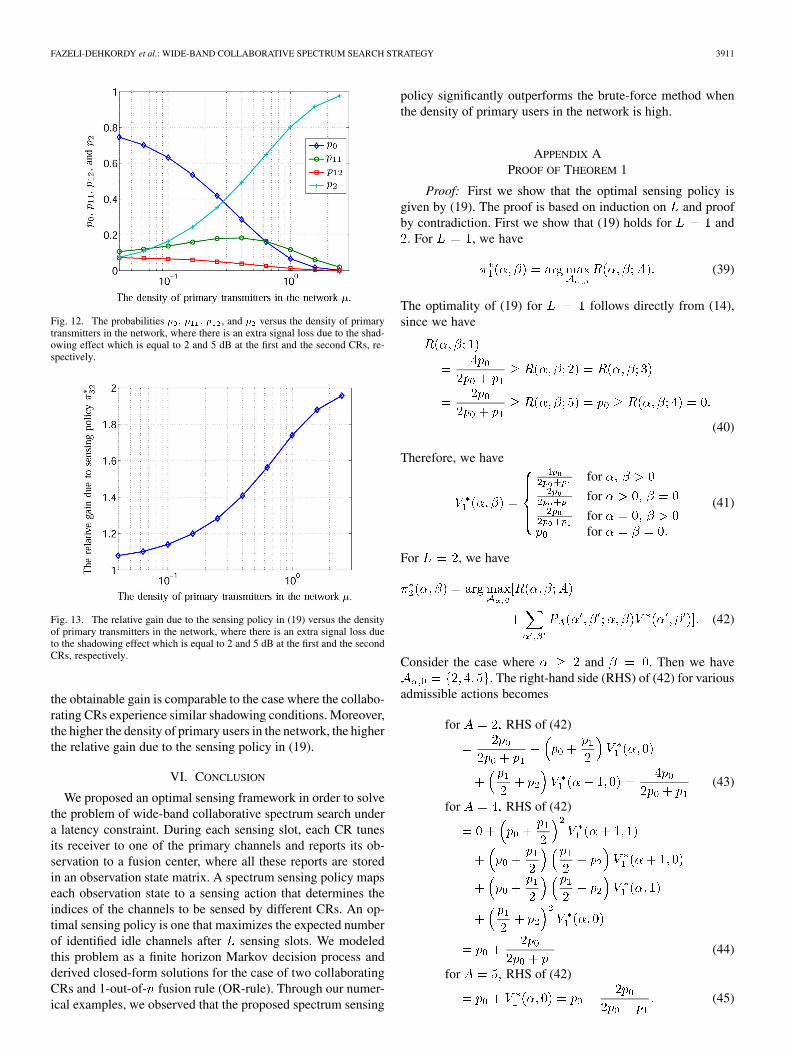
Fig. 9. The probabilities � � � , and � versus the density of primary trans-mitters in the network, �, for � � �� � � �� �� � �� ��� � � ���, and � ��.
Fig. 10. The relative gain due to the optimal sensing versus the density of pri-mary transmitters in the network � for � ��� � � �� � � �� �� � ��
dB, � � ���, and � ��.
, and as a function of the density of primary transmit-ters in the network . As expected, as the density of primaryusers in the network increases, and approach zero, while
tends to one. Note that higher density of primary users in thenetwork corresponds to a more crowded spectrum. It is, in fact,more likely that the collaborating CRs end up being very closeto a primary transmitter for higher values of . Fig. 10 illustratesthe relative gain of the optimal sensing policy versus the densityof primary users in the network for the case of . As canbe observed from this figure, the higher the density of primaryusers in the network, the higher the gain of the optimal sensingpolicy with respect to the brute-force method in which the col-laborating CRs sense the same channel at each sensing slot.
In deriving the optimal sensing policy given by (19), we as-sume that the joint distributions of the measurements of the col-laborating CRs are identical for all the channels and symmetricbetween the CRs [see (13)]; i.e., there is no bias toward a par-ticular channel or a collaborating CR. However, this assumptionmay not hold in real situations, where the density of primaryusers may be different for different channels, or when the col-laborating CRs experience different shadowing conditions. In
Fig. 11. The relative gain due to the sensing policy in (19) versus the � , for � ��� � � �� � � �� �� � �� dB, � � ���, and � �� for case wherethe density of primary users in different channels are not identical.
the former case, our proposed solution is first to sort the chan-nels according to increasing density of primary users, then applythe same sensing policy as in (19). In the following, we observethat, even for the above two cases, a remarkable gain is obtain-able due to the proposed sensing policy in (19).
