Embed Size (px)
Citation preview

1
What is RADAR?
(RAdio Detection And Ranging)
Presentation on April 8, 2019, by
Chris StewartPresident/COO
Pocket Radar, Inc.

What is RADAR? (RAdio Detection And Ranging)
RADAR is a method of using electromagnetic waves to determine the position (range and direction), velocity and identifying characteristics of targets.
2

The Basics
Waves Reflect
3

The BasicsDoppler Shift
4

The Basics

“RADAR” = RAdio Direction And Ranging
Some Examples of Applications using RADAR:
DefenseWeatherSecurity SystemsAutomotiveGuidance SystemsLaw EnforcementSportsAutomatic Door OpenersAgricultureNavigationMotion SensingTank Level SensingTraffic SafetyMilitaryHealth CareHandicap Assistance DevicesWater Flow
Collision AvoidanceOceanographyMappingGeologySelf Driving CarsAir Traffic ControlUnderground SearchesBoat SafetyAstronomyImagingRoboticsForensicsSearch and RescueOil Slick TrackingAtmospheric StudiesLandmine DetectionRailway Safety
6

• Faraday - Electromagnetic Induction (~ 1831)
• Doppler – Discovery of the Doppler Effect (~ 1842)
• Maxwell - Theory of Electromagnetic Waves (~ 1865)
• Hertz - Demonstration of Electromagnetic Waves (~ 1887)
• Tesla - Invention of Radio and the Resonant Circuit (~ 1897)
• Hülsmeyer – Telemobiloscope: First working RADAR (~ 1903)
• Armstrong - Superheterodyne Receiver (~ 1918)
• Marconi - Proposal of RADAR concepts (~ 1922)
• Watson-Watt – Working RADAR systems in the UK (~ 1935)
Early History:
7

First Working RADAR:
The Telemobiloscope:
The Telemobiloscope was primarily a spark-gap transmitter connected to an array of dipole antennas, with a coherer based receiver and a parabolic antenna that could rotate 360 degrees. While the transmitted signal had a broad coverage, the receiving antenna was narrowly focused. When a reflected signal reached the receiver, a relay was actuated and, in turn, rang an electric bell.
8

WWII Era RADAR:
The H2S was the first ground-scanning radar to be mounted on an aircraft, and made it possible to find long-range targets at night and in bad weather from 1943 on.
9

Ground Penetrating RADAR:
Through the Wall RADAR:
10

Types of RADAR
PrimaryRADAR
SecondaryRADAR
CWRADAR
UnmodulatedCW RADAR
RADAR
FM CWRADAR
Active Response to RADAR Signal
Passive Response to RADAR Signal
PulseRADAR
MTI PulseRADAR
Pulse DopplerRADAR

Types of RADAR
PrimaryRADAR
SecondaryRADAR
CWRADAR
UnmodulatedCW RADAR
RADAR
FM CWRADAR
Active Response to RADAR Signal
Passive Response to RADAR Signal
PulseRADAR
MTI PulseRADAR
Pulse DopplerRADAR

Pulse RADAR:
The maximum non-ambiguous range is:
Rna = (PRI-PW)·c/2
where: c =1
μ0ξ0= the speed of light
Good for long distance range measurements but not instantaneous velocity, trade-offs with choice of PRI and Pulse Width, Problems with “Clutter”
C=1Μ 0 ϵ 0 − − − − √ C=1Μ0ϵ0
C=1Μ 0 ϵ 0 − − − − √ C=1Μ0ϵ0

Pulse Radar
Basic Radar Uses On/Off Keying of a CW Waveform
t
14

Pulse Radar
Pulse Distortion
Long returns from P1 causes distortion to the returns of P2
15

Pulse Radar
Range Ambiguity
c
16

Pulse Radar
Pulse Range
• Speed of travel for radio waves = Speed of Light = c• c = 3x108 meters/sec = .984x109 feet/sec• So a Radar pulse travels about 1 foot in a nanosecond
17

