Embed Size (px)
Citation preview
1 © 2014 The MathWorks, Inc.
Vom Konzept zum Modell physikalischer Systeme
Smarter Modellieren mit Simscape™
Maximilian Apfelbeck
MathWorks
München, 9.07.2014
M
+ - 12V Up
Up Down
Down
V+ V- P T T
A B
2
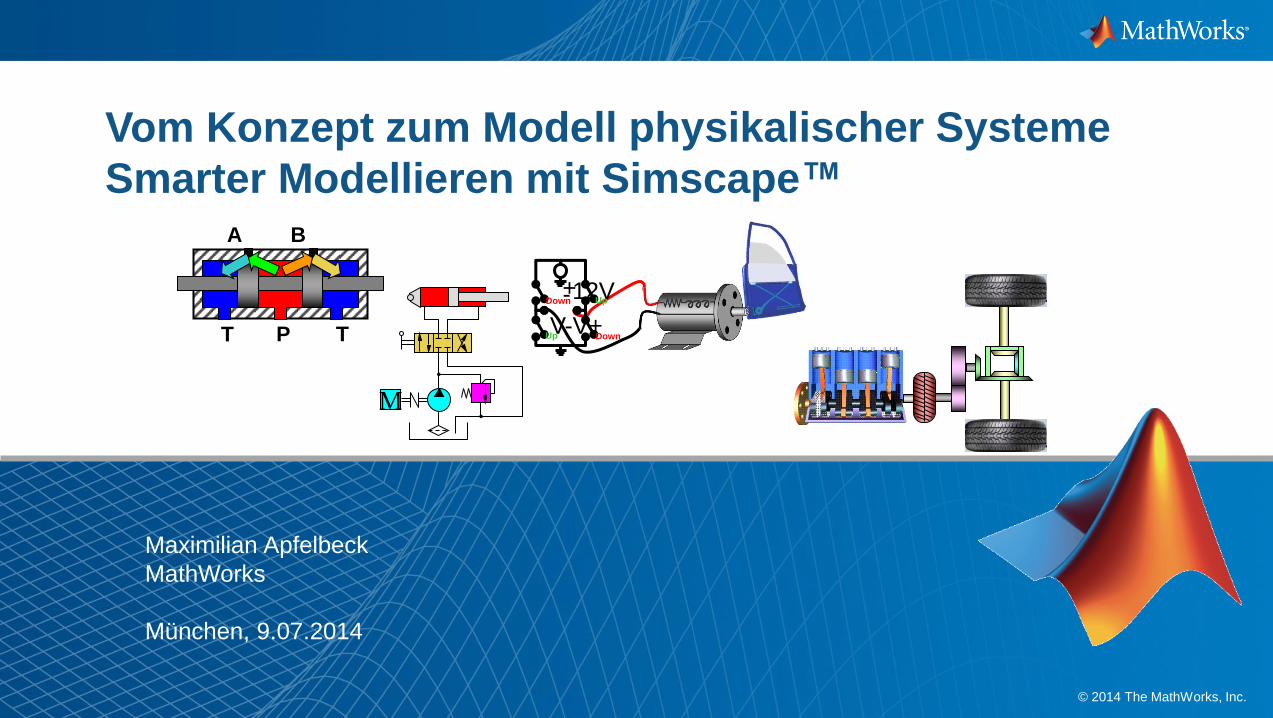
Key Take-Aways
Create accurate, reusable
plant models quickly and easily
Intuitive and easy to read multi-domain
modeling approach
Optimize system performance
– Develop in a single environment
V+
V-
u y s1 s2
s3
System
Actu
ato
rs
Sen
so
rs
3
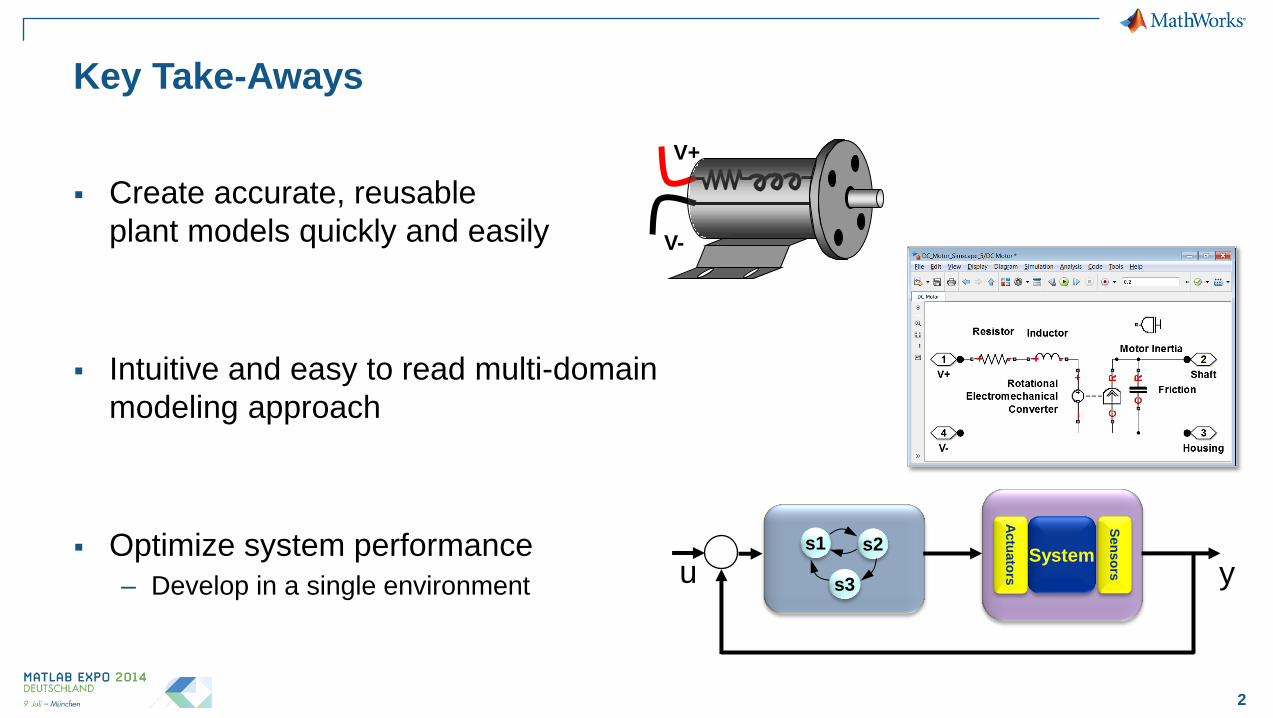
Model-Based Design Development Process
System-Level
Specification
Subsystem
Design
Subsystem
Integration & Test
System-Level
Integration & Test
Complete
Integration
& Test
Code Verification and
Validation
Integration testing
User Acceptance
Testing Requirements
Subsystem
Implementation
DSP FPGA ASIC
Embedded Software
Digital Electronics
C, C++ VHDL, Verilog
Implementation
Integration
MCU
Data Modeling
Algorithm
Development
Data Analysis
