Embed Size (px)
Citation preview
� Sony has provided a robot platform for researchand development in physical agents, namely, fullyautonomous legged robots. In this article, wedescribe our work using Sony’s legged robots toparticipate at the RoboCup-98 legged robotdemonstration and competition. Robotic soccerrepresents a challenging environment for researchin systems with multiple robots that need toachieve concrete objectives, particularly in thepresence of an adversary. Furthermore, RoboCupoffers an excellent opportunity for robot entertain-ment. We introduce the RoboCup context andbriefly present Sony’s legged robot. We developeda vision-based navigation and a Bayesian localiza-tion algorithm. Team strategy is achieved throughpredefined behaviors and learning by instruction.
Problem solving in complex domains nec-essarily involves multiple agents, dynam-ic environments, and the need for learn-
ing from feedback and previous experience.Robotic soccer is an example of one such com-plex task where agents need to collaborate inan adversarial environment to achieve specificobjectives.
Research in robotic soccer has been pursuedalong several different aspects of the problem:simulation, small-size, medium-size, andlegged robots.1
In this article, we present some of the workdeveloped with the legged robots built by Sonyat Carnegie Mellon University (CMU), in theLaboratoire de Robotique de Paris (LRP), and at
Osaka University. These research groups partic-ipated at the RoboCup-98 games and demon-strations of the quadruped robots with teamsnamed CMTRIO, LES TITIS PARISIENS, and BABY
TIGERS, respectively. Legged robots represent aremarkable advancement for robotics. In theparticular context of robotic soccer, leggedrobots provide an interesting opportunity forrobot entertainment.
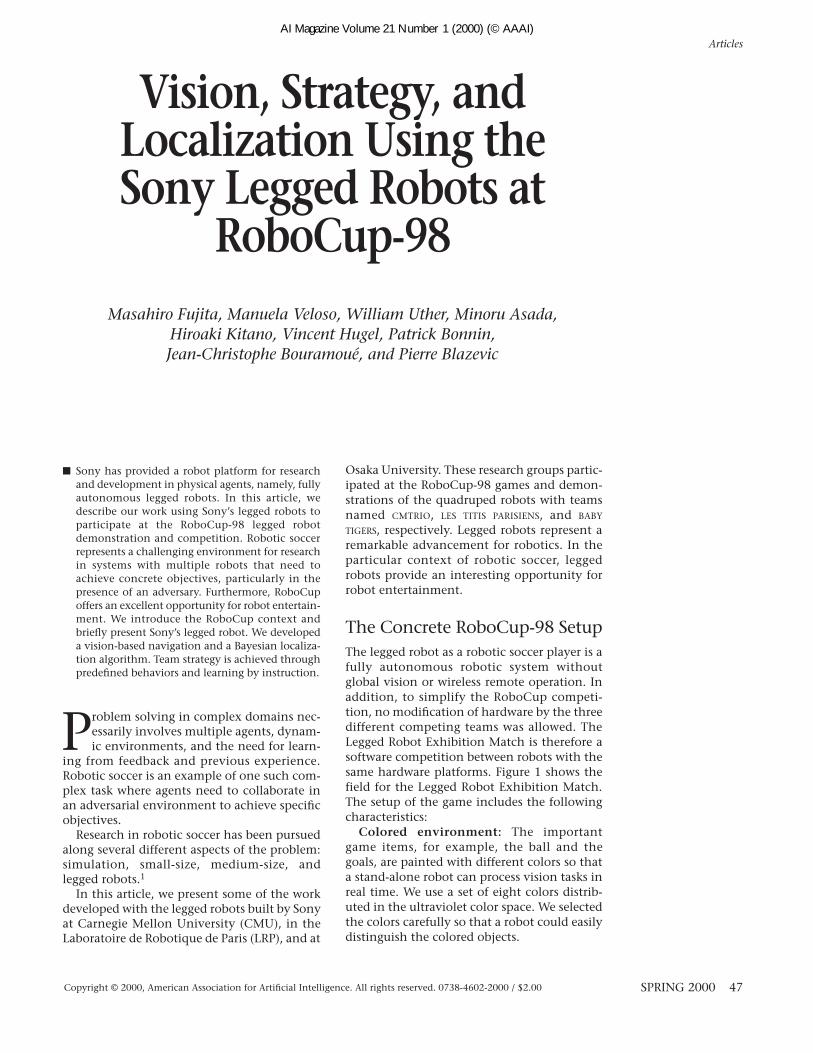
The Concrete RoboCup-98 SetupThe legged robot as a robotic soccer player is afully autonomous robotic system withoutglobal vision or wireless remote operation. Inaddition, to simplify the RoboCup competi-tion, no modification of hardware by the threedifferent competing teams was allowed. TheLegged Robot Exhibition Match is therefore asoftware competition between robots with thesame hardware platforms. Figure 1 shows thefield for the Legged Robot Exhibition Match.The setup of the game includes the followingcharacteristics:
Colored environment: The importantgame items, for example, the ball and thegoals, are painted with different colors so thata stand-alone robot can process vision tasks inreal time. We use a set of eight colors distrib-uted in the ultraviolet color space. We selectedthe colors carefully so that a robot could easilydistinguish the colored objects.
Articles
SPRING 2000 47
Vision, Strategy, and Localization Using the Sony Legged Robots at
RoboCup-98Masahiro Fujita, Manuela Veloso, William Uther, Minoru Asada,
Hiroaki Kitano, Vincent Hugel, Patrick Bonnin, Jean-Christophe Bouramoué, and Pierre Blazevic
Copyright © 2000, American Association for Artificial Intelligence. All rights reserved. 0738-4602-2000 / $2.00
AI Magazine Volume 21 Number 1 (2000) (© AAAI)
A Quadruped Legged RobotThe robot soccer player used in RoboCupLegged Robot Exhibition Match is based onOPEN-R (Fujita and Kageyama 1997), which isproposed by Sony as a standard architecture forrobot entertainment systems (Fujita andKitano 1998). The significant feature of OPEN-Ris a decomposition technology for both hard-ware and software modules. This technologyenables us to build various robot styles, such asa quadruped robot and a wheel-based robot aswell as various software configurations (Fujita,Kitano, and Kageyama 1998). In addition, forsoftware researchers, OPEN-R can provide a high-ly reliable robot platform so that they can con-centrate on software development for a varietyof tasks, including new image-processing algo-rithms, posture control, and agent architecture.Furthermore, there is no need to develop soft-ware from scratch because OPEN-R providessome software modules, such as color detectionand walking control. Thus, OPEN-R canaccumulate the developed software as reusablecomponents and accelerate autonomous robotresearch.
