Embed Size (px)
DESCRIPTION
What are roots of the Wilkinson polynomial?. Zhonggang Zeng. Northeastern Illinois University. May 12, 2001. Can you solve ( x - 1.0 ) 100 = 0. Can you solve x 100 - 100 x 99 + 4950 x 98 - 161700 x 97 + 3921225 x 96 - ... - 100 x + 1 = 0. The Wilkinson polynomial - PowerPoint PPT Presentation
Citation preview
What are roots of the Wilkinson polynomial?
Zhonggang Zeng
Northeastern Illinois University
May 12, 2001
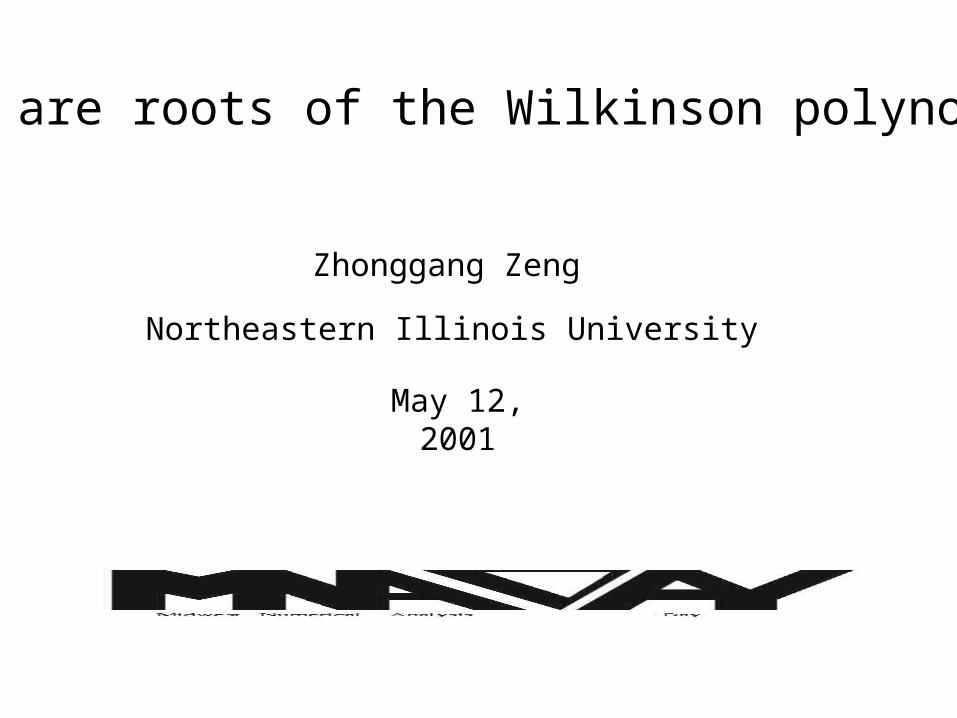
Can you solve (x-1.0 )100 = 0 Can you solve
x100-100 x99 +4950 x98 - 161700 x97+3921225x96 - ... - 100 x +1 = 0
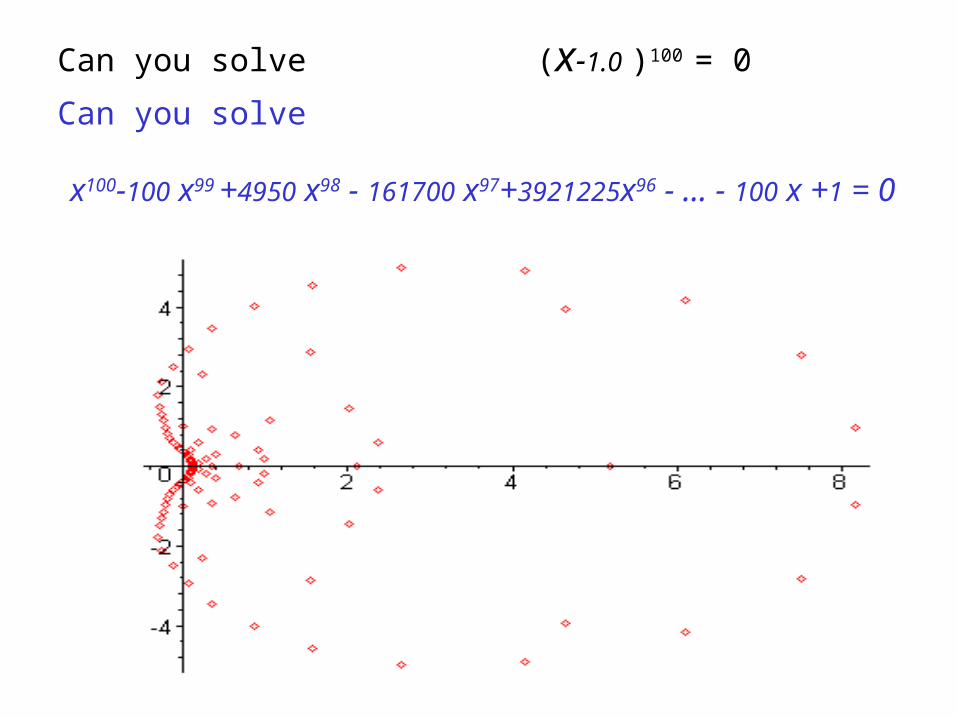
The Wilkinson polynomial
p(x) = (x-1)(x-2)...(x-20) = x20 - 210 x19 + 20615 x18 + ...