Research
System Design
Physical Components
Environment
Algorithms
Component Design
Design
with
Simulation
Executable
Specifications
Continuous
Test and
Verification
Automatic
Code Generation
Models
4
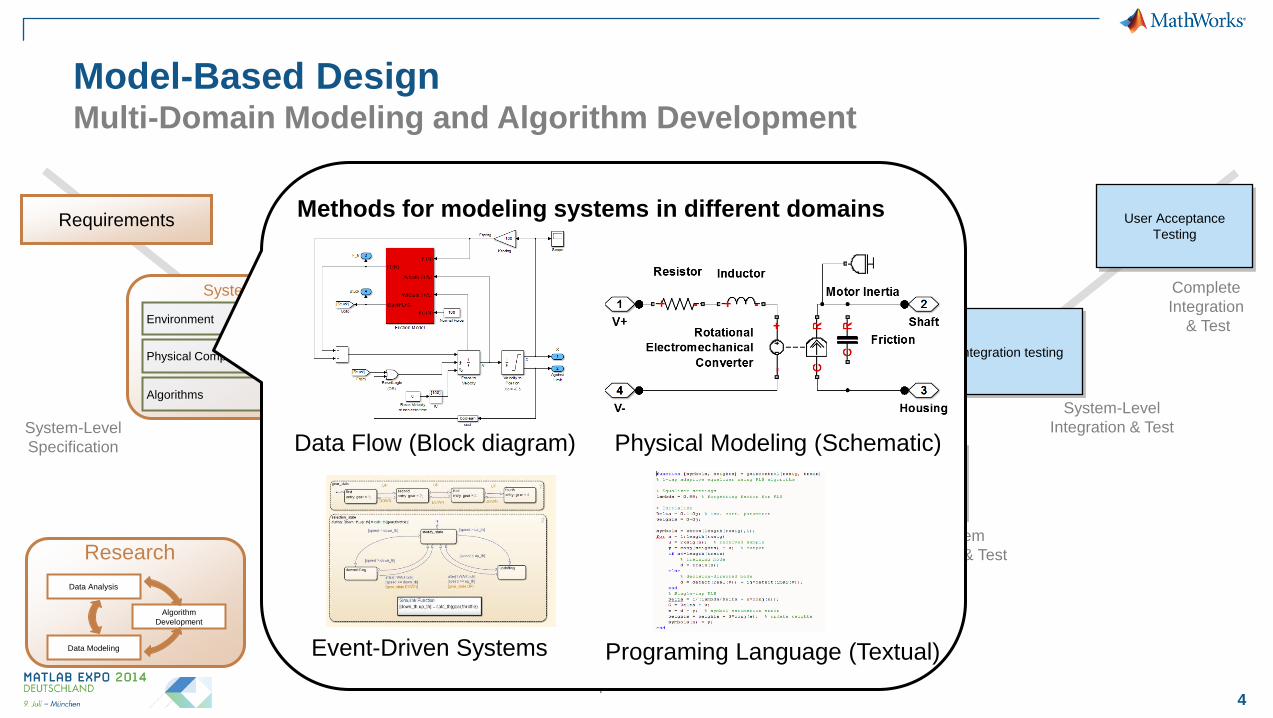
Model-Based Design Multi-Domain Modeling and Algorithm Development
System-Level
Specification
Subsystem
Design
Subsystem
Implementation
Subsystem
Integration & Test
System-Level
Integration & Test
Complete
Integration
& Test
Code Verification and
Validation
Integration testing
User Acceptance
Testing
DSP FPGA ASIC
Embedded Software
Digital Electronics
C, C++ VHDL, Verilog
Implementation
Integration
MCU
Requirements
System Design
Physical Components
Environment
Algorithms
Component Design
Data Modeling
Algorithm
Development
Data Analysis
Research
Methods for modeling systems in different domains
Physical Modeling (Schematic) Data Flow (Block diagram)
Event-Driven Systems Programing Language (Textual)
5
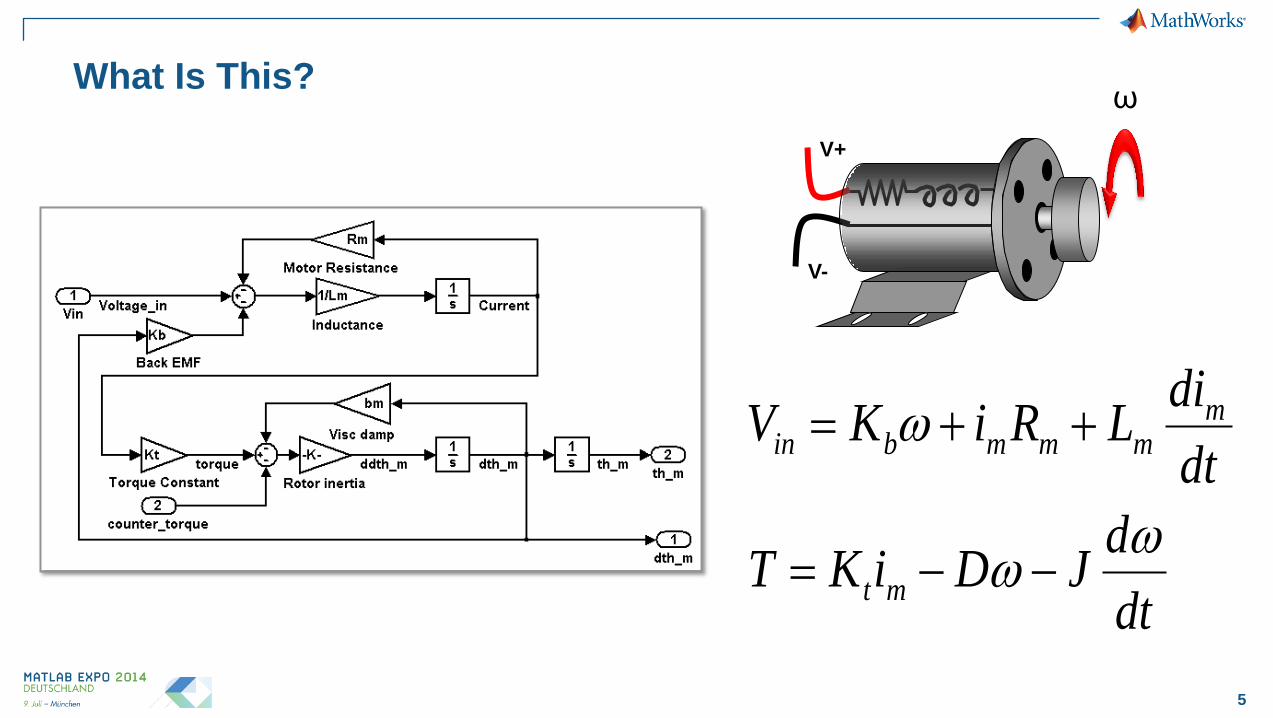
What Is This?
