Embed Size (px)
Citation preview

Notice d’installation
Traduction des instructions d’origine
Servomoteurs Kinetix VP à faible inertie avec bride de 63 à 165 mmRéférences VPL-A0631, VPL-A0632, VPL-A0633, VPL-A0751, VPL-A0752, VPL-A0753, VPL-A1001, VPL-A1002, VPL-A1003,
VPL-A1152, VPL-A1153, VPL-A1303, VPL-A1304, VPL-A1306, VPL-B0631, VPL-B0632, VPL-B0633, VPL-B0751, VPL-B0752, VPL-B0753,
VPL-B1001, VPL-B1002, VPL-B1003, VPL-B1152, VPL-B1153, VPL-B1303, VPL-B1304, VPL-B1306, VPL-B1651, VPL-B1652, VPL-B1653,
VPL-B1654
Sommaire des modificationsCette publication contient des informations nouvelles et actualisées, comme indiqué dans le tableau suivant.
À propos des moteurs Kinetix VP à faible inertieLes moteurs Kinetix® VP à faible inertie utilisent des codeurs absolus à haute -résolution monotours ou multitours et sont disponibles avec ou sans freins 24 V c.c. Ces servomoteurs sans balais compacts répondent aux exigences élevées des systèmes de commande d’axe hautes performances.
Il vous incombe d’inspecter l’équipement avant d’accepter la livraison du transporteur. Vérifiez que l’équipement livré correspond à votre bon de commande. Informez immédiatement le transporteur de tout dommage ou de tout élément manquant. Entreposez ou exploitez votre moteur dans un local propre et sec, dans les limites des conditions de la section Conditions ambiantes, page 22.
Sujet Page Sujet Page
Sommaire des modifications 1 Dimensions du moteur (brides 100 à 165 mm) 8
À propos des moteurs Kinetix VP à faible inertie 1 Caractéristiques des connecteurs 10
Description des références 2 Forces de charge nominales 11
Avant d’installer le moteur 2 Conditions ambiantes 22
Sécurité fonctionnelle 4 Accessoires moteur 22
Installation du moteur 5 Documentations connexes 23
Dimensions du moteur (brides 63 et 75 mm) 7
Sujet Page
Ajout des indicateurs de référence de sécurité -W et -Q au champ de référence de retour 2
Ajout de la rubrique Sécurité fonctionnelle 4
Mise à jour de la spécification d’humidité relative 22
Correction de la référence de kit de joint d’arbre pour les moteurs VPL-A100xx et VPL-B100xx 22
Ajout des publications Kinetix 5700 à la section Documentations connexes 23
ATTENTION : Pour éviter les blessures corporelles et les détériorations du moteur, ne soulevez pas ou ne manipulez pas le moteur par l’arbre. Le capuchon de
l’arbre risquerait de se désolidariser et de provoquer la chute du moteur.
Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Description des références
(1) Cette option de codeur est disponible uniquement avec les brides de moteurs VPL-A/B100xx, VPL-A/B115xx, VPL-A/B130xx et VPL-B165xx.(2) Cette option de codeur est disponible uniquement avec les brides de moteurs VPL-B063xx et VPL-B075xx.(3) La hiérarchie de vitesses nominales sert uniquement aux fins de comparaison. Utilisez le logiciel Motion Analyzer pour dimensionner et sélectionner les moteurs pour votre application et/ou les courbes couple/vitesse dans la
publication GMC-RM009, « Kinetix 5500 Drive System Design Guide », et la publication GMC-RM010, « Kinetix 5700 Drive System Design Guide ».
(4) Reportez-vous aux sections Dimensions du moteur (brides 63 et 75 mm), page 7, et Dimensions du moteur (brides 100 à 165 mm), page 8, pour les changements de dimensions (L, LB, LD et LE) résultant du nombre d’empilages
d’aimants.
Avant d’installer le moteurProcédez à l’inspection du matériel et lisez les consignes relatives aux joints d’arbres, aux accouplements et poulies, ainsi qu’à la prévention des parasites électriques.
1. Retirez précautionneusement le moteur de son emballage d’expédition.
2. Inspectez le moteur afin de vous assurer de l’absence de dommages.
3. Examinez l’absence de défauts au niveau de la carcasse du moteur, de l’arbre de sortie avant et du diamètre de centrage.
4. Informez immédiatement le transporteur de tout dommage.
Retrait du capuchon d’arbreRetirez le capuchon de protection installé sur l’arbre du moteur à la main ou à l’aide d’un tournevis. N’utilisez pas de marteau ou d’autres outils qui pourraient endommager l’arbre du moteur.
ATTENTION : N’essayez pas d’ouvrir et de modifier le moteur, hormis pour changer l’orientation du connecteur comme décrit page 5. Seul un technicien
Rockwell Automation qualifié peut effectuer l’entretien de ce moteur.
VP L - x xxx x x - x x 1 x A x
Options usineA = StandardS = Joint d’arbre
Bride de montageA = CEI métrique, trous de montage lisses (type FF)
Frein2 = Sans frein4 = Frein 24 V c.c.
Clavette d’arbreJ = Clavette d’arbreK = Arbre lisse
Connecteur1 = Connecteur DIN SpeedTec unique à angle droit, orientable sur 325°
CodeurC = Codeur numérique absolu 18 bits, monotour (protocole Hiperface DSL)P = Codeur numérique absolu 18 bits, multitour (4096 tours) (protocole Hiperface DSL)Q = Codeur numérique absolu 23 bits, multitour (protocole Hiperface DSL), niveau SIL 2/PLd, canal de sécurité secondaire 12 bits(1)
W = Codeur numérique absolu 18 bits, multitour (protocole Hiperface DSL), niveau SIL 2/PLd, canal de sécurité secondaire 9 bits(2)
Vitesse nominale(3)
A = 1500 tr/min D = 3000 tr/min M= 6000 tr/minB = 2000 tr/min E = 3500 tr/min T = 6750 tr/minC = 2500 tr/min F = 4500 tr/min U = 8000 tr/min
Longueur de la pile d’aimants (1, 2, 3, 4, 6 piles)(4)
Bride – Diamètre du cercle de boulonnage (BCD)063 = 63 mm 115 = 115 mm075 = 75 mm 130 = 130 mm100 = 100 mm 165 = 165 mm
Classe de tensionA = 200 V B = 400 V
Type de sérieL = Faible inertie
SérieVP = Servomoteurs rotatifs à aimant permanent optimisés pour les valeurs nominales des servovariateurs Kinetix 5500 et Kinetix 5700.
2 Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Prolongation de la durée de vie du moteur Une conception soignée et un entretien approprié peuvent accroître la durée de vie d’un servomoteur. Conformez-vous aux directives suivantes pour optimiser la durée de vie d’un servomoteur utilisé conformément aux conditions de la section Conditions ambiantes, page 22 :
• Prévoyez systématiquement une boucle d’égouttement sur le câble moteur unique, afin d’évacuer tout liquide de la connexion au moteur.• Lorsque c’est possible, prévoyez des blindages pour éviter toute contamination par des corps étrangers ou des fluides au niveau de la carcasse
du moteur, de l’arbre, des joints et de leurs raccordements.• Les joints d’arbre sont sujets à l’usure, d’où la nécessité de les inspecter et de les remplacer à intervalles réguliers. Un remplacement tous les
3 mois et n’excédant pas 12 mois est recommandé, selon les conditions d’utilisation. Pour de plus amples informations, reportez-vous à la section Kits de joint d’arbre, page 22.
• Inspectez régulièrement le moteur et les joints afin de détecter des signes de détérioration ou d’usure. Si vous constatez des dommages ou une usure excessive, remplacez l’élément.
Joints d’arbreUn joint supplémentaire est requis sur l’arbre moteur, à proximité du palier avant, si l’arbre est exposé à des quantités significatives de poussières fines ou de fluides, par ex. le lubrifiant d’un réducteur. Un indice de protection IP66 pour le moteur requiert l’utilisation d’un joint d’arbre et de connecteurs et câbles étanches.
Ce joint supplémentaire n’est pas recommandé lorsque la zone du joint d’arbre n’est pas exposée à des fluides ou de la poussière fine et lorsqu’un indice de protection inférieur suffit :
• Consultez la section Conditions ambiantes, page 22, pour une brève description de l’indice de protection IP pour ces moteurs.• Consultez la section Kits de joint d’arbre, page 22, pour les kits de joints compatibles avec votre moteur.• Consultez la publication GMC-TD001, « Kinetix Rotary Motion Specifications Technical Data », pour plus d’informations sur les câbles
série 2090 avec connecteurs étanches compatibles avec ces moteurs.
Accouplements et pouliesLes liaisons mécaniques avec l’arbre du moteur, notamment les accouplements et poulies, requièrent un accouplement rigide en torsion ou une courroie synchrone renforcée. Les performances dynamiques élevées des servomoteurs peuvent provoquer un desserrement ou un glissement progressif des accouplements, poulies ou courroies. Un accouplement desserré ou glissant peut provoquer une instabilité du système et endommager l’arbre du moteur. Toutes les liaisons entre le système et l’arbre du servomoteur doivent être rigides, afin d’obtenir une réponse acceptable du système. Inspectez périodiquement les liaisons afin de vérifier leur rigidité.
En cas de montage d’accouplements ou de poulies sur l’arbre du moteur, vérifiez le bon alignement des éléments et la conformité des charges axiale et radiale par rapport aux caractéristiques du moteur. Reportez-vous à la section Forces de charge nominales, page 11 pour des consignes permettant d’atteindre une durée de vie de 20 000 heures pour les paliers du moteur.
Prévention des parasites électriquesLes interférences électromagnétiques (EMI), appelées communément parasitage électrique, peuvent dégrader les performances du moteur. Conformez-vous aux directives suivantes pour éviter les effets des interférences électromagnétiques :
• isolez les transformateurs d’alimentation ou installez des filtres de ligne sur toutes les lignes d’alimentation c.a. ;• utilisez des câbles blindés ;• protégez les câbles de signal du câblage d’alimentation ;• n’acheminez pas les câbles moteur au-dessus des ouvertures de ventilation des servovariateurs ;• mettez à la terre tous les équipements au moyen d’un système de terre parallèle à point unique qui utilise des barrettes de masse ou de grandes
tresses.• Si nécessaire, utilisez des techniques supplémentaires de réduction des parasites électriques afin de diminuer les interférences
électromagnétiques dans les environnements bruyants.
Reportez-vous à la publication GMC-RM001, « System Design for Control of Electrical Noise Reference Manual », pour de plus amples informations sur la réduction des interférences électromagnétiques.
ATTENTION : Les paliers du moteur et le capteur de retour peuvent être endommagés en cas de choc important au niveau de l’arbre pendant l’installation des
accouplements et poulies. Le capteur de retour peut être endommagé si une force de levier est appliquée en prenant appui sur la face de montage du moteur
pour déposer des équipements montés sur l’arbre.
Ne tapez pas sur l’arbre, les accouplements ou les poulies avec des outils durant l’installation ou le démontage. Utilisez un extracteur de pignon afin d’appliquer
une pression sur l’extrémité utilisateur de l’arbre lorsque vous essayez de retirer un élément monté sur l’arbre du moteur.
Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016 3

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Installation des câblesUn cheminement judicieux et une construction soignée des câbles améliorent la compatibilité électromagnétique (CEM) du système.
Pour installer le câble moteur unique, respectez les consignes suivantes :
• privilégiez une longueur de câble la plus petite possible ;• mettez le blindage du câble à la terre afin d’éviter que les interférences électromagnétiques affectent d’autres équipements.
Sécurité fonctionnelleLes moteurs équipés d’un capteur de retour à sécurité fonctionnelle Hiperface DSL sont conçus conformément aux exigences de la documentation SICK STEGMANN GmbH suivante, afin de préserver le degré de sécurité fonctionnelle du capteur de retour associé. Reportez-vous à la section Description des références, page 2, pour plus de détails sur chaque option.
CertificationLe groupe TÜV Rheinland a homologué les servomoteurs Kinetix VP à faible inertie équipés de codeurs numériques à sécurité fonctionnelle certifiée Hiperface DSL, lesquels permettent à un système d’atteindre le degré de sécurité fonctionnelle jusqu’au Niveau de performance d (PLd) et jusqu’à la catégorie de sécurité 3 (CAT. 3) selon la norme EN ISO 13849, et le niveau SIL 2 selon les normes CEI 61508, EN 61800-5-2 et EN 62061 lorsqu’ils sont associés à des variateurs de fréquence conformes aux exigences de sécurité fonctionnelle du document HIPERFACE DSL Safety Manual (SICK STEGMANN GmbH, publication 8017596/YLR0).
Pour voir le certificat TÜV Rheinland et d’autres certifications de produits disponibles de Rockwell Automation, consultez la page http://www.rockwellautomation.com/global/certification/overview. page.
Considérations de sécurité importantesOutre le respect des instructions de ce document, vous êtes aussi responsable des aspects suivants :
• Réalisation d’une évaluation des risques au niveau de la machine.• Certification de la machine selon le niveau de performance EN ISO 13849 ou le niveau SIL EN 62061 souhaité.• Gestion de projet et test de vérification conformément à la norme EN 61800-5-2.• Le système de retour moteur de sécurité a une durée de service maximale de 20 ans. Au-delà, le système de retour doit être mis hors service.• Le système de retour moteur ne peut pas prendre en charge des fonctions de sécurité basées sur la position absolue sans mesures
supplémentaires. En présence de fonctions de sécurité basées sur la position absolue, le système de retour moteur fournit un seul canal sans diagnostic lié à la sécurité à la mise en marche. Vous devez mettre en œuvre un deuxième canal par le biais d’autres mesures.
• Le système de retour moteur n’est pas en mesure de créer indépendamment un état de sécurité pour le système de variateur. Le système de variateur crée l’état de sécurité en réponse à une erreur affichée par le système de retour moteur.
• Pour planifier et utiliser des moteurs équipés de capteurs de retour de sécurité, il faut des compétences techniques non présentées dans ce document.
