Embed Size (px)
Citation preview

Wave motion and spectral methods
Phys 750 Lecture 13

Wave equation‣ Wave motion is described by a partial differential
equation in time and position
‣ For example: vibrations on a generic string described by a displacement field evolving according to u(x, t)
⇥⇤2u
⇤t2+R
⇤u
⇤t= T
⇤2u
⇤x2� �
⇤4u
⇤x4+ · · ·
⇥ =
R =
T =
� =
mass per unit lengthloss coefficientline tensionnonlinear correction
x
u(x, t)

Wave equation‣ In the limit of small amplitudes, weak spatial
modulation, and slow vibrations, the PDE is linear:
‣ The wave velocity is a characteristic speed related to the string’s tension and mass per unit length
‣ Advection factoring:
�2u
�t2= c2 �2u
�x2
c =p
T/�
✓�
�t+ c
�
�x
◆✓�
�t� c
�
�x
◆u(x, t) = 0

Wave equation
‣ For an infinite string, any right- or left-travelling wave is a solution
‣ Lossless propagation
‣ Since the PDE is linear, all linear superpositions of solutions are also solutions:
x
F (x� ct)
F (x + ct)
u(x, t) = aF (x ± ct) + bG(x ± ct) + · · ·
x
envelopefunction

Space-time mesh‣ Naïve approach is to apply usual discretization techniques
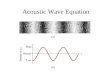
‣ PDE requires a double mesh:
‣ Numerical estimates of the time and space derivatives lead to a recurrence relationwith
u(n)i = u(i�x, n�t)
u(n+1)i + u(n�1)
i � 2u(n)i
(�t)2⇥ c2
�u(n)
i+1 + u(n)i�1 � 2u(n)
i
(�x)2
⇥
u(n+1)i = 2
�1� s2)u(n)
i � u(n�1)i + s2
�u(n)
i+1 + u(n)i�1
⇥
s = c�t/�x controls the stability of the recursion

Space-time mesh
x
t
nn+1
n−1
ii+1i−1
‣ How we assign the current field from its values at previous time steps — e.g., — is represented by a stencil:
u(n+1)i = 2
�1� s2)u(n)
i � u(n�1)i + s2
�u(n)i+1 + u(n)
i�1
�

Reflections‣ All finite systems have a
boundary, where the wave is contained by reflection
‣ A fixed end leads to reversal of motion and a phase shift
‣ Finite differences are troublesome there
�F (�x� c(t� tb))
F (x� ct)
⇡

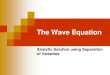
Reflections
x
ct
L
L
2L
ct = x
ct = 2L� x
‣ Single reflection event leads to the superposed solution
‣ With the understanding that foru(x, t) = 0 x > L
u(x, t) = F (x� ct)
� F (2L� x� ct)

Reflections
x
ct
ct = �x
ct = x� 2L
ct = 2L� x
ct = x
ct = 2L� x
ct = 2L+ x
ct = 4L� x
u(x, t) =1X
n=�1
⇥F (2nL+ x� ct)
� F (2nL� x� ct)⇤
‣ String segment undergoes an infinite number of reflections:
‣ Vanishes at and
‣ Periodic extension of the envelope function
x = 0x = L

Reflections
�F (�x� ct)
F (x� ct) = ���F (�(�x)� ct)
⇥
‣ A wave contained in a finite interval has a stable solution consisting of all multiply-reflected contributions
‣ Constructive parts: u(x, t) ⇥ F (x� ct)� F (�x + ct)

Normal modes‣ Suppose that the wave is confined to
‣ Barring pathological examples, the periodic extension of has a discrete Fourier representation
‣ The components are arbitrary except that the resulting envelope function must be real ( )
x � [0, L]
F (x) =⇥�
n=�⇥Fnein�x/L
F
Fn
F ⇤n = F�n

Normal modes‣ Waves in motion have the form
‣ Behaviour of each mode is determined by a characteristic wave-vector and angular frequency
F (±x� ct) =⇤�
n=�⇤Fne±iknxe�i�nt
kn =n�
L, ⇥n = ckn
n
�⇥2u
⇥t2= T
⇥2u
⇥x2��⇥2
nu = �Tk2nu ⇥n = (T/�)1/2kn = ckn

Normal modes
x = 0 x = L
u(0, t) = u(L, t) = 0
‣ Solution:
‣ Boundary conditions are automatically satisfied for all time
‣ Each mode is orthogonal to the others, and there is no energy transfer between them ( )an = 0
u(x, t) = F (x� ct)� F (�x� ct) =��
n=1
an sin knx cos �nt

Normal modes‣ From the initial conditions determine components by overlap with each mode:
‣ Complete behaviour at all subsequent times:
u(x, 0) =1X
n=1
an sin knx
an =1
L
Z L
0dxu(x, 0) sin knx
u(x, t) =1X
n=1
an sin�nx
Lcos
�nct
L

Truncation errors‣ Make tractable by putting a bound on the mode sums:
‣ Spatial resolution is set by the wavelength of the highest mode
‣ Discarded modes should have negligible power
�x = 2L/nc
1X
n=1
!ncX
n=1
� = 2⇥/kn = 2L/n
E =1
2
Zdx
✓⇥u
⇥t
◆2
+ c2✓⇥u
⇥x
◆2�
=1X
n=1
�n|an|2 �ncX
n=1
n2|an|2 +O((nc + 1)|anc+1|)2

Spectral method‣ Alternative strategy for more general PDEs that support
wavelike motion, e.g.,
‣ We can start from the ansatz
‣ Solve the space-only conventional ODE for each mode:
u(x, t) = un(x)ei!nt��t
@
2u
@t
2+ b
@u
@t
= c
2 @2u
@x
2+ f
@
4u
@x
4+ · · ·
(i!n � �)2un(x) + b(i!n � �)un(x)
= c
2u
00n(x) + fu
0000n (x) + · · ·

Spectral method
‣ View as a (real-valued, ) eigenequation
‣ Imposition of boundary conditions leads to a discrete eigenspectrum, corresponding to the normal modes
� = b/2
✓c
2 @
2
@x
2+ f
@
4
@x
4
◆un(x) =
✓�!
2n +
1
4b
2
◆un(x)