In addition, hardware researchers can designtheir own hardware modules with an OPEN-R
interface, which can then attach to an existing
Team: Each team has three players. This isthe minimum number for each team to dosome “team play” or collaboration tasks, whichis one of the research objectives of RoboCup.
Field size: The field size (2 meters × 3 meters)should provide enough space for six robots tonavigate while they dribble and pass the ball.
Slanted wall: The walls surrounding thefield are at a ±45-degree slant. In addition, wealso made a triangular slanted wall for everycorner. These slanted walls effectively returnthe ball to the field when the ball is pushedagainst the border, which is a frequent occur-rence at least in our practice with remote-con-trolled legged robots.
Landmarks: Six poles are used as landmarksfor self-location. Each landmark is painted withtwo different colors so that six different polescan be painted with only three different colors.The robot should measure the angles of threedifferent poles to get the self-location in thefield.
In addition to the regular soccer game, weevaluate software performance based on theRoboCup Physical Challenge (Asada et al.1998; Kitano et al. 1998), which is defined bythe RoboCup Challenge Committees.
Articles
48 AI MAGAZINE
Robot A team : BlueRobot B team : RedBall : Orange
Light Blue
Light Blue
Pink
Goal(Light Blue)
Goal(Yellow)
Green
Green
Pink
Pink
Pink
Pink
PinkYellow
Yellow
Field(Green)
Figure 1. The RoboCup-98 Soccer Field for Legged Robot Competition.
OPEN-R system. In RoboCup-98, we prohibitedmodification of robot hardware; however, inprinciple, it was possible for us to build variousstyles of robot with various sensors and actua-tors that have OPEN-R interface.
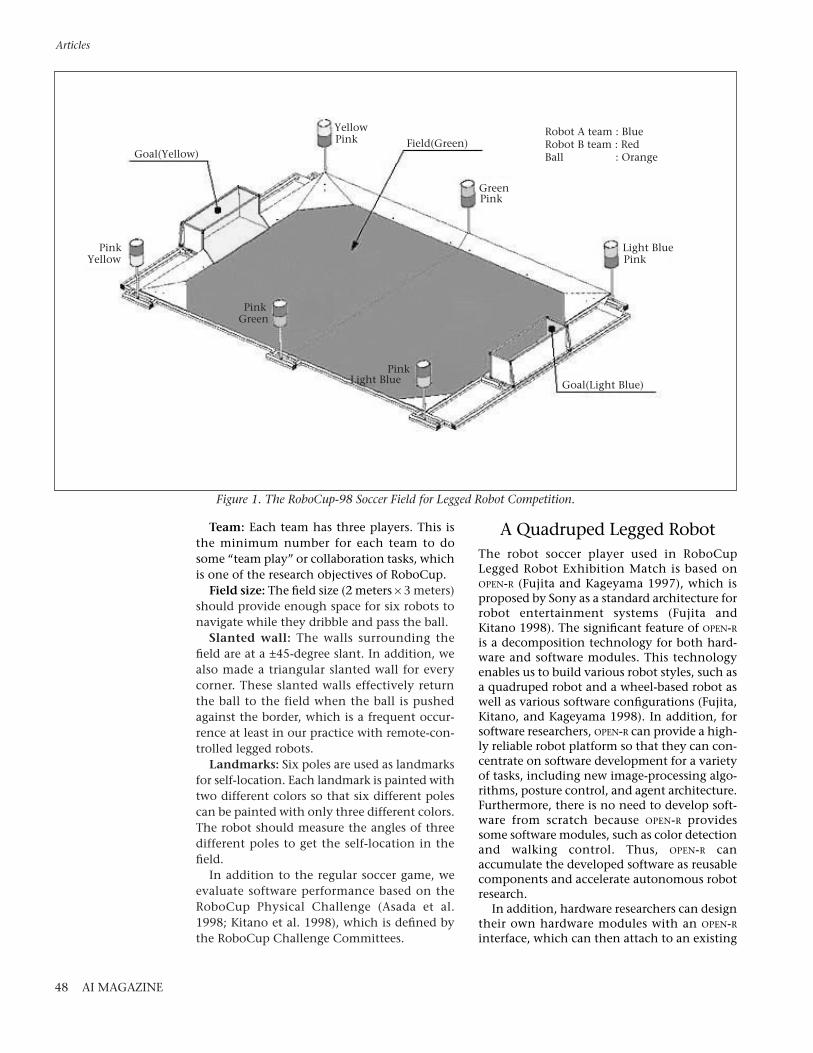
For RoboCup-98, we deployed a legged robotwith four legs and one head, each of which hasthree degrees of freedom and rich sensorychannels; for example, a head has a color CCDcamera, a stereo microphone, touch sensors,and a loudspeaker.
Most intelligent autonomous robots areimplemented with a wheel-based mechanicalconfiguration. A wheel-based robot has anadvantage in simplicity of motion control, so
that researchers can concentrate on vision,planning, and other high-level issues. Howev-er, because our goal is robot entertainment,we have a different emphasis. We believe thatthe capability of representation and commu-nication using gesture and motion is impor-tant in entertainment applications. Therefore,we chose a mechanical configuration for ourrobot as a quadruped-legged type, as shown infigure 2.
The merits of the quadruped-legged configu-ration are that walking control of a quadruped iseasier than that of a biped robot and that whenin a sitting posture, two hands are free to move,therefore allowing them to present emotions or
Articles
SPRING 2000 49
Figure 2. Legged Robot.

ors: The colors are orange (ball), light blue(goal and marker), yellow (goal and marker),pink (marker), light green (marker), dark blue(teammate-opponent), and dark red (oppo-nent-teammate).
Active ball chasing: The robot activelyinterleaves searching for the ball and localiza-tion on the field to evaluate both an appropri-ate path to the ball and final positioning nextto the ball.
Game-playing behaviors: Robots playattacking and goal-keeping positions.
In this section, we present our ongoingresearch in addressing these issues.
Supervised Learning of Ultraviolet ColorsThe Sony legged robot has specialized hard-ware for the detection of colors. However, thishardware still requires presetting of appropri-ate thresholds in YUV color space for thedesired colors. It is well known that coloradjustments are highly sensitive to a variety offactors, such as lighting and shading.
