Embed Size (px)
Citation preview

The University of Sydney
When applied mathematics collided with algebraNalini Joshi@monsoon0

How do we predict, simulate, or approximate reality?





⇡


98 (4) PNAS (2001) 1341–1346

98 (4) PNAS (2001) 1341–1346
Parabolic Cylinder Functions, Hermite Polynomials, and Gauss-Hermite Quadrature


x

x2 � x+ 2

2x2
x2 � 3

px

ex


2F1(a, b; c;x)


}(x; g2, g3)


Polynomials

a continuous function on a finite subinterval of the real line can be uniformly approximated arbitrarily closely by a polynomial.
Karl Weierstrass

!11
1
x
x2 � 1
x3 � 3x
x4 � 6x2 + 3
...
Pn(x)
...
Example

!12
Z 1
�11 · x · e�x2/2dx = �
he�x2/2
i1�1
= 0
Orthogonality

!12
Orthogonality
Z 1
�1Pm(x)Pn(x) e
�x2/2 dx = 0, if m 6= n

!12
Orthogonality
Z 1
�1Pm(x)Pn(x) e
�x2/2 dx = 0, if m 6= n
| {z }k
< Pm, Pn >

!13
Norm
Z 1
�11 · 1 · e�x2/2dx = 2
Z 1
0e�x2/2dx
=p2⇡

!13
Norm
Z 1
�1Pn(x)Pn(x) e
�x2/2 dx =p2⇡n!

x2 � 1� x · x+ 1 · 1 = 0
3-term Recurrence Relation

P2(x)� xP1(x) + 1 · P0(x) = 0
3-term Recurrence Relation

Pn+1(x)� xPn(x) + nPn�1(x) = 0
3-term Recurrence Relation

Why?
xPn = Pn+1 +nX
j=0
a(n)j Pj
hxPn, Pmi = a(n)m hPm, Pmi, 0 m n
hPn, xPmi = 0, 0 m n� 2

So
hxPn, Pmi = hPn, xPmi) xPn = Pn+1 + anPn + bnPn�1

So
8>><
>>:
an =hxPn, PnihPn, Pni
bn =hxPn, Pni
hPn�1, Pn�1i
hxPn, Pmi = hPn, xPmi) xPn = Pn+1 + anPn + bnPn�1

Classical Polynomials

Z 1
�1Pm(x)Pn(x) e
�x2/2 dx =p2⇡n!�nm
Classical Polynomials

Z 1
�1Pm(x)Pn(x) e
�x2/2 dx =p2⇡n!�nm
Classical weights
Classical Polynomials

Z 1
�1Pm(x)Pn(x) e
�x2/2 dx =p2⇡n!�nm
Classical weights
Hen(x)Hermite polynomials
Classical Polynomials

What other weights are possible?

Shohat (1939)
“The method used is of a very elementary character.”
(AKA Jacques Chokhate)
w(x) =1
Aexp
✓ZB
Adx
◆
= exp
✓� x4
4
◆

Shohat’s resultsZ 1
�1Pm(x)Pn(x) e
�x4/4 dx = 0, if m 6= n

P0(x) = 1
P1(x) = x� c1
Pn(x)� (x� cn)Pn�1(x) + �n Pn�2(x) = 0
Shohat’s resultsZ 1
�1Pm(x)Pn(x) e
�x4/4 dx = 0, if m 6= n
+

P0(x) = 1
P1(x) = x� c1
Pn(x)� (x� cn)Pn�1(x) + �n Pn�2(x) = 0
Shohat’s resultsZ 1
�1Pm(x)Pn(x) e
�x4/4 dx = 0, if m 6= n
+

P0(x) = 1
P1(x) = x� c1
Pn(x)� (x� cn)Pn�1(x) + �n Pn�2(x) = 0
where
Shohat’s resultsZ 1
�1Pm(x)Pn(x) e
�x4/4 dx = 0, if m 6= n
+
�n
��n+1 + �n+2 + �n+3
�= n+ 1

Such weights also arise elsewhere…



Are there more such equations?

