Embed Size (px)
Citation preview

Water vapor estimates using simultaneous dual‐wavelengthradar observations
Scott M. Ellis1 and Jothiram Vivekanandan1
Received 8 September 2009; revised 12 April 2010; accepted 20 May 2010; published 4 September 2010.
[1] A technique for the estimation of humidity in the lower troposphere using simultaneousdual‐wavelength radar observations is proposed and tested. The method compares thereflectivity from clouds and precipitation of a non‐attenuated wavelength (S‐band, 10 cm)and an attenuated wavelength (Ka‐band, 8 mm) to compute the clear‐air gaseous attenuationat the attenuated wavelength. These estimates are of total gaseous attenuation on radarray segments that extend from the radar to a cloud/precipitation echo or from one echo toanother. The attenuation estimates are then used to compute the path‐integrated humidity,which is plotted at the midpoint of the ray segments. Using estimates at several elevationangles and different ranges, a profile of humidity through the lower troposphere can beretrieved. The retrieved humidity compared favorably to proximity in situ soundings withroot mean square difference values between the retrieval and sounding ranging from 0.14 to0.85 g m−3 (approximately 2–6% relative error, respectively).
Citation: Ellis, S. M., and J. Vivekanandan (2010), Water vapor estimates using simultaneous dual‐wavelength radarobservations, Radio Sci., 45, RS5002, doi:10.1029/2009RS004280.
1. Introduction[2] The relatively strong gaseous attenuation of milli-
meter wavelength radar (e.g., Ka‐band, wavelength l =8 mm, frequency f = 35 GHz) is typically treated as asource of error that requires correction in order to obtaincalibrated equivalent reflectivity (Ze) measurements ofclouds and precipitation. Gaseous attenuation at thesewavelengths is mostly due to absorption by water vaporand oxygen molecules and is modified by variations in theatmosphere’s absorption spectrum line shapes due toDoppler and pressure broadening [Liou, 1992; Stephens,1994]. Therefore, correction of gaseous attenuation ispossible if the atmospheric conditions are known becauseit depends in a predictable fashion on the temperature,pressure, and humidity [Liebe, 1985]. Conversely, if thegaseous attenuation at millimeter wavelengths is mea-sured, it may be possible to solve the inverse problem, i.e.,retrieve information about the atmospheric conditionsfrom the gaseous attenuation value.[3] A collocated Ka‐band radar was recently added to
the National Center for Atmospheric Research (NCAR)10 cm wavelength (S‐band, f = 2.8 GHz) dual‐polarimetric
radar (S‐PolKa) enabling coincident S‐ and Ka‐band mea-surements [Keeler et al., 2000; Farquharson et al., 2005].For atmospheric conditions, the gaseous attenuation atS‐band is negligible compared to that at Ka‐band. Thereforein the right circumstances, it is possible to estimate gas-eous attenuation at Ka‐band by comparing the equivalentreflectivity factors of the two radars. This requires radarray segments through the clear atmosphere that intersectRayleigh scattering conditions at some further range, suchas illustrated by the solid black arrows in Figure 1. TheKa‐band gaseous attenuation estimates represent the totalattenuation over the length of the ray segment. Usingwave‐propagationmodel computations, the path‐integratedhumidity over the ray segment can then be estimated fromthe gaseous attenuation. Depending on the distribution ofsuitable echoes and the radar scanning strategy it may bepossible to obtain path‐integrated humidity estimates atseveral elevation angles and ranges resulting in estimatesthrough varying layers. These estimates are then used toretrieve humidity profiles in the lowest few kilometers ofthe atmosphere.[4] The goal of this study is to utilize the different
gaseous attenuation properties [Lhermitte, 1987; Rinehart,2004] at different wavelengths through the clear atmo-sphere to demonstrate the feasibility of using dual‐wavelength radar data, specifically S‐ and Ka‐bands, toretrieve atmospheric water vapor in the lower troposphere.[5] In section 2 we present some background informa-
tion concerning the motivation, microwave water vapor
1National Center for Atmospheric Research, Boulder, Colorado,USA.
Copyright 2010 by the American Geophysical Union.0048‐6604/10/2009RS004280
RADIO SCIENCE, VOL. 45, RS5002, doi:10.1029/2009RS004280, 2010
RS5002 1 of 15

retrievals, S‐PolKa radar system, the gaseous attenuationproperties and the data used in this study. Section 3 pro-vides a description of the dual‐wavelength humidity esti-mate methodology, and section 4 discusses error sourcesand the strategies to avoid or mitigate them. Resultsare presented and compared to in situ sounding data insection 5, and section 6 gives a discussion of the resultsand future work.
2. Background
2.1. Motivation
[6] Water vapor is one of the most important atmo-spheric variables for weather phenomena of many spatialand temporal scales. However, due to its highly variablenature, measurements that are sufficiently representativein both time and space are difficult to obtain [Fabry,2006]. Weckwerth et al. [1999] provides a meeting sum-mary of the Water Vapor Workshop in Boulder CO, 1998.Representatives from a number of disciplines expressedthe need for more and improved water vapor mea-surements with higher spatial and temporal resolution,including scientists studying: Boundary layer, chemistry/air pollution, hydrology, severe weather and convection,climate, polar regions, numerical weather prediction andquantitative precipitation forecasting. The improvementand development of active and passive remote sensinginstruments and techniques for retrieving water vapor wasstrongly recommended by scientific leaders. For example,operational soundings are typically sparse, e.g., they arenominally performed at 0000 and 1200 UTC in the UnitedStates on a distance scale of around 300 km. Changes in
the humidity profile that go unmeasured in betweensoundings can have serious implications for convec-tion initiation and evolution. Both convective availablepotential energy (CAPE) and total integrated rainwater aresensitive to the boundary layer mixing ratio [Crook, 1996;Weckwerth et al., 1999]. Crook [1996] showed that achange of 1 g kg−1 can be the difference between no stormsand convection producing heavy rains and flood poten-tial. Thus, timely and accurate boundary layer humidityprofiles are critical for interpretation of storm threat,numerical weather prediction of storms and subsequentquantitative precipitation forecasting. The proposedmethodcannot address all of these needs, but may provide addi-tional boundary layer/lower troposphere humidity infor-mation that is otherwise unavailable.
2.2. Microwave Retrievals of Water Vapor
[7] The idea of using microwave radiation to measurehumidity is not new. Humidity is measured routinely withpassive dual‐channel radiometers using the brightnesstemperature observations at K‐band [Hogg et al., 1983;Padmanabhan et al., 2009] and by the occultation ofsignals from the array of Global Positioning Satellites(GPS) and receivers at L‐band (950–1450 MHz [Beviset al., 1992]). Both dual‐channel radiometer and GPSmeasurements are used to obtain column integrated pre-cipitable water vapor estimates. Vertical humidity profilesare obtainable from multichannel radiometers that operateat K and V‐bands (50–75 GHz [Ware et al., 2003]).Padmanabhan et al. [2009] use tomographic inversion ofmicrowave brightness temperatures to retrieve high spatialand temporal resolution three‐dimensional water vapor
Figure 1. Illustration of three different radar based humidity estimates: the black arrows representthe path integrated dual‐wavelength humidity retrievals proposed in this paper, the white arrows rep-resent the triple wavelength retrieval through cloud proposed by Meneghini et al. [2005], and theblack dashed line represents the near‐surface refractivity based retrieval of Fabry [2004].
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
2 of 15