Wilkinson wrote in 1984:
Speaking for myself I regard it as the most traumatic experience in my career as a numerical analyst.
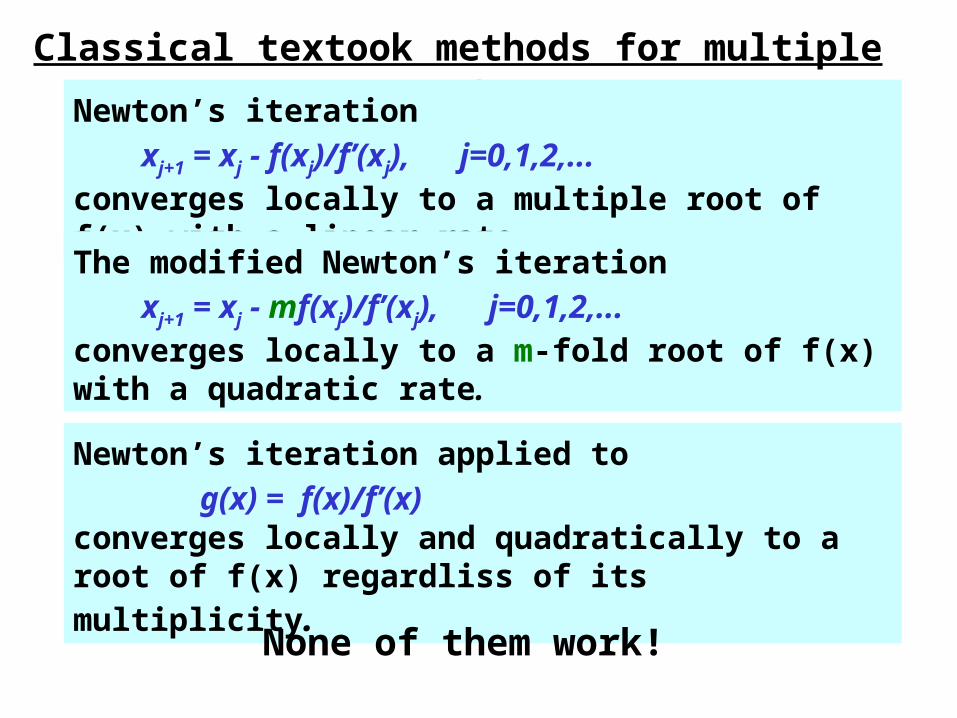
Classical textook methods for multiple roots
Newton’s iteration xj+1 = xj - f(xj)/f’(xj), j=0,1,2,...converges locally to a multiple root of f(x) with a linear rate.
The modified Newton’s iteration xj+1 = xj - mf(xj)/f’(xj), j=0,1,2,...converges locally to a m-fold root of f(x) with a quadratic rate.
Newton’s iteration applied to g(x) = f(x)/f’(x)converges locally and quadratically to a root of f(x) regardliss of its multiplicity.
None of them work!
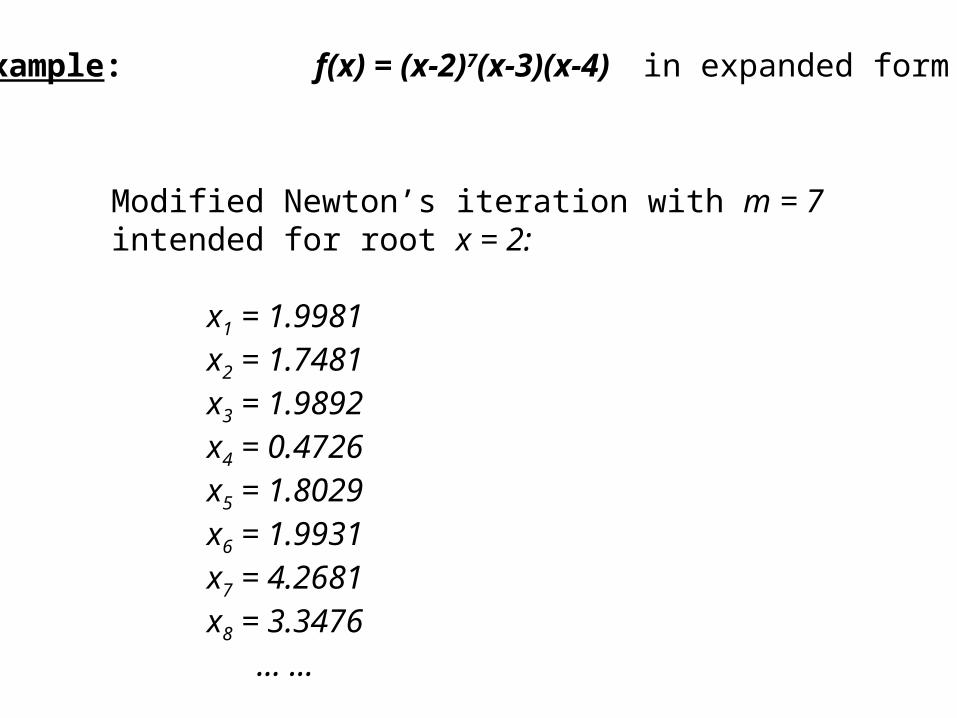
Example: f(x) = (x-2)7(x-3)(x-4) in expanded form.
Modified Newton’s iteration with m = 7 intended for root x = 2:
x1 = 1.9981x2 = 1.7481x3 = 1.9892x4 = 0.4726x5 = 1.8029x6 = 1.9931x7 = 4.2681x8 = 3.3476 ... ...
