-
7/23/2019 Vital Sign Monitoring of A
1/4
-
7/23/2019 Vital Sign Monitoring of A
2/4
Proceedings of IC-NIDC2014
products of breathing and heart rate are derived by using
Bessel functions and Fourier transformation. An MTIfilter is
proposed to cancel out the breathing harmonics.
In Ref. [8] a new algorithm Harmonic Path Algorithm
(HAPA) is proposed which makes use of the
fundamental as well as harmonics of the heart rate signal
to improve the accuracy of heart rate detection. Theauthors in
Ref. [9] presented algorithm to detect motion
rate based on energy in frequency for finding the
respiration rate of the target body. In Ref. [10] the
authors have suggested a new method in which more
than one peak are selected in the heart frequency range
and the process is repeated for several iterations and the
peak which is repeated highly is selected as heart rate. In
Ref. [12] an algorithm based on wavelet transform is
proposed for estimation of heart and breathing rates for
continuous monitoring of a patient.
3 Problem statement
In real life, it is not possible for a person to be
stationaryfor longer time. Therefore, some method is required
todetect motion of the human and still able to calculate thevital
signs. The motion may either be caused by thesubject or by the
radar. In our work, we have consideredthe radar as stationary while
the person may benon-stationary. In next section algorithm
formeasurement of vital signs of moving human is
presented and experimental results are also shown toprove the
validity of proposed method.
4 Movement detection algorithm
In autocorrelation the signal is matched with its
shiftedversion. It shows how fast the signal changes. If thesubject
in front of the radar is stationary then the signalchanges very
slowly. While if the target is moving thenthe signal varies very
fast. The following two graphsshow the autocorrelation of two
signals in case ofstationary and non-stationary human.
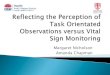
Figure 1Normalized autocorrelation function of signalreflected
from stationary human
Figure 2Normalized autocorrelation function of signalreflected
from non-stationary human
The width of the main lobe (centered at zero) isconsidered as
the criteria of moment detection. If thewidth of this lobe becomes
extremely narrower than thestationary case, then the body is
supposed to benon-stationary. Otherwise, the body is considered
asstationary. Let be the average width of the main lobein
stationary state, is the width when the object ismoving and c is
constant which shows the sensitivity ofmotion sensing (here a value
of 3 is assigned) then therelation given in following equation is
used for momentdetection
(1)
The relation in Eq. (1) means that the width of
autocorrelation function is decreased during motion of
human in front of radar, which means that the signal is
varied fast and thus has less correlation with its
shiftedversion in time domain. Fig. 1 show the normalized
autocorrelation function of the signal from the stationary
human whereas in Fig. 2 the person is in motion state. It
is clear that the width of main lobe in Fig. 1 is three time
more wider than width of Fig. 1.
5 Respiration and heart-rate detection
An averaging filter is used to remove the clutter from
thereflected signal. The signal is converted to frequencydomain by
using Fast Fourier transform. The respirationrate is simply the
highest peak among the values in the
spectrum. The heart rate is found by using algorithm inRef.
[10]. But before finding the heart and breathingrates, the object
is checked whether stationary ornon-stationary. If the object is
stationary, then thenrespiration and heart rate are calculated.
Otherwise, themost recent value of respiration and heart rate
ismaintained, and the movement is continuously checked.When the
body comes to stationary position, thenrespiration and heart rates
are calculated again. Thefollowing block diagram explains the
concept clearly.
-1500 -1000 -500 0 500 1000 1500-1
-0.5
0
0.5
1
Lag
Normalized
Value
-1500 -1000 -500 0 500 1000 1500-0.5
0
0.5
1
Lag
NormalizedMagnitude
-
7/23/2019 Vital Sign Monitoring of A
3/4
Proceedings of IC-NIDC2014
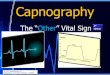
Figure 3 Detection of heart and respiration rate (process
is repeated M times)
The respiration rate is estimated easily by detecting thehighest
peak in the range of respiration frequencies i.e.10 to 30 beats per
minute. Since the heart rate frequencymay be located close to the
harmonics of respirationfrequency and/or the intermodulation
products ofrespiration and heart frequencies, therefore,
somefiltering technique is required to extract the heart ratefrom
the desired range of frequencies. A bank of notchfilters with sharp
bandwidth is used to separate the heartrate from the respiration
harmonics [10]. N peak valuesare determined in the range of 0.8 to
2 Hz from theresulting spectrum. The process is repeated M times
andthe frequency with highest number of repetition andmaximum mean
value is selected as heart rate. Thealgorithm is summarized as
follows.
Algorithm: Vital Signs detection of non-stationary
human
1. Remove the clutter from the received signal.
2. Find the status of the target, whether it isstationary or
moving. If the object is moving,
keep the most recent values of respiration and
heart rate for the period of motion, otherwise,
go to step 3.
3. Transform the signal to frequency domain by
using Fast Fourier Transform (FFT).
4. Detect the highest peak of spectrum as breathing
rate
5. Find the heart rate by using algorithm in [10].
6. Go back to step 2.
6 Experimental results
The breathing rate is measured in case of stationary and
non-stationary subject. The person is sitting at a distance
of approximately 1 meter from the radar. The result of
the breathing rate estimation without movement
detection is shown in Fig. 4. The person is sitting idlein the
period of sample 1-50. It moves in period 51-62
and then stops motion. From Fig. 4, it is clear that
without movement detection, it shows the false
breathing rate during motion period.
