-
Proceedings of IMPACT 2013
-
IMPACT 2013
Proceedings of the
3rd International Workshop onPolyhedral Compilation
Techniques
Berlin, GermanyJanuary 21, 2013
in conjunction with HiPEAC 2013
Workshop organizers and proceedings editors:
Armin GrößlingerLouis-Noël Pouchet
-
Each article in these proceedings is copyrighted by its
respective authors.
-
Acknowledgements
The program chairs are grateful to the members of the program
committee for their incrediblework, time commitment and dedication
during the review process for IMPACT 2013. We arealso grateful to
the authors who submitted to IMPACT, Albert Cohen for his keynote
speech,and all participants and attendees of IMPACT 2013 in
Berlin.
IMPACT 2013 in Berlin, Germany (in conjuction with HiPEAC 2013)
is the third workshop in aseries of international workshops on
polyhedral compilation techniques. The previous workshopswere held
in Chamonix, France (2011) in conjuction with CGO 2011 and Paris,
France (2012) inconjuction with HiPEAC 2012.
iii
-
iv
-
Contents
Committees 1
Tiling & Dependence Analysis
David G. Wonnacott, Michelle Mills StroutOn the Scalability of
Loop Tiling Techniques . . . . . . . . . . . . . . . . . . . . . .
. . . 3
Tomofumi Yuki, Sanjay RajopadhyeMemory Allocations for Tiled
Uniform Dependence Programs . . . . . . . . . . . . . . . . 13
Sven Verdoolaege, Hristo Nikolov, Todor StefanovOn Demand
Parametric Array Dataflow Analysis . . . . . . . . . . . . . . . .
. . . . . . . 23
Parallelism Constructs & Speculation
Imèn Fassi, Philippe Clauss, Matthieu Kuhn, Yosr SlamaMultifor
for Multicore . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 37
Dustin Feld, Thomas Soddemann, Michael Jünger, Sven
MallachFacilitate SIMD-Code-Generation in the Polyhedral Model
byHardware-aware Automatic Code-Transformation . . . . . . . . . .
. . . . . . . . . . . . . 45
Johannes Doerfert, Clemens Hammacher, Kevin Streit, Sebastian
HackSPolly: Speculative Optimizations in the Polyhedral Model . . .
. . . . . . . . . . . . . . 55
v
-
vi
-
Organizers and Program ChairsArmin Größlinger (University of
Passau, Germany)Louis-Noël Pouchet (University of California Los
Angeles, USA)
Program CommitteeChristophe Alias (ENS Lyon, France)Cédric
Bastoul (INRIA, France)Uday Bondhugula (IISc, India)Philippe Clauss
(University of Strasbourg, France)Albert Cohen (INRIA, France)Alain
Darte (ENS Lyon, France)Paul Feautrier (ENS Lyon, France)Martin
Griebl (University of Passau, Germany)Sebastian Hack (Saarland
University, Germany)François Irigoin (MINES ParisTech, France)Paul
Kelly (Imperial College London, UK)Ronan Keryell (Wild
Systems/Silkan, USA)Vincent Loechner (University of Strasbourg,
France)Benoît Meister (Reservoir Labs, Inc., USA)Sanjay Rajopadhye
(Colorado State University, USA)P. Sadayappan (Ohio State
University, USA)Michelle Mills Strout (Colorado State University,
USA)Nicolas Vasilache (Reservoir Labs, Inc., USA)Sven Verdoolaege
(KU Leuven/ENS, France)
Additional ReviewersSomashekar BhaskaracharyaRoshan
DathathriAlexandra JimboreanAthanasios KonstantinidisAndreas
Simbürger
1
-
2
-
On the Scalability of Loop Tiling Techniques
David G. WonnacottHaverford College
Haverford, PA, U.S.A. [email protected]
Michelle Mills StroutColorado State University
Fort Collins, CO, U.S.A. [email protected]
ABSTRACTThe Polyhedral model has proven to be a valuable tool
forimproving memory locality and exploiting parallelism for
op-timizing dense array codes. This model is expressive enoughto
describe transformations of imperfectly nested loops, andto capture
a variety of program transformations, includingmany approaches to
loop tiling. Tools such as the highly suc-cessful PLuTo automatic
parallelizer have provided empiri-cal confirmation of the success
of polyhedral-based optimiza-tion, through experiments in which a
number of benchmarkshave been executed on machines with small- to
medium-scaleparallelism.
In anticipation of ever higher degrees of parallelism, we
haveexplored the impact of various loop tiling strategies on
theasymptotic degree of available parallelism. In our analysis,we
consider “weak scaling” as described by Gustafson, i.e.,in which
the data set size grows linearly with the number ofprocessors
available. Some, but not all, of the approaches totiling provide
weak scaling. In particular, the tiling currentlyperformed by PLuTo
does not scale in this sense.
In this article, we review approaches to loop tiling in
thepublished literature, focusing on both scalability and
imple-mentation status. We find that fully scalable tilings are
notavailable in general-purpose tools, and call upon the
polyhe-dral compilation community to focus on questions of
asymp-totic scalability. Finally, we identify ongoing work that
mayresolve this issue.
1. INTRODUCTIONThe Polyhedral model has proven to be a valuable
tool forimproving memory locality and exploiting parallelism for
op-timizing dense array codes. This model is expressive enoughto
express a variety of program transformations, includingmany forms
of loop tiling, which can improve cache line uti-lization and avoid
false sharing [16, 37, 36], as well as in-crease the granularity of
concurrency.
For many codes, the most dramatic locality improvementsoccur
with time tiling, i.e., tiling that spans multiple itera-tions of
an outer time-step loop. In some cases, the degreeof locality can
increase with the number of time steps in atile, providing scalable
locality [39]. For non-trivial exam-ples, time tiling often
requires loop skewing with respect tothe time step loop [27, 39],
often referred to as time skew-ing [39, 38]. This transformation
typically involves imper-fectly nested loops, and was thus not
widely implemented
before the adoption of the polyhedral approach. However,the
PLuTo automatic parallelizer [19, 6] has demonstratedconsiderable
success in obtaining high performance on ma-chines with moderate
degrees of parallelism by using thistechnique to automatically
produce OpenMP parallel code.
Unfortunately, the specific tiling transformations that havebeen
implemented and released in tools like PLuTo involvepipelined
execution of tiles, which prevents full concurrencyfrom the start.
The lack of immediate full concurrency issometimes dismissed as a
start-up cost that will be triv-ially small for realistic problem
sizes. While this may betrue for the degrees of parallelism
provided by current multi-core processors, this choice of tiling
can impact the asymp-totic degree of concurrency available if we
try to scale updata set size and machine size together, as
suggested byGustafson [15]. Furthermore, Van der Wijngaart et al.
[35]have modeled and experimentally demonstrated the load
im-balance that occurs on distributed memory machines whenusing the
pipelined approach.
In this paper, we review the status of implemented and pro-posed
techniques for tiling dense array codes (including theimportant
sub-case of stencil codes) in an attempt to de-termine whether or
not the techniques that are currentlybeing implemented are well
suited to machines with higherdemands for parallelism and control
of memory traffic andcommunication. The published literature on
tiling for auto-matic parallelization seems to be divided into two
disjointcategories: “practical” papers describing implemented
butunscalable techniques for automatic parallelizers for densearray
codes, and “theoretical” papers describing techniquesthat scale
well but are either not implemented or not inte-grated into a
general automatic parallelizer.
In Section 2 of this paper, we discuss that the approach
cur-rently used by PLuTo does not allow full scaling as describedby
Gustafson [15]. In Section 4, we survey other tilings thathave been
suggested in the literature, classify each approachas fully
scalable or not, and discuss its implementation sta-tus in current
automatic parallelization tools. We also ad-dress recent work by
Bondhugula et al. [3] on a tiling tech-nique that we believe will
be scalable, though asymptoticscaling is not addressed in [3].
Section 5 presents our con-clusions: we believe the
scalable/implemented dichotomy isan artifact of current design
choices, not a fundamental lim-itation of the polyhedral model, and
can thus be addressedvia a shift in emphasis by the research
community.
3
-
// update N pseudo-random seeds T times
// assumes R[ ] is initialized
for t = 1 to T
for i = 0 to N-1
S0: R[i] = (a*R[i]+c) % m
Figure 1: “Embarrassingly Parallel” Loop Nest.
2. TILING AND SCALABILITYIn his 1988 article “Reevaluating
Amdahl’s Law” [15],Gustafson observed that, in actual practice,
“One does nottake a fixed size problem and run it on various
numbers ofprocessors”, but rather “expands [the problem] to make
useof the increased facilities”. In particular, in the
successfulparallelizations he described, “as a first approximation,
theamount of work that can be done in parallel varies linearlywith
the number of processors”, and it is “most realistic toassume run
time, not problem size, is constant”. This formof scaling is
typically referred to as weak scaling or scal-able parallelism, as
opposed to the strong scaling needed togive speed-up proportional
to the number of processors fora fixed-size problem.
Weak scaling can be found in many data parallel codes, inwhich
many elements of a large array can be updated simul-taneously.
Figure 1 shows a trivial example that we will useto introduce our
diagrammatic conventions (following [38]).In Figure 2 each
statement execution/loop iteration is drawnas an individual node,
with sample values given to symbolicparameters. The time axis, or
outer loop, moves from leftto right across the page. The grouping
of nodes into tiles isillustrated with variously shaped boxes
around sets of nodes.Arrows in the figure denote direction of flow
of informationamong iterations or tiles. Line-less arrowheads
indicate val-ues that are live-in to the space being illustrated.
(Whencomparing our figures to other work, note that
presentationstyle may vary in several ways: some authors use a time
axisthat moves up or down the page; some draw data depen-dence arcs
from a use to a definition, thus pointing into thedata-flow like a
weather vane; some illustrate tiles as rectan-gular grids on a
visually transformed iteration space, ratherthan with varied shapes
on the original iteration space.)
Figure 2 makes clear the possibility of both (weak)
scalableparallelism and scalable locality. In the execution of a
tileof size (τ × σ), i.e., τ iterations of the t (time) loop and
σiterations of the i (data) loop, data-flow does not prevent
Pprocessors from concurrently executing P such tiles. Eachtile
performs O(σ × τ) computations and has O(σ) live-inand live-out
values; if each processor performs all updates ofone data element
before moving to the next, O(τ) operationscan be performed with
O(1) accesses to main memory.
