Embed Size (px)
Citation preview

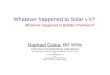
Artificial legs of the future may be controlied by the same messages from the braintapped at various thigh muscles (far lefi)-that control normal limbs.
When ~he ~:t:3 At"noi:COil maiherfaiiiieianNorbert Wiener Introduced the concept ofcybernetics In 1947, his goai was to expandthe bluiuyi\;Ci; '-iUrlcept of "homeostasis"-the equilibrium between variousfunctions In the human body-to cover theentire fls!d of control arid communicationtheory, whether In machines or animals.Tha term was derived from the Greek wordluI' !~htfiftiSnicln/~ and tne concept grewfrom observations by bioloqists that control of voluntary movement In animalsshowed striking similarities to the behaviorof servomachanlsms.
Biologists Quickly adopted the servoprincipia to explain how, for example, hormones secreted by various glands regulategrowth; how the kidney-acting as anInfinite-gain servo-regulates bloodpressure indirectly by regulating bioodvolume; and howmuscle systemsfunction.As most engineers know, cybernetics hasalso contributed to robotics and artificialintelligence; but they :'n~y net ~nc':: th::tbiomedical engineers, using cyberneticprinciples to Improve the functions of artlficlailimbs, areclose at last to fulfilling adream described by Wiener in 1951: thebuilding of artificial limbs that can doalmost all natural functions because theyare controlled by bioelectric messagesfrom the arnoutee's brain-the same tvoesof messages the brain would have sent tothe muscles in a natura! Hrr.::;.
The messages from the brain, which canbe picked up by tiny electrodes placed onthe muscles of the stump of the amputatedlimb, would be relayed to a microprocessor- or eiectromechanlcally-basedcontroller in the ait:ficial limb. The controller would be programmed to recognizesuch messages-caHad myoelectric signals (myo refers to muscle)-and convertthem into corresponding motions of theknee, elbow, wrist, or fingers. The iTiOt!onsare Implementea tnrough torquing motorsor pneumatic or hydraulic pistons.
several types of the cybernetic limbsnow in university laboratories will be testedclinically In about two years. They ared~s~gned fo!' the severest cases-amputations above the knee or elbow-and will beeasier to use and maintain as weUas morenatural than current devices,says GordonD. Moskowitz, director of the Moss-TempleDrexel H6habmtation Engineering centerIn PiiiiaJ"ipilia
Cybernetic t .' .:,<'\are needed, Mr.Moskowitz points out, oecause present limbs-
operated by cables or hydraulics and activated by brute mechanical forces In adjacent mu~!es or Inadequate myoelectriccontrol systems-require long training andgreat concentration to use and are limitedin function.
Although VGi;OUS tecnnlcat pfuuitnTISdeiayed the development of cyberneticlimbs, the main reasons for the long delayificiude the reiaiiveiy small market for themand the lack of coofdiFiaieu effort by thehealth-care systems that serve the averageamputee: according to Mr. Moskowitz andRobert 'Iv. Mann, Whitaker Professor ofBiomedical Engineering at the Massachusetts institute of Technology In Cambridge.Funding has tneretorebaanilmlted andih~
devices have been developed In just ahandful of university centers. Besides thework done in Philadelphia and at MIT,cybernetic limb oroararns ara run hv {lllli.
ley-S.Childress at No'rthwestem-UnlversltY,Evanston, III.; Richard B. Stein at theI I "luAPeI." ,..1 AlhA 1_ r" ....__~_. :;';;-;..-......._...._._.~I _. ,...,.~.~ "' "'-'U"QUQ, ...--K"IuglL IYI.
SCott at the University of New Brunswick,Canada; and S.C. Jacobsen at the University of Utah, Salt Lake City.
On the technical side, two developmentsIn recent years have made the cyberneticlimb feasible: (1)techniques for quickly processing the Inherently noisy myoelectricsianals to obtain adeauate sianal-to-nolseratlos-and relatively dlstortlon4ree signals;and (2) methods for automaticallydiscriminating between different mvoelectric patterns and matching them- totheir corresponding motions (knee or_ .... _ ••• £1_••1___ _ __..... :___ _11__••• __
alUUw t!~~~~:::i UI aAlall~IUII:t, II:'IUUYV UI
wrist torques, and so on).The muscle signals picked up by an elec
trode are noisy because the measuredvoltagas aiGthe vectorsumof signals emanating from thousands of muscle fiberswith different time constants. The spacingof electrodes Introduces addltiona: noiseand cii~iofiivn caused by fc'iI"llvc ulfterences in-the time of arrival of signals at themeasuring points.
To optimize slgnal-ta-nolse ratios, engineers In some laboratories use statisticalmethods from modern control theory. Forexample, an approach called the "optimalestimator" works as follows: A microprocessor continually computes the bestposslbie estimate oi tne signal by combining the nc;~y s;gnal with one representing amodel of the tissue and electrode actionsthat cause the noise. iha noise model isImplemented with a white-noise signal
passed through a shaping tiiter. A simplerapproach, perhaps just as adequate, process= ih{; signal with a bancpaee filterthat removes high-frequency noise, followed by logarithmic amplification to proteet against overrangfng and maintain thesignal despite poor electrode contact.Finally, envelope detection yields a dcenllivsllAnt nf tho QI"",o.