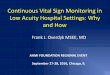
Figure 4 Respiration rate values of a non-stationary
human without motion detection
In Fig. 5, the movement is detected at sample 51 and the
value for breathing rate at 50 is kept constant until the
motion period is ended. After the motion period is
finished, it again starts measurement of respiration rate
as according to the algorithm. It shows better result as
compared to Fig. 4.
Figure 5 Respiration rate values of a non-stationary
human with motion detection
In the second experiment, the heart rate is estimated for
a non-stationary person. In Fig. 6, the stationary period
starts from sample 1-75. At sample 75, the person starts
motion which result in wrong estimation of heart rate as
it is clear from Fig. 6.
Clutter Removal
Movement
Detection
Frequency
domain
transformation
Select highest
peak as
respiration
frequency
N peaks in
range of 0.8 to
2 Hz
0 10 20 30 40 50 60 700
5
10
15
20
25
30
35
X=78
Y=13.6603
Time
Beats/Minute
0 10 20 30 40 50 60 700
2
4
6
8
10
12
14
X=78
Y=12.6925
Beats/Minute
Time
-
7/23/2019 Vital Sign Monitoring of A
4/4
Proceedings of IC-NIDC2014
Figure 6 Heart beat rate values of a non-stationaryhuman without
motion detection
In Fig. 7, the motion is detected at sample 76, and the
value of heart rate at sample 75 is retained for the whole
motion period. Therefore, it result in better estimation as
compared to Fig. 6.
Figure 7 Heart beat rate values of a non-stationaryhuman with
motion detection
From the above experimental results, it is clear that if we
observe the motion of body in each iteration before
measuring the vital signs and instead of wrong detection
of respiration and heart rates, it is better to keep the
most
recent measurement value (before the motion starts) for
the period of motion until the object come back to its
stationary position.
7 Conclusions and future work
The measurement of vital signs for non-stationary
human is discussed. The autocorrelation concept is used
to detect the motion of target. If the signal is changing
fast in the time domain and the width of the main lobe
decreases then motion is detected and the most recent
values of respiration and heart rates are maintained
during motion period. However, the algorithm doesnt
calculate the vital signs during the motion period (it only
maintains the most recent measurement value before the
motion period as the values throughout the motion
period) and waits until the object becomes stationary.
Therefore, this algorithm is working in circumstances
where the patient moves for a short duration of time
while the steady state of patient is stationary. Our futuregoal
is that instead of avoiding the vital signs in motion
period and waiting for the patient to come into rest
position, we will focus on determining the vital signs
during the motion period.
Acknowledgements
This research was supported by the MSIP (Ministry of
Science,
ICT&Future Planning), Korea, under the ITRC
(InformationTechnology Research Center) support program
(NIPA-2014-H0301-14-1017) supervised by the NIPA (National IT
IndustryPromotion Agency)
References
[1] Di Lena, Luigi. "Vital signs monitoring using Ultra Wide
Band pulse radar." (2010).[2] A. Lazaro, D. Girbau, and R.
Villarino, "Analysis of vital
signs monitoring using an ir-UWB radar," Progress
InElectromagnetics Research, Vol. 100, 265-284, 2010.
[3] Staderini, Enrico M. "UWB radars inmedicine." Aerospace and
Electronic Systems Magazine,IEEE 17.1 (2002): 13-18.
[4] McEwan, Thomas E. "Body monitoring and imaging
apparatus and method." U.S. Patent No. 5,766,208. 16
Jun. 1998.[5] Bilich, Carlos G. "Bio-medical sensing using
ultra
wideband communications and radar technology: Afeasibility
study." Pervasive Health Conference and
Workshops, 2006. IEEE, 2006.
[6] M.Y.W.Chia, S.W.Leong, C.K.Sim, K.M.Chan,Through-wall UWB
radar operating within FCCsmask for sensing heart beat and
breathing rate, IEEE
European Microwave Conf. 2005, Vol.3, 1-4, 2005.[7] M.Y.W.Chia,
S.W.Leong, C.K.Sim, K.M.Chan,
Through-wall UWB radar operating within FCCs mask
for sensing heart beat and breathing rate, IEEE
European Microwave Conf. 2005, Vol.3, 1-4, 2005.[8] Nguyen, Van,
Abdul Q. Javaid, and Mary Ann Weitnauer.
"Harmonic Path (HAPA) algorithm for non-contact vitalsigns
monitoring with IR-UWB radar."Biomedical
Circuits and Systems Conference (BioCAS), 2013 IEEE.IEEE,
2013.
[9] Sharafi, Azadeh, Mehran Baboli, and Mohammad Eshghi."A new
algorithm for detection motion rate based on
energy in frequency domain using UWBsignals." Bioinformatics and
Biomedical Engineering
(iCBBE), 2010 4th International Conference on. IEEE,2010.
[10] Faheem Khan, Jeong Woo Choi and Sung Ho Cho.Design issues
in vital sign monitoring through IR-UWBradar. To be published in
ISCE 2014, Korea.
[11] Win, Moe Z., and Robert A. Scholtz. "Impulse radio:
How it works." IEEE Communications letters 2.2 (1998):36-38.
[12] Baboli, Mehran, et al. "A new wavelet based algorithmfor
estimating respiratory motion rate using UWB
radar." Biomedical and Pharmaceutical Engineering,2009.
ICBPE'09. International Conference on. IEEE,2009.
0 20 40 60 80 100 1200
20
40
60
80
100
Time
Beats
/Minute
0 20 40 60 80 100 1200
10
20
30
40
50
60
70
Time
Beats/Minute