Inter-iteration data-flow can constrain, or even prevent,
scal-able parallelism or scalable locality. For the code in Figure
1,we can scale up parallelism by increasing N and P , or wecan
scale up locality by increasing T with the machine bal-ance.
However, beyond a certain point (i.e., σ = 1), we canno longer use
additional processors to explore ever increas-ing values of T for a
given N . (An increase in CPU clockspeed might help in this
situation, though beyond a certainpoint it would likely not help
performance for increasing N
1 2 3 4 5
i
1
3
4
5
6
2
7
t
0
Figure 2: Iteration Space of Figure 1 with T=5, N=8,tiled with τ
= 5, σ = 4.
for a given T .)
As we show in the next two sections, scalable parallelismmay be
constrained not only by the fundamental data-flow,but also by the
approach to parallelization.
3. PIPELINED PARALLELISMIn a Jacobi stencil computation, each
array element isupdated as a function of its value and its
neighbors’values, as shown (for a one-dimensional array) in Fig-ure
3. Thus, we must perform time skewing to tile theiteration space
(except in the degenerate case of τ = 1,which prevents scalable
locality). Figure 4 illustrates theusual tiling performed by
automatic parallelizers suchas PLuTo, though for readability our
figure shows farfewer loop iterations per tile. Nodes represent
execu-tions of statement S1; for simplicity, executions of S2are
not shown. (The same data-flow also arises from adoubly-nested
execution of the single statement A[t%2,i]=
(A[(t-1)%2,i-1]+2*A[(t-1)%2,i]+A[(t-1)%2,i+1])/4,but some tools may
not recognize the program in this form.)
Array data-flow analysis [11, 22, 23] is well understood
forprograms that fit the polyhedral model, and can be usedto deduce
the data-flow arcs from the original imperativecode. The data-flow
arcs crossing a tile boundary describethe communication between
tiles; in most approaches totiling for distributed systems,
inter-processor communica-tion is aggregated and takes place
between executions oftiles, rather than in the middle of any tile.
The topology ofthe inter-tile data-flow thus gives the constraints
on possibleconcurrent execution of tiles. For Figure 4, concurrent
ex-
4
-
for t = 1 to T
for i = 1 to N-2
S1: new[i] = (A[i-1]+2*A[i]+A[i+1])/4
for i = 1 to N-2
S2: A[i] = new[i]
Figure 3: Three Point Jacobi Stencil.
1 2 3 4 5
i
1
3
4
5
6
2
7
t
8
Figure 4: Iteration Space of Figure 3 with T=5,N=10, tiled with
τ = 2, σ = 4.
ecution is possible in pipelined fashion, in which executionof
tiles progresses as a wavefront that begins with the lowerleft
tile, then simultaneously executes the two tiles border-ing it
(above and to the right), and continues to each waveof tiles
adjacent to the just-completed wave.
As has been noted in the literature, this is not the onlyway to
tile this set of iterations; however, other tilings arenot
(currently) selected by fully-automatic loop parallelizerssuch as
PLuTo [19]. Even the semi-automatic AlphaZ sys-tem [40], which is
designed to allow programmers to exper-iment with different
optimization strategies, cannot expressmany of these tilings. If
such tools are to be consideredfor extreme scale computing, we must
consider whether ornot the tiling strategies they support provide
the necessaryscaling characteristics.
3.1 ScalabilityTo support our claim that this pipelined tiling
does not al-ways provide scalable parallelism, we need only show
that itfails to scale on one of the classic examples for which it
hasshown dramatic success for low-degree parallelism, such asthe
easily-visualized one-dimensional Jacobi stencil of Fig-
t
i
12
12
12
12
12
12
12
12
11
10
9
8
7
6
5
4
3
2
1
11
11
2
3
4
4
5
5
5
6
6
6
7
7
7
7
8
8
8
8
9
9
9
9
9
10
10
10
10
10
108
11
11
11
11
11
Figure 5: Wavefronts of Pipelined Tile Execution.
ure 3. We will first do so, and then discuss the issue inhigher
dimensions.
For some problem sizes, the tiling of Figure 4 can come closeto
realizing scalable parallelism: if P = N
σ+τand T
τis much
larger than P , most of the execution is done with P
pro-cessors. Figure 5 illustrates the first 8τ time steps of suchan
example, with P = 8, σ = 2τ , and N = P (σ + τ) (theellipsis on the
right indicates a large number of additionaltime steps). The tiles
executed in the first 12 waves arenumbered 1 to 12 for reference,
and individual iterationsand data-flow are omitted for clarity. For
all iterations af-ter 11, this tiling provides enough parallelism
to keep eightprocessors busy for this problem size, and for large T
therunning time approaches 1
8of the sequential execution time
(plus communication/synchronization time, which we willdiscuss
later). If we double both N and P , a similar ar-gument shows the
running time approaches 1
16of the now
twice-as-large sequential execution time, i.e., the same
par-allel execution time, as described by Gustafson.
However, as N and P continue to grow, the assumptionthat T
τ� P eventually fails, and scalability is lost. Con-
sider what happens in Figure 5 if T = 8τ , i.e., the
ellipsiscorresponds to 0 additional time steps. At this point,
dou-bling N and P produces a figure that is twice as tall, but
nowider; parallelism is limited to degree 8, and execution with16
processors requires 35 steps rather than the 23 needed forFigure 5
when T = 8τ (note that the upper-right region issymmetric with the
lower-left). Thus, communication-freeexecution time has increased
rather than remaining con-stant. Increasing T (rather than N) with
P is no better,and in fact no combination of N and T increase can
allow16 processors to execute twice the work of 8 in the same
23wavefronts: adding even one full row or one full column oftiles
means 24 wavefronts are needed.
Figure 5 was, of course, constructed to illustrate a lack
ofscalability. But even if we start with a more realistic
problem
5
-
size, i.e., with N � P and T � P , the pipelined tiling
stilllimits scalability. Consider what happens we apply the
tilingof Figure 5 with parameters N = 10000σ, T = 1000τ, P =100, in
which over 99% of the tiles can be run with full100-fold
parallelism, and then scale up N and P togetherby successive
factors of ten. Our first jump in size givesN = 100000σ, T = 1000τ,
P = 1000, which still has full(1,000-fold) parallelism in over 98%
of the tiles.
After the next jump, to N = 1000000σ, T = 1000τ, P =10000 there
is no 10,000-fold concurrency in the problem.Even if the
application programmer is willing to scale upT rather than just N ,
in an attempt to reach full machineutilization, the execution for N
= 38730σ, T = 25820τ, P =10000 still achieves 10,000-fold
parallelism in only 85% of the109 tiles. No combination of N and T
allows any 100,000-fold parallelism on 1010 tiles with this
tiling... to maintaina given degree of parallelism asymptotically,
we must scaleboth N and T with P , contrary to Gustafson’s original
def-inition. While this may be acceptable for some
applicationdomains, we do not presume it to be universally
appropri-ate, and thus see pipelined tiling as a potential
restrictionon the applicability of time tiling.
It is not always realistic to scale the number of time steps T
.Bassetti et al. [4] introduce an optimization they call
slidingblock temporal tiling. They indicate that in these
relax-ation algorithms such as Jacobi “[g]enerally several
sweepsare made”. In their experiments they use up to 8 sweeps.Zhou
et al. [41] use 16,384 in their modified benchmarks. Ex-periments
with the Pochoir compiler [34] used 200 time stepsbecause their
cache oblivious performance optimization im-proves temporal
locality. In summary, the number of timeiterations in stencil
computation performance optimizationresearch varies dramatically.
Work from the BeBOP groupat Berkeley [8] discusses how often
multiple sweeps over thegrid within one loop occur and indicate
that it may not beas common as those of us working on time skewing
imagine.This makes it even more important for tiling strategies
toprovide scalable parallelism that does not require the num-ber of
time steps to be on par with the spatial domain.
3.2 Tile Size Choice and Communication CostThe above argument
presumes a fixed tile size, ignoring thepossibility of reducing the
tile size to increase the number oftiles. However, communication
costs (either among proces-sors or between processors and RAM)
dictate a minimal tilesize below which performance will be
negatively impacted(see [38, 19] for further discussion).
Note that per-processor communication cost is not likely
toshrink as the data set size and number of processors is scaledup:
Each processor will need to send the same number oftiles per
iteration, producing per-processor communicationcost that remains
roughly constant (e.g., if processors areconnected to nearest
neighbors via a network of the samedimensionality as the data set
space) or rising (e.g., if pro-cessors are connected via a shared
bus).
Even if we ignore communication costs entirely (i.e. in
thenotoriously unscalable PRAM abstraction), tile size cannotshrink
below a single-iteration (or single-instruction) tile,and
eventually our argument of Section 3.1 comes into play
in asymptotic analysis.
3.3 Other Factors Influencing Scalability andPerformance
Our argument focuses on tile shape, but a number ofother factors
will influence the degree of parallelism actu-ally achieved by a
given tiling. As noted above, reductionsin tile size could, up to a
point, provide additional paral-lelism (possibly at the cost of
performance on the individualnodes).
The use of global barriers or synchronization is commonin the
original code generators, but note that MPI codegenerators are
under development for both Pluto and Al-phaZ. While combining
different tilings and code generationschemes raises practical
challenges in implementation, we donot see any reason why any of
the tilings discussed in thenext section could not, in principle,
be executed withoutglobal barriers within the tiled iteration
space.
High performance on each node also requires attention to anumber
of other code generation issues, such as code com-plexity and
impact on vectorization and prefetching. Fur-thermore, these issues
could be exacerbated by changes intile shape [3, Section III.B].
Thus, different tiling shapes maybe optimal for different hardware
platforms or even differ-ent problem sizes, depending on the
relative costs of limit-ing parallelism vs. per-node performance.
Both [3, SectionIII.B] and [33] discuss these issues and the
possibility ofchoosing a tiling that is scalable in some, but not
all, datadimensions.
3.4 Higher-Dimensional CodesWhile the two-dimensional iteration
space of the three-pointJacobi stencil is easy to visualize on
paper, many of thesubtleties of tiling techniques are only evident
in problemswith at least two dimensions of data and one of time.