V+
V-
ω
dt
diLRiKV m
mmmbin
dt
dJDiKT mt
6
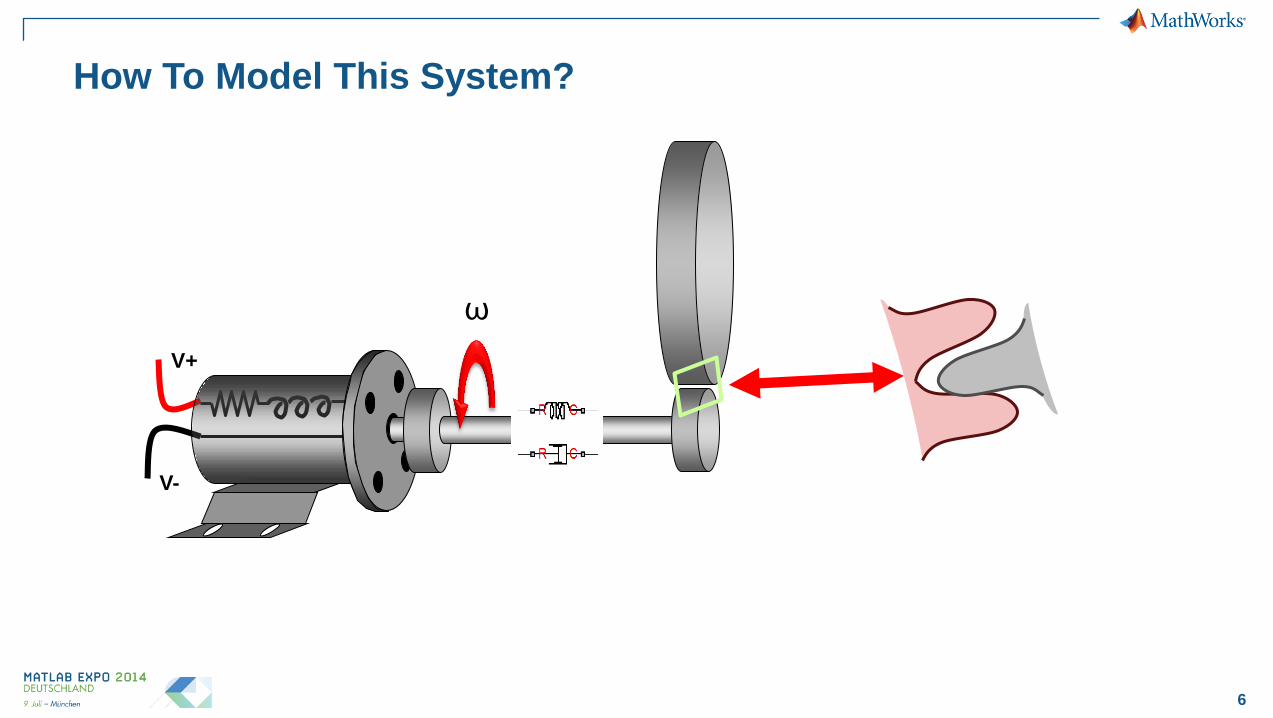
How To Model This System?
V+
V-
ω
7
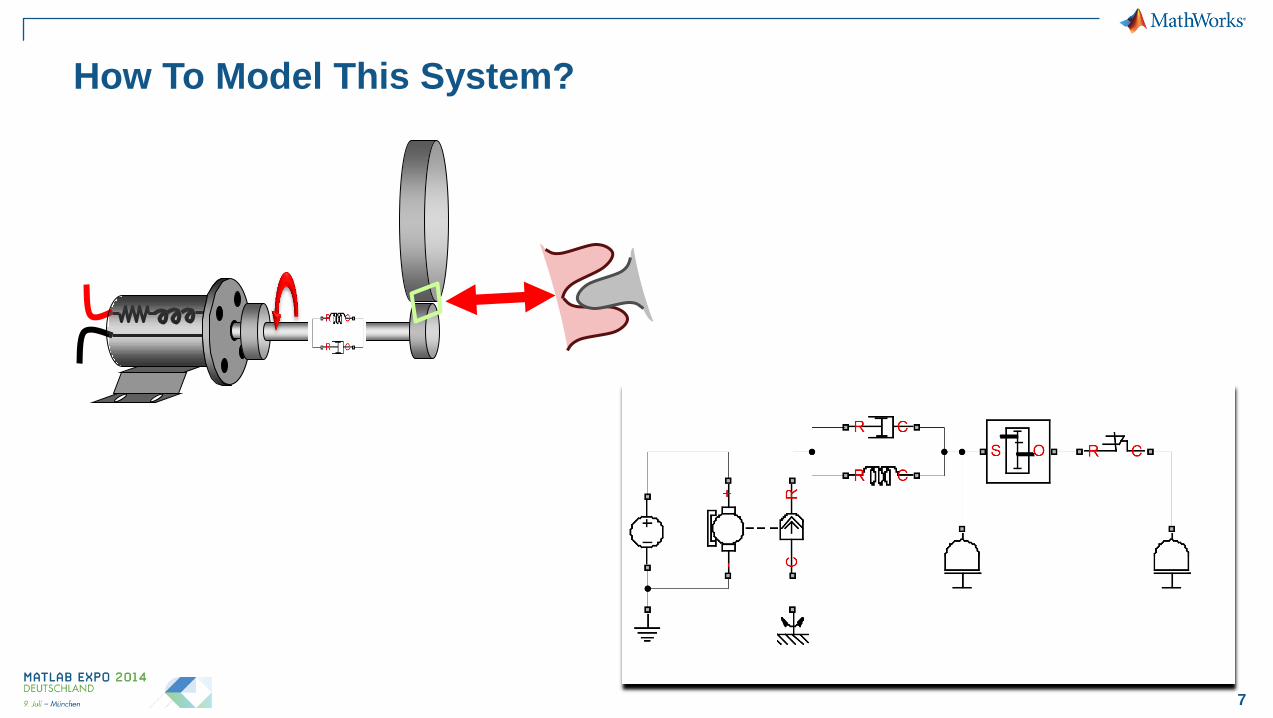
How To Model This System?