fields from multiple scanning radiometer measurements.This innovative new remote sensing technique was shownto be accurate within 15% to 20% [Padmanabhan et al.,2009]. In the case of the GPS technique, a network ofground‐based receivers and tomography methods on theslant path GPS delay measurements are used to estimatevertical profiles of humidity [MacDonald et al., 2002].Vertical resolutions of humidity profile estimates varybetween 0.5 and 1.0 km for the microwave radiometer andGPS‐based techniques. Accuracy of humidity measure-ments from microwave radiometer and GPS receivers aresensitive to the mean atmospheric temperature profile andzenith hydrostatic delay respectively [Van Baelen et al.,2005].[8] Until recently, weather radar has not been used to
estimate water vapor. However, recent studies have shownthat water vapor estimates can be made from radar usingboth absolute phase measurements from ground targets[Fabry et al., 1997; Fabry, 2004;Weckwerth et al., 2005]and triple‐wavelength measurements through clouds[Meneghini et al., 2005]. Fabry et al. [1997] showed that itis possible to compute, and track changes, in the refractiveindex of humid air by measuring the absolute phase of thebackscattered signal in between stationary ground targets.
Using surface temperature and pressure data (along with areference scan collected during relatively homogeneousconditions), the near‐surface humidity can be computedfrom the refractive index measurements. Meneghiniet al. [2005] showed the feasibility of a satellite based,downward looking, triple‐wavelength radar technique toretrieve water vapor and precipitation parameters withinthe clouds. These two techniques and the one proposedhere all complement one another well by providing radar‐based humidity estimates in different regions, i.e., near thesurface, within the clouds and in the clear air. The regionsof humidity retrieval for the three techniques from a singleground based radar system are illustrated in the cartoon inFigure 1. The proposed path‐integrated dual‐wavelengthestimates are represented by the solid black arrows, therange‐resolved near‐surface retrieval by the dashed blackline near the ground, and the triple wavelength retrievalsby the solid white arrows through the clouds.
2.3. S‐PolKa Radar System
[9] The Ka‐band antenna is mounted directly on the sideof the larger S‐band antenna (Figure 2) and the two radarshave matched beam widths (∼0.9 degree) and rangeresolutions (nominally 150 m). Several investigators havenoted the importance of spatially well‐matched data fordual‐wavelength radar methods [Rinehart, 2004; Hoganet al., 2005; Williams and Vivekanandan, 2007]. Thisincludesmatching the radar coverage in range, and pointingangle. The pointing angles of the S‐ and Ka‐band beamsare aligned primarily by comparing solar scans and sta-tionary point targets such as towers. To ensure the bestpossible range matching of the S and Ka‐band radarvolumes, the two systems are synchronized in time usingGPS clocks [Farquharson et al., 2005]. The resultingconsistency in range between the two wavelengths iswithin approximately a few meters.[10] The sensitivities of the two radars to Rayleigh
scatterers are similar. The increased sensitivity gained bythe shorter wavelength Ka‐band radar due to the factor of1/l2 that appears in the radar equation [Rinehart, 2004], isnearly offset by higher transmit power and lower noisefigure at S‐band. Additional sensitivity at Ka‐band maybe lost due to gaseous and liquid water attenuation. Theminimum detectable signal for the Ka‐band system for atypical dwell time is presented in Table 1 at several ranges
Figure 2. The S‐PolKa dual‐wavelength radar system.The 10 m diameter S‐band antenna and the 0.7 m diameterKa‐band antenna can be seen. Both radars have dual‐polarimetric measurement capabilities.
Table 1. Minimum Detectable Signal of the Ka‐Band Radara
Range (km) 1 3 10 30 50
0 dB km−1 attenuation −46.9 −37.4 −26.9 −17.4 −13.00.2 dB km−1 attenuation −46.7 −36.8 −24.9 −11.4 −3
aWith SNR equal to 3 dB at several ranges including both no attenu-ation losses and 0.2 dB km−1 gaseous attenuation loss (two‐way). Unitsare in dBZ.
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
3 of 15

for no propagation losses and for average propagationloss of 0.2 dB/km (two‐way).
2.4. Gaseous Attenuation Properties
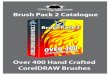
[11] Gaseous attenuation in the atmosphere at radiofrequencies is mainly due to absorption bywater vapor andoxygen molecules. The attenuation of the radar signaldepends on the transmit frequency and the temperature,pressure, and concentrations of the absorbing gases[Williams and Vivekanandan, 2007]. The attenuation canaccurately be computed for a given atmospheric state by amicrowave propagation model, as presented by Liebe[1985], which is used herein. The dependence of gas-eous attenuation on frequency and humidity was illus-trated clearly in Figure 1 of Lhermitte [1987] and isreproduced here in Figure 3, which shows the gaseousattenuation for the atmosphere (computed with the Liebe[1985] model) as a function of frequency for a variety ofwater vapor density (g m−3) values [Lhermitte, 1987]. Thegaseous attenuation increases with increasing frequency(decreasing wavelength) and with increasing humidity.Comparing the two S‐PolKa wavelengths in Figure 3 itcan be seen that the gaseous attenuation at S‐band(2.8 GHz frequency) is negligible in comparison to theKa‐band (35 GHz). For example, at sea level, 300 K and80% relative humidity the gaseous attenuation is about0.3 dB km−1 at Ka‐band, and about 0.0079 dB km−1 at
S‐band, or about 2.6% of the Ka‐band attenuation. TheKa‐band absorption shows well‐separated values for alarge range of water vapor density values. This sug-gests that the water vapor content could be estimated fromKa‐band gaseous attenuation measurements. Examin-ing Figure 3, it is clear that the frequency combination ofS‐ and Ka‐bands is not the only viable choice for dual‐wavelength radar humidity estimates. Considering onlythe attenuation properties, the longer of the two wave-lengths could be S‐, C‐, or X‐band and the shorterwavelength could be Ka‐, or W‐band.
2.5. Data
[12] The data used in the current study were obtainedfrom the NCAR S‐PolKa radar in two field programs: TheRain In Cumulus over the Ocean (RICO) experiment[Rauber et al., 2007] conducted in December and January2004/2005 on the islands of Antigua/Barbuda in theCaribbean Sea (S‐PolKa was on Barbuda), and theRefractivity Experiment For H2O Research And Collab-orative operational Technology Transfer (REFRACTT)conducted in the summer of 2006 along the Front Rangeof Colorado, USA [Roberts et al., 2008]. During RICO,atmospheric soundings measuring temperature, pres-sure, and dew point temperature were available from theNCAR Global Position Satellite (GPS) AtmosphericUpper air Sounding system (GAUS, http://www.eol.ucar.
Figure 3. One‐way atmospheric attenuation (dB km−1) plotted as a function of frequency (GHz)for different water vapor content values (g m−3) [from Lhermitte, 1987]. The S‐band (2.8 GHz)and Ka‐band (35 GHz) frequencies are indicated by the vertical dotted lines. The dashed curveindicates liquid water attenuation for a rain rate of 10 mm h−1.
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
4 of 15