Forpipelined tiling, the conflict between scalability is
essentiallythe same in higher dimensions: for a pipelined tiling of
ahyper-rectangular iteration space of dimension d, eventuallythe
amount of work must grow by O(kd) to achieve paral-lelism
O(kd−1).
Conversely, in higher dimensions, the existence of a wave-front
that is perpendicular to the time dimension (or anyother face of a
hyper-rectangular iteration space) is fre-quently the sign of a
parallelization that admits some formof weak scalability. However,
as we will see, the parallelismof some tilings scales with only
some of the spatial dimen-sions.
4. VARIATIONS ON THE TILING THEMEThe published literature
describes many approaches to looptiling. In this section, we survey
these approaches, group-ing together those that produce similar (or
identical) tilings.Our descriptions focus primarily on the tiling
that would beused for the code of Figure 3, which is used as an
intro-ductory example in many of the descriptions. We illustratethe
tilings of this code with figures that are analogous toour Figure
5, with gray shading highlighting a single tile
6
-
t
i
21 3
1
1
1
2
2
2
3
3
3
Figure 6: Overlapped Tiling.
from time step two. We delve into the complexities of
morecomplex codes only as necessary to make our point.
For iterative codes with intra-time-step data-flow, thetile
shapes discussed below are not legal (or cannot belegally executed
in an order that permits scalable paral-lelism). For example,
consider an in-place update of asingle copy of a data set, e.g. the
single statement A[i]= (A[i-1]+2*A[i]+A[i+1])/4 nested inside t and
i loops.Since each tile must wait for data from tiles of with
lowervalues of i and the same value of t, pipelined startup
isnecessary. While such code provides additional
asymptoticconcurrency when both T and N increase, we see no way
toallow concurrency to grow linearly with the total work to bedone
in parallel. Thus, pipelined tiling does not produce ascalability
disadvantage for such codes.
Note that our discussion below focuses on distinct tileshapes,
rather than distinctions among algorithms used todeduce tile shape
or size or the manner in which individualtiles are scheduled or
assigned to processors. For example wedo not specifically discuss
the “CORALS” approach [32], inwhich an iteration space is
recursively subdivided into paral-lelograms, avoiding the need to
choose a tile size in advanceof starting the computation.
Regardless of size, variationin size, and algorithmic provenance,
the information flowamong atomic parallelogram tiles still forces
execution toproceed along the diagonal wavefront, and thus still
limitsasymptotic scalability.
4.1 Overlapped TilingA number of projects have experimented with
what is com-monly called overlapped tiling [26, 4, 2, 25, 10, 24,
19, 7,20, 41]. In overlapped tiling for stencil computations,
alarger halo is maintained so that each processor can execute
t
i2
2
3
31
1
4
4
5
6
5
6
Figure 7: Trapezoidal Tiling.
more than one time step before needing to communicatewith other
processors. Figure 6 illustrates this tiling. Twoindividual tiles
from the second wavefront have been indi-cated with shading, one
with gray and one with polkadots;the triangular polkadotted and
gray region is in both tiles,and thus represents redundant
computation. This overlapmeans that all tiles along each vertical
wavefront can be exe-cuted in parallel while still improving
temporal data locality.
In terms of parallelism scalability, overlapped tiling doesscale
because all of the tiles can be executed in parallel. If
atwo-dimensional tiling in a two-dimensional spatial part of
astencil is used as the seed partition, then two dimensions
ofparallelism will be available with no need to fill a
pipeline.This means that as the data scale, so will the
parallelism.
The problem with overlapped tiling is that redundant
com-putation is performed. This leads to a trade-off
betweenparallel scalability and execution time. Tile size
selectionmust also consider the effect of the expanded memory
foot-print caused by overlapped tiling.
Auto-tuning between overlapped sparse tiling and non-overlapped
sparse tiling [29, 30] for irregular iteration spaceshas also been
investigated by Demmel et al. [9] in the con-text of iterative
sparse matrix computations where the tilingis a run-time reordering
transformation [28].
4.2 Trapezoidal TilingFrigo and Strumpen [12, 13, 14] propose an
algorithm forlimiting the asymptotic cache miss rate of “an
idealized par-allel machine” while providing scalable parallelism.
Figure 7illustrates that even a simplified version of their
approach
7
-
t
i
21
1
1
1
2
2
2
1
3
3
3
3
3
Figure 8: One data dimension and the time dimen-sion in a
diamond tiling [33]. The diamond extendsinto a diamond tube in the
second data dimension.
can enable weak scaling for the examples we discuss here(their
full algorithm involves a variety of possible decompo-sition steps;
our figure is based on Figure 4 of [14]). In ourFigure 7, the
collection of trapezoids marked “1” can startsimultaneously; after
these tiles complete, the mirror-imagetrapezoids that fill the
spaces between them, marked “2”,can all be executed; after these
steps, a similar pair of setsof tiles “3” and “4” complete another
τ time steps of com-putation, etc. For discussion of the actual
transformationused by Frigo and Strumpen, and its asymptotic
behavior,see [14].
The limitation of this approach is not its scalability,
butrather the challenge of implementing it in a
general-purposecompiler. Tang et al. [34] have developed the
Pochoir com-piler, based on a variant of Frigo and Strumpen’s
techniqueswith a higher degree of asymptotic concurrency [34].
How-ever, Pochoir handles a specialized language that allows
onlystencil computations. Tools like PLuTo handle a larger do-main
of dense array codes; it may be possible to generalizetrapezoidal
tiling to PLuTo’s domain, but we know of nosuch work.
4.3 Diamond TilingStrzodka et al. [33, 31] present the CATS
algorithm for cre-ating diamond “tube” tiles in a 3-d iteration
space. The dia-monds occur in the time dimension and one data
dimension,as in Figure 8. The tube aspect occurs because there is
notiling in the other space dimension. Each diamond tube canbe
executed in parallel with all other diamond tubes withina temporal
row of diamond tubes. For example, in Figure 8all diamonds labeled
“1” can be executed in parallel, afterwhich all diamonds labeled
“2” can be executed in parallel,
t
i
S
C
R1
1
1
S
C1
1
C
R1
1
S
C
R2
2
2
S
C2
2
C
R2
2
S
C
R3
3
3
S
C3
3
C
R3
3
Figure 9: Molecular tiling.
etc. Within each diamond tube, the CATS approach sched-ules
another level of wavefront parallelism at the granularityof
iteration points.
Although Strzodka et al. [33] do not use diamond tiles for
1-ddata/2-d iteration space, diamond tiles are parallel
scalablewithin that context. They actually focus on the 2-d
data/3-d iteration space, where asymptotically, diamond tiling
onlyscales for one data dimension. The outermost level of
par-allelism over diamond tubes only scales with one dimensionof
data since the diamond tiling occurs across time and onedata
dimension. On page 2 of [33], Strzodka et al. explic-itly state
that their results are somewhat surprising in thatasymptotically
their behavior should not be as good as previ-ously presented
tiling approaches, but the performance theyobserve is excellent
probably due to the concurrent parallelstartup that the diamond
tiles provide.
Diamond tiling is a practical approach that can perform bet-ter
than pipelined tiling approaches because it avoids thepipeline fill
and drain issue. The diamond tube also hasadvantages in terms of
intra-tile performance: fine-grainedwavefront parallelism and
leveraging pre-fetchers. The dis-advantages of the diamond tiling
approach are that it hasnot been expressed within a framework such
as the poly-hedral model (although it would be possible, just not
withrectangular tiles); that the approach does not cleanly extendto
higher dimensions of data (only one dimension of diamondtiles are
possible with other dimensions doing some form ofpipelined or split
tiling); and that the outermost level ofparallelism can only scale
with one data dimension.
4.4 Molecular TilingWonnacott [38] described a tiling for
stencils that allows trueweak scaling for higher-dimensional
stencils, performs no re-
8
-
dundant work, and contains tiles that are all the same
shape.However, Wonnacott’s molecular tiles required mid-tile
com-munication steps, as per Pugh and Rosser’s iteration
spaceslicing [21] as illustrated in Figure 9. Each tile first
executesits send slice (labeled “S”), the set of iterations that
producevalues that will be needed by another
currently-executingtile, and then sends those values; it then goes
on to executeits compute slice (“C”), the set of iterations that
require noinformation from any other currently-executing tile;
finally,each tile receives incoming values and executes its
receiveslice (“R”), the set of iterations that require these data.
Inhigher dimensions, Wonnacott discussed the possibility
ofextending the parallelograms into prisms (as diamonds areextended
into diamond tubes in the diamond tiling), butalso presented a
multi-stage sequence of send and receiveslices to provide full
scalability.
Once again, a transformation with potential for true weakscaling
remains unrealized due to implementation chal-lenges. No
implementation was ever released for iterationspace slicing [21].
For the restricted case of stencil com-putations, these molecular
tiles can be described withoutreference to iteration space slicing,
but they make extensiveuse of modulo constraints supported by the
Omega Library’scode generation algorithms [18], and Omega has no
direct fa-cility for generating the required communication
primitives.
The developers of PLuTo explored a similar split tiling
[19]approach, and demonstrated improved performance over
thepipelined tiling, but this approach was not used for the
re-leased implementation of PLuTo.
4.5 A New HopeRecent work on the PLuTo system [3] has produced a
tilingthat we believe will address the issue of true scalability
withdata set size, though the authors frame their approach
pri-marily in terms of“enabling concurrent start-up”rather
thanimproving asymptotic scalability. For a one-dimensionaldata
set, this approach is essentially the same as the “dia-mond tiling”
of Section 4.3, but for higher-dimensional sten-cils it allows
scalable parallelism in all data dimensions.
Although a Jacobi stencil on a two-dimensional data set
hasan“obvious” four-sided pyramid of dependences, a collectionof
four-sided pyramids (or a collection of octahedrons madefrom pairs
of such pyramids) cannot cover all points, andthus does not make a
regular tiling. The algorithm of [3]produces, instead, a collection
of six-faced tiles that appearto be balanced on one corner (these
figures are shown withthe time dimension moving up the page).