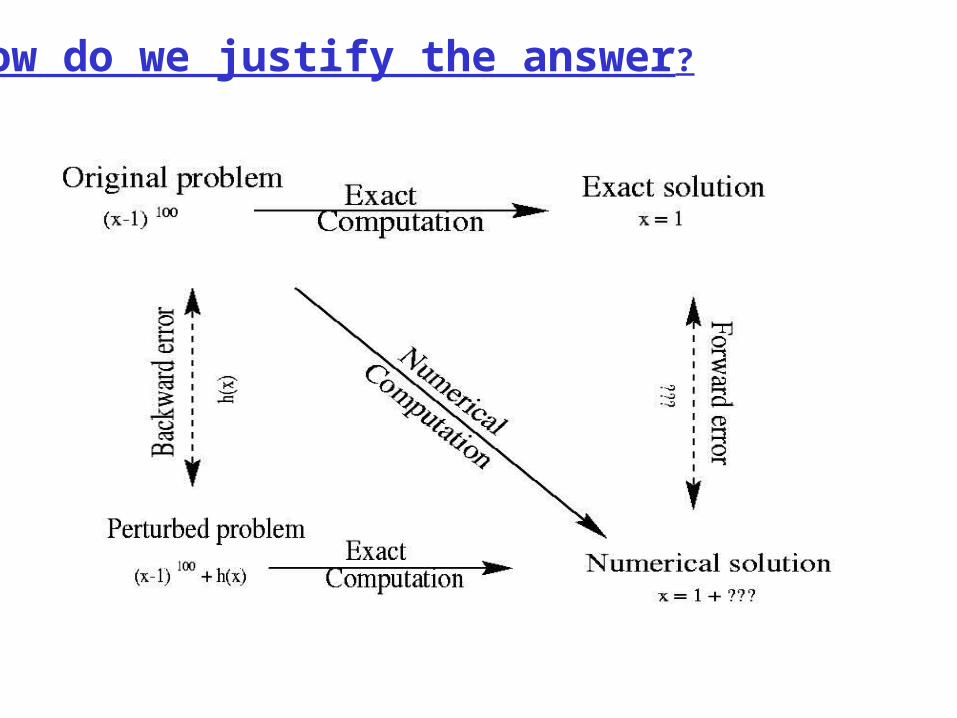
How do we justify the answer?
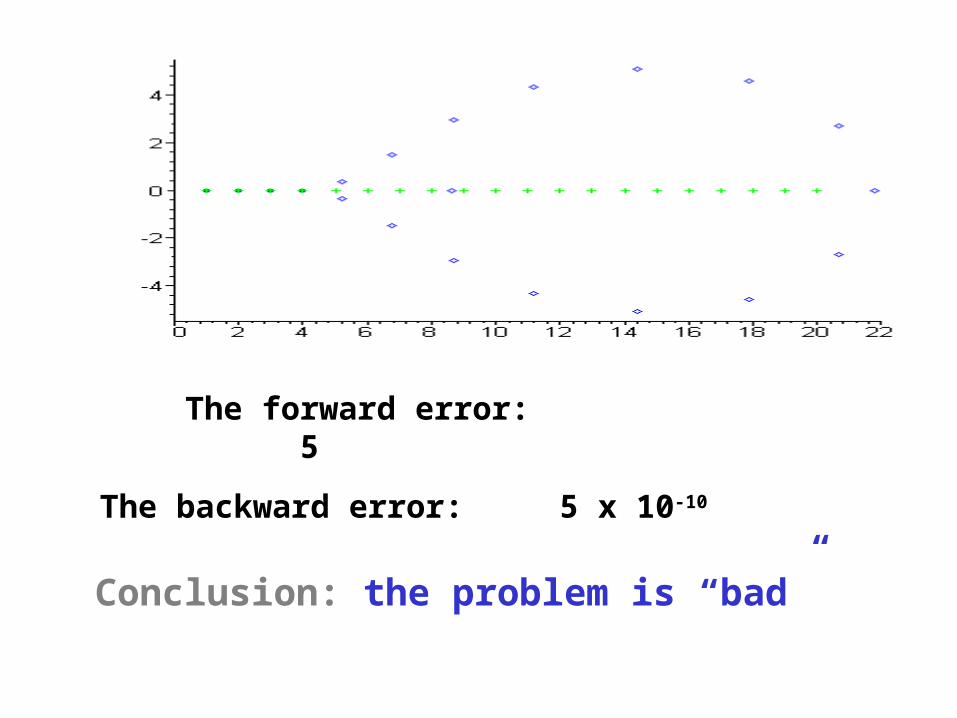
The backward error: 5 x 10-10
The forward error: 5
Conclusion: the problem is “bad”
If the answer is highly sensitive to perturbations, you have probably asked the wrong question.
Maxims about numerical mathematics, computers, science and life, L. N. Trefethen. SIAM News
Who is asking a wrong question?
What is the wrong question?
A: “Customer”
B: Numerical analyst
A: The polynomial
B: The computing subject
The question we used to ask:
Given a polynomialp(x) = xn + a1 xn-1+...+an-1 x + an
find ( z1, ..., zn ) such thatp(x) = ( x - z1 )( x - z2 ) ... ( x - zn )
Right - or - Wrong ?