Given that the legged robots inevitably actunder many different conditions, at CarnegieMellon we developed a method to automatical-ly acquire the necessary YUV color thresholds.First, we developed a tool to manually experi-ment with different boundaries in the UVspace.2 Second, building on the experienceusing the YUV space tool, we developed a clas-sification algorithm to automatically learn thethresholds that maximize the accuracy of thedesired color detections. Our algorithm relieson supervised classification using a set of train-ing and testing images.
By moving the robot to different positionson the field, we accumulate a series of images.For each image, we manually classify theregions of the different colors. This manuallabeling is easily done through an interfacethat we developed that overlays the originalimage and the supervised classification. Areasof the image can have their correct classifica-tion specified using tools similar to PC-typepaint programs.
Once the data have been classified, the YUVcolor thresholds are learned separately for eachcolor using a conjugate gradient-descent–basedalgorithm. Each threshold is softened byreplacing it by a sigmoid function:
C = 1/1 +et(a – x) (1)
where C is the classification for this sigmoid, ais the value of this threshold, and t is a variableequivalent to the current temperature in a sim-ulated annealing algorithm. The classificationsof the different thresholds are multiplied, andgradient descent is performed on the sum-
communicate with a human. Because each legor hand has to be used for various purposesbesides walking, we assigned three degree offreedom for each leg-hand. In addition, weadded a tail and three degrees of freedom for theneck-head so that the robot had enough repre-sentation and communication capabilitiesusing motions. During the RoboCup games, legsare not necessarily used for expressing emo-tions. However, they can be used for sophisticat-ed control of balls, such as passing a ball to theside or back or engaging in deceptive motions.
One possible disadvantage to using a leggedrobot is that their moving speed is not as fast aswheel-based robots. In the future, the speedissue might be resolved when galloping ismade possible. For now, legged robots competein a dedicated league. Although serious hard-ware limitations exist, teams with efficient leg-motion coordination can have major advan-tages in the game.
In general, it is difficult for a stand-alone(autonomous) robot to perform navigation andperception tasks in real time in a real-worldenvironment because of its limited computa-tional power. Remotely controlled robots andsystems with globally overlooking cameras canprovide the computational power off board.These solutions have disadvantages, such asthe need for having a video transmitter foreach robot in a remotely controlled system andthe lack of individual views with the globalvision.
We believe that technologies for processingimages from each individual robot viewpointwithout any global information will becomeimportant in robot entertainment. Therefore,we decided to build the RoboCup system withstand-alone robots under local communicationconstraint. We successfully resolved two hard-ware issues to enable full on-board vision sys-tem for small-size robots: (1) small camera sizeand (2) large on-board processor power. Wesolved these problem by actually manufactur-ing a dedicated camera and a processor chip(Kitano, Fujita, and Kageyama 1998).
CMTRIO: Vision-Based NavigationEach legged robot for RoboCup-98 wasequipped with a single perception sensor,namely, a vision camera. The hardware-basedvision processor provides a robust eight-colordiscrimination. Robots need to act solely inresponse to the visual input perceived. AtCarnegie Mellon University (CMU), we havetherefore decomposed our work according tothe following aspects:
Reliable detection of all the relevant col-
Articles
50 AI MAGAZINE

squared error. Initially, the temperature is quitehigh. It is reduced gradually over time as thesigmoids are learned. In our experiments, wegenerally use about 20 images for training. Thelearning algorithm converges in less than onehour achieving a high classification accuracy.
Bayesian Probabilistic LocalizationThe CMU legged robot team uses Markovianlocalization to determine the robot position onthe field. Relying on dead reckoning in thelegged robot for localization is completelyunrealistic. The effects of movement actionsare highly noisy, and modeling them accurate-ly did not seem feasible to us. However, tocompensate for the highly unreliable deadreckoning, the field environment for Robo-Cup-98 included several fixed colored land-marks. Therefore, at CMU, we developed aBayesian localization procedure (for example,Burgard et al. [1998] and Elfes [1989]). Becausethe robot cannot keep enough markers in viewat all times to calculate its location directly, ouralgorithm used a probabilistic method of local-ization using triangulation based on two land-marks.
The field is discretized in grid locations. Thecontinuous robot head angles are also dis-cretized. We create a state space with these dis-cretized grid cells and robot headings. Observa-tions of the landmarks are combined with thestate space for the position calculation. Thereare two passes to our localization algorithm.The first pass incorporates observations intoour probability distribution. The second passtakes into account the movement actionsselected. Incorporation of observations is basedon Bayes’s rule
(2)
where P(Si) is the a priori probability that therobot is in state Si, P(Si | O) is the posterior prob-ability that the robot is in state Si given that ithas just seen observation O, and P(O | Si) is theprobability of observing O in state Si.
To represent the probability distributionP(Si), we use a table of values. The table is athree-dimensional mapping X × Y × θ → S. Atable of values was chosen because some of thedistributions we want to represent do not havea nice parametric form. For example, given auniform prior distribution, the observation ofthe angle between two markers gives a high-probability circle through the state space thatis not representable by a Gaussian distribution.Incorporation of movement is based on a tran-sition probability matrix. Given a previousmovement M, for each state, the algorithm
P S OP S P O S
P S P O Si
i i
j jj
||
|( ) = ( ) ( )
( ) ( )∑
computes the probability that the robot be inthat state
(3)
where P(Sj) is the a priori probability of state Sj,and P(Sj) ⇒ Si| M) is the probability of movingfrom state Sj to state Si given the movement M.It is assumed that the transition probabilities,P(Sj ⇒ Si | M), take into account any noise in M.