edu/instrumentation/surface‐and‐sounding‐systems/gaus) located on the island roughly 11 km southeast ofS‐PolKa and from dropsondes [Hock and Franklin, 1999]deployed from theNCARC‐130 aircraft in close proximity.For verification during REFRACTT, the NCAR MobileGAUS (MGAUS) sounding system data were availableand the Denver National Weather Service Operationalsoundings (KDNR) were also available. The radar humid-ity retrievals were made at coincident times and locationswith the soundings in order to verify the results.
3. Water Vapor Retrieval Methodology[13] The method used to retrieve water vapor from dual
wavelength radar observations in this study includes thefollowing steps: (1) estimation of Ka‐band atmosphericgaseous attenuation, (2) retrieval of path integratedhumidity usingmicrowave propagation computations, and(3) estimation of a vertical profile of humidity. This sec-tion is organized as follows: section 3.1 describes theestimation of gaseous attenuation, section 3.2 describesthe retrieval of path integrated humidity, and section 3.3describes a method to combine individual humidity esti-mates into a single layer based humidity profile.
3.1. Attenuation Estimation
[14] The difference between S‐band and Ka‐bandreflectivity in the absence of absorption by liquid water,
non‐Rayleigh scattering and contamination by other radarartifacts are used to obtain estimates of the atmosphericattenuation along a segment of a radar radial. Thereflectivity differences are computed on small patches, orkernels, of data spanning several gates in range and azi-muth at the edge of echoes. The average of the measuredS‐ and Ka‐band reflectivity values (dBZS and dBZKa,respectively) over the kernel are computed. The averagesof reflectivity are computed in linear units (mm6 m−3)and converted back to dBZ. The gaseous attenuation(dB km−1) is estimated simply as
Ag ¼ dBZS � dBZKa� �
= 2L� �
; dB km�1 ð1Þ
where Ag is the one‐way gaseous attenuation in dB km−1
and L is the average path length of the gates in the datakernel.[15] There are several ways to obtain ray segments
suitable for estimating atmospheric attenuation. The first isto consider a ray segment through the clear atmospherethat begins at the radar and ends at the nearest edge of acloud echo. Such ray segments are called primary rays. Anexample of a primary ray is illustrated in Figure 4, whichshows PPI plots of Ka‐ and S‐band reflectivity obtainedduring RICO. The solid red arrow represents a primary raysegment extending from the radar to the first cloud echolabeled A.[16] It is sometimes possible to account for the total
attenuation that has occurred in a radar beam at inter-
Figure 4. PPI plots of (left) Ka‐band and (right) S‐band reflectivity values. The arrows are meant toillustrate two methods of creating secondary rays for attenuation estimation (see text).
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
5 of 15

mediate ranges between the radar and a suitable target.This enables making a gaseous attenuation estimate over aray segment through the clear atmosphere that does notbegin at the radar. Ray segments that do not begin at theradar are called secondary rays. Two methods to estimateattenuation over secondary rays are illustrated in Figure 4.In the first method the atmospheric attenuation along theprimary ray segments from the radar to the cloud echolabeled A (solid red arrow) and the cloud echo labeled Bare computed first. Next the total gaseous attenuation toecho A is subtracted from the total attenuation measured tocloud B (illustrated by the dashed red arrow), located at anearby azimuth to A, but farther in range. The resultingattenuation value is valid over a ray segment extendingfrom the range of cloud A to that of cloud B, indicated bythe solid green arrow in Figure 4. The tolerance on validazimuth differences for secondary rays computed asdescribed above depends on the situation and the appli-cation and should be determined by individual inves-tigators. In relatively homogeneous conditions such as themarine environment of RICO larger azimuth differencescan be used. The data should be monitored for reflectivityfine lines or radial velocity discontinuities as these aresignatures of boundaries and may indicate variable con-ditions. In the present study, no more than ten degreesof azimuth separation was allowed. Another method tocompute gaseous attenuation on a secondary ray segmentuses only information along one radar ray that intersectsmore than one cloud echo. Consider clouds labeled C andD in Figure 4. The difference in S‐ and Ka‐band reflec-tivity values at the back edge (relative to the radar) of echo
C results from a combination of the atmospheric and liquidwater attenuation along the path from the radar to thatpoint (solid white arrow). By subtracting this attenuationvalue from the total attenuation measured at the nearestedge of echo D we are left with the atmospheric attenua-tion on a secondary ray from the back edge of echo C tothe nearest edge of echo D, indicated by the solid greenarrow.
3.2. Humidity Estimation
[17] Using the atmospheric attenuation estimation alonga primary or secondary ray segment, the path integratedwater vapor content is inferred using simulations with amicrowave propagation model. The model used in thisstudy is from Liebe [1985], which computes the atten-uation due to water vapor, liquid water and molecularoxygen absorption over propagation paths through atmo-spheric layers. Each model layer is defined by its depth aswell as pressure, temperature, and humidity at the bottomand top of the layers. The model of Liebe [1985] thenlinearly interpolates in between user‐defined layers.[18] The model was run numerous times to compute
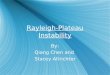
humidity as a function of Ka‐band atmospheric attenuationover the range of temperatures and pressures found duringRICO in the lower troposphere as observed by soundingstaken throughout the project. Figure 5 shows a scatterplot(pluses) of the model water vapor density (g m−3) versusthe model‐computed one‐way atmospheric attenuation(Ag, dB km−1). The scatter along the x axis is due to thedependency of Ag on temperature and pressure. The tightscatter indicates that these dependencies over the range ofpressure and temperature in question are small.[19] The best fit line is plotted in Figure 5 as the solid
line. The third degree polynomial fit yielded the followingequation for water vapor density (q, in g m−3),
q ¼ 201:40Ag3 � 209:60Ag
2 þ 120:55Ag � 2:25; ð2Þ
where Ag is the one‐way atmospheric attenuation.[20] A similar process was repeated for the conditions
at REFRACTT. The equation used on REFRACTT datawas
q ¼ 116:62Ag3 � 162:02Ag
2 þ 118:71Ag � 0:94; ð3Þ
which is plotted as the dashed line in Figure 5. It can beseen that for the same humidity (g m−3) there is slightlyless attenuation at the higher altitude of the REFRACTTobservations. This is due to the lower concentration ofmolecular oxygen at the lower surface pressure in Denver(about 850 hPa versus 1013 hPa at sea level). The path‐integrated water vapor estimates were computed by simplysubstituting the value of Ag estimated using equation (1)into equation (2) or (3).
Figure 5. Scatterplot of water vapor density (pluses,g m−3) versus one‐way attenuation (dB km−1) computedfrom the Liebe [1985] microwave propagation model forthe conditions at RICO, overlaid with the third orderpolynomial fit curve (solid line).The third order polyno-mial best fit resulting from the conditions at REFRACTTis plotted as the dashed line.
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
6 of 15