ATTENTION : Le blindage extérieur du câble moteur unique doit être mis à la terre pour obtenir un signal de codeur efficace. Le signal de données du codeur est
transmis via une paire torsadée à impédance adaptée, qui requiert un blindage efficace pour des performances optimales. Vérifiez qu’il existe une connexion
efficace entre le blindage du câble et la terre du système de variateur.
ATTENTION : Une haute tension peut être présente au niveau des blindages du câble moteur unique si ceux-ci ne sont pas mis à la terre.
Vérifiez que tous les blindages du câble moteur unique sont mis à la terre.
Réf. du moteur Documentation de référence sur la sécurité fonctionnelle du capteur de retour (SICK STEGMANN GmbH)
VPL-xxxxxx-QHIPERFACE DSL Safety Manual, publication 8017596/YLR0
EFM50-2 Safe Motor Feedback Systems Operating Instructions, publication 8019321/2016-02-17
VPL-xxxxxx-W EKM36-2 Safe Motor Feedback Systems Operating Instructions, publication 8019481/2016-02-23
IMPORTANTEn accord avec le fabricant du capteur de retour, vous devez installer un système de retour moteur HIPERFACE DSL (servant de fonction de sécurité) dans une
configuration d’installation avec un indice de protection minimum IP54 conformément à la norme CEI 60529:1989 + A1:1999 + A2:2013.
ATTENTION : Pour éviter d’endommager l’équipement, ne branchez et ne débranchez pas de câbles électriques sur le système de retour moteur lorsque le
système est sous tension.
4 Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016
Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Niveau de performance (PL) et niveau d’intégrité de sécurité (SIL)Pour les systèmes de commande liés à la sécurité, la détermination des niveaux de performance (PL) selon la norme EN ISO 13849-1 et SIL selon les normes CEI EN 61508 et EN 62061 suppose une évaluation de la capacité du système à réaliser ses fonctions de sécurité. Tous les composants relatifs à la sécurité du système de commande doivent être inclus dans le cadre d’une évaluation des risques et d’une détermination des niveaux atteints.
Consultez les normes EN ISO 13849-1, CEI EN 61508 et EN 62061 pour des informations complètes sur les exigences de détermination PL et SIL.
Paramètres liés à la sécuritéUn moteur équipé d’un capteur de retour de sécurité Hiperface DSL est conçu pour maintenir le degré de sécurité fonctionnelle du capteur de retour associé. Les paramètres de sécurité des capteurs de retour sont les suivants.
Installation du moteurL’installation du moteur doit respecter toutes les réglementations locales et faire appel à des équipements et des pratiques d’installation qui favorisent la sécurité et la compatibilité électromagnétique :
• Tous les moteurs comportent un diamètre de centrage permettant l’alignement du moteur sur la machine.• Des fixations en acier inoxydable sont recommandées.
Changement de l’orientation du connecteurKinetix VP Les moteurs à faible inertie utilisent un type de connecteur qui intègre les signaux d’alimentation, de freinage et de retour dans un seul et même connecteur.- Vous pouvez identifier le type de connecteur par le nombre variable dans la référence du moteur. Par exemple, dans la référence VPL-A1303F-CJ12AA, le nombre 1- indique un connecteur SpeedTec à angle droit, orientable sur 325° (reportez-vous à Description des références, page 2).
Le boîtier de connecteur orientable permet de placer le connecteur dans la position assurant une protection optimale vis-à-vis des contaminants environnementaux et garantissant un accès aisé.
AttributRéf. du moteur
VPL-xxxxxx-Wx1xAx VPL-xxxxxx-Qx1xAx
Niveau d’intégrité de sécurité (SIL) SIL 2 (CEI 61508), SIL CL2 (EN 62061)
Probabilité de défaillance dangereuse par heure (PFH)
4,0 E-08 1/h 3,80 E-08 1/h
Catégorie de sécurité CAT. 3 (EN ISO 13849)
Niveau de performance (PL) PLd (EN ISO 13849)
ATTENTION : Des moteurs non fixés, des accouplements mécaniques désaccouplés, des clavettes d’arbre lâches et des câbles déconnectés sont dangereux lors de
la mise sous tension. Identifiez (étiquetez) les équipements démontés et limitez l’accès (condamnez) à l’alimentation électrique.
Avant de mettre le moteur sous tension, retirez la clavette d’arbre et d’autres accouplements mécaniques susceptibles d’être projetés.
ATTENTION : Vérifiez que les câbles sont installés et maintenus afin d’éviter une traction irrégulière ou une flexion au niveau du connecteur. Prévoyez un
dispositif de support à intervalles de 3 m (10 ft) tout le long du cheminement des câbles.
Une force latérale excessive et irrégulière exercée sur le connecteur du câble peut aboutir à des problèmes d’étanchéité du connecteur lors de flexions du câble.
ATTENTION : Les connecteurs sont conçus pour être orientés dans une position fixe pendant l’installation du moteur et demeurent dans cette position sans autre
réglage. Limitez strictement les forces appliquées et le nombre de rotations du connecteur afin d’être certain que les connecteurs respectent l’indice de protection
internationale (IP) décrit dans la section Conditions ambiantes, page 22.
ATTENTION : Une force excessive peut endommager le connecteur. Ne tirez pas sur le câble et n’utilisez pas d’outils, tels qu’une pince ou une pince-étau pour
tourner le connecteur. Utilisez vos mains pour faire tourner le connecteur.
Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016 5

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Respectez la procédure suivante pour modifier l’orientation du connecteur.
1. Installez et fixez correctement un câble approprié sur le connecteur de moteur.Vous disposerez ainsi d’une surface plus importante pour la saisie et cela augmente la force de levier.
2. Saisissez le connecteur raccordé et la fiche du câble avec les mains, puis tournez lentement le connecteur du moteur dans la nouvelle position.
3. Débranchez la fiche du câble une fois que le connecteur est aligné.
Installation du moteur Effectuez la procédure suivante pour installer le moteur.
1. Laissez un espace suffisant autour du moteur pour dissiper la chaleur et rester dans les limites de sa plage de températures de fonctionnement spécifiée.
Reportez-vous à la section Conditions ambiantes, page 22 pour la plage de températures de fonctionnement. Ne placez pas le moteur dans une enceinte sauf si celle-ci dispose d’une source d’air pulsé pour refroidir le moteur. Un ventilateur diffusant de l’air sur le moteur améliore ses performances. Placez les autres appareils producteurs de chaleur à distance du moteur.
2. Reportez-vous à la section Forces de charge nominales, page 11 pour déterminer les limitations de charge d’arbre radiale et axiale pour votre moteur.
3. Installez le moteur avec le connecteur orienté au-dessous de la carcasse du moteur.
Cette position peut assurer une meilleure protection environnementale du connecteur.
4. Montez et alignez le moteur.
5. Fixez le câble moteur unique qui transmet les signaux d’alimentation, de retour et de freinage comme décrit ci-dessous.a. Alignez soigneusement le connecteur du câble avec le connecteur de moteur.
La surface plane en haut du connecteur du moteur et les surfaces planes sur le connecteur du câble doivent être alignées afin que les deux connecteurs soient appariés.
b. Serrez à la main le collier moleté d’un quart de tour afin de d’engager complètement le connecteur du câble.-
c. Prévoyez une boucle d’égouttement sur le câble, afin d’évacuer tout liquide des connecteurs.
ATTENTION : Les paliers du moteur et le capteur de retour peuvent être endommagés en cas de choc important au niveau de l’arbre pendant l’installation des
accouplements et poulies. Le capteur de retour peut être endommagé si une force de levier est appliquée en prenant appui sur la face de montage du moteur
pour déposer des équipements montés sur l’arbre.
Ne tapez pas sur l’arbre, les accouplements ou les poulies avec des outils durant l’installation ou le démontage. Utilisez un extracteur de pignon afin d’appliquer
une pression sur l’extrémité utilisateur de l’arbre lorsque vous essayez de retirer un élément monté sur l’arbre du moteur.
RISQUE DE BRÛLURE : Les surfaces extérieures du moteur peuvent atteindre une température élevée de 125 °C (257 °F) pendant le fonctionnement.
Prenez toutes les précautions nécessaires pour éviter tout contact accidentel avec les surfaces chaudes. Tenez compte de la température superficielle du
moteur lors du choix des câbles et connexions de raccordement.
ATTENTION : Les connecteurs à détrompage doivent être alignés correctement et serrés à la main.
N’utilisez pas d’outils ou n’exercez pas une force excessive lors de l’engagement du câble sur le connecteur de moteur. Si les connecteurs ne concordent
pas en appliquant une légère force manuelle, réalignez-les et réessayez.
ATTENTION : Le blindage extérieur du câble moteur unique doit être mis à la terre pour obtenir un signal de codeur efficace.
Le signal de données du codeur est transmis via une paire torsadée à impédance adaptée, qui requiert un blindage efficace pour des performances
optimales.
Vérifiez qu’il existe une connexion efficace entre le blindage du câble moteur unique et la terre du système variateur.
6 Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016
Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
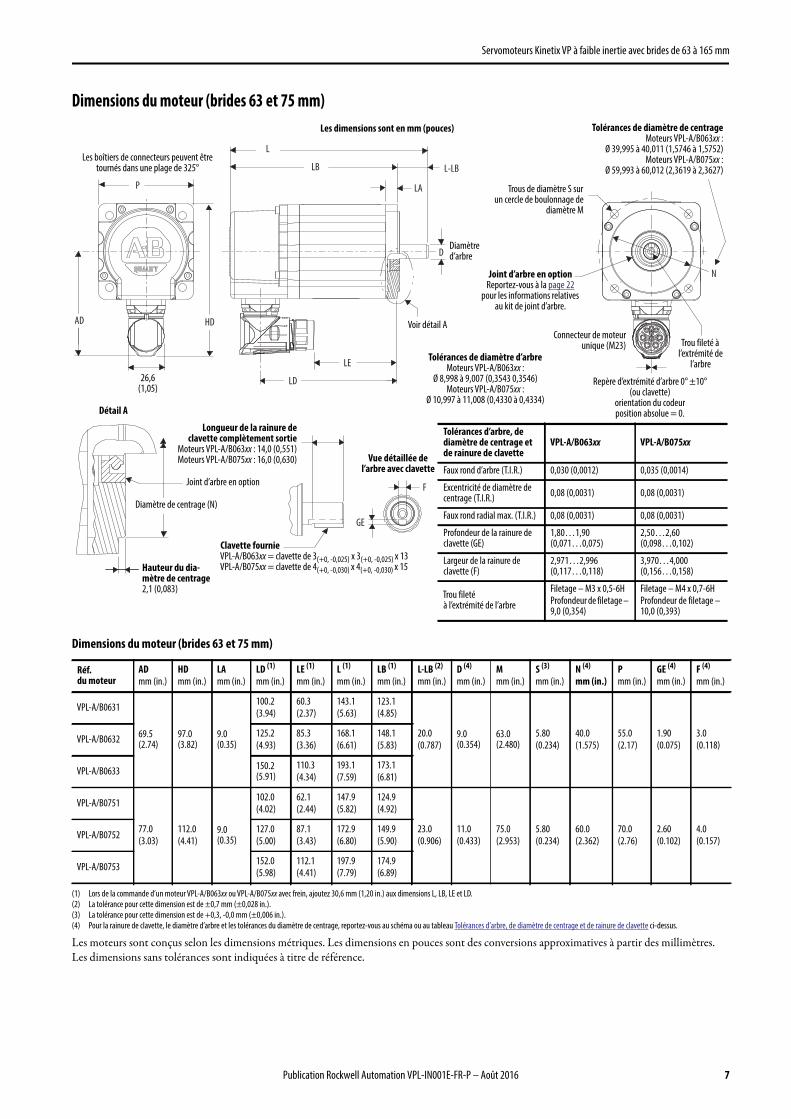
Dimensions du moteur (brides 63 et 75 mm)
Dimensions du moteur (brides 63 et 75 mm)
Les moteurs sont conçus selon les dimensions métriques. Les dimensions en pouces sont des conversions approximatives à partir des millimètres. Les dimensions sans tolérances sont indiquées à titre de référence.
Réf.du moteur
ADmm (in.)
HDmm (in.)
LAmm (in.)
LD (1)
mm (in.)
(1) Lors de la commande d’un moteur VPL-A/B063xx ou VPL-A/B075xx avec frein, ajoutez 30,6 mm (1,20 in.) aux dimensions L, LB, LE et LD.
LE (1)
mm (in.)
L (1)
mm (in.)
LB (1)
mm (in.)
L-LB (2)
mm (in.)
(2) La tolérance pour cette dimension est de ±0,7 mm (±0,028 in.).
D (4)
mm (in.)
Mmm (in.)
S (3)
mm (in.)
(3) La tolérance pour cette dimension est de +0,3, -0,0 mm (±0,006 in.).
N (4)
mm (in.)Pmm (in.)
GE (4)
mm (in.)
(4) Pour la rainure de clavette, le diamètre d’arbre et les tolérances du diamètre de centrage, reportez-vous au schéma ou au tableau Tolérances d’arbre, de diamètre de centrage et de rainure de clavette ci-dessus.
F (4)
mm (in.)