First, we consider the case where the density of primary usersin different channels are not identical. We assume that there are64 primary channels, and they are sorted according to their cor-responding density of primary users. We let the density of pri-mary users in the th channel, , be given by
(37)
where is a parameter that controls the general crowdednessof the primary band. Fig. 11 illustrates the relative gain of thesensing policy in (19) versus for the case of . As it isobserved from this figure, the obtainable gain is comparable tothe case where the density of primary users is the same for allthe primary channels. Furthermore, this gain is more noticeablefor more crowded primary bands, i.e., higher values of .
Finally, we consider the case where the two collaborating CRsexperience different shadowing conditions. Let us assume thatthere is an extra signal loss due to the shadowing effect which isequal to 2 and 5 dB at the first and the second CRs, respectively.Let us define
for (38)
where , and denote the probability that a channelis declared busy by none, the first CR, the second CR, and boththe CRs, respectively. Fig. 12 illustrates the probabilities
, and as a function of the density of primary transmit-ters in the network . As expected, we have for allvalues of . The relative gain due to the sensing policy in (19)versus the density of primary users in the network for the caseof is shown in Fig. 13. As can be seen from this figure,
FAZELI-DEHKORDY et al.: WIDE-BAND COLLABORATIVE SPECTRUM SEARCH STRATEGY 3911
Fig. 12. The probabilities � � � � � , and � versus the density of primarytransmitters in the network, where there is an extra signal loss due to the shad-owing effect which is equal to 2 and 5 dB at the first and the second CRs, re-spectively.
Fig. 13. The relative gain due to the sensing policy in (19) versus the densityof primary transmitters in the network, where there is an extra signal loss dueto the shadowing effect which is equal to 2 and 5 dB at the first and the secondCRs, respectively.
the obtainable gain is comparable to the case where the collabo-rating CRs experience similar shadowing conditions. Moreover,the higher the density of primary users in the network, the higherthe relative gain due to the sensing policy in (19).
VI. CONCLUSION
We proposed an optimal sensing framework in order to solvethe problem of wide-band collaborative spectrum search undera latency constraint. During each sensing slot, each CR tunesits receiver to one of the primary channels and reports its ob-servation to a fusion center, where all these reports are storedin an observation state matrix. A spectrum sensing policy mapseach observation state to a sensing action that determines theindices of the channels to be sensed by different CRs. An op-timal sensing policy is one that maximizes the expected numberof identified idle channels after sensing slots. We modeledthis problem as a finite horizon Markov decision process andderived closed-form solutions for the case of two collaboratingCRs and 1-out-of- fusion rule (OR-rule). Through our numer-ical examples, we observed that the proposed spectrum sensing
policy significantly outperforms the brute-force method whenthe density of primary users in the network is high.
APPENDIX APROOF OF THEOREM 1
Proof: First we show that the optimal sensing policy isgiven by (19). The proof is based on induction on and proofby contradiction. First we show that (19) holds for and
. For , we have
(39)
The optimality of (19) for follows directly from (14),since we have
(40)
Therefore, we have
for
for
forfor
(41)
For , we have
(42)
Consider the case where and . Then we have. The right-hand side (RHS) of (42) for various
admissible actions becomes
for RHS of (42)
(43)
for RHS of (42)
(44)
for RHS of (42)
(45)

3912 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 59, NO. 8, AUGUST 2011
Note that . Analogously, for ,we have
for RHS of (42)
(46)
for RHS of (42) (47)
for RHS of (42) (48)
Hence the maximizing action for where isAction 2, which is also given by (19). Similar results are ob-tained for other points in the -plane.
Let us now assume that the sensing policy given by (19) isoptimal for up to some but not for . Withsensing slots left, an optimal sensing policy can be expressed as
(49)
Since the policy , which is given by (19),is not optimal, we have
and (50)
(51)
for some in the -plane. Let be a policy of the form. From the optimality of
, we have
(52)
for any , andProposition 1: For any and , we can choose andsuch that
(53)
which is in contradiction with (51) and (52). Therefore we have
(54)
Proof: We show the proof for a special choice of and. Similar results are obtained for any arbitrary and .
Suppose there are sensing slots left, and . Wehave . Let us assume that .We have
(55)
where we used the fact that andfor . If we let
(56)
andfor
(57)
We have

FAZELI-DEHKORDY et al.: WIDE-BAND COLLABORATIVE SPECTRUM SEARCH STRATEGY 3913
(58)
where we used the fact that andfor .