3.3. Estimation of a Layer‐Based Humidity Profile
[21] Next, a layer‐based vertical profile of humidityis computed by accounting for the gaseous attenuationmeasured in lower layers in the estimates of attenuationat higher levels. To illustrate the retrieval, consider twoKa‐band attenuation measurements at single elevationangles: The first from 0 to 2 km height above the radar(RAY02) with a total attenuation of 4 dB and the secondfrom 0 to 4 km (RAY04) with a total attenuation of 5 dB.The individual estimated humidity values from RAY02 atthe midpoint of the ray segment would result in ahumidity estimate at 1 km height that corresponds to 4 dBof attenuation over the 0 to 2 km layer. Similarly thehumidity estimate from RAY04 would be at 2 km heightand correspond to 5 dB of attenuation over the 0 to 4 kmlayer. However, the total attenuation measured in the 0 to2 km layer can be subtracted from the total attenuation inthe 0 to 4 km layer. This would provide the additionalinformation that the layer from 2 to 4 km accounts for only1 dB of the total gaseous attenuation in RAY04. Thehumidity that corresponds to 1 dB of total attenuation from2 to 4 km can be computed and is fully consistent with theattenuation measurements of both layers. The follow-ing simple algorithm was developed and tested in order tocompute such a layer‐based profile of humidity from thedual‐wavelength estimates.[22] First, a number of measurements of average Ka‐
band gaseous attenuation (dB km−1) were made for dif-ferent primary ray segments at various maximum heightsabove the radar. Next, layer mean attenuation values werecomputed over several different layers. The maximumheight variations for the primary ray segments used todefine a layer was 0.25 km and the top of the layer (Hi,where i denotes the layer number) was computed as themean height of the ray segments.[23] Now that we have defined a lower troposphere with
various average attenuation values over different layers ofdifferent thickness, we could then determine the totalgaseous attenuation of a Ka‐band radar beam propagatingthrough this lower troposphere. Therefore, the total atten-uation in dB (Ai
T) was then computed for each layer atHi from the layer mean attenuation (dB km−1).[24] Next the total attenuation in between layers 1 and 2
(A2T*) could then be computed by subtracting A1 from A2
resulting in the total attenuation from H1 to H2, which isvalid at the height of, H*2 =H1 + (H2 −H1)/2. Or in generalfor n layers,
AT*1 ¼ A1;
AT*i ¼ Ai � Ai�1; i ¼ 2; 3; . . . n
and
H*1 ¼ H1;
H*i ¼ Hi�1 þ Hi � Hi�1ð Þ=2; i ¼ 2; 3; . . . n:
These total attenuation values were then converted toattenuation in dB km−1. Finally the attenuation valueswere substituted into equation (2) or (3) to obtain the watervapor density.
4. Error Sources and Mitigation[25] This section describes sources of error and the
methods to avoid or mitigate them. There are severalsources of error that may impact the atmospheric attenu-ation estimates and subsequently the humidity estimates.In order to check if reasonable humidity estimates can beobtained with the procedure outlined above, it is deter-mined what levels of attenuation estimate error lead toacceptable humidity estimate errors. Therefore the goal isto determine the humidity error that results from errorsin the difference, dBZS � dBZKa (DZ). In this way criteriafor the acquisition and processing of ray segments canbe designed to keep the humidity errors within a pre-determined goal, for example 5% error.[26] It can be seen in equation (1) that errors in attenu-
ation estimates due to radar measurement errors are afunction of path length and proportional to 1/(2L). Thus,for a given reflectivity difference error, the attenua-tion error decreases with increasing path length. Thewater vapor density errors resulting from the errors inatmospheric attenuation estimates can be found usingequation (2) or (3) and are plotted using equation (2) inFigure 6. Examine Figure 6 for a reflectivity differenceerror of 0.5 dB (solid line) within the constraint of a 5%relative error. In a humid environment of water vapordensity on the order of 20 g m−3, 5% relative error wouldbe 1 g m−3 and the minimum length for a ray segment isabout 15 km. In a drier environment with water vapordensity on the order of 10 g m−3, 5% relative error wouldbe 0.5 g m−3 and the minimum length of a ray segment isabout 30 km. Thus in a drier climate the horizontal andvertical resolution obtainable is less than in more humidregions.[27] Errors in DZ can come from several sources
including contamination by non‐Rayleigh scatterers, orother radar artifacts, measurement fluctuations (or noise),or differences in the absolute calibration of the S‐ andKa‐band radar reflectivity. Errors due to calibrationdifferences are difficult to mitigate and result in a biasin the humidity retrievals that use primary ray segments.
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
7 of 15

The relative calibrations of the S‐ and Ka‐band radars canbe checked comparing uniform drizzle echoes at shortranges. Secondary rays are not impacted by calibrationerrors. The data selection and processing criteria describedbelow have been designed with the goal to keep the errorsin DZ at or below 0.5 dB.
4.1. Errors Due to Reflectivity Variance
[28] The measurement variance of the two radars can bemitigated by averaging a number of radar range gateseither in range or in azimuth or some combination. It mustbe determined how many radar gates must be averaged tobring the variance to 0.5 dB. To this end, the variances ofthe power measurement of each radar were computedfollowing the procedures described by Keeler andPassarelli [1990], Doviak and Zrnic [1993], and Keelerand Ellis [2000] for typical dwell times. Using theresults, the standard deviation values of DZ were com-puted for various spectrumwidth (SW) values and numberof gates averaged and Table 2 presents the results (dB).From Table 2 it can be seen that 10 or more radar gatesshould be averaged to keep the errors in the reflectivitydifference less than 0.5 dB.
4.2. Errors Due to Non‐Rayleigh Scatterers
[29] Any contaminant or artifact that violates Rayleighscattering in one or both wavelengths can cause errors inthe humidity estimates. Therefore, several criteria havebeen developed to help ensure the data used in the watervapor retrieval are appropriate. Non‐Rayleigh scatterers atS‐band include Bragg scatter, ground clutter contamina-
tion, bird echoes, and for Ka‐band also include raindropslarger than about 1 mm, insects and other large hydro-meteors. Ground clutter and bird echo reflectivity valuesare much larger at S‐ than at Ka‐band and are thereforeeasily identified and avoided.[30] Contamination by insect echoes is avoided in
the analysis using the dual‐polarimetric capabilities atS‐band. Insect echoes generally have differential reflec-tivity (ZDR) values greater than 2 dB [Zrnic and Ryzhkov,1998; Vivekanandan et al., 1999], which is much higherthan the drizzle and cloud echoes of interest (ZDR <0.5 dB). The distinction between insect echoes and thecloud/drizzle echoes of interest can be made automaticallyusing echo classification algorithms as described byVivekanandan et al. [1999] and Liu and Chandrasekar[2000].[31] The echoes used must have reflectivity values that
are not significantly impacted by Bragg scattering atS‐band. Two criteria were applied to mitigate the impactsof Bragg scattering. The first is based on the findings ofKnight and Miller [1998] who observed that in warmFlorida cumulus clouds with radar reflectivity above5 dBZ, Rayleigh scattering was usually the dominantscattering mechanism. Accordingly, no echoes withS‐band reflectivity below 5 dBZ were used. However, insome cases the S‐band Bragg echo of developing Floridacumulus were observed to be as large as 10 dBZ [Knightand Miller, 1998]. These clouds had an initial S‐band“mantle echo” dominated by Bragg scattering and thentransitioned to Rayleigh scattering as larger particlesformed beginning within the core of the cloud [Knight andMiller, 1998]. To be considered for the humidity retrieval,the second criterion requires the Rayleigh scattering coreecho to have at least 9 dB higher reflectivity than anysurrounding Bragg echoes. At Ka‐band it can be shownthat at the range of the minimum ray segment length(15 km) the Bragg scatter echoes are below the minimumdetectable level (see Knight and Miller [1993] andWilsonet al. [1994] for computations of relative Bragg scatterpower). Therefore, within the limitations of the radarsensitivity, the S‐band Rayleigh echo region can be
Table 2. The Standard Deviations of the Estimated DifferencedBZS � dBZKa Computed Using Spectrum Width Values of1, 2, and 3 m s−1, and Number of Averaged Gates of 1, 10,and 20a
SW (m s−1)
Standard Deviation of the Reflectivity Difference (dB)for Number of Gates Averaged
1 10 20
1 1.54 0.55 0.402 1.14 0.40 0.283 0.95 0.32 0.23
aSW, spectrum width.
Figure 6. A plot of the error in water vapor density(g m−3, y axis) as a function of range (km, x axis) for anerror in the difference between S‐ and Ka‐band reflectivityof 0.5 (solid line) and 1.0 (dashed line) dB.
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
8 of 15