8
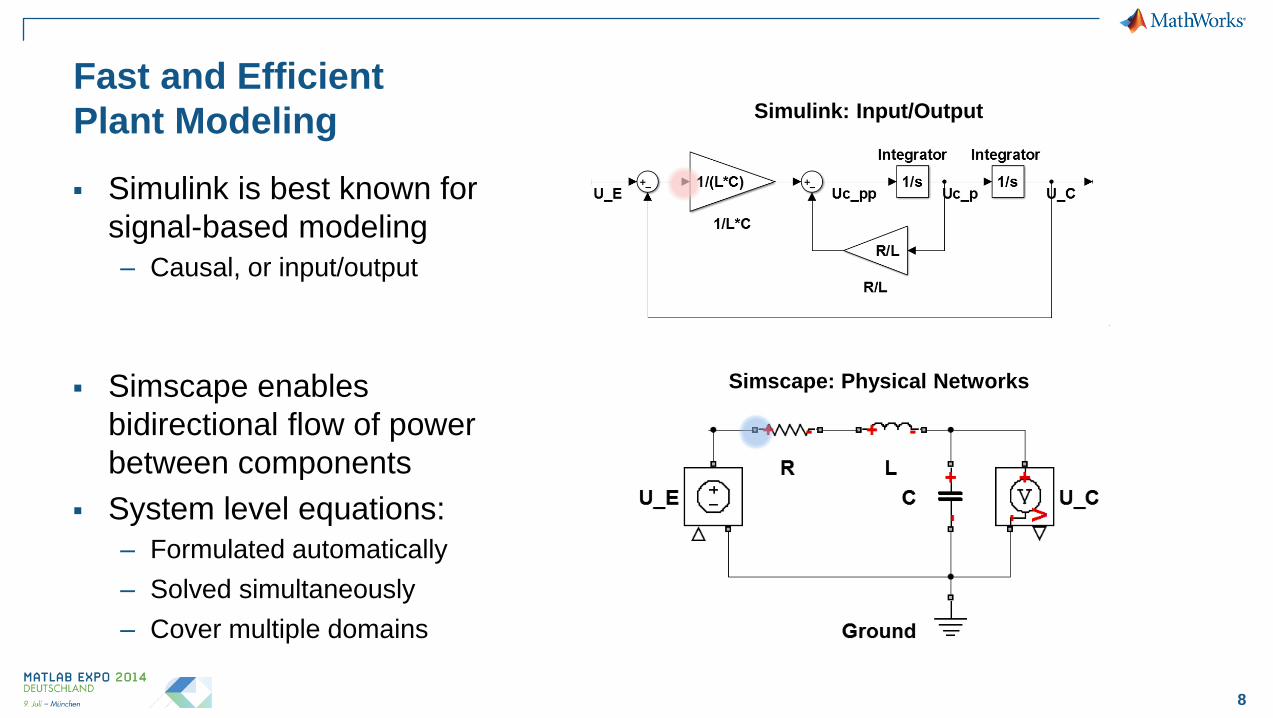
Fast and Efficient
Plant Modeling
Simulink is best known for
signal-based modeling
– Causal, or input/output
Simscape enables
bidirectional flow of power
between components
System level equations:
– Formulated automatically
– Solved simultaneously
– Cover multiple domains
Simulink: Input/Output
Simscape: Physical Networks
9
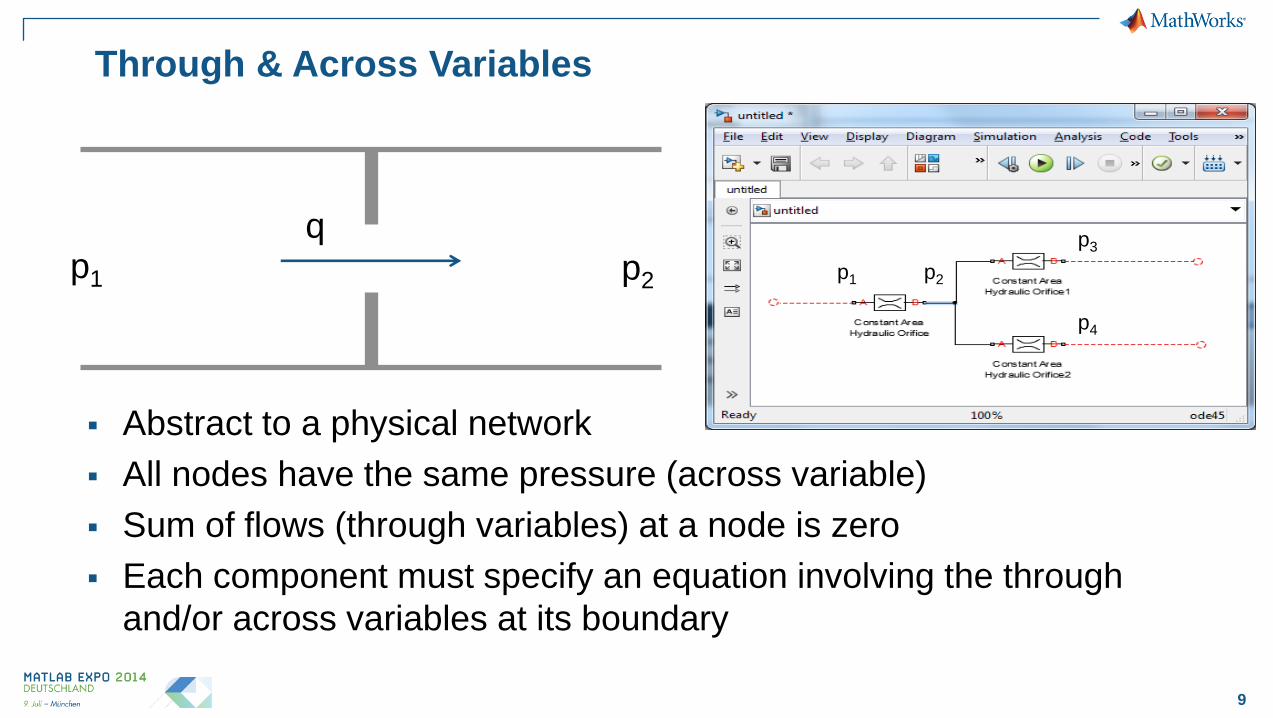
Through & Across Variables
p1 p2
q
Abstract to a physical network
All nodes have the same pressure (across variable)
Sum of flows (through variables) at a node is zero
Each component must specify an equation involving the through
and/or across variables at its boundary
p1 p2
p3
p4
10
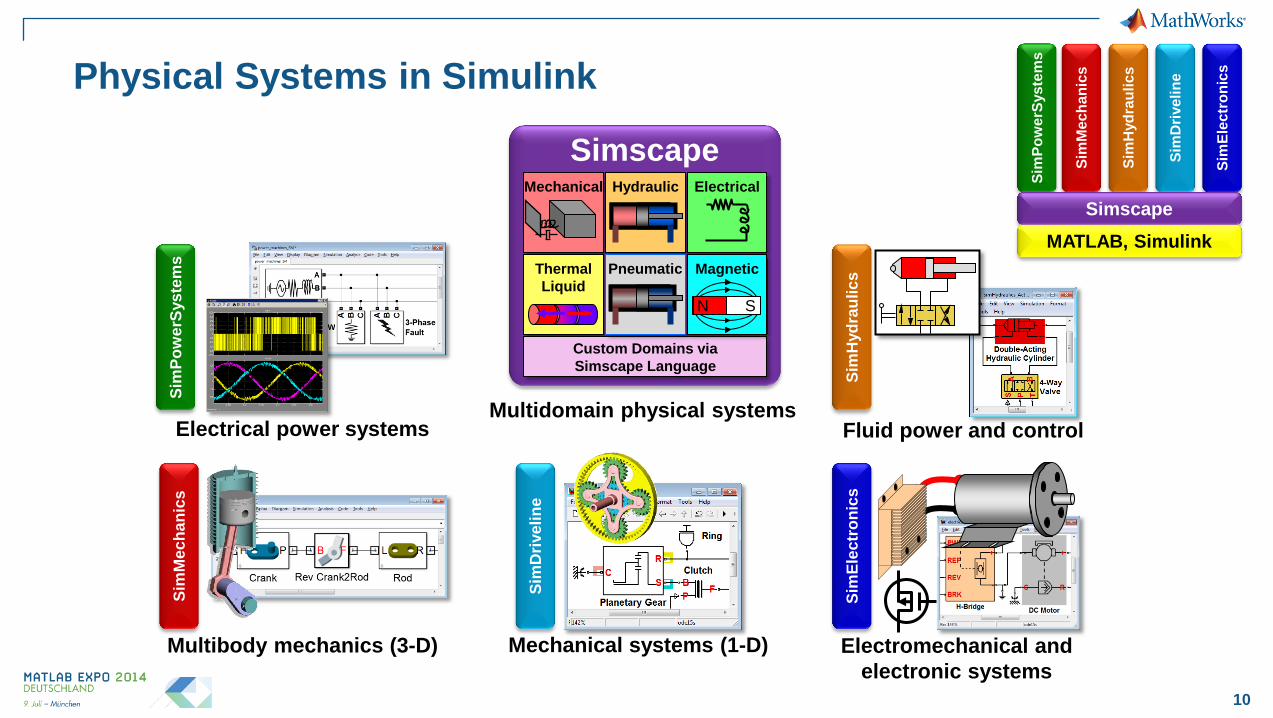
Physical Systems in Simulink
Multibody mechanics (3-D) Mechanical systems (1-D)
Fluid power and control Multidomain physical systems
Electrical power systems
Electromechanical and
electronic systems
Sim
Me
ch
an
ics