Types of Pulse RADAR
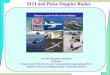
Moving Target Indicator (MTI) and Pulse-Doppler RADAR
• MTI (Moving Target Indicator) RadarThe MTI radar uses low pulse repetition frequency (PRF) to avoid range ambiguities, but these radars can have Doppler ambiguities. Helps distinguish moving objects from fixed objects to remove Clutter
• Pulse Doppler RadarContrary to MTI radar, pulse Doppler radar uses high PRF to avoid Doppler ambiguities, but it can have numerous range ambiguities
18

Types of RADAR
PrimaryRADAR
SecondaryRADAR
CWRADAR
UnmodulatedCW RADAR
RADAR
FM CWRADAR
Active Response to RADAR Signal
Passive Response to RADAR Signal
PulseRADAR
MTI PulseRADAR
Pulse DopplerRADAR

Continuous Wave (CW) RADAR:
fD = 2·v/λ
fD = Doppler Frequency [Hz]λ = wavelength of transmitted signal [m]v = speed of the moving object [m/s]
Good for velocity measurements but does not determine range.Simple CW RADAR does not distinguish direction.
20

Continuous Wave (CW) RADAR:
fD = 2·v/λ
fD = Doppler Frequency [Hz]λ = wavelength of transmitted signal [m]v = speed of the moving object [m/s]
Good for velocity measurements but does not determine range.Simple CW RADAR does not distinguish direction.
Calculate fD in Hz per MPH = 2/λc = 186,000 Miles per sec * 3600 sec per Hour c = 669,600,000 Miles per Hourλ = c/fc = 669,600,000 MPH/24.125 GHz = .0278fD = 2/.0278 = 72 Hz per MPH
21

Example of Simple CW RADAR
Low-cost CW RADAR module is used for door openers and alarm systems.

Types of CW RADAR
• UnmodulatedAn example of unmodulated CW radar is the speed radar used by the police. The transmitted signal of these equipment is constant in amplitude and frequency. CW radar transmitting unmodulated power can measure the speed by using the Doppler-effect. It cannot measure a range and it cannot differ between two reflecting objects.
• ModulatedRange can be added to CW radars by using the frequency shifting method. In this method, a signal that constantly changes in frequency around a fixed reference is used to detect stationary objects. Frequency is swept repeatedly between f1 and f2. On examining the received reflected frequencies (and with the knowledge of the transmitted frequency), range calculation can be done. If the target is moving, there is additional Doppler frequency shift which can be used to find if target is approaching or receding.Frequency-Modulated Continuous Wave radars (FMCWs) are used in Radar Altimeters.

Sawtooth modulationThis modulation pattern is used in a relatively large range (maximum distance) combined with a negligible influence of Doppler frequency (for example, a maritime navigation radar).
Triangular modulationThis modulation allows easy separation of the difference frequency Δf of the Doppler frequency fD
Square-wave modulation (simple frequency-shift keying, FSK)This modulation is used for a very precise distance measurement at close range by phase comparison of the two echo signal frequencies. It has the disadvantage, that the echo signals from several targets cannot be separated from each other, and that this process enables only a small unambiguous measuring range.
Stepped modulation (staircase voltage)This is used for interferometric measurements and expands the unambiguous measuring range.
Sawtooth
Triangular
Rectangular
Staircase Voltage
FMCW Modulation Patterns:There are several possible modulation patterns which can be used for different measurement purposes:

Modulated CW RADAR: Sawtooth Modulation
The maximum non-ambiguous range is:
Rna = c·T/2
Mod / Demod
Range = Δt·c/2 The time delay is calculated as follows: Δt = T·Δf/(f2-f1) where: f2 = maximum frequency f1 = minimum frequency T = period of sweep from f1 to f2, Δf is the difference between transmitted and received frequencyΔf = ((f2-f1)/ T)·((2·d)/c)where d = distance to target
25

FSK RADARCan determine velocity and range on moving objects

FMCW RADAR with Triangle Wave ModulationCan determine range on fixed objects or moving objects and velocity of moving objects

uW Amplifier
uW Amplifier uW Amplifier
IF Amplifier
Horn Antenna
Horn Antenna
Isolator
Isolator
Mixer
Low Pass Filter
Directional Coupler
FFT Signal Analyzer
fD = (2·v)/λ
Continuous Wave RADAR Demo System: Velocity Measurement
Oscillator
28