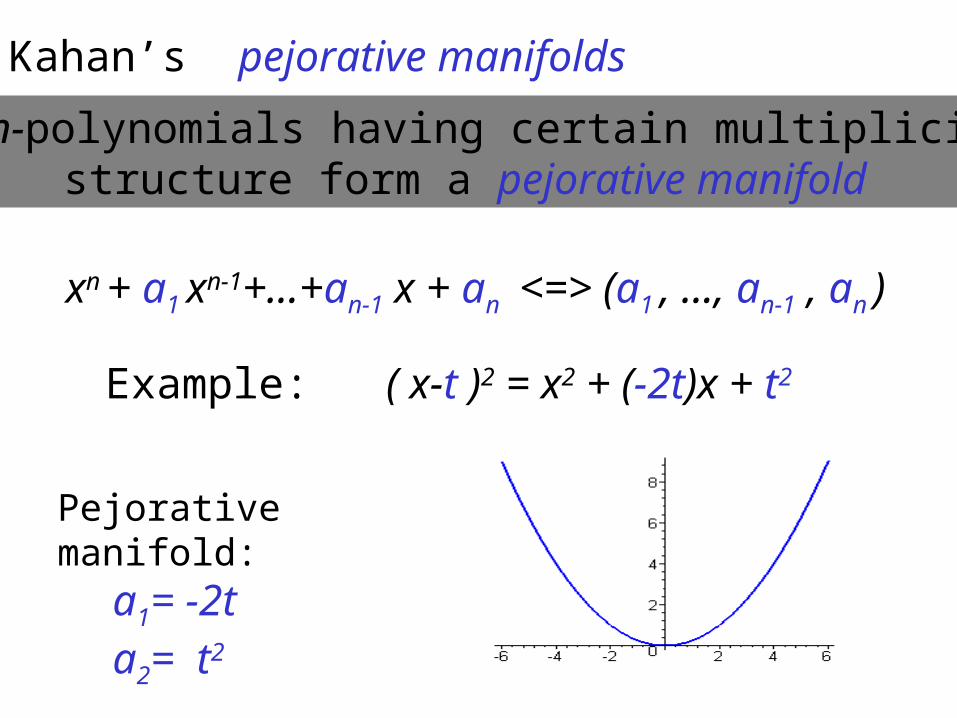
Kahan’s pejorative manifolds
xn + a1 xn-1+...+an-1 x + an <=> (a1 , ..., an-1 , an )
All n-polynomials having certain multiplicity structure form a pejorative manifold
Example: ( x-t )2 = x2 + (-2t)x + t2
Pejorative manifold: a1= -2t a2= t2
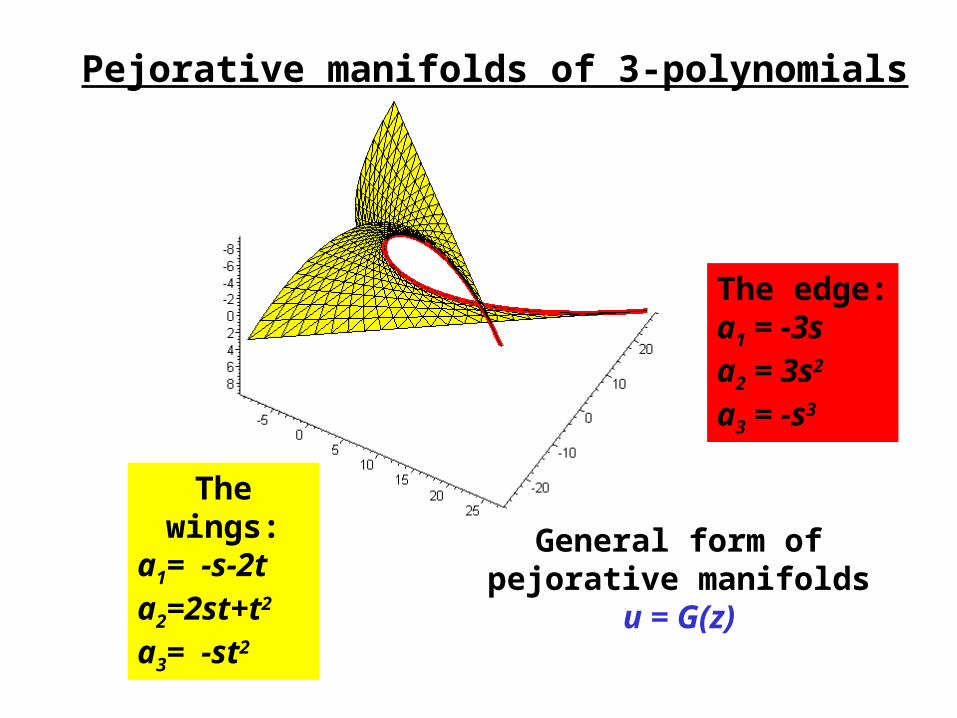
Pejorative manifolds of 3-polynomials
The wings:a1= -s-2ta2=2st+t2
a3= -st2
The edge:a1 = -3sa2 = 3s2
a3 = -s3
General form ofpejorative manifolds
u = G(z)
W. Kahan, Conserving confluence curbs ill-condition, 1972
1. Ill-condition occurs when a polynomial is near a pejorative manifold.
2. A small “drift” by a polynomial on that pejorative manifolddoes not cause large forward error to the multiple roots, except
3. If a multiple root is sensitive to small perturbation on thepejorative manifold, then the polynomial is near a pejorativesubmanifold of higher multiplicity.
