Embed Size (px)
Citation preview

Li 1
Zimu, Li
College Research Technology
Ms. Simmons
15th April 2014
Robotics and high-school level robotics construction, programming and development
Robotics is a new term from the 20th century; it describes a new subject that will make a
great influence in future time. Recently, robotics affect military, industry and education, and I
believe robots will affect medical treatment and housekeeping in the future. By researching, I
believe that robots will replace human worker's job gradually. In addition, more specifically, I
am going to talk about high-school level robotics construction and programming. During the
high-school level robotics construction researching, I collected facts and information about the
parts that we are using for construction, and explained the application of parts based on my
experience. For robotics programming, I worked on both graphic programming software, which
is LabVIEW, and language programming software, which is Bricx CC, and then analyzed the
advantages of both programming software. I also did an interview with my robotics director to
ask about the experience he has on both software programs then I will make a comparison
between these two types of programming. In a word, my research is all about the subject robotics
and high-school level robotics construction and programming.
First, I looked at the definition of robotics on Merriam-Webster:
Design, construction, and use of machines (robots) to perform tasks done traditionally
by human beings. Robots are widely used in such industries as automobile manufacture
to perform simple repetitive tasks and in industries where work must be performed in
environments hazardous to humans. Many aspects of robotics involve ARTIFICIAL

Li 2
INTELLIGENCE; robots may be equipped with the equivalent of human senses such as
vision, touch, and the ability to sense temperature. Some are even capable of simple
decision making, and current robotics research is geared toward devising robots with a
degree of self-sufficiency that will permit mobility and decision-making in an
unstructured environment. Today's industrial robots do not resemble human beings; a
robot in human form is called an android. (Merriam-Webster)
Robotics is one of the newest technologies for 21st century. It is kind of technology that
uses machine to do human’s work. The influence of robotics, either android or industry robot
will be enormous. The main reason I believe it will happen is that a robot could have all the
sense that a human has and it could have more sense than a human, for example, a GPS receiver
will help a robot locate itself anywhere on the earth, but a human cannot. A robot is also able to
finish more physical task than a human. And robots are more rapidly, more accuracy and more
industrious.
The history of robotics can be traced back to 1921,
Karel Capek used the word Robot in his 1921 play Rossum’s Universal Robots, derived
from the Czech word robota, meaning”forces labor.” These Robots were created to
replace man and, in their simplified form, as cheap labor.(Edwin Wise 1)
The sign of a new technology taking place is the point that people starting to use the term
of this technology, same thing with robotics. The purpose of the first imagination of robot is for
replace human’s job. Robot have been seen as a machine that tougher than human since we start
using this term, and it is also be seen as then smart machine that serve human.
Science fiction writer Isaac Asimov first used the word "robotics" to describe the technology of
robots and predicted the rise of a powerful robot industry.

Li 3
I also did a research of the term robotics:
The term robotics refers to the study and use of robots; it came about in 1941 and was
first adopted by Isaac Asimov, a scientist and writer. It was Asimov who also proposed
the following “Laws of Robotics” in his short story Runaround in 1942. (Robot Shop)
We have to recognize that Asimov’s great prediction is right. In addition, the prediction
came out in that particular time, which is during the World War II, it reflected the wish that
people have in that time which is explore something to substitute their work.
Asimov also came up with a clue of laws of robotics in1942.
1. A robot may not injure a human being or, through inaction, allow a human being
to come to harm.
2. A robot must obey the orders given to it by human beings, except where such
orders would conflict with the First Law.
3. A robot may not injure its own kind and defend its own kind unless it is
interfering with the first or second rule.(Wikipedia)
This prediction indicated that he accept as true that the robots in future will be powerful
enough to wound a human. For preventing robots seizure control of the world, Asimov came up
with the laws of robotics, so we would not get terminated by something we created.
Mars, one of the terrestrial planets, is valuable for humans to explore. As we know, there
are tons of robots operated by NASA are driving on Mars right now. Robotics is the one of the
most important part of space exploration.
Raymond Goertz designed the first tele-operated articulated arm for the Atomic Energy
Commission. This is generally regarded as a major milestone in force feedback (haptic)
technology. (US Patent 2679940)