Here, we aim to derive a relation for expected number of idlechannels identified following the optimal sensing policy. From(14) and (19), and the state transition probabilities in Fig. 4, wecan write
(59)
(60)
(61)
If we let and , wehave the following difference equation:
(62)
where
(63)
and (64)
(65)
with the initial conditions
(66)
Taking -transform on both sides of (62), we obtain
(67)
where is the -transform of . Taking the inverse-transform and solving for , we obtain
(68)
REFERENCES
[1] A. Ghasemi and E. Sousa, “Spectrum sensing in cognitive radionetworks: Requirements, challenges and design trade-offs,” IEEECommun. Mag., vol. 46, no. 4, pp. 32–39, 2008.
[2] D. Cabric, S. Mishra, and R. Brodersen, “Implementation issues inspectrum sensing for cognitive radios,” in Conf. Rec. 38th AsilomarConf. Signals, Syst. Comput., 2004, vol. 1, pp. 772–776.
[3] I. Akyildiz, W. Lee, M. Vuran, and S. Mohanty, “A survey on spectrummanagement in cognitive radio networks,” IEEE Commun. Mag., vol.46, no. 4, pp. 40–48, 2008.
[4] Q. Zhao and B. Sadler, “A survey of dynamic spectrum access,” IEEESignal Process. Mag., vol. 24, no. 3, pp. 79–89, 2007.
[5] A. Sahai, N. Hoven, and R. Tandra, “Some fundamental limits on cog-nitive radio,” in Proc. Allerton Conf. Commun., Contr., Comput., 2004,pp. 1662–1671.
[6] A. Ghasemi and E. Sousa, “Collaborative spectrum sensing for oppor-tunistic access in fading environments,” in Proc. IEEE DySPAN, 2005,pp. 131–136.
[7] J. Oksanen, V. Koivunen, J. Lunden, and A. Huttunen, “Diversity-based spectrum sensing policy for detecting primary signals over mul-tiple frequency bands,” in Proc. IEEE Int. Conf. Acoust., Speech, SignalProcess. (ICASSP), 2010.
[8] C. Cormio and K. Chowdhury, “A survey on MAC protocols for cogni-tive radio networks,” Ad Hoc Netw., vol. 7, no. 7, pp. 1315–1329, 2009.
[9] H. Wang, H. Qin, and L. Zhu, “A survey on MAC protocols for op-portunistic spectrum access in cognitive radio networks,” in Proc. Int.Conf. Comput. Sci. Software Eng., 2008, vol. 1, pp. 214–218.
[10] L. Luo and S. Roy, “Analysis of search schemes in cognitive radio,”in Proc. 2nd IEEE Workshop on Netw. Technol. Software Define RadioNetw., 2007, pp. 17–24.
[11] S. Fazeli-Dehkordy, K. Plataniotis, and S. Pasupathy, “Two-stage spec-trum detection in cognitive radio networks,” in Proc. IEEE Int. Conf.Acoust. Speech Signal Process. (ICASSP), 2010, pp. 3118–3121.
[12] Q. Zhao, L. Tong, A. Swami, and Y. Chen, “Decentralized cognitiveMAC for opportunistic spectrum access in ad hoc networks: A POMDPframework,” IEEE J. Sel. Areas Commun., vol. 25, no. 3, pp. 589–600,2007.
[13] Y. Chen, Q. Zhao, and A. Swami, “Distributed spectrum sensing andaccess in cognitive radio networks with energy constraint,” IEEE Trans.Signal Process., vol. 57, no. 2, pp. 783–797, 2009.
[14] S. Ahmad, M. Liu, T. Javidi, Q. Zhao, and B. Krishnamachari, “Opti-mality of myopic sensing in multichannel opportunistic access,” IEEETrans. Inf. Theory, vol. 55, no. 9, pp. 4040–4050, 2009.
[15] Y. Gai, B. Krishnamachari, and R. Jain, “Learning multiuser channelallocations in cognitive radio networks: A combinatorial multi-armedbandit formulation,” in Proc. IEEE DySPAN, 2010, pp. 1–9.
[16] J. Oksanen, J. Lunden, and V. Koivunen, “Reinforcement learningmethod for energy efficient cooperative multiband spectrum sensing,”in Proc. IEEE Int. Workshop on Mach. Learn. Signal Process. (MLSP),2010, pp. 59–64.
[17] C. Derman and M. Klein, “Some remarks on finite horizon Markoviandecision models,” Operat. Res. , vol. 13, no. 2, pp. 272–278, 1965.