Ill-condition is caused by solving polynomialequations on a wrong manifold
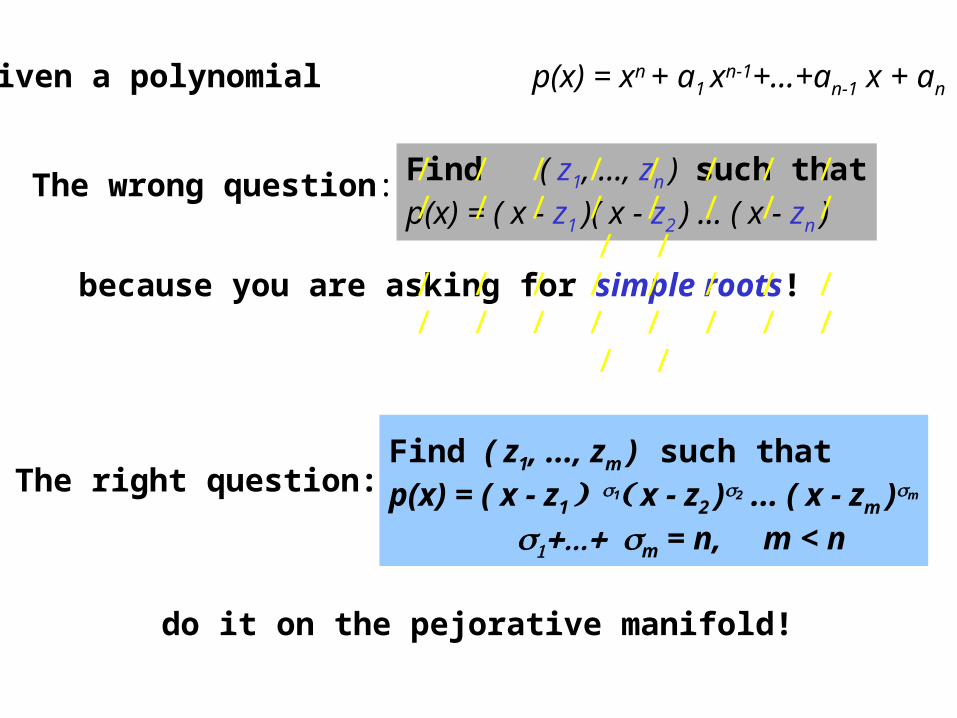
Given a polynomial p(x) = xn + a1 xn-1+...+an-1 x + an
The wrong question: Find ( z1, ..., zn ) such thatp(x) = ( x - z1 )( x - z2 ) ... ( x - zn )
because you are asking for simple roots!
/ / / / / / / / / / / / / / / / / // / / / / / / / / / / / / / / / / /
The right question:Find ( z1, ..., zm ) such thatp(x) = ( x - z1 1 x - z2 )2 ... ( x - zm )m
m = n, m < n
do it on the pejorative manifold!
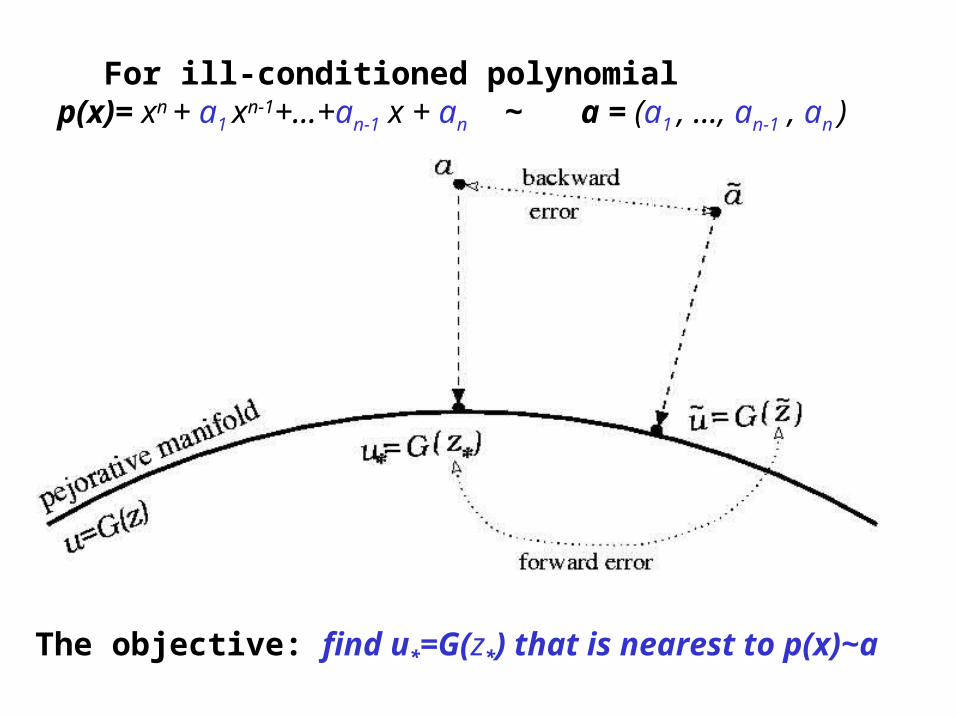