defined by the Ka‐band reflectivity. The 9 dB threshold isthe level at which the weaker echo would contribute about0.5 dB to the total reflectivity within a mixed Bragg andRayleigh echo.[32] Drops of diameter of less than roughly 1 mm
satisfy the Rayleigh scattering condition at Ka‐band[Vivekanandan et al., 2001; Lhermitte, 1987]. Therefore,the maximum drop diameter (Dmax) in the radar volumemust not exceed 1 mm. To ensure this condition is met,Dmax is computed using the S‐band dual‐polarimetricdata. The median dropsize diameter (D0) is estimated fromthe S‐band Z and ZDR values followingBeard andChuang[1987]. The Dmax can be approximated as twice D0
[Vivekanandan et al., 2004], and data with estimatedDmax values exceeding 1.0 mm were rejected.
4.3. Errors due to Attenuation by Liquid
[33] Errors in the humidity estimates can be caused byattenuation through liquid drops. Liquid attenuation mightbe attributed to the gaseous attenuation, and the result is anoverestimate of Ka‐band gaseous attenuation and thus anoverestimate of humidity. This can occur in two ways:First the liquid attenuation may become significant ifthe data kernel collected to compare S‐ and Ka‐bandreflectivity values extends too far into the liquid waterecho, and second intervening liquid clouds may exist thatare below the detection limit of the radar.[34] To avoid liquid attenuation contamination from
within the selected data kernel, data were not collectedmore than 0.5 km into any cloud/precipitation echo. At therange resolution of S‐PolKa (nominally 150 m), this cor-responds to 3 gates in range. Therefore to obtain therequired 10 range gates (section 4.1) the data kernel mustcontain a minimum of 4 adjacent azimuths.[35] Clouds that exist in the absence of drizzle or larger
precipitation may have reflectivity values below the radarsystems detection limit, but enough liquid water content(LWC) to significantly attenuate the Ka‐band signal. Theminimum detectable reflectivity for the Ka‐band radar islisted in Table 1 at various ranges. If clouds below theminimum detectable reflectivity intervene in primary orsecondary rays, they will cause errors in the humidityretrievals.[36] Studies using in situ data by Fox and Illingworth
[1997] and Sauvageot and Omar [1987] found thatcumulus clouds in maritime air masses invariably containdrizzle droplets that dominate the reflectivity. Thereforethe likelihood of undetected intervening clouds in themaritime environment of RICO is low. It is more likelyto encounter undetected intervening cumulus clouds in acontinental environment such as the REFRACTT experi-ment. Although there are no definitive cloud size or LWCthresholds for precipitation formation in cumulus clouds,the likelihood of the formation of larger drops detectable
by radar increases with increasing cloud size (vertical andhorizontal extent) and LWC [Knight et al., 1983; Rangnoand Hobbs, 1994; Prupacher and Klett, 1997; Laird et al.,2000;Wang and Geerts, 2003]. For example, Knight et al.[1983] compared visual histories, in situ aircraft mea-surements and radar first echoes (defined as 5 dBZ) ofgrowing cumulus clouds in northeast Colorado. Theyfound that the largest values of LWCwere associated withvigorous updrafts. Further, the growing cumulus clouds inthe study produced the first radar echo within about 10minof the beginning of the visual record and within 1 min ofthe cloud top reaching the −20°C level (corresponding to acloud depth of 3 to 4 km). Furthermore the radar echospread to fill the visible cloud in 5–10 min of the first echo[Knight et al., 1983].Rangno andHobbs [1994] found thatcontinental cumulus clouds needed to be about 3 kmwide,or 50% wider than maritime clouds, to have a 95% prob-ability of producing a radar echo. The frequency andseverity of intervening cumulus clouds below the radardetection limits are impossible to quantify. However, theimplication of these studies is that cumulus clouds belowthe sensitivity of S‐PolKa at the ranges in question(Table 1) would tend to be small (<3 km) in height andwidth. Raypaths that were impacted by these clouds wouldappear as outliers in humidity profiles that utilize numer-ous raypaths and should be removed.[37] Stratiform clouds that are undetected by the radar
are more problematic. The algorithm should not be appliedin the presence of these clouds, which would clearly haveto be detected by other observations such as, satellites,ceilometers, lidars, observers, etc.
4.4. Correlation of S‐ and Ka‐Band Reflectivity
[38] To further identify radar data contaminates, a point‐by‐point linear (Pearson) correlation coefficient betweenS‐ and Ka‐band reflectivity values over each data kernelwas computed. Data kernels with correlation values lessthan 0.7 were rejected. The 0.7 threshold was chosensomewhat arbitrarily to ensure the S and Ka data exhibitedstrong correlations. If the S‐band and Ka‐band reflectivityvalues were dominated by different phenomena thereflectivity patterns might be different and the correla-tion would be lowered. Too high of a threshold wouldbe problematic because the measurement noise at the twowavelengths is independent and therefore reduces thecorrelation coefficient.
5. Results
5.1. Vertical Profile Verification
[39] Thewater vapor retrievals computedwith the RICOdata are compared to the proximity GAUS sounding.Figure 7 shows path integrated humidity estimates from10 January 2005 plotted at the midpoint of primary
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
9 of 15

(secondary) ray segments as pluses (crosses), while thesolid line shows the sounding data. The radar was scan-ning PPI volumes and the 1.5, 2.5, 3.5 and 4.5 deg scanswere used in the humidity estimates. Due to partial beamblockage of the Ka‐band, the 0.5 deg elevation scan wasnot used. The dashed line in Figure 7 shows a runningaverage of the sounding computed to mimic the resolutionof primary rays. For each height (H) the average humiditywas computed from the elevation of the radar (0.0 km inthis case) to 2*H and plotted. It can be seen that the small‐scale features of the humidity profile cannot be resolvedwith the primary rays, but that the overall trend and meanvalues are captured well. The secondary rays, which spanfrom one cloud to another, add some vertical granularity tothe retrieved values as can be seen by the crosses inFigure 7. The vertical dashed lines span the vertical extentof the secondary ray segments in the y axis and are plottedon the x axis at the location of the average humidity fromthe sounding over the extent of the ray segment. Thesecondary rays increase the vertical resolution of theretrievals. For example, consider the vertical extent ofthe secondary ray with a midpoint at a height of about
1.5 km, which has a vertical extent from about 0.8 km to2.2 km in height. This is much smaller than a primaryray with a similar midpoint height, which would span from0.0 km to 3.0 km above the radar.[40] For the 10 January case, the overall root mean
square difference (RMSD) of the radar retrieved humidityto the sounding data was 1.40 g m−3. It turns out that thisstatistic was disproportionately influenced by the primaryray that occurs at about 1.8 km height within an unre-solvable dry layer of the sounding (Figure 7). Excludingthis point, the RMSD is 0.85 g m−3.[41] Figure 8 shows the dual‐wavelength humidity
estimates from Figure 7 with the layer‐based humidityprofile computed as described in section 3.3 plotted as thethick dashed line. For reference, the sounding data wereaveraged over the same vertical layers used in the layer‐based humidity profile and are plotted as the thin dashedline. Despite differences, the layer‐based humidity profilegenerated from the dual‐wavelength radar measurementscaptures the main features, with similar values, as thelayer‐averaged sounding.[42] The next example includes humidity retrieval
results for 12 January 2005 and is shown in Figure 9.Similar to the previous example, the retrieved values(pluses) are close to the sounding data and the RMSD forthis case is 0.75 gm−3. The trend of decreasingwater vaporvalues with height is again well represented and the resultsare consistent with the first example. This is also reflected
Figure 7. Dual‐wavelength radar retrieved water vapordensity (g m−3) plotted as a function of height. The plusesrepresent humidity values computed with primary rays,and the crosses represent secondary rays. Data from aproximity sounding are plotted as a solid line. The dashedline is the mean of the sounding humidity from the radar toa height of 2 times the height plotted to estimate theexpected resolution of the radar humidity profile. The ver-tical extent of the secondary rays is represented by verticaldash‐dot lines, which are plotted at the x axis location oftheir average water vapor density from the sounding data.The data are from RICO on 10 January 2005.
Figure 8. Same data as Figure 7 but with the layer‐basedprofile of humidity retrieved as described in section 3.3plotted as the thick dashed line. For comparison, thesounding data averaged over the same layers used tocompute the vertical profile are plotted as the thin dashedline.
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
10 of 15