Li 4
Raymond Goertz made a major milestone on robotics in early of 1950s. A complete robot is
required to have the ability to sense and respond according to the program. Therefore, the tele-
operaeted articulated arm that Raymond Goertz constructed is the first generation of complete
function robot in human history.
Hiroshi Makino of Yamanashi University designed the Selective Compliant Articulated
Robot Arm (SCARA) for assembly jobs in factories.(Robot Shop) I believe that everybody
knows that the domain of robotics field right now is on industry. Most industry robots do not
look like androids but more likely an arm. Selective Compliant Articulated Robot Arm (SCARA)
is the principle use of robotics field and it is the most kinds of robots that we have now. Japanese
made the first modern industry SCARA in the robotics history, and the robot arms are getting
closer and closer to our life.
Today's industrial robots undertake a wider variety of jobs for which they are more
efficient and less costly than human workers. Common applications include materials
handing (moving parts from one assembly station to another), spot welding, and painting.
In 2003 alone, manufacturing companies in United States bought about $877 million
worth of industrial robots- a 19 percent increase over the previous year's total. The
automobile industry is still the leading over robot, purchasing about two-thirds of the unit
sold in 2003. (Henderson 26-27)
Robotics is in the golden age for industry, but it is still developing. There are obviously
some unfair advantages between robot and human workers. They cost less, work longer time in a
day, and make higher quality product. From the example of 2003, $877 million worth of robots
sold in one year, and it has increase by 19 percent from last year. The concept of robots in 80

Li 5
years ago is becoming true. Thousands of human workers are being replaced by robot. Robotics
is going to be the greatest invention in both 20th and 21st century.
By analyzing the facts and information, I believe that robotics is a useful and innovation
technology, and robots are replacing human worker’s job. Therefore, as a high-school student, I
will research and introduce how we are going to make a high-school level robot with LEGO
NXT.
LEGO® Mindstorms™ Robotics Invention System (RIS) ™ is a programmable toy. The
kit contains an assortment of blocks, pieces, sensors and motors that connect allowing the
student to produce objects limited only by imagination. The unique piece of the Invention
System is the programmable brick called the NXT that brings the model to life. The NXT
is programmable from a PC using an infrared transmitter (provided in the kit). There is a
simpler system, the Robotics Discovery Set, that also uses a brick, but this set is not
programmable from a PC. (Patterson-McNeill and Binkerd)
It is the step of constructing the shape of the robot. There is a reason that I selected
LEGO NXT as my research object, which is that NXT is easy for letting my audience understand
the concepts and ideas in the construction of robot. It is an advanced Lego building block, and I
believe that it is the best building blocks that I can use to do some research on robot construction.
I would like to start with the construction of a high-school level robot. I believe that
understandings of parts are the most important part of construction. Just as LEGO group said:
Once you have begun creating your own robots with the NXT set, you will soon ask a
simple but significant question: “How do I build great NXT robots?” Obviously, the NXT
set is capable of producing some impressive creations, but how do you utilize this
potential? Is there a secret to constructing robust, functional, and remarkable robots? Not

Li 6
really. The key is simply to master the use of the LEGO pieces in the NXT set. (LEGO
Mindstorms)
DC Motor is the engine of a Lego robot. The LEGO store describes the DC motor like
this Powerful rotation for your Power Functions! Add an extra XL-Motor to your LEGO
creations! This super-strong motor will give plenty of power to your models, whether it is
spinning a wheel or turning a system of gears. We usually use it to run the main wheel and due to
the property that a DC motor should have, there is no gearbox on the DC motor, but is still power
enough to run any Lego wheel.
The Lego servomotor also called Lego internals motor The Servo Motor has a built-in
rotation sensor that measures speed and distance, and reports back to the NXT Intelligent Brick
(sold separately.) This allows for precise steps and completes motor control within one degree of
accuracy! Several motors can be aligned to drive at the same speed. (Lego group). It has a simple
gearbox on it, which makes it more powerful, and it also has an angle sensor which allows the
servo motor to send the rotation information to the brain of robot. It is a very good servomotor
for robot arm and it is good for main engine for a competing robot.
After research and introducing the output parts, I would like to research inputs parts such
as sensors and share information about it.
Light Sensor is a necessary sensor for a competition robot, it identifies the gray scale of a
material. My robotics coach talked about light sensor during the interview:
The light sensor is one of many types of sensors provided with the NXT kit. This sensor
is capable of detecting variations of light and dark. Our robots have been able to follow a line,
change direction or execute various other commands to in response to a change in light intensity.
(Shannon Gottschalk) Usually, I use two lights Sensor on both right and left side to identify a