For ill-conditioned polynomial p(x)= xn + a1 xn-1+...+an-1 x + an ~ a = (a1 , ..., an-1 , an )
The objective: find u*=G(z*) that is nearest to p(x)~a
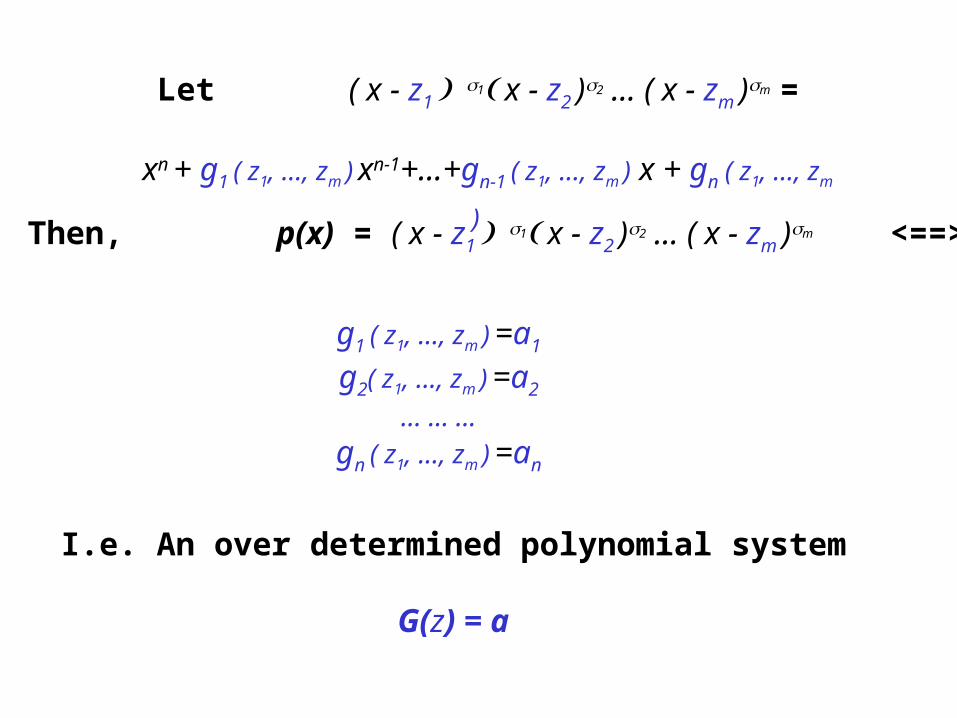
Let ( x - z1 1 x - z2 )2 ... ( x - zm )m =
xn + g1 ( z1, ..., zm ) xn-1+...+gn-1 ( z1, ..., zm ) x + gn ( z1, ..., zm )
Then, p(x) = ( x - z1 1 x - z2 )2 ... ( x - zm )m <==>
g1 ( z1, ..., zm ) =a1
g2( z1, ..., zm ) =a2
... ... ...
gn ( z1, ..., zm ) =an
I.e. An over determined polynomial system
G(z) = a
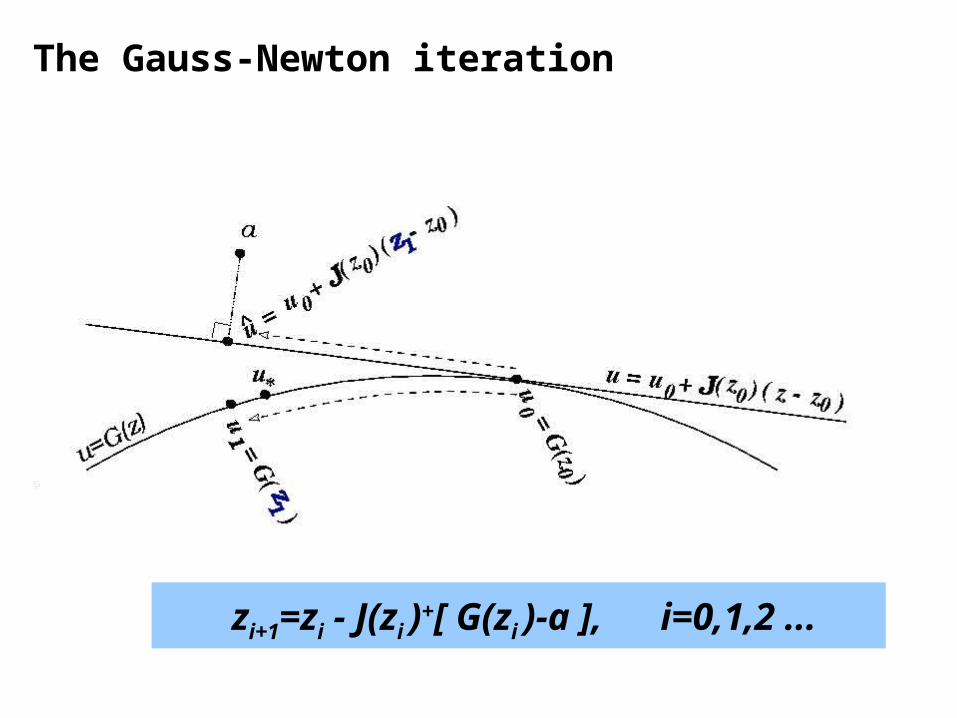
The Gauss-Newton iteration
zi+1=zi - J(zi )+[ G(zi )-a ], i=0,1,2 ...