in the resulting layer‐based humidity estimate from thedual‐wavelength measurements (thick dashed line), whichcaptures the major features of the layer‐averaged sounding(thin dashed line).[43] Two examples of humidity retrievals from the
REFRACTT field campaign are presented in Figure 10.The retrievals were taken near 0000 UTC, on 26 July 2006(1800 local time), and result only from primary ray seg-ments. First consider the profile denoted by pluses inFigure 10. The profile is valid near the location of theNational Weather Service Denver sounding site (KDNR)located southeast of S‐PolKa. This facilitated verificationof the dual‐wavelength radar humidity estimates using the0000 UTC sounding, which is plotted as the solid linein Figure 10. It can be seen that the dual‐wavelengthhumidity estimates lie close to the NWS sounding. Thegradient of humidity with height of the retrievals is ingood agreement with the sounding. The RMS differencebetween the sounding and retrieval values is 0.14 g m−3 inthis case, much better than the RICO examples. This islikely because the REFRACTT echoes were at longerranges at around 40 km as compared to 15 to 20 km inRICO. Recall that water vapor density errors are inverselyproportional to path length. Also the fact that the echoesused in REFRACTT were more extensive in the azimuthdirection than for the RICO cases, allowed more gates tobe averaged and reduced the errors. The water vapor from
the sounding in the REFRACTT case is more smoothlyvarying than in RICO due to the coarser resolution as wellas the deeper mixed layer. In these conditions the dual‐wavelength water vapor estimation is expected to havelower RMS differences with the sounding.[44] The layer‐based humidity profile computed from
the dual‐wavelength measurements near the KDNRsounding site is plotted as the thick dashed line inFigure 10. This profile matches quite well the soundingdata and the layer‐average of the sounding data (notshown), which nearly overlap in this case.
5.2. Spatial Variability
[45] The dual‐wavelength radar humidity estimatesin Figure 10 denoted by the open circles were taken at0000 UTC but the primary ray segments used were to thenorth‐northeast of the radar. While the variability of theseestimates is similar to the 0000 UTC profile taken nearKDNR, they show systematically more moisture. ThisFigure 9. Radar retrieved humidity from RICO on 12
January 2005. The pluses represent primary rays, and thecross represents a secondary ray. The solid line is fromthe proximity sounding. The retrieved layer‐based profileof humidity is plotted as the thick dashed line, and thecomparable sounding average is plotted as the thin dashedline.
Figure 10. Radar retrieved humidity from REFRACTTon 25 July 2006. The pluses represent retrieval resultscoincident with the 0000 UTC KDNR sounding (solidline) to the southeast of the radar. The open circles repre-sent retrieval results to the northeast of the radar whereevaporation has increased the humidity levels in theboundary layer. The square is the humidity measured bya surface station the NWSKFTG radar site to the southeastof S‐PolKa at 0000 UTC, and the diamond is the humiditymeasured by a surface station collocated with S‐PolKa atapproximately 0012, after themoister air massmoved overthe area. The thick dashed line represents the layer‐basedprofile retrieved from the dual‐wavelength estimates nearKDNR.
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
11 of 15

could be explained by the presence of several heavy pre-cipitation systems over the previous hour in the directionof this profile. Thus evaporation could have locallyincreased the boundary layer humidity in this region.[46] The local increase of humidity is evidenced by
comparison to the GPS column integrated precipitablewater vapor (PWV) estimates shown in Figure 11. ThePWV estimates arise from the combination of occultationdata from each GPS signal receiving station, shown inFigure 11 as diamonds, in addition to the collocatedreceiver at S‐PolKa, denoted as a stars [Rocken et al.,1995; Ware et al., 2000]. At the analysis time data from10 satellites were available. It can be seen that the PWV tothe northeast of the S‐PolKa radar is greater than to thesoutheast toward KDNR. This supports the idea that theheavy precipitation to the north and northeast of S‐PolKahas increased the humidity in that region. The GPS pre-cipitable water vapor estimates are column integrated anddo not indicate what level the humidity signal comes from.Therefore, the refractive index estimates [Fabry et al.,1997; Fabry, 2004] from S‐PolKa were also examinedto verify an increase in low‐level humidity.
[47] Figure 12 shows the refractive index computedat 2355 from the S‐PolKa radar. The higher values to thenorth and northeast, as compared to the southeast, ofS‐PolKa indicate that the near‐surface atmosphere is morehumid. This is consistent with the GPS findings and sup-ports the moister dual‐wavelength retrieval looking north‐northeast in Figure 10.[48] The humidity measured by the surface station at the
S‐PolKa radar after the locally moistened air has advectedover the site at about 0012 UTC is plotted as a diamondin Figure 10. The first raindrops were recorded at the siteat 0056 UTC. The surface station humidity value of12.3 g m−3 is nearly 1.5 g m−3 more than the KDNRsounding at the same altitude, which is consistent withthe radar‐retrieved profile taken in the same, moister airmass. The square plotted in Figure 10 shows the surfacestation humidity at 0000 UTC from the NWS FrontRange radar site (KFTG), which is located approximately25 km to the east‐southeast of KDNR. The humiditymeasured at KFTG is consistent with the dryer air mass tothe southeast of S‐PolKa and is about 0.5 g m−3 dryer thanthe KDNR sounding value at the same level. Based on thethree independent data sources indicating moister air tothe north and northeast of S‐PolKa at 0000 UTC and theconsistency of the radar‐retrieved profile with the sur-face data, it is concluded that the higher humidity profileretrieved from that direction is valid.[49] The bias and RMSD of the layer‐based humid-
ity estimates from the dual‐wavelength radar estimatescompared to the sounding data averaged over the samelayers were computed using all of the comparison datafrom both RICO and REFRACTT. The bias was foundto be −0.13 g m−3 and the RMSD was 0.46 g m−3.
6. Discussion and Future Work[50] The results presented in this study show the utility
of S‐band and Ka‐band dual‐wavelength radar to retrieveenvironmental water vapor profiles through the lowertroposphere. Because the estimates are derived from totalpath atmospheric attenuation estimates of radar ray seg-ments, the retrieved profiles are not able to resolve finescale features. However, the magnitude of moisture andits gradient with height are well retrieved with rootmean square differences to in situ sounding data less than1 g m−3. The technique worked in both the humid envi-ronment of the Caribbean and the dryer environment ofColorado. It was demonstrated that the dual‐wavelengthradar humidity retrieval detected spatial variation inhumidity profiles resulting from changes in the boundarylayer humidity due to modification of the air mass byevaporation.[51] A technique to combine the humidity estimates
from the individual ray segments to estimate a layer‐based
Figure 11. Composite, column integrated, precipitablewater (mm) computed from the GPS stations shown bythe diamonds.
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
12 of 15