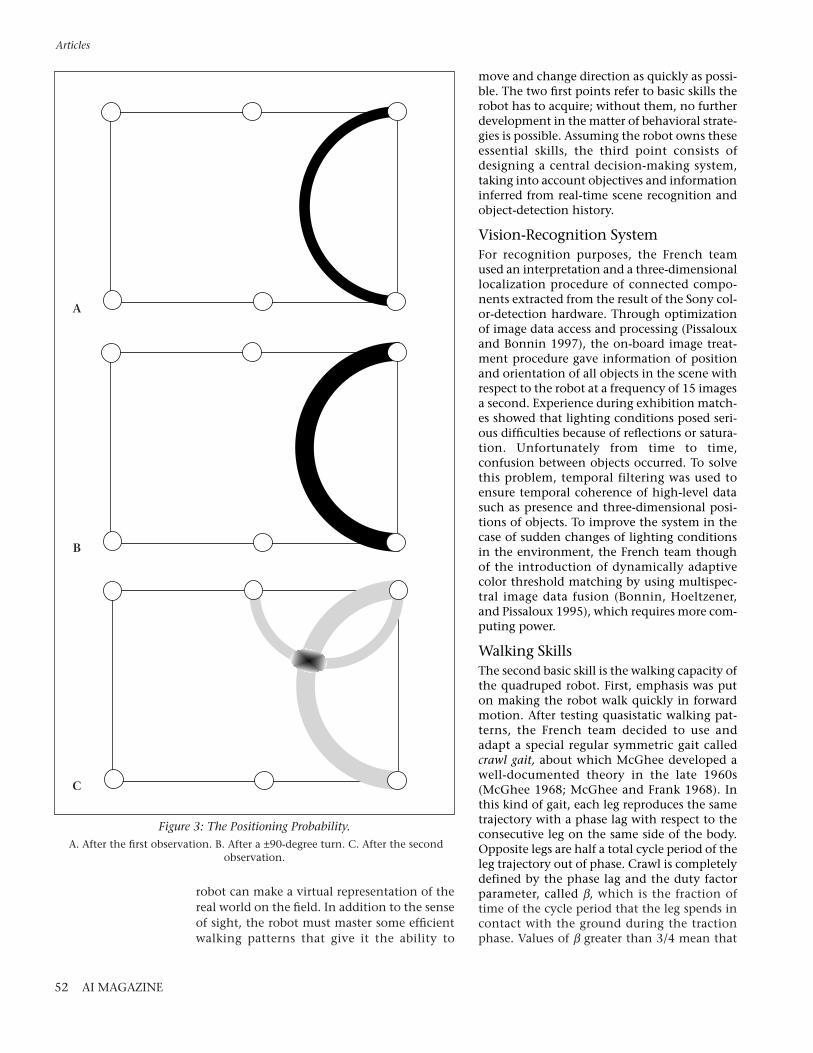
For example, imagine the robot sees an angleof 90 degrees between 2 markers, turns to theleft, and then sees an angle of 90 degreesbetween 2 more markers. Initially, it does notknow where it is—our prior distribution is flat.After its first observation, the projection of thestate probability matrix onto the X, Y planewould be as shown in figure 3a. During theturn, the projection spreads over the X, Yplane, representing the increased uncertaintyintroduced by the dead reckoning as the robotturns (figure 3b). The second observation final-ly localizes the robot (figure 3c).
Our localization algorithm is invoked active-ly; that is, the robot searches for two landmarkswhen the maximum state probability is belowa predefined threshold. In our experiments, therobots localize themselves with high accuracy.
Role-Based BehaviorsFollowing up on our experience with the small-size RoboCup wheeled robots (Stone and Veloso1999; Veloso et al. 1998), we developed differ-ent behaviors based on positioning on the field.As of now, robots play two different roles,namely, (1) attacking and (2) goal keeping.
The procedure used by an attacking robotconsists of the following steps: (1) find the ball;(2) localize attacking goal; (3) position behindthe ball, aligned with the goal; and (4) shoot orpass.
The procedure used by the goal-keeping robotis a simplified version of the CMUNITED 1997 goalkeeper and consisted of the following steps: (1)find the ball, (2) remain close to the goal, (3)move sideways aligned with the ball, and (4)clear the ball when it gets close to it.
LES TITIS PARISIENS:Walking and Strategy
To play soccer, the three Sony pet robots ofeach team must behave autonomously. Withregard to the control system of these machines,the French RoboCup team focused on threepoints that appear of primary importance,namely, (1) the vision-recognition system, (2)the design of walking patterns, and (3) thestrategy chosen to play the soccer games.Thanks to its visual-sensing capacity, every
P S M P S P S S Mi jj
j i| |( ) = ( ) ⇒( )∑
Articles
SPRING 2000 51
move and change direction as quickly as possi-ble. The two first points refer to basic skills therobot has to acquire; without them, no furtherdevelopment in the matter of behavioral strate-gies is possible. Assuming the robot owns theseessential skills, the third point consists ofdesigning a central decision-making system,taking into account objectives and informationinferred from real-time scene recognition andobject-detection history.
Vision-Recognition SystemFor recognition purposes, the French teamused an interpretation and a three-dimensionallocalization procedure of connected compo-nents extracted from the result of the Sony col-or-detection hardware. Through optimizationof image data access and processing (Pissalouxand Bonnin 1997), the on-board image treat-ment procedure gave information of positionand orientation of all objects in the scene withrespect to the robot at a frequency of 15 imagesa second. Experience during exhibition match-es showed that lighting conditions posed seri-ous difficulties because of reflections or satura-tion. Unfortunately from time to time,confusion between objects occurred. To solvethis problem, temporal filtering was used toensure temporal coherence of high-level datasuch as presence and three-dimensional posi-tions of objects. To improve the system in thecase of sudden changes of lighting conditionsin the environment, the French team thoughof the introduction of dynamically adaptivecolor threshold matching by using multispec-tral image data fusion (Bonnin, Hoeltzener,and Pissaloux 1995), which requires more com-puting power.
Walking SkillsThe second basic skill is the walking capacity ofthe quadruped robot. First, emphasis was puton making the robot walk quickly in forwardmotion. After testing quasistatic walking pat-terns, the French team decided to use andadapt a special regular symmetric gait calledcrawl gait, about which McGhee developed awell-documented theory in the late 1960s(McGhee 1968; McGhee and Frank 1968). Inthis kind of gait, each leg reproduces the sametrajectory with a phase lag with respect to theconsecutive leg on the same side of the body.Opposite legs are half a total cycle period of theleg trajectory out of phase. Crawl is completelydefined by the phase lag and the duty factorparameter, called β, which is the fraction oftime of the cycle period that the leg spends incontact with the ground during the tractionphase. Values of β greater than 3/4 mean that
robot can make a virtual representation of thereal world on the field. In addition to the senseof sight, the robot must master some efficientwalking patterns that give it the ability to
Articles
52 AI MAGAZINE
Figure 3: The Positioning Probability.A. After the first observation. B. After a ±90-degree turn. C. After the second
observation.