VPL-A/B0631
69.5(2.74)
97.0(3.82)
9.0(0.35)
100.2
(3.94)
60.3
(2.37)
143.1
(5.63)
123.1
(4.85)
20.0
(0.787)9.0(0.354)
63.0(2.480)
5.80
(0.234)
40.0
(1.575)
55.0
(2.17)
1.90
(0.075)
3.0
(0.118)VPL-A/B0632
125.2
(4.93)
85.3
(3.36)
168.1
(6.61)
148.1
(5.83)
VPL-A/B0633150.2(5.91)
110.3
(4.34)
193.1
(7.59)
173.1
(6.81)
VPL-A/B0751
77.0
(3.03)
112.0
(4.41)9.0(0.35)
102.0
(4.02)
62.1
(2.44)
147.9
(5.82)
124.9
(4.92)
23.0
(0.906)
11.0
(0.433)
75.0
(2.953)
5.80
(0.234)
60.0
(2.362)
70.0
(2.76)
2.60
(0.102)
4.0
(0.157)VPL-A/B0752
127.0
(5.00)
87.1
(3.43)
172.9
(6.80)
149.9
(5.90)
VPL-A/B0753152.0
(5.98)
112.1
(4.41)
197.9
(7.79)
174.9
(6.89)
N
LD
HD
P
26.6 (1.05)
AD
LA
LB L-LB
L
D
LE
LD
F
GE
Voir détail A
Vue détaillée de l’arbre avec clavette
Tolérances de diamètre d’arbreMoteurs VPL-A/B063xx :
Ø 8,998 à 9,007 (0,3543 0,3546)Moteurs VPL-A/B075xx :
Ø 10,997 à 11,008 (0,4330 à 0,4334)Détail A
Diamètred’arbre
Joint d’arbre en optionReportez-vous à la page 22
pour les informations relatives au kit de joint d’arbre.
Connecteur de moteurunique (M23)
Trous de diamètre S surun cercle de boulonnage de
diamètre M
Les dimensions sont en mm (pouces)
Les boîtiers de connecteurs peuvent être tournés dans une plage de 325°
Tolérances de diamètre de centrageMoteurs VPL-A/B063xx :
Ø 39,995 à 40,011 (1,5746 à 1,5752)Moteurs VPL-A/B075xx :
Ø 59,993 à 60,012 (2,3619 à 2,3627)
Tolérances d’arbre, de diamètre de centrage et de rainure de clavette
VPL-A/B063xx VPL-A/B075xx
Faux rond d’arbre (T.I.R.) 0,030 (0,0012) 0,035 (0,0014)
Excentricité de diamètre de centrage (T.I.R.)
0,08 (0,0031) 0,08 (0,0031)
Faux rond radial max. (T.I.R.) 0,08 (0,0031) 0,08 (0,0031)
Profondeur de la rainure de clavette (GE)
1,80…1,90(0,071…0,075)
2,50…2,60(0,098…0,102)
Largeur de la rainure de clavette (F)
2,971…2,996(0,117…0,118)
3,970…4,000(0,156…0,158)
Trou filetéà l’extrémité de l’arbre
Filetage – M3 x 0,5-6H
Profondeur de filetage – 9,0 (0,354)
Filetage – M4 x 0,7-6H
Profondeur de filetage – 10,0 (0,393)
Clavette fournieVPL-A/B063xx = clavette de 3(+0, -0,025) x 3(+0, -0,025) x 13VPL-A/B075xx = clavette de 4(+0, -0,030) x 4(+0, -0,030) x 15
Diamètre de centrage (N)
Joint d’arbre en option
Longueur de la rainure declavette complètement sortie
Moteurs VPL-A/B063xx : 14,0 (0,551)Moteurs VPL-A/B075xx : 16,0 (0,630)
Hauteur du dia-mètre de centrage 2,1 (0,083)
Repère d’extrémité d’arbre 0° ±10° (ou clavette)
orientation du codeurposition absolue = 0.
Trou fileté à l’extrémité de
l’arbre
26,6 (1,05)
Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016 7

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Dim
ensio
ns du
mot
eur (
bride
s 100
à 16
5 mm
)
LA
LB
T
L-LB
ADHD
L
LE26
.6 (1
.05)
LD
P
F
GE
DN
45.0
(1.77
)
LE
ADHD
LD
Tolé
ranc
es d
’arbr
e, d
e di
amèt
re d
e cen
trag
e et
de ra
inur
e de c
lave
tte
VPL-A
/B10
0xx
VPL-A
/B11
5xx
VPL-A
/B13
0xx
VPL-B
165xx
Faux
rond
d’a
rbre
(T.I.
R.)
0,04
(0,0
016)
Exce
ntric
ité d
e di
amèt
re d
e ce
ntra
ge (T
.I.R.
)0,
078
(0,0
031)
Faux
rond
radi
al m
ax. (
T.I.R
.)0,
078
(0,0
031)
Prof
onde
ur d
e la
rain
ure
de
clav
ette
(GE)
3,00
…3,
10(0
,118
…0,
122)
3,50
…3,
60(0
,138
…0,
142)
4,00
…4,
20(0
,158
…0,
165)
Larg
eur d
e la
rain
ure
de
clav
ette
(F)
4,97
…5,
00(0
,196
…0,
197)
5,97
…6,
00(0
,235
…0,
236)
7,96
…8,
00(0
,314
…0,
315)
Voir
déta
il A
Clav
ette
four
nie
VPL-
A/B1
00xx
= c
lave
tte
de 5
(+0,
-0,0
30) x
5(+
0, -0
,030
) x 24
VPL-
A/B1
15xx
= c
lave
tte
de 6
(+0,
-0,0
30) x
6 (+0,
-0,0
30) x
24VP
L-A/
B130xx
= c
lave
tte
de 8
(+0,
-0,0
36) x
7(+
0, -0
,090
) x 31
VPL-
B165xx
= c
lave
tte
de 8
(+0,
-0,0
36) x
7(+
0, -0
,090
) x 39
Vue d
étai
llée d
e l’ar
bre a
vec c
lave
tte
VPL-
A/B1
00xx
= Ø
15,
997
à 16
,008
(0,6
298
à 0,
6301
)VP
L-A/
B115xx
= Ø
18,
996
à 19
,009
(0,7
479
à 0,
7483
)VP
L-A/
B130xx
= Ø
23,
996
à 24
,009
(0,9
448
à 0,
9451
)VP
L-B1
65xx
= Ø
27,
996
à 28
,009
(1,1
022
à 1,
1027
)
Déta
il A
Tolé
ranc
es d
e dia
mèt
re d
’arbr
e
Dia
mèt
re
d’ar
bre
Trou
s de
diam
ètre
S su
run
cer
cle
de b
oulo
nnag
e de
diam
ètre
M.
Trou
file
té à
l’ext
rém
ité d
e l’ar
bre
Mot
eurs
VPL
-A/B
100xx :
File
tage
– M
5 x
0,8-
6HPr
ofon
deur
de
filet
age
– 1
2,5
(0,4
9)M
oteu
rs V
PL-A
/B11
5xx :
File
tage
– M
6 x
1,0-
6HPr
ofon
deur
de
filet
age
– 1
6,0
(0,6
3)M
oteu
rs V
PL-A
/B13
0xx :
File
tage
– M
8 x
1,25
-6H
Prof
onde
ur d
e fil
etag
e –
19,
1 (0
,75)
Mot
eurs
VPL
-B16
5xx :
File
tage
– M
10 x
1,5
-6H
Prof
onde
ur d
e fil
etag
e –
22,
1 (0
,87)
Join
t d’ar
bre e
n op
tion
Repo
rtez
-vou
s à la
se
ctio
n pa
ge 2
2, p
our l
es
info
rmat
ions
de
kit d
e jo
int d
’arb
re.
Les d
imen
sions
sont
en m
m (p
ouce
s)
Conn
ecte
ur d
em
oteu
r uni
que
Orie
ntat
ion
du
conn
ecte
ursu
r 325
°
Diam
ètre
de l
’évid
emen
t du
diam
ètre
de c
entr
age
Mot
eurs
VPL
-A/B
100xx =
Ø 5
3,3
(2,1
0)M
oteu
rs V
PL-A
/B11
5xx =
Ø 5
9,7
(2,3
5)M
oteu
rs V
PL-A
/B13
0xx =
Ø 7
1,1
(2,8
0)M
oteu
rs V
PL-B
165xx =
Ø 8
1,0
(3,1
9)
Long
ueur
de l
a rai
nure
de c
lave
tte
VPL-
A/B1
00xx
= 2
5,4
(1,0
0)VP
L-A/
B115xx
= 2
5,4
(1,0
0)VP
L-A/
B130xx
= 3
2,3
(1,2
7)VP
L-B1
65xx
= 4
1,1
(1,6
2)
Dia
mèt
re d
e ce
ntra
ge (N
)
Dia
mèt
re d
e l’é
vide
men
t du
diam
ètre
de
cent
rage
Épau
lem
ent d
’arbr
e en
affle
urem
ent a
vec
la h
aute
ur d
e dia
mèt
re d
e cen
trag
e±
0,83
(0,0
33)
Haut
eur d
u di
amèt
re d
e cen
trag
eVP
L-A/
B100xx
= 2
,87
(0,1
13)
VPL-
A/B1
15xx
= 2
,87
(0,1
13)
VPL-
A/B1
30xx
= 3
,38
(0,1
33)
VPL-
B165xx
= 3
,38
(0,1
33)
Surf
ace d
’étan
chéi
téVP
L-A/
B100xx
= 1
6,94
(0,6
67)(1
)
VPL-
A/B1
15xx
= 1
9,94
(0,7
85)(1
)
VPL-
A/B1
30xx
= 2
4,94
(0,9
82)(2
)
VPL-
B165xx
= 2
9,92
(1,1
78)(2
)
Hau
teur
de
l’évi
dem
ent d
u di
amèt
re d
e ce
ntra
ge (T
)
Hau
teur
du
diam
ètre
de
cen
trag
e
Tolé
ranc
es d
e dia
mèt
re d
e cen
trag
eM
oteu
rs V
PL-A
/B10
0xx :
Ø 79
,993
à 8
0,01
2 (3
,149
3 à
3,15
01)
Mot
eurs
VPL
-A/B
115xx :
Ø 94
,991
à 9
5,01
3 (3
,739
8 à
3,74
07)
Mot
eurs
VPL
-A/B
130xx :
Ø 10
9,99
1 à
110,
013
(4,3
303
à 4,
3312
)M
oteu
rs V
PL-B
165xx :
Ø 12
9,99
1 à
130,
014
(5,1
178
à 5,
1187
)
(1)
La to
léra
nce
est ±
0,05
(±0,
002)
.
(2)
La to
léra
nce
est ±
0,83
(±0,
033)
.
Conn
ecte
urs M
40
(néc
essi
te u
n câ
ble
de
calib
re 1
0 AW
G)po
ur le
s mot
eurs
VP
L-B1
654D
.
Conn
ecte
urs M
23
pour
tous
les a
utre
s m
oteu
rs d
esé
rie V
PL.
Conn
ecte
urs s
ur le
s mot
eurs
VP
L-B1
65xx
Réf.
du m
oteu
r
Conn
ecte
ur M
23
VPL-
B165
1x
VPL-
B165
2x
VPL-
B165
3x
VPL-
B165
4B
Conn
ecte
ur M
40VP
L-B1
654D
Repè
re d
’ext
rém
ité d
’arb
re 0
° ±10
° (o
u cl
avet
te)
orie
ntat
ion
du c
odeu
rpo
sitio
n ab
solu
e =
0.
26,6
(1,0
5)
45,0
(1,7
7)
8 Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016
Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Dim
ensio
ns d
u m
oteu
r (br
ides
100 à
165 m
m)
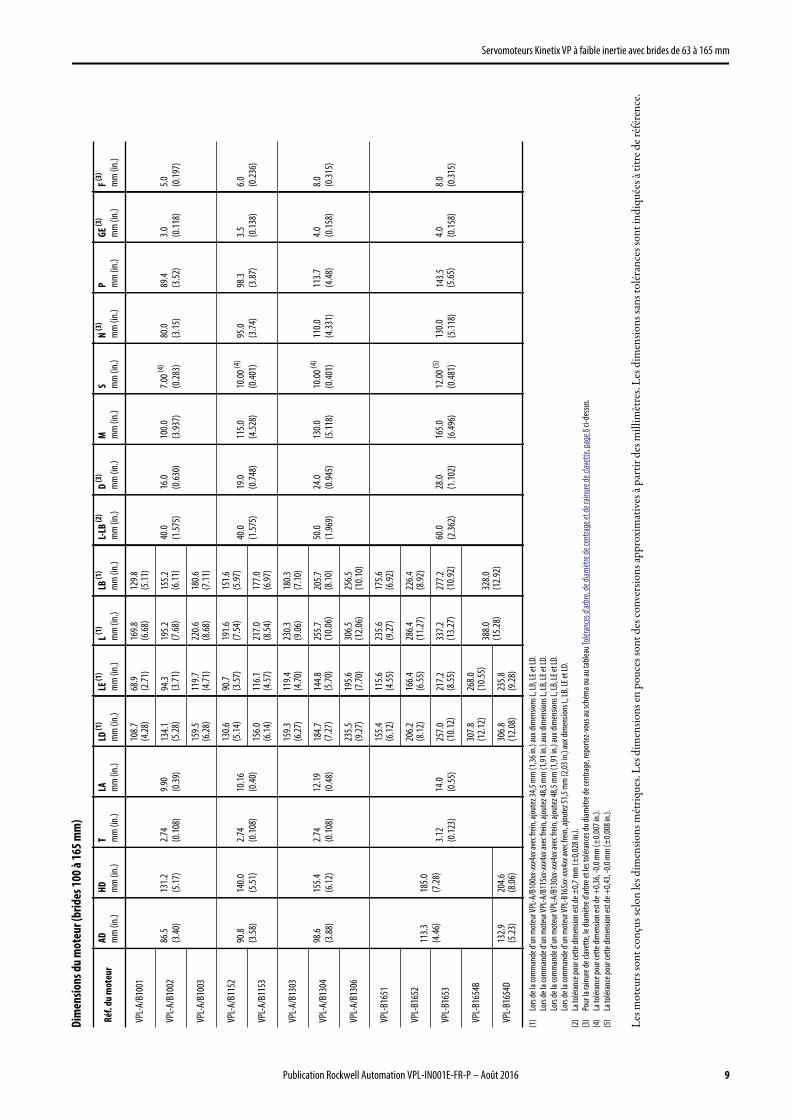
Les m
oteu
rs so
nt co
nçus
selo
n le
s dim
ensio
ns m
étriq
ues.