Various sculpturesof balanced cubes may be helpful in visualizing
this tiling;those with limited travel budgets may want to search
theinternet for images of the “Zabeel park cube sculpture”.
Theapproach of [3] manages to construct these corner-balancedsolids
in such as way that the three faces at the bottom ofthe tile
enclose the data-flow.
Experiments with this approach [3] demonstrate improvedresults
(vs. pipelined tiling) for current shared-memory sys-tems up to 16
cores. The practicality of this approach onsuch a low degree of
parallelism suggests that the per-nodepenalties discussed in our
Section 3.3 are not prohibitivelyexpensive.
While the algorithm is described in terms of stencils, andthe
authors only claim concurrent startup for stencils, it
isimplemented in a general automatic parallelizer (PLuTo).We belive
it would be interesting to explore the full domainover which this
tiling algorithm provides concurrent startup.
The authors of [3] do not discuss asymptotic complexity, butwe
hope that future collaborations could lead to a detailedtheoretical
and larger-scale empirical study of the scalabilityof this
technique, using the distributed tile execution tech-niques of [1]
or [5].
4.6 A Note on Implementation ChallengesThe pipelined tile
execution shown in Figures 4 and 5 is of-ten chosen for ease of
implementation in compilers based onthe polyhedral model. Such
compilers typically combine alliterations of all statements into
one large iteration space; thepipelined tiling can then be seen as
a simple linear transfor-mation of this space, followed by a tiling
with rectangularsolids. This approach works well regardless of
choice of soft-ware infrastructure within the polyhedral model.
The other transformations may be more sensitive to choiceof
software infrastructure, or the subtle use thereof. At thistime, we
do not have an exact list of which transformationscan be expressed
with which transformation and code gen-eration libraries. We are
working with tools that allow thedirect control of polyhedral
transformations from a text in-put, such as AlphaZ [40] and the
Omega Calculator [17],in hopes of better understanding the
expressiveness of thesetools and the polyhedral libraries that
underlie them.
5. CONCLUSIONSCurrent work on general-purpose loop tiling
exhibits a di-chotomy between largely unimplemented explorations
ofasymptotically high degrees of parallelism and carefullytuned
implementations that restrict or inhibit scalable paral-lelism.
This appears to result from the challenge of generalimplementation
of scalable approaches. The pipelined ap-proach requires only a
linear transformation of the iterationspace followed by rectangular
tiling, but does not providetrue scalable parallelism. Diamond
tiling scales with onlyone data dimension. Overlapped, trapezoidal,
and molec-ular tiling each pose implementation challenges (due to
re-dundant work, non-uniform tile shape/orientation, or non-atomic
tiles, respectively).
We believe automatic parallelization for extreme scale
com-puting will require a tuned implementation of a general
tech-nique that does not inhibit or restrict scalability; thus
fu-ture work in this area must address scalability, generality,and
quality of implementation. We are optimistic that on-going work by
Bondhugula et al. [3] may already provide ananswer to this to
dilemma.
6. ACKNOWLEDGMENTSThis work was supported by NSF Grant
CCF-0943455, by aDepartment of Energy Early Career Grant
DE-SC0003956,and the CACHE Institute grant DE-SC04030.
9
-
7. REFERENCES[1] Abdalkader, M., Burnette, I., Douglas, T.,
and
Wonnacott, D. G. Distributed shared memory andcompiler-induced
scalable locality for scalable clusterperformance. Cluster
Computing and the Grid, IEEEInternational Symposium on 0 (2012),
688–689.
[2] Allen, G., Dramlitsch, T., Foster, I., Goodale,T., Karonis,
N., Ripeanu, M., Seidel, E., andToonen, B. The cactus code: A
problem solvingenvironment for the grid. In Proceedings of the
NinthIEEE International Symposium on High PerformanceDistributed
Computing (HPDC9) (Pittsburg, PA,USA, 2000).
[3] Bandishti, V., Pananilath, I., and Bondhugula,U. Tiling
stencil computations to maximizeparallelism. In Proceedings of 2012
InternationalConference for High Performance Computing,Networking,
Storage and Analysis (November 2012),SC ’12, ACM Press.
[4] Bassetti, F., Davis, K., and Quinlan, D.Optimizing
transformations of stencil operations forparallel object-oriented
scientific frameworks oncache-based architectures. Lecture Notes in
ComputerScience 1505 (1998).
[5] Bondhugula, U. Compiling affine loop nests
fordistributed-memory parallel architectures. Preprint,2012.
[6] Bondhugula, U., Hartono, A., and Ramanujam,J. A practical
automatic polyhedral parallelizer andlocality optimizer. In In PLDI
âĂŹ08: Proceedings ofthe ACM SIGPLAN 2008 conference on
Programminglanguage design and implementation (2008).
[7] Christen, M., Schenk, O., Neufeld, E.,Paulides, M., and
Burkhart, H. Manycore StencilComputations in Hyperthermia
Applications. InScientific Computing with Multicore and
Accelerators,J. Dongarra, D. Bader, and J. Kurzak, Eds. CRCPress,
2010, pp. 255–277.
[8] Datta, K., Kamil, S., Williams, S., Oliker, L.,Shalf, J.,
and Yelick, K. Optimizations andperformance modeling of stencil
computations onmodern microprocessors. SIAM Review 51, 1
(2009),129–159.
[9] Demmel, J., Hoemmen, M., Mohiyuddin, M., andYelick, K.
Avoiding communication in sparse matrixcomputations. In Proceedings
of International Paralleland Distributed Processing Symposium
(IPDPS) (LosAlamitos, CA, USA, 2008), IEEE Computer Society.
[10] Ding, C., and He, Y. A ghost cell expansion methodfor
reducing communications in solving pde problems.In Proceedings of
the ACM/IEEE Conference onSupercomputing (New York, NY, USA,
2001),Supercomputing ’01, ACM, pp. 50–50.
[11] Feautrier, P. Dataflow analysis of scalar and
arrayreferences. International Journal of ParallelProgramming 20, 1
(Feb. 1991), 23–53.
[12] Frigo, M., and Strumpen, V. Cache obliviousstencil
computations. In Proceedings of the 19th annualinternational
conference on Supercomputing (NewYork, NY, USA, 2005), ICS ’05,
ACM, pp. 361–366.
[13] Frigo, M., and Strumpen, V. The cache complexityof
multithreaded cache oblivious algorithms. In
Proceedings of the eighteenth annual ACM symposiumon Parallelism
in algorithms and architectures (NewYork, NY, USA, 2006), SPAA ’06,
ACM, pp. 271–280.
[14] Frigo, M., and Strumpen, V. The cache complexityof
multithreaded cache oblivious algorithms. Theor.Comp. Sys. 45, 2
(June 2009), 203–233.
[15] Gustfson, J. L. Reevaluating Amdahl’s law.Communications of
the ACM 31, 5 (May 1988),532–533.
[16] Irigoin, F., and Triolet, R. Supernodepartitioning. In
Conference Record of the FifteenthACM Symposium on Principles of
ProgrammingLanguages (1988), pp. 319–329.
[17] Kelly, W., Maslov, V., Pugh, W., Rosser, E.,Shpeisman, T.,
and Wonnacott, D. The OmegaCalculator and Library. Tech. rep.,
Dept. of ComputerScience, University of Maryland, College Park,
Apr.1996.
[18] Kelly, W., Pugh, W., and Rosser, E. Codegeneration for
multiple mappings. In The 5thSymposium on the Frontiers of
Massively ParallelComputation (McLean, Virginia, Feb. 1995),pp.
332–341.
[19] Krishnamoorthy, S., Baskaran, M.,Bondhugula, U., Ramanujam,
J., Rountev, A.,and Sadayappan, P. Effective
automaticparallelization of stencil computations. In Proceedingsof
Programming Languages Design andImplementation (PLDI) (New York,
NY, USA, 2007),vol. 42, ACM, pp. 235–244.
[20] Nguyen, A., Satish, N., Chhugani, J., Kim, C.,and Dubey, P.
3.5-d blocking optimization for stencilcomputations on modern cpus
and gpus. InProceedings of the ACM/IEEE InternationalConference for
High Performance Computing,Networking, Storage and Analysis
(Washington, DC,USA, 2010), SC ’10, IEEE Computer Society,pp.
1–13.
[21] Pugh, W., and Rosser, E. Iteration slicing forlocality. In
12th International Workshop on Languagesand Compilers for Parallel
Computing (Aug. 1999).
[22] Pugh, W., and Wonnacott, D. Eliminating falsedata
dependences using the Omega test. In SIGPLANConference on
Programming Language Design andImplementation (San Francisco,
California, June1992), pp. 140–151.
[23] Pugh, W., and Wonnacott, D. Constraint-basedarray
dependence analysis. ACM Trans. onProgramming Languages and Systems
20, 3 (May1998), 635–678.
[24] Rastello, F., and Dauxois, T. Efficient tiling foran ode
discrete integration program: Redundant tasksinstead of trapezoidal
shaped-tiles. In Proceedings ofthe 16th International Parallel and
DistributedProcessing Symposium (Washington, DC, USA, 2002),IPDPS
’02, IEEE Computer Society, pp. 138–.
[25] Ripeanu, M., Iamnitchi, A., and Foster, I. T.Cactus
application: Performance predictions in gridenvironments. In
Proceedings of the 7th InternationalEuro-Par Conference Manchester
on ParallelProcessing (London, UK, UK, 2001), Euro-Par
’01,Springer-Verlag, pp. 807–816.
10
-
[26] Sawdey, A., and O’Keefe, M. T. Program analysisof overlap
area usage in self-similar parallel programs.In Proceedings of the
10th International Workshop onLanguages and Compilers for Parallel
Computing(London, UK, UK, 1998), LCPC ’97, Springer-Verlag,pp.
79–93.
[27] Song, Y., and Li, Z. New tiling techniques toimprove cache
temporal locality. ACM SIGPLANNotices (PLDI) 34, 5 (May 1999),
215–228.
[28] Strout, M. M., Carter, L., and Ferrante, J.Compile-time
composition of run-time data anditeration reorderings. In
Proceedings of the ACMSIGPLAN Conference on Programming
LanguageDesign and Implementation (PLDI) (New York, NY,USA, June
2003), ACM.