Algebra

↵1
↵2
A Reflection

↵1
↵2s1
A Reflection

↵1
↵2s1
//
A Reflection

↵1
↵2s1
//
//
A Reflection

↵1
↵2s1
//
//
A Reflection

↵1
↵2s1 w1(↵2)
//
//
A Reflection

↵1
↵2s1
w1(↵2) = ↵2 � 2(↵1,↵2)
(↵1,↵1)↵1
= (�1,p3) + (2, 0)
= (1,p3)
w1(↵2)
//
//
A Reflection

↵1
↵2
s2
s1↵1 + ↵2
�↵1 � ↵2 �↵2
�↵1
Root system

↵1
↵2
s2
s1↵1 + ↵2
�↵1 � ↵2 �↵2
�↵1are “simple” roots↵1 and ↵2
Root system

↵1
↵2
s2
s1↵1 + ↵2
�↵1 � ↵2 �↵2
�↵1are “simple” roots↵1 and ↵2
Root system
This is a reflection group called A2

↵1
↵2 ↵1 + ↵2
�↵1 � ↵2 �↵2
�↵1
h1
h2
longest rootA2

2
Figure 3. hexagons
A2(1)
lattice

equilateral triangle
a0=0a 1
=0
a2 = 0
s0, s1, s2✑Define to be
On the A2(1) lattice
reflections acrosseach edge

s0(a0, a1, a2) = (�a0, a1 + a0, a2 + a0)
equilateral triangle
a0=0a 1
=0
a2 = 0
s0, s1, s2✑Define to be
On the A2(1) lattice
reflections acrosseach edge

fW(A(1)2 ) = hs0, s1, s2,⇡i
s2j = 1
(sj sj+1)3 = 1
⇡ sj = sj+1 ⇡
9>=
>;j 2 N mod 3
⇡3 = 1
diagram automorphism⇡ :
Coxeter Relations

Figure 1. Triangles inside a cube
Translations
Figure 2. Coordinates
4 40
T1
1
0 2
a 1=0 a
0=0
a2 = 0
Figure 3. 3 triangles
1
Dynamics on the lattice

From reflections, we can show
T1(a0) = a0 + k, T1(a1) = a1 � k, T1(a2) = a2
T1(a0) = ⇡ s2 s1(a0)
= ⇡ s2 (a0 + a1)
= ⇡ (a0 + a1 + 2a2)
= a1 + a2 + 2 a0 = a0 + k
)

a0 a1 a2 f0 f1 f2
s0 �a0 a1 + a0 a2 + a0 f0 f1 +a0f0
f2 �a0f0
s1 a0 + a1 �a1 a2 + a1 f0 �a1f1
f1 f2 �a1f1
s2 a0 + a2 a1 + a2 �a2 f0 +a2f2
f1 �a2f1
f2
Noumi 2004
Group Actions

a0 a1 a2 f0 f1 f2
s0 �a0 a1 + a0 a2 + a0 f0 f1 +a0f0
f2 �a0f0
s1 a0 + a1 �a1 a2 + a1 f0 �a1f1
f1 f2 �a1f1
s2 a0 + a2 a1 + a2 �a2 f0 +a2f2
f1 �a2f1
f2
Noumi 2004
Group Actions

Define
Using
T1(a0) = a0 + 1, T1(a1) = a1 � 1, T1(a2) = a2
un = Tn1 (f1), vn = Tn
1 (f0)
Dynamics on the lattice

Define
Using
T1(a0) = a0 + 1, T1(a1) = a1 � 1, T1(a2) = a2
)
un = Tn1 (f1), vn = Tn
1 (f0)
(un + un+1 = t� vn � a0+n
vn
vn + vn�1 = t� un + a1�nun
Dynamics on the lattice