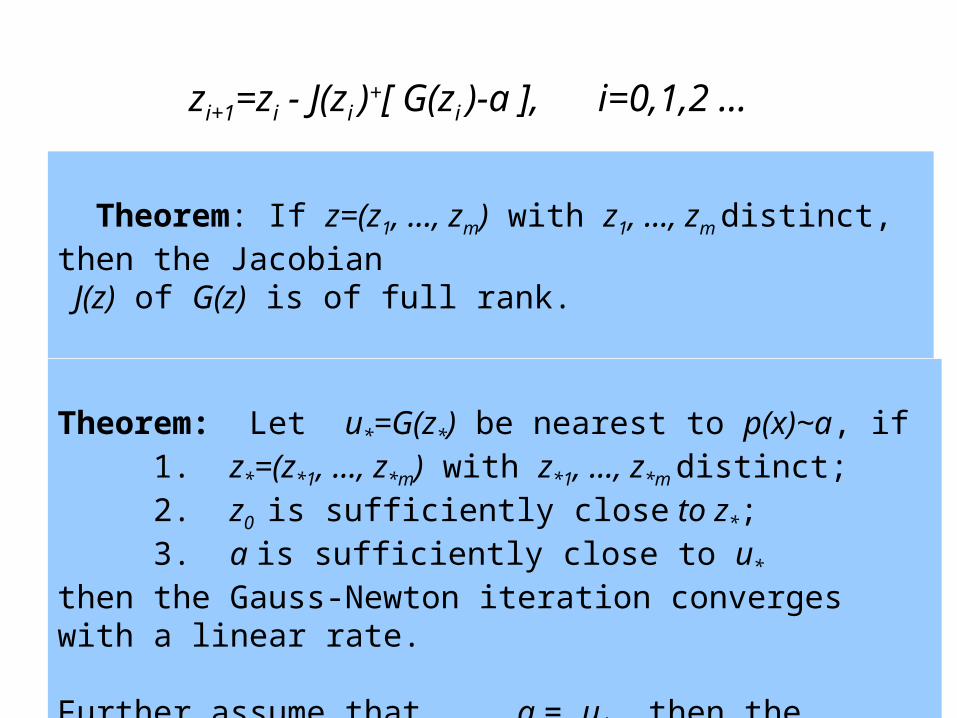
Theorem: Let u*=G(z*) be nearest to p(x)~a, if1. z*=(z*1, ..., z*m) with z*1, ..., z*m distinct;2. z0 is sufficiently close to z*;3. a is sufficiently close to u*
then the Gauss-Newton iteration converges with a linear rate.
Further assume that a = u* , then the convergence is quadratic.
Theorem: If z=(z1, ..., zm) with z1, ..., zm distinct, then the Jacobian J(z) of G(z) is of full rank.
zi+1=zi - J(zi )+[ G(zi )-a ], i=0,1,2 ...
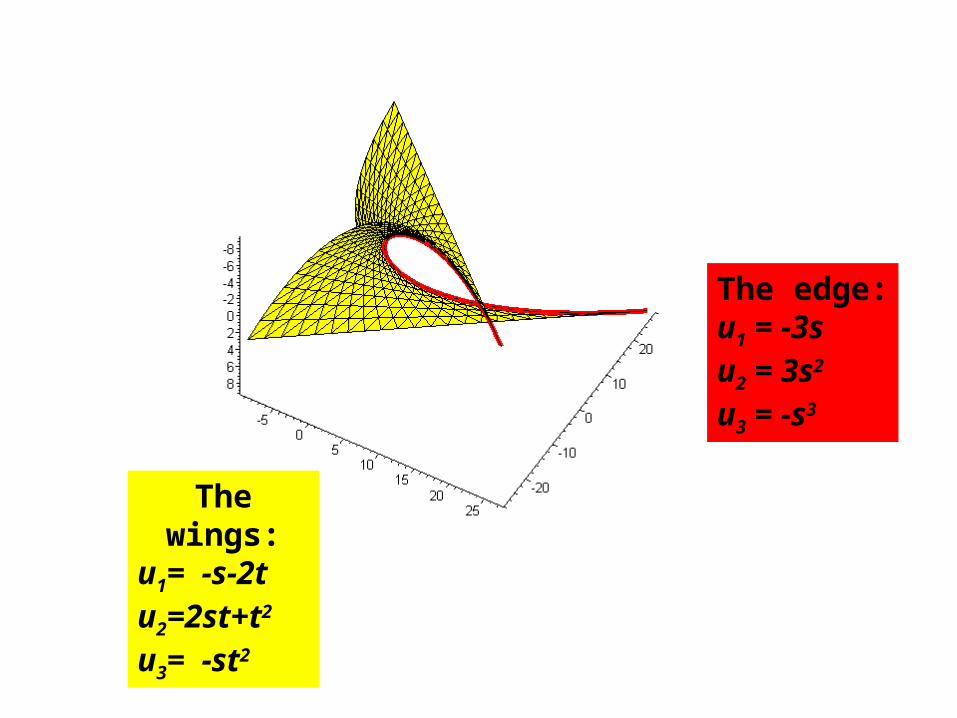
The wings:u1= -s-2tu2=2st+t2
u3= -st2
The edge:u1 = -3su2 = 3s2
u3 = -s3
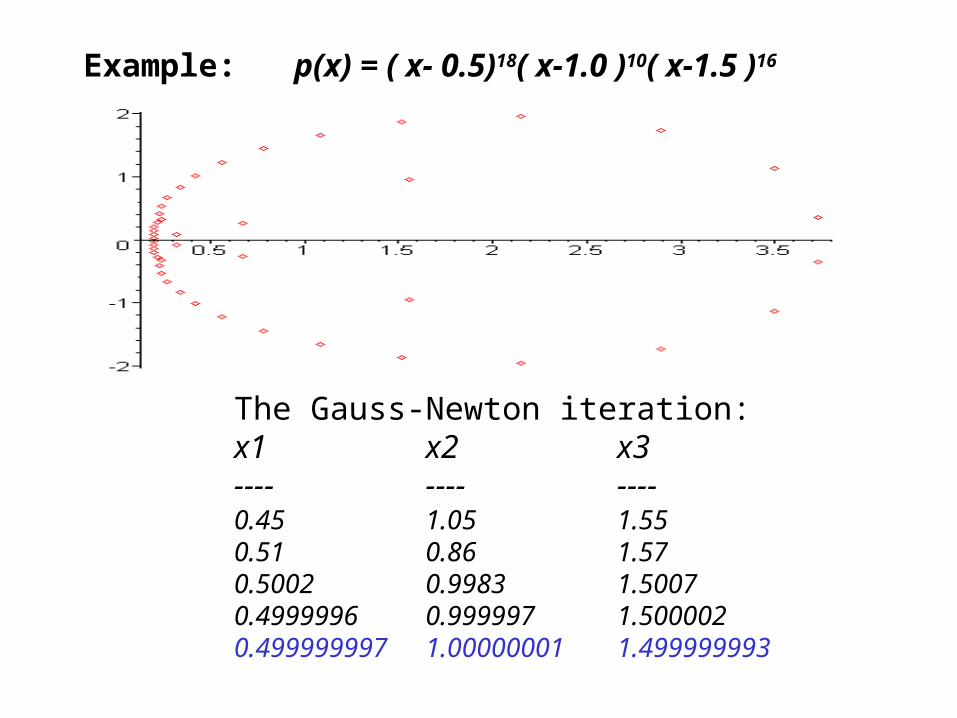
Example: p(x) = ( x- 0.5)18( x-1.0 )10( x-1.5 )16
The Gauss-Newton iteration:x1 x2 x3---- ---- ----0.45 1.05 1.550.51 0.86 1.570.5002 0.9983 1.50070.4999996 0.999997 1.5000020.499999997 1.00000001 1.499999993
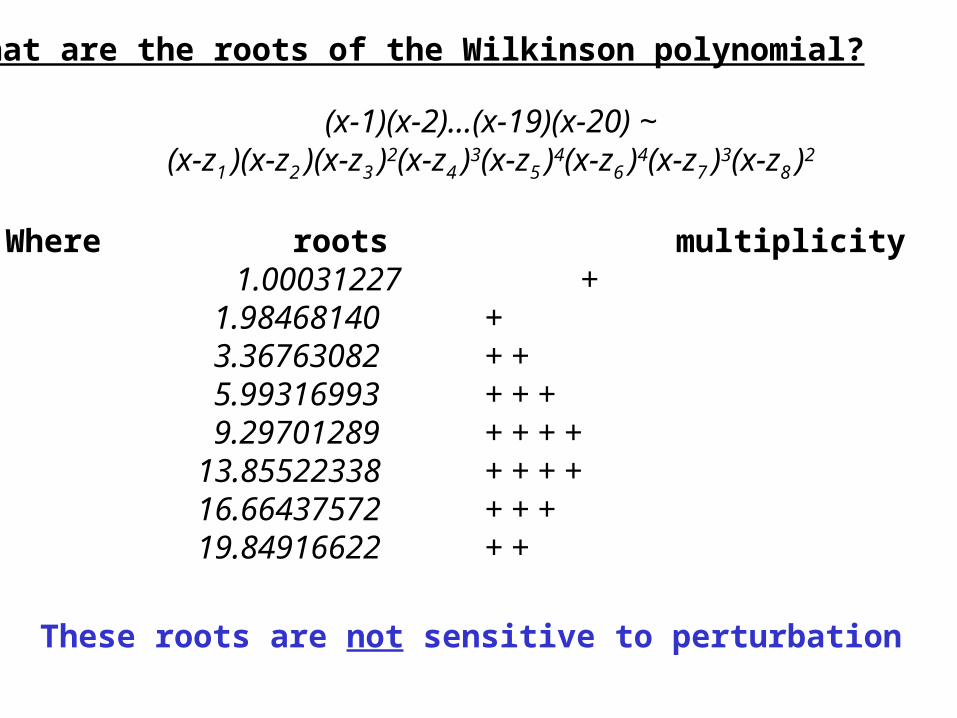
What are the roots of the Wilkinson polynomial?
(x-1)(x-2)...(x-19)(x-20) ~(x-z1 )(x-z2 )(x-z3 )2(x-z4 )3(x-z5 )4(x-z6 )4(x-z7 )3(x-z8 )2
Where roots multiplicity 1.00031227 + 1.98468140 + 3.36763082 + + 5.99316993 + + + 9.29701289 + + + +13.85522338 + + + +16.66437572 + + +19.84916622 + +
These roots are not sensitive to perturbation
Conclusion
Ill-condition is caused by a wrong “identity”.
Multiple roots are stable and can be computed with high accuracy, if they are calculated on a proper pejorative manifold.
As a related work, isolated multiple roots/eigenvalues can be computed as simple, stable zeros of an extended polynomial system with high accuracy.





















![Polynomial Ideals Euclidean algorithm Multiplicity of roots Ideals in F[x]](https://img.pdfslide.us/doc/110x75/56649cf45503460f949c2c78/polynomial-ideals-euclidean-algorithm-multiplicity-of-roots-ideals-in-fx.jpg)