Modulated CW RADAR Demo System: Distance Measurement
uW Amplifier
uW Amplifier uW Amplifier
IF Amplifier
Horn Antenna
Horn Antenna
Isolator
Isolator
Mixer
Low Pass Filter
Directional Coupler
Voltage Controlled Oscillator
Trigger In
Sweep Ramp
FFT Signal Analyzer
Theory: Δf = ((f2-f1)/ T)·((2·d)/c)
Sweep (Hz/sec) Delay (sec)
29

Modulated CW RADAR Demo System: Distance Measurement
uW Amplifier
uW Amplifier uW Amplifier
IF Amplifier
Horn Antenna
Horn Antenna
Isolator
Isolator
Mixer
Low Pass Filter
Directional Coupler
Voltage Controlled Oscillator
Trigger In
Sweep Ramp
FFT Signal Analyzer
Actual: Δf = ((f2-f1)/ T)·(((2·d)/c)+τg)
Sweep (Hz/sec) Delay (sec)
Free Space
GroupDelay
30

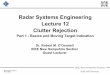
Basic RADAR Range Equation: (Monostatic = Single Antenna)
σ = RADAR Cross Section (RCS) is a measure of how much radar energy is reflected back to the source. The factors that influence RCS include:The material of which the target is made;The absolute size of the target;The relative size of the target, (in relation to the wavelength of the illuminating radar);The incident angle, (angle at which the radar beam hits a particular portion of target which depends upon shape of target and its orientation to the radar source);The reflected angle (angle at which the reflected beam leaves the part of the target hit, it depends upon incident angle);The polarization of transmitted and the received radiation in respect to the orientation of the target
31

More Complete RADAR Equation: (Monostatic = Single Antenna)

Power Density vs. Range
33

Key Enabling Technology:
Gunnplexer
Klystron
Magnetron

Antennas:
Most communications systems want to have omnidirectional antennas that cover all directions equally. RADAR antennas want to focus the radio waves into a narrow beam so that they only cover a small angle so that the operator can resolve the specific direction of the target.
“Ideally” radiates equally in all directions
Radiates most of the energy in a specific direction

Antennas:
Horn Parabolic Reflector Patch Array
36

Stealth Technology: How to Minimize the Radar Cross Section
𝑍0 =μ0ξ0
~ 377 𝑂ℎ𝑚𝑠Characteristic Impedance of Free Space:
Its All About The Angles: Another stealth tactic is to make sure the surfaces that reflect radio waves do not reflect the signal directly back to the source.
When an electromagnetic wave encounters a matched impedance the energy is absorbed and not reflected. If you can make an object out of materials that have the same characteristic impedance as free space then they will have minimal reflection of radio waves.
37

Questions ?

Homework for LAB Class: (For a given fstart, fstop, Tsweep and τg)
Create Spreadsheet to Graph Predicted and Measured Freq vs Distance
uW Amplifier
uW Amplifier uW Amplifier
IF Amplifier
Horn Antenna
Horn Antenna
Isolator
Isolator
Mixer
Low Pass Filter
Directional Coupler
Voltage Controlled Oscillator
Trigger In
Sweep Ramp
FFT Signal Analyzer
Actual: Δf = ((f2-f1)/ T)·(((2·d)/c)+τg)
Sweep (Hz/sec) Delay (sec)
Free Space
GroupDelay
8360
3561
Fmin=7 GHzFmax=13 GHzTs_min=20 msTs_max=100ms
τg_min= 1 ns
τg_max= 5 ns
Where: d = Distance
40

y = 50.8x + 680.6
y = 52.56x + 680.6
-
500
1,000
1,500
2,000
2,500
3,000
0 5 10 15 20 25 30 35 40
Difference Freq versus Range
Calc Freq Meas Linear (Calc Freq) Linear (Meas)
Δf (Hz)
Distance (inches)

Review Questions:
• What does RADAR stand for?
• When was the first working RADAR system deployed?
• What is the Doppler equation?
• How long does it take a radio signal to travel 1000 feet?
• What is “non-ambiguous range”?
• What is “RCS”?
• What type of RADAR can measure speed?
• What type of RADAR can measure distance?

Back-up Slides

Early History:
Acoustic “RADAR” ~ 1920s and 1930s
44

The 40’s
45

The 50’s
46

The 70’s
47

The 90’s