Define
Using
T1(a0) = a0 + 1, T1(a1) = a1 � 1, T1(a2) = a2
)
A scalar version of this is Shohat’s equation, again.
un = Tn1 (f1), vn = Tn
1 (f0)
(un + un+1 = t� vn � a0+n
vn
vn + vn�1 = t� un + a1�nun
Dynamics on the lattice

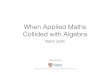
• “String equation” • “discrete first Painlevé equation”
wn (wn+1 + wn + wn�1) = ↵n+ � + � wn
Douglas & Shenker, Nuclear Phys B 1990 Fokas, Its & Kitaev CMP 1991

Eqn 1. Alpha ! 0.25‘, Beta ! 0.‘, Gamma ! "0.5 .!1
!0.5
0
0.5
1
Re!x"!1
!0.50
0.51
Im!x"
!1!0.5
00.51
!1!0.5
00.5
1
Im!x"
!1!0.5
00.51
dP1.nb 1
• “String equation” • “discrete first Painlevé equation”
wn (wn+1 + wn + wn�1) = ↵n+ � + � wn
Douglas & Shenker, Nuclear Phys B 1990 Fokas, Its & Kitaev CMP 1991

Eqn 1. Alpha ! 0.25‘, Beta ! 0.‘, Gamma ! "0.5 .!1
!0.5
0
0.5
1
Re!x"!1
!0.50
0.51
Im!x"
!1!0.5
00.51
!1!0.5
00.5
1
Im!x"
!1!0.5
00.51
dP1.nb 1
• “String equation” • “discrete first Painlevé equation”
wn (wn+1 + wn + wn�1) = ↵n+ � + � wn
Douglas & Shenker, Nuclear Phys B 1990 Fokas, Its & Kitaev CMP 1991

Autonomous Case
K(x, y) = xy2 + x2y � b(x+ y)� cxy
xn
�xn+1 + xn + xn�1
�= b+ cxn
K(xn+1, xn)�K(xn, xn�1) = 0
-2 -1 0 1 2-2
-1
0
1
2
A pencil of elliptic curves
Invariant9

The dynamics are best described by using tools from algebraic geometry.

The Setting
A complex projective surface X obtained by a finite number of blow ups

The Setting
A complex projective surface X obtained by a finite number of blow ups
Irreducible components Dj forming a root system R

The Setting
A complex projective surface X obtained by a finite number of blow ups
Irreducible components Dj forming a root system R
Intersection form (Dk I Dj)

The Setting
A complex projective surface X obtained by a finite number of blow ups
Irreducible components Dj forming a root system R
Intersection form (Dk I Dj)
Dynamical system whose solution trajectories form leaves in a foliated vector bundle

Symmetry Group
The automorphisms of Pic(X)

Symmetry Group
The automorphisms of Pic(X)
that preserve the blow-up structure

Symmetry Group
The automorphisms of Pic(X)
that preserve the blow-up structure that leave R invariant

Symmetry Group
The automorphisms of Pic(X)
⇔ orthogonal complement R⊥ of R
that preserve the blow-up structure that leave R invariant

Theorem (Sakai, 2001). Let X a compact smooth rational surface obtained by blowing up 9 points, equipped with a unique anti-canonical divisor D of canonical type. Then there exists two orthogonal root systems R and R⊥ in the root lattice of D. The Weyl group of R⊥ acts as automorphisms of Pic(X) giving bi-rational actions of X. The translation part of the Weyl group gives rise to discrete Painlevé equations.
Corollary. Degenerate cases of the above give the six Painlevé equations.

This geometric description also leads to dynamical information about their solutions.
Duistermaat & J 2011J & Howes 2014J & Radnovic 2016-2019

Sakai (2001) found 22 classes of such equations.
The translation part of the Weyl group of R⊥
gives iterations of a discrete Painlevé equation.

Sakai (2001) found 22 classes of such equations.
Did Sakai obtain all possible such equations?
The translation part of the Weyl group of R⊥
gives iterations of a discrete Painlevé equation.