[29] Strout, M. M., Carter, L., Ferrante, J.,Freeman, J., and
Kreaseck, B. Combiningperformance aspects of irregular Gauss-Seidel
viasparse tiling. In Proceedings of the 15th Workshop onLanguages
and Compilers for Parallel Computing(LCPC) (Berlin / Heidelberg,
July 2002), Springer.
[30] Strout, M. M., Carter, L., Ferrante, J., andKreaseck, B.
Sparse tiling for stationary iterativemethods. International
Journal of High PerformanceComputing Applications 18, 1 (February
2004),95–114.
[31] Strzodka, R., Shaheen, M., and Pajak, D. Timeskewing made
simple. In PPOPP (2011), C. Cascavaland P.-C. Yew, Eds., ACM, pp.
295–296.
[32] Strzodka, R., Shaheen, M., Pajak, D., andSeidel, H.-P.
Cache oblivious parallelograms initerative stencil computations. In
ICS ’10: Proceedingsof the 24th ACM International Conference
onSupercomputing (June 2010), ACM, pp. 49–59.
[33] Strzodka, R., Shaheen, M., Pajak, D., andSeidel, H.-P.
Cache accurate time skewing initerative stencil computations. In
Proceedings of the40th International Conference on Parallel
Processing(ICPP) (Taipei, Taiwan, September 2011), IEEEComputer
Society, pp. 517–581.
[34] Tang, Y., Chowdhury, R. A., Kuszmaul, B. C.,Luk, C.-K., and
Leiserson, C. E. The pochoirstencil compiler. In Proceedings of the
23rd ACMsymposium on Parallelism in algorithms andarchitectures
(New York, NY, USA, 2011), SPAA ’11,ACM, pp. 117–128.
[35] Van der Wijngaart, R. F., Sarukkai, S. R.,Mehra, and P. The
effect of interrupts on softwarepipeline execution on
message-passing architectures.In FCRC ’96: Conference proceedings
of the 1996International Conference on Supercomputing:Philadelphia,
Pennsylvania, USA, May 25–28, 1996(New York, NY 10036, USA, 1996),
ACM, Ed., ACMPress, pp. 189–196.
[36] Wolf, M. E., and Lam, M. S. A data localityoptimizing
algorithm. In Programming LanguageDesign and Implementation (New
York, NY, USA,1991), ACM.
[37] Wolfe, M. J. More iteration space tiling. InProceedings,
Supercomputing ’89, Reno, Nevada(Reno, Nevada, November 1989), ACM,
Ed., ACMPress, pp. 655–664.
[38] Wonnacott, D. Using Time Skewing to eliminateidle time due
to memory bandwidth and networklimitations. In International
Parallel and DistributedProcessing Symposium (May 2000), IEEE.
[39] Wonnacott, D. Achieving scalable locality withTime Skewing.
Internation Journal of ParallelProgramming 30, 3 (June 2002),
181–221.
[40] Yuki, T., Basupalli, V., Gupta, G., Iooss, G.,Kim, D.,
Pathan, T., Srinivasa, P., Zou, Y., andRajopadhye, S. Alphaz: A
system for analysis,transformation, and code generation in the
polyhedralequational model. Tech. rep., Technical ReportCS-12-101,
Colorado State University, 2012.
[41] Zhou, X., Giacalone, J.-P., Garzarán, M. J.,Kuhn, R. H.,
Ni, Y., and Padua, D. Hierarchicaloverlapped tiling. In Proceedings
of the TenthInternational Symposium on Code Generation
andOptimization (New York, NY, USA, 2012), CGO ’12,ACM, pp.
207–218.
11
-
12
-
Memory Allocations forTiled Uniform Dependence Programs ∗
Tomofumi YukiColorado State University
Fort CollinsColorado, U.S.A.
[email protected]
Sanjay RajopadhyeColorado State University
Fort CollinsColorado, U.S.A.
[email protected]
ABSTRACTIn this paper, we develop a series of extensions to
schedule-independent storage mapping using Quasi-Universal
Occu-pancy Vectors (QUOVs) targeting tiled execution of poly-hedral
programs. By quasi-universality, we mean that werestrict the
“universe” of the schedule to those that corre-spond to tiling.
This provides the following benefits: (i)the shortest QUOVs may be
shorter than the fully univer-sal ones, (ii) the shortest QUOVs can
be found without anysearch, and (iii) multi-statement programs can
be handled.The resulting storage mapping is valid for tiled
execution byany tile size.
1. INTRODUCTIONIn this paper, we discuss storage mappings for
tiled pro-
grams, especially for the case when tile sizes are not knownat
compile time. When the tile sizes are parameterized,most techniques
for storage mappings [6, 13, 15, 20] cannotbe used due to the
non-affine nature of parameterized tiling.However, we cannot
combine parametric tiling with memoryre-allocation if we cannot
find a legal allocation for all legaltile sizes.
One approach that can find storage mappings for paramet-rically
tiled programs is the Schedule-Independent StorageMapping proposed
by Strout et al. [19]. For programs withuniform dependences,
schedule-independent memory allo-cation finds storage mappings that
are valid for any legalexecution of the program, including tiling
by any tile size.We present a series of extensions to
schedule-independentmapping for finding legal and compact storage
mappings forpolyhedral programs with uniform dependences.
Schedule-Independent Storage Mapping is based on whatare called
Universal Occupancy Vectors (UOVs), that char-acterize when a value
produced can safely be overwritten.As originally defined by Strout
et al, UOVs are fully uni-versal, where the resulting allocations
are valid for any legalschedule. In this paper, we restrict the
UOVs to smalleruniverses and exploit their properties to
efficiently find goodUOVs. In the remainder of this paper, we call
such UOVsthat are not fully universal Quasi-UOVs (QUOVs) to
distin-guish them from fully universal ones. Using QUOVs, we
canfind valid mappings for tiled execution by any tile size, butnot
necessarily valid for other legal schedules. This leads tomore
compact storage mappings for cases when fully univer-sal allocation
is an overkill.
∗This work was funded in part by the National Science
Foun-dation, Award Numbers: 1240991 and 0917319
The restriction on the universality leads to the following:
• QUOVs may be shorter than the shortest UOV. Sincethe universe
of possible schedules is restricted, validstorage mappings may be
more compact. We use Man-hattan distance as the length of UOVs as a
cost mea-sure when we describe optimality of a projective mem-ory
allocation.
• The shortest QUOV for tiled loop programs can be an-alytically
found, and the dynamic programming algo-rithm presented by Strout
et al. is no longer necessary.
• Imperfectly nested loops can be handled. The origi-nal method
assumed single statement programs (andhence perfectly nested loop
programs.) We extend themethod by taking statement orderings, often
expressedin the polyhedral model as constant dimensions,
intoaccount. This is possible because we focus on tiled ex-ecution,
where tiling applies the same schedule (exceptfor ordering
dimensions) to all statements.
The input to our analysis is a program in
polyhedralrepresentation, which can be obtained from loop
programsthrough array data-flow analysis [7, 14]. Our methods canbe
used for loop programs in single assignment form; analternative
view used in some of the prior work [19, 20].
In addition, we present a method for isolating boundarycases
based on index-set splitting [9]. UOV-based allocationassumes that
every a dependence is active at all points inthe iteration space.
In practice, programs have boundarycases where certain dependences
are only valid at iterationspace boundaries. We take advantage of
the properties ofQUOVs we develop to guide the splitting.
2. BACKGROUNDIn this section, we present the background
necessary
for this paper. We first introduce the terminology used,and then
present an overview of Universal Occupancy Vec-tors [19].
2.1 Polyhedral RepresentationsPolyhedral representations of
programs primarily consist
of statement domains and dependences. Statement domainsrepresent
the set of iteration points where a statement isexecuted. In
polyhedral programs, such sets are describedby a finite union of
polyhedra.
In this paper, we focus on programs with uniform depen-dences,
where the producer and the consumer differ by aconstant shift. We
characterize these dependences using a
13
-
vector, which we call data-flow vector, drawn the producerto the
consumer. For example, if a value produced by aniteration [i, j] is
used by another iteration [i+ 1, j + 2], thecorresponding data-flow
vector is [1, 2].
2.2 Schedules and Storage MappingsThe schedules are represented
by affine mappings that
map statement domains to a common dimensional space,where the
lexicographic order denotes the order of execu-tion. In the
polyhedral literature, statement orderings arecommonly expressed as
constant dimensions in the schedule.Furthermore, one can represent
arbitrary orderings of loopsand statements by adding d + 1
additional dimensions [8],where d is the dimensionality of
statement domains in theprograms1. To make the presentation
consistent, we assumesuch schedules are always used, resulting in a
2d+ 1 dimen-sional schedule.
The storage mappings are often represented as a combi-nation of
affine mappings and dimension-wise modulo fac-tors [13, 16,
19].
2.3 TilingTiling is a well known loop transformation that was
orig-
inally proposed as a locality optimization [12, 17, 18, 22].
Itcan also be used to extract coarser grained parallelism,
bypartitioning the iteration space to tiles (blocks) of
compu-tation, some of which may run in parallel [12, 17].
Legality of tiling is a well established concept defined
overcontiguous subsets of the schedule dimensions (in the rangeof
the scheduling function; scheduled space), also calledbands [3].
These dimensions of the schedules are tilable,and are also known to
be fully permutable [12].
The range space of the schedules given to statements ina program
all refers to the common space, and thus havethe same number of
dimensions. Among these dimensions,a dimension is tilable if all
dependences are not violated(i.e., the producer is not scheduled
after the consumer, butpossibly be scheduled to the same time
stamp,) with a one-dimensional schedule using only the dimension in
question.Then any contiguous subset of such dimensions forms a
legaltilable band.
We call a subset of dimensions in an iteration space tobe
tilable, if the identity schedule is tilable for the corre-sponding
subset. The iteration space is fully-tilable if alldimensions are
tilable.
2.4 Universal Occupancy VectorsA Universal Occupancy Vector
(UOV) [19] is a vector that
denotes the “distance after which” when a value may safelybe
overwritten in the following sense. When an iterationz is executed,
its value is stored in some memory location.Another iteration z′
can reuse this same memory locationif all iterations that use the
value produced by z have beenexecuted. When a storage mapping is
such that z and z′
are mapped to the same memory location, the difference ofthese
points, z′ − z, is called the occupancy vector.