Sim
Dri
ve
lin
e
Sim
Hyd
rau
lic
s
Sim
Ele
ctr
on
ics
Sim
Po
we
rSys
tem
s
Simscape
MATLAB, Simulink
Sim
Me
ch
an
ics
Sim
Dri
ve
lin
e
Sim
Hyd
rau
lic
s
Sim
Ele
ctr
on
ics
Sim
Po
we
rSys
tem
s
Simscape Mechanical Hydraulic Electrical
Thermal
Liquid
Custom Domains via
Simscape Language
Pneumatic Magnetic
N S
11
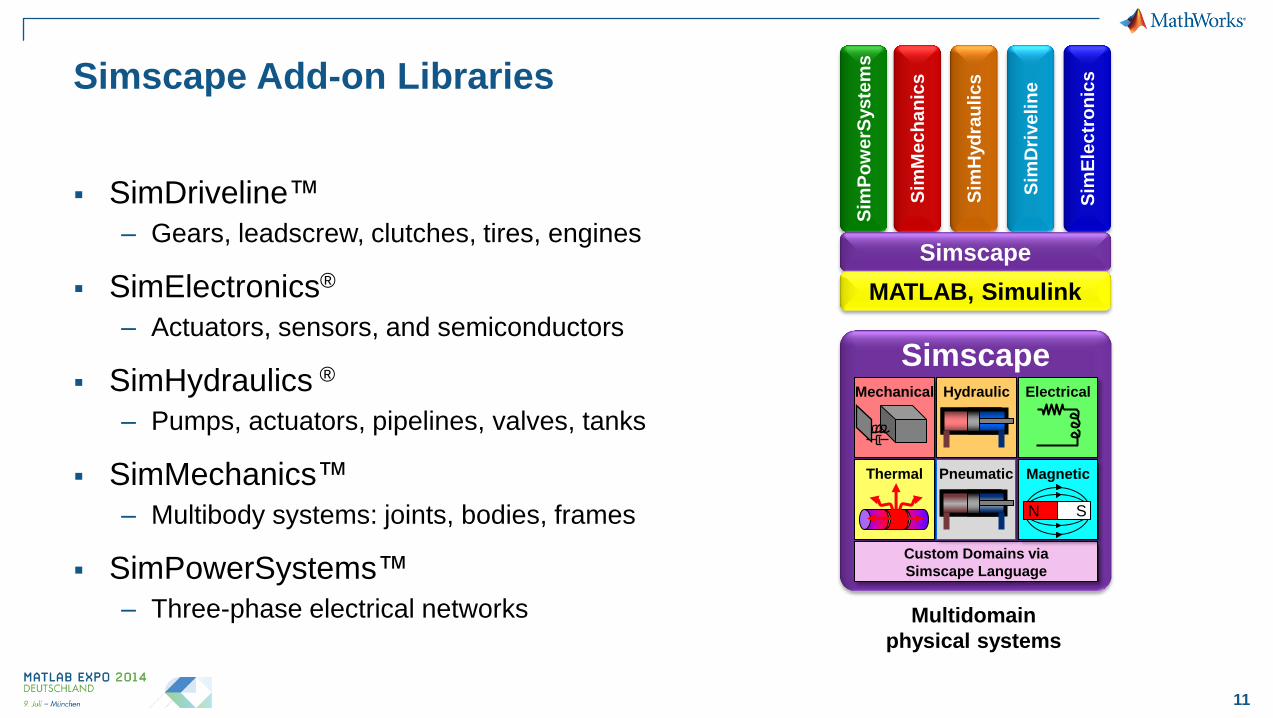
Simscape Add-on Libraries
Multidomain
physical systems
Sim
Me
ch
an
ics
Sim
Dri
ve
lin
e
Sim
Hyd
rau
lic
s
Sim
Ele
ctr
on
ics
Sim
Po
we
rSys
tem
s
Simscape
MATLAB, Simulink
Simscape Mechanical Hydraulic Electrical
Thermal
Custom Domains via
Simscape Language
Pneumatic Magnetic
N S
SimDriveline™
– Gears, leadscrew, clutches, tires, engines
SimElectronics®
– Actuators, sensors, and semiconductors
SimHydraulics ®
– Pumps, actuators, pipelines, valves, tanks
SimMechanics™
– Multibody systems: joints, bodies, frames
SimPowerSystems™
– Three-phase electrical networks
12
Physical Modeling Best Practice