New equations and solutions

The RCG equation

The RCG equation✑A reduction of the lattice equation Krichever-Novikov
equation (also known as Adler’s equation or Q4):

The RCG equation✑A reduction of the lattice equation Krichever-Novikov
equation (also known as Adler’s equation or Q4):
cn(�n)dn(�n)�1� k2sn4(zn)
�un
�un+1 + un�1
�
� cn(zn)dn(zn)�1� k2sn2(zn)sn
2(�n)��un+1un�1 + un
2�
+�cn2(zn)� cn2(�n)
�cn(zn)dn(zn)
�1 + k2un
2un+1un�1
�= 0
zn = (�e + �o)n+ z0, �n =
(�e, for n = 2 j
�o, for n = 2j + 1.
whereRamani, Carstea &Grammaticos, J Phys A 2009

A0(1)

What is the symmetry group of the equation?

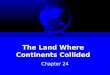
E8
• An 8-dimensional root system containing 240 root vectors.
• All root vectors have the same length √2.
• The roots span a polytope, known as the 421 polytope.
Wikipedia CC BY-SA 3.0

E8(1) Lattice
Q =8X
k=1
Z↵k, Q_ =8X
k=1
Z↵_k , P =
8X
k=1
Zhk,
Augmented with
Finite root system
↵0
↵0 + e↵ = 0
where
e↵ = 2↵1 + 4↵2 + 6↵3 + 5↵4 + 4↵5 + 3↵6 + 2↵7 + 3↵8

E8(1) Reflections
s0 : (↵0,↵7) 7! (�↵0,↵7 + ↵0), s1 : (↵1,↵2) 7! (�↵1,↵2 + ↵1),
s2 : (↵1,↵2,↵3) 7! (↵1 + ↵2,�↵2,↵3 + ↵2),
s3 : (↵2,↵3,↵4,↵8) 7! (↵2 + ↵3,�↵3,↵4 + ↵3,↵8 + ↵3),
s4 : (↵3,↵4,↵5) 7! (↵3 + ↵4,�↵4,↵5 + ↵4),
s5 : (↵4,↵5,↵6) 7! (↵4 + ↵5,�↵5,↵6 + ↵5),
s6 : (↵5,↵6,↵7) 7! (↵5 + ↵6,�↵6,↵7 + ↵6),
s7 : (↵6,↵7) 7! (↵6 + ↵7,�↵7), s8 : (↵3,↵8) 7! (↵3 + ↵8,�↵8).

E8(1) TranslationsFor any roots ↵,� 2 Q the corresponding translations satisfy
T↵ � T� = T↵+�
For any w 2 W (E(1)8 ) we have
w � T↵ = Tw(↵) � w
T↵(�) = �
Moreover, translation acts as an identity on a root vector
|T↵|2 := h↵_,↵i
Define the length of a translation by

Lengths of translationsFor any ↵,� 2 Q if the translations T↵, T� are conjugate
then|T↵|2 = |T� |2
w � T↵ � w�1 = T�i.e. w 2 W (E(1)8 )for some
Proof.
Tw(↵) = T�
Conjugacy implies
|T↵|2 = |Tw(↵)|2 = |T� |2So we have

Two translations
T (M) = s1238432543865432765438076543212345670834567234568345234832
T (JN) = s25645348370675645234832156453483706756452348321706734830468Murata, 2003
J. & Nakazono, J. Phys. A 2017
T (M) = T↵1 ,
T (JN) = T↵0+2↵2+4↵3+4↵4+4↵5+3↵6+2↵7+2↵8
|T↵1 |2 = 2,
|T↵0+2↵2+4↵3+4↵4+4↵5+3↵6+2↵7+2↵8 |2 = 4.
Or, in terms of roots
of different lengths

Inside the lattice
Fix a point on the lattice.
It has 240 nearest neighbours lying at a distance whose squared length is equal to 2.
E(1)8
It has 2160 next-nearest neighbours lying at a distance whose squared length is equal to 4.
) T (M)
) T (JN)