A
B
C
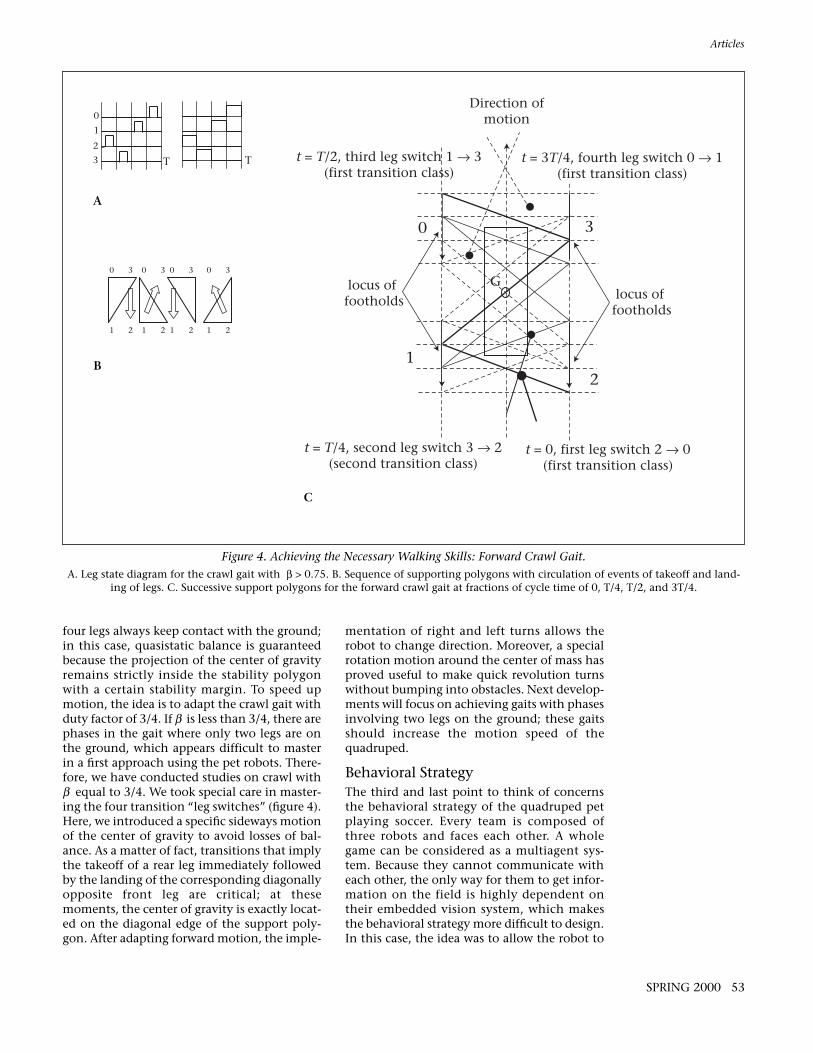
four legs always keep contact with the ground;in this case, quasistatic balance is guaranteedbecause the projection of the center of gravityremains strictly inside the stability polygonwith a certain stability margin. To speed upmotion, the idea is to adapt the crawl gait withduty factor of 3/4. If β is less than 3/4, there arephases in the gait where only two legs are onthe ground, which appears difficult to masterin a first approach using the pet robots. There-fore, we have conducted studies on crawl withβ equal to 3/4. We took special care in master-ing the four transition “leg switches” (figure 4).Here, we introduced a specific sideways motionof the center of gravity to avoid losses of bal-ance. As a matter of fact, transitions that implythe takeoff of a rear leg immediately followedby the landing of the corresponding diagonallyopposite front leg are critical; at thesemoments, the center of gravity is exactly locat-ed on the diagonal edge of the support poly-gon. After adapting forward motion, the imple-
mentation of right and left turns allows therobot to change direction. Moreover, a specialrotation motion around the center of mass hasproved useful to make quick revolution turnswithout bumping into obstacles. Next develop-ments will focus on achieving gaits with phasesinvolving two legs on the ground; these gaitsshould increase the motion speed of thequadruped.
Behavioral StrategyThe third and last point to think of concernsthe behavioral strategy of the quadruped petplaying soccer. Every team is composed ofthree robots and faces each other. A wholegame can be considered as a multiagent sys-tem. Because they cannot communicate witheach other, the only way for them to get infor-mation on the field is highly dependent ontheir embedded vision system, which makesthe behavioral strategy more difficult to design.In this case, the idea was to allow the robot to
Articles
SPRING 2000 53
Figure 4. Achieving the Necessary Walking Skills: Forward Crawl Gait.A. Leg state diagram for the crawl gait with β > 0.75. B. Sequence of supporting polygons with circulation of events of takeoff and land-
ing of legs. C. Successive support polygons for the forward crawl gait at fractions of cycle time of 0, T/4, T/2, and 3T/4.
0
1
3
2
0
1
3
2
0
1
3
2
0
1
3
2
T
0
1
2
3 T
1
0
2
3
G
Direction ofmotion
t = T/2, third leg switch 1 → 3(first transition class)
t = 3T/4, fourth leg switch 0 → 1(first transition class)
locus of footholds
locus of footholds
t = T/4, second leg switch 3 → 2(second transition class)
t = 0, first leg switch 2 → 0(first transition class)
A
B
C
BABY TIGERS: Behavior Acquisition by Teaching
The final goal of the Legged Robot Project atOsaka University was to establish the method-ology to acquire behaviors for team coopera-tion in the RoboCup context, from the interac-tions between the legged robots throughmulti–sensor motor coordinations. The desiredbehaviors can be categorized into three levels:(1) basic, (2) basic cooperation, and (3) higherteam cooperation. In this section, we brieflyexplain our first step for the first-level skillacquisition with preliminary results, that is,behavior acquisition by direct teaching.
The most fundamental feature of the leggedrobot is that they move by their four legs (12degrees of freedom), which is different fromconventional mobile robots (2 or 3 degrees offreedom). From the viewpoint of sensor motorlearning and development, multisensory infor-mation and multi–degree-of-freedom controlshould be established simultaneously; that is,affecting each other, the sensory information isabstracted, and the multijoint motions are wellcoordinated at the same time (Asada 1996).