Li 7
black line between the two sensors and send the gray scale information back to the NXT. After
the information transit to the NXT, the NXT will follow the program on it, identify if the number
of the gray scale is greater or smaller than the adjustment number, then it will send out the order
for motor to the movement.
Touch sensor, or touch switch, is a type of switch that only has to be touched by an object
to operate. It is used in many lamps and wall switches that have a metal exterior as well as on
public computer terminals. Touchscreen includes an array of touch switches on a display. A
touch switch is the simplest kind of tactile sensor. (Wikipedia.) Touch Sensor is one of the
easiest sensors to understand, it works like a bottom. During the programming processing, there
are three states of a touch sensor, which are non-pressure, while press and releasing. When I was
programming the touch sensor part for a competition in 2009, I have to program the remote
controller, which allows the robot move while pressing, and stop while releasing. Therefore, I
program it as no movement while non-pressure, move motor on port B&C and stop motor from
port B&C while releasing.
Temperature sensor is an extra sensor for LEGO NXT. I have some experience of using
the temperature sensor. I found a journal talked about how they use a temperature:
To effectively monitor winter foraging activity by the cryptic, non-site-faithful Virginia
opossum (Didelph is Virginian), we tested the use of small data-logging temperature
sensors (iButton Thermachronso, Maxim/Dallas Semi-Conductors, Dallas, Tex.) attached
to a standard radio collar on 3 opossums over the winter of 2000-2001. Two replicate
sensors were required to clearly show time periods with cooler temperatures, an
indication that the animal was outside the den. These foraging bouts were consistent with
the available radio telemetry data. Daily duration of foraging showed a strong negative

Li 8
relationship with ambient temperature, quantitatively documenting for the first time a
phenomenon previously known only anecdotally. The iButton Thermachron seems to be
an effective, low-cost, and low-effort technology for monitoring foraging activities of any
animal that rests and forages in different temperature environment.
I remember once trying to make an automatic temperature controlling air fan, so I used a
temperature sensor to feedback the temperature information. The result of the performance was
not decent, because of the accuracy of the temperature sensing. However, I believe there will be
a lot of engineering fields needing temperature sensors.
Ultrasonic sensors (also known as transceivers when they both send and receive, but
more generally called transducers) work on a principle similar to radar or sonar,
which evaluate attributes of a target by interpreting the echoes from radio or sound waves
respectively. Ultrasonic sensors generate high frequency sound waves and evaluate the
echo, which is received back by the sensor. Sensors calculate the time interval between
sending the signal and receiving the echo to determine the distance to an object.
(Wikipedia)
Ultrasonic sensor is a useful sensor. I used it on my drone project in 2012. The basic
model of this drone is powered a complete advanced flight control system, and the ultrasonic
sensor is attached to the flight control. The concept of this quadcopter is that the controller is not
only able to order the motors directly, but also controlling the quadcopter by subroutine.
Therefore, the ultrasonic sensor is going to give a feedback of the height and plug the number
into the subroutine. From this program, I found that ultrasonic sensor works very well on height
sensing.

Li 9
We have been through the most important step, which knows the resources of a NXT kit.
Now, we can go to the Next step of construction, which is actually constructing the robot. From
my experience, it is not a hard step, the only things we have to worry about is habit. Whenever I
am going to build a large constructed robot, I always use Lego Digital Designer to design a
digital version first; I believe that is a very good habit for construction. The advantage for using
the digital designer before actually constructing is that saving time, have a copy of design and
save parts. After you design the robot digitally, you may just click view building mode, then the
software will create a building guide for you automatically. In addition, this is my design for my
product (figure1)
Figure 1. Zimu Li. Fork Union Military Academy. April 17, 2014.
Robots are similar to human somehow, because they have strong bodies and at the same
time, they have their own mind. However, the difference between human mind and robot mind is
that humans think by themselves, robots think by the program that humans put on it. Therefore,

Li 10
programming is one of the most important parts of building a high-school level robot. In this
section, I will show two types of programming software and make a comparison between them.
First, I would like to bring up a conversation between my coach and me.
Q: Sir, as we know that we used LabVIEW during the competition, are you familiar with
it? Can you talk about the advantages of it?
A: I am most familiar with LabVIEW. I have programmed a manipulative involving
temperature using this software. Its parameters were intuitive, yet some of the interface
was awkward to navigate. Our team was able to program an autonomous forward, drop
and turn line of code for our competition this year. They were also able to program a
remote control using the software. (Shannon Gottschalk, Zimu Li)
LabVIEW is very good programming software program; the graphic programming is the
best part of it. The graphic programming makes the logic of a program very easy to see and you
do not have to worry about vocabulary error of the program, because all language is already pre-
program as an icon. LabVIEW is good for beginner and new team.
More advanced, there is a programming software call Bricx Command Center, it is NXC
language-programming software.
NXC Language – an introduction to this language will be given, with web references to
manuals and tutorials. Basic API functions to control motors, display values on the LCD
and use sensors will be covered. Basic differences between C and NXC will be
highlighted. The sample GUI program demonstrated in step 2 will be translated into
NXC. Participants can follow along on their systems during this phase. ( David W.
Eggert).