-'Most-oi the·~y~~t~ic-pattern classlfleiS hawQ so far t~n des~unEd for art~f~c:Ja~
arms. The first such arms-the so-calledTemp!e, Boston, and Utah arms {as weH asthe "SwedIsh niSF10 t j - 08veioped controlslana's from eorreletlons ~tween. 810"818from different muscles In the shoulder andthe desired elbow torques. Basically, howevai, they used only the total energy in themvoelectric ~innAI frnm a alven muscle-on ths -premlsethat-this gave a reasonatse~~.lmQtA nf t~- ~-.- ""f 1""'1 'Q~lo l'.nntrAt'..-
tl~~~~hlle ig~;i;~a;u~'h··d~t;iied-sig~;.tures of the signal as the patterns from different muscles. The most advanced suchdevice-the Utah arm designed by Dr.Jacobsen-is based on an experimentallyprovsdmodet that correlates sIgnalsrepresenting shoulder and collarbonetorques with elbow and wrist torques.
The state of the art In cybernetic legs Isa device designed by Woodruff Flowers, aprofessor of -biomedical engineering atMIT, which has a fixed walking rate oversmooth surfaces only; in climbing steps,the amputee drags the prosthesis to thestep just reached by the normal leg. Thetorques at the knee are damped by is fili~fu
pioceSSoi-i6gulatad eddy-currant brake.Byadjusting slide potentiometers, the usercan tell the microprocessor to commandvaried damping profiles as needed forstanding stili, sitting, walking, or swingingdown stairs, for example.
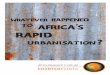
Amore advanced leg Is being developedat the Moss-ierilp;e-Orexal canter and willbe tested clinicaiiy ill two years, says Mr.Moskowitz. The device Is based on adesign by Donald R. Myers, a former doctoral student now with the National Bureauof Standards in Washington, D.C. [seefigure].
The "Philadelphia leg" works on tne principle that when an amputee Imagines themissing 11mb making certain knee actions,the myoelectric signals in the stump will besimilar, on average, to those measured innormal subjects. (Mr. Moskowitz and Mr.Myers say they have confirmed that principle In experiments.) During a trainingperiod, data are collected with which pattern Classifiers!n the art!!k~; ;~ wi;; ;&tQrrecognize the imagined kiieii actlcns,
CONTROLFORCE
VELOCITY
i;LtC{ffOOES
tFRONT
iB~~/'
MUSCLESITES FOR ELECTRODES
24 IEEE spectrum APRIL 1982

Onedeviceoutof200... Oneboard outof 10... Twosystems outof 5
Howarespectable 0.5% devicefailure rale can turn intoa,~nft/. ,,- I........ "-., --. .~!I~ If.... , _----~ I ~ _~~~ _~_
3M Center, St. Paul, MN 55144. Oreal!toll-free: 1-800-328-1684(in Minnesota:' ~1-800-792-1072). =tJPacket also includes 1·literature on 3M'e f!.!!! --~ '..line of sta.tic control ~_'3Rproducts, plus 2. 'Yatechnical reports on -~ - •electrostatic discharge. _,----------
I Name ----------
I Title Pnone----
I Company
I Address
L_ ~:~~State, Zi~
r - - - - - - - i3M: Please send details on your Total •
I StaticControl program, I, ~ } Have a 3M representative contact me. I
IIII
____ ..J
ponents at static safeguardedwork areas.
(2) Transport all static-sensitivecomponents in static shieldingpackages or containers.
Perhapsyou've already partiallyimplemented these rules in your plantand even in the field.
But with so much to aain, isn't it timeyou considered a prO~lralll for TotalStatic Control?
This is where 3M can help.in addition to a full line of static control products, we offer seminars,surveys,employee training and otherelements to help you pian and manaqeboth the technical and the humanaspects of a comprehensive program.May we send you details? Just returnthe coupon to: StaticControl SystemsDivision,3~..~, Dept. IES042,, 225-48(1) Handle al! static-sensitivecom-
Even if only one static-damageddevice out of every 200escapes yournotice, the result can bea disaster.Figuringthat each PCboardhas 20devices,a 0.5% device failure ratemeans one out of 10boardswill fail.Put 5 boards into a systemand the ratecompounds to 4C~{'.
Count up the costs, the losttime, andthe biemished reputation, and you'llsee why taking a new approachto yourstatic problems can be one of the mostprofitable moves your company canmake.
Prevention, not detection,is the solution.VVhen you rely on detection, you're onthe defensive. But apply the following2 basic rules of static controi,and youtake the positive approach:
Total controlof thestatic inyourbusiness 3M Hears YOU •••
-iEEE spectrum APRIL 1982 Circle No.7 2S