However, it seems difficult for artificial sys-tems to develop both together. Our goal is todesign such a method. From our experiences onrobot learning, we realized that the number oftrials by real robot is limited, and a good trade-off between computer simulations and realrobot experiences is essential for good perfor-mance. However, the computer simulation ofthe legged robots seemed difficult to build. Wethen decided to adopt a direct teaching methodto reduce the number of trials by real robot.
First, we collected test data, pairs of anaction command given by a human trainer,and the sensory information during the actionexecution. Next, we apply C4.5 (Quinlan 1993)to the test data to extract rule sets. Then, thevalidity of the rule sets were checked againsttest data by applying the rule sets. Specifica-tions of the data for shooting skill acquisitionare as follows:
Action command: Forward, backward, leftshift, right shift, left rotation, and right rota-tion (20 degrees a second) (these abstractedaction commands will be decomposed intomore primitive motor commands in the future)
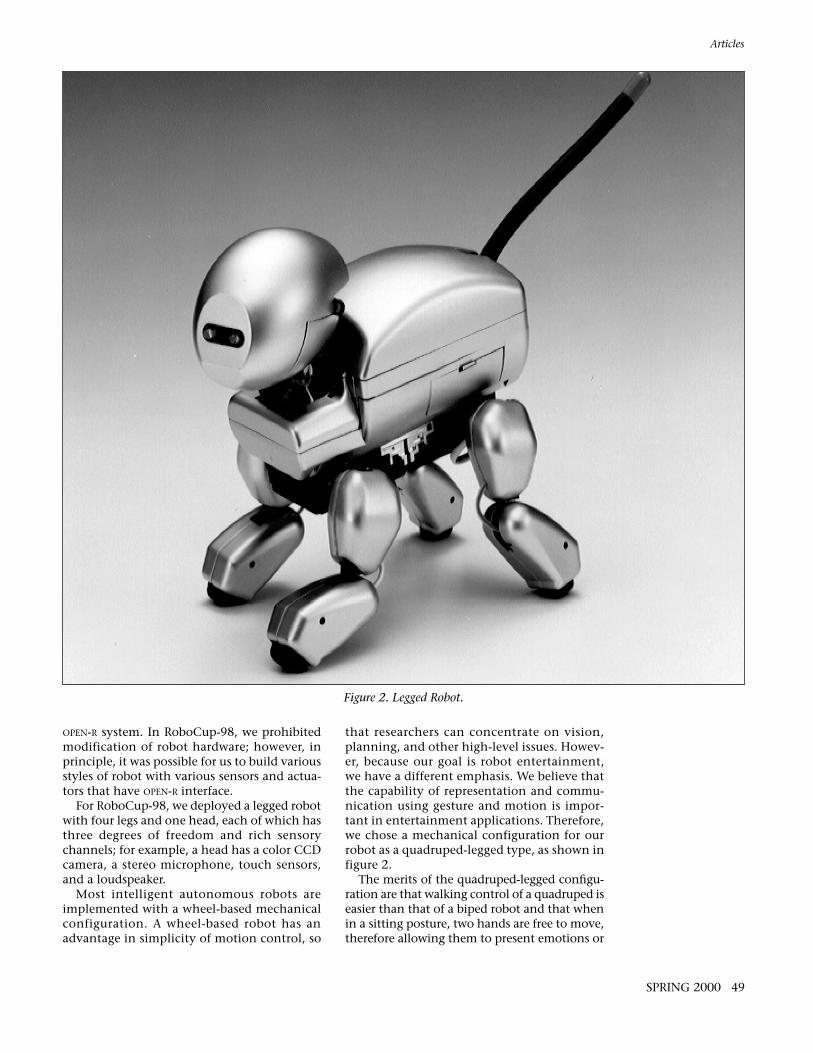
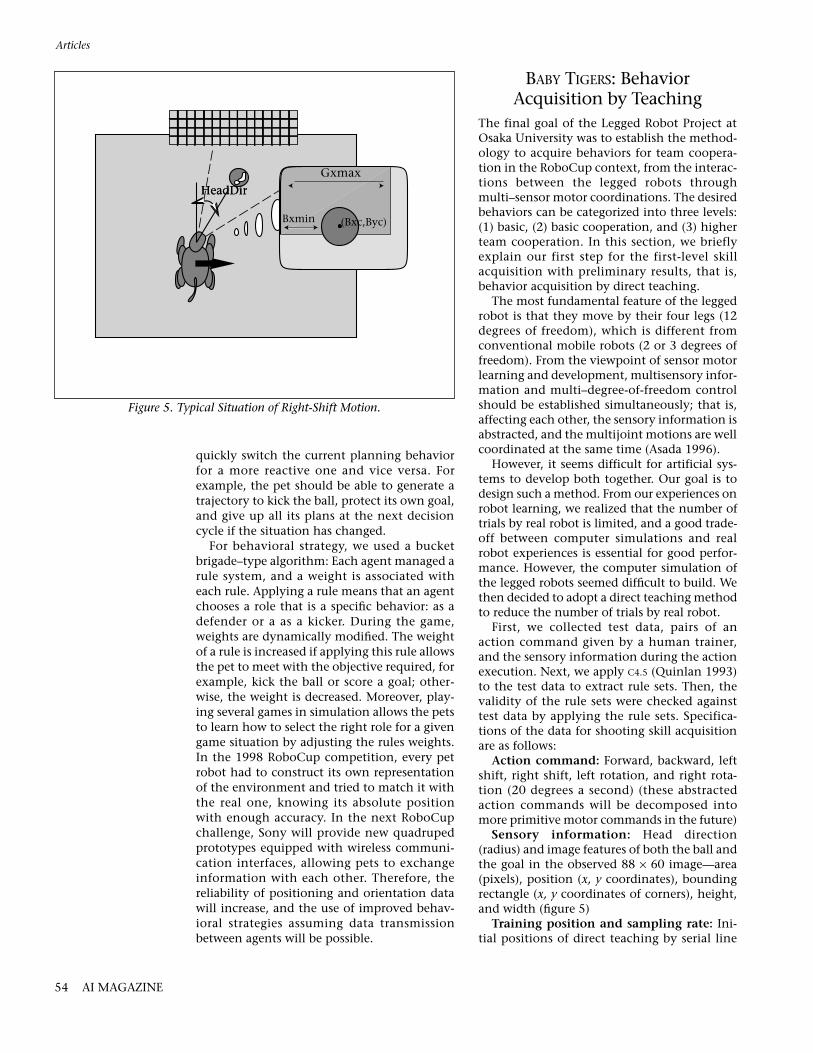
Sensory information: Head direction(radius) and image features of both the ball andthe goal in the observed 88 × 60 image—area(pixels), position (x, y coordinates), boundingrectangle (x, y coordinates of corners), height,and width (figure 5)
Training position and sampling rate: Ini-tial positions of direct teaching by serial line
quickly switch the current planning behaviorfor a more reactive one and vice versa. Forexample, the pet should be able to generate atrajectory to kick the ball, protect its own goal,and give up all its plans at the next decisioncycle if the situation has changed.