Les d
imen
sions
en p
ouce
s son
t des
conv
ersio
ns ap
prox
imat
ives
à pa
rtir
des m
illim
ètre
s. Le
s dim
ensio
ns sa
ns to
léran
ces s
ont i
ndiq
uées
à tit
re d
e réf
éren
ce.
Réf.
du m
oteu
rAD m
m (i
n.)
HD mm
(in.
)
T mm
(in.
)
LA mm
(in.
)
LD (1
)
mm
(in.
)
(1)
Lors
de
la c
omm
ande
d’u
n m
oteu
r VPL
-A/B
100xx-xxx4xx
ave
c fr
ein,
ajo
utez
34,
5 m
m (1
,36
in.)
aux
dim
ensi
ons L
, LB,
LE
et L
D.
Lors
de
la c
omm
ande
d’u
n m
oteu
r VPL
-A/B
115xx-xxx4xx
ave
c fr
ein,
ajo
utez
48,
5 m
m (1
,91
in.)
aux
dim
ensi
ons L
, LB,
LE
et L
D.
Lors
de
la c
omm
ande
d’u
n m
oteu
r VPL
-A/B
130xx-xxx4xx
ave
c fr
ein,
ajo
utez
48,
5 m
m (1
,91
in.)
aux
dim
ensi
ons L
, LB,
LE
et L
D.
Lors
de
la c
omm
ande
d’u
n m
oteu
r VPL
-B16
5xx-xxx4xx
ave
c fr
ein,
ajo
utez
51,
5 m
m (2
,03
in.)
aux
dim
ensi
ons L
, LB,
LE
et L
D.
LE (1
)
mm
(in.
)
L (1)
mm
(in.
)
LB (1
)
mm
(in.
)
L-LB
(2)
mm
(in.
)
(2)
La to
léra
nce
pour
cet
te d
imen
sion
est
de
±0,
7 m
m (±
0,02
8 in
.).
D (3
)
mm
(in.
)
(3)
Pour
la ra
inur
e de
cla
vett
e, le
dia
mèt
re d
’arb
re e
t les
tolé
ranc
es d
u di
amèt
re d
e ce
ntra
ge, r
epor
tez-
vous
au
sché
ma
ou a
u ta
blea
u To
léra
nces
d’a
rbre
, de
diam
ètre
de
cent
rage
et d
e ra
inur
e de
cla
vett
e, p
age
8 ci
-des
sus.
M mm
(in.
)
S mm
(in.
)
N (3
)
mm
(in.
)
P mm
(in.
)
GE (3
)
mm
(in.
)
F (3)
mm
(in.
)
VPL-
A/B1
001
86.5
(3.4
0)
131.
2
(5.1
7)
2.74
(0.1
08)
9.90
(0.3
9)
108.
7(4
.28)
68.9
(2.7
1)16
9.8
(6.6
8)12
9.8
(5.1
1)
40.0
(1.5
75)
16.0
(0.6
30)
100.
0
(3.9
37)
7.00
(4)
(0.2
83)
(4)
La to
léra
nce
pour
cet
te d
imen
sion
est
de
+0,
36, -
0,0
mm
(±0,
007
in.).
80.0
(3.1
5)
89.4
(3.5
2)
3.0
(0.1
18)
5.0
(0.1
97)
VPL-
A/B1
002
134.
1(5
.28)
94.3
(3.7
1)19
5.2
(7.6
8)15
5.2
(6.1
1)
VPL-
A/B1
003
159.
5(6
.28)
119.
7(4
.71)
220.
6(8
.68)
180.
6(7
.11)
VPL-
A/B1
152
90.8
(3.5
8)
140.
0
(5.5
1)
2.74
(0.1
08)
10.1
6
(0.4
0)
130.
6(5
.14)
90.7
(3.5
7)19
1.6
(7.5
4)15
1.6
(5.9
7)40
.0
(1.5
75)
19.0
(0.7
48)
115.
0
(4.5
28)
10.0
0 (4
)
(0.4
01)
95.0
(3.7
4)
98.3
(3.8
7)
3.5
(0.1
38)
6.0
(0.2
36)
VPL-
A/B1
153
156.
0(6
.14)
116.
1(4
.57)
217.
0(8
.54)
177.
0(6
.97)
VPL-
A/B1
303
98.6
(3.8
8)
155.
4
(6.1
2)
2.74
(0.1
08)
12.1
9
(0.4
8)
159.
3(6
.27)
119.
4(4
.70)
230.
3(9
.06)
180.
3(7
.10)
50.0
(1.9
69)
24.0
(0.9
45)
130.
0
(5.1
18)
10.0
0 (4
)
(0.4
01)
110.
0
(4.3
31)
113.
7
(4.4
8)
4.0
(0.1
58)
8.0
(0.3
15)
VPL-
A/B1
304
184.
7(7
.27)
144.
8(5
.70)
255.
7(1
0.06
)20
5.7
(8.1
0)
VPL-
A/B1
306
235.
5(9
.27)
195.
6(7
.70)
306.
5(1
2.06
)25
6.5
(10.
10)
VPL-
B165
1
113.
3
(4.4
6)
185.
0
(7.2
8)3.
12
(0.1
23)
14.0
(0.5
5)
155.
4(6
.12)
115.
6(4
.55)
235.
6(9
.27)
175.
6(6
.92)
60.0
(2.3
62)
28.0
(1.1
02)
165.
0
(6.4
96)
12.0
0 (5
)
(0.4
81)
(5)
La to
léra
nce
pour
cet
te d
imen
sion
est
de
+0,
43, -
0,0
mm
(±0,
008
in.).
130.
0
(5.1
18)
143.
5(5
.65)
4.0
(0.1
58)
8.0
(0.3
15)
VPL-
B165
220
6.2
(8.1
2)16
6.4
(6.5
5)28
6.4
(11.
27)
226.
4(8
.92)
VPL-
B165
325
7.0
(10.
12)
217.
2(8
.55)
337.
2(1
3.27
)27
7.2
(10.
92)
VPL-
B165
4B30
7.8
(12.
12)
268.
0(1
0.55
)38
8.0
(15.
28)
328.
0(1
2.92
)VP
L-B1
654D
132.
9(5
.23)
204.
6(8
.06)
306.
8(1
2.08
)23
5.8
(9.2
8)
Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016 9
Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
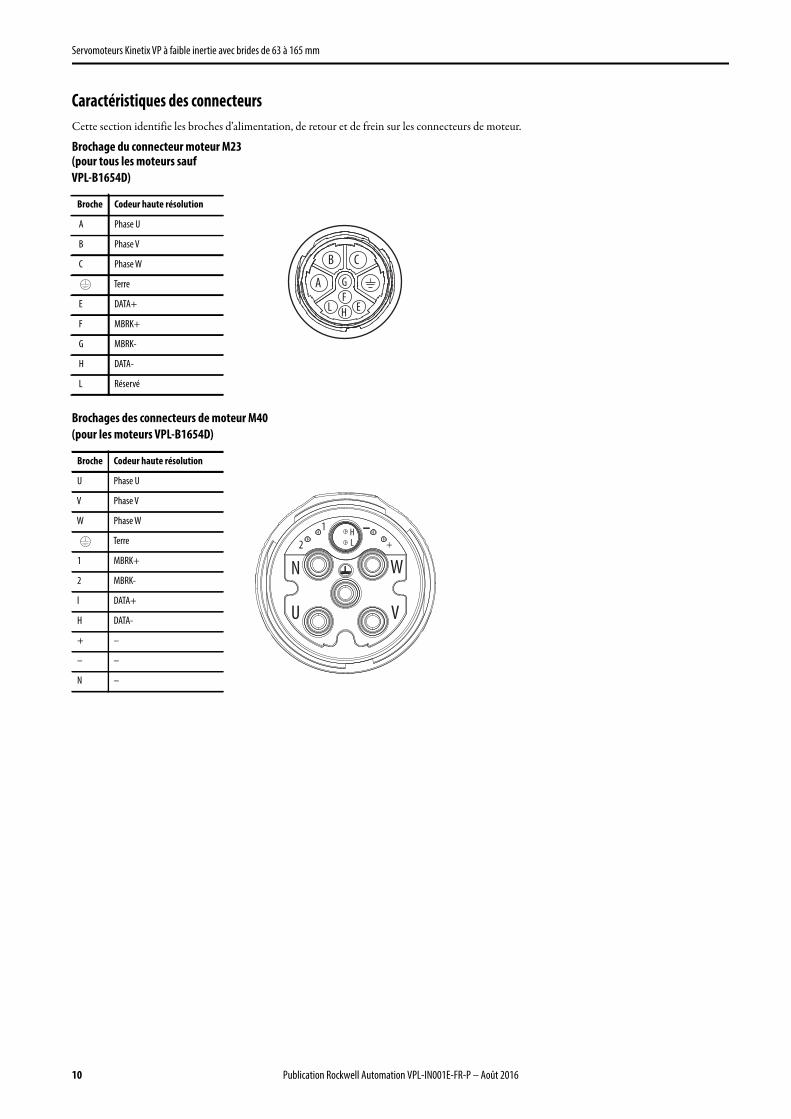
Caractéristiques des connecteursCette section identifie les broches d’alimentation, de retour et de frein sur les connecteurs de moteur.
Brochage du connecteur moteur M23(pour tous les moteurs sauf VPL-B1654D)
Brochages des connecteurs de moteur M40(pour les moteurs VPL-B1654D)
Broche Codeur haute résolution
A Phase U
B Phase V
C Phase W
Terre
E DATA+
F MBRK+
G MBRK-
H DATA-
L Réservé
Broche Codeur haute résolution
U Phase U
V Phase V
W Phase W
Terre
1 MBRK+
2 MBRK-
l DATA+
H DATA-
+ –
– –
N –
A
B C
G
HL EF
N
U V
WLH1
+2
10 Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Forces de charge nominalesLes moteurs sont capables de fonctionner avec une charge d’arbre soutenue. La zone d’application et la direction des forces de charge axiales et radiales sont indiquées sur la figure, et les valeurs nominales de charge maximale sont indiquées dans le tableau.
Forces de charge sur l’arbre
Les tableaux suivants correspondent à une durée de vie de roulement L10 de 20 000 heures à différentes charges et vitesses. La durée de vie de palier de 20 000 heures ne prend pas en compte l’éventuelle réduction de vie spécifique à l’application, notamment en cas de contamination extérieure de la graisse de palier.
Moteurs Kinetix à faible inertie (brides 63 et 75 mm)
Forces nominales de charge radiale (maximum) pour les moteurs sans frein
Réf. du moteur(1)
(1) 1,0 kgf = 2,2 lbf ou 9,8 N. Un astérisque (*) indique une charge nominale mesurée à une valeur de tr/min inférieure à la valeur indiquée pour cette colonne.
Vitesse, max. tr/min
tr/min
500kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
6000kgf
6500kgf
7000kgf
7500kgf
8000kgf
VPL-A0631E 4500 – 26.7 – – 20.8 * 18.5 – – 16.2 – – – – – –
VPL-A0631M 7200 – – 23.3 – 19.7 – – – 16.7 * – – – – 13.8 –
VPL-A0632F 4800 – 28.9 25.2 – – 21.0 * – – – 17.1 * – – – – –
VPL-A0633C 3000 38.1 30.3 27.4 * – – 21.0 – – – – – – – – –
VPL-A0633F 4500 38.1 – 26.4 – – 21.0 – – 18.3 – – – – – –
VPL-A0751E 4800 33.3 26.4 – – 20.6 * – – – – 15.7 * – – – – –
VPL-A0752C 3300 36.1 28.6 25.9 * – – – 19.2 * – – – – – – – –
VPL-A0752E 4800 36.1 28.6 – – 21.8 * – – – – 17.0 * – – – – –
VPL-A0753C 3300 37.8 30.0 27.5 * – – – 20.2 * – – – – – – – –
VPL-A0753E 4600 37.8 30.0 – – 23.3 * – – – – 18.0 * – – – – –
VPL-B0631T 8000 – – 23.3 – – 18.5 – – – – 14.9 * – – – 13.3
VPL-B0631U 8000 – – 23.3 – – 18.5 – – – 15.6 – – – – 13.3
VPL-B0632F 4800 – 28.9 25.2 – – 21.0 * – – – 17.1 * – – – – –
VPL-B0632T 8000 – – – 22.9 – – – 18.2 – – – 15.6 * – – 14.4
VPL-B0633M 6900 – 30.3 – 24.0 – – – 19.2 * – – – – 15.9 * – –
VPL-B0633T 8000 – – 26.4 – – 21.0 – – – – 16.8 * – – – 15.1
VPL-B0751M 8000 – – 23.1 – – 18.3 – – – 15.7 * – – – – 13.2
VPL-B0752E 4800 36.1 28.6 – – 22.0 * – – – – 17.0 * – – – – –
VPL-B0752F 7000 – 28.6 – 22.7 – – 19.3 * – – – – – 15.0 – –
VPL-B0752M 8000 – – 25.0 – – 20.8 – – – 16.8 * – – – – 14.3
VPL-B0753E 4500 37.8 30.0 – 23.8 – – – – 18.2 – – – – – –
VPL-B0753F 6500 – 30.0 – 23.8 – 20.6 * – – – – 16.1 – – –
VPL-B0753M 8000 – – 26.2 – – 19.8 – – – 18.0 * – – – – 15.0
La force de charge axiale appliquée au centre de l’arbre.
La force de charge radiale appliquée au point central de l’extension d’arbre.
Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016 11

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Forces nominales de charge axiale (charge radiale maximum) pour les moteurs sans frein
Réf. du moteur(1)
(1) 1,0 kgf = 2,2 lbf ou 9,8 N. Un astérisque (*) indique une charge nominale mesurée à une valeur de tr/min inférieure à la valeur indiquée pour cette colonne.
Vitesse, max. tr/min
tr/min
500kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
6000kgf
6500kgf
7000kgf
7500kgf
8000kgf
VPL-A0631E 4500 – 22.3 – – 16.1 * 13.8 – – 11.6 – – – – – –
VPL-A0631M 7200 – – 18.7 – 15.0 – – – 12.1 * – – – – 9.5 * –
VPL-A0632F 4800 – 23.5 19.7 – – 15.5 * – – – 11.9 * – – – – –
VPL-A0633C 3000 32.7 24.2 21.3 * – – 15.0 – – – – – – – – –
VPL-A0633F 4500 32.7 – 20.3 – – 15.0 – – 12.6 – – – – – –
VPL-A0751E 4800 30.0 22.2 – – 16.1 * – – – – 11.2 * – – – – –
VPL-A0752C 3300 31.5 23.3 20.5 * – – – 13.9 * – – – – – – – –
VPL-A0752E 4800 31.5 23.3 – – 16.4 * – – – – 11.8 * – – – – –
VPL-A0753C 3300 32.5 24.1 21.5 * – – – 14.3 * – – – – – – – –
VPL-A0753E 4600 32.5 24.1 – – 17.3 * – – – – 12.4 * – – – – –
VPL-B0631T 8000 – – 18.7 – – 13.8 – – – – 10.5 * – – – 9.0
VPL-B0631U 8000 – – 18.7 – – 13.8 – – – 11.1 – – – – 9.0
VPL-B0632F 4800 – 23.5 19.7 – – 15.5 * – – – 11.9 * – – – – –
VPL-B0632T 8000 – – – 17.4 – – – 12.9 – – – 10.6 – – 9.5
VPL-B0633M 6900 – 24.2 – 17.9 – – – 13.4 * – – – – 10.5 * – –
VPL-B0633T 8000 – – 20.3 – – 15.0 – – – – 11.3 * – – – 9.8
VPL-B0751M 8000 – – 18.6 – – 13.8 – – – 11.2 * – – – – 9.0
VPL-B0752E 4800 31.5 23.3 – – 16.6 * – – – – 11.8 * – – – – –
VPL-B0752F 7000 – 23.3 – 17.3 – – 14.0 * – – – – – 10.0 – –
VPL-B0752M 8000 – – 19.6 – – 14.5 – – – 11.7 * – – – – 9.5
VPL-B0753E 4500 32.5 24.1 – 17.8 – – – – 12.5 – – – – – –
VPL-B0753F 6500 – 24.1 – 17.8 – – 14.7 * – – – – 10.7 – – –
VPL-B0753M 8000 – – 20.2 – – 14.9 – – – 12.4 * – – – – 9.8
Forces nominales de charge axiale (charge radiale nulle) pour les moteurs sans frein
Réf. du moteur(1)
Vitesse, max. tr/min
tr/min
500kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
6000kgf
6500kgf
7000kgf
7500kgf
8000kgf
VPL-A0631E 4500 – 27.5 – – 19.9 * 17.1 – – 14.3 – – – – – –
VPL-A0631M 7200 – – 23.0 – 18.5 – – – 14.9 * – – – – 11.7 * –
VPL-A0632F 4800 – 27.5 23.0 – – 18.1 * – – – 13.9 * – – – – –
VPL-A0633C 3000 37.1 27.5 24.1 * – – 17.1 – – – – – – – – –
VPL-A0633F 4500 37.1 – 23.0 – – 17.1 – – 14.3 – – – – – –
VPL-A0751E 4800 37.1 27.5 – – 19.9 * – – – – 13.9 * – – – – –
VPL-A0752C 3300 37.1 27.5 24.1 * – – – 16.4 * – – – – – – – –
VPL-A0752E 4800 37.1 27.5 – – 19.3 * – – – – 13.9 * – – – – –
VPL-A0753C 3300 37.1 27.5 24.5 * – – – 16.4 * – – – – – – – –
VPL-A0753E 4600 37.1 27.5 – – 19.7 * – – – – 14.2 * – – – – –
VPL-B0631T 8000 – – 23.0 – – 17.1 – – – – 12.9 * – – – 11.1
VPL-B0631U 8000 – – 23.0 – – 17.1 – – – 13.7 – – – – 11.1
VPL-B0632F 4800 – 27.5 23.0 – – 18.1 * – – – 13.9 * – – – – –
VPL-B0632T 8000 – – – 20.3 – – – 15.1 – – – 12.4 * – – 11.1
12 Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Forces nominales de charge radiale (maximum) pour les moteurs avec frein
VPL-B0633M 6900 – 27.5 – 20.3 – – – 15.2 * – – – – 11.9 * – –
VPL-B0633T 8000 – – 23.0 – – 17.1 – – – – 12.8 * – – – 11.1
VPL-B0751M 8000 – – 23.0 – – 17.1 – – – 13.9 * – – – – 11.1
VPL-B0752E 4800 37.1 27.5 – – 19.5 * – – – – 13.9 * – – – – –
VPL-B0752F 7000 – 27.5 – 20.3 – – 16.5 * – – – – – 11.8 – –
VPL-B0752M 8000 – – 23.0 – – 17.1 – – – 13.8 * – – – – 11.1
VPL-B0753E 4500 37.1 27.5 – 20.3 – – – – 14.3 – – – – – –
VPL-B0753F 6500 – 27.5 – 20.3 – – 16.8 * – – – – 12.2 – – –
VPL-B0753M 8000 – – 23.0 – – 17.1 – – – 14.2 * – – – – 11.1
(1) 1,0 kgf = 2,2 lbf ou 9,8 N. Un astérisque (*) indique une charge nominale mesurée à une valeur de tr/min inférieure à la valeur indiquée pour cette colonne.
Réf. du moteur(1)
(1) 1,0 kgf = 2,2 lbf ou 9,8 N. Un astérisque (*) indique une charge nominale mesurée à une valeur de tr/min inférieure à la valeur indiquée pour cette colonne.
Vitesse, max. tr/min
tr/min
500kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
6000kgf
6500kgf
7000kgf
7500kgf
8000kgf
VPL-A0631E 4500 – 29.2 – – 22.8 * 20.3 – – 17.7 – – – – – –
VPL-A0631M 7200 – – 25.5 – 21.5 – – – 18.3 * – – – – 15.1 * –
VPL-A0632F 4800 – 30.5 26.6 – – 22.2 * – – – 18.1 * – – – – –
VPL-A0633C 3000 39.5 31.4 28.4 * – – 21.8 – – – – – – – – –
VPL-A0633F 4500 39.5 – 27.4 – – 21.8 – – 19.0 – – – – – –
VPL-A0751E 4800 36.5 29.0 – – 22.6 * – – – – 17.2 * – – – – –
VPL-A0752C 3300 38.1 30.3 27.4 – – – 20.3 * – – – – – – – –
VPL-A0752E 4800 38.1 30.3 – – 23.1 * – – – – 17.9 * – – – – –
VPL-A0753C 3300 39.2 31.2 28.5 * – – – 20.9 * – – – – – – – –
VPL-A0753E 4600 39.2 31.2 – – 24.1 * – – – – 18.7 * – – – – –
VPL-B0631T 8000 – – 25.5 – – 20.3 – – – – 16.4 * – – – 14.6
VPL-B0631U 8000 – – 25.5 – – 20.3 – – – 17.1 – – – – 14.6
VPL-B0632F 4800 – 30.5 26.6 – – 22.2 * – – – 18.1 * – – – – –
VPL-B0632T 8000 – – – 24.2 – – – 19.2 – – – 16.5 * – – 15.3
VPL-B0633M 6900 – 31.4 – 24.9 – – – 19.9 * – – – – 16.5 * – –
VPL-B0633T 8000 – – 27.4 – – 21.8 – – – – 17.5 * – – – 15.7
VPL-B0751M 8000 – – 25.3 – – 20.1 – – – 17.2 * – – – – 14.5
VPL-B0752E 4800 38.1 30.3 – – 23.3 * – – – – 17.9 * – – – – –
VPL-B0752F 7000 – 30.3 – 24.0 – – 20.4 * – – – – – 15.8 – –
VPL-B0752M 8000 – – 26.4 – – 21.0 – – – 17.8 * – – – – 15.1
VPL-B0753E 4500 39.2 31.2 – 24.7 – – – – 18.9 – – – – – –
VPL-B0753F 6500 – 31.2 – 24.7 – – 21.4 * – – – – 16.7 – – –
VPL-B0753M 8000 – – 27.2 – – 21.6 – – – 18.7 * – – – – 15.6
Forces nominales de charge axiale (charge radiale nulle) pour les moteurs sans frein (suite)
Réf. du moteur(1)
Vitesse, max. tr/min
tr/min
500kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
6000kgf
6500kgf
7000kgf
7500kgf
8000kgf
Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016 13

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Forces nominales de charge axiale (charge radiale maximum) pour les moteurs avec frein
Réf. du moteur(1)
(1) 1,0 kgf = 2,2 lbf ou 9,8 N. Un astérisque (*) indique une charge nominale mesurée à une valeur de tr/min inférieure à la valeur indiquée pour cette colonne.
Vitesse, max. tr/min
tr/min
500kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
6000kgf
6500kgf
7000kgf
7500kgf
8000kgf
VPL-A0631E 4500 – 23.7 – – 17.2 * 14.7 – – 12.3 – – – – – –
VPL-A0631M 7200 – – 19.9 – 15.9 – – – 12.8 – – – – 10.0 * –
VPL-A0632F 4800 – 24.3 20.4 – – 16.1 * – – – 12.3 * – – – – –
VPL-A0633C 3000 33.5 24.8 21.8 * – – 15.4 – – – – – – – – –
VPL-A0633F 4500 33.5 – 20.8 – – 15.4 – – 12.9 – – – – – –
VPL-A0751E 4800 31.8 23.5 – – 17.1 * – – – – 11.9 * – – – – –
VPL-A0752C 3300 32.7 24.2 21.3 * – – 14.4 * – – – – – – – –
VPL-A0752E 4800 32.7 24.2 – – 17.0 * – – – – 12.3 * – – – – –
VPL-A0753C 3300 33.4 24.7 22.0 * – – 14.7 * – – – – – – – –
VPL-A0753E 4600 33.4 24.7 – – 17.7 * – – – – 12.7 * – – – – –
VPL-B0631T 8000 – – 19.9 – – 14.7 – – – – 11.1 * – – – 9.6
VPL-B0631U 8000 – – 19.9 – – 14.7 – – – 11.8 – – – – 9.6
VPL-B0632F 4800 – 24.3 20.4 – – 16.1 * – – – 12.3 * – – – – –
VPL-B0632T 8000 – – – 18.0 – – – 13.3 – – – 11.0 * – – 9.9
VPL-B0633M 6900 – 24.8 – 18.4 – – – 13.7 * – – – – 10.7 * – –
VPL-B0633T 8000 – – 20.8 – – 15.4 – – – – 11.6 * – – – 10.1
VPL-B0751M 8000 – – 19.7 – – 14.6 – – – 11.9 * – – – – 9.5
VPL-B0752E 4800 32.7 24.2 – – 17.2 * – – – – 12.3 * – – – – –
VPL-B0752F 7000 – 24.2 – 17.9 – – 14.5 * – – – – – 10.4 – –
VPL-B0752M 8000 – – 20.3 – – 15.0 – – – 12.1 * – – – – 9.8
VPL-B0753E 4500 33.4 24.7 – 18.3 – – – – 12.9 – – – – – –
VPL-B0753F 6500 – 24.7 – 18.3 – – 15.1 * – – – – 11.0 – – –
VPL-B0753M 8000 – – 20.7 – – 15.3 – – – 12.7 * – – – – 10.0
14 Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Forces nominales de charge axiale (charge radiale nulle) pour les moteurs avec frein
Réf. du moteur(1)
(1) 1,0 kgf = 2,2 lbf ou 9,8 N. Un astérisque (*) indique une charge nominale mesurée à une valeur de tr/min inférieure à la valeur indiquée pour cette colonne.
Vitesse, max. tr/min
tr/min
500kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
6000kgf
6500kgf
7000kgf
7500kgf
8000kgf
VPL-A0631E 4500 – 27.5 – – 19.9 * 17.1 – – 14.3 – – – – – –
VPL-A0631M 7200 – – 23.0 – 18.5 – – – 14.9 * – – – – 11.7 * –
VPL-A0632F 4800 – 27.5 23.0 – – 18.1 * – – – 13.9 * – – – – –
VPL-A0633C 3000 37.1 27.5 24.1 * – – 17.1 – – – – – – – – –
VPL-A0633F 4500 37.1 – 23.0 – – 17.1 – – 14.3 – – – – – –
VPL-A0751E 4800 37.1 27.5 – – 19.9 * – – – – 13.9 * – – – – –
VPL-A0752C 3300 37.1 27.5 24.1 * – – – 16.4 * – – – – – – – –
VPL-A0752E 4800 37.1 27.5 – – 19.3 * – – – – 13.9 * – – – – –
VPL-A0753C 3300 37.1 27.5 24.5 * – – – 16.4 * – – – – – – – –
VPL-A0753E 4600 37.1 27.5 – – 19.7 * – – – – 14.2 * – – – – –
VPL-B0631T 8000 – – 23.0 – – 17.1 – – – – 12.9 * – – – 11.1
VPL-B0631U 8000 – – 23.0 – – 17.1 – – – 13.7 – – – – 11.1
VPL-B0632F 4800 – 27.5 23.0 – – 18.1 * – – – 13.9 * – – – – –
VPL-B0632T 8000 – – – 20.3 – – – 15.1 – – – 12.4 * – – 11.1
VPL-B0633M 6900 – 27.5 – 20.3 – – – 15.2 * – – – – 11.9 * – –
VPL-B0633T 8000 – – 23.0 – – 17.1 – – – – 12.8 * – – – 11.1
VPL-B0751M 8000 – – 23.0 – – 17.1 – – – 13.9 * – – – – 11.1
VPL-B0752E 4800 37.1 27.5 – – 19.5 * – – – – 13.9 * – – – – –
VPL-B0752F 7000 – 27.5 – 20.3 – – 16.5 * – – – – – 11.8 – –
VPL-B0752M 8000 – – 23.0 – – 17.1 – – – 13.8 * – – – – 11.1
VPL-B0753E 4500 37.1 27.5 – 20.3 – – – – 14.3 – – – – – –
VPL-B0753F 6500 – 27.5 – 20.3 – – 16.8 * – – – – 12.2 – – –
VPL-B0753M 8000 – – 23.0 – – 17.1 – – – 14.2 * – – – – 11.1
Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016 15

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Moteurs Kinetix VP à faible inertie (brides 100 à 165 mm)
Forces nominales de charge radiale (maximum) pour les moteurs sans frein
Réf. du moteur(1)
(1) 1,0 kgf = 2,2 lbf ou 9,8 N. Un astérisque (*) indique une charge nominale mesurée à une valeur de tr/min inférieure à la valeur indiquée pour cette colonne.
Vitesse, max. tr/min
tr/min
500kgf
750kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
5500kgf
6000kgf
6500kgf
7000kgf
VPL-A1001C 2800 79.1 – 62.8 – 49.8 – 44.6 * – – – – – – – –
VPL-A1001M 6500 – – – 54.9 – 46.3 – – – 38.0 – – – 33.6 –
VPL-A1002C 3000 87.9 – 69.7 – 55.4 – 48.4 – – – – – – – –
VPL-A1002F 5000 – – 69.7 60.9 – – 48.4 – – – 40.8 – – – –
VPL-A1003C 2250 93.6 – 74.3 64.9 – 56.7 * – – – – – – – – –
VPL-A1003E 3750 93.6 – 74.3 – 59.0 – – – 47.8 * – – – – – –
VPL-A1003F 5500 – – – 64.9 – 54.8 – – 46.8 – – 42.1 – – –
VPL-A1152B 2150 98.8 – 78.4 68.5 – 60.8 * – – – – – – – – –
VPL-A1152E 3300 98.8 – 78.4 – 62.2 – – 52.7 * – – – – – – –
VPL-A1152F 5000 – – 78.4 – 62.2 – 54.4 – – – 45.9 – – – –
VPL-A1153C 2300 106.4 – 84.5 73.8 – 64.0 * – – – – – – – – –
VPL-A1303B 1950 132.9 – 105.5 92.2 84.4 * – – – – – – – – – –
VPL-A1303F 4000 – – 105.5 – 83.7 – 73.1 – 66.5 – – – – –
VPL-A1304A 1600 140.2 122.5 112.2 * – 95.2 * – – – – – – – – – –
VPL-A1304D 3000 140.2 – 111.3 – 88.3 – 77.2 – – – – – – – –
VPL-A1306C 2000 150.0 – 128.3 * 107.7 * 94.5 – – – – – – – – – –
VPL-B1001M 6000 – – – – 49.8 – 43.5 – 39.6 – – – 34.6 – –
VPL-B1002E 3300 87.9 – 69.7 – 55.4 – – 46.8 * – – – – – – –
VPL-B1002M 6000 – – – 60.9 – – 48.4 – – 42.2 – – 38.4 – –
VPL-B1003C 2500 93.6 – 74.3 64.9 – 54.8 – – – – – – – – –
VPL-B1003F 4750 – – 74.3 64.9 – – 51.5 – – – 44.2 * – – – –
VPL-B1003T 7000 – – – 64.9 – 54.8 – – – 45.0 – – – – 38.9
VPL-B1152C 2250 98.8 – 78.4 68.5 – 59.8 * – – – – – – – – –
VPL-B1152F 4500 – – 78.4 – 62.2 54.4 – – 47.5 – – – – –
VPL-B1152T 6500 – – – 68.5 – 57.8 – – 49.4 – – – – 42.0 –
VPL-B1153E 3200 106.4 – 84.5 – 67.0 – – 57.3 * – – – – – – –
VPL-B1153F 5000 – – 84.5 – 67.0 – 58.6 – – – 49.4 – – – –
VPL-B1303C 2250 132.9 – 105.5 92.2 – 80.5 * – – – – – – – – –
VPL-B1303F 4000 – – 105.5 – 83.7 – 74.0 * – 66.5 – – – – – –
VPL-B1304C 2150 140.2 – 111.3 99.5 * – 86.2 * – – – – – – – – –
VPL-B1304E 3500 – – 111.3 97.2 – 84.3 * – 73.3 – – – – – – –
VPL-B1306C 2500 150.0 – 119.1 – 100.8 * 87.7 – – – – – – – – –
VPL-B1306F 4250 – – 119.0 – 94.5 – 82.6 – – 73.5 * – – – – –
VPL-B1651C 2750 161.3 – 128.0 – 108.3 * – 91.4 * – – – – – – – –
VPL-B1651F 4750 – – 128.0 – 101.6 – 88.7 – – – 76.1 * – – – –
VPL-B1652C 2700 180.7 – 143.4 125.3 – – 103.0 * – – – – – – – –
VPL-B1652F 4000 – – 143.4 125.3 105.7 – – 90.4 – – – – – –
VPL-B1653C 2300 192.4 – 152.7 136.5 * – 115.7 * – – – – – – – – –
VPL-B1653D 3000 – – 152.7 139.9 * 125.5 * – 105.9 – – – – – – – –
VPL-B1654B 1850 200.1 174.8 – 152.5 * 129.4 * – – – – – – – – – –
VPL-B1654D 3000 – – 158.8 138.8 126.1 – 110.1 – – – – – – – –
16 Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Forces nominales de charge axiale (charge radiale maximum) pour les moteurs sans frein
Réf. du moteur(1)
(1) 1,0 kgf = 2,2 lbf ou 9,8 N. Un astérisque (*) indique une charge nominale mesurée à une valeur de tr/min inférieure à la valeur indiquée pour cette colonne.
Vitesse, max. tr/min
tr/min
500kgf
750kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
5500kgf
6000kgf
6500kgf
7000kgf
VPL-A1001C 2800 25.0 – 19.0 – 10.0 – 10.0 * – – – – – – – –
VPL-A1001M 6500 – – – 15.0 – 12.0 – – – 9.0 – – – 8.0 –
VPL-A1002C 3000 30.0 – 22.0 – 16.0 – 13.0 – – – – – – – –
VPL-A1002F 5000 – – 22.0 18.0 – – 13.0 – – – 11.0 – – – –
VPL-A1003C 2250 33.0 – 24.0 20.0 – 17.0 * – – – – – – – – –
VPL-A1003E 3750 33.0 – 24.0 – 18.0 – – – 13.0 * – – – – – –
VPL-A1003F 5500 – – – 20.0 – 16.0 – – 13.0 – – 11.0 – – –
VPL-A1152B 2150 44,0 – 32.0 27.0 – 23.0 * – – – – – – – – –
VPL-A1152E 3300 44.0 – 32.0 – 24.0 – – 15.0 * – – – – – – –
VPL-A1152F 5000 – – 32.0 – 24.0 – 20.0 – – – 16.0 – – – –
VPL-A1153C 2300 48.0 – 35.0 29.0 – 24.0 * – – – – – – – – –
VPL-A1303B 1950 39.0 – 29.0 24.0 22.0 * – – – – – – – – – –
VPL-A1303F 4000 – – 29.0 – 21.0 – 18.0 – 16.0 – – – – – –
VPL-A1304A 1600 43.0 36.0 32.0 * – 26.0 * – – – – – – – – – –
VPL-A1304D 3000 43.0 – 32.0 – 23.0 – 20.0 – – – – – – – –
VPL-A1306C 2000 48.0 – 39.0 * 31.0 * 26.0 – – – – – – – – – –
VPL-B1001M 6000 – – – – 14.0 – 11.0 – 10.0 – – – 8.0 – –
VPL-B1002E 3300 30.0 – 22.0 – 16.0 – – 13.0 * – – – – – – –
VPL-B1002M 6000 – – – 18.0 – – 13.0 – – 11.0 – – 10.0 – –
VPL-B1003C 2500 33.0 – 24.0 20.0 – 16.0 – – – – – – – – –
VPL-B1003F 4750 – – 24.0 20.0 – – 15.0 – – – 12.0 * – – – –
VPL-B1003T 7000 – – – 20.0 – 16.0 – – – 12.0 – – – – 10.0
VPL-B1152C 2250 44.0 – 32.0 27.0 – 22.0 * – – – – – – – – –
VPL-B1152F 4500 – – 32.0 – 24.0 – 20.0 – – 17.0 – – – – –
VPL-B1152T 6500 – – – 27.0 – 21.0 – – 17.0 – – – – 14.0 –
VPL-B1153E 3200 48.0 – 35.0 – 26.0 – – 21.0 * – – – – – – –
VPL-B1153F 5000 – – 35.0 – 26.0 – 22.0 – – – 17.0 – – – –
VPL-B1303C 2250 39.0 – 29.0 – 24.0 20.0 * – – – – – – – – –
VPL-B1303F 4000 – – 29.0 – 21.0 – 18.0 * – 16.0 – – – – – –
VPL-B1304C 2150 43.0 – 32.0 27.0 * – 23.0 * – – – – – – – – –
VPL-B1304E 3500 – – 32.0 27.0 – 22.0 * – 18.0 – – – – – – –
VPL-B1306C 2500 48.0 – 36.0 – 29.0 * 24.0 – – – – – – – – –
VPL-B1306F 4250 – – 36.0 – 26.0 – 22.0 – – 19.0 * – – – – –
VPL-B1651C 2750 48.0 – 35.0 – 28.0 * – 23.0 * – – – – – – – –
VPL-B1651F 4750 – – 35.0 – 26.0 – 22.0 – – – 18.0 * – – – –
VPL-B1652C 2700 58.0 – 43.0 36.0 – – 27.0 * – – – – – – – –
VPL-B1652F 4000 – – 43.1 36.1 – 28.9 – – 23.6 – – – – – –
VPL-B1653C 2300 64.0 – 47.0 41.0 * – 33.0 * – – – – – – – – –
VPL-B1653D 3000 – – 47.6 42.5 * 36.9 * – 29.5 – – – – – – – –
VPL-B1654B 1850 68.0 – 57.0 48.0 * 38.0 * – – – – – – – – – –
VPL-B1654D 3000 – – 50.7 42.5 37.5 – 31.5 – – – – – – – –
Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016 17

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Forces nominales de charge axiale (charge radiale nulle) pour les moteurs sans frein
Réf. du moteur(1)
(1) 1,0 kgf = 2,2 lbf ou 9,8 N. Un astérisque (*) indique une charge nominale mesurée à une valeur de tr/min inférieure à la valeur indiquée pour cette colonne.
Vitesse, max. tr/min
tr/min
500kgf
750kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
5500kgf
6000kgf
6500kgf
7000kgf
VPL-A1001C 2800 49.4 – 36.5 – 27.0 – 23.4 * – – – – – – – –
VPL-A1001M 6500 – – – 30.6 – 24.5 – – – 19.0 – – – 16.2 –
VPL-A1002C 3000 49.4 – 36.5 – 27.0 – 22.7 – – – – – – – –
VPL-A1002F 5000 – – 36.5 30.6 – – 22.7 – – – 18.2 – – – –
VPL-A1003C 2250 49.4 – 36.5 30.6 – 25.7 * – – – – – – – – –
VPL-A1003E 3750 49.4 – 36.5 – 27.0 – – – 20.6 * – – – – – –
VPL-A1003F 5500 – – – 30.6 – 24.5 – – 20.0 – – 17.4 – – –
VPL-A1152B 2150 68.3 – 50.5 42.4 – 36.0 * – – – – – – – – –
VPL-A1152E 3300 68.3 – 50.5 – 37.4 – – 30.1 * – – – – – – –
VPL-A1152F 5000 – – 50.5 – 37.4 – 31.4 – – – 25.1 – – – –
VPL-A1153C 2300 68.3 – 50.5 42.4 35.2 * – – – – – – – – –
VPL-A1303B 1950 68.3 – 50.5 42.4 37.8 * – – – – – – – – – –
VPL-A1303F 4000 – – 50.5 – 37.4 – 31.4 – 27.7 – – – – – –
VPL-A1304A 1600 68.3 57.2 51.1 * – 41.2 * – – – – – – – – – –
VPL-A1304D 3000 68.3 – 50.5 – 37.4 – 31.4 – – – – – – – –
VPL-A1306C 2000 68.3 – 55.7 * 44.3 * 37.4 – – – – – – – – – –
VPL-B1001M 6000 – – – – 27.0 – 22.7 – 20.0 – – – 16.8 – –
VPL-B1002E 3300 49.4 – 36.5 – 27.0 – – 21.8 * – – – – – –
VPL-B1002M 6000 – – – 30.6 – – 22.7 – – 19.0 – – 16.8 – –
VPL-B1003C 2500 49.4 – 36.5 30.6 – 24.5 – – – – – – – – –
VPL-B1003F 4750 – – 36.5 30.6 – – 22.7 – – – 18.6 * – – – –
VPL-B1003T 7000 – – – 30.6 – 24.5 – – – 19.0 – – – – 15.7
VPL-B1152C 2250 68.3 – 50.5 42.4 – 35.5 * – – – – – – – – –
VPL-B1152F 4500 – – 50.5 – 37.4 – 31.4 – – 26.3 – – – – –
VPL-B1152T 6500 – – – 42.4 – 33.9 – – 27.7 – – – – 22.4 –
VPL-B1153E 3200 68.3 – 50.5 – 37.4 – – 30.5 * – – – – – – –
VPL-B1153F 5000 – – 50.5 – 37.4 – 31.4 – – – 25.1 – – – –
VPL-B1303C 2250 68.3 – 50.5 42.3 – 35.5 * – – – – – – – – –
VPL-B1303F 4000 – – 50.5 – 37.4 – 31.8 * – 27.7 – – – – – –
VPL-B1304C 2150 68.3 – 50.5 43.6 * – 36.2 * – – – – – – – – –
VPL-B1304E 3500 – – 50.5 42.4 – 35.2 * – 29.3 – – – – – – –
VPL-B1306C 2500 68.3 – 50.5 – 40.6 * 33.9 – – – – – – – – –
VPL-B1306F 4250 – – 50.5 – 37.4 – 31.4 – – 27.0 * – – – – –
VPL-B1651C 2750 90.1 – 66.7 – 53.7 * – 43.0 * – – – – – – – –
VPL-B1651F 4750 – – 66.7 – 49.4 – 41.4 – – – 33.9 * – – – –
VPL-B1652C 2700 90.1 – 66.7 55.9 – – 43.3 * – – – – – – – –
VPL-B1652F 4000 – – 66.7 55.9 – 44.8 – – 36.5 – – – – – –
VPL-B1653C 2300 90.1 – 66.7 57.6 * – 46.4 * – – – – – – – – –
VPL-B1653D 3000 – – 66.7 59.5 * 51.7 * – 41.4 – – – – – – – –
VPL-B1654B 1850 90.1 75.6 – 63.2 * 51.1 * – – – – – – – – – –
VPL-B1654D 3000 – – 66.7 55.9 49.4 – 41.4 – – – – – – – –
18 Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016
Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
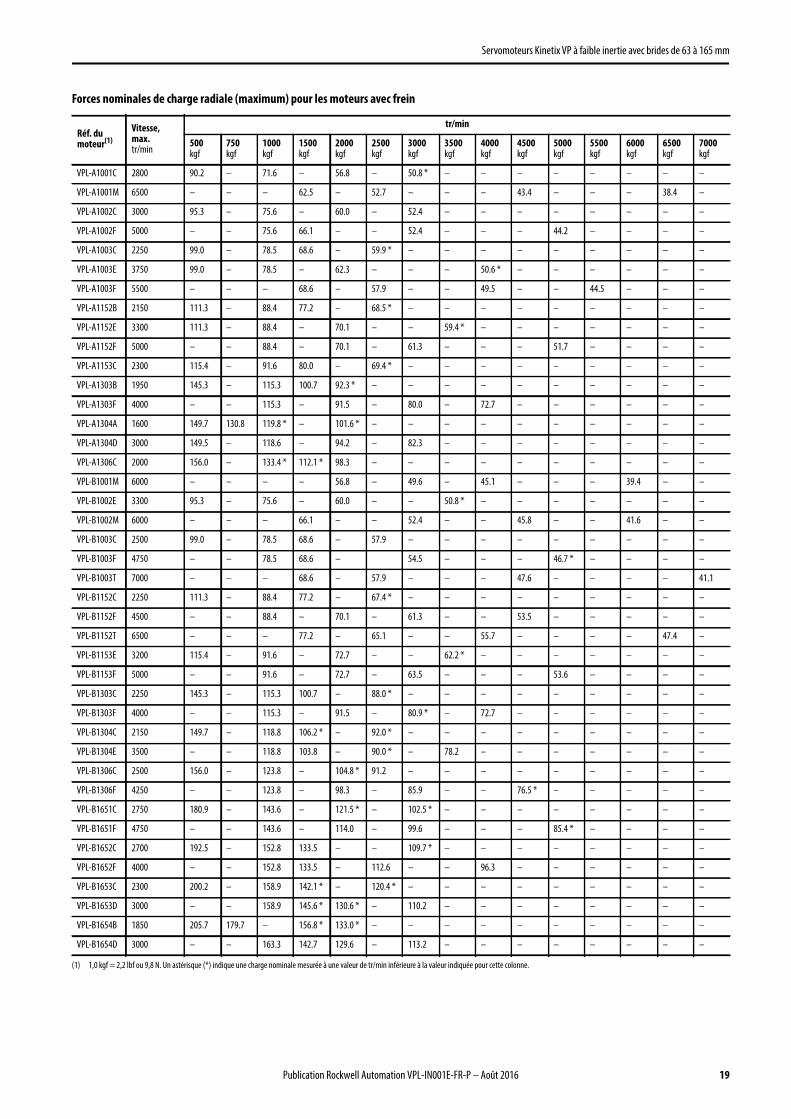
Forces nominales de charge radiale (maximum) pour les moteurs avec frein
Réf. du moteur(1)
(1) 1,0 kgf = 2,2 lbf ou 9,8 N. Un astérisque (*) indique une charge nominale mesurée à une valeur de tr/min inférieure à la valeur indiquée pour cette colonne.
Vitesse, max. tr/min
tr/min
500kgf
750kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
5500kgf
6000kgf
6500kgf
7000kgf
VPL-A1001C 2800 90.2 – 71.6 – 56.8 – 50.8 * – – – – – – – –
VPL-A1001M 6500 – – – 62.5 – 52.7 – – – 43.4 – – – 38.4 –
VPL-A1002C 3000 95.3 – 75.6 – 60.0 – 52.4 – – – – – – – –
VPL-A1002F 5000 – – 75.6 66.1 – – 52.4 – – – 44.2 – – – –
VPL-A1003C 2250 99.0 – 78.5 68.6 – 59.9 * – – – – – – – – –
VPL-A1003E 3750 99.0 – 78.5 – 62.3 – – – 50.6 * – – – – – –
VPL-A1003F 5500 – – – 68.6 – 57.9 – – 49.5 – – 44.5 – – –
VPL-A1152B 2150 111.3 – 88.4 77.2 – 68.5 * – – – – – – – – –
VPL-A1152E 3300 111.3 – 88.4 – 70.1 – – 59.4 * – – – – – – –
VPL-A1152F 5000 – – 88.4 – 70.1 – 61.3 – – – 51.7 – – – –
VPL-A1153C 2300 115.4 – 91.6 80.0 – 69.4 * – – – – – – – – –
VPL-A1303B 1950 145.3 – 115.3 100.7 92.3 * – – – – – – – – – –
VPL-A1303F 4000 – – 115.3 – 91.5 – 80.0 – 72.7 – – – – – –
VPL-A1304A 1600 149.7 130.8 119.8 * – 101.6 * – – – – – – – – – –
VPL-A1304D 3000 149.5 – 118.6 – 94.2 – 82.3 – – – – – – – –
VPL-A1306C 2000 156.0 – 133.4 * 112.1 * 98.3 – – – – – – – – – –
VPL-B1001M 6000 – – – – 56.8 – 49.6 – 45.1 – – – 39.4 – –
VPL-B1002E 3300 95.3 – 75.6 – 60.0 – – 50.8 * – – – – – – –
VPL-B1002M 6000 – – – 66.1 – – 52.4 – – 45.8 – – 41.6 – –
VPL-B1003C 2500 99.0 – 78.5 68.6 – 57.9 – – – – – – – – –
VPL-B1003F 4750 – – 78.5 68.6 – 54.5 – – – 46.7 * – – – –
VPL-B1003T 7000 – – – 68.6 – 57.9 – – – 47.6 – – – – 41.1
VPL-B1152C 2250 111.3 – 88.4 77.2 – 67.4 * – – – – – – – – –
VPL-B1152F 4500 – – 88.4 – 70.1 – 61.3 – – 53.5 – – – – –
VPL-B1152T 6500 – – – 77.2 – 65.1 – – 55.7 – – – – 47.4 –
VPL-B1153E 3200 115.4 – 91.6 – 72.7 – – 62.2 * – – – – – – –
VPL-B1153F 5000 – – 91.6 – 72.7 – 63.5 – – – 53.6 – – – –
VPL-B1303C 2250 145.3 – 115.3 100.7 – 88.0 * – – – – – – – – –
VPL-B1303F 4000 – – 115.3 – 91.5 – 80.9 * – 72.7 – – – – – –
VPL-B1304C 2150 149.7 – 118.8 106.2 * – 92.0 * – – – – – – – – –
VPL-B1304E 3500 – – 118.8 103.8 – 90.0 * – 78.2 – – – – – – –
VPL-B1306C 2500 156.0 – 123.8 – 104.8 * 91.2 – – – – – – – – –
VPL-B1306F 4250 – – 123.8 – 98.3 – 85.9 – – 76.5 * – – – – –
VPL-B1651C 2750 180.9 – 143.6 – 121.5 * – 102.5 * – – – – – – – –
VPL-B1651F 4750 – – 143.6 – 114.0 – 99.6 – – – 85.4 * – – – –
VPL-B1652C 2700 192.5 – 152.8 133.5 – – 109.7 * – – – – – – – –
VPL-B1652F 4000 – – 152.8 133.5 – 112.6 – – 96.3 – – – – – –
VPL-B1653C 2300 200.2 – 158.9 142.1 * – 120.4 * – – – – – – – – –
VPL-B1653D 3000 – – 158.9 145.6 * 130.6 * – 110.2 – – – – – – – –
VPL-B1654B 1850 205.7 179.7 – 156.8 * 133.0 * – – – – – – – – – –
VPL-B1654D 3000 – – 163.3 142.7 129.6 – 113.2 – – – – – – – –
Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016 19

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Forces nominales de charge axiale (charge radiale maximum) pour les moteurs avec frein
Réf. du moteur(1)
(1) 1,0 kgf = 2,2 lbf ou 9,8 N. Un astérisque (*) indique une charge nominale mesurée à une valeur de tr/min inférieure à la valeur indiquée pour cette colonne.
Vitesse, max. tr/min
tr/min
500kgf
750kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
5500kgf
6000kgf
6500kgf
7000kgf
VPL-A1001C 2800 31.0 – 23.0 – 17.0 – 14.0 * – – – – – – – –
VPL-A1001M 6500 – – – 19.0 – 15.0 – – – 12.0 – – – 10.0 –
VPL-A1002C 3000 34.0 – 25.0 – 18.0 – 15.0 – – – – – – – –
VPL-A1002F 5000 – – 25.0 21.0 – – 15.0 – – – 12.0 – – – –
VPL-A1003C 2250 36.0 – 26.0 22.0 – 18.0 * – – – – – – – – –
VPL-A1003E 3750 36.0 – 26.0 – 19.0 – – – 15.0 * – – – – – –
VPL-A1003F 5500 – – – 22.0 – 18.0 – – 14.0 – – 12.0 – – –
VPL-A1152B 2150 50.0 – 37.0 31.0 – 26.0 * – – – – – – – – –
VPL-A1152E 3300 51.0 – 37.0 – 27.0 – – 22.0 * – – – – – – –
VPL-A1152F 5000 – – 37.0 – 27.0 – 23.0 – – – 18.0 – – – –
VPL-A1153C 2300 53.0 – 39.0 32.0 – 27.0 * – – – – – – – – –
VPL-A1303B 1950 46.0 – 34.0 28.0 25.0 * – – – – – – – – – –
VPL-A1303F 4000 – – 34.0 – 25.0 – 21.0 – 18.0 – – – – – –
VPL-A1304A 1600 48.0 40.0 36.0 * – 29.0 * – – – – – – – – – –
VPL-A1304D 3000 48.0 – 36.0 – 26.0 – 22.0 – – – – – – – –
VPL-A1306C 2000 52.0 – 42.0 * 33.3 * 28.0 – – – – – – – – – –
VPL-B1001M 6000 – – – – 17.0 – 14.0 – 12.0 – – – 10.0 – –
VPL-B1002E 3300 34.0 – 25.0 – 18.0 – – 15.0 * – – – – – – –
VPL-B1002M 6000 – – – 21.0 – – 15.0 – – 13.0 – – 11.0 – –
VPL-B1003C 2500 36.0 – 26.0 22.0 – 18.0 – – – – – – – – –
VPL-B1003F 4750 – – 26.0 22.0 – – 16.0 – – – 13.0 * – – – –
VPL-B1003T 7000 – – – 22.0 – 18.0 – – – 13.0 – – – – 11.0
VPL-B1152C 2250 51.0 – 37.0 31.0 – 26.0 * – – – – – – – – –
VPL-B1152F 4500 – – 37.0 – 27.0 – 23.0 – – 19.0 – – – – –
VPL-B1152T 6500 – – – 31.0 – 25.0 – – 20.0 – – – – 16.0 –
VPL-B1153E 3200 53.0 – 39.0 – 29.0 – – 23.0* – – – – – – –
VPL-B1153F 5000 – – 39.0 – 29.0 – 24.0 – – – 19.0 – – – –
VPL-B1303C 2250 46.0 – 34.0 28.0 – 24.0 * – – – – – – – – –
VPL-B1303F 4000 – – 34.0 – 25.0 – 21.0 * – 18.0 – – – – – –
VPL-B1304C 2150 48.0 – 36.0 31.0 * – 25.0 * – – – – – – – – –
VPL-B1304E 3500 – – 36.0 30.0 – 25.0 * – 20.0 – – – – – – –
VPL-B1306C 2500 52.0 – 38.0 – 31.0 * 25.0 – – – – – – – – –
VPL-B1306F 4250 – – 38.0 – 28.0 – 24.0 – – 20.0 * – – – – –
VPL-B1651C 2750 58.0 – 43.0 – 34.0 * – 27.0 * – – – – – – – –
VPL-B1651F 4750 – – 43.0 – 31.0 – 26.0 – – – 21.0 * – – – –
VPL-B1652C 2700 64.0 – 47.0 39.0 – – 30.0 * – – – – – – – –
VPL-B1652F 4000 – – 47.6 40.0 – 32.0 – – 26.1 – – – – – –
VPL-B1653C 2300 68.0 – 50.0 43.0 * – 35.0 * – – – – – – – – –
VPL-B1653D 3000 – – 50.7 45.3 * 39.3 * – 31.5 – – – – – – – –
VPL-B1654B 1850 71.0 59.0 – 50.0 * 40.0 * – – – – – – – – – –
VPL-B1654D 3000 – – 52.9 44.4 39.2 – 32.9 – – – – – – – –
20 Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Forces nominales de charge axiale (charge radiale nulle) pour les moteurs avec frein
Réf. du moteur(1)
(1) 1,0 kgf = 2,2 lbf ou 9,8 N. Un astérisque (*) indique une charge nominale mesurée à une valeur de tr/min inférieure à la valeur indiquée pour cette colonne.
Vitesse, max. tr/min
tr/min
500kgf
750kgf
1000kgf
1500kgf
2000kgf
2500kgf
3000kgf
3500kgf
4000kgf
4500kgf
5000kgf
5500kgf
6000kgf
6500kgf
7000kgf
VPL-A1001C 2800 49.4 – 36.5 – 27.0 – 23.4 * – – – – – – – –
VPL-A1001M 6500 – – – 30.6 – 24.5 – – – 19.0 – – – 16.2 –
VPL-A1002C 3000 49.4 – 36.5 – 27.0 – 22.7 – – – – – – – –
VPL-A1002F 5000 – – 36.5 30.6 – – 22.7 – – – 18.2 – – – –
VPL-A1003C 2250 49.4 – 36.5 30.6 – 25.7 * – – – – – – – – –
VPL-A1003E 3750 49.4 – 36.5 – 27.0 – – – 20.6 * – – – – – –
VPL-A1003F 5500 – – 30.6 – 24.5 – – 20.0 – – 17.4 – – –
VPL-A1152B 2150 68.3 – 50.5 42.4 – 36.2 * – – – – – – – – –
VPL-A1152E 3300 68.3 – 50.5 – 37.4 – – 30.1 * – – – – – – –
VPL-A1152F 5000 – – 50.5 – 37.4 – 31.4 – – – 25.1 – – – –
VPL-A1153C 2300 68.3 – 50.5 42.4 – 35.2 * – – – – – – – – –
VPL-A1303B 1950 68.3 – 50.5 42.4 37.8 * – – – – – – – – – –
VPL-A1303F 4000 – – 50.5 – 37.4 – 31.4 – 27.7 – – – – – –
VPL-A1304A 1600 68.3 57.2 51.1 * – 41.2 * – – – – – – – – – –
VPL-A1304D 3000 68.3 – 50.5 – 37.4 – 31.4 – – – – – – – –
VPL-A1306C 2000 68.3 – 55.7 * 44.3 37.4 – – – – – – – – – –
VPL-B1001M 6000 – – – – 27.0 – 22.7 – 20.0 – – – 16.8 – –
VPL-B1002E 3300 49.4 – 36.5 – 27.0 – – 21.8 * – – – – – – –
VPL-B1002M 6000 – – – 30.6 – – 22.7 – – 19.0 – – 16.8 – –
VPL-B1003C 2500 49.4 – 36.5 30.6 – 24.5 – – – – – – – – –
VPL-B1003F 4750 – – 36.5 30.6 – – 22.7 – – – 18.6 * – – – –
VPL-B1003T 7000 – – – 30.6 – 24.5 – – – 19.0 – – – – 15.7
VPL-B1152C 2250 68.3 – 50.5 42.4 – 35.5 * – – – – – – – –
VPL-B1152F 4500 – – 50.5 – 37.4 – 31.4 – – 26.3 – – – – –
VPL-B1152T 6500 – – – 42.4 – 33.9 – – 27.7 – – – – 22.4 –
VPL-B1153E 3200 68.3 – 50.5 – 37.4 – – 30.5 * – – – – – – –
VPL-B1153F 5000 – – 50.5 – 37.4 – 31.4 – – – 25.1 – – – –
VPL-B1303C 2250 68.3 – 50.5 42.4 – 35.5 * – – – – – – – – –
VPL-B1303F 4000 – – 50.5 – 37.4 – 31.8 * – 27.7 – – – – – –
VPL-B1304C 2150 68.3 – 50.5 43.6 * – 36.2 * – – – – – – – – –
VPL-B1304E 3500 – – 50.5 42.4 – 35.2 * – 29.3 – – – – – – –
VPL-B1306C 2500 68.3 – 50.5 – 40.6 * 33.9 – – – – – – – – –
VPL-B1306F 4250 – – 50.5 – 37.4 – 31.4 – – 27.0 * – – – – –
VPL-B1651C 2750 90.1 – 66.7 – 53.7 – 43.0 * – – – – – – – –
VPL-B1651F 4750 – – 66.7 – 49.4 – 41.4 – – – 33.9 * – – – –
VPL-B1652C 2700 90.1 – 66.7 55.9 – – 43.3 * – – – – – – – –
VPL-B1652F 4000 – – 66.7 55.9 – 44.8 – – 36.5 – – – – – –
VPL-B1653C 2300 90.1 – 66.7 57.6 * – 46.4 * – – – – – – – – –
VPL-B1653D 3000 – – 66.7 59.5 * 51.7 * – 41.4 – – – – – – – –
VPL-B1654B 1850 90.1 75.6 – 63.2 * 51.1 * – – – – – – – – – –
VPL-B1654D 3000 – – 66.7 55.9 49.4 – 41.4 – – – – – – – –
Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016 21

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Conditions ambiantes
Accessoires moteurLes accessoires suivants sont disponibles pour les servomoteurs Kinetix à faible inertie.
Câbles moteur uniques série 2090 Des câbles moteur uniques fabriqués en usine sont nécessaires avec les moteurs -Kinetix VP à faible inertie. Ces câbles sont conçus pour isoler les signaux d’alimentation et de retour ou de frein au sein du câble. Les câbles moteur uniques sont disponibles en longueurs standard configurables et assurent une terminaison de blindage et d’étanchéité.
Contactez votre agence commerciale Rockwell Automation la plus proche ou consultez la publication GMC-TD004, « Kinetix Motion Accessories Technical Data », pour de plus amples informations sur les câbles moteur uniques série 2090 disponibles.
Kits de joint d’arbreDes kits de joint d’arbre sont disponibles en tant que kits de rechange pour l’installation sur site. Un joint d’arbre fournit une barrière qui empêche l’humidité et les particules de pénétrer dans les paliers du moteur. Les joints d’arbre sont réalisés en nitrile et les kits incluent un lubrifiant pour réduire l’usure.
Références de kit de joint d’arbre
Reportez-vous à la publication 2090-IN012, « Shaft-seal Kit Installation Instructions », pour des instructions sur l’installation d’un joint d’arbre.
Attribut Valeur
Température en fonctionnement 0 à 40 °C (32 à 104 °F)(3)
(3) Pour obtenir ces caractéristiques thermiques nominales, installez le moteur sur une surface avec une dissipation de chaleur équivalente à celle obtenue avec
un dissipateur thermique en aluminium de la taille indiquée ci-dessous :
Bride de 63 mm, 203,2 x 203,2 x 6,35 mm (8 x 8 x 0,25 in.) ;
Bride de 75 mm, 254,0 x 254,0 x 6,35 mm (10 x 10 x 0,25 in.) ;
Bride de 100 à 165 mm, 304,8 x 304,8 x 12,7 mm (12 x 12 x 0,5 in.).
Température, stockage –30 à 40 °C (–22 à 104 °F)
Humidité relative, stockage 5 à 90 % sans condensation
Atmosphère, stockage Non corrosive
Indice de protection IP(1) du moteur avec joint d’arbre en option(2) et utilisation de connecteurs de câble étanches
(1) Le code de protection international (IP66) équivaut approximativement à la norme NEMA 35 (étanche à la poussière et aux égouttures).
(2) Un kit de joints d’arbre en option est nécessaire afin d’obtenir l’indice de protection IP spécifiée pour le moteur. Un indice de protection au niveau du système
dépend aussi de l’indice IP du câble. Reportez-vous à la section Documentations connexes, page 23, pour les instructions d’installation de joint d’arbre.
IP66 – étanche à la poussière et aux projections de liquide(4)
(4) Les descriptions des indices de protection IP sont fournies à titre indicatif uniquement. Référez-vous aux normes internationales pour une description plus
complète des caractéristiques nominales.
Indice de protection IP du moteur sans joint d’arbre et orientation de montage suivante :
Arbre vers le bas IP53 – étanche à la poussière et aux jets d’eau puissants(4)
Arbre horizontal IP51 – étanche à la poussière et à l’eau s’écoulant verticalement(4)
Arbre vers le haut IP50 – étanche à la poussière, aucune protection contre l’eau(4)
IMPORTANTLes joints d’arbre sont sujets à l’usure, d’où la nécessité de les inspecter et de les remplacer à intervalles réguliers. Un remplacement tous les 3 mois et
n’excédant pas 12 mois est recommandé, selon les conditions d’utilisation.
Réf. du moteur Réf. kit de joint d’arbre
VPL-A063xx et VPL-B063xxVPL-SSN-F063075
VPL-A075xx et VPL-B075xx
VPL-A100xx et VPL-B100xx MPL-SSN-A3B3
VPL-A115xx et VPL-B115xx MPL-SSN-A4B4
VPL-A130xx et VPL-B130xx MPL-SSN-A5B5
VPL-B165xx MPL-SSN-F165
22 Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016

Servomoteurs Kinetix VP à faible inertie avec brides de 63 à 165 mm
Documentations connexes Les documents suivants contiennent des informations sur des produits connexes de Rockwell Automation.
Vous pouvez consulter ou télécharger les publications sur le site Internet http://www.rockwellautomation.com/global/literature-library/overview.page. Pour commander des exemplaires imprimés de documentation technique, contactez votre distributeur Allen-Bradley ou le représentant commercial Rockwell Automation.
Documentation Description
Kinetix Rotary Motion Specifications Technical Data, publication GMC-TD001 Informations techniques sur les moteurs rotatifs Allen-Bradley®, avec les caractéristiques de performances, environnementales, d’homologation, de force de charge, ou encore les schémas d’encombrement.
Kinetix Motion Accessories Specifications, publication GMC-TD004 Informations techniques et dimensions concernant les accessoires de servovariateur Allen-Bradley.
Kinetix 5500 Servo Drives User Manual, publication 2198-UM001 Informations sur l’installation, la configuration, la mise en route et le dépannage d’un système de servovariateur.Kinetix 5700 Servo Drives User Manual, publication 2198-UM002
Kinetix 5500 Drive System Design Guide, publication GMC-RM009 Informations sur les composants de système de variateur et les accessoires nécessaires pour votre combinaison de moteur/variateur Kinetix.Kinetix 5700 Drive Systems Design Guide, publication GMC-RM010
Shaft-seal Kit Installation Instructions, publication 2090-IN012 Informations sur l’installation d’un joint d’arbre sur ce modèle et d’autres servomoteurs.
Site Internet d’homologation des produits,http://www.rockwellautomation.com/global/certification/overview.page
Déclarations de conformité, certificats et autres informations d’homologation des produits.
Allen-Bradley Industrial Automation Glossary, publication AG-7.1 Un glossaire des termes et abréviations du domaine de l’automatisation industrielle.
System Design for Control of Electrical Noise Reference Manual, publication GMC-RM001 Informations, exemples et techniques conçus pour minimiser les défaillances système provoquées par les parasites électriques.
Publication Rockwell Automation VPL-IN001E-FR-P – Août 2016 23
Assistance Rockwell AutomationUtilisez les ressources suivantes pour accéder aux informations d’assistance.
CommentairesVos commentaires nous aident à mieux vous servir. Pour toute suggestion utile concernant l’amélioration de ce document, veuillez compléter le formulaire « How Are We Doing? », disponible à l’adresse http://literature.rockwellautomation.com/idc/groups/literature/documents/du/ra-du002_-en-e.pdf.
Centre d’assistance techniqueArticles de la Base de connaissances, vidéos didactiques, foires aux questions, chat, forums d’utilisateurs et notifications de mises à jour de produit.
https://rockwellautomation.custhelp.com/
Numéros de téléphone de l’assistance technique locale Localisez le numéro de téléphone pour votre pays. http://www.rockwellautomation.com/global/support/get-support-now.page
Codes de numérotation directeTrouvez le code de numérotation directe pour votre produit. Utilisez le code pour le transfert direct de votre appel à un ingénieur de l’assistance technique.
http://www.rockwellautomation.com/global/support/direct-dial.page
Bibliothèque documentaire Notices d’installation, manuels, brochures et fiches techniques. http://www.rockwellautomation.com/global/literature-library/overview.page
Centre de compatibilité et de téléchargement des produits (PCDC)
Obtenez une aide sur les niveaux d’interaction des produits, vérifiez les fonctionnalités et possibilités, et trouvez le firmware associé.
http://www.rockwellautomation.com/global/support/pcdc.page
Siège des activités « Power, Control and Information Solutions »Amériques : Rockwell Automation, 1201 South Second Street, Milwaukee, WI 53204-2496 Etats-Unis, Tél: +1 414.382.2000, Fax : +1 414.382.4444Europe / Moyen-Orient / Afrique : Rockwell Automation NV, Pegasus Park, De Kleetlaan 12a, 1831 Diegem, Belgique, Tél: +32 2 663 0600, Fax : +32 2 663 0640Asie Pacifique : Rockwell Automation, Level 14, Core F, Cyberport 3, 100 Cyberport Road, Hong Kong, Tél: +852 2887 4788, Fax : +852 2508 1846
Canada : Rockwell Automation, 3043 rue Joseph A. Bombardier, Laval, Québec, H7P 6C5, Tél: +1 (450) 781-5100, Fax: +1 (450) 781-5101, www.rockwellautomation.caFrance : Rockwell Automation SAS – 2, rue René Caudron, Bât. A, F-78960 Voisins-le-Bretonneux, Tél: +33 1 61 08 77 00, Fax : +33 1 30 44 03 09Suisse : Rockwell Automation AG, Av. des Baumettes 3, 1020 Renens, Tél: 021 631 32 32, Fax: 021 631 32 31, Customer Service Tél: 0848 000 278
www.rockwel lautomation.com
Allen-Bradley, Kinetix, Rockwell Automation et Rockwell Software sont des marques commerciales de Rockwell Automation, Inc.
Les marques commerciales n’appartenant pas à Rockwell Automation sont la propriété de leurs sociétés respectives.
Rockwell Automation tient à jour les informations environnementales relatives à ses produits sur son site Internet : http://www.rockwellautomation.com/rockwellautomation/about-us/sustainability-ethics/product-environmental-
compliance.page.
Publication VPL-IN001E-FR-P – Août 2016 Copyright © 2016 Rockwell Automation, Inc. Tous droits réservés. Imprimé aux États-Unis.




