E8 Weight Lattice

✑ For each vertex, 240 nearest-neighbours, reached by vectors of squared length 2.
E8 Weight Lattice
Sakai’s elliptic difference equation

✑ For each vertex, 240 nearest-neighbours, reached by vectors of squared length 2.
E8 Weight Lattice
✑ For each vertex, 2160 next-nearest-neighbours, reached by vectors of squared length 4.
Sakai’s elliptic difference equation
A new elliptic difference equation

✑ For each vertex, 240 nearest-neighbours, reached by vectors of squared length 2.
E8 Weight Lattice
✑ For each vertex, 2160 next-nearest-neighbours, reached by vectors of squared length 4.
Sakai’s elliptic difference equation
A new elliptic difference equation
• Ramani, Carstea, Grammaticos (2009)• Atkinson, Howes, J. and Nakazono
(2016)

✑ For each vertex, 240 nearest-neighbours, reached by vectors of squared length 2.
E8 Weight Lattice
✑ For each vertex, 2160 next-nearest-neighbours, reached by vectors of squared length 4.
Sakai’s elliptic difference equation
A new elliptic difference equation
• Ramani, Carstea, Grammaticos (2009)• Atkinson, Howes, J. and Nakazono
(2016)• J. and Nakazono (2017, 2019)• Carstea, Dzhamay, Takenawa (2017)

Symmetry of RCG equation

Symmetry of RCG equation
• The RCG equation has - initial value space A0(1)
- symmetry group F4(1) , a subgroup of E8(1)
- time iteration which is a “square root” of a translation on this lattice.

Symmetry of RCG equation
• The RCG equation has - initial value space A0(1)
- symmetry group F4(1) , a subgroup of E8(1)
- time iteration which is a “square root” of a translation on this lattice.
Ell: E(1)
8
Mul: E(1)
8 E(1)
7 E(1)
6 A(1)
3 A(1)
4 (A2 +A1)(1) (A1 +A1)(1)
A(1)
10
A(1)
0A(1)
1
Add: E(1)
8 E(1)
7 E(1)
6 D(1)
4 A(1)
3 2A(1)
1 A(1)
10 A(1)
0
A(1)
2 A(1)
1 A(1)
0
1

Symmetry of RCG equation
• The RCG equation has - initial value space A0(1)
- symmetry group F4(1) , a subgroup of E8(1)
- time iteration which is a “square root” of a translation on this lattice.
Ell: E(1)
8
Mul: E(1)
8 E(1)
7 E(1)
6 A(1)
3 A(1)
4 (A2 +A1)(1) (A1 +A1)(1)
A(1)
10
A(1)
0A(1)
1
Add: E(1)
8 E(1)
7 E(1)
6 D(1)
4 A(1)
3 2A(1)
1 A(1)
10 A(1)
0
A(1)
2 A(1)
1 A(1)
0
1
F4(1)

Symmetry of RCG equation
• The RCG equation has - initial value space A0(1)
- symmetry group F4(1) , a subgroup of E8(1)
- time iteration which is a “square root” of a translation on this lattice.
Ell: E(1)
8
Mul: E(1)
8 E(1)
7 E(1)
6 A(1)
3 A(1)
4 (A2 +A1)(1) (A1 +A1)(1)
A(1)
10
A(1)
0A(1)
1
Add: E(1)
8 E(1)
7 E(1)
6 D(1)
4 A(1)
3 2A(1)
1 A(1)
10 A(1)
0
A(1)
2 A(1)
1 A(1)
0
1
F4(1)

The University of Sydney
At least four elliptic-difference equations
J. and Nakazono, 2017, 2019
TJ,1
TJ,2
RJ,2RJ,1
Sakai 2001
RCG 2009

Special solutions given by 10E9 elliptic hypergeometric functions.
Kajiwara, Masuda, Noumi, Ohta, Yamada, 2003Kajiwara, Noumi, Yamada, 2017

What are the dynamics of its general solutions?

What are the dynamics of its general solutions?
OPEN