For behavioral strategy, we used a bucketbrigade–type algorithm: Each agent managed arule system, and a weight is associated witheach rule. Applying a rule means that an agentchooses a role that is a specific behavior: as adefender or a as a kicker. During the game,weights are dynamically modified. The weightof a rule is increased if applying this rule allowsthe pet to meet with the objective required, forexample, kick the ball or score a goal; other-wise, the weight is decreased. Moreover, play-ing several games in simulation allows the petsto learn how to select the right role for a givengame situation by adjusting the rules weights.In the 1998 RoboCup competition, every petrobot had to construct its own representationof the environment and tried to match it withthe real one, knowing its absolute positionwith enough accuracy. In the next RoboCupchallenge, Sony will provide new quadrupedprototypes equipped with wireless communi-cation interfaces, allowing pets to exchangeinformation with each other. Therefore, thereliability of positioning and orientation datawill increase, and the use of improved behav-ioral strategies assuming data transmissionbetween agents will be possible.
Articles
54 AI MAGAZINE
Gxmax
(Bxc,Byc)
HeadDirHeadDir
Bxmin
Figure 5. Typical Situation of Right-Shift Motion.

connection evenly distributed in thefield heading the goal; the samplingrate, 300 microseconds (one trial fromthe initial position to the goal takesabout 10 seconds)
We have collected about 740 pairsof action command and sensory infor-mation for training data to make rulesets and 500 pairs for test data to checkthe validity of the rule sets. Both setsof data are obtained in the same man-ner starting from similar initial posi-tions, but individual pairs are differentfrom each other trial by trial.
The number of rules obtained isabout 30, and typical ones for forward(F), left rotation (LR), and right shift(RS) are as follows:
Forward: BallArea > 56, –0:14 ⇐HeadDir < 0:37, GoalXmin ⇐ 11
Left-Rotation: BallArea > 49, 0:52 <HeadDir ⇐ 1:10, BallWidth ⇐ 11
Right-Shift: BallArea ⇐ 40, BallYcen > 8, BallXmin > 3, HeadDir ⇐–0:24, GoalArea ⇐ 665, GoalXmax ⇐64Figure 5 shows the typical situation ofright-shift motion.
Because of the inaccurate teachingby the human trainer (actually, thehuman trainer is not experienced yetto do this sort of teaching), the learn-ing algorithm is not completely reli-able yet. Table 1 indicates a confusionmatrix, showing where some misclas-sification of the training cases occurs.
Note that several misclassificationsare shown (in particular, LEFT_TURNdoes not have any correct classifica-tions). We are planning to improve theteaching skills and also use more train-ing data to construct robust classifica-tion. Generalization is one of the bigissues of direct teaching, and explana-tion-based learning seems one alterna-tive for solving the problem. Thesegeneralization techniques are underinvestigation.
ConclusionIn this article, we reported on some ofour work using the Sony quadrupedlegged robots to play robotic soccer. Webriefly described the components ofSony’s legged robots. We then presentedour vision-based navigation, Bayesianlocalization, role-based behaviors, andbehavior acquisition by teaching.
In RoboCup-98, the research groupsfrom CMU, LRP, and Osaka Universityplayed soccer, competing against eachother by implementing what theyhave developed on the commonlegged robot platform. However, win-ning the games should not be our firstpriority. The real purpose of RoboCupis to advance and promote researchand development of autonomousrobots all together by setting a com-mon target and goal as a standardproblem, not to work on discrete inter-ests. In the future, by taking advantageof the merit in the Sony Legged RobotLeague of the common platform, wehope to integrate or compare variousalgorithms and outcomes from allresearch groups.
Notes1. See Kitano et al. (1997) and www. robo-cup.org/RoboCup/RoboCup. html for addi-tional information.
2. This tool was developed by Kwun Han,for which we thank him.
ReferencesAsada, M. 1996. An Agent and an Environ-ment: A View on Having Bodies—A CaseStudy on Behavior Learning for Vision-Based Mobile Robot. In Proceedings of the1996 IROS Workshop on toward RealAutonomy, 19–24. Washington, D.C.: Insti-tute of Electrical and Electronics Engineers.
Asada, M.; Kuniyoshi, Y.; Drogoul, A.;Asama, H.; Mataric, M.; Duhaut, D.; Stone,P.; and Kitano, H. 1998. The RoboCupPhysical Agent Challenge: Phase-I. AppliedArtificial Intelligence 12(2–3): 251–263.
Bonnin, P.; Hoeltzener, B.; and Pissaloux, E.1995. A New Way of Image Data Fusion:The Multi-Spectral Cooperative Image Seg-mentation. In Proceedings of the IEEEInternational Conference on Image Pro-
Articles
SPRING 2000 55
a b c d e f ← classified as
111 13 3 — 4 — (a): LEFT
14 — — 2 9 — (b): LEFT_TURN
— — 8 16 9 — (c): RIGHT_TURN
— — 20 151 34 — (d): RIGHT
1 — 3 13 91 — (e): FORWARD
— — — — — — (f): BACK
Table 1. Confusion Matrix.
cessing (ICIP 95), 572–575. Washington,D.C.: IEEE Computer Society.
Burgard, W.; Cremers, A. B.; Fox, D.;Haehnel, D.; Lakemeyer, G.; Schulz, D.;Steiner, W.; and Thrun, S. 1998. The Inter-active Museum Tour-Guide Robot. In Pro-ceedings of the Fifteenth National Confer-ence on Artificial Intelligence, 11–18.Menlo Park, Calif.: American Associationfor Artificial Intelligence.
Elfes, A. 1989. Occupancy Grids: A Proba-bilistic Framework for Robot Perceptionand Navigation. Ph.D. dissertation,Department of Electrical and ComputerEngineering, Carnegie Mellon University.
Fujita, M., and Kageyama, K. 1997. AnOpen Architecture for Robot Entertain-ment. Paper presented at the First Interna-tional Conference on Autonomous Agents,5–8 February, Los Angeles, California.
Fujita, M., and Kitano, H. 1998. Develop-ment of an Autonomous Quadruped Robotfor Robot Entertainment. AutonomousRobots 5(1): 7–18.
Fujita, M.; Kitano, H.; and Kageyama, K.1998. Reconfigurable Physical Agent. Paperpresented at the Second InternationalConference on Autonomous Agents, 10–13May, Minneapolis, Minnesota.
Kitano, H.; Fujita, M.; Zrehen, S.; andKageyama, K. 1998. Sony Legged Robot forRoboCup Challenge. In Proceedings of the1998 IEEE International Conference onRobotics and Automotion, 2605–2612.Washington, D.C.: IEEE Computer Society.
Kitano, H.; Tambe, M.; Stone, P.; Veloso, M.;Coradeschi, S.; Osawa, E.; Matsubara, E.;Noda, I.; and Asada, M. 1997. The RoboCupSynthetic Agent Challenge 97. In Proceed-ings of the Fifteenth International JointConference on Artificial Intelligence,24–29. Menlo Park, Calif.: InternationalJoint Conferences on Artificial Intelligence.
McGhee, R. B. 1968. Some Finite-StateAspects of Legged Locomotion. Mathemat-ical Biosciences 2:67–84.

University, Tokyo, and aPh.D. in computer sci-ence from Kyoto Univer-sity. Since 1988, he hasbeen a visiting researcherat the Center forMachine Translation atCarnegie Mellon Univer-sity. Kitano received the
Computers and Thought Award from theInternational Joint Conferences onArtificial Intelligence in 1993. His researchinterests include RoboCup, computationalmolecular biology, engineering use of themophogenesis process, and evolutionarysystems.
Vincent Hugel graduated in 1994 from theEcole des Mines de Nancy, one of the lead-ing French engineering schools. Hereceived his specialization degree in robot-ics at the National Institute of Nuclear Sci-ence and Technology, France, in 1995. Hehas been involved in the design and imple-mentation of walking algorithms on hexa-pods and quadrupeds. This work was partof his Ph.D. thesis, which he received in1999. His e-mail address is [email protected].
Patrick Bonnin received his Aggregationof Applied Physics in 1985, a Master in1986 in remote sensing from Paris VII Uni-versity, and a Ph.D. in image processing in1991 from Paris VII University. He has beenan assistant professor since 1992 at ParisNord University IUT de Villetaneuse. From1985 to 1996, he worked at the FrenchDefense Laboratory in the field of imageprocessing, data fusion, and parallel pro-cessing. He joined the Laboratoire de Robo-tique de Paris in 1998. His current researchinterests are a real-time vision system forrobotics, segmentation of color images,and stereoscopic vision. His e-mail addressis [email protected].
Jean-Christophe Bouramoué is currentlyworking as an AI engineer for a French soft-ware company. He received his Master in AIin 1998 (D.E.A I.A.R.F.A - Paris VI). Hisdomains of interest are object-orienteddesign and modeling, human-machineinterface design, and multiagent systems.
Pierre Blazevic received his Aggregation ofApplied Physics in 1985, a Master in robot-ics in 1986, and a Ph.D. from Paris VI Uni-versity in 1991. He has been an assistantprofessor at Versailles University since1992. He has been with the Laboratoire deRobotique de Paris since its creation in1987. His current research interests arewheeled and legged locomotion and forcefeedback devices for teleoperation. His e-mail address is [email protected].
uncertain, dynamic, and adversarial envi-ronments. Veloso has developed teams ofrobotic soccer agents in three differentleagues that are RoboCup world champi-ons: simulation (1998), CMU-built small-wheeled robots (1997 and 1998), and Sonyfour-legged dog robots (1998). Veloso wasawarded a National Science FoundationCareer Award in 1995 and the Allen NewellMedal for Excellence in Research in 1997.Her e-mail address is [email protected].
William Uther is a doctoral student incomputer science at Carnegie Mellon Uni-versity. He received his B.Sc. with honors incomputer sciences from the University ofSydney in 1994. Uther, who implementedthe CMTRIO RoboCup-98 team, is currentlyinvestigating how to use reinforcementlearning for agent control and how to auto-matically decompose problem spaces basedon experience. His e-mail address [email protected].
Minoru Asada receiveda B.E., an M.Sc., and aPh.D. in control engi-neering from Osaka Uni-versity, Osaka, Japan, in1977, 1979, and 1982,respectively. From 1982to 1988, he was aresearch associate of con-
trol engineering, Osaka University, Toyon-aka, Osaka. In April 1989, he became anassociate professor of mechanical engineer-ing for computer-controlled machinery,Osaka University, Suita, Osaka. In April1995, he became a professor in the samedepartment. Since April 1997, he has beena professor in the Department of AdaptiveMachine Systems at the same university.From August 1986 to October 1987, he wasa visiting researcher at the Center forAutomation Research, University of Mary-land. He received the 1992 Best PaperAward at the Institute for Electrical andElectronics Engineers (IEEE)/Robotics Soci-ety of Japan (RSJ) International Conferenceon Intelligent Robots and Systems (IROS92)and the 1996 Best Paper Award from theRSJ. He was a general chair of the IEEE/RSJ1996 International Conference on Intelli-gent Robots and Systems (IROS96). Sinceearly 1990, he has been involved inRoboCup activities. His team was the firstchampion team, with the University ofSouthern California, in the middle-sizeleague at the first RoboCup. His e-mailaddress is [email protected].
Hiroaki Kitano is a senior researcher atSony Computer Science Laboratories, Inc.,and a project director at Kitano SymbioticSystems Project, Japan Science and Tech-nology Corporation. He received a B.A. inphysics from the International Christian
McGhee, R. B., and Frank, A. A. 1968. Onthe Stability Properties of QuadrupedCreeping Gaits. Mathematical Biosciences3:331–351.
Pissaloux, E., and Bonnin, P. 1997. On theEvolution of Parallel Computers Dedicatedto Image Processing through Examples ofFrench Computers. In Digital Signal Process-ing, Volume 7, ed. R. Y. Gadda, 13–27. SanDiego, Calif.: