Embed Size (px)
Citation preview

WALL SLIP AND BOUNDARY EFFECTS IN
POLYMER SHEAR FLOWS
By
William Brian Black
A dissertation submitted in partial fulfillment
of the requirements for the degree of
Doctor of Philosophy
(Chemical Engineering)
at the
UNIVERSITY OF WISCONSIN – MADISON
2000

i
Abstract
Polymer – surface interactions strongly influence many important industrial and
rheological flows. In particular, polymer melts and solutions slip against the sur-
face; this has long been associated with sharkskin and spurt in extrusion, and
recent experimental observations suggest that slip also plays a role in the formation
of enhanced concentration fluctuations in entangled polymer solutions. Analyses
of melt flow in model geometries, incorporating simple slip models which include
the effects of chain orientation and stretching, and employing common linear and
nonlinear viscoelastic models for the polymer stress, demonstrate that slip can lead
to short-wave hydrodynamic instabilities. The results predict values of the critical
recoverable shear, the critical shear rate, and the frequency of distortion that are
consistent with experimental observations for sharkskin during extrusion of linear
polyethylenes. Further analysis, employing slip models generalized to include the
effects of normal load (i.e. pressure) at the surface, confirms and unifies previ-
ous theoretical work: shear stress dependent slip models cannot predict instabilities
consistent with sharkskin; and pressure dependent slip leads to instability due to ill-
posedness at the boundary. Computational studies performed for polymer solutions
highlight the importance of boundaries on the flow behavior. Computations were

ii
carried out using a two-fluid model in which stress and concentration are coupled.
This coupling gives rise to enhanced fluctuations in the bulk, and the additional
coupling with slip leads to hydrodynamic instability. The length scales for slip
(the extrapolation length) and instability (the reciprocal of the wavenumber for the
disturbance) are the same and are consistent with experiment. Incorporation of
thermal fluctuations shows that the fluctuations near the surface are dramatically
enhanced relative to those in the bulk. The wavevector for enhanced fluctuations
rotates as the shear rate increases, in agreement with bulk experiments and predic-
tions, so that the mechanism for near-surface enhancement is essentially the same
as in the bulk. As opposed to the flow instability, these enhanced fluctuations are
insensitive to the presence of slip. Overall, these analyses highlight the importance
of bounding surfaces on the macroscopic flow behavior and of coupling between
various flow features, such as stress, concentration, and slip.

iii
Acknowledgements
I would like to extend my thanks and appreciation to those who have helped make
this possible: my wife, Lisa; my advisor, Prof. Michael Graham; and my group
mates: Dr. Gretchen Baier, Arun Kumar, Dr. Venkat Ramanan, Dr. John Kasab,
Philip Stone, and Richard Jendrejack, whose help and advice have been most ben-
eficial.

iv
Contents
Abstract i
Acknowledgements iii
List of Tables vii
List of Figures viii
Summary xi
1 Extrusion Instabilities 1
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Sharkskin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Wall Slip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3.1 Experimental Evidence . . . . . . . . . . . . . . . . . . . . . . 9
1.3.2 Plane Shear Flow Analyses with Slip . . . . . . . . . . . . . . 13
2 Modeling of Wall Slip 18
2.1 Slip Mechanisms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2 Connections Between Normal Stresses and Slip . . . . . . . . . . . . . 21

v
2.3 A Slip Model Based on Network Theory . . . . . . . . . . . . . . . . . 24
2.4 Anisotropic Drag Slip Model . . . . . . . . . . . . . . . . . . . . . . . 27
3 Stability of Plane Shear Flow of a Polymer Melt with Slip 30
3.1 Relevance of Viscometric Flow to Die Exit Flow . . . . . . . . . . . . 30
3.2 Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.3 Asymptotic Solutions with General Slip Models . . . . . . . . . . . . . 36
3.4 Results with Specific Slip Models . . . . . . . . . . . . . . . . . . . . 44
3.4.1 Analytical Results for the UCM Equation . . . . . . . . . . . . 44
3.4.2 Numerical Method . . . . . . . . . . . . . . . . . . . . . . . . 47
3.4.3 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . 51
3.4.4 Comparison with experiment . . . . . . . . . . . . . . . . . . . 57
3.5 Mechanism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.6 Summary of the Melt Analysis . . . . . . . . . . . . . . . . . . . . . . 63
4 Concentration Fluctuations in Semidilute Polymer Solutions 65
5 Concentration Fluctuations and Flow Instabilities in Sheared Polymer
Solutions 73
5.1 Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.2 Stability Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.2.1 Numerical Method . . . . . . . . . . . . . . . . . . . . . . . . 78
5.2.2 Stability Results . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.3 Brownian Fluctuations . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94

vi
6 Concluding Remarks 99
Nomenclature 101
A Basic Melt Equations 105
A.1 Nondimensionalization . . . . . . . . . . . . . . . . . . . . . . . . . . 105
A.2 Derivation of the General Stability Equation . . . . . . . . . . . . . . 107
A.3 PTT Matrix Eigenvalue Problem . . . . . . . . . . . . . . . . . . . . 110
B 3D Stability Operators 112
Bibliography 114

vii
List of Tables
1 Summary of experimental results for sharkskin . . . . . . . . . . . . 4
2 Summary of measurements of slip velocities. . . . . . . . . . . . . . 10
3 Summary of stability analyses of flow . . . . . . . . . . . . . . . . . 15
4 Comparison of the results for slip and no-slip. . . . . . . . . . . . . 61

viii
List of Figures
1 Extrusion instabilities. . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Flow curve for LLDPE. . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Critical stresses for LLDPE for dies constructed of different metals. 6
4 Effect of DFL coating on the flow curve of HDPE. . . . . . . . . . . 11
5 Effect of Dynamar coating on the flow curve of HDPE. . . . . . . . 12
6 Schematic of the two principal mechanisms for slip. . . . . . . . . . 19
7 Kinetic slip model. . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
8 Typical die exit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
9 Stress boundary layers in corner flows. . . . . . . . . . . . . . . . . 31
10 Basic parallel shear flow geometry with slip at the solid surfaces. . . 33
11 Snapshot of the destabilizing disturbance at the onset of instability 41
12 Stability diagram for pressure- and normal stress- dependent slip. . 42
13 Critical Weissenberg number as a function of s for several values of
Wes for the network slip model. . . . . . . . . . . . . . . . . . . . . 45
14 Critical Wen as a function of εs for the UCM equation and the network
slip model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45

ix
15 Growth rate versus wavenumber for the UCM equation and the N
slip model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
16 Typical eigenvalue spectra obtained analytically and numerically. . 47
17 Semi-analytical neutral curves for the plane Couette flow of the UCM
fluid with the anisotropic drag slip model. . . . . . . . . . . . . . . 48
18 Comparison of the growth rate curves predicted numerically and an-
alytically for the UCM equation and the network slip model. . . . . 52
19 Numerical and analytical neutral curves for the UCM equation and
the network slip model . . . . . . . . . . . . . . . . . . . . . . . . . 53
20 Neutral curves for the PTT constitutive equation with the network
model as the slip relation. . . . . . . . . . . . . . . . . . . . . . . . 53
21 Numerical neutral curves for the PTT constitutive equation with the
anisotropic drag slip model. . . . . . . . . . . . . . . . . . . . . . . 54
22 Master curve of kxb versus Wet for the network model. . . . . . . . . 55
23 Phase shift between the slip velocity and the shear and normal stress
components at the critical point. . . . . . . . . . . . . . . . . . . . 62
24 Enhanced concentration fluctuations in a semidilute polystyrene so-
lution. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
25 Schematic of typical light scattering experiments. . . . . . . . . . . 67
26 Scattering intensity as a function of shear rate. . . . . . . . . . . . . 67
27 Scattering pattern as a function of the shear rate. . . . . . . . . . . 68
28 Physical picture of the HF hydrodynamic mechanism for enhanced
concentration fluctuations. . . . . . . . . . . . . . . . . . . . . . . . 70

x
29 Plane Couette geometry showing slip between the solution and solid
surface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
30 Eigenvalue spectrum for 2D disturbances with the stress diffusion
term dropped. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
31 Comparison of the standard and SID techniques. . . . . . . . . . . . 85
32 A typical eigenvalue obtained using the SID technique. . . . . . . . 87
33 Neutral curves for kz = 0 and S = 10−2 for various values of b. . . . 88
34 Neutral curves for three dimensional disturbances at the given values
of kx and b. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
35 Unstable eigenfunction for the concentration. The parameters are
kx = 0.4, b = 10, We = 10, S = 0.01, N = 96. . . . . . . . . . . . . . 90
36 The noise correlation function. . . . . . . . . . . . . . . . . . . . . . 92
37 Correlation function at equilibrium. . . . . . . . . . . . . . . . . . . 92
38 Series of concentration correlation functions for increasing We. . . . 96
39 Series of snapshots of typical concentration profiles as We is increased. 97
40 Eigenvalue spectra for the slip and no-slip cases in the bounded flow
domain. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98

xi
Summary
Polymer extrusion processes are severely limited by flow instabilities and product
distortions. The first flow instability observed upon increasing the flow rate from
zero during the extrusion of high molecular weight, linear polymers, such as high
density polyethylene (HDPE) and linear low density polyethylene (LLDPE) is shark-
skin, which is manifested as a short wavelength, periodic distortion of the surface of
the product. This happens at very low Reynolds numbers, due to the large viscosity
of polymer melts, and at flow rates where the shear stress is a monotonic function
of the shear rate. The onset conditions are affected by the die material, indicating
that the instability is interfacial in origin. In addition, the instability is triggered in
the die exit region, where the stresses are largest due to the boundary singularity
and velocity profile rearrangement. As sharkskin is the first instability seen in the
processing of these materials, understanding this phenomenon is key to improving
the productivity of these processes.
There have been many theories put forth to explain the onset of sharkskin distor-
tion, but, clearly, wall slip influences the critical conditions for instability to occur.
Two possible mechanisms for slip exist, desorption of adsorbed molecules from the
surface and disentanglement of anchored chains from the bulk material. In the past,

xii
slip has been modeled macroscopically using slip relations where the slip velocity is
a function of the shear stress at the wall. However, analyses employing these types
of models do not reveal any hydrodynamic instabilities which are consistent with
these distortions, raising the question of whether slip has been modeled correctly.
Physically, the tension in the chains at the surface, or equivalently, the chain ex-
tension at the wall, should influence both possible mechanisms for slip and should
be included in the slip model. This implies that the slip velocity is a function of
the normal stresses, a fact included in few slip models to date. As the die exit is
a region of extensional flow and large normal stresses, due to velocity profile rear-
rangement, these types of models may be particularly relevant for predicting and
modeling sharkskin behavior.
Normal stress-dependent slip models arise generally from simple mesoscopic and
microscopic treatments of polymer-surface interaction. From a mesoscopic point
of view, the interactions between the wall and the polymer can be modeled as
network junction points, giving a slip velocity dependent on the number of network
strands connected to the surface. Successful network theories for bulk constitutive
behavior assume that the lifetime of strands depends upon the extension of the
strands, typically measured by the trace of the extra stress tensor. Application
of this assumption to the surface-tethered strands yields a simple, normal stress-
dependent slip model. Microscopic theories for polymer chains interacting with
solid surfaces also lead to normal stress dependent slip models. Coarse-grained
bead-spring theories begin with a force balance on the beads which expresses the
equality between the drag force on the beads due to flow and the restoring force
due to the springs. Generally, the drag is assumed isotropic, but in reality, the

xiii
drag is highly anisotropic because the chains are distorted and oriented by flow.
Inclusion of anisotropic drag leads directly to a normal stress-dependent slip model.
These models, while simple in formulation, underscore the generality of normal
stress- dependent slip models and the simplicity of incorporating the effects of chain
orientation and stretching into current methodologies for modeling slip.
The slip models mentioned above can be generalized to include pressure effects
and analyzed formally in planar shear flows when the bulk behavior is described by
the upper convected Maxwell (UCM) constitutive equation. The flow is unstable
to short wavelength (i.e. large wavenumber) disturbances at large Weissenberg
numbers. The perturbations are localized near the surfaces and are convected along
the channel at the steady state slip velocity. Growth rates are bounded for all
wavenumbers, so that the model is well-posed, if the slip model does not include
pressure effects. The model becomes ill-posed if pressure effects are considered,
leading to unbounded growth rates for large wavenumbers, consistent with previous
analytical work by other authors. The flow is unconditionally stable if the normal
stress and pressure dependencies are removed so that the slip velocity only depends
on the shear stress.
Examination of the network and anisotropic drag models mentioned above in
plane Couette flow for general wavenumbers reveals several other interesting facets
of the instability. Stability results for both linear (UCM) and nonlinear (Phan-
Thien – Tanner) viscoelastic constitutive equations collapse to one master curve
relating the critical recoverable shear, defined as the critical shear stress divided
by the shear modulus, to the disturbance wavenumber. The critical recoverable
shear is O(10), which is the same order of magnitude measured experimentally.

xiv
The frequency of distortion scales with the bulk polymer relaxation time, a finding
corroborated by several experiments and once argued to conclusively prove that the
mechanism for slip was disentanglement. These results suggest, however, that this
scaling is common to both mechanisms for slip and the processes of reentanglement
and readsorption are both dominated by polymer relaxation. Scaling comparisons
with experiment demonstrate that the predicted temperature and molecular weight
dependence are in agreement with experimental results for LLDPE and HDPE.
These results are encouraging, and suggest that normal stresses play an important
role in sharkskin formation.
Flow instabilities due to surface interactions may also be present in the flow of
entangled polymer solutions as enhanced concentration fluctuations. Experiments
have only recently demonstrated the interfacial nature of this phenomenon – fluctu-
ations were visually observed to initiate near the surfaces and chemically modifying
the surfaces to increase slip delayed the onset of enhancement. Prior to this ex-
periment, all explanations for shear enhanced concentration fluctuations focused
on the coupling between polymer stress and concentration in the bulk of the solu-
tion. Analyses of polymer solution models which employ these ideas show that the
diffusion of random fluctuations is retarded in certain directions giving rise to en-
hanced fluctuations in those directions. These theories are successful in describing
low shear rate behavior in scattering experiments which examine the bulk region,
but are unable to describe the critical shear rates observed in experiments which
sample the near-surface regions.
Stability analysis using a Navier slip boundary condition has revealed that slip
can couple to the stress and concentration, giving rise to flow instability. The

xv
instability is localized near the bounding surfaces and has length scales consistent
with the experimentally observed values. The characteristic length scale is√Dtrλ,
where Dtr is the translational diffusivity of the polymer chain and λ is the relaxation
time, and represents a crossover size from short wavelength fluctuations whose decay
is dominated by diffusion to longer wavelength fluctuations whose decay is influenced
by polymer chain relaxation. For low values of the wavenumber, increasing slip
results in flow stabilization, in agreement with experiment. The orientation of the
destabilizing perturbation is similar to the enhanced random fluctuations that arise
in the bulk as mentioned above, and therefore, the mechanism of instability is clearly
related to the bulk mechanism of enhancement.
Surfaces can enhance fluctuations even when the basic flow is stable. Time in-
tegration of the linearized equations with random forcing revealed the formation of
boundary layers in the polymer concentration profile, even though fluctuations were
imposed uniformly throughout the domain. These boundary layers form on length
scales similar to those in experiments, and are most easily quantified in terms of the
spatial correlation function for the concentration, which is related to the structure
factor and, therefore, contains scattering information. Examination of the correla-
tion functions suggests that random fluctuations are selectively, and dramatically,
enhanced near the surface, even at equilibrium. The scattering intensity near the
surface increases as the shear rate increases. The enhanced fluctuations have a pre-
ferred orientation at low shear rates and appear to rotate clockwise as the shear rate
increases. This prediction is similar to those made for bulk behavior and observed
experimentally in the bulk region. The preferred orientations are confirmed by plot-
ting representative concentration profiles. Interestingly, the enhancement of random

xvi
fluctuations is insensitive to the presence of slip – neither the magnitude nor the
orientation appears to be affected – so that any complete explanation of enhanced
concentration fluctuations must include boundary effects. Overall, these analyses
point out the importance of polymer – surface interactions in understanding the
macroscopic flow behavior of polymer melts and solutions.

1
Chapter 1
Extrusion Instabilities
1.1 Introduction
Flow instabilities and product distortions limit the productivity of many polymer
processing applications, such as extrusion, film blowing, and fiber spinning. The
product becomes deformed upon passing a critical flow rate, thereby hampering its
usefulness and/or marketability. Hence, both industry and academia have expended
a great deal of effort attempting to understand the root causes of these instabilities.
Still, no general consensus has been reached on explanations for many of them.
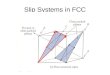
The general sequence of instabilities for high molecular weight, linear polymers
in extrusion is outlined below. For these polymers, sharkskin is the first distortion
typically seen and a picture of this phenomenon for a high density polyethylene
(HDPE) is shown in Fig. 1(a). It is a short wavelength, wavy distortion confined
to the outside edge of the extrudate. The depth of severe sharkskin is at most
about 10% of the thickness of the product. Increasing the flow rate further results

2
(a)
(b)
(c)
Figure 1: General sequence of extrusion instabilities for linear polymers.From Polymer Processing, Principles and Modeling by Agassant, Avenas, Sergent, and Carreau [2]
in more severe distortion, either stick-slip or bamboo melt fracture, depending on
the experimental setup. Bamboo melt fracture, Fig. 1(b), has alternating regions of
smooth, non-distorted extrudate followed by regions with distortions that resemble
sharkskin, and arises if the volumetric flow rate, or shear rate, is the flow variable
controlled. If, instead, the pressure drop, and hence, the shear stress is controlled,
there is a dramatic increase of the flow rate at a critical shear stress. At higher
shear rates the extrudate becomes grossly distorted, as shown in Fig. 1(c). This is a
large wavelength, large amplitude distortion, and the entire extrudate cross section

3
is deformed. However, the surface is smooth and sharkskin free. Further increases
in shear rate result in more severe gross fracture.
This sequence of instabilities is not unique. Highly branched systems, such as
polystyrene (PS), polypropylene (PP), and low density polyethylene (LDPE) do
not exhibit the sharkskin instability at all. Instead a spiral or corkscrew instability
sets in after a critical flow rate. There is a second critical flow rate after which the
extrudate becomes grossly distorted.
Numerous attempts have been made, both theoretically and experimentally, to
understand these instabilities, generally with mixed results. This body of work is
reviewed below with emphasis on sharkskin. As this is typically the first instability
seen in extrusion operations, an understanding of this phenomenon is crucial for
improving polymer extrusion processes.
1.2 Sharkskin
A partial listing of experimental work on sharkskin is shown in Table 1. By far the
most extensive body of work exists for linear low-density polyethylene (LLDPE)
resins, but other resins, such as high density polyethylene (HDPE), polybutadi-
ene (PB), polydimethylsiloxane (PDMS), and poly(methylmethacrylate) (PMMA)
exhibit sharkskin distortions as well. Sharkskin is first observed as a loss of
gloss of the extrudate surface above a critical shear stress or shear rate. the dis-
tortions become more pronounced as the flow rate is increased, until the surface is
clearly distorted and wavy. The loss of gloss can usually be associated with a slope
change on a plot of the apparent shear stress, τa, versus the apparent shear rate,

4
Author(s) Polymer Die Proposed Mechanism
Tordella [94] PMMA Capillary
Sieglaff [89] PVC Capillary Cohesive failure
Ajji et al. [4] LLDPE Capillary Sporadic loss of adhesionPiau et al. [71] LLDPE Capillary Entrance instabilities
HDPE Capillary ”Kurtz [47, 49] LLDPE Capillary Pre-stressing and critical exit velocityRamamurthy [75] LLDPE Capillary Slip in the die land
HDPE Capillary ”HDPE-LDPE Capillary ”
Kalika and Denn [42] LLDPE Capillary Wall slipLim and Schowalter [52] PB SlitMoynihan et al. [64] LLDPE Capillary Pre-stressing and critical exit velocity
LLDPE Slit ”Piau et al. [72] PDMS Orifice High stresses at the die exitWang et al. [100] LLDPE Capillary Coil-stretch transition at the exitEl Kissi et al. [45] PDMS Capillary Rupture at the die exit
PB Capillary ”LLDPE Capillary ”HDPE Capillary ”
Venet and Vergnes [96] LLDPE CapillaryPerson and Denn [67] LLDPE Capillary Die land slipGhanta et al. [26] LLDPE CapillaryBarone and Wang [7] PB Slit Coil-stretch transition at the die exit
Table 1: Summary of experimental results for melt fracture and sharkskin.1S - sharkskin; MF - melt fracture.

5
γa [75, 42, 47, 100] for polyethylenes. For other polymers, notably PVC [89], this is
not always the case. Fig. 2 shows Ramamurthy’s flow curve for a LLDPE resin and
Figure 2: Flow curve for LLDPE.From Ramamurthy [75]
the point marked OSMF indicates the critical shear stress for the onset of sharkskin
behavior. Below this critical shear stress the extrudate is smooth. At this point,
the flow curve is still monotonically increasing, and the flow curve does not flatten
out until much larger shear rates and stresses are obtained. It should also be noted
that this phenomenon occurs at very small Reynolds numbers, due to the very high
viscosities of the polymer resins.
One of the most striking and suggestive features of sharkskin is the importance
of the polymer melt/die wall interface. Ramamurthy [75] was the first to show
that the material of construction of the die wall affected the onset of sharkskin.
He constructed dies out of many different metals, including steels, brasses, copper,
and chromium, and then extruded LLDPE through these dies. Fig. 3 shows Rama-
murthy’s results for a 1 MI LLDPE resin. The important quantity is τc1, which is

6
the critical shear stress for the onset of sharkskin. This quantity varies from metal
to metal, from a low of 0.104 MPa for beryllium copper, to a high of 0.172 MPa for
Figure 3: Critical stresses for LLDPE for dies constructed of different metals.From Ramamurthy [75]
CDA 360 brass. Ramamurthy also found that the die composition had a profound
effect in film blowing operations, where the use of brass dies entirely removed shark-
skin, which appeared during film blowing with steel dies. This inconsistency was the
subject of recent work on extrusion through brass dies by Person and Denn [67] and
Ghanta et al. [26], which shows clearly the importance of surface preparation with
brass dies, particularly the removal of the oxide layer which forms at the surface
of the die. Removal of this layer in situ using an additive resulted in suppression
of sharkskin distortions. Low surface energy surfaces have been studied by Piau et
al. [71] for LLDPE and HDPE. Dies made from poly(tetrafluoroethylene) (PTFE)
were found to greatly increase the flow rates possible before sharkskin began over
those in dies made of stainless steel.
Placing coatings on the die surface affects the appearance of melt fracture.
Moynihan et al. [64] performed experiments where LLDPE was extruded through

7
a slit die which could be selectively coated with fluoropolymer in the entrance and
exit regions. When the die was uncoated, sharkskin was evident at an apparent
shear rate of 27 s−1. Coating the entrance region or the exit region suppressed
sharkskin up to the maximum flow rate they could obtain; coating both was not
required to suppress the instability. However, the coating at the entrance of the die
may have detached and been transported to the end of the die. Such a mechanism
was suggested by the authors and also reported by Wang et al. [100] in their ex-
periments, in which they reported similar stabilizing effects when their dies were
coated with a fluoropolymer known to discourage surface interactions.
Peeling experiments have also demonstrated the importance of surface interac-
tions. Hill, Hasegawa, and Denn [38] performed peeling tests for solid LLDPE from
a variety of metal surfaces. They measured the propagation speed for the crack as
a function of the force used to peel the sample. In addition to finding differences
in the forces and velocities for various surfaces, they also found that the forces and
velocities changed with aging time. From these results, and some theoretical anal-
ysis, they were able to estimate the critical stress for the onset of sharkskin. These
values compare favorably to those found by Ramamurthy [75] for the same metals.
Other processing conditions, such as the temperature and pressure, as well as
the molecular weight (MW) affect the onset and severity of sharkskin deformations.
During sharkskin, the pressure in the die and the reservoir remains relatively con-
stant, unlike the situation for bamboo distortion, during which both the pressure
and the mass flow rate oscillate. Increasing the L/D ratio of the die decreases the
severity of sharkskin [95, 34] as well as increases the critical shear stress necessary

8
for the instability [42]. Kurtz [47, 49] reported that increased processing temper-
ature had little effect on the critical shear stresses for sharkskin for his LLDPE
samples. Of course, a higher shear rate was necessary to obtain the critical shear
stress at higher temperatures due to lower melt viscosities. Venet and Vergnes [96]
also reported an increase in the critical shear rate with increasing temperature, but
did not report critical shear stresses. Kurtz [48] showed that increasing the molec-
ular weight increases the amplitude of sharkskin and lowers the frequency of the
distortion in LLDPE. There is also evidence that the molecular weight distribution
may have an influence on the flow phenomenon. Ajji et al. [4] partially fractionated
their LLDPE samples to remove the lowest molecular weight components. This
fractionation increased the critical shear rates for instability without significantly
increasing the number or weight average molecular weights. It is unclear whether
the viscosity was affected, precluding statements about the critical stresses for the
instability.
A few general conclusions can be drawn from the experimental evidence. Shark-
skin is a short wavelength, wavy distortion confined to the surface of the extrudate
and observed at low Reynolds numbers. This instability occurs on the increasing
portion of the flow curve, always before the flattening of the flow curve associated
with bamboo, or spurt, distortions. Most importantly, sharkskin is clearly influ-
enced by the interfacial interactions between the polymer melt and the die wall, as
adhesion promoters and coatings which reduce the polymer/die interactions have
been shown to suppress the onset of the instability. In addition, experiments have
clearly established that the surface interactions which lead to sharkskin take place
primarily near the die exit. This is not surprising since the highest stresses, both

9
shear and normal, are at the exit and the flow possesses a strong elongational com-
ponent there. There are few explanations that can account for these observations,
and these generally invoke the notion of wall slip.
1.3 Wall Slip
1.3.1 Experimental Evidence
Wall slip is one of the few explanations for sharkskin that truly depends upon the
interfacial conditions in the die. The idea was proposed as far back as 1931 by
Mooney [62], who also devised a way of calculating slip velocities from capillary
experiments using different sized dies. The critical shear stress for the onset of
sharkskin has generally been observed to coincide with or occur at a slightly higher
shear stress [75, 95] than the critical shear stress for the onset of slip. Mackay
and Henson [53] argued that the critical shear stress for slip is an experimental
artifact because capillary measurements are not sensitive enough to measure slip at
lower stress levels. There have also been arguments that the slip only takes place
at the die exit [47, 49]. Either way, slip relieves some of the shear stress in the
polymer, resulting in what appears as a lower viscosity. Therefore, slip would show
up as increased shear thinning of the sample, resulting in a slope change in the flow
curve. Other explanations, such as cavitation, rupture at the die exit, constitutive
instabilities, and apparent slip generally do not depend upon the interface conditions
and cannot describe sharkskin.
Slip measurement has typically fallen into two broad categories, flow visualiza-
tion and indirect measurement. Table 2 summarizes the experiments which have

10
Author(s) Polymer Apparatus Technique
Atwood and Schowalter [6] HDPE Slit die Hot film anemometry
Lim and Schowalter [52] PB Slit die Hot film anemometry
White et. al. [102] PBR Biconical rheometer
Hatzikiriakos and Dealy [33] HDPE Sliding plate rheometer Mooney analysis
Hatzikiriakos and Dealy [34] HDPE Capillary rheometer Modified Mooney anal-
ysis
Migler, et al. [58] PDMS Simple Shear Evanescent waves
Archer et al. [5] PS Simple Shear Visualization of im-mersed spheres
Wang et al. [100] LLDPE Capillary rheometer Moody analysis
Person and Denn [67] LLDPE Slit die Moody analysis
Table 2: Summary of measurements of slip velocities.
been performed in both areas. These techniques have a variety of limitations
and problems. The traditional Mooney technique fails for capillary dies if either
the viscosity or the slip velocity depends upon the pressure or if there are signifi-
cant temperature gradients. Hatzikiriakos and Dealy [34] have proposed a modified
technique that corrects for the pressure effects. Immersed sphere visualization [5],
while being able to measure slip velocities within microns of the plate surface, is
limited by the requirement of a transparent flow cell as well as the distortion to the
flow field from the finite sized spheres. Evanescent wave techniques [58] also require
a transparent flow cell, however, the technique is non-invasive and slip velocities
can be measured as close as 100 nm from the plate surface. Hot film anemometry
has the distinct advantage of being a real time measuring system for slip, as well as
being non-invasive and not requiring any special properties of the flow cell and fluid.
The probes themselves are usually brittle and have a difficult time withstanding the

11
high stresses at the wall, and the technique also requires complicated data reduc-
tion to back out the slip velocities, as they are not measured directly. Other flow
visualization techniques, such as NMR and X-ray visualization and laser-Doppler
velocimetry (which are not listed in the table) are still quite limited by poor reso-
lution near the wall and are not yet viable for measuring slip velocities.
Several experiments clearly show that the slip velocity and the critical shear
stress for slip depend upon the polymer/die wall interface. Hatzikiriakos and Dealy
[33] have shown that fluorocarbon coatings can both suppress and promote slip in
their sliding plate rheometer. Fig. 4, taken from their paper, shows that the fluo-
Figure 4: Effect of DFL coating on the flow curve of HDPE.
rocarbon coating Dry Film Lube (DFL) reduces the slip velocity without affecting
the critical stress for the onset of slip, while a different fluorocarbon, Dynamar,
illustrated in Fig. 5 promotes slip by reducing the critical shear stress necessary for
slip. Both have been used industrially to suppress sharkskin distortion. White et al.

12
Figure 5: Effect of Dynamar coating on the flow curve of HDPE.
[102] measured slip velocities is a biconical rheometer in which rotors constructed
of different metals were inserted. They found that slip velocities were smaller for
rotors constructed of copper or brass than for steel rotors. Rotors coated with
poly(tetrafluoroethylene) exhibited the highest slip velocities. This ordering is con-
sistent with the observations of Ramamurthy [75]. Ramamurthy [76] argued that
increased adhesion was responsible for the removal of sharkskin in film blowing
when brass dies were used. The observation by Halley and Mackay [30] that the
exit pressure is higher for flow through brass dies than for flow through steel dies is
consistent with the idea that the slip velocity is lower on brass that steel. Halley and
Mackay analyzed the die surface after extrusion and reported dezincification of the
brass and the formation of a pitted, porous surface. This surface roughness would
be expected to hinder slip at the surface [84]. However, Ghanta et al. [26] found
that, with careful preparation of the brass surface, LLDPE actually slips more on

13
brass than on steel and that sharkskin is entirely eliminated. More work is required
to reconcile these experiments.
Several experiments have been done to determine the slip behavior as a function
of the pressure. These experiments generally agree and demonstrate that the slip
velocity decreases as the pressure increases. White et al. [102] performed experi-
ments in a biconical rheometer in which the ambient pressure could be arbitrarily
set. They found that decreasing the pressure caused an increase in the slip velocity
and that at high pressures slip was negligible. They tested a variety of elastomeric
compounds with different coatings and metals for the rotors in the rheometer and
found the same general trends. This is the same general trend as the sharkskin
dependence on pressure.
To summarize, experiments strongly suggest wall slip as a participant in the
sharkskin phenomenon. Slip has been shown to exist, and it occurs at the same
or slightly lower critical stress as does sharkskin. Slip clearly depends on the die
wall/polymer melt interface and has temperature and pressure behavior similar to
sharkskin. It should be possible to take the microscopic mechanisms of slip and
develop macroscopic models which can be used to simulate die flow and analyzed to
determine stability. Until recently, such formalisms have been lacking, but ad hoc
slip models have been proposed and analyzed. The predictions of these models are
described below.
1.3.2 Plane Shear Flow Analyses with Slip
Most of the theoretical evidence is of the negative variety, as very few analyses have
actually demonstrated any hydrodynamic instability which could lead to sharkskin

14
and melt fracture. Attempts have been made with various constitutive equations,
a variety of boundary conditions, and even compressibility, but direct theoretical
evidence of sharkskin is lacking.
Although the study of slip boundary conditions was motivated here by the ob-
servation that slip may be important in sharkskin formation, initial work was moti-
vated by the lack of hydrodynamic instabilities for low Reynolds number flow with
no-slip boundaries. These analyses are summarized in Table 3. The first results
of note are those of Gorodtsov and Leonov [27], who studied the plane Couette flow
of an upper convected Maxwell fluid using a linear stability analysis with no-slip
boundary conditions. They found analytically that the flow is always linearly stable
in the absence of inertia (Re = 0). This result was corroborated by Renardy and
Renardy [82], who also showed that the flow was stable when the Reynolds number
was small. The flow only becomes unstable at large Re, which is unrealistic for
polymer extrusion operations. This result is further supported by the work of Lee
and Finlayson [50]. Several authors have also studied pressure driven flow between
parallel plates, as opposed to the plate driven flow above. Plane Poiseuille flow was
first studied by Porteous and Denn [74] for an upper convected Maxwell fluid and no-
slip boundary conditions. They found that at low Reynolds numbers the flow could
become unstable. However, their analysis failed to account for the existence of spu-
rious eigenvalues, an oversight later corrected by Ho and Denn [40]. These authors
showed that plane Poiseuille flow was stable at zero and low Reynolds numbers and
the flow became unstable only at large Reynolds numbers. Lee and Finlayson [50]
later confirmed this result using a different numerical technique. Finally, Lim and
Schowalter [51] have shown that the plane Poiseuille flow of a Giesekus liquid is also

15
Auth
or(s)
Model
Geo
metry
A/C
B.C
.Result
Goro
dtsov
andLeo
nov
[27]
UCM
PlaneCouette
ANo-slip
Sta
bilitywhenRe=
0.
TlapaandBernstein[93]
UCM
PlanePoiseu
ille
CNo-slip
Instabilityatlarg
eRe.
Hoand
Den
n[40]
UCM
PlanePoiseu
ille
CNo-slip
Sta
bilityatlowRe.
Lee
and
Finlayso
n[50]
UCM
PlanePoiseu
ille
CNo-slip
Flow
isstable
atlowRe.
PlaneCouette
CNo-slip
Flow
isstable
atlowRe.
Ren
ard
yandRen
ard
y[82]
UCM
PlaneCouette
C/A
No-slip
Sta
bilityatzero
andlowRe.
Lim
andSch
owalter
[51]
Giesekus
PlanePoiseu
ille
CNo-slip
Sta
bilityatlowRe.
Ren
ard
y[77]
UCM
PlaneCouette
AM
emory
slip
Instability
whenRe=
0and
slip
ishappen
ing.
Geo
rgiou[25]
UCM
PlanePoiseu
ille
A/C
Non-linea
rslip
Instability
when
theslopeofth
e
flow
curv
eis
neg
ative.
Shoreetal.
[87]
UCM
PlaneCouette
CDynamic
slip
Non-m
onoto
nic
flow
curv
e.
Black
and
Gra
ham
[13]
UCM
PlaneCouette
AKinetic
slip
Instability
whenRe
=0
after
a
criticalflow
rate.
Black
and
Gra
ham
[29]
UCM
,PTT
Planarsh
ear
A/C
Norm
alstress
dep
enden
tslip
Norm
al
stress
dep
enden
cere-
quired
forinstability.
Tab
le3:
Sum
mar
yof
stab
ility
anal
yse
sof
flow
.A
-an
alytica
lre
sults,
C-co
mputa
tion
alre
sults.

16
stable to short waves at low Reynolds numbers. These results, and the results for
plane Couette flow, show clearly that there are no elastic instabilities present when
a reasonable constitutive equation and no-slip boundary conditions are used.
The lack of low Reynolds number instabilities has motivated a number of studies
employing a variety of of slip boundary conditions. Pearson and Petrie [66] were
among the first to analyze flows with slip, and they studied several algebraic slip
models in which the slip velocity depends upon the shear stress. They showed
that the flow could be unstable only if the slip curve, which is a plot of the slip
velocity versus shear stress, was nonmonotonic, i.e. dusdτyx
< 0, for some region
of the curve. Essentially, this is equivalent to a nonmonotonic flow curve, with
the nonlinearity that causes the flow curve to be multi-valued transferred to the
boundary. Renardy [77] used one of the models proposed by Pearson and Petrie,
namely the memory slip model
DusDt
+ λsus = f(τyx), (1)
where us is the slip velocity, τyx is the shear stress, and λs is the relaxation time for
slip. For this dynamic slip model, the slip velocity depends upon the shear stress
and the shear stress history, through the inclusion of a convected derivative term,
and the slip velocity is a monotonically increasing function of the shear stress. The
upper convected Maxwell model was used to describe the bulk behavior, and slip
was assumed to be happening. He found analytically that with Re = 0 the flow was
unstable to short waves. However, the growth rate is proportional to the square
root of the wavenumber, implying that the the growth rate is infinite for infinitesi-
mal waves. Therefore, this instability is a Hadamard-type instability resulting from

17
ill-posedness of the problem at the boundary. Also, the model can predict a fi-
nite slip velocity even when the shear stress is zero. These unphysical properties
bring the model validity into question [13]. Georgiou [25] used a slip model explic-
itly constructed to predict a nonmonotonic region in the slip curve to study the
incompressible plane Couette flow of an Oldroyd-B fluid. He performed both an
analytical stability analysis and numerical simulations of the flow. The results do
predict instability, but only when the slope of the slip curve is negative. Finally,
Shore et al. [87, 88] proposed a rather complex slip model which incorporates a first
order phase transition near the wall. Again, the model only depends upon shear
stresses and instability only occurs on the decreasing branch of the slip curve with
the most unstable wavenumber being zero. Both of the latter two analyses essen-
tially confirm the results of Pearson and Petrie [66]. The obvious conclusion from
these analyses is that shear stress dependent slip models cannot predict instabilities
consistent with experimental observations of sharkskin. The mechanisms for slip
and improved slip models which incorporate more of the essential physics of chain
orientation and stretching are described in the following chapter.

18
Chapter 2
Modeling of Wall Slip
2.1 Slip Mechanisms
Two broad explanations exist for slip at the interface between the melt and the die,
as shown in Fig. 6. First, molecules anchored at the wall can desorb from the surface,
with the rate of desorption dependent upon the strength of interaction between the
die wall and the polymer melt. The second method is disentanglement between a
layer of polymer molecules adsorbed to the wall and the first bulk molecular layer.
As the die surface is changed, the grafting density is changed, thereby changing the
force and hence, the critical stress, for the disentanglement process.
Several observations suggest that desorption is important at the interface. Hal-
ley and Mackay [30] reported dezincification of a brass die and the resultant for-
mation of a porous metal surface during the extrusion of LLDPE. These alter-
ations to the metal surface seemingly cannot be explained by a purely entangle-
ment/disentanglement slip mechanism. Mackay and Henson [53] argued that, based

19
����������������������������������������������
��������������������������������������������
��������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������
(a)
(b)
Figure 6: Schematic of the two principal mechanisms for slip. The dark line is achain adsorbed to the surface. (a) - the adsorbed chain desorbs and slides alongthe surface, (b) - the adsorbed chain disentangles from the bulk chains, which thenmove along the interface. The shear flow is to the right.
on the activation energy for desorption for PS on steel, the force holding the chains
to the surface was the same order of magnitude as the drag force on the chains, so
that some fraction of the chains was detached from the surface. A similar argument
was put forth by Yarin and Graham [106] with regard to the experimental data of
Piau and El Kissi [70] for LLDPE. Yarin and Graham concluded that, based on
their proposed model for slip, which included competition between desorption and
disentanglement, desorption for LLDPE was a faster process than disentanglement
and desorption can lead to nonmonotonic slip curves.
Several authors, including Brochard and de Gennes [16], Ajdari et al. [3], and
Mhetar and Archer [57, 56], have proposed scaling theories for disentanglement.
These theories are based on the paradigm that an anchored molecule which does
not interact with other anchored molecules can be modeled as a chain pulled by
one end through the bulk material. The conformation of the pulled, or probe, chain

20
changes as the pulling force (F ) increases, and the friction coefficient, ζ , can be
estimated for various regimes. The result is a curve of the pulling force, F , versus
the chain velocity, V = F/ζ. On a macroscopic level, F is related to the shear
stress at the wall and V is related to the slip velocity. There are generally several
low slip regimes, followed by a regime where the probe chain disentangles from the
bulk chains.
The entanglement/disentanglement idea was originally proposed as an expla-
nation for gross melt fracture. At the transition, there is sudden disentanglement
throughout the die and the boundary condition shifts from no-slip to complete slip.
During slip, the stresses relax and the chains reentangle. Hysteresis is expected
due to the resultant chain orientation and stretching. Wang and coworkers [100]
have recently extended the idea in an attempt to explain both the sharkskin be-
havior and the slope change in the flow curve. In their hypothesis, the well-known
stress singularity at the die exit causes the critical stress for disentanglement to be
exceeded locally in the exit region before it is exceeded throughout the die. The
boundary condition oscillates between the stick and slip states at the die exit. Dis-
entanglement releases the singular stress, allowing the chains to reattach and start
the oscillation over again.
The predictions of these theories are in agreement with some experimental ev-
idence [58] but are not conclusive. In particular, Drda and Wang [22] and Wang
and Drda [99] argued that the temperature independent extrapolation length that
they measured for HDPE was direct evidence for the entanglement/disentanglement
transition. Yarin and Graham [106] demonstrated that desorption can lead to the

21
same behavior. Wang et al. [100] showed that the sharkskin oscillation period cor-
related directly with the polymer relaxation time and argued that this also was
conclusive evidence of disentanglement. However, the dynamics of reattachment
and reentanglement are both expected to be dominated by relaxation of the poly-
mer chain so that this observation is inconclusive at best. A final limitation is that
the slip velocity is always associated only with the shear stress at the wall. This
is not consistent with physical intuition regarding slip, where the orientation and
stretching of chains are important.
2.2 Connections Between Normal Stresses and Slip
Several factors and observations motivate the inclusion of normal stresses into slip
models. First, as described in §1.3.2, shear stress dependent slip models have
failed to predict instabilities consistent with sharkskin. Second, from a more meso-
scopic viewpoint, the interactions at the wall can be modeled as junction points,
similar to the junction points in network theories for bulk constitutive behavior.
The most successful network constitutive equations, the Marrucci [1] and Phan-
Thien/Tanner [69, 68] models, were derived with the assumption that the lifetime
of the network strands depends on the stress in the fluid, specifically the normal
stresses through the trace of the extra stress tensor. The situation near the die wall
should be similar, and this was exploited by Hatzikiriakos and Kalogerakis [35],
who developed a stochastic network theory. Third, the normal stresses measure the
elongation of the molecules, or equivalently, the tension in the chains, and higher

22
tension should increase both the rate of desorption and the rate of disentangle-
ment, so that regardless of the mechanism for slip, the higher the normal stresses,
the higher the slip velocity. This idea can also be applied to the scaling theories
for polymer disentanglement. In these scaling theories, the friction force depends
upon the number and lifetime of entanglements surrounding the probe chain. It is
generally assumed that the bulk material is at equilibrium and the probe chain is
being pulled through this quiescent material. However, during extrusion, the bulk
material is stressed, and the lifetime of entanglements depends on the stress. As
a possible first correction the the scaling theories, the friction coefficient should
depend upon the normal stresses to account for the stress in the bulk material.
Experimental observations also suggest a link between normal stresses and shark-
skin. It is widely accepted that the normal stresses are the root cause of die swell.
It has been observed (El Kissi and Piau [44]) that the amount of die swell decreases
at the onset of sharkskin, indicating that the normal stresses are reduced in the
fluid, possibly due to slip. Perhaps the most direct experimental evidence for a
normal stress dependence is the peeling experiments of Hill et al. [38]. Based on
standard theories of adhesion, they derived the following condition for the critical
normal stress difference for the onset of slip and instability:
N1 ∼=2Wa
fδr, (2)
where Wa is the work of adhesion, δr is the thickness of a proposed rubbery region
near the wall (c.f. Vinogradov and Ivanova [97, 98]), and f is the fractional recovery.
f is between zero and one and is used to take into account the fact that the rubbery
region is constrained to remain near the wall by the bulk fluid. The work of adhesion
is related to the surface free energy of the polymer and the die wall. The free energy

23
of the metals used to make dies is typically much larger than the surface free energy
of the polymers, so that Wa basically equals the free energy of the die wall. Several
other approximations give f = 0.2 and δ = R/4, where R is the radius of the
capillary. Therefore, a very simple criterion exists for instability and slip, namely
N1,c ∼=40Wa
R, (3)
For comparison with experimental data, most of which is reported in terms of a
critical shear stress, the normal stress difference can be replaced by the recoverable
shear, sR = N1,w/τyx. The recoverable shear is normally order unity at the onset of
instability so
τyx,c =40Wa
R. (4)
This criterion compares very well to the results of Ramamurthy [75], lending sup-
port to the conclusion that normal stresses influence melt fracture. Peeling tests
performed by Ajji et al. [4] also link the adhesion strength to the onset of sharkskin
melt fracture.
Experiments have shown that slip is relevant to sharkskin, although its role in
sharkskin formation has not been theoretically elucidated. This may be due to the
fact that current slip models have neglected normal stresses in their formulations,
even though experimental evidence and physical intuition suggests that they are
important. Ideally, we would like to understand the molecular dynamics and the
fluid dynamics in a real die geometry during extrusion. As a starting point, and
to highlight the generality with which normal stress effects can be included in slip
models, we derive simple slip models which include more of the essential physics.
The models are introduced below and analyzed in the next chapter.

24
2.3 A Slip Model Based on Network Theory
The network slip law to be used here can be motivated by a few simple, physical
arguments. Consider the coarse grained picture of polymer molecules interacting
with the wall shown in Figure 7. The junction points can be chemical bonds, in-
Figure 7: Kinetic slip model. Left: All polymer molecules are interacting with thewall. Right: A portion of the molecules are no longer interacting with the wall.
termolecular forces, hydrodynamic interactions, physical adherence, or molecular
entanglements, all of which are lumped together in this analysis. X is a structural
parameter that will describe the state of interaction between the polymer and the
wall. At equilibrium, X = 1, and all of the available sites for polymer-wall inter-
action are filled. During flow, some of the strands are lost due to breaking of the
junction points with the wall, 0 < X < 1, and these strands can slide along the
surface. The velocity of the free strands is given by
uf∗ =
ε∗τyx∗
X, (5)
which is simply a rearrangement of Stoke’s law with the drag coefficient proportional
to X. This makes sense, as larger X implies that a moving strand has to travel

25
through more strands still attached to the wall and will experience greater drag.
In Eq. 5, τyx∗ is the shear stress at the wall, ε∗ is a constant, and the superscript
star (∗) implies that the variables have dimension. An overall slip velocity can be
obtained by averaging the velocity of the free segments and the velocity of the bound
segments (which is zero) to get
us∗ = ε∗
(1−X
X
)τw∗. (6)
To complete the slip model, an expression for X in terms of the flow variables is
needed. A kinetic expression is used to describe the evolution of X as a function of
time and the stress,
DX
Dt=
1
λs[(1−X)− sXF (trτ )] , (7)
where λs is the relaxation time for slip, and s is a constant. The first term on the
right hand side describes the attachment kinetics (i.e. the forward reaction), and
hence, λs can be interpreted as the reciprocal of the attachment rate constant. The
attachment kinetics are proportional to the fraction of polymer molecules that are
detached from the wall. The second term describes the detachment kinetics. The
detachment rate is assumed to depend upon the polymer orientation and stretching
at the wall, through the function F . The detachment kinetics are proportional to
the fraction of bonded polymer molecules and s, which essentially is an equilib-
rium constant which gives the ratio between the attachment and detachment rate
constants.
Two main ideas are espoused in this kinetic law. One is that the rearrangement
at the wall is not instantaneous, but rather, has some finite relaxation time. In
addition, attachment and detachment do not necessarily take place at the same

26
rate. The second is that the breakage kinetics depend upon the normal stresses.
For simple kinetic theory models of polymers, specifically Hookean dumbbells, the
trace of the stress tensor is proportional to the mean square end-to-end distance
[10], and the detachment from the wall thus depends upon the conformation of the
molecule. The trace of the stress tensor can also be thought of as a measure of the
elastic stress in the molecules. Higher values of tr τ imply that the molecule feels
more tension in the x- and y-directions.
Several other comments are in order. First, all the F functions which have been
considered are continuous and monotonically increasing. Therefore, the slip velocity
will be a monotonic function of the stresses. Second, the parameters ε, λs, and s
will depend upon the strength and type of interactions between the polymer and the
die wall. In terms of rate constants, λs = 1/ka and s = kd/ka, where ka is the rate
constant for the formation of strands and kd is the rate constant for the destruc-
tion of strands. Within the entanglement/disentanglement mechanism, the rate
constants ka and kd are the inverses of the relaxation times for entanglement and
disentanglement, respectively, at the surface. According to Ajdari et al. [3], these
are the constraint release times, ka ∝ kd ∝ 1/τcr ∝ 1/(τRN5/2). τR is the Rouse
relaxation time, which is proportional to N2 and has an Arrhenius temperature
dependence (because it depends upon the monomer friction coefficient). Clearly,
these kinetic constants only depend upon bulk properties and are independent of
any surface energetics or characteristics. The only place for surface properties to
show up is in the slip coefficient, ε. The slip relation itself is just a statement of
Stokes’ law, so that ε is essentially the friction coefficient. The frictional force will
depend upon the number of adsorbed chains that the bulk chains must slide past,

27
i.e. ε = 1/(neζ), where ζ is the monomeric friction coefficient and ne is the equilib-
rium number density of chains at the surface. The situation is somewhat different
when the mechanism for slip is adsorption/desorption at the wall. In this case, the
kinetic constants essentially follow the Arrhenius relation with activation energies
that depend upon the work of adhesion between the polymer and the surface [37].
The temperature dependence is the same as for the disentanglement case and the
rates of adsorption and desorption increase strongly with temperature. The work
of adhesion is a function of the surface free energies, so that the kinetics of attach-
ment/detachment depend intrinsically on the interactions between the polymer and
the solid surface. In addition, the slip coefficient depends on the surface coverage;
but now, in general, the surface coverage depends on the kinetics at the surface
and is a complicated function of the stress [106]. For the network slip model, this
coefficient should depend only on the equilibrium number of adsorbed chains, ne.
Molecular simulations (Bitsanis and various coworkers [65, 11]) and molecular the-
ories [85, 86] suggest that the number of segment-surface contacts increases as the
square root of the molecular weight. The kinetics of this slip mechanism, however,
do not explicitly depend upon the molecular weight of the polymer, as the kinetic
constants basically describe monomer adsorption and desorption at the surface.
2.4 Anisotropic Drag Slip Model
Similar functional forms for the slip velocity can be obtained from more detailed
arguments. Yarin and Graham [106] recently proposed a slip model obtained from
kinetic theory arguments for a polymer represented by a bead-spring model. The

28
conformation of a molecule anchored to the wall at the origin is given by the balance
between the drag forces due to the bead motions and the restoring spring force,
assumed Hookean,
ζ ·
[us −
dR
dt
]−
3kT
a2R = 0, (8)
where R = (X, Y ) is the end-to-end vector of the dumbbell, ζ is the friction tensor,
us = (us, 0) is the bulk slip velocity in the x-direction, k is the Boltzmann constant,
T is the absolute temperature, and a is the characteristic coil size of the molecule at
equilibrium. The molecular stretching is assumed strong enough to neglect Brow-
nian forces along the chain. Yarin and Graham assume that the friction tensor is
isotropic, i.e., ζ = ζoδ, where δ is the unit tensor. If, instead, the friction tensor is
anisotropic and given by the Giesekus formula [10], ζ−1 = 1ζ0
(δ + ρτ ), then Eq. 8
can be written in component form as
us −dXdt− 3kT
a2ζ0[X + ρτxxX + ρτyxY ] = 0
dYdt
+ 3kTa2ζ0
[Y + ρτyxX + ρτyyY ] = 0. (9)
X is related to the shear stress by Hooke’s law, τyx/n = HX, where H(= 3kT/a2)
is the spring constant and n is the number density of anchored dumbbells. Yarin
and Graham consider the case where the surface coverage depends upon the shear
stress. For simplicity, it is assumed here that anchored molecules are permanently
attached so that n is a constant, Eq. 9 can be solved at steady state to give
us = ε
[(1 + ρτxx)(1 + ρτyy)− ρ2τ2yx
(1 + ρτyy)
]τyx. (10)
where ε = 1/(ζ0n). If ρ = 0, the quasi-steady approximation reduces the anisotropic
drag model to a Navier slip relation. Eq. 10 predicts monotonically increasing slip

29
and flow curves. This contrasts with the full Yarin-Graham model, which predicts
non-monotonic curves. Taking n to be constant eliminates the competition between
surface coverage and molecular stretching responsible for the non-monotonicity.
While the approximations used here are severe, our purpose in deriving this model
is to illustrate that slip models which contain normal stress dependencies can be ex-
pected to arise from more detailed treatments when the relevant physics is included.
Eq. 10 is similar to the static Black-Graham slip model, except that the function F
here depends upon all the stress components, not just the normal stresses.

30
Chapter 3
Stability of Plane Shear Flow of a
Polymer Melt with Slip†
3.1 Relevance of Viscometric Flow to Die Exit Flow
Die exit flow is the problem of primary importance in understanding the inception of
sharkskin deformation during extrusion, however, this problem has several inherent
complications which make analysis difficult. Fig. 8 shows a schematic of a die during
polymer melt extrusion. The melt swells as it leaves the die due to the elasticity of
the fluid, and the boundary is discontinuous, transitioning from solid boundaries to
free surfaces. This leads to velocity profile rearrangement, with the fully developed
pressure driven flow far upstream from the corner evolving to plug flow downstream.
The boundary singularity also causes the development of singular stresses as the
corner is approached. These difficulties make tackling the full die exit flow stability
†The results presented here were published in part in references [13] and [14].

31
Figure 8: Typical die exit showing the geometric singularity where the free surfacebegins and die swell. The fully developed upstream flow is paraboloidal and thedownstream flow is plug.
problem a formidable task.
Fortunately, simple viscometric flows are relevant to die exit flows. This can
be seen by examining flow around sharp corners. Dean and Montagnon [20] and
Moffatt [61] derived similarity solutions for Stokes’ flow around sharp corners, in-
cluding symmetric solutions which are applicable to free surfaces downstream of the
corner. Fig. 9(a) shows the case of a reentrant corner and Fig. 9(b) shows a free
surface downstream of the corner. In both cases, the flow is viscometric near the
333333333333333333333333333333
V
V
CV
Cθ33333
33333B
(a) (b)
θ = 0
θ = 3π2
θ = 0
θ = α
Figure 9: Stress boundary layers in corner flows.
solid surfaces (θ = 0 in (a) and (b) and θ = 3π2
in (a)), with ψ ∼ rρθ2, where ψ is
the stream function, θ is the angular coordinate in cylindrical coordinates, and ρ is
the power law exponent. Near the free surface, however, the stream function adopts
an elongational form, ψ ∼ rρ(α− θ), where θ = α is the position of the free surface.
Renardy [79] and Hinch [39] studied the flow of a upper convected Maxwell fluid

32
around a reentrant corner and found that viscometric boundary layers exist near the
solid surface for both Newtonian and viscoelastic kinematics. These boundary lay-
ers, denoted by V in Fig. 9, are also present for a nonlinear viscoelastic constitutive
equations [81], although the boundary layer thickness is much larger for the Phan-
Thien–Tanner model than the UCM fluid. The presence of this region suggests
that a simplified analysis using model geometries may be useful in understanding
the dynamics of die exit flows.
Therefore, planar shear flows are examined here as a first attempt to under-
stand how normal stresses influence interfacial slip and surface distortions in poly-
mer processing. Such an analysis is useful for extracting the underlying molecular
mechanisms for instability and for determining the qualitative potential of normal
stress dependent slip models to predict instabilities consistent with sharkskin. It is
possible to analyze general slip models in planar, parallel shear flows if a simple con-
stitutive equation, namely the upper convected Maxwell equation, is used. These
results are presented first and, as shown below, several predictions are consistent
with sharkskin deformations. Then, the specific slip models introduced in Ch. 2 are
analyzed in order to relax some of the inherent assumptions in the general analysis.
Analytical solutions are still possible of the UCM equation is used, but to examine
more complex constitutive behavior, numerical techniques must be employed.
3.2 Formulation
The model problem considered here is simple shear flow between two parallel plates,
shown schematically in Fig. 10. The origin is located at the bottom plate and the

33
*u (y)
γt*
.b*
us*
����
����
����
����
��������������x
yl
Figure 10: Basic parallel shear flow geometry with slip at the solid surfaces. ACouette velocity profile is shown on the left and a Poiseuille profile on the right.For short wavelength perturbations, only the shear rate near the wall is important.
flow can be either a Couette flow driven by the motion of the top plate, a Poiseuille
flow driven by a pressure gradient, or some linear combination of the two. The
constitutive behavior of the fluid is described generally by the Phan-Thien–Tanner
(PTT) network model without nonaffine motion [69],
τ (1) +1
Wen(1 + µ tr τ )τ = γ, (11)
where γ = ∇v + (∇v)T is the strain rate tensor, v is the velocity vector, τ is the
polymer extra stress tensor, µ describes the effect of τ on the creation and destruc-
tion rates of network junctions, and the the convected derivative, τ (1), is given by
τ (1) =∂τ∂t
+v ·∇τ −{τ · (∇v)+ (∇v)T ·τ}. The upper convected Maxwell (UCM)
equation, Eq. 11 with µ = 0, is used for the majority of the results because of its
simplicity even though it does not describe the shear thinning behavior of real poly-
mer melts. The full PTT model, which predicts shear thinning in the viscosity and
first normal stress coefficient, but has a zero second normal stress difference, is used
to gauge the effect of nonlinear viscoelasticity. In Eq. 11, the stresses have been

34
nondimensionalized by the shear modulus, G∗ = ηp/λ, where ηp is the zero-shear
rate viscosity and λ is the bulk polymer relaxation time, time and shear rate by the
nominal shear rate at the wall, and lengths by the gap width, l. More details on
the nondimensionalization can be found in Appendix A.1. The asterisk indicates
dimensional quantities while unmarked quantities are dimensionless. Certain vari-
ables, such as the relaxation time, λ and the viscosity, ηp, always have dimension.
The nominal Weissenberg number, Wen(= λγ∗n), is the dimensionless applied shear
rate at the wall. The shear rate in the fluid is less than the applied shear rate due to
slip, so a second dimensionless shear rate, the true Weissenberg number, Wet = λγ∗t
must be defined, where γ∗t is the actual shear rate in the fluid at the wall. The ratio
of Weissenberg numbers appears frequently and is denoted as γ = Wet/Wen. The
flow is assumed to be incompressible and inertialess (Re = 0), so that the equations
of continuity and motion are, respectively,
∇ · v = 0 (12)
∇ · τ −∇p = 0. (13)
These equations have been nondimensionalized in the same manner as the consti-
tutive equation (c.f. Appendix A.1).
The tangential velocity boundary conditions are provided by slip models relating
the slip velocity to the stress tensor. The slip models considered here have the
general, nondimensional form
us = f(τ , σnn)τyx, (14)
where σ is the total stress tensor, σ = −δp+ τ so that σnn = n · σ ·n is the total
normal stress acting on the wall, where n is the outward unit normal. This general

35
form allows the slip velocity to depend upon molecular stretching and orientation,
through the normal stresses, as well as the isotropic pressure in the system. The
asymptotic results considered below are facilitated by rewriting the slip relation in
terms of the extrapolation length, b∗, defined in general as b∗ = u∗s/γ∗t . As shown
below, the steady state dimensionless shear stress at the wall is τyx = Wet/(1 +
µτxx) = Wenγ/(1 + µτxx), and therefore, b(= b∗/l∗) is, from Eq. 14,
b =fWen
1 + µτxx, (15)
where f = f(τ , σnn) and overbars denote steady state values.
The stability of the flow is determined by a linear stability analysis. Only stabil-
ity with respect to two-dimensional disturbances is examined, as Squire’s theorem
holds directly for the UCM equation [93]. The basic equations are first solved for
the unidirectional flow field, which for plane Couette flow is given by
u = γy + us, (16a)
v = 0, (16b)
τyx =Wet
1 + µτxx, (16c)
τyy = 0, (16d)
the pressure is arbitrary, and τxx is given by the only real solution to µ2τ 3xx+2µτ 2xx+
τxx−2We2t = 0. Stability is determined by examining perturbations to the base flow.
The flow variables, p – pressure, u – x-component of velocity, v – y-component of
velocity, τxx – first normal stress, τyx – shear stress, and τyy – second normal stress,
are written as a = (u, v, τxx, τyx, τyy, p) = a + a, with the perturbations given by
the normal mode form a = a(y)eikx(x−ct)+c.c. The overbar indicates the base state

36
values and the hat denotes the perturbation amplitudes. The basic equations are
linearized around the steady state, resulting in a generalized eigenvalue problem
for the eigenvalues {c} and eigenvectors {a}. This procedure is shown in detail in
Appendix A.2 for planar shear flow of the PTT fluid, where the system of equations
for the perturbations is derived and it is shown that this system can be reduced
to one general stability equation, Eq. 89, which is analogous to the famous Orr-
Sommerfeld equation from Newtonian fluid mechanics [21]. The eigenvalues are in
general complex, with the imaginary part giving the exponential growth or decay
rate of the perturbations. If an eigenvalue satisfies Im(c) > 0, perturbations grow
and the flow is unstable. Analytical expressions for the eigenvalues can be obtained
when the UCM equation (µ = 0) is used as the constitutive equation. For more
complicated constitutive relations, numerical methods must be employed.
3.3 Asymptotic Solutions with General Slip Models
The stability analysis of planar shear flow of the UCM fluid in the asymptotic case
Wen � 1 and b � 1 is discussed first. These assumptions permit examination of
instability without requiring a particular model for slip. These results clarify the
general roles of the elastic normal stresses and pressure in the stability of flow with
slip.
The approach taken here is motivated by the observation that, in the absence
of slip, the growth rates of perturbations approach zero (from below) as We−1n as
Wen →∞ [27]. So, by perturbing 1/Wen from zero, the growth rates are perturbed
from zero, i.e. from marginal stability. The small slip limit (b � 1) allows the

37
approximation Wet = Wen, eliminating the need to specify a particular expression
for us. Finally, the large wavenumber assumption implies that there are boundary
layers localized near the solid surface and it turns out that only the inner, boundary
layer solutions need to be considered to determine the stability. As shown below, the
condition kx � 1/(bWen) is required for the asymptotic solutions to be uniformly
valid and, therefore, the approximation is self-consistent.
Several additional assumptions are made. First, f in Eq. 14 is taken to be an
increasing function of each of the stress components, so that non-monotonicity is
not introduced into the slip behavior or the flow curve, and inertia is neglected. To
find the boundary layer near the bottom plate the y-coordinate is scaled with the
wavenumber as y = kxy. The base state velocity profile is u = us + y/kx + O( 1k2x
),
the steady state slip velocity is us = bγ = b, and the base state stresses are:
τxx = 2We2n+O( 1kx
), τyx = Wen+O( 1kx
), and τyy = 0. When the asymptotic scalings
are applied to the general stability equation, Eq. 89, the result at leading order in
wavenumber is
(Q2d2
dy2− Q2 − 2Q
d
dy+ 2)(
d2
dy2+ 2iWen
d
dy− 1− 2We2n)v = 0 (17)
where Q = y − kxc− i/Wen. The four solutions to this equation are
v = (y − kxc)e±y, e±(iWen+
√1+We2n)y. (18)
Only the two decaying solutions can match the outer solution (v = 0) and are
physically realistic. After application of the no-penetration boundary condition,
v = 0, the solution to Eq. 17 is
v = K1kxce−(iWen+
√1+We2n)y + k1(y − kxc)e
−y, (19)

38
where K1 is a constant of integration which drops out later in the analysis. Eq. 19
suggests a velocity boundary layer thickness of 1/kx, since the second term on the
right hand side dominates at large Wen, and a stress boundary layer of thickness
1/(kxWen), because the first term on the right hand side dominates the expression
for the velocity gradients, and hence the stresses, at large Wen. These boundary
layer scalings are consistent with those reported by Renardy [80] and Graham [28].
The solution given by Eq. 19 is used to derive expressions for the stress components,
which are then substituted into the slip model to obtain the eigenvalues. The slip
equation for the perturbations can be written in the linearized form
us =bB
Wen(τyx + Rτxx + Gτyy −Hσnn), (20)
where the coefficients are
B = 1 + τyxf
(∂f∂τyx
)τ ,σnn
,
R =τyx( ∂f
∂τxx)τ ,σnn
f+(∂f∂τyx
)τ ,σnn
,
G =τyx
(∂f∂τyy
)τ ,σnn
f+(∂f∂τyx
)τ ,σnn
,
H =−τyx( ∂f
∂σnn)τ,σnn
f+(∂f∂τyx
)τ ,σnn
,
(21)
and the negative sign in front of H explicitly takes into account the experimental ob-
servation that increasing pressure decreases the slip velocity(Kalika and Denn [42],
Hatzikiriakos and Dealy [34], White et al. [102]). Examination of the linearized
constitutive equation reveals that τyx = O(Wen), τxx = O(We2n), and τyy = O(1)
as Wen → ∞. Because τyy is relatively small, it is neglected in this analysis. The
coefficients B and R are both positive, as one of the basic assumptions is that the
slip curve is monotonically increasing.

39
The first case of interest is shear stress dependent slip case, i.e., R = H = 0.
To obtain large Weissenberg number expressions, B is assumed to be strictly O(1).
This way, the slip velocity remains nonzero but bounded as Wen → ∞. There are
three discrete eigenvalues, which to leading order in 1/Wen are
c =
(12− i
(1 +
√32
))1
kxWen+ O( 1
We2n)(
12− i
(1−
√32
))1
kxWen+ O( 1
We2n)
(1− i) bB + O( 1kxWen
)
. (22)
Two roots scale as 1/Wen, one root is O(1) and all of the eigenvalues are stable,
i.e. Im(c) < 0. There is also a stable, continuous set of eigenvalues at c = y/kx −
i/(kxWen). In order for the second order terms to be asymptotically smaller than
the first order terms, kx � 1/(bWen). This condition holds for higher order terms
as well, so that the assumption of large wavenumbers was justified. This analysis
confirms the previous literature results [66] that shear stress dependent slip does
not lead to instability when the slip velocity is an increasing function of the wall
shear stress.
To determine the effect of adding normal stress and pressure dependencies, it is
necessary to first determine the scalings necessary for the pressure and normal stress
contributions to be the same order as the shear stress contribution, as this leads
to the most interesting results. The total normal stress on the surface at y = 0 is
σnn = −σyy = p− τyy. An expression for the pressure perturbation can be obtained
from the x-component of the equation of motion as
p = τxx −i
kx
dτyxdy
. (23)
Explicitly introducing the eigenvectors shows that, even though both dτyx/dy andτxx
are O(We3), p is O(We2), due to cancelation, and is therefore, the same order as the

40
shear stress. This suggests the scalings R = R0/Wen and H = O(1), where R0 is
O(1). Since τyy � p, Eq. 20 can be written as
us =bB
Wen
[τyx +
R0Wen
τxx −H
(τxx −
i
kx
∂τyx∂y
)]. (24)
Four discrete eigenvalues are found this time, with three of them being small in
magnitude (O(1/(kxWen))) and one being large (O(1)). If H = 0, we find that
normal stress dependent slip leads to well-posed instability. In this case, the large
root is found to be stable and one of the small roots becomes unstable at R0 =
0.1826 [13]. This criterion is independent of both kx and b. Thus, rewriting in
terms of the unscaled coefficients, instability is predicted to occur if
Wen >0.1826
R, (25)
for small R. The growth rate for the disturbances, kxIm(c) is bounded for all
wavenumbers, so that the model is well-posed for this case, and the real part of c
for this root is O(1/Wen), so that the wave speed, Re(c) = us +Re(c), is essentially
equal to the steady state slip velocity and the instability is convected along with the
base flow. As in the previous case, kx � 1/(bWen). The dimensionless frequency,
defined as ω = kxRe(c) = kxb+kxRe(c) is O(kxb), so that the dimensional frequency,
ω∗ = γ∗nω � kxbγ∗n is proportional to the wavenumber and the critical shear rate
at high Wen. A picture of the destabilizing disturbance is shown in Fig. 11. The
stream function and normal stress perturbations shown would be superimposed on
the base state flow. The streamlines show pairs of counter-rotating vortices, with
the dotted lines denoting clockwise rotation and the solid lines counterclockwise
rotation. The tops of the vortices are cut off on the graph in order to illustrate
the stress boundary layer, which is much thinner than the velocity boundary layer.

41
0 2 4 6 8 10 12x�
0
0.2
0.4
0.6
0.8
1
y�
Figure 11: Snapshot of the destabilizing disturbance at the onset of instability,showing perturbation streamlines overlaid on a density plot of the first normalstress perturbation in a coordinate system moving with the wavespeed (≈ us). Thenominal Weissenberg number is 20. The dashed lines denote clockwise rotation andthe solid lines counterclockwise rotation. The white regions in the density plot areregions of large, positive τxx and the black regions are regions of large, negativestress. The arrow denotes the base flow direction.
These observations comprise the most important result of the analysis: the normal
stress dependence of the slip velocity is necessary for instability, and for B > 0 and
any value of R > 0.1826/Wen there is a finite Wen above which the flow is unstable.
If R0 = 0 but H > 0, then a result similar to the Coulomb friction result of
Renardy [78] is found, as the large root, which has growth rate proportional to
kx, becomes unstable at H = 1. All three of the small roots are stable, and, in
addition, one of them collapses to the end of the continuous spectrum, which is
given by the same relation, c = y/kx − i/(kxWen), as before. In this case, the
instability is the result of ill-posedness at the boundary. Typically, the pressure
dependence is assumed to follow an exponential form, i.e., f ∝ e−β∗p∗, where the
pressure coefficient is very small (β∗ ≈ 10−3 MPa−1 for LLDPE [67]). The stability

42
0.0 0.2 0.4 0.6 0.8 1.0R0
0
1
2
3
4
H
66666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666
11111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111
Unbounded growth rate
Bounded growth rate
Figure 12: Stability diagram for pressure- and normal stress- dependent slip. Thesolid curve is the neutral curve for the small (bounded growth rate) root and thecorresponding unstable region in parameter space is indicated by the forward hatch-ing. The dashed curve is the neutral curve for the large (unbounded growth rate)root with its unstable region highlighted by the backward hatching. Both roots areunstable in the cross-hatched region.
criterion for this model is Wen,c = 1/β � 1, where β = β∗G ≈ 10−4 for LLDPE. We
therefore consider it highly unlikely that interactions between elasticity and pressure
dependent slip could be responsible for sharkskin, as this results in extremely large
critical Weissenberg numbers for instability.
Much more complicated dynamics are found if H and R0 are both nonzero. From
the limiting cases described above, increasing the pressure coefficient, H, stabilizes
the small root and destabilizes the large root, while increasing the normal stress
coefficient, R0, has exactly the opposite effect. This leads to regions in parameter
space where both roots are stable, only one is unstable, or both are unstable, as
shown in Fig. 12. Generally, for small values of the pressure coefficient, the small
root is unstable at large enough Wen and the growth rate is independent of kx, while
the large root is unstable for larger values of the pressure coefficient at sufficiently

43
large Wen, and the growth rate is O(kx). There is also an overlap region where both
roots are unstable.
This analysis leads to several stability predictions. These results clearly show
that a slip model where the slip velocity depends solely on shear stresses will not
lead to hydrodynamic instabilities. However, an arbitrarily small, but nonzero,
normal stress slip dependence does lead to short wave instability if Wen is large
enough. In an extrusion die, velocity profile rearrangement at the die exit leads to
an extensional component of the velocity profile there and large normal stresses in
the exit region. The instability predicted here should then be manifest first in the
exit region, which may explain why many investigators have attributed sharkskin
to an exit effect. In fact, similar behavior is expected at an interior boundary
singularity. Barone and Wang [7] coated the downstream half of a slit die with
a fluoropolymer to prevent adhesion and promote slip and left the upstream half
uncoated. They found evidence of instability near the change in surface condition
which decayed downstream. The boundary singularity results in an extensional
velocity component which increases the stresses, particularly the normal stresses,
and triggers the instability. Downstream from the singularity, where fluoropolymer
prevents adhesion and the slip velocity is therefore proportional to the shear stress,
the flow is stable and the instability decays.
Although these results do not depend on the specific form of the slip model,
there are a number of limitations to the analysis. To address these limitations, it is
necessary to perform analytical and numerical analyses incorporating specific slip
models, nonlinear viscoelasticity, and finite wavelength perturbations.

44
3.4 Results with Specific Slip Models
3.4.1 Analytical Results for the UCM Equation
The analytical results discussed below are specialized to the UCM equation in plane
Couette flow, for which the general stability equation simplifies to Eq. 90. The
solutions to this equation were first given by Gorodtsov and Leonov [27] and used to
determine the eigenvalues for no-slip boundaries. Here, the network and anisotropic
drag slip models introduced in Ch. 2 are employed in order to relax the assumptions
inherent in the asymptotic results presented above.
The network model with F = tr τ is, in dimensionless form,
us = ε
(1−X
X
)τyx (26)
DX
Dt=
1
Wes[(1−X)− s tr τ ] (27)
where Wes = λsγ∗n. Black [12] performed an asymptotic analysis for kx � 1, ε� 1,
and Wen � 1 and computed the critical nominal Weissenberg number as a function
of Wes and s, the results of which are reproduced in Fig. 13. Clearly, the critical
values are insensitive to the time dependence of the structural rearrangement at the
wall unless the kinetics are very slow. As the rate of interchange of material at the
surface slows, the flow becomes more stable, since, as Wes becomes large, DXDt→ 0,
X → constant, and us ∝ τyx, which is a stable case, as shown previously. The
remainder of the calculations are presented for Wes = 0, which simplifies the slip
model to us = εs(tr τ )τyx.
Analytical results for the network model with the UCM equation, Eq. 11 with
µ = 0, as the constitutive equation are considered first. Only the spatially decaying

45
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
101
102
s
10
100
We n
,c
Wes = 0.1Wes = 1Wes = 10Wes = 100
Unstable
Stable
Figure 13: Critical Weissenberg number as a function of s for several values of Wesfor the network slip model.
solutions to Eq. 90 are retained in the derivation of the eigenvalues, in effect ignoring
the presence of the upper boundary. This is a very good approximation for large kx,
due to the localized boundary layers. Application of the boundary conditions results
in a fourth order polynomial for the eigenvalues which can be solved numerically.
Fig. 14 shows neutral curves for plane Couette flow, plotted as the critical applied
Stable
Unstable
Increasing wavelength
101
102
103
104
10-13 10-11 10-9 10-7 10-5 10-3
εs
We n
,c
Figure 14: Critical Wen as a function of εs for the UCM equation and the net-work slip model, keeping only the decaying eigenfunctions. ( ) - kx = 105,(— — —) - kx = 100, and (– – – – –) - kx = 1.

46
flow rate for instability, Wen,c, versus the slip coefficient, εs. As the limit of no-
slip boundaries is approached, εs→ 0, the critical Weissenberg number approaches
infinity as Wen,c ∼ (εs)−1/4. At high enough values of εs, the flow again becomes
unconditionally stable, approaching the singularity as Wen,c ∼ (2.06× 10−4− εs)−1.
When εs � 2.06 × 10−4, a high enough stress to cause the instability cannot be
generated in the fluid, due to the large slip velocities. The different lines in each
graph also show that the flow is more stable for longer wavelength disturbances.
In fact, the most unstable disturbance is that corresponding to kx → ∞, and this
disturbance also has the highest growth rate, as shown in Fig. 15. However, the
102
103
104
105
106
kx
−0.0001
0
0.0001
0.0002
Im(k
x c)
Figure 15: Growth rate versus wavenumber for the UCM equation and the networkslip model with the following parameters: Wen = 11.62, Wet = 11, and εs = 10−5.
growth rate remains bounded as kx → ∞; therefore, the model is mathematically
well-posed. A nonzero, but bounded growth rate as kx → ∞ is also found in the
analysis of interfacial instability of viscoelastic two-layer flow [83]. Fig. 16 shows
a typical analytical eigenvalue spectrum. A numerical spectrum is also shown and
will be discussed below. There are four discrete eigenvalues and a continuous set
along the line c = γy + us − i/(kxWen). Only four discrete eigenvalues are found
analytically, even though one would expect the spectrum to be symmetric across

47
0 0.2 0.4 0.6 0.8 1Re(c)
−0.20
−0.15
−0.10
−0.05
0.00
0.05
Im(c
)
Figure 16: Typical eigenvalue spectra obtained analytically and numerically. The+ symbols and the dashed line indicate the analytical eigenvalues, while the circlesand the solid line indicate the numerical spectrum. The parameters are kx = 5,εs = 10−5, Wen = 17.341, Wet = 15, and for the numerical results, N = 256.
the centerline of the channel, y = 0.5, because only the spatially decaying solutions
to the stream function were kept in deriving the eigenvalues. Replacing F = tr τ
by F = 2 τ 2yx in the slip model leads to the same steady slip behavior but never to
instability, consistent with the asymptotic result that flow with only shear stress
dependent slip is stable. Finally, Fig. 17 shows neutral curves for plane Couette
flow and the anisotropic drag slip model. Comparison of these curves with those for
the network model shows that the stability results are virtually identical for these
two models.
3.4.2 Numerical Method
To gauge the effect of nonlinear viscoelasticity, numerical solutions to the PTT
equation must be obtained. Chebyshev collocation is used to set up a generalized
matrix eigenvalue problem. Chebyshev collocation falls under a general class of
numerical methods for boundary value problems known as the method of weighted

48
10−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
ερ
10
100
We
Stable
Unstable
n,c
Figure 17: Semi-analytical neutral curves for the plane Couette flow of the UCMfluid with the anisotropic drag slip model. ( ) - kx = 100, (— — —) - kx = 1.For both curves, ρ = 0.1.
residuals [17]. For a general, linear, nonhomogeneous problem with operator L,
Lu(ξ) = f(ξ), (28)
a solution can be proposed in terms of the basis functions, φi(ξ),
uN(ξ) =N∑i=0
aiφi(ξ), (29)
where uN is an approximation to the true solution. The residual, defined by
R(ξ) = LuN(ξ) − f(ξ), is a measure of the error of the approximation and should
be minimized in some fashion. The minimization is accomplished by requiring the
inner product of the residual with another set of functions, the trial functions ψi(ξ),
to be zero, i.e. 〈R(ξ), ψi(ξ)〉 = 0 for all ψi, i = 0, . . . , N . After substituting the
definition of the residual and rearranging, the MWR problem reduces to
〈Lφj , ψi〉aj = 〈f, ψi〉. (30)

49
Everything in this equation is known, except for the vector of coefficients, aj . This
is just a standard system of algebraic equations to solve. For a Chebyshev collo-
cation technique, the basis functions are taken to be Chebyshev polynomials and
the trial functions to be Dirac delta functions. This forces the residual to be zero
at the collocation points. Solution of Eq. 30 then gives the values of the expansion
coefficients.
However, knowledge of the expansion coefficients is not required to discretize
the differential equation. All of the information about the solution is contained in
the values of uN at the collocation points. To see this, let ξi = ξ0, . . . , ξN be the
chosen set of collocation points. Eq. 29 can be evaluated at all of the collocation
points to give a system of equations, written in matrix form as
uN(ξ0)
...
uN(ξN)
= uNi =
φ0(ξ0) · · · φN(ξ0)
......
...
φ0(ξN) · · · φN(ξN)
a0
...
aN
= Aijaj . (31)
The derivative of u can be approximated as (uN)′ =∑N
i=0 aiφ′i(ξ). The derivative
can be evaluated at all of the collocation points and the system of equations written
as (uN)′i = Adijaj. This relation can be combined with Eq. 31 to give (uN)′i =
AdijA−1jk u
Nk . The matrix (DN )ik = AdijA
−1jk is the Chebyshev derivative matrix
operator. It depends only upon the basis functions and collocation points used, not
the expansion coefficients or the differential equation.
Chebyshev collocation is employed in the interval ξ = [−1, 1]. The most common
choice for the collocation points is the Gauss-Lobatto points given by
ξj = cosjπ
N. (32)

50
For these points, the derivative matrix takes on a very simple form
(DN)ik =
ai(−1)i+k
ak(ξi−ξk)i �= k
−ξk2(1−ξk 2)
1 ≤ i = k ≤ N − 1
2N2+16
i = k = 0
−2N2+16
i = k = N
. (33)
The range for the present problem is y = [0, 1] rather than [−1, 1]. The mapping
yj →12(1 + ξj) maps the typical interval onto the computational interval for this
problem. Derivatives with respect to y are replaced by d/dy → (dξ/dy)d/dξ =
2 d/dξ. Fortunately, this mapping only results in the derivative matrix being scaled
by a factor of 2. This choice of collocation points is also beneficial in that the points
are distributed nonuniformly in the region of interest. Specifically, the points are
more densely placed near the walls and more sparsely placed near the center of the
channel. The disturbance eigenvectors are expected to be localized near the wall,
so the points are arranged precisely where they are needed for the calculations.
The formulation of the numerical problem is slightly different than the formu-
lation for the analytical results. Instead of being reduced to one general equation,
the system of equations for the amplitude functions, Eqs. 87a - 87f , is written
in terms of four independent variables: the two normal stresses, the shear stress,
and the stream function. Pressure is eliminated by taking the curl of the equation
of motion. There are two reasons for this choice. The operator M in Eq. 89 is
extremely unwieldy, and more importantly, the general stability equation contains
fourth order derivatives, which leads to an extremely stiff system of equations after
discretization and makes reliable solutions impossible to obtain.

51
The generalized eigenvalue problem for the PTT equation is
ikxWen c Ca = La (34)
where a = (ψ, τxx, τyx, τyy) and the operators L and C are shown in Appendix A.3.
Discretization gives 4(N + 1) unknowns, which are the values of the independent
variables at the collocation points. The discretized eigenvalue problem is solved
using a public domain routine, namely the Transactions on Mathematical Software
(TOMS) routine 535 [23]. This routine returns all of the eigenvalues, allowing
the entire spectrum to be analyzed. To remove spurious eigenvalues, boundary
regularization, as discussed by Graham [28], is used.‡
3.4.3 Numerical Results
The analytical solutions for the UCM fluid presented in §3.4.1 can be used to validate
the numerical technique. Fig. 18 compares growth rate curves obtained numerically
using the Chebyshev technique and analytically using the spatially decaying solu-
tions. The number of collocation points, N , is 256. At large kx, numerical results
are not presented, due to the fact that the continuous spectrum becomes spuriously
unstable above kx ≈ 20. At moderate wavenumbers (kx ≈ 10), the eigenvectors are
localized near the plates, the analytical solutions are still accurate, and the numerics
agree with the analytical solution. At small kx, the curves diverge, as the eigenvec-
tors are no longer localized enough for the analytical solution to be accurate. The
neutral curve for kx = 10 is shown in Fig. 19 for the network model. The points
were obtained using the Chebyshev method while the solid curve is the analytical
‡Boundary regularization was used to remove spurious modes for the results published inRef. [14] and, therefore, was mentioned here. A much better method for eliminating spurious

52
0 5 10 15 20kx
−0.0045
−0.0025
−0.0005
0.0015
Im(k
x c)
Figure 18: Comparison of the growth rate curves predicted numerically and analyt-ically for the UCM equation and the network slip model. Wet = 15, Wen = 17.341,εs = 10−5, and for the numerical solutions, N = 256.
result. As expected, these curves are in excellent agreement, as is the predicted
eigenvalue spectrum, also shown in Fig. 16. The numerical spectrum shows four
pairs of eigenvalues, since the numerical technique obtains all of the solutions to the
general stability equation, and the continuous spectrum appears as a ring since the
eigenvectors corresponding to the continuous eigenvalues are singular and poorly
approximated by polynomials (c.f. Graham [28]). The poor approximation of the
continuous spectrum leads to the spuriously unstable behavior of the continuous
spectrum alluded to earlier for large kx. Other spurious behavior is possible, most
notably, the ring can be large enough in some instances to overlap with and obscure
the discrete eigenvalues.
For the PTT constitutive equation, only numerical solutions are possible. We
chose small values of µ(= 10−4, 10−3) since Phan-Thien and Tanner [69] reported
good fits of experimental data for a low density polyethylene with µ = 10−3 and
pressure modes is to use a primitive variable formulation coupled with a staggered grid for pres-sure (c.f. §5.2.1). Use of a primitive variable formulation similar to the one in §5.2.1 gives identicalresults to the streamfunction formulation with boundary regularization for this problem.

53
10−8
10−7
10−6
10−5
10−4
10−3
ε
10
100
We
s
n,c
Stable
Unstable
Figure 19: Numerical and analytical neutral curves for the UCM equation and thenetwork slip model with kx = 10. For the numerical results N = 192.
we wish to examine small deviations from the UCM equation. Fig. 20 shows the
neutral curves for kx = 1 and 10 when the network model is used as the slip relation.
10−8
10−7
10−6
10−5
10−4
ερ
10
100
1000
We n
,c
Stable
Unstable
εs
Figure 20: Neutral curves for the PTT constitutive equation with the network modelas the slip relation. © - kx = 1, µ = 10−3; 3 - kx = 1, µ = 10−4; � - kx = 10,µ = 10−3; 2 - kx = 10, µ = 10−4. For all curves, N = 192.
Increasing µ increases the slope of the power law region at small εs. At higher εs
the singularity is still present, but the location depends upon µ. In fact, the curves
cross and the curves for higher µ are less stable. At the shear rates required for

54
instability, shear thinning is just beginning to set in, but small changes in the stress
greatly affect the slip velocity, since at steady state us ∝ τ3yx. So, at a given εs
and applied flow rate, the slip velocity for the PTT model is reduced relative to the
slip velocity for the UCM model and this leads to higher shear rates and stresses
in the fluid for the same nominal We. Higher stresses can be maintained in the
fluid allowing the critical stress to be reachable for larger εs and Wen leading to less
stability. Finally, neutral curves for the PTT equation and the anisotropic drag slip
model are shown in Fig. 21. In contrast to the UCM case, comparison of Figs. 20
and 21 reveals that there is a significant difference in the neutral curves when the
10−8
10−7
10−6
10−5
10−4
10−3
10−2
ερ
10
100
We n
,c
Stable
Unstable
Figure 21: Numerical neutral curves for the PTT constitutive equation with theanisotropic drag slip model. © - kx = 1, 3 - kx = 10. For both curves, µ = 10−4,N = 192, and ρ = 0.1.
slip model is changed. In particular, the location of the singularity at large ερ
is shifted to higher value of ερ for the anisotropic drag slip model as opposed to
the network model, dramatically destabilizing the flow at large values of the slip
coefficient.
For comparison with the asymptotic results, as well as experimental evidence

55
and other slip theories, the results here can be recast in terms of the extrapolation
length, b = us/γ. The extrapolation length is given by Eq. 15 with f = εsτxx for
the network model and f = ε(1 + ρτxx − ρ2τ2yx) for the anisotropic drag model.
Interestingly, a master curve can be plotted as the true shear stress, i.e., the true
Weissenberg number, versus the scaled wavenumber kxb, as shown in Fig. 22 for both
the UCM and PTT constitutive equations. The two sets of points are numerical
results for the PTT constitutive equation obtained using the Chebyshev method
10−3
10−2
10−1
100
101
102
103
kx b
10
100
1000
τ yx,c
/G*
UCM; NetworkUCM; ADPTT; NetworkPTT; AD
Unstable
Stable
*
Figure 22: Master curve of kxb versus Wet for the network model.
while the solid curves are the analytical results for the UCM equation on a half-
plane. All of the data fall roughly onto one curve and predict a basically constant
critical shear stress (recoverable shear) of ≈ 11 for kxb � 1. All wavelengths shorter
than the extrapolation length have essentially the same growth rate and wave speed
(= us) and the flow is more stable for disturbance wavelengths greater than the
extrapolation length (kxb < 1). This is in agreement with the asymptotic result
for large wavenumbers where stability only depended upon R0, not kx or b. In an
actual extrusion process, wavelength selection should be strongly influenced by the
fluid mechanics near the die exit, which are not directly addressed here, as well as

56
by molecular dynamics occurring on fast time scales that are not included in the
models. Other possibilities arise when considering more complicated constitutive
behavior( both bulk and interfacial), where physical mechanisms such as reptation
and disentanglement are included (Wang et al. [100], Mhetar and Archer [55], Ajdari
et al. [3]). In any case, the longest wavelength observed would be on the order of
the extrapolation length (i.e., kxb = 1).
The solutions presented in this section qualitatively predict aspects of sharkskin
other than those already predicted by the asymptotic results. Most importantly,
these solutions show that slip can be stabilizing or destabilizing in Couette flow, de-
pending upon the magnitude of the slip velocity. For small slip velocities, increasing
the magnitude of slip destabilizes the flow by decreasing the critical stress for the
instability. At large enough values of the slip coefficient, the critical stress for insta-
bility becomes a constant and further increasing the magnitude of slip stabilizes the
flow by reducing the effective shear rate in the fluid. If the magnitude of slip is large
enough, the critical stress required for instability cannot be obtained and the flow
becomes stable for all We. These results are robust with respect to the exact form
of the slip model and to the constitutive equation used. Care must be exercised
in extrapolating these conclusions to pressure driven flow. The shear stress at the
wall is determined solely by the imposed pressure drop, not the shear rate. It is
always possible to achieve the critical stress, so it is not correct to associate the
substantially increased shear rate with flow stabilization.
3.4.4 Comparison with experiment

57
This analysis leads to several quantitative predictions which can be checked against
experimental evidence. First, the slip models considered here predict that the slip
velocity has a power law dependence on the shear stress in the base state, with a
power law exponent of 3. This value agrees very well with published data for HDPE
(Hatzikiriakos and Dealy [34, 33]). Values for LLDPE range anywhere from 4 to 6
(Hill et al. [38]), so the predicted power law exponent is low. Second, information
about the molecular weight and temperature dependence can be obtained. We
find a critical true Weissenberg number Wet,c for instability that is constant when
kxb � 1. Thus the critical shear rate is
γt,c∗ =
Wet,cλ
. (35)
Generally, the relaxation time strongly decreases with temperature, following an
Arrhenius relation, and strongly increases with molecular weight (MW) [19], e.g.
λ ∼ MW 3.4 for entangled melts, so that the critical shear rate increases sharply
with temperature and decreases with the molecular weight. Venet and Vergnes [96]
have recently shown for LLDPE that the critical shear rate increases as a function
of temperature with a rate much faster than linear, and it is well known that
higher molecular weight polymers are more susceptible to sharkskin distortions.
The predicted critical recoverable shear, τyx,c∗ /G∗ = Wet,c, is a constant, as observed
by Pomar et al. [73], who diluted LLDPE with octadecane to lower the modulus and
found that sharkskin set in at a recoverable shear of 1.73 for a wide range of polymer
weight fractions. Since G∗ ∝ T , we also find that τyx,c∗ /T is a constant at onset, in
agreement with the experiments of Venet and Vergnes [96] and Wang et al. [100]
The longest wavelength observed will be for kxb ∼= 1, for which the frequency of
the distortion is ω∗c = k∗xRe(c∗) ∼= k∗xu
∗s = k∗xb
∗γ∗n = kxbWen/λ ≈ 11/λ, which scales

58
as the reciprocal of the bulk relaxation time, as seen experimentally for LLDPE
by Wang et al. [100] and Barone et al. [8] Finally, the critical recoverable shear
predicted by the model is around 10. Several experiments have reported critical
stresses for sharkskin in LLDPE around 0.1 MPa. For Ramamurthy’s [75] data, in
particular, this gives a recoverable shear of about 8, so the slip results are within
the correct order of magnitude.
3.5 Mechanism
An energy analysis was performed in order to elucidate the cause of the instability. It
is desirable to have a molecular level picture of what is happening at the interface to
destabilize the flow. This has not been fully realized of yet, but the energy analysis
points to the important terms in the equations, and establishes criteria that any
proposed mechanism must fulfill.
In order to do an energy analysis, one wants to follow the evolution of energy or
an energy-like, i.e. a real, positive definite, quantity. The L2 norm of the solution is
used here, and this quantity can be derived starting from the linearized component
equations of the UCM constitutive equation for the asymptotic case, kx ∼ 1/ε� 1,
y = kxy, Wen = Wet. For this scaling, the critical Wen is Wen,c = 10.669 for s = 1.
The scaled stress equations are
∂τxx
∂t+ u
∂τxx
∂x− 2(1 + τxx)
∂u
∂x− 2τyx
∂u
∂y− 2τyx
∂u
∂y+
1
Wenτxx = 0, (36)
∂τyx
∂t+ u
∂τyx
∂x− τyy
∂u
∂y−
∂u
∂y− (τxx + 1)
∂v
∂x+
1
Wenτyx = 0, (37)
∂τyy
∂t+ u
∂τyy
∂x− 2τyx
∂v
∂x− 2
∂v
∂y+
1
Wenτyy = 0, (38)

59
where the barred variables denote the base state and now the unmarked variables
are the perturbations. The perturbations are written in normal mode form as
a = a + a∗, where a = a(y, t)eikxx and the complex conjugate a∗ = a∗(y, t)e−ikxx.
The time dependence has not been explicitly included yet. With these definitions,
Eq. 36 becomes
∂
∂t(τxx + τxx
∗) + ikxu(τxx − τxx∗)− 2(τxx + 1)ikx(u− u∗)− 2τyx(u
′ + u′∗)−
2(τyx + τyx∗) +
1
Wen(τxx + τxx
∗) = 0. (39)
Note that all the terms in this equation are real. The next step is to multiply the
entire equation by (τxx + τxx∗) and then integrate over x and y. This yields
1
2
∂
∂t〈(τxx + τxx
∗)2〉 = −iu〈(τxx − τxx∗)(τxx + τxx
∗)〉+
2i(τxx + 1)〈(u− u∗)(τxx + τxx∗)〉 −
1
Wen〈(τxx + τxx
∗)2〉+
2τyx〈(u′ + u
′∗)(τxx + τxx∗)〉+ 2〈(τyx + τyx
∗)(τxx + τxx∗)〉, (40)
where the brackets denote the double integration. This equation can be further
simplified to give
∂
∂t〈〈τxxτxx
∗〉〉 = 2i(τxx + 1)〈〈uτxx∗ − u∗τxx〉〉 −
2
Wen〈〈τxxτxx
∗〉〉+
2τyx〈〈τxxu′∗ + τxx
∗u′〉〉+ 2〈〈τxxτyx∗ + τxx
∗τyx〉〉, (41)
where the double bracket indicates integration over y, and the integration over x
has been implicitly performed. There are a couple of points to notice. First, since
the goal is to determine the important terms at the onset of instability, Im(c) is
zero, and c is a purely real quantity. Since every term in Eq. 41 contains a variable
multiplied by the conjugate of another, and the perturbations can be written as

60
a(y)e−ikxct, the time dependence will cancel out of every term, and each term will
only be a function of y. Therefore, only the amplitude functions that were calculated
earlier are needed. Second, because the time dependence cancels out of the left hand
side of the equation at the onset of instability, the time derivative will be zero, and
this fact provides a simple check on the calculations. The other two components
of the constitutive law can be reduced the same way. When all three resulting
equations are added together, the result is one equation for the time rate of change
of an energy-like quantity
∂
∂t〈〈τxxτxx
∗ + τyxτyx∗ + τyy τyy
∗〉〉 = 2i(τxx + 1)〈〈uτxx∗ − u∗τxx〉〉+
2τyxγ〈〈τxxu′∗ + τxx
∗u′〉〉+ 2〈〈τxxτyx∗ + τxx
∗τyx〉〉 −
2
Wen〈〈τxxτxx
∗〉〉+ (τxx + 1)i〈〈vτyx∗ − v∗τyx〉〉+
γ〈〈τyxτyy∗ + τyx
∗τyy〉〉+ 〈〈τyxu′∗ + τyx
∗u′〉〉 −
2
Wen〈〈τyxτyx
∗〉〉+ 2iτyx〈〈vτyy∗ − v∗τyy〉〉+
2〈〈τyyv′∗ + v′τyy
∗〉〉 −2
Wen〈〈τyy τyy
∗〉〉. (42)
A very similar equation can be derived from the exact forms of the component
equations so that the analysis can be extended to the no-slip case (Gorodtsov and
Leonov solution). This equation is not shown for brevity. The parameters are chosen
to correspond with the asymptotic result, Wen = 10.7, kx = 100. Table 4 shows the
values of the terms in Eq. 42 obtained for both the destabilizing slip mode and the
Gorodtsov-Leonov mode for the no-slip case as well as the constitutive component
that the terms are from. Note that the terms for the slip case sum to zero,
validating the calculations, but that the terms for the no slip case do not. This is
because the slip case is calculated at the onset of instability, where the Im(c) is zero,

61
τxx
τyx
τyy
Term Slip No-slip (G-L)
2i(τxx + 1)〈〈uτxx∗ − u∗τxx〉〉 11003.4 -3045.31
2τyx〈〈τxxu′∗ + τxx
∗u′〉〉 17078.6 3814.9
2γ〈〈τxxτyx∗ + τxx∗τyx〉〉 44857 45114.2
− 2Den〈〈τxxτxx∗〉〉 -72939 -101921
i(τxx + 1)〈〈vτyx∗ − v∗τyx〉〉 237.622 -23.6812
γ〈〈τyxτyy∗ + τyx∗τyy〉〉 4624.58 62.4942
〈〈τyxu′∗ + τyx
∗u′〉〉 -90.645 6.61066
− 2Den〈〈τyxτyx∗〉〉 -4771.55 -100.899
2iτyx〈〈vτyy∗ − v∗τyy〉〉 20.6294 -.0066018
2〈〈τyyv′∗ + v′τyy
∗〉〉 19.2603 .2046562
Den〈〈τyy τyy∗〉〉 -39.8897 -.439934
Table 4: Comparison of the results for slip and no-slip.
but there is no point where the Im(c) is zero for the no-slip case, since the flow with
no slip is unconditionally stable. This means that the the time exponential does
not cancel out of the terms in the no-slip case. Instead, every term is multiplied
by the factor eikx(c−c∗)t. The calculations were done with the implicit assumption
that t = 0, thereby dropping that factor out. By this method, the largest terms are
the coupling terms between the base state velocity gradients and the perturbation
stresses. However, the effect of this coupling is the same in both cases, even though
destabilizing, and cannot cause a fundamental change in the stability. Also, the
viscous terms (terms containing the reciprocal of the nominal Deborah number) are
very large in absolute value and stabilizing, but, again the behavior is the same in
both cases. The crucial terms are those describing the coupling between the base
state stresses and the perturbation velocity gradients, τ · ∇v. This implies that

62
velocity perturbations further stretch and orient chains, which leads to increased
slip, leading to build up of the instability.
The same coupling behavior is seen in a phase shift between the perturbation
slip velocity and the perturbation stresses, as shown in Fig. 23. Such a phase shift
is impossible in the absence of a τxx dependence of the slip coefficient unless a
0 10 20 30t
−1.5
−1.0
−0.5
0.0
0.5
1.0
1.5
τ xx, τ
yx, u
τxxτyx u^ ^ ^
^^
^
Figure 23: Phase shift between the slip velocity and the shear and normal stresscomponents at the critical point. ( ) - τxx, (– – – – –) - τyx, and (— — —)- u. The parameter values are kx = 10, εs = 10−5, Wen,c = 14.77, Wet,c = 13.36, andRe(c) = 0.04944, and the amplitudes have been normalized to unity.
“memory slip” model like Eq. 1 is used. Instability is never observed in the absence
of a phase shift (R0 = 0 in the asymptotic analysis). The fact that the memory
slip model also leads to instabilities suggests that the phase shift is an essential
component of the mechanism.
3.6 Summary of the Melt Analysis
Slip models which include a normal stress dependence of the slip velocity lead to
novel shortwave hydrodynamic instabilities in inertialess, viscoelastic parallel shear

63
flows. Analysis of flows with these slip models makes several predictions consistent
with experimental observations of sharkskin. Most significantly, this model pre-
dicts a short wavelength instability at zero Reynolds number that is localized near
the bounding surfaces. This instability is found even though the flow curves are
monotonic increasing and the model is mathematically well-posed at all wavenum-
bers. Both viscoelasticity and normal stress dependent slip are necessary for the
instability to occur. The onset conditions depend upon bulk polymer properties,
in particular the relaxation time, as well as the interfacial ones, although the pre-
dictions are not sensitive to the functional form used to describe slip. The model
predicts that slip can be stabilizing or destabilizing in Couette flow, depending upon
the flow parameters. The neutral curve goes through a minimum as the degree of
slip increases from zero, after which the critical Weissenberg number rapidly in-
creases and the neutral curve becomes singular. Beyond this point the slip velocity
is so large that high enough stresses to cause the instability cannot be generated
in the fluid and Couette flow is unconditionally stable. Replotting the neutral
curves as the critical true Weissenberg number (the dimensionless shear stress) ver-
sus the wavenumber scaled with the extrapolation length yielded a master curve.
The critical Weissenberg number is on the order of 10, which is the same order
of magnitude as observed experimentally, and predictions of the critical shear rate
and molecular weight and temperature dependencies are in qualitative agreement
with experiments. The results are robust with respect to the actual forms of the
interfacial and bulk constitutive relations employed. Finally, the mechanism must
be tied to the phase shift between the perturbation slip velocity and the perturba-
tion shear stress, as this phase shift is only present in normal stress dependent slip

64
models or memory slip models. This analysis is the only analysis which predicts
hydrodynamic instabilities consistent with sharkskin, and highlights the importance
of including chain stretching and orientation effects in models for slip.
A primary limitation to the results presented here is the model geometry used
in the analysis, which does not approximate the real flow situation during extru-
sion. The question naturally arises of whether similar elastic instabilities are seen
in viscometric flows. One possible answer was provided in the context of entangled
polymer solutions by Mhetar and Archer [56], who observed enhanced concentration
fluctuations in a plane Couette cell. The slip behavior of the solution clearly influ-
ences the onset of instability in this system, but the analysis is more complicated
due to coupling between the polymer stress and the concentration in these systems.

65
Chapter 4
Concentration Fluctuations in
Semidilute Polymer Solutions
A recent experimental study by Mhetar and Archer [56] has demonstrated several
novel features of shear enhanced concentration fluctuations in entangled polymer
solutions. They studied flows of semidilute solutions of polystyrene (PS) in di-
ethylphthalate (DEP), to which tracer particles were added to measure the velocity
profile, using a planar Couette cell. Two features of the flow of these solutions stand
out. First, slip occurs at the polymer/solid interface at low shear stresses where no
turbidity was observed. Enhanced concentration fluctuations were observed at large
shear stresses, where the slip velocity was a strong function of the shear stress, as
shown in Fig. 24 for a 20 wt% solution. The extrapolation, or slip, length measured
for these solutions was found to be on the order of 10 µm, which is the same as the
length scale for the fluctuations themselves. Second, the concentration fluctuation
enhancement started near the boundaries and modification of the surface to increase

66
Figure 24: Enhanced concentration fluctuations in a semidilute solution ofpolystyrene in diethylphthalate at a shear rate of 3.5 s−1. Reprinted from Mhetarand Archer [56].
slip delayed the onset on fluctuations to much larger shear stresses. These obser-
vations strongly suggest that slip plays a role in the formation and development of
these fluctuations.
Shear enhanced fluctuations in semidilute polystyrene solutions have been stud-
ied previously, typically via light scattering measurements. There are two typical
experimental configurations, which differ primarily in the direction of illumination.
The two possibilities are shown schematically in Fig. 25. Hashimoto and cowork-
ers [31, 32, 63, 46] have performed a series of experiments using solutions of PS
dissolved in dioctylphthalate (DOP) sheared in a cone and plate rheometer [31]
through which laser light was shined along the velocity gradient direction. The
average scattering intensities in the flow and normal directions were computed and
a typical result is shown in Fig. 26. At low shear rates, γ∗n, the scattering intensity
was low and uniform. At γ∗n > γ∗c , the scattering intensity increased dramatically

67
y
x
z
Flow direction
(a)
(b)
Figure 25: Schematic of typical light scattering experiments. The dashed arrowsshow the two possible directions for illumination: (a), the velocity gradient direction,which samples the near surface regions, and (b), the neutral direction, which onlymeasures scattering in the bulk.
Figure 26: Scattering intensity as a function of shear rate normalized by the equi-librium intensity for a 6wt% PS solution. The molecular weight of the PS was 5.48×106. Reproduced from Kume et al. [46].

68
Figure 27: Scattering pattern as a function of the shear rate for the same solutionas in the previous figure. In (a), the anisotropic peak is just visible. As the shearrate increases, the intensity increases and the peak shape becomes more defined.Reproduced from Hashimoto and Kume [32].
and the scattering pattern became anisotropic, as shown in Fig. 27, with a broad
scattering peak in the flow direction and a narrow dark streak perpendicular to
the flow direction. This “butterfly” pattern indicates the formation of flow struc-
tures which are elongated roughly perpendicular to the flow direction so that the
wavevector of the fluctuations is roughly oriented in the flow direction. The length
scale for these structures can be estimated from the patterns and is on the order of
10 µm. The critical shear rate for the formation of these anisotropic structures is
γ∗c ≈ 1/λ, where λ is the polymer relaxation time. This gives a critical Wen(≡ λγ∗)
of about 1.
Scattering measurements have also been performed with illumination along the
neutral, or vorticity, direction, with somewhat different results. Wu et al. [105] used
a circular Couette device with Pyrex cylinders, and observed anisotropic butterfly
patterns. The angle of maximum scattering at low shear rates was not in the flow
direction; instead, the scattering pattern was tilted at an angle of about 40◦. This
pattern was already visible at a shear rate of 0.4s−1 (Wen ∼ 0.2). The scatter-
ing peak rotated clockwise (towards the flow direction) and the magnitude of the
wavevector decreased as the shear rate was increased. The initial wavenumber for

69
this peak was ∼ 10µm−1, giving a wavelength for the underlying waves of ∼ 1µm.
At high shear rates, the pattern had rotated so that the peak was below the x-axis.
Similar behavior was reported by Wirtz [104] for a slightly more concentrated so-
lution, although the measured wavenumber was much smaller than that observed
by Wu et al. [105]. In addition, Wirtz reported that the peak initially moved away
from the origin at low shear rates. This behavior was not reported by Wu et al.,
nor is it predicted by any of the theories described below.
The seminal theory on a purely hydrodynamic mechanism of enhanced concen-
tration fluctuations was initially proposed by Helfand and Fredrickson [36] (HF)
and later extended by several authors [59, 60, 41, 91]. This mechanism is based on
the idea that variations in polymer stress can drive a flux of polymer molecules
– indeed, several authors [41, 60, 54] have developed simple, two-fluid models
which demonstrate quite generally that the polymer flux, j, for a dilute solution
is j = −Dtr∇n + (Dtr/kBT )∇ · τ , where n is the polymer number density, τ is
the polymer extra stress tensor, Dtr is the polymer translational diffusivity, kB
is the Boltzmann constant, and T is the temperature. Furthermore, a detailed
kinetic theory derivation [18] leads to a very similar expression for the flux. A
physical description of the basic mechanism was elucidated by Milner [59] and Ji
and Helfand [41] and is shown in Fig. 28, which shows a random fluctuation with
wave vector k. The regions of higher concentration (the dark regions) have larger
stresses. If the angle of the wave vector with respect to the x-axis, β, is in the sec-
ond quadrant, as in Fig. 28(a), the shear stresses set up net forces on the molecules
such that the molecules are driven from the regions of high concentration to regions
of low concentration, thereby increasing the effective rate of diffusion. For β in the

70
(a) (b)
kk
Figure 28: Physical picture of the HF hydrodynamic mechanism for enhanced con-centration fluctuations. The wave vector of the fluctuation is such that in: (a)the net force on molecules pushes molecules from regions of high concentration toregions of low concentration; (b) the net force on molecules pulls molecules intoregions of high concentration from regions of low concentration. Adapted from Jiand Helfand [41]
first quadrant, as in Fig. 28(b), the resulting net force on molecules pulls molecules
from low concentration regions into higher concentration regions. This enhances
fluctuations by decreasing the effective rate of diffusion or by overcoming diffusion
altogether. HF predicted the maximum angle of scattering to be ∼ 41◦ at low shear
rates, which is close to the value measured by Wu et al. [105]. If fluctuations are
short enough, diffusion is faster than stress relaxation and the HF mechanism is sup-
pressed [59]. A scattering peak occurs when the diffusion and relaxation times are
equal, which occurs at a wavenumber of k = (Dtrλ)−1/2. This gives a characteristic
length scale for fluctuations of√Dtrλ.
This length scale was observed in the earlier light scattering experiments at
low shear rates. For the experiments of Hashimoto and coworkers, the relaxation
time can be estimated as the reciprocal of the shear rate for the onset of shear
thinning [46] and using the diffusivity measured by Wu et al. [105] for a similar
system gives a predicted wavenumber of k ≈ 0.7µm−1, which is close to the measured

71
value. This length scale was also observed by Wu et al. [105], who found a scattering
peak at kx ≈ 10µm−1, which is in good agreement with their predicted value of
9.4µm−1.
Even though both of these experiments show peaks at the requisite length scale,
qualitative differences exist in the shear rate dependence of the results. In particular,
Hashimoto and coworkers, who measured the intensity essentially averaged over
a volume containing both near surface regions, found that the intensity increased
markedly above a critical shear rate, which was roughly the reciprocal of the polymer
relaxation time. If fact, for a factor of ten increase in the shear rate above the
critical value, the scattering intensity increased one hundred fold. Conversely, Wu
et al., who measured the scattering in the bulk, completely missing the surface
regions, found a much smaller increase in intensity as the shear rate was increased,
approximately an 11-fold increase in scattering intensity for a 25-fold increase in
shear rate.
This difference is not surprising, as fluid mechanics results suggest that the dy-
namics near surfaces should be different than dynamics in the bulk. Gorodtsov and
Leonov [27] analyzed the plane Couette flow of a UCM fluid and found that, while
always stable in the absence of inertia, the slowest decaying modes are localized
near the bounding surfaces. As a result, one would expect the formation of bound-
ary localized structures due to random concentration fluctuations in the polymer
solution. In addition, slip leads to boundary-localized instability in simple shear
flows, as shown in Ch. 3. Taken in whole, the experiments suggest that the basic
HF mechanism, while being able to explain bulk behavior, only partially accounts
for the physics leading to enhancement of fluctuations near surfaces. The goal of

72
the next chapter is to analyze the coupling between concentration, stress, and slip
to elucidate the effects of boundaries on the dynamics.

73
Chapter 5
Concentration Fluctuations and Flow
Instabilities in Sheared Polymer
Solutions†
5.1 Formulation
The experimental results outlined in Ch. 4 clearly point to the importance of
polymer-surface interactions in determining the evolution of the flow of polymer
solutions. In particular, the experiments of Mhetar and Archer [56] explicitly link
wall slip and the formation of enhanced fluctuations in simple shear, by demonstrat-
ing that: 1) substantial slip takes place at shear stresses and rates below those for
which enhanced fluctuations appear; 2) fluctuations are initiated near the surfaces;
and 3) surface treatments can delay the onset of enhanced fluctuations to larger flow
†The results in this chapter have been submitted for publication in Phys. Rev. Lett.

74
z*s�
��
���
������ u
*
����
����
b
*ly
x
γ *.
Figure 29: Plane Couette geometry showing slip between the solution and solidsurface. The flow is in the x-direction, y is the gradient direction and z is theneutral, or vorticity, direction. l∗ is the gap width, u∗s is the slip velocity, γ∗ is thetrue shear rate in the fluid, and b∗ = u∗s/γ
∗ is the extrapolation length.
rates. These facts constitute the primary motivation for the analyses presented in
this chapter.
Given that the majority of the experiments were performed in simple shear
geometries, the link between slip and the formation of enhanced concentration fluc-
tuations is studied in the plane Couette geometry shown in Fig. 29. The x-direction
is the flow direction, the y-direction is the gradient direction, and the z-direction
is the neutral, or vorticity, direction. The constitutive behavior of the solution is
described by a two-fluid theory derived by Beris and Mavrantzas [54] that has been
specialized to Hookean dumbbells [9]. Nondimensionalizing lengths with the charac-
teristic length√Dtrλ, the stresses with n∗0kT , where n∗0 is the average concentration
of the solution, the velocities with√Dtr/λ, time with λ, and concentration with n∗0

75
gives the following model equations
−∇p +∇ · τ + S∇2v = 0, (43a)
τ (1) + τ −∇2 (τ + nδ) + δ
Dn
Dt= nγ, (43b)
Dn
Dt= ∇2n−∇∇ : τ , (43c)
∇ · v = 0, (43d)
where τ is the polymer extra stress tensor, n is the polymer concentration, λ is
the polymer relaxation time, Dtr is the translational diffusivity of a dumbbell, and
S = ηs/ηp = ηs/(n∗0kTλ) is the ratio of the solvent viscosity to the polymer viscosity
at the average concentration of the solution, n∗0. The true shear rate in the fluid has
been used for the nondimensionalization, as opposed to the applied shear rate used
in Ch. 3 for melts, to take advantage of the fact that the master curve reported
in Fig. 22 in §3.4.3 relates the true Weissenberg number to the wavenumber and
to facilitate the solution technique outlined below. Eq. 43b is the polymer con-
stitutive equation and is a generalization of the upper convected Maxwell (UCM)
equation [10] which includes coupling between the concentration and stress as well
as a stress diffusion term. In most cases, this term is negligible [9], but here, the
flow structures of interest have a length scale set by the diffusivity. Eq. 43c de-
scribes the polymer concentration and explicitly includes the coupling of stress and
concentration gradients. Eqs. 43a and 43d describe conservation of momentum and
mass. This model is similar to those studied previously [36, 59, 60, 41], although
only Sun et al. [91] have included the diffusive term in Eq. 43b. Furthermore, all
earlier works have restricted themselves to bulk behavior and We(≡ λγ∗) < 1.

76
Specification of suitable boundary conditions for the velocity, stress, and con-
centration completes the model. The concentration satisfies the typical no-flux
boundary condition at the surfaces,
n · jn =∂n
∂y−
∂τyx∂x−
∂τyy∂y−
∂τzy∂z
= 0, (44)
where n is the outward unit normal, which states that mass cannot be lost through
the boundaries. The presence of the stress diffusion term in the constitutive equation
necessitates a stress boundary condition, which can be derived by rewriting Eq. 43b
can be rewritten in terms of the conformation tensor using the Kramers’ form of
the stress tensor [10], τ = 〈QQ〉 − nδ, as
∂〈QQ〉
∂t= −∇ · jQQ + 〈QQ〉 · ∇v + (∇v)T · 〈QQ〉 − 〈QQ〉+ nδ (45)
where Q is the orientation vector of a dumbbell, jQQ = v · 〈QQ〉 − ∇〈QQ〉 is the
conformation flux, and the remainder of the terms on the right hand side can be
thought of as volume source terms. Assuming that there are no sources or sinks for
the conformation tensor at the boundary (i.e. the walls are neutral) gives a no-flux
boundary condition for the conformation tensor:
∂〈QQ〉
∂y=
∂τ
∂y+
∂n
∂yδ = 0. (46)
All of the computations reported below use this boundary condition. Computations
performed with the classical UCM equation as the stress boundary condition [92]
showed no qualitative difference in the results. Finally, the last pieces to be specified
are the velocity boundary conditions. The normal component of velocity is given
by the no-penetration condition, v = 0, at both surfaces and the tangential velocity
component is given by a slip boundary condition at the interface. In Ch. 3 it

77
was shown that a slip model where the slip velocity depends on normal stresses
is required in order to find instability in polymer melts. Even though the slip
mechanisms in entangled polymer solutions are expected to be similar to those in
melts, a Navier slip boundary condition is used here, where the slip velocity is
proportional to the shear stress, us = ετyx(= b at steady state). This serves as a
point of reference for comparisons to the melt results and a prelude to including
more complicated slip relations.
5.2 Stability Analysis
The dynamics of concentration fluctuations were studied initially by employing a
linear stability analysis similar to that in Ch. 3. The steady state solution to
Eqs. 43a - 43d using Eq. 46 as the boundary condition is one dimensional and given
by
a = {u, v, w, τxx, τyx, τzx, τyy, τzy, τzz, n, p} (47)
={We(y + us), 0, 0, 2We
2,We, 0, 0, 0, 0, 1, 1},
with y ∈ [0,√Pe/We], where the Peclet number Pe = γ∗l∗2/Dtr. Small perturba-
tions are added to this base solution, a = a(y)+a(x, y, z, t), and the basic equations
are linearized with only the terms leading order in the perturbation retained. The
resulting set of 11 equations can be written in matrix notation as
CS∂a
∂t= −LS a (48)
where CS is a constant matrix with zero rows corresponding to the momentum and
constitutive equations and LS is a continuous spatial differential operator. These

78
operators are shown for completeness in Appendix B. The perturbations take the
normal mode form
a(x, y, z, t) = a(y)eik · xe−iσt + c.c. (49)
where k = (kx, 0, kz) is the wavevector of the disturbance in the x-z plane. Substitu-
tion of Eq. 49 into Eq. 48 yields a generalized eigenvalue problem for the eigenvalues
{σ} with associated eigenfunctions {a(y)}. The eigenvalues are, in general, com-
plex and if Im(σ) > 0 then disturbances will grow and the flow is unstable. Three
dimensional disturbances are considered because Squire’s theorem has not been
demonstrated for this model.
5.2.1 Numerical Method
The Chebyshev collocation technique outlined in §3.4.2 is insufficient for this prob-
lem for several reasons. First, the streamfunction formulation becomes extremely
stiff because the solvent term in the equation of motion leads to fourth derivatives
of the stream function (c.f. §3.4.2). Second, the concentration equation leads to
an additional strip of continuous spectrum, when Dtr = 0, which interferes with
the calculation of the discrete modes. For Dtr �= 0, the governing equations are no
longer singular and all of the eigenvalues are discrete. However, there are sets of
discrete eigenvalues which correspond to the continuous modes of the Dtr = 0 case
and are similarly difficult to resolve. This will be more clear below.
A modified Chebyshev collocation scheme, employing a three dimensional, prim-
itive variable formulation, was developed to solve the generalized eigenvalue problem
resulting from Eq. 48. The results in §3.4.3 show that, for the case of the PTT fluid

79
(and, therefore, the UCM fluid), the eigenfunctions are localized near the boundaries
and decay away from the surfaces for large wavenumbers. It was also shown that
accurate approximations were obtained analytically by retaining only the decaying
solutions to the general stability equation. This can be accomplished numerically by
solving the the governing equations on a semi-infinite domain (SID) and requiring
the eigenfunctions to decay to zero as y → ∞. We map y onto the computational
coordinate, ξ, using [17, 15]
y = L
(1 + ξ
1− ξ
), (50)
with {y, ξ |y ∈ [0,∞), ξ ∈ [−1, 1]}. As discussed by Canuto et al. [17], this mapping
is more robust than an exponential mapping and less sensitive to the value of the
map parameter, L. The map parameter is a measure of the degree of stretching of
the coordinates, i.e., it is the value of y which is mapped to the center of the com-
putational domain. Trial and error yielded an optimum value of the map parameter
of L = 0.1 for this problem. All of the results presented below use this value. This
technique is accurate for disturbances with wavenumber much larger than the re-
ciprocal of the gap width, k∗x � 1/l∗, as for the analytical solutions of §3.4.1, a
condition satisfied by the dominant wavenumber measured experimentally [56].
Spurious pressure modes in primitive variable formulations are well known and
described in detail by Canuto et al. [17]. These modes can be eliminated by ex-
panding pressure on a lower order grid. To balance the number of equations and
unknowns, the continuity equation is evaluated on the staggered grid. This requires
extrapolation of the pressure from the staggered to regular grid for evaluation of
the momentum equation and interpolation of the velocity components from the

80
regular to staggered grid for the evaluation of the continuity equation. The extrap-
olation formula is derived from the expansion for pressure in terms of Chebyshev
polynomials is
p(ξ) =N−1∑i=0
biTi(ξ) (51)
with the expansion coefficients given by
bi =2
πci
∫ 1−1
p(ξ)Ti(ξ)w(ξ) dξ, (52)
where
cj =
2 j = 0
1 j ≥ 1. (53)
The staggered grid points, given by, ξsi = cos((i+ 1
2)π
N
), with i = 0, . . . , N−1, are all
in the interior of the domain, so this integral can be evaluated by Gauss quadrature
to give
bi =2
Nci
N−1∑k=0
p(ξsk) cos
(j(k + 1
2)π
N
). (54)
This can be put back into the expansion for p and this polynomial evaluated at the
regular grid points to get
p(ξi) =2
N
N−1∑j=0
N−1∑k=0
1
cjp(ξsk) cos
(j(k + 1
2)π
N
)cos
(ijπ
N
)(55)
This gives the values of pressure at the regular grid points in terms of the pres-
sure values at the staggered grid points. To get the interpolation function for
the velocities, we start with the expansion in terms of Chebyshev polynomials,

81
v =∑N
i=0 aiTi(ξ), and solve for the expansion coefficients using Gauss-Lobatto
quadrature on the regular grid, since the domain includes the boundary points,
ai =2
Nci
N∑j=0
1
cjv(ξj) cos
(jkπ
N
), (56)
where
cj =
2 j = 0, N
1 1 ≤ j ≤ N − 1. (57)
Putting this back into the expansion and evaluating it at the staggered grid points
gives the interpolation function
v(ξsi ) =2
N
N∑k=0
N∑j=0
1
ckcjv(ξj) cos
(k(i + 1
2)π
N
)cos
(kjπ
N
), (58)
Eqs. 55 and 58 can be written in matrix form and are implemented via matrix
multiplication, as was done previously with the Chebyshev derivative operator.
Code Verification
The code was benchmarked against 2D results by setting kz = 0 and dropping the
stress diffusion terms in the constitutive equation. Linearizing around the steady
state solution and introducing the normal mode form given in Eq. 49 gives the

82
following reduced system of equations for 2D disturbances
−ikxp + ikxτxx + τ ′yx + S(−k2xu+ u′′
)= 0 (59a)
−p′ + ikxτyx + τ ′yy + S(−k2xv + v′′
)= 0 (59b)
Qτxx − 2ikx(τxx + 1)u− 2τyxu′ − (iσ − ikxu)n− 2τyx = 0 (59c)
Qτyx − ikx(τxx + 1)v − u′ − n− τyy = 0 (59d)
Qτyy − 2ikxτyxv − 2v′ − (iσ − ikxu)n = 0 (59e)
−n′′ + (−iσ + ikxu + k2x)n+[−k2xτxx + 2ikxτ
′yx + τ ′′yy
]= 0 (59f )
ikxu + v′ = 0 (59g)
where Q = 1− iσ+ ikxu and u = We(y+ us). The constitutive equations, Eqs. 59c -
59e can be solved for the stress components in terms of velocities and n. After elimi-
nating pressure from the momentum equations, Eqs. 59a and 59b, these expressions
for the stresses can be put into the momentum equation to give an equation relating
the velocities and concentration. After using the continuity equation to eliminate
u in favor of v, a general stability equation can be derived, which is
[Q2D2 − k2xQ2 − 2ikxQD − 2k2x] [D
2 + 2ikxτyxD − k2x(τxx + 1)] v+
SQ3(D2 − k2x)2v − ikx [Q2D2 − 2ikxD + k2xQ
2] n = 0.(60)
This equation contains three pieces: 1) the first operator is the polymer (UCM)
term, 2) the second term is the solvent term, and 3) the last term is a concentration
term due to the coupling between stress and concentration. It is not clear from
this equation where the continuous spectra should be found, as the concentration
dependence of the velocities is unknown. So, Eq. 59f , is simplified by substituting

83
for the stresses to give
[1− i
(σ − kxu
Q
)]n′′ +
[i(σ − kxu)− k2x
[1− i
(σ − kxu
Q
)]]n = 0 (61)
This equation is decoupled from the stability equation, due to cancelation of the
stress terms. One set of continuous eigenvalues will be where this equation is sin-
gular, i.e.,
σ = kx(y + us)−i
2(62)
Since n can be determined from Eq. 61, the stability equation is just the Oldroyd-
B stability equation with forcing. Therefore, we also expect strips of continuous
spectra where the Oldroyd-B stability problem is singular [43, 103], specifically
σ =
kx(y + us)− i
kx(y + us)−i(S+1)
S
. (63)
All three strips of continuous spectra are stable. Theoretically, we could also de-
termine some of the discrete eigenvalues by solving Eq. 61 and applying no-flux
boundary conditions. However, there is no fortuitous cancelation after substituting
for the stresses in the boundary condition and consequently, the no-flux bound-
ary condition contains velocities which must be determined by solving the stability
equation. It would appear then that all of the discrete eigenvalues are affected by the
coupling between velocity and concentration and obtaining analytical expressions
for any of them would be difficult. Nevertheless, the locations of the continuous
spectra are useful checks on the code.
Fig. 30 shows the eigenvalue spectrum for 2D disturbances with the stress diffu-
sion terms dropped. Three strips of continuous spectrum exist and their locations

84
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0−3.0
−2.5
−2.0
−1.5
−1.0
−0.5
0.0
0.5
0.0 4.0 8.0 12.0 16.0 20.0 24.0 28.0 32.0Re(σ)
−320.0
−260.0
−200.0
−140.0
−80.0
−20.0
40.0
Im(σ
)
G−L modeSlip mode
Concentration modeSlip mode
Inset
Figure 30: Eigenvalue spectrum for 2D disturbances with the stress diffusion termdropped. The parameters are kx = 0.3467, We = 11.9, b = 0.1442, S = 0.01, N = 96.The eigenvalues which determine the stability are designated by circles and are onthe left side of the spectrum. The “tail” of eigenvalues extending to the right arenearly continuous modes which are not resolved.
are in excellent agreement with the above predictions. There are 4 discrete modes
near the strip of continuous spectra due to the concentration equation: two slip
modes; a mode corresponding to the classical Gorodtsov-Leonov eigenvalue; and a
concentration mode. Note that the continuous strip due to the concentration equa-
tion is less stable than its UCM counterpart, and is therefore expected to interfere
more strongly with the calculation of the discrete modes leading to instability.
The SID technique is very effective at resolving the discrete and continuous
modes, as shown in Fig. 31, which compares the SID technique with the standard
collocation method on a bounded domain, with focus on the portion of the spectrum
near the ends of the UCM and concentration strips of continuous spectra. Only the
slip mode is observed for the standard technique with N = 192; the concentration
mode is absorbed into the continuous strip due to the concentration equation. N
must be increased to 280 before the second mode is resolved. The SID technique

85
2.0 4.0 6.0 8.0 10.0 12.0 14.0 16.0Re(σ)
−1.5
−1.0
−0.5
0.0
0.5
Im(σ
)
Slip mode
Concentration mode
Figure 31: Comparison of the standard and SID techniques. The figure does notshow the entire spectrum; instead, the focus is on the least stable portion. Theparameters are: We = 19.64, kx = 10, b = 0.02, Pe = 2000. 3 – Standard:N = 192, © – Standard: N = 280, 2 – SID: N = 192, � – SID: N = 96, � –DD: Nb = 75, Nc = 43. Note that Pe has no meaning for the SID simulations andsimply sets the location of the top plate for the remaining techniques. The stressdiffusion terms have dropped as described in the main text.
with N = 192 clearly resolves the mode and is superior to the standard scheme with
N = 280. In fact, the SID scheme with N = 96 is capable of resolving the mode
as well as the standard scheme with N = 280. This gives an enormous savings in
computer time and storage.
Also shown are the results for a domain decomposition (DD) technique. The
key to improving the resolution of the spectrum near the endpoints is improving
the underlying spatial discretization of the governing equations near the bound-
aries. To do this without increasing the overall number of collocation points, the
domain is broken up into three subdomains, one near each boundary and one in the
center of the channel in which the number of collocation points can be varied in-
dependently. The boundary domains are much smaller than the central domain, in
fact, the boundary domain size scales as 1/kx, since this is the size of the boundary

86
layer that the perturbations are confined to. Matching conditions are applied at the
intersection of each domain. Souvaliotis and Beris [90] reported only needing C0
continuity (piecewise continuity) between domains for their flow calculations, but
here C1 continuity (continuous first derivatives) for each variable had to be imposed
to get meaningful spectra. Fig. 31 also shows the spectrum for domain decompo-
sition for boundary domains with Nb = 75 for the number of collocation points,
and a central domain with Nc = 43 for the number of collocation points, giving a
total number of 193 collocation points (which is the same as a single domain with
N = 192). The resolution of the concentration mode is about the same as for the
single domain problem with N = 280, so this technique is an improvement in that it
does save time and storage over the standard scheme, but not nearly as much as the
SID technique. Note that the domain decomposition technique could be combined
with the SID technique, but the improvement is expected to be slight at best, as
essentially all of the collocation points in the SID technique are already resolving
the boundary layer.
5.2.2 Stability Results
Fig. 32 shows a portion of a typical eigenvalue spectrum obtained using the SID
technique. The “tail” of eigenvalues extending to the right is composed of the
nearly continuous modes mentioned above. These modes are not mesh-resolved at
N = 96, and in fact, part of the tail has Re(σ) > 0, spuriously indicating instability.
The modes on the left designated with circles are the modes which determine the
stability and are resolved for this number of collocation points.
The coupling of slip to concentration and stress leads to novel hydrodynamic

87
0.0 100.0 200.0 300.0 400.0 500.0Re(σ)
−20.0
−15.0
−10.0
−5.0
0.0
5.0
10.0
15.0
Im(σ
)
Figure 32: A typical eigenvalue obtained using the SID technique. The parametersare We = 10, kx = 1, b = 1, S = 0.01, and N = 96.
instabilities in plane Couette flow. Note that if Dtr is set to zero in the dimensional
equations, the model reduces to the Oldroyd-B model, and plane Couette flow with
either the no-slip [27] or Navier slip [66, 13, 14] boundary condition is stable for
all Weissenberg numbers. Also, if concentration variations are permitted but slip
is not, by setting b = 0, the flow is again stable. Fig. 33 shows neutral curves with
slip, plotted as Wec vs. kx for two dimensional disturbances, kz = 0, with b fixed.
At low values of kx, power law behavior is observed. For b(= b∗/√Dtrλ) = 1, the
critical wavenumber is kx ≈ 0.8, so that the length scales for slip and the instability
are the same. Careful examination reveals that at low wavenumbers (those most
easily observed by microscopy), the critical We first decreases and then increases
with increasing b – the increasing section of the curve is in agreement with the
observations of Mhetar and Archer [56] that treating the surface to increase slip
delayed the onset of fluctuations. Note that there is a transition from one mode
of instability to another, leading to multiple minima in the neutral curve, as most
clearly seen in the curve for b = 2. For larger values of b, the neutral curves

88
10−1
100
101
kx
1
10
100
We c
b = 1b = 2b = 4b = 8b = 10
Unstable
Stable
Figure 33: Neutral curves for kz = 0 and S = 10−2 for various values of b. Thesecurves were computed using the SID technique with N = 96.
nearly lie on top of one another, due to localization of the waves with respect to
the slip length. Typical three dimensional neutral curves are shown in Fig. 34 for
both unstable modes, where clearly the most dangerous modes are two dimensional.
Only two dimensional results are considered further.
Fig. 35 shows a density plot of the unstable eigenvector for the concentration.
The concentration perturbation is oriented in the same direction as enhanced fluc-
tuations within the HF mechanism described by Ji and Helfand [41]. In agreement
with the observations of Mhetar and Archer [56], perturbations are localized near
the surfaces and are observed at large We. As a result, one would expect scatter-
ing to be more pronounced in the boundary regions as opposed to the bulk. One
concern is that for Rouse chains the characteristic length√Dtrλ is proportional to
the end-to-end distance of the chain, i.e., this is a molecular length scale. Note
that the validity of the model becomes suspect for fluctuation sizes on the order
of molecular lengths because it does not capture dynamics on these length scales.
However, as the characteristic length is experimentally much larger than molecular

89
0.00 0.10 0.20 0.30 0.40 0.50kz
8.0
9.0
10.0
11.0
We c
b = 2 (Mode 1)b = 6 (Mode 2)
Unstable
Stable
Figure 34: Neutral curves for three dimensional disturbances at the given values ofkx and b. These curves were computed using the SID technique with N = 96, S =10−2.
length scales, the model is valid until kx � 1.
5.3 Brownian Fluctuations
The stability results are suggestive, but do not address the dynamics of random,
thermal fluctuations on the system. Typical theoretical calculations involve deter-
mining the linear response of the system to random forcing throughout the domain,
then computing the concentration correlation function. Instead of introducing fluc-
tuations in multiple directions, the normal mode form of the linearized variables is
used. This is equivalent to Fourier transforming the governing equations in the x-
and z-directions. The correlation function is then determined for a given wavenum-
ber in each direction. In addition, we only consider random concentration fluctua-
tions and do not force the other variables. This assumption is not unprecedented,
as Helfand and Fredrickson [36] only considered velocity and concentration fluctua-
tions and neglected variations in stress, while Ji and Helfand [41] demonstrated that

90
0 Π�kx 2Π�kx 3Π�kx 4Π�kxx
0
1
2
3
4
5
y
Figure 35: Unstable eigenfunction for the concentration. The parameters are kx =0.4, b = 10, We = 10, S = 0.01, N = 96.
velocity is a fast variable as well. The linearized concentration equation becomes
∂n
∂t+ v · ∇n = ∇2n−∇∇ : τ +∇ ·w(x, t) (64)
where w a the random component of the polymer mass flux satisfying [24]
〈w(x, t)w(x′, t′)〉 = 2n∗0(Dtrλ)32δ δ(x− x′)δ(t− t′) (65)
〈w(x, t)〉 = 0. (66)
In order to satisfy conservation of mass, n · w = 0 on the boundaries, where n
is the outward unit normal, and the forcing was weighted appropriately so that
the magnitude was uniform throughout the domain. Time integration is performed
using an implicit Euler scheme
(CS + ∆tLS
)an+1 = CSan + ∆t∇ ·wn(x, t). (67)
with arbitrary initial condition. Here, n(y, 0) = cos(6y), τ (y, 0) = 0. Comparison of
the time integration results without noise with the SID stability results confirmed
convergence as ∆t → 0. For accurate results, the time step had to be small;
∆t = 0.001 for all of the simulations below.

91
Generally, time integration on a bounded domain provided the best results.
The SID technique is very good at approximating the eigenvalues near the surfaces,
however, the price paid is very poor resolution of the continuous modes further away
from the surface. These modes can be spuriously unstable, making time integration
impossible. To use the bounded domain, the location of the top plate must be
specified, and is chosen to satisfy the SID constraint that the wavenumber be much
larger than the reciprocal of the gap width, in dimensionless terms, kx �√We/Pe.
The primary quantity of interest is the spatial correlation function, defined in
general for a given x-wavenumber kx as:
〈g(x; kx)g(x′; kx)〉 = 2Re〈g(y; kx)g
∗(y′; kx)〉 cos(kx(x− x′))−
2 Im〈g(y; kx)g∗(y′; kx)〉 sin(kx(x− x′)). (68)
To confirm that the noise is being generated correctly, we first compute the spatial
correlation for the forcing by setting g(x; kx) = ∇·w(x; kx) = f(x; kx). Figs. 36(a)
and 36(b) show the real and imaginary parts of the correlation, respectively, and
demonstrate clearly that the noise is real and correlated in y as ∇2δ(y − y′), as
anticipated. The jaggedness evident in Fig. 36(a) is a plotting artifact due to the
fact that the noise is evaluated at discrete points in y.
The scattering is determined by the concentration spatial correlation function,
g(x; kx) = n(x; kx). Fig. 37 shows the concentration correlation function at equilib-
rium. Fluctuations are very strongly correlated near the surface and the magnitude
drops off to a value O(1) in the bulk. The imaginary part of the correlation is
zero, so that fluctuations decay without a directional bias, as is intuitively expected
when there is no shear. The length scale given by the width of the correlation is

92
025
5075
0
25
5075
10005�10�19
�5�10�19
2550
75y
y’Im<
f(y;
k x)
f*(y
’;k x
)>
025
5075
0
25
50
75100
00.02.04
2550
75y
y’
Re<
f(y;
k x)
f*(y
’;k x
)>
(a) (b)
Figure 36: The noise correlation function. (a) real part, (b) imaginary part. Thenoise is δ correlated in y and the imaginary part of the correlation is zero, confirmingthat the noise is being generated correctly.
01
23
45 0
1
23
45
02�105�105
12
34y
y’Re<
n(y;
k x)
n(y’
;kx)
>
Figure 37: Correlation function at equilibrium.
O(√Dtrλ). Figure 38 shows a series of correlation functions for increasing Weis-
senberg number. The real part of the correlation remains essentially unchanged, but
the imaginary part is nonzero, indicating that the fluctuations are enhanced in a
particular direction. The direction of enhancement can be determined by rewriting
the correlation function as a single sinusoid
〈n(x; kx)n(x′; kx)〉 =√
Re〈n(y; kx)n∗(y′; kx)〉2 + Im〈n(y; kx)n∗(y′; kx)〉2 ×
sin [(x− x′)− φ] , (69)

93
where φ is the phase angle, defined as
φ = tan−1 (−Im〈n(y; kx)n∗(y′; kx)〉/Re〈n(y; kx)n
∗(y′; kx)〉) , (70)
and computing the phase angles from the correlation functions. In all cases shown
in Fig. 38, the real part of the correlation is positive, so it suffices to consider
only the imaginary part to get the general idea. Consider Fig.38(f), which is the
imaginary part of the concentration correlation for We = 5, and the boundary point
y′ = 0. For points y in the interior, y > y and Im〈n(y; kx)n∗(y′; kx)〉 is negative.
This gives a positive phase shift, φ > 0. Therefore, the angle of positive correlation
is positive. The wavevector of the enhanced fluctuation is normal to the correlation
angle and points into the fourth quadrant. This is indeed the structure observed
if the concentration profile is plotted, as shown in Fig. 39(c). In general, if the
correlation is negative for y′ > y, then the orientation is in the fourth quadrant
and if the correlation is positive, then the orientation is in the first quadrant. For
We = 0.1, the orientation is in the first quadrant, except for perhaps a very small
region near the surface and that for We = 1 the orientation changes away from
the surface, from the first to the fourth quadrant. This interpretation is borne
out looking at the concentration profiles in Fig. 39. Evidently, the wavevector of
the enhanced fluctuation rotates as the shear rate increases. This rotation of the
wavevector has been predicted previously for the bulk by Ji and Helfand [41] and
Milner [60] and observed experimentally by Wu et al. [105], also for the bulk. The
results presented here suggest that fluctuations near the surface are enhanced by
mechanisms analogous to those in the bulk, but with larger magnitudes because
of the vicinity to the no-flux boundary. Results for the no-slip case are virtually
identical – the response of the flow to Brownian noise is quite insensitive to the

94
presence of slip. In other words, the modes excited by the Brownian noise are
those that are common to both the slip and no-slip cases, and in fact, most of the
spectrum is changed only trivially by slip, as shown in Fig. 40. Therefore, even in
the absence of flow instability, (i.e. when We � O(1) and/or slip is absent), the
near surface regions may make a nontrivial contribution to the scattering signal,
particularly its anisotropy under flow.
5.4 Summary
Recent experimental evidence suggests that slip at the polymer/solid interface may
play a role in the formation and development of enhanced concentration fluctuations
in semidilute polymer solutions. In particular, the initiation of enhanced concen-
tration fluctuations was directly observed to happen at the interface and modifying
the surface to increase slip delayed the onset of enhancement to much higher shear
rates. Previous theoretical treatments have focused on the behavior in the x-y plane
and have successfully explained most of the behavior observed. Slip leads to a new
class of viscoelastic flow instabilities which result from the interaction of slip with
stress and concentration. The critical wavenumber agrees with those observed in
experiments so that the relevant length scale for the instability is√Dtrλ. The crit-
ical We is O(10) for b ∼ O(1), which is within the correct order of magnitude. Time
integration of the governing equations with random concentration fluctuations dis-
tributed throughout the domain shows that Brownian fluctuations are selectively
and dramatically enhanced near the surface, with a boundary layer size consistent
with experiment. The local wavevector for the enhanced fluctuation rotates as the

95
shear rate increases, as predicted and observed for the bulk. Overall, these results
are consistent with experimental observations and underscore two points regarding
the flow behavior of polymeric liquids: (1) the distinctness and importance of the
dynamics of flowing polymers near boundaries, even at the continuum level, and
(2) the importance of couplings between various phenomena for the dynamics and
stability of these flows.

96
01
23
45 0
1
2
34
5
�5000
50000
12
34y
y’Im<
n(y;
k x)
n*(y
’;k x
)>
01
23
45 0
1
2
34
5�105
2�105
0
12
34y
y’Re<
n(y;
k x)
n*(y
’;k x
)>
01
23
45 0
1
2
34
501000
�1000
12
34y
y’Im<
n(y;
k x)
n*(y
’;k x
)>
01
23
45 0
1
2
34
5
02�105�105
12
34y
y’Re<
n(y;
k x)
n*(y
’;k x
)>
01
23
45 0
1
2
34
5
�200
200
0
12
34y
y’Im<
n(y;
k x)
n*(y
’;k x
)>
01
23
45 0
1
2
34
5�105
2�105
0
12
34y
y’Re<
n(y;
k x)
n*(y
’;k x
)>
(a)
(b)
(c)
(d)
(e)
(f)
Figure 38: Series of concentration correlation functions for increasing We. Pictures(a) and (d) are for We = 0.1, (b) and (e) are for We = 1, and (c) and (f) arefor We = 5. As the Weissenberg number increases, the wavevector of the enhancedfluctuation rotates from the first quadrant to the fourth. The remaining parametersare kx = 1, S = 0.01, N = 192.

97
0 Π�kx 2Π�kx 3Π�kx 4Π�kx
y
x
0 Π�kx 2Π�kx 3Π�kx 4Π�kx
0
1
2
3
4
5
(a)
(b)
(c)
0 Π�k 2Π�k 3Π�k 4Π�kx
y
Figure 39: Series of snapshots of typical concentration profiles as We is increased:(a) - We = 0.1; (b) - We = 1; and (c) - We = 5. Note change in orientation, fromthe first quadrant to the fourth, as We is increased.

98
0.0 25.0 50.0 75.0 100.0Re(σ) − b
−2.0
−1.5
−1.0
−0.5
0.0
0.5
Im(σ
)
Figure 40: Eigenvalue spectra for the slip and no-slip cases in the bounded flowdomain. This figure only shows the least stable portions of the spectra. 3 - b = 1,© - b = 0. The remaining parameters are We = 10, kx = 1, S = 0.01, N = 128.

99
Chapter 6
Concluding Remarks
The results in Chs. 3 and 5 highlight the importance of polymer – surface inter-
actions, wall slip in particular, on the macroscopic flow behavior of polymer melts
and solutions. It has been demonstrated that well-posed slip models can lead to
instabilities in polymer melt flows. In particular, inclusion of chain orientation and
stretching at the surface in slip models is crucial for predicting instabilities con-
sistent with experimental observations. Slip couples to stress and concentration in
polymer solutions as well, leading to hydrodynamic instability in these systems,
although this is not the only effect of surfaces on solutions. Indeed, random fluc-
tuations are selectively and dramatically enhanced near the surfaces, even in the
absence of slip and even at equilibrium. This type of surface effect may be important
in other systems driven by random fluctuations, particularly phase separating poly-
mer solutions and blends, where the surface may affect the onset of phase separation
as well as the morphology.
To conclude, a recent experimental result for sharkskin is highly suggestive of

100
possible future directions for this work and highlights some of the synergies be-
tween flows of melts and entangled solutions. Barone and Wang [7] studied ex-
trusion of polybutadiene through a transparent quartz slit die. They chemically
treated the downstream half of the die, by coating it with a polysiloxane. This
enhanced wall slip and created an internal boundary singularity. Instability was
observed using birefringence in the vicinity of the singularity which decayed down-
stream. The period of oscillation was similar to the period of oscillation at the
die exit for an uncoated die in which the extrudate exhibited sharkskin. Wang and
Plucktaveesak [101] observed a similar effect due to an internal boundary singularity
during HDPE extrusion. Mhetar and Archer [56] used quartz plates for their plane
Couette cell and a similar siloxane treatment was effective in promoting slip for
polystyrene solutions. The velocity profile measurement technique of Mhetar and
Archer could be adapted to Barone and Wang’s system to reveal the slip behavior
near the internal singularity and/or Mhetar and Archer’s Couette cell could be used
to reproduce Barone and Wang’s experiment. From a theoretical point of view, these
bounded systems are the next step up in complexity from the viscometric analyses
reported here, and have the advantage of being much more amenable to analysis
than the full die exit problem, as there are no free surfaces and the attendant die
swell to consider. Even so, these geometries capture the critical issues of velocity
profile rearrangement downstream of the singularity and extensional velocity com-
ponents upstream. Understanding the role of boundary singularities and velocity
profile rearrangement will prove crucial to understanding sharkskin dynamics.

101
Nomenclature
The following table summarizes the notation used in this work. In general, starred
quantities have dimension and unstarred ones have been nondimensionalized. Cer-
tain variables, namely the ones typically used to nondimensionalize the others, are
always dimensional, even though they are not denoted with the asterisk. These are
noted in the description.
Variable Description Location(s)
b, b∗ Extrapolation length §3.2
B Linearization parameter §3.2
c, c∗ Eigenvalue describing the time dependence §3.2
δr Rubbery region thickness §2.1
Dtr Translational diffusivity §3.2, §5.1
ε, ε∗ Slip coefficient §2.3
f Fractional recovery §2.1
fn Random forcing §5.2
F Drag force §2.1
G Linearization parameter §3.2
Continued on next page

102
Continued from previous page
Variable Description Location
G∗ Shear modulus §3.2
γ Ratio of true and nominal Weissenberg
numbers
§3.2
γ∗n Nominal shear rate §3.2
γ∗t True shear rate §3.2
ηp Polymer viscosity (dimensional) §3.2
ηs Solvent viscosity (dimensional) §5.1
H Linearization parameter §3.2
k Fluctuation orientation vector §4
k Magnitude of k §4
kx Perturbation wavenumber in the flow di-
rection
§3.2, §5.2
kz Perturbation wavenumber in the neutral
direction
§5.2
l Gap width (dimensional) §3.2, §5.1
L Map parameter §5.2
λ Polymer relaxation time (dimensional) §3.2,§5.1
λs Relaxation time for slip (dimensional) §1.3.1
µ Phan Thien - Tanner model parameter §3.2
n Polymer concentration §5.1
n Outward unit normal §5.2
Continued on next page

103
Continued from previous page
Variable Description Location
N1 First normal stress difference §2.1
Q Dumbbell orientation vector §5.1
R Radius (dimensional) §2.1
R Linearization parameter §3.2
ρ Density (dimensional) §A.1
ρ Anisotropic drag slip model parameter §2.4
Re Reynolds number §1.3.1
s Equilibrium constant for the kinetic ex-
pression
§2.3
S Ratio of solvent viscosity to polymer vis-
cosity
§3.2
sR Recoverable shear §2.1
t, t∗ Time §1.3.1
T Temperature (dimensional) 2.4
τ , τ ∗ Polymer extra stress tensor §3.2, §5.1
τ Amplitude of the extra stress perturbation §3.2, §5.1
τ Extra stress perturbation §3.2, §5.1
u Velocity §3.2
u∗f Velocity of the free segments §2.3
us, u∗s Slip velocity §1.3.1
v Velocity §3.2
Continued on next page

104
Continued from previous page
Variable Description Location
V Characteristic velocity (dimensional) §2.1
Wa Work of adhesion §2.1
We Weissenberg number §4
Wen Nominal Weissenberg number §3.2
Wet True Weissenberg number §3.2
X Structural parameter/Bonding fraction §2.3
y Scaled y coordinate §3.3
ζ , ζ∗ Friction coefficient §2.1
ζ, ζ∗ Friction tensor §2.4

105
Appendix A
Basic Melt Equations
A.1 Nondimensionalization
The equations to be nondimensionalized are the equation of motion and the consti-
tutive equation. These equations are
ρDv∗
Dt∗= ∇∗ · τ ∗ −∇∗P ∗, (71)
(1 +µ
G∗tr τ ∗)τ ∗ + λτ∗(1) = ηp
(∇∗v∗ + (∇∗v∗)T
). (72)
The following relations are used to nondimensionalize the variables:
v =v∗
γ∗nl, (73)
t = γ∗nt∗, (74)
τ =τ ∗
G∗, (75)
p =P ∗
G∗, (76)
∇ = l∇∗. (77)

106
where γ∗nl is the characteristic velocity, γ∗n is the applied shear rate at the wall, G∗
is the shear modulus and l is the gap width. When these definitions are substituted
into Eqs. 71 and 72, the result is
Dv
Dt=
G∗
ργ∗ 2n l2(∇ · τ −∇P ) , (78)
τ (1) +G∗
ηpγ∗n(1 + µtr τ )τ = ∇v + (∇v)T (79)
Recall that G∗ = ηp/λ. With this definition, the constant on the left hand side of
the equation of motion can be written as:
G
ργ∗ 2n l2=
(ηp
ργ∗ 2n l
)(1
γ∗nλ
). (80)
Since Wen = γ∗nλ and Re = ργ∗nl∗
ηp, the equations can finally be written in dimension-
less form as:
ReWenDv
Dt= (∇ · τ −∇p) , (81)
τ (1) +1
Wen(1 + µ tr τ )τ = ∇v + (∇v)T (82)
(83)
The equation of continuity for an incompressible fluid is simply
∇ · v = 0 (84)
For all of the calculations in this thesis, Re = 0.
A.2 Derivation of the General Stability Equation

107
Equations 81, 82, and 84 can be written in component form for the two dimensional
problem with Re = 0 as:
∂τxx∂t
+ u∂τxx∂x
+ v∂τxx∂y− 2(τxx + 1)
∂u
∂x− 2τyx
∂u
∂y+
1
Wenτxx(1 + µτxx + µτyy) = 0, (85a)
∂τyx∂t
+ u∂τyx∂x
+ v∂τyx∂y− τyy
∂u
∂y−
∂u
∂y− (τxx + 1)
∂v
∂x+
1
Wenτyx(1 + µτxx + µτyy) = 0, (85b)
∂τyy∂t
+ u∂τyy∂x
+ v∂τyy∂y− 2τyy
∂v
∂y− 2τyx
∂v
∂x− 2
∂v
∂y+
1
Wenτyy(1 + µτxx + µτyy) = 0, (85c)
∂τxx
∂x+
∂τyx
∂y−
∂p
∂x= 0, (85d)
∂τyx∂x
+∂τyy∂y−
∂p
∂y= 0, (85e)
∂u
∂x+
∂v
∂y= 0, (85f )
The next step is to linearize this system of equations. This is accomplished by
assuming that each variable is equal to its steady state value plus some small per-
turbation, then retaining only the terms that are linear in the perturbations. Each
variable has the form a = a + δa where the bar denotes the steady state value, the
tilde indicates the perturbation, and δ is a small parameter used to keep track of the
linear terms. Collecting the O(1) terms yields the system to be solved for the steady
state solution. The O(δ) system is the linear system for the perturbations. Note
that the steady state values of the y-component of velocity and the second normal
stress are identically zero, and there are no gradients of the base state variables in

108
the x-direction. Finally, the linearized system of equations is
∂τxx∂t
+ u∂τxx∂x
+ vdτxxdy− 2(τxx + 1)
∂u
∂x− 2τyx
∂u
∂y− 2τyx
∂u
∂y+
1
Wen(1 + 2µτxx)τxx +
µ
Wenτxxτyy = 0, (86a)
∂τyx∂t
+ u∂τyx∂x
+ vdτxxdy− τyy
∂u
∂y−
∂u
∂y− (τxx + 1)
∂v
∂x+
µ
Wenτyxτxx +
1
Wen(1 + µτxx)τyx +
µ
Wenτyxτyy = 0, (86b)
∂τyy∂t
+ u∂τyy∂x− 2τyx
∂v
∂x− 2
∂v
∂y+
1
We(1 + µτxx)τyy = 0, (86c)
∂τxx∂x
+∂τyx∂y−
∂p
∂x= 0, (86d)
∂τyx∂x
+∂τyy∂y−
∂p
∂y= 0, (86e)
∂u
∂x+
∂v
∂y= 0, (86f )
The last step is to introduce a form for the perturbations. For a normal mode
analysis, it is a assumed that each variable can be written as a(y)eikx(x−ct) + c.c.,
where a(y) is the amplitude and is a function only of y, kx is the wavenumber, and
c is the eigenvalue for the time dependence of the disturbance. After substituting
the perturbations into Eqs. 86a - 86f , the system of equations to be solved for the

109
perturbations is
(−ikxc + ikxu +1
Wen+
2µ
Wenτxx)τxx − 2ikx(τxx + 1)u− 2τyxu
′ − 2u′τyx +
µ
Wenτxxτyy = 0,(87a)
(−ikxc + ikxu +1
Wen+
µ
Wenτxx)τyx − ikxv − u′ − u′τyy +
µ
Wen(τxx + τyy) = 0,(87b)
(−ikxc + ikxu +1
Wen+
µ
Wenτxx)τyy − 2ikxτyxv − 2v′ = 0,(87c)
ikxτxx + τ ′yx − ikxp = 0,(87d)
ikxτyx + τ ′yy − p′ = 0,(87e)
ikxu + v′ = 0,(87f )
The ′ denotes differentiation with respect to y.
The system of equations defined by Eqs. 87a through 87f can be reduced to
a single equation for the stream function. Since the stream function perturbation
is assumed to have the same form as the other perturbations, reducing to a single
equation for the stream function is equivalent to reducing to a single equation for
v. The first step in the reduction is to combine Equations 87d and 87e to eliminate
pressure and get a single equation relating just the stress components:
ikxτ′xx + k2xτyx + τ ′′yx − ikxτ
′yy = 0. (88)
The three constitutive relations can then be solved for the stresses and substituted
into Eq. 88. After noting that u = ikxv′ (from the equation of continuity) and

110
doing some substantial rearrangement, the general stability equation is
[(Q2D2 − k2xQ
2 + 2(u′)2 − 2Qu′D)(D2 + 2ikxτyxD − k2x − k2xτxx)+
k2xQu′′(τxx + 1) + ikx(ikxQτ ′xx + 2Qτ ′′yx − 4τyxu′′)(QD − u′)− 3Qu′′ +
4u′u′′D + ikxQ2τ ′′′yx − 2Qu′′′D − 2ikxQτyxu
′′′ + 3ikxQτ ′yx(QD2 − u′′)−
ikxτ′yx(k
2xQ2 + 4u′QD − 2(u′)2)
]v + µM(τ , µ)v = 0, (89)
where Q = −c+ u− ikxWen
, D is the ordinary derivative with respect to y, andM is
a complicated differential operator. For µ = 0, and plane Couette flow (i.e. the base
state gradients of stress with respect to y and second order and higher derivatives
of the base state velocity are zero), this reduces to
(Q2D2 − k2xQ2 + 2(u′)2 − 2Qu′D)(D2 + 2ikxτyxD − k2x − k2xτxx)v, (90)
which is identical to the general equation derived by Gorodtsov and Leonov [27].
A.3 PTT Matrix Eigenvalue Problem
The generalized eigenvalue problem that is obtained when the PTT constitutive
equation is used is

111
L=
0iα
d dy
d2
dy2+α2
−iα
d dy
−2W
e nτ yxd2
dy2−
2iαWe n
(1+τ x
x)d dy
1+iαWe n
d dyψ
+2µ
τ xx
−2W
e nd2
dy2ψ
µτ x
x
−α2We n
(1+τ x
x)−We n
d2
dy2
µτ yx
1+iαWe n
d dyψ
+µτ x
x−We n
d2
dy2ψ
+µτ yx
−2α2We nτ yx+
2iαWe n
d dy
00
1+iαWe n
d dyψ
+µτ x
x
(91)
C=
00
00
01
00
00
10
00
01
(9
2)

112
Appendix B
3D Stability Operators
The three dimensional operators for the polymer solution model are, with ∇2 =
d2
dx2+ d2
dy2+ d2
dz2and v · ∇ = u d
dx+ v d
dy+ w d
dz,
CS =
0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 1 0
0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0
0 0 0 0 0 0 1 0 0 1 0
0 0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 0 1 1 0
0 0 0 0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 0 0 0
(93)

113
LS=
SWe∇2
00
d dx
d dy
0SWe∇2
00
d dx
00
SWe∇2
00
−2We(1−ξ)[ (τxx+n)d dx
+τ yxd dy+τ zxd dz
]We(1−ξ)( dτxx
dy+dndy
)0
We(1−ξ)(v·∇)
−(1−ξ)(∇2−1)
−2We(1−ξ)dudy
−We(1−ξ)[ τ yxd dx+
(τyy+n)d dy+τ zyd dz
]−We(1−ξ)[ (τxx+n)d dx
+τ yxd dy+τ zxd dz−dτyx
dy
]0
0We(1−ξ)(v·∇)
−(1−ξ)(∇2−1)
−We(1−ξ)[ τ zxd dx
+τ zyd dy+(τzz+n)d dz
]We(1−ξ)dτzx
dy
−We(1−ξ)[ (τ xx+n)d dx
+τ yxd dy+τ zxd dz
]0
−We(1−ξ)dwdy
0−2We(1−ξ)[ τ yxd dx+
(τyy+n)d dy+τ zyd dz−1 2
dτyy
dy
]0
00
0−We(1−ξ)[ τ zxd dx+τ zyd dy
+(τzz+n)d dz−dτzy
dy
]−We(1−ξ)[ τ yxd dx
+τ yyd dy+(τzy+n)d dz
]0
0
0We(1−ξ)( dτzz
dy+dndy
)−2We(1−ξ)[ τ zxd dx
+τ zyd dy+(τzz+n)d dz
]0
0
0We(1−ξ)dndy
0(1−ξ)d2
dx2
2(1−ξ)d2
dxdy
d dx
d dy
d dz
00
···
d dz
00
00
−d dx
0d dy
d dz
00
−d dy
d dx
0d dy
d dz
0−d dz
00
00
We(1−ξ)(v·∇)
−(1−ξ)∇2
0
0−We(1−ξ)d dy
00
−We(1−ξ)dudy
0
We(1−ξ)(v·∇)
−(1−ξ)(∇2−1)
0−We(1−ξ)dudy
00
0
0We(1−ξ)(v·∇)
−(1−ξ)(∇2+1)
00
We(1−ξ)(v·∇)
−(1−ξ)(∇2−1)
0
0−We(1−ξ)dwdy
We(1−ξ)(v·∇)−dvdy
−(1−ξ)(∇2−1)
0−We(1−ξ)dwdy
0
00
−2We(1−ξ)dwdy
We(1−ξ)(v·∇)
−(1−ξ)(∇2−1)
We(1−ξ)(v·∇)
−(1−ξ)∇2
0
2(1−ξ)d2
dxdz
(1−ξ)d2
dy2
2(1−ξ)d2
dzdy
(1−ξ)d2
dz2
We(1−ξ)(v·∇)
−(1−ξ)∇2
0
00
00
00
(94)

114
Bibliography
[1] D. Acierno, F. P. L. Mantia, G. Marrucci, and G. Titomanlio, “A non-linear
viscoelastic model with structure dependent relaxation times I: Basic formu-
lation,” J. Non-Newtonian Fluid Mech., 1:125–146 (1976).
[2] J.-F. Agassant, P. Avenas, J.-P. Sergent, and P. J. Carreau, Polymer Process-
ing, Principles and Modeling, Hanser, 1991.
[3] A. Ajdari, F. Brochard-Wyart, P.-G. de Gennes, L. Leibler, J.-L. Viovy, and
M. Rubinstein, “Slippage of an entangled polymer melt on a grafted surface,”
Physica A, 204:17–39 (1994).
[4] A. Ajji, H. P. Schreiber, and D. Duchesne, “Flow defects in linear low den-
sity polyethylene processing: Instrumental detection and molecular weight
dependence,” Polymer Engineering and Science, 33(23):1524–1531 (1993).
[5] L. A. Archer, R. G. Larson, and Y. L. Chen, “Direct measurements of slip in
sheared polymer solutions,” J. Fluid Mech., 301:133–151 (1995).
[6] B. T. Atwood and W. R. Schowalter, “Measurements of slip at the wall during
flow of high density polyethylene through a rectangular conduit,” Rheol. Acta,
28:134–146 (1989).
[7] J. Barone and S.-Q. Wang, “Flow birefringence study of sharkskin and stress
relaxation in polybutadiene melts,” Rheol. Acta, 38(5):404–414 (1999).

115
[8] J. R. Barone, N. Plucktaveesak, and S. Q. Wang, “Interfacial molecular in-
stability mechanism for sharkskin phenomenon in capillary extrusion of linear
polyethylenes,” J. Rheol., 42(2):813–832 (1998).
[9] A. N. Beris and V. G. Mavrantzas, “On the compatability between various
macroscopic formalisms for the concentration and the flow of dilute polymer
solutions,” J. Rheol., 38(5):1235–1250 (1994).
[10] R. B. Bird, C. F. Curtiss, R. C. Armstrong, and O. Hassager, Dynamics of
Polymeric Liquids, volume 2, Wiley - Interscience, New York, 1987.
[11] I. A. Bitsanis and G. ten Brinke, “A lattice Monte Carlo study of long chain
conformations at solid-polymer melt interfaces,” J. Chem. Phys., 99(4):3100–
3111 (1993).
[12] W. B. Black. “A kinetic slip model for the prediction of polymer melt flow
instabilities,” . Master’s thesis, University of Wisconsin-Madison, 1997.
[13] W. B. Black and M. D. Graham, “Wall-slip and polymer-melt flow instability,”
Phys. Rev. Lett., 77(5):956–959 (1996).
[14] W. B. Black and M. D. Graham, “Effect of wall slip on the stability of vis-
coelastic plane shear flow,” Phys. Fluids, 11(7):1749–1756 (1999).
[15] J. P. Boyd, “Orthogonal rational functions on a semi-infinite interval,” J.
Comp. Phys., 70:63–88 (1987).
[16] F. Brochard and P. G. de Gennes, “Shear-dependent slippage at a poly-
mer/solid interface,” Langmuir, 8:3033–3037 (1992).
[17] C. Canuto, M. Y. Hussaini, A. Quarteroni, and T. A. Zang, Spectral Methods
in Fluid Dynamics, Springer-Verlag, Berlin, 1988.

116
[18] C. F. Curtiss and R. B. Bird, “Diffusion-stress relations in polymer mixtures,”
J. Chem. Phys., 111(22):10362 – 10370 (1999).
[19] J. Dealy and K. Wissbrun, Melt Rheology and its Role in Plastics Processing:
Theory and Applications, Van Nostrand Reinhold, New York, 1990.
[20] W. R. Dean and P. E. Montagnon, “On the steady motion of viscous liquid
in a corner,” Proc. Cambridge. Philos. Soc., 45:389 (1949).
[21] P. G. Drazin and W. H. Reid, Hydrodynamic Stability, Cambridge University
Press, 1981.
[22] P. A. Drda and S.-Q. Wang, “Stick-slip transition at polymer melt/solid in-
terfaces,” Phys. Rev. Let., 75(14):2698–2701 (1995).
[23] B. S. Garbow, “The QZ algorithm to solve the generalized eigenvalue prob-
lem for complex matrices,” ACM Transactions on Mathematical Software,
4(4):404–410 (1978).
[24] C. W. Gardiner, Handbook of Stochastic Methods, Springer-Verlag, Berlin,
1985.
[25] G. C. Georgiou, “On the stability of the shear flow of a viscoelastic fluid with
slip along the fixed wall,” Rheol. Acta, 35:39–47 (1996).
[26] V. G. Ghanta, B. J. Riise, and M. M. Denn, “Disappearance of extrusion
instabilities in brass capillary dies,” J. Rheol., 43(2):435–442 (1999).
[27] V. A. Gorodtsov and A. I. Leonov, “On a linear stability of a plane paral-
lel Couette flow of viscoelastic fluid,” J. Appl. Math. Mech., 31(2):310–319
(1967).

117
[28] M. D. Graham, “Effect of axial flow on viscoelastic Taylor-Couette instabil-
ity,” J. Fluid Mech., 360:341–374 (1998).
[29] M. D. Graham, “The sharkskin instability of polymer melt flows,” Chaos,
9(1):154–163 (1999).
[30] P. J. Halley and M. E. Mackay, “The effect of metals on the processing of
LLDPE through a slit die,” J. Rheol., 38(1):41–51 (1994).
[31] T. Hashimoto and K. Fujioka, “Shear enhanced concentration fluctuations in
polymer solutions as observed by flow light scattering,” J. Phys. Soc. Jpn.,
60(2):356–359 (1991).
[32] T. Hashimoto and T. Kume, ““Butterfly” light scattering patterns in shear-
enhanced concentration fluctuations in polymer solutions and anomaly at high
shear rates,” J. Phys. Soc. Jpn., 61(6):1839–1843 (1992).
[33] S. G. Hatzikiriakos and J. M. Dealy, “Wall slip of molten high density
polyethylene. I. Sliding plate rheometer studies,” J. Rheol., 35(4):497–523
(1991).
[34] S. G. Hatzikiriakos and J. M. Dealy, “Wall slip of molten high density
polyethylene. II. Capillary rheometer studies,” J. Rheol., 36(4):703–741
(1992).
[35] S. G. Hatzikiriakos and N. Kalogerakis, “A dynamic slip velocity model for
molten polymers based on a network kinetic theory,” Rheol. Acta, 33:38–47
(1994).
[36] E. Helfand and G. H. Fredrickson, “Large fluctuations in polymer solutions
under shear,” Phys. Rev. Lett., 62(21):2468–2471 (1989).

118
[37] D. A. Hill, “Wall slip in polymer melts: A pseudo-chemical model,” J. Rheol.,
42(3):581–601 (1998).
[38] D. A. Hill, T. Hasegawa, and M. M. Denn, “On the apparent relation between
adhesive failure and melt fracture,” J. Rheol., 34(6):891–918 (1990).
[39] E. J. Hinch, “The flow of an Oldroyd fluid around a sharp corner,” J. Non-
Newtonian Fluid Mech., 50:161–171 (1993).
[40] T. C. Ho and M. M. Denn, “Stability of plane Poiseuille flow of a highly elastic
liquid,” J. Non-Newtonian Fluid Mech., 3:179–195 (1978).
[41] H. Ji and E. Helfand, “Concentration fluctuations in sheared polymer solu-
tions,” Macromolecules, 28(11):3869–3880 (1995).
[42] D. S. Kalika and M. M. Denn, “Wall slip and extrudate distortion in linear
low-density polyethylene,” J. Rheol., 31(8):815–834 (1987).
[43] R. A. Keiller, “Numerical instability of time dependent flows,” J. Non-
Newtonian Fluid Mech., 43:229–246 (1992).
[44] N. E. Kissi and J. M. Piau, “The different capillary flow regimes of entangled
polydimethylsiloxane polymers: Macroscopic slip at the wall, hysteresis, and
cork flow,” J. Non-Newtonian Fluid Mech., 37:55–94 (1990).
[45] N. E. Kissi, J.-M. Piau, and F. Toussaint, “Sharkskin and cracking of polymer
melt extrudates,” J. Non-Newtonian Fluid Mech., 68(2-3):271–290 (1997).
[46] T. Kume, T. Hashimoto, T. Takahashi, and G. G. Fuller, “Rheo-optical stud-
ies of shear induced structures in semi-dilute polystyrene solutions,” Macro-
molecules, 30(23):7232–7236 (1997).

119
[47] S. J. Kurtz, “Die geometry solutions to sharkskin melt fracture,” In Advances
in Rheology, Proceedings of the IX International Congress on Rheology, vol-
ume 3, pages 399–407, 1984.
[48] S. J. Kurtz, “The dynamics of sharkskin melt fracture in LLDPE,” In Pro-
ceedings of the 7th PPS Meeting, pages 54–55, 1991.
[49] S. J. Kurtz, “The dynamics of sharkskin melt fracture: Effect of the die geome-
try,” In Theoretical and Applied Rheology, Proceedings of the XI International
Congress on Rheology, pages 377–379, 1992.
[50] K.-C. Lee and B. A. Finlayson, “Stability of plane Poiseuille and Couette flow
of a Maxwell fluid,” J. Non-Newtonian Fluid Mech., 21:65–78 (1986).
[51] F. J. Lim and W. R. Schowalter, “Pseudo-spectral analysis of the stability
of pressure driven flow of a Giesekus fluid between parallel planes,” J. Non-
Newtonian Fluid Mech., 26:135–142 (1987).
[52] F. J. Lim and W. R. Schowalter, “Wall slip of narrow molecular weight dis-
tribution polybutadienes,” J. Rheol., 33(8):1359–1382 (1989).
[53] M. E. Mackay and D. J. Henson, “The effect of molecular mass and tem-
perature on the slip of polystyrene melts at low stress levels,” J. Rheol.,
42(6):1505–1517 (1998).
[54] V. G. Mavrantzas and A. N. Beris, “Modeling of the rheology and flow-induced
concentration changes in polymer solutions,” Phys. Rev. Lett., 69(2):273–276
(1992).
[55] V. Mhetar and L. A. Archer, “Molecular origin of polymer melt flow instabil-
ities,” In Conference Proceedings/ANTEC, pages 1876–1880, 1997.

120
[56] V. Mhetar and L. A. Archer, “Slip in entangled polymer solutions,” Macro-
molecules, 31(19):6639–6649 (1998).
[57] V. R. Mhetar and L. A. Archer, “Secondary flow of entangled polymer fluids
in plane Couette shear,” J. Rheol., 40(4):549–571 (1996).
[58] K. B. Migler, H. Hervet, and L. Leger, “Slip transition of a polymer melt
under shear stress,” Phys. Rev. Let., 70(3):287–290 (1993).
[59] S. T. Milner, “Hydrodynamics of semidilute polymer solutions,” Phys. Rev.
Lett., 66(11):1477–1480 (1991).
[60] S. T. Milner, “Dynamical theory of concentration fluctuations in polymer
solutions under shear,” Phys. Rev. E, 48(5):3674–3691 (1993).
[61] H. K. Moffatt, “Viscous and resistive eddies near a sharp corner,” J. Fluid
Mech., 18:1–18 (1964).
[62] M. Mooney, “Explicit formulas for slip and fluidity,” J. Rheol., 2:210 (1931).
[63] E. Moses, T. Kume, and T. Hashimoto, “Shear microscopy of the “butterfly
pattern” in polymer mixtures,” Phys. Rev. Lett., 72(13):2037–2040 (1994).
[64] R. H. Moynihan, D. G. Baird, and R. Ramanathan, “Additional observations
on the surface melt fracture behavior of linear low density polyethylene,” J.
Non-Newtonian Fluid Mech., 36:255–263 (1990).
[65] C. Pan and I. Bitsanis, “Structure, conformation, and dynamics of polymer
chains at solid-melt interfaces,” Makromol. Chem.,Macromol. Symp., 65:211–
222 (1993).
[66] J. R. A. Pearson and C. J. S. Petrie, “On the melt flow instability of extruded
polymers,” In R. E. Wetton and R. W. Whorlow, editors, Polymer Systems:

121
Deformation and Flow, Proceedings of the 1966 Annual Conference of the
British Society of Rheology, pages 163–187, London, 1968. Macmillan.
[67] T. J. Person and M. M. Denn, “The effect of die materials and pressure-
dependent slip on the extrusion of linear low-density polyethylenes,” J. Rheol.,
41(2):249–265 (1997).
[68] N. Phan-Thien, “A nonlinear network viscoelastic model,” J. Rheol.,
22(3):259–283 (1978).
[69] N. Phan-Thien and R. I. Tanner, “A new constitutive equation derived from
network theory,” J. Non-Newtonian Fluid Mech., 2:353–365 (1977).
[70] J. M. Piau and N. E. Kissi, “Measurement and modelling of friction in polymer
melts during macroscopic slip at the wall,” J. Non-Newtonian Fluid Mech.,
54:121–142 (1994).
[71] J.-M. Piau, N. E. Kissi, F. Toussaint, and A. Mezghani, “Distortions of poly-
mer extrudates and their elimination using slippery surfaces,” Rheol. Acta.,
34:40–57 (1995).
[72] J.-M. Piau, N. E. Kissi, and B. Tremblay, “Influence of upstream instabili-
ties and wall slip on melt fracture and sharkskin phenomena during silicones
extrusion through orifice dies,” J. Non-Newtonian Fluid Mech., 34:145–180
(1990).
[73] G. Pomar, S. J. Muller, and M. M. Denn, “Extrudate distortions in linear low-
density polyethylene solutions and melts,” J. Non-Newtonian Fluid Mech.,
54:143–151 (1994).
[74] K. Porteous and M. M. Denn, “Linear stability of plane Poiseuille flow of
viscoelastic liquids,” Trans. Soc. Rheol., 16(2):205–308 (1972).

122
[75] A. V. Ramamurthy, “Wall slip in viscous fluids and influence of materials of
construction,” J. Rheol., 30(2):337–357 (1986).
[76] A. V. Ramamurthy, “Extrudate irregularities and the polymer-metal interface
connection,” In Proceedings from the Xth International Congress on Rheology,
pages 85–90, 1988.
[77] M. Renardy, “Short wave instabilities resulting from memory slip,” J. Non-
Newtonian Fluid Mech., 35:73–76 (1990).
[78] M. Renardy, “Ill-posedness at the boundary for elastic solids sliding under
Coulomb friction,” J. Elasticity, 27:281–287 (1992).
[79] M. Renardy, “On the stability of parallel shear flow of an oldroyd-b fluid,”
Differential and Integral Equations, 6(3):481–489 (1993).
[80] M. Renardy, “High Weissenberg number boundary layers for the upper con-
vected Maxwell fluid,” J. Non-Newtonian Fluid Mech., 68:125—132 (1997).
[81] M. Renardy, “Re-entrant corner behavior of the PTT fluid,” J. Non-
Newtonian Fluid Mech., 69:99–104 (1997).
[82] M. Renardy and Y. Renardy, “Linear stability of plane Couette flow of an
upper convected Maxwell fluid,” J. Non-Newtonian Fluid Mech., 22:22–33
(1986).
[83] Y. Renardy, “Stability of the interface in two layer Couette flow of upper con-
vected Maxwell liquids,” J. Non-Newtonian Fluid Mech., 28:99–115 (1988).
[84] S. Richardson, “On the no-slip boundary condition,” J. Fluid Mech., 59:707–
719 (1973).

123
[85] J. M. H. M. Scheutjens and G. J. Fleer, “Statistical theory of the adsorption
of interacting chain molecules. 1. Partition function, segment density distri-
bution, and adsorption isotherms,” J. Phys. Chem., 83(12):1619–1635 (1979).
[86] J. M. H. M. Scheutjens and G. J. Fleer, “Statistical theory of the adsorption
of interacting chain molecules. 2. Train, loop, and tail size distribution,” J.
Phys. Chem., 84(2):178–190 (1980).
[87] J. D. Shore, D. Ronis, L. Piche, and M. Grant, “Model for melt fracture insta-
bilities in the capillary flow of polymer melts,” Phys. Rev. Lett., 77(4):655–658
(1996).
[88] J. D. Shore, D. Ronis, L. Piche, and M. Grant, “Theory of melt fracture
instabilities in the capillary flow of polymer melts,” Phys. Rev. E, 55(3):2976–
2992 (1997).
[89] C. L. Sieglaff, “Rheological properties of polyvinyl chloride,” S. P. E. Trans-
actions, 4:129–138 (1964).
[90] A. Souvaliotis and A. N. Beris, “Spectral collocation / domain decomposi-
tion method for viscoelastic flow simulations in model porous geometries,”
Comput. Methods Appl. Mech. Engrg., 129:9–28 (1996).
[91] T. Sun, A. C. Balazs, and D. Jasnow, “Dynamics of phase separation in
polymer solutions under shear flow,” Rhys. Rev. E, 55(6):6344–6347 (1997).
[92] R. Sureshkumar and A. N. Beris, “Effect of artificial stress diffusivity on the
stability of numerical calculations and the flow dynamics of time-dependent
viscoelastic flows,” J. Non-Newtonian Fluid Mech., 60(1):53–80 (1995).
[93] G. Tlapa and B. Bernstein, “Stability of a relaxation-type viscoelastic fluid
with slight elasticity,” Phys. Fluids, 13(3):565–568 (1971).

124
[94] J. P. Tordella, “Fracture in the extrusion of amorphous polymers through
capillaries,” J. App. Phys., 27(5):454–458 (1956).
[95] C. Tzoganakis, B. C. Price, and S. G. Hatzikiriakos, “Fractal analysis of the
sharkskin phenomenon in polymer melt extrusion,” J. Rheol., 37(2):355–365
(1993).
[96] C. Venet and B. Vergnes, “Experimental characterization of sharkskin in
polyethylenes,” J. Rheol., 41(4):873–892 (1997).
[97] G. V. Vinogradov and L. I. Ivanova, “Viscous properties of polymer melts
and elastomers exemplified by ethylene-propylene copolymer,” Rheol. Acta,
6:209–222 (1967).
[98] G. V. Vinogradov and L. I. Ivanova, “Wall slippage and elastic turbulence of
polymers in the rubbery state,” Rheol. Acta, 7:243–254 (1967).
[99] S.-Q. Wang and P. A. Drda, “Superfluid-like stick-slip transition in capil-
lary flow of linear polyethylene melts: I. General features,” Macromolecules,
29:2627–2632 (1996).
[100] S.-Q. Wang, P. A. Drda, and Y.-W. Inn, “Exploring molecular origins of
sharkskin, partial slip, and slope change in flow curves of linear low density
polyethylene,” J. Rheol., 40(5):875–898 (1996).
[101] S. Q. Wang and N. Plucktaveesak, “Self-oscillations in capillary flow of en-
tangled polymers,” J. Rheol., 43(2):453–460 (1999).
[102] J. L. White, M. H. Han, N. Nakajima, and R. Brzoskowski, “The influence
of materials of construction on biconical rotor and capillary measurements of
shear viscosity of rubber and its compounds and considerations of slippage,”
J. Rheol., 35(1):167–189 (1991).

125
[103] H. J. Wilson, M. Renardy, and Y. Renardy, “Structure of the spectrum in
zero Reynolds number shear flow of the UCM and Oldroyd-B liquids,” J.
Non-Newtonian Fluid Mech., 80:251–268 (1999).
[104] D. Wirtz, “Flow-induced scattering peak in the structure factor of polymer
solutions,” Phys. Rev. E, 50(3):1755–1758 (1994).
[105] X.-L. Wu, D. J. Pine, and P. K. Dixon, “Enhanced concentration fluctuations
in polymer solutions under shear flow,” Phys. Rev. Lett., 66(18):2408–2411
(1991).
[106] A. L. Yarin and M. D. Graham, “A model for slip at polymer/solid interfaces,”
J. Rheol., 42(6):1491–1504 (1998).









![arxiv.orgarXiv:0909.0532v1 [astro-ph.CO] 2 Sep 2009 The Effects of Gravitational Slip on the Higher-order Moments of the Matter Distribution Scott F. Daniel∗1 1Department of Physics](https://img.pdfslide.us/doc/110x75/600fbe8852d86f074f085e1d/arxivorg-arxiv09090532v1-astro-phco-2-sep-2009-the-eiects-of-gravitational.jpg)