profile was proposed and demonstrated. The layer‐basedprofile can better represent the vertical variability in thewater vapor by taking into account the measured attenu-ation in successive layers. The vertical resolution of theprofiles ranged from about 0.25 to 0.5 km for the data inthis study. The vertical resolution is dependent on the radarscanning and distribution of suitable echoes.[52] Dual‐wavelength radar humidity estimates should
also be possible using different wavelength combinations.A potential advantage of using C‐ or X‐band as the long
wavelength is that ground clutter and Bragg scatter echoesare not as strong as at S‐band. However, the atmosphericattenuation is greater at these wavelengths, thereby reduc-ing the differential attenuation and the sensitivity of themethod. Using the more strongly attenuating W‐band(Figure 3) as the shorter wavelength has the advantage ofincreasing the sensitivity and reducing the required raysegment length. However, at W‐band drops satisfyingRayleigh scattering are < 0.3 mm making suitable targetsmore difficult to find.
Figure 12. Refractive index estimates from S‐PolKa at 2355 UTC on 25 July 2007.
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
13 of 15

[53] The technique is dependent on the clouds that arepresent to obtain estimates of gaseous attenuation andhumidity. For primary rays to be used it is necessary tohave ray segments through the clear atmosphere extendingfrom the radar to cloud or precipitation echoes that aregreater than 15 km in range in order to keep the retrievalerrors below 1 g m−3. For secondary rays to be used, raysegments of 15 km in length must exist in between indi-vidual echoes. The conditions favorable for primary raysare much more common than for secondary rays. Whilethe conditions that facilitate the use of the proposedtechnique are not uncommon, there are also many situa-tions that preclude or limit the method.[54] Clearly if no cloud or precipitation echoes are
detected the technique is not applicable. Echoes fromwidespread stratiform clouds (e.g., upslope or marinestratus clouds) present the problem that all primary raysegments will have a midpoint at the same height andtherefore would preclude a vertical profile of humidity,although the humidity could be monitored at one height.Humidity retrievals with primary rays are not possibleif rain, which attenuates the Ka‐band wavelength, isobserved over the radar system. Despite these limita-tions, the technique offers a viable option for accuratelyobserving lower troposphere humidity profiles in manysituations with high temporal resolution.[55] There are a number of areas of potential future work
on this topic. The first would be to automate the algorithmto facilitate real‐time use and analysis. Analyzing moredata from differing regions and weather conditions isnecessary to further define the proposed technique’spotential applications and limitations. It is planned tocombine the dual‐wavelength retrievals with humidityestimates from other radar methods as well as differentinstruments. The combination of the lower tropospherehumidity estimates described here with the near‐surfacehumidity retrievals via measurements of the refractiveindex [Fabry, 2004], is of particular interest becausethe estimates are complementary and are both currentlyavailable using S‐PolKa. The dual‐wavelength humidityretrievals could also be combined with other data andmodel sources to compute updated humidity profilesusing objective analysis techniques. Also of interest is theassimilation of the profiles into numerical weather pre-diction models of various scales.
[56] Acknowledgments. The National Center for AtmosphericResearch is sponsored by the National Science Foundation. Any opi-nions, findings, and conclusions or recommendations expressed in thispublication are those of the authors and do not necessarily reflect theviews of the National Science Foundation. The authors wish to thank EricNelson for providing the refractivity analysis, figure, and surface stationdata, John Braun for providing the GPS analysis and figure, Jeff Keelerfor his informative discussions of radar errors, and Wen‐Chau Lee,Tammy Weckwerth, Robert Rilling, Wiebke Deierling, and Matthias
Steiner for their critical reviews. Special thanks go to the NCAR/EarthObserving Laboratory (EOL) radar engineering and technical staff,Jonathan Emmitt, Al Phinney, Kyle Holden, Gordon Farquharson,and Frank Pratte; without their dedication and talents none of the dual‐wavelength radar data presented would have existed.
References
Beard, K. V., and C. Chuang (1987), A new model for the equi-librium shape of raindrops, J. Atmos. Sci., 44, 1509–1524.
Bevis, M., S. Businger, T. A. Herring, C. Rocken, R. A. Anthes,and R. H. Ware (1992), GPS meteorology: Remote sensing ofatmospheric water vapor using the Global Positioning System,J. Geophys. Res., 97(D14), 15,787–15,801.
Crook, N. A. (1996), Sensitivity of moist convection forced byboundary layer processes to low‐level thermodynamicfields, Mon. Weather Rev., 124, 1767–1785.
Doviak, R. J., and D. S. Zrnic (1993), Doppler Radar andWeather Observations, Academic, San Diego, Calif.
Fabry, F. (2004), Meteorological value of ground targetmeasurements by radar, J. Atmos. Oceanic Technol., 21,560–573.
Fabry, F. (2006), The spatial variability of moisture in theboundary layer and its effect on convection initiation:Project‐long characterization, Mon. Weather Rev., 134,79–91.
Fabry, F., C. Frush, I. Zawadzki, and A. Kilambi (1997), On theextraction of near‐surface index of refraction using radarphase measurements from ground targets, J. Atmos. OceanicTechnol., 14, 978–987.
Farquharson, G., F. Pratte, M. Pipersky, D. Ferraro, A. Phinney,E. Loew, R. A. Rilling, S. M. Ellis, and J. Vivekanandan(2005), NCAR S‐Pol second frequency (Ka‐band) radar,paper presented at 32nd Conference on Radar Meteorology,Am. Meteorol. Soc., Albuquerque, N. M.
Fox, N. I., and A. J. Illingworth (1997), The retrieval of strato-cumulus cloud properties by ground‐based cloud radar,J. Appl. Meteorol., 36, 485–492.
Hock, T. F., and J. L. Franklin (1999), The NCAR GPS drop-windsonde, Bull. Am. Meteorol. Soc., 80, 407–420.
Hogan, R. J., N. Gaussiat, and A. J. Illingworth (2005), Strato-cumulus liquid water content from dual‐wavelength radar,J. Atmos. Oceanic Technol., 22, 1207–1218.
Hogg, D. C., F. Guiraud, J. B. Snider, M. T. Decker, and E. R.Westwater (1983), A steerable dual‐channel microwaveradiometer for measurement of water vapor and liquid in tro-posphere, J. Clim. Appl. Meteorol., 22, 789–806.
Keeler, R. J., and S. M. Ellis (2000), Observational errorcovariance matrices for radar data assimilation, Phys. Chem.Earth B, 25, 1277–1280.
Keeler, R. J., and R. E. Passarelli (1990), Signal processing foratmospheric radars, in Radar in Meteorology, edited byD. Atlas, chap. 20, pp. 199–229, Am. Meteorol. Soc., Boston,Mass.
Keeler, R. J., J. Lutz, and J. Vivekanandan (2000), S‐Pol:NCAR’s polarimetric Doppler research radar, paper pre-
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
14 of 15