Structure your system and componentize it
Get familiar with the available blocks
Build incrementally
Write test scripts/harnesses
Use appropriate level of fidelity
Add dampers, fluid volumes or capacities to un-stiffen the system
13
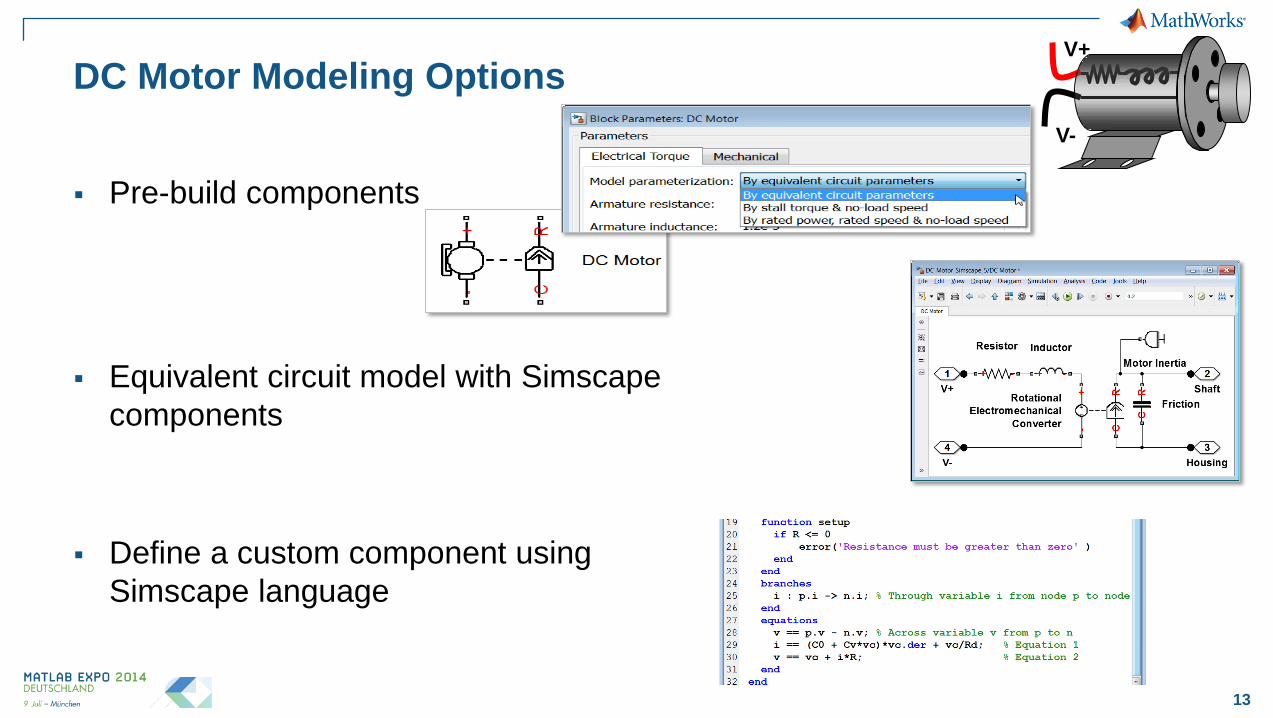
DC Motor Modeling Options V+
V-
Pre-build components
Equivalent circuit model with Simscape
components
Define a custom component using
Simscape language
14
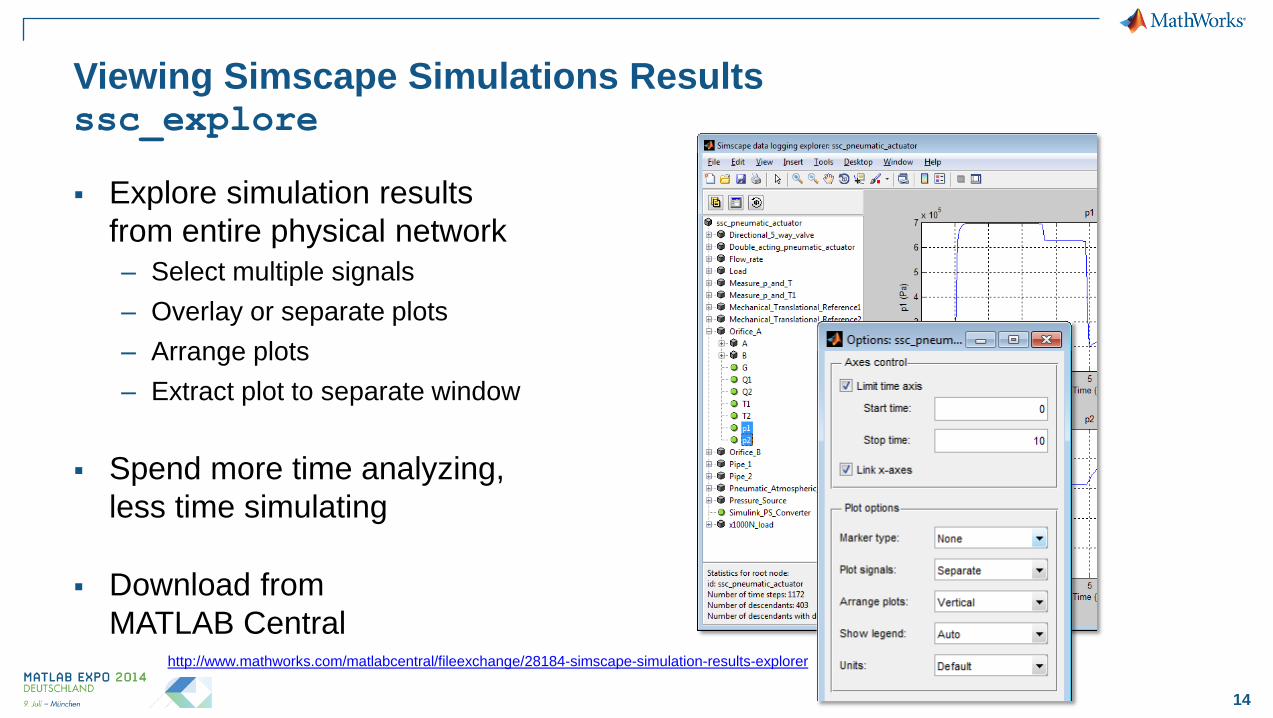
Viewing Simscape Simulations Results ssc_explore
Explore simulation results
from entire physical network
– Select multiple signals
– Overlay or separate plots
– Arrange plots
– Extract plot to separate window
Spend more time analyzing,
less time simulating
Download from
MATLAB Central
http://www.mathworks.com/matlabcentral/fileexchange/28184-simscape-simulation-results-explorer
15
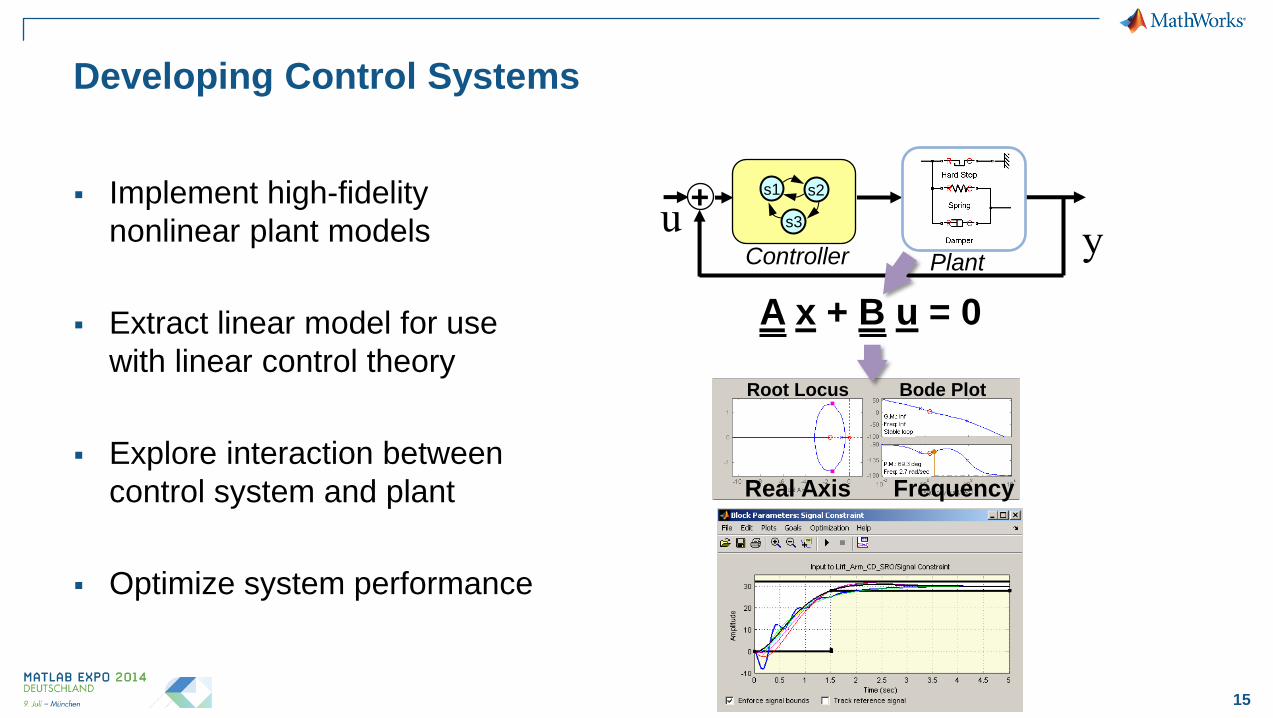
Developing Control Systems
Implement high-fidelity