Universal Occupancy Vector is a specialization of such vec-tors,
where all iterations k that use z are guaranteed to beexecuted
before z′ in any legal schedule. Since most machinemodels assume
that, within a single assignment statement,
1Note that for uniform dependence programs, all statementdomains
have the same number of dimensions.
reads happen before writes in a given time step, z′ may alsouse
the value produced by z.
Additionally, we introduce a notion of scoping to UOVs.We call a
vector v to be an UOV with respect to a set of de-pendences I, if
the vector v satisfies the necessary propertyto be an UOV for a
subset of all points k that use the valueproduced by z with one of
the dependences in I.
Once the UOV is computed, the mapping that corre-sponds to the
projection of the statement domain along theUOV is a legal storage
mapping. If the UOV crosses morethan one integer points, then an
array that corresponds toa single projection is not sufficient.
Instead, multiple ar-rays are used in turn, implemented using
modulo factors.The necessary modulo factor is the GCD of elements
of theUOV.
The trivial UOV; a valid, but possibly suboptimal UOVis computed
as follows.
1. Construct the set of data-flow vectors corresponding toall
the dependences that use the result of a statement.
2. Compute the sum of all data-flow vectors in the con-structed
set.
The above follows from a simple proposition shown below,and an
observation that the data-flow vector of a dependenceis a legal UOV
with respect to that dependence.
Proposition 1 (Sum of UOVs). Let u and v be, re-spectively, the
UOVs for two sets of dependences U and V.Then u+ v is a legal UOV
for U ∪ V.
Proof. The value produced at z is dead when z + u canlegally be
executed with respect to the dependences in U ,and similarly for V
at z + v. Since there is a path from z toz + u + v by following the
edges z + u and z + v (in eitherorder), the value produced at z is
guaranteed to be used byall uses, z + u and z + v, when z + u + v
can legally beexecuted.
The optimality of UOVs without any knowledge of sizeor shape of
the iteration space is captured by the length ofthe UOV. However,
the length that should be compared isnot the Euclidean length, but
the Manhattan distance. Wediscuss the optimality of UOV-based
allocations and otherprojective allocations in Section 7.
3. OVERVIEW OF OUR APPROACHUOV-based allocation give legal
mappings even for sched-
ules that cannot be implemented as loops. For example,even a
run-time work stealing scheduler can use UOV-basedallocation.
However, this is obviously an overkill if we onlyconsider schedules
that can be implemented as loops.
The important change in perspective is that we are notinterested
in schedule-independent storage mappings, al-though the concept of
UOV is used. We are only interestedin using UOV-based allocation in
conjunction with tiling.Thus, our allocation is partially
schedule-dependent. Theoverview of our storage mapping strategy is
as follows:
1. Extract polyhedral representations of programs
(arrayexpansion.)
2. Perform schduling and apply the schedules as transfor-mations
to the iteration space2. After the transforma-tion, lexicographic
scan of the resulting iteration space
2This can be viewed as pre-processing to code generation
[2].
14
-
respects the schedules. The resulting space should be(partially)
tilable to take advantage of our approach.
3. Apply UOV-guided index-set splitting (Section 6.)This step
attempts to isolate boundaries of statementdomains that negatively
influence storage mappings.
4. Apply QUOV-based allocation (Section 4.) Our pro-posed
storage mapping based on extensions to theUOVs are applied to each
statement after the split-ting. Although inter-statement sharing of
arrays maybe possible, such optimization is beyond the scope ofthis
paper.
The order of presentation does not follow the above fortwo
reasons. One is that the UOV-guided splitting is anoptional step
that can further optimize memory usage. Inaddition, splitting
introduces multiple statements to the pro-gram, and requires our
extension to handle multiple state-ments presented in Section
5.
4. QUOV-BASED ALLOCATION FORTILED PROGRAMS
In this section, we present a series of formalism to
ana-lytically find the shortest QUOV. We first develop a lemmathat
can eliminate dependences while constructing UOVs.We then apply the
lemma to find the shortest QUOVs indifferent contexts.
4.1 Relevant Set of Dependences for UOVConstruction
The trivial UOV, which also serves as the starting pointfor
finding the optimal UOV, is found by taking the sumof all
dependences. However, this formulation may lead tosignificantly
inefficient starting points. For example, if twodependences with
data-flow vectors [1, 0] and [2, 0] exist, theformer dependence may
be ignored during UOV construc-tion since a legal UOV-based
allocation using only the latterdependence is also guaranteed to be
legal for the former de-pendence.
We may refine both the construction of the trivial UOVand the
optimality algorithm by reducing the set of depen-dences considered
during UOV construction. The optimal-ity algorithm presented by
Strout et al. [19] searches a spacebounded by the length of trivial
UOV using dynamic pro-gramming. Therefore, reducing the number of
dependencesto consider will improve both the trivial UOV and the
dy-namic programming algorithm.
The main intuition is that if a dependence can be tran-sitively
expressed by another set of dependences, then it isthe only
dependence that needs to be considered. This isformalized in the
following lemma.
Lemma 1 (Dependence Subsumption). If a depen-dence f can be
expressed as compositions of dependences ina set G, where all
dependences in G are used at least once inthe composition, then a
legal UOV with respect to f is alsoa legal UOV with respect to all
elements of G.
Proof. Given a legal UOV with respect to a single de-pendence f
, the value produced at z is preserved at leastuntil z′ defined by
f(z′) = z, can be executed. Let the setof dependences in G be
denoted as gx, 1 ≤ x ≤ |G|. Sincecomposition of uniform functions
is associative and commu-tative, there is always a function g∗
obtained by composing
dependences in G, such that f = g∗ ◦ gx for each x. Thus,all
points z′′, gx(z′′) = z, are executed before z′ for allx.
Therefore, a legal UOV with respect to f is guaranteedto preserve
the value produced at z until all points thatdirectly depend on z
by a dependence in set G have beenexecuted.
Finding a composition in the above can be implemented asan
integer linear programming problem. The problem mayalso be viewed
as determining if a set of vectors are linearlydependent when
restricted to positive combinations. Theunion of all sets G, called
subsumed dependences, found inthe initial set of dependences can be
ignored when construct-ing the UOV.
Applying Lemma 1 may significantly reduce the num-ber of
dependences to be considered. However, the triv-ial UOV of the
remaining dependences may still not bethe shortest UOV. For
example, consider data-flow vectors[1, 1], [1,−1], [1, 0]. Although
the vectors are independentby positive combinations, the trivial
UOV [3, 0] is clearlylonger than another UOV [2, 0]. Further
reducing the setof dependences to consider requires a variation of
Lemma 1that allows f also to be a composition of dependences.
Thisleads to complex operations, and the dynamic
programmingalgorithm for finding optimal UOV by Strout et al. [19]
maybe a better alternative. Instead of finding the shortest UOVin
the general case, we show that such UOV can be foundvery
efficiently for a specific context, namely tiling.
4.2 Finding the Shortest QUOV for Tiled Pro-grams
When UOV-based allocation is used in the specific con-text of
tiling, the shortest QUOV can be analytically found.If we know that
the program is to be tiled, we can adddummy dependences to restrict
the universality of the stor-age mapping, while maintaining
tilability. In addition, wemay assume that the dependences are all
non-positive (forthe tilable dimensions) as a result of
pre-scheduling step toensure the legality of tiling. For the
remainder of this sec-tion, the“universe”of UOVs is one of the
following restricteduniverses: fully tilable, fully sequential, and
mixed sequen-tial and tilable.
Note that the expectation is that “tilable” iteration spacesare
tiled in a later phase. We analyze iteration spaces thatwill be
tiled using QUOV, and then apply tiling. We alsoassume that the
iteration points are scanned in the lexico-graphic order within a
tile.
Theorem 1 (Shortest QUOV, Fully Tilable).Given a set of
dependences I in a fully tilable space, theshortest QUOV u for
tiled execution is the element-wisemaxima of data-flow vectors of
all dependences in I.
Proof. Let the element-wise maxima of all data-flow vec-tors be
the vector m, and fm be a dependence with data-flowvector m. For
unit vectors ud in each of the d dimensions, weintroduce dummy
dependences fd with data-flow vector ud.Because these dependences
have non-negative components,the resulting space is still tilable.
For all dependences in Ithere exists a sequence of compositions
with the dummy de-pendences to transitively express fm. Using Lemma
1, theonly dependence to be considered in UOV construction
cantherefore be reduced to fm, which has the trivial UOV of m.
It remains to show that no QUOV shorter than m existsfor the set
of dependences I. The shortest QUOV is defined
15
-
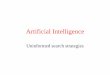
`
i
j Data-flow Vectors
Dummy Vectors
Element-wise Maxima
Bounds by Maxima
Points with M. Distance 4
Figure 1: Illustration of Theorem 1 for the set of depen-dences
with data-flow vectors [2, 0], [2, 1], [1, 2], and [0, 2].The
element-wise maxima of the data-flow vectors corre-spond to the
shortest UOV. The value produced by the bot-tom left iteration is
used by the destination of the data-flowvectors. The data-flows
induced by dummy dependencesguarantees that the iteration pointed
by the element-wisemaxima is only executed after all iterations
that depend onthe bottom left. None of the other iterations with
the sameManhattan distance (4) can be reached, since it
requiresbackward data-flow along at least one of the axes.
by the closest3 point from z that can be reached from alluses of
z by following the dependences. Since the choice ofz does not
matter, let us use the origin, ~0, to simplify ourpresentation.
This allows us to use the data-flow vectorsinterchangeably with
coordinate vectors.
Then, the hyper-rectangle with diagonal m includes allI, and all
bounds of the hyper-rectangle are touched byat least one
dependence. Since all dependences in a fullytilable space are
restricted to have non-negative data-flowvectors, no points within
the hyper-rectangle can be reachedby following dependences. Thus,
it is clear that m is theclosest common point that can be reached
by those thattouch the bounds.
The theorem is illustrated in Figure 1, and is contrastedwith
the trivial UOV used by Strout et al. [19] in Figure 2.
The basic idea of inserting dummy dependences to restrictthe
possible schedule can be used beyond tilable schedules.One
important corollary for sequential execution is the fol-lowing.