[18] C. Papadimitriou and J. Tsitsiklis, “The complexity of Markov decisionprocesses,” Math. Operat. Res., vol. 12, no. 3, pp. 441–450, 1987.
[19] F. Digham, M. Alouini, and M. Simon, “On the energy detection ofunknown signals over fading channels,” IEEE Trans. Commun., vol.55, Jan. 2007.
[20] M. Win, P. Pinto, and L. Shepp, “A mathematical theory of network in-terference and its applications,” Proc. IEEE, vol. 97, no. 2, pp. 205–230,2009.

3914 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 59, NO. 8, AUGUST 2011
Siavash Fazeli-Dehkordy (S’09) received the B.Sc.degree in electrical engineering from the SharifUniversity of Technology, Tehran, Iran, and theM.Sc. degree in electrical and computer engineeringfrom Queens University, Kingston, Ontario, Canada,in 2006 and 2008, respectively.
He is currently working toward the Ph.D. degreein electrical engineering at the University of Toronto.His current research is in the areas of distributedsignal processing and cooperative communications.
Mr. Fazeli-Dehkordy has received a number ofscholarships, including the Edward S. Rogers, Sr. Graduate Scholarship andthe Ontario Graduate Scholarship.
Konstantinos N. (Kostas) Plataniotis (SM’03) isa Professor with The Edward S. Rogers Sr. De-partment of Electrical and Computer Engineering,University of Toronto, Toronto, Ontario, Canada, andan Adjunct Professor with the School of ComputerScience, Ryerson University, Canada. He is theDirector of The University of Toronto’s KnowledgeMedia Design Institute (www.kmdi.utoronto.ca),and the Director of Research for the Identity, Privacyand Security Institute at the University of Toronto(www.ipsi.utoronto.ca). His research interests in-
clude knowledge media, biometrics, communications systems, and signal andimage processing.
Dr. Plataniotis is a registered Professional Engineer in the province of On-tario, and a member of the Technical Chamber of Greece, and a Fellow of theEngineering Institute of Canada. He is the Editor-in-Chief (2009–2011) for theIEEE SIGNAL PROCESSING LETTERS.
Subbarayan Pasupathy (F’91) was born in Chennai(Madras), Tamilnadu, India. He received the B.E. de-gree in telecommunications from the University ofMadras, the M.Tech. degree in electrical engineeringfrom the Indian Institute of Technology, Madras, andthe M.Phil. and Ph.D. degrees in engineering and ap-plied science from Yale University, New Haven, CT.
Currently, he is a Professor Emeritus with theDepartment of Electrical and Computer Engineering,University of Toronto, Toronto, Ontario, Canada,where he has been a Faculty member since 1972.
His research over the last three decades has mainly been in statistical com-munication theory and signal processing and their applications to digitalcommunications.
Dr. Pasupathy has served as the Chairman of the Communications Groupand as the Associate Chairman of the Department of Electrical Engineering,University of Toronto. He is a registered Professional Engineer in the provinceof Ontario. During 1982–1989, he was an Editor for Data Communicationsand Modulation for the IEEE TRANSACTIONS ON COMMUNICATIONS. He hasalso served as a Technical Associate Editor for the IEEE COMMUNICATIONS
MAGAZINE (1979–1982) and as an Associate Editor for the Canadian ElectricalEngineering Journal (1980–1983). He wrote a regular humor column entitled“Light Traffic” for the IEEE COMMUNICATIONS MAGAZINE during 1984–1998.He was elected as a Fellow of the IEEE in 1991 “for contributions to band-width efficient coding and modulation schemes in digital communication,” wasawarded the Canadian Award in Telecommunications in 2003 by the CanadianSociety of Information Theory, was elected as a Fellow of the Engineering In-stitute of Canada in 2004 and as a Fellow of the Canadian Academy of Engi-neering in 2007. He was honored as a Distinguished Alumnus by the IndianInstitute of Technology (I.I.T.), Madras, in 2010. He has been identified as a“highly cited researcher” by ISI Web of Knowledge and his name is listed inISIHighlyCited.com.
![Spectrum Inference in Cognitive Radio Networks: Algorithms and … · 2019. 12. 16. · 2016 [24] A survey on measurement-based spectrum occupancy modeling for cognitive radios. Spectrum](https://img.pdfslide.us/doc/110x75/5fce0778c537f8132675114b/spectrum-inference-in-cognitive-radio-networks-algorithms-and-2019-12-16-2016.jpg)