Li 11
The biggest advantage of this programming software is that you are actually
programming when you operating on this software. It is language programming so you can use
vocabulary that is more advanced and logic whiles you programming, it also allows a robot to
finish harder action.

Li 12
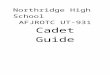
Figure 2, Zimu Li, Fork Union Military Academy, April 16, 2014
The picture above that I made on 16 April indicated two exactly same function programs
with two kinds of programming software. The left one is Bricx CC and the right one is
LabVIEW. This is a follow line program. The logical translation of this program is determined
the value of light sensor, if both are greater than 80, go straight, if left light sensor is below 48
then turn left, if right light sensor is below 48 then turn right.
I spend 2 minutes to type the language up, but dragging the icons cost me 7 minutes. That
is why I believe that traditional programming is better than graphic programming. It is faster,
more accuracy and more logical. From the research and compression, I believe that there is
enough proof to prove this point. Programming is an important of robotics, therefore choosing
good programming software is no doubt important, and I suggest everyone, which is on
advanced level to use traditional language programming software instead of graphic
programming software.
Robotics, one of the newest technologies in the world, now is replacing the human
worker's job. In education, robotics is important for students who are planning to enter the
robotics’ field in the future to do high-school level robotics. For high-school level robotics, there
are two important parts, which are construction and programming. In construction part, I did
explain why it is important to understand the usage of every part. In addition, I indicated another
point which is that making a digital version design of a robot before actually constructing it. In
programming part, I made a comparison between traditional language programming and graphic
programming. By research and comparison, I got the conclusion which is traditional
programming is better for advanced programmer; I suggest all advanced programmer use
traditional programming software to program their robot. By doing this research paper, I learned

Li 13
a lot about robotics. From the first day, that I start writing it to now I am finishing it, I went
through three books, four journal articles, many websites and an interview. The process of this
project taught me many things that not only academically but also scientifically. I hope this paper
will benefit more people who are in the same situation with me.

Li 14
Works Cited
Eggert, David W. "Pre-Conf Workshop." Using the Lego Mindstorms NXT Robt Kit in an
Introduction to C Prgramming Class (2007): 1-3. Print.
Gottschalk, Shannon. E-mail interview. 17 Apr. 2014.
Henderson, Harry. Modern Robotics: Building Versatile Machines. New York: Chelsea House,
2006. Print.
"History of Robotics: Timeline" ["History of Robotics: Timeline"]. Robot Shop. Robot shop,
2014. Web. 11 Apr. 2014. <http://www.robotshop.com/media/files/PDF/timeline.pdf>.
LEGO Group. "8882 XL motor" ["8882 XL motor"]. LEGO. LEGO Group, n.d. Web. 15 Apr.
2014. <http://powerfunctions.lego.com/en-us/products/default.aspx#8882>.
- - -. "Interactive Servo Motor." LEGO. LEGO Group, n.d. Web. 15 Apr. 2014.
<http://shop.lego.com/en-US/Interactive-Servo-Motor-9842>.
- - -. "Understanding The LEGO MINDSTORMS NXT Pieces." N.d. Digital file.
Patterson-McNeill, Holly, and Carol L. Binkerd. "ABSTRACT for LEGO® MINDSTORMS™."
Resources For Using LEGO® MINDSTORMS™: n. pag. Abstract. Print.
"Robotics" ["Robotics"]. Merriam-webster. Merriam-Webster, 2014. Web. 10 Apr. 2014.
<http://www.merriam-webster.com/info/copyright.htm>.
"Three Laws for Robotics." Wikipedia. Wikipedia, n.d. Web. 16 Apr. 2014.
<http://en.wikipedia.org/wiki/Three_Laws_of_Robotics>.
Wise, Edwin. Robotics Demystified. New York: McGraw, 2005. Print.
Zimu, Li. Figure 3, Fork Union Military Academy, April 17, 2014.
Zimu, Li. Figure 2, Fork Union Military Academy, April 16, 2014.