sented at International Geoscience and Remote SensingSymposium, Inst. of Electr. and Electron. Eng., Honolulu,Hawaii.
Knight, C. A., and L. Miller (1993), First radar echoes fromcumulus clouds, Bull. Am. Meteorol. Soc., 74, 179–188.
Knight, C. A., and L. J. Miller (1998), Early radar echoes fromsmall, warm cumulus: Bragg and hydrometeor scattering,J. Atmos. Sci., 55, 2974–2992.
Knight, C. A., W. D. Hall, and P. M. Roskowski (1983), Visualcloud histories related to first radar echo formation in north-east Colorado cumulus, J. Appl. Meteorol., 22, 1022–1040.
Laird, N. F., H. T. Ochs, R. M. Rauber, and L. J. Miller (2000),Initial precipitation formation in warm Florida cumulus,J. Atmos. Sci., 57, 3740–3751.
Lhermitte, R. (1987), A 94‐GHz Doppler radar for cloud obser-vations, J. Atmos. Oceanic Technol., 4, 36–48.
Liebe, H. J. (1985), An updated model for millimeter wavepropagation in moist air, Radio Sci., 20, 1069–1089.
Liou, K. N. (1992), Radiation and Cloud Processes in theAtmosphere, Oxford Univ. Press, New York.
Liu, H., and V. Chandrasekar (2000), Classification of hydro-meteors based on polarimetric radar measurements: Devel-opment of fuzzy logic and neuro‐fuzzy systems, and insitu verification, J. Atmos. Oceanic Technol., 17, 140–164.
MacDonald, A., Y. Xie, and R. Ware (2002), Diagnosis ofthree‐dimensional water vapor using slant observations froma GPS network, Mon. Weather Rev., 130, 386–397.
Meneghini, R., L. Liao, and L. Tian (2005), A feasibility studyfor simultaneous estimates of water vapor and precipitationparameters using a three‐frequency radar, J. Appl. Meteorol.,44, 1511–1525.
Padmanabhan, S., S. C. Reising, J. Vivekanandan, and F. Iturbide‐Sanchez (2009), Retrieval of atmospheric water vapor den-sity with fine spatial resolution using 3‐D tomographicinversion of microwave brightness temperatures measuredby a network of scanning compact radiometers, IEEE Trans.Geosci. Remote Sens., 47(11), doi:10.1109/TGRS.2009.2031107.
Prupacher, H. R., and J. D. Klett (1997), Microphysics ofClouds and Precipitation, Kluwer Acad., Dordrecht,Netherlands.
Rangno, A. L., and P. V. Hobbs (1994), Ice particle concentra-tions and precipitation development in small continentalcumuliform clouds, Q. J. R. Meteorol. Soc., 120, 573–601.
Rauber, R. M., et al. (2007), Rain in shallow cumulus over theocean: The RICO campaign, Bull. Am. Meteorol. Soc., 88,1912–1928.
Rinehart, R. E. (2004), Radar for Meteorologists, 4th ed.,Rinehart, Columbia, Mo.
Roberts, R. D., et al. (2008), REFRACTT 2006, Bull. Am.Meteorol. Soc., 89, 1535–1548.
Rocken, C., T. V. Hove, J. Johnson, F. Solheim, R. Ware,M. Bevis, S. Chiswell, and S. Businger (1995), GPS/STORM—GPS sensing of atmospheric water vapor for mete-orology, J. Atmos. Oceanic Technol., 12, 468–478.
Sauvageot, H., and J. Omar (1987), Radar reflectivity of cumu-lus clouds, J. Atmos. Oceanic Technol., 4, 264–272.
Stephens, G. L. (1994), Remote Sensing of the Lower Atmo-sphere: An Introduction, Oxford Univ. Press, New York.
Van Baelen, J., J. Aubagnac, and A. Dabas (2005), Comparisonof near‐real time estimates of integrated water vapor derivedwith GPS, radiosondes, and microwave radiometer,J. Atmos. Oceanic Technol., 22, 201–210.
Vivekanandan, J., S.M. Ellis, R. Oye, D. S. Zrnic, A. V. Ryzhkov,and J. Straka (1999), Cloud microphysics retrieval usingS‐band dual‐polarization radar measurements, Bull. Am.Meteorol. Soc., 80, 381–388.
Vivekanandan, J., G. Zhang, and M. K. Politovich (2001), Anassessment of droplet size and liquid water content derivedfrom dual‐wavelength radar measurements to the applicationof aircraft icing detection, J. Atmos. Oceanic Technol., 18,1787–1798.
Vivekanandan, J., G. Zhang, and E. Brandes (2004), Polarimet-ric radar estimators based on a constrained gamma drop sizedistribution model, J. Appl. Meteorol., 43, 217–230.
Wang, J., and B. Geerts (2003), Identifying drizzle withinmarine stratus with W‐band radar reflectivity, Atmos. Res.,69, 1–27.
Ware, R. H., D. W. Fulker, S. A. Stein, D. N. Anderson, S. K.Avery, R. D. Clark, K. K. Droegemeier, J. P. Kuettner, J. B.Minster, and S. Sorooshian (2000), SuomiNet: A real‐timenational GPS network for atmospheric research and educa-tion, Bull. Am. Meteorol. Soc., 81, 677–694.
Ware, R., R. Carpenter, J. Guldner, J. L. Iljegren, T. Nehrkorn,F. Solheim, and F. Vandenberghe (2003), A multi‐channelradiometric profiler of temperature, humidity, and cloud liquid,Radio Sci., 38(4), 8079, doi:10.1029/2002RS002856.
Weckwerth, T. M., V. Wulfmeyer, R. M. Wakimoto, R. M.Hardesty, J. W. Wilson, and R. M. Banta (1999), NCAR‐NOAA Lower‐Tropospheric Water Vapor Workshop, Bull.Am. Meteorol. Soc., 80, 2339–2357.
Weckwerth, T. M., C. R. Pettet, F. Fabry, S. Park, M. A.LeMone, and J. W. Wilson (2005), Radar refractivityretrieval: Validation and application to short‐term forecast-ing, J. Appl. Meteorol., 44, 285–300.
Williams, J. K., and J. Vivekanandan (2007), Sources of errorin dual‐wavelength radar remote sensing of cloud liquidwater content, J. Atmos. Oceanic Technol., 24, 1317–1336.
Wilson, J. W., T. M. Weckwerth, J. Vivekanandan, R. M.Wakimoto, and R. W. Russell (1994), Boundary layerclear‐air radar echoes: Origin of echoes and accuracy ofderived winds, J. Atmos. Oceanic Technol., 11, 1184–1206.
Zrnic, D. S., and A. V. Ryzhkov (1998), Observations ofinsects and birds with a polarimetric radar, IEEE Trans.Geosci. Remote Sens., 36(2), 661–668.
S. M. Ellis and J. Vivekanandan, National Center forAtmospheric Research, PO Box 3000, Boulder, CO 80307‐3000, USA. ([email protected])
ELLIS AND VIVEKANANDAN: WATER VAPOR ESTIMATES RS5002RS5002
15 of 15