Corollary 1 (Sequential Execution). Given a setof dependences I
in an n-dimensional space where lexico-graphic scan of the space is
a legal schedule. Let m be thelexicographic maximum of the
data-flow vectors of all depen-dences in I. Then the shortest QUOV
u for lexicographicexecution is either m or the vector [m1 + 1, 0,
· · · , 0] wherem1 is the first element of m.
Proof. For sequential execution, we may introducedummy
dependences to any lexicographically precedingpoint. Then the
dependence, with a data-flow vector whosefirst element is m1 can
can subsume other dependences withlower values in the first element
according to Lemma 1 byintroducing appropriate dummy
dependences.
3Shortest and closest are both in terms of Manhattan
dis-tance.
i
j
Dynamic Programming Search SpaceTrivial UOVShortest QUOV
Data-flow Vectors
Shortest UOV
Figure 2: Comparison against the trivial UOV computedas proposed
by Strout et al. [19] for the same set of de-pendences as in Figure
1. The trivial UOV is [5, 5] and itbecomes the radius on the bounds
of the search space forthe dynamic programming algorithm proposed
by Strout etal. [19]. In contrast, Theorem 1 gives the shortest
QUOVby simply computing the element-wise maxima of the data-flow
vectors. Furthermore, the shortest fully universal UOVis twice as
long as the shortest QUOV, since the unit lengthdummy dependences
cannot be assumed. The search spaceis bounded by a sphere since
Euclidean distance is used byStrout et al. [19], but can be adapted
to Manhattan distance.
For the remaining dependences there are two possibilities:
• We may use dummy dependences of the form[1, ∗, · · · , ∗] to
let a dependence with data-flow vector[m1 + 1, 0, · · · , 0]
subsume all remaining dependences.
• We may use m as the QUOV following Theorem 1.
It is obvious that when the former options is used, [m1 +1, 0, ·
· · , 0] is the shortest. The optimality of the latter casefollows
from Theorem 1. Thus, the shortest UOV is theshortest among these
two options.
Note that m can be shorter than [m1+1, 0, · · · , 0] only whenm
= [m1, 0, · · · , 0]. In addition, although the above coro-rally
can be applied to tilable iteration spaces, the tilabilitymay be
lost due to memory-based dependences introducedby the
allocation.
The allocation given by the above corollary is
notschedule-independent at all. It is an analytical solutionto the
storage mapping of uniform dependence programs,where the schedule
is the lexicographic scan of the iterationspace.
The following corollary can trivially be established by
thecombination of the above.
Corollary 2 (Sequence of Tilable Spaces).Given a set of
dependences I in a space where a subset of
16
-
for (i=0:N)
S1[i] = foo();
for (j=0:N)
S2[j] = bar(S1[j]);
(a) When θS1 = (i→ 0, i, 0) and θS2 = (j → 1, j, 0).
for (i=0:N)
S1[i] = foo();
S2[i] = bar(S1[i]);
(b) When θS1 = (i→ 0, i, 0) and θS2 = (j → 0, j, 1).
Figure 3: Two possible schedules for statements S1 and S2.Note
that statement S1 in Figure 3a requires O(N) memorywhereas it only
requires a scalar in Figure 3b, although thecode shown is still in
single assignment.
the dimensions are tilable, and lexicographic scan is legal
forother dimensions, the shortest QUOV u for tiled executionof the
tilable space, and sequential execution of the rest isthe
combination of vectors computed for each contiguoussubset of either
sequential or tilable spaces.
Note that the above corollary only takes effect when thereare
sequential subsets with at least two contiguous dimen-sions. When a
single sequential dimension is surroundedby tilable dimensions, its
element-wise maxima and lexico-graphic maxima are equivalent.
Using the above, the shortest QUOV for sequential, tiled,or a
hybrid combination, can be computed very efficiently.
5. HANDLING OF PROGRAMS WITHMULTIPLE STATEMENTS
In many programs, there are multiple statements depend-ing on
each other. The original formulation of UOVs are forsingle
statement programs [19]. In this section, we show thatthe concept
can be adapted to multi-statement programs,knowing that we restrict
the universe to tiled execution ofthe iteration space.
5.1 Limitations of UOV-based AllocationAllocations based on UOVs
have a strong property that
they are valid for any legal schedule. Here, the schedule isnot
limited to affine schedules in the polyhedral model, andtime stamps
to each operation can be assigned arbitrarily, aslong as they
respect the dependences. The concept of UOVapplies to reuse among
writes to a single common space,and relies on the fact that every
iteration writes to the samespace (or array.) Different statements
may write to differentarrays, in programs with multiple statements,
and henceUOV cannot be directly used.
For example, consider a program with two statements S1and
S2:
• DS1 = {i|0 ≤ i ≤ N}• DS2 = {j|0 ≤ j ≤ N}
where the dependence is such that iteration x of S1 mustexecuted
before x of S2.
Figure 3 illustrates two possible schedules and its
implica-tions on memory usage. Note that we do not discuss
storage
mapping for S2, since it is not used within the code frag-ment
above. A fully universal UOV-based allocation wouldhave to take
account for such variations of a schedule, butsuch extension may
not even make sense. When two state-ments are scheduled
differently, the dependence between twostatements in the scheduled
space may no longer be uniform.
When we apply the concept of UOV for tiling, we areno longer
interested in arbitrary schedules. We first applyall non-tiling
scheduling decisions before performing stor-age mapping. Therefore,
the only change in the executionorder comes from a tiling
transformation viewed as a post-processing, so the same “schedule”
applied to all statementsinvolved. This allows us to extend the
concept of UOVs toimperfectly nested loops.
5.2 Handling of Statement OrderingWhen the ordering dimensions
are represented as constant
dimensions, the elements in the UOV require special han-dling.
In the original formulation there is only one state-ment, and thus
every iteration point writes to the samearray. When multiple
statements exist in a program, theiteration space of a statement is
a subset of the combinedspace, and are made disjoint by statement
ordering dimen-sions. Thus, not all points in the common space
correspondto a write, and this affects how the UOV is
interpreted.
Consider the program in Figure 3b. The only dependenceinvolving
S1 has data-flow [0, 0, 1], and since it is the onlydependence, it
is the shortest UOV. Literal interpretationof this vector as UOV
means that the iteration z + [0, 0, 1]can safely overwrite the
value produced by z. However, thisinterpretation does not make
sense in the context of by-statement allocation, since statement S2
at z+[0, 0, 1] writesto a different array.
We handle multi-statement programs by removing d outd + 1
constant dimensions for the purpose of UOV-basedanalysis. We apply
the following rule to remove constantdimensions by transferring the
information carried by thesedimensions to others. Let v be a
data-flow vector of a depen-dence in the scheduled space. We first
apply the followingrule to the vector v:
• For each constant dimension x > 0, where vx > 0, setvx−1
= max(vx−1, 1)
Once the above rule is applied, all the constant
dimensions,except for the first one, are removed to obtain d + 1
di-mensional data-flow vector. We repeatedly apply the aboveto all
dependences in the program, resulting with a set ofdata-flow
vectors with d+ 1 dimensions.
We justify the above rule in the following. When the con-stant
dimension of the data-flow is greater than 0, it meansthat some
textually later statement uses the produced value.With respect to
this particular dependence, the memory lo-cation may be reused once
this textually later statement hasbeen executed. However, there is
always exactly one itera-tion of a specific statement in a constant
dimension, since itis an artificial dimension for statement
ordering. Therefore,the earliest possible iteration that can
overwrite the memorylocation in question is in the next iteration
of the immediatesurrounding loop dimension.
For example, the only dependence of S1 in Figure 3b is[0, 0, 1].
The value produced by S1 at i is used by S2 ati, but only
overwritten by another iteration of S1 at i +1. Therefore, we
transfer the dependence information to a
17
-
for (t=0:T)
for (i=0:N)
A[i] = foo(A[i]); //S1
for (i=1:N)
A[i] = bar(A[i-1], A[i]); //S2
Figure 4: Example to illustrate influences of boundarycases.
Note that the value produced by S1 is last used byS2 of the same
outer loop iteration, except for when i = 0,in which case it is
used again by S1 at [t+ 1, 0].
preceding dimension.Projecting a d+1 dimensional domain along a
vector does
indeed produce a domain with d dimensions. This is be-cause in
the presence of imperfect nests, d dimensional stor-age may be
required for d dimensional statements even withuniform dependences.
Consider the code in Figure 3a. Theonly use of S1 is by S2 with
data-flow [1, 0, 0] in the sched-uled space. Applying the rule
described above removes thelast dimension, yielding [1, 0] as the
QUOV. Projecting thestatement domain of S1 (in the scheduled space
with d con-stant dimensions removed) along the vector [1, 0] gives
a two-dimensional domain: {i, x|0 ≤ i ≤ N∧x = 0}. Although
thedomain is two-dimensional, it is effectively
one-dimensionalbecause of the equality in the constant
dimension.
It is also important to note a special case when the UOVtakes
the form: [0, · · · , 0, 1]. When the last constant di-mension is
the only non-zero entry, it is obvious that thestatement requires
only a scalar, since its immediately con-sumed.
6. UOV GUIDED INDEX SET SPLITTINGIn the polyhedral
representation of programs there are
usually boundary cases that behave differently from the rest.For
instance, the first iteration of a loop may read frominputs,
whereas successive iterations use values computedby previous
iterations.
In the polyhedral model, storage mapping is usually com-puted
for each statement. With pseudo-projective alloca-tions, the same
allocation must be used for all points in thestatement domain.
Thus, dependences that only exist at theboundaries influence the
entire allocation.
For example, consider the code in Figure 4. The valueproduced by
S1 at [t, i] is last used by S2 at [t, i+1] for i > 0.However,
the value produced by S1 at [t, 0] is last used by S1at [t + 1, 0].
Thus, the storage mapping for S1 must ensurethat a value produced
at [t, i] is live until [t + 1, i] for allinstances of S1. This
clearly leads to wasteful allocations,and our goal is to avoid
them.
One solution to the problem is to apply a form of index
setsplitting [9] such that the boundary cases and common caseshave
different mappings. In the example above, we wish touse piece-wise
mappings for S1 at [t, i] where the mapping isdifferent for two
disjoint sets i = 0 and i > 0. This reducesthe memory usage from
an array of size N + 1 to 2 scalars.
Once, the pieces are computed, application of piece-wisemappings
can done through splitting the statements (nodes)as defined by the
pieces, and then applying a separate map-ping to each of the
statements after split. Thus, the onlyinteresting problem that
remain is finding meaningful splits.
In this section, we present an algorithm for finding the
split with the goal of minimizing memory usage. The algo-rithm
is guided by Universal Occupancy Vectors and worksbest with
UOV-based allocations. The goal of our indexset splitting is to
isolate boundaries that require longer life-time than the main
body. Thus, we are interested in a sub-domain of a statement with a
different dependence patternthan that in the rest of the
statement’s domain. We focus onboundary domains that contain at
least one equality. Theapproach may be generalized to boundary
planes of constantthickness using Thick Face Lattices [11].
The original index-set splitting [9] aimed at finding
betterschedules. The quality of a split is measured by its
influenceon possible schedules: whether different scheduling
functionsfor each piece yields a better schedule.
In our case, the goal is different. Our starting point isthe
program after affine scheduling, and we are now inter-ested in
finding storage mappings. When the dependencepattern is the same at
all points in the domain, splittingcannot improve the quality of
the storage mapping. Sincethe dependence pattern is the same, the
same storage map-ping will be used for all pieces (with a possible
exception ofthe cases when the split introduces equalities or other
prop-erties related to shape of the domains). Because two
pointsthat may have been in the nullspace of the projection maynow
be split into different pieces, the number of points thatcan share
the same memory location may be reduced as theresult of
splitting.
Thus, as a general measure of quality, we seek to ensurethat a
split influences the choice of storage mapping for eachpiece. The
obvious case when splitting is useless is when adependence function
at a boundary is also in the main part.We present Algorithm 1 based
on this intuition to reducethe number of splits.
The intuition of the algorithm is that we start with
alldependences with equalities in their domain as candidatepieces.
Then we remove some of the dependences wheresplitting does not
improve the allocation from candidatepieces. The obvious case is
when the same dependence func-tion exists in the non-boundary cases
(i.e., dependences withno equalities in their domain). In addition,
more sophisti-cated exclusion is performed using Theorem 1.
The algorithm can also be easily adapted for
non-uniformprograms. It may also be specialized/generalized by
addingmore dependence elimination rules to Step 2. This requiresa
method similar to Lemma 1 for other memory allocationmethods.
ExampleLet us describe the algorithm in more detail with an
ex-ample. The statement S1 in Figure 4 has three
data-flowdependences:
• I1 = S1[t, i]→ S2[t, i] when 0 ≤ i ≤ N
• I2 = S1[t, i]→ S2[t, i+ 1] when i < N
• I3 = S1[t, i]→ S1[t+ 1, i] when i = 0
The need for index-set splitting does not arise until someprior
scheduling fuses the two inner loops. Let the schedul-ing functions
be:
• θS1 = (t, i→ 0, t, 0, i, 0)
• θS2 = (t, i→ 0, t, 0, i, 1)
18
-
Algorithm 1 UOV-Guided Split
Input:
I: Set of uniform dependences that depend on a statement S. A
dependence is a pair 〈f,D〉 where f is the dependencefunction and D
is a domain. The domain is the constraints on the producer
statement.
Output:
P: A partition of DS , the domain of S, where each element
defines a piece of the split.
Algorithm:We first inspect the domain of dependences in I to
detect equalities.Let
Ib be the set of dependences with equalities, andIm be the set
of those without equalities.
Then,
1. foreach 〈f,D〉 ∈ Ib,
if ∃〈g,E〉 ∈ Im; f = g then remove 〈f,D〉 from Ib2. Further remove
dependences from Ib using the following if applicable:
(a) Theorem 1 and its corollaries. The following steps are only
for Theorem 1.
Let m be the element-wise maxima of dataflow vectors in
Im.foreach 〈f,D〉 ∈ Ib– Let v be the dataflow vector of f .– if ∀i :
vi ≤ mi then remove 〈f,D〉 from Ib.
3. Group the remaining dependences in Ib into groups Gi, 0 ≤ i ≤
n, where ∀X,Y ∈ Gi;DX ∩ DY 6= ∅. In other words,group the
dependences with overlapping domains in the producer space.
4. foreach i ∈ 0 ≤ i ≤ n, Pi =⋃
∀X∈Gi
DX
5. if n ≥ 0 then Pn+1 = DS \n⋃
i=0
Pi else P0 = DS
The data-flow vectors in the scheduled space, after remov-ing
constant dimensions (we also remove the outer-most onesince there
is only one loop at the outer-most level) are:
• I′1 = [0, 1] when 0 ≤ i ≤ N
• I′2 = [0, 1] when i < N
• I′3 = [1, 0] when i = 0
As the pre-processing step, we separate the dependencesinto two
sets based on the equalities in the domain:
• Ib = {I′3}; those with equalities, and
• Im = {I′1, I
′2}; those without equalities.
Then we use Step 1 to eliminate identical dependences. Ifthe
same dependence function is both in the boundary andthe main body,
separating the boundary does not reduce thenumber of distinct
dependences to be considered. There-fore, splitting such domain
does not positively influence thestorage mapping, and hence is
removed from further consid-
eration. Since I′3 is different from the other two, this
stepdoes not change the set of dependences for this example.
Step 2a is the core of this algorithm. The general ideais the
same as Step 1, but we use additional properties ofUOV-based
allocation to identify more cases where splittingdoes not
positively influence the storage mapping.
Theorem 1 states that if all elements of a data-flow vectorare
less than the corresponding element of the element-wisemaxima of
all data-flow vectors under consideration, the de-pendence does not
influence shortest QUOV. Therefore, ifthe candidate dependence to
split does not contribute tothe element-wise maxima, the split is
useless in terms offurther shortening the QUOV. As an illustration,
considerthe rectangle in Figure 1 defined by the element-wise
max-ima. If separating a dependence does not shrink the size ofthe
rectangle, the length of QUOV cannot be shortened.
In this example, the element-wise maxima of dependencesin Im is
[0, 1]. However, the boundary dependence has data-flow vector [1,
0], and when combined, the element-wise max-ima becomes [1, 1].
Therefore, the boundary dependencedoes contribute to the
element-wise maxima, and is not re-moved from the candidate set in
Step 2a. The dependencesthat are left in the set Ib after this step
are the set of de-pendences that will be split from the main
body.
Step 3 is a grouping step, where dependences to be splitare
grouped into those that have overlap in their domains.
19
-
Two sub-domains of a statement cannot be split into sepa-rate
statements, unless the computation is duplicated. Al-though
computing the values redundantly may be an option,we enforce the
two statements to be jointly split as one ad-ditional statement.
This step is irrelevant for our example,since our example only has
one dependence in set Ib.
The last step is a cleanup step, which adds the remainderof
splits to the set of partitions.
Let S1b be the statement after splitting the domain of I3from
S1, and S1a be the remainder of the main body of S1.The domain of
statements in the program are now:
• DS1a = {t, i|0 ≤ t ≤ T ∧ 1 ≤ i ≤ N}• DS1b = {t, i|0 ≤ t ≤ T ∧
i = 0}• DS2 = {t, i|0 ≤ t ≤ T ∧ 1 ≤ i ≤ N}
and the dependences are:
• I∗1 = S1a[t, i]→ S2[t, i] when 1 ≤ i ≤ N• I∗2 = S1a[t, i]→
S2[t, i+ 1] when i < N• I∗3 = S1b[t, i]→ S1a[t+ 1, i] when i =
0
The QUOV for S1a is [0, 0, 0, 0, 1] in the scheduled spacewith
constant dimensions, which is the aforementioned spe-cial case, and
only a scalar is required for S1a. The QUOVfor S1b is [1, 0] after
removing the constant dimensions. Theprojection of its domain along
this vector is also a constant,due to the equality in its domain.
Thus, the storage require-ment for S1 in the original program
becomes two scalars,which is much smaller than what is required
without thesplitting.
7. RELATED WORKThere is a lot of prior work on storage mappings
for poly-
hedral programs [1, 4, 5, 13, 15, 19, 20, 21]. Most
approachesfocus on the case when the schedule for statements are
given.
7.1 Efficiency of UOV-based AllocationBy the nature of its
strategy, UOV-based allocation, in-
cluding those using QUOVs, cannot yield more compactstorage
mappings compared to alternative strategies for aspecific schedule.
However, UOV-based allocation may notbe as inefficient as one might
think for programs that required − 1 dimensional storage. The
misconception is (at leastpartially) due to the trade-off between
memory usage andparallelism that is often overlooked. Consider the
followingcode fragment with Smith-Waterman(-like) dependences.
for (i=1:N)
for (j=1:M)
H[i,j] = foo(H[i-1,j], H[i,j-1]);
As illustrated in Figure 5, UOV-based allocation, evenwith
QUOVs, gives a storage mapping that use O(N + M)memory for this
program. However, the program cannotbe tiled if O(N) or O(M)
storage mappings are used dueto memory-based dependences. One
approach to still ac-complish tiled execution of this program is to
transform theprogram such that the iteration space is tilable even
whenthe memory-based dependences are under consideration.
For the above program, this requires a skewing as depictedin
Figure 6. Once the skewing is applied so that O(M)
i
j
(a) Iteration space and pos-sible storage mappings
i
j
(b) Set of live values in tiledexecution
Figure 5: Iteration space of Smith-Waterman(-like) codeand
possible storage mappings. Figure 5a shows two pos-sible storage
mappings, either horizontal or vertical projec-tion of the
iteration space. The size of memory is O(M)or O(N), depending of
the direction of the projection. Fig-ure 5b shows the iteration
space after tiling, and the val-ues that are live after executing
two tiles on the diagonal.Observe that neither projection
(horizontal or vertical) canstore all the live values. One example
of a valid projec-tive storage mapping is the projection along [1,
1] that useO(N +M) memory.
storage mapping can be tiled, the UOV-based allocation forthe
same program will also yield a storage mapping withO(M) memory.
Note that the skewed iteration space hasless parallelism (longer
critical path length) when comparedto the original rectangular
iteration space. The parallelismis effectively traded off with
decreased memory usage.
For this exam