nonlinear plant models
Extract linear model for use
with linear control theory
Explore interaction between
control system and plant
Optimize system performance
A x + B u = 0
Root Locus Bode Plot
Real Axis Frequency
y Plant
u Controller
s1 s2
s3
+
16
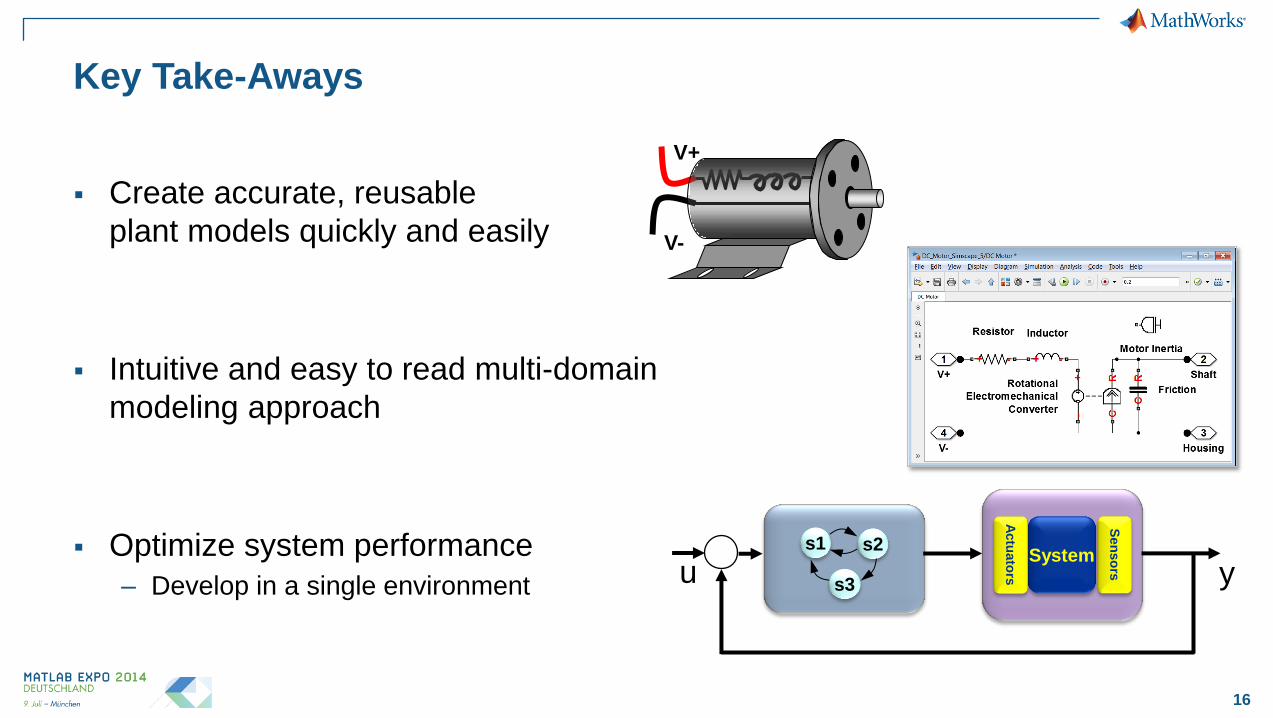
Key Take-Aways
Create accurate, reusable
plant models quickly and easily
Intuitive and easy to read multi-domain
modeling approach
Optimize system performance
– Develop in a single environment
V+
V-
u y s1 s2
s3
System
Actu
ato
rs
Sen
so
rs
17
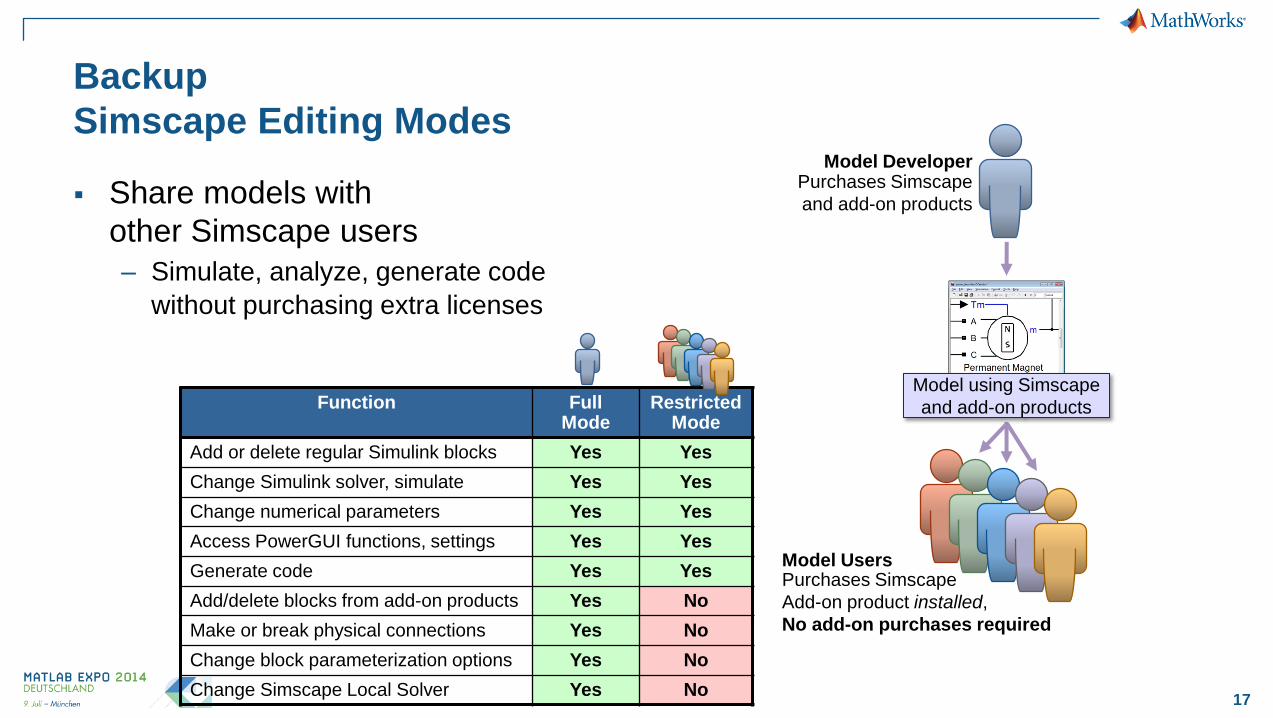
Backup
Simscape Editing Modes
Share models with
other Simscape users
– Simulate, analyze, generate code
without purchasing extra licenses
Model Developer Purchases Simscape
and add-on products
Model Users Purchases Simscape
Add-on product installed,
No add-on purchases required
Function Full Mode
Restricted Mode
Add or delete regular Simulink blocks Yes Yes
Change Simulink solver, simulate Yes Yes
Change numerical parameters Yes Yes
Access PowerGUI functions, settings Yes Yes
Generate code Yes Yes
Add/delete blocks from add-on products Yes No
Make or break physical connections Yes No
Change block parameterization options Yes No
Change Simscape Local Solver Yes No
Model using Simscape
and add-on products
18
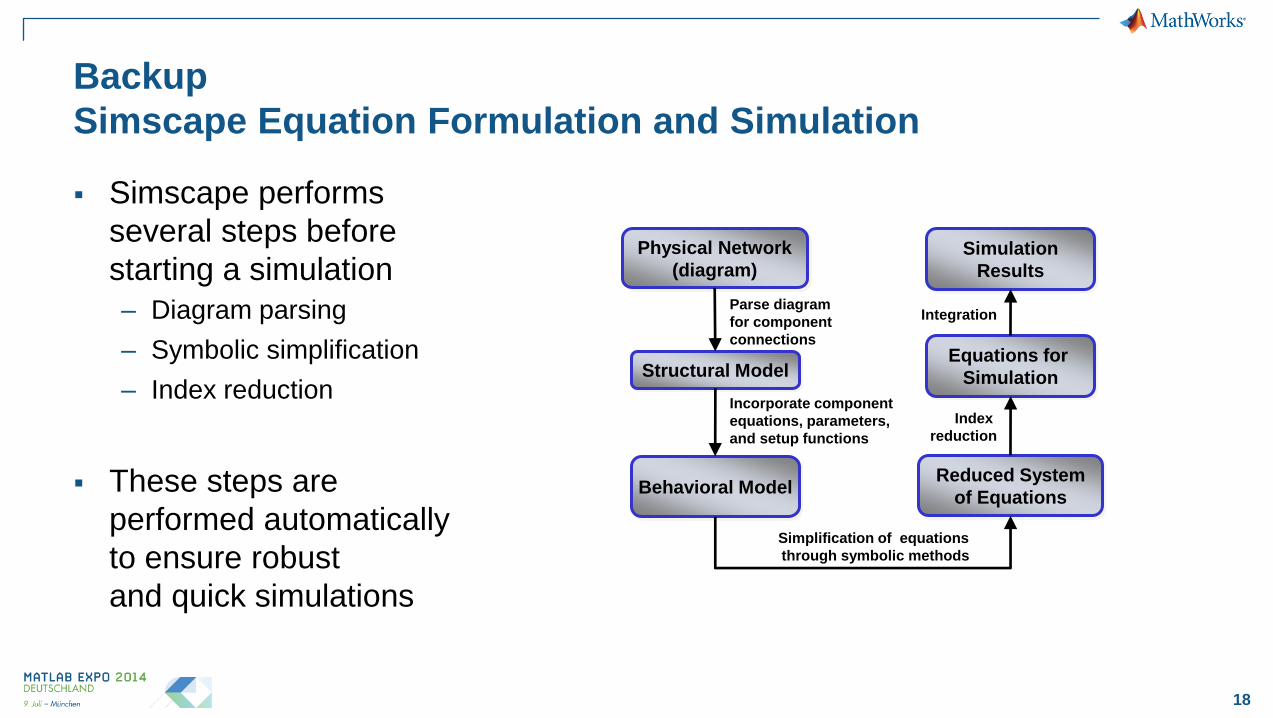
Backup
Simscape Equation Formulation and Simulation
Simscape performs
several steps before
starting a simulation
– Diagram parsing
– Symbolic simplification
– Index reduction
These steps are
performed automatically
to ensure robust
and quick simulations
Physical Network
(diagram)
Structural Model
Behavioral Model Reduced System
of Equations
Equations for
Simulation
Simulation
Results
Parse diagram
for component
connections
Incorporate component
equations, parameters,
and setup functions
Simplification of equations
through symbolic methods
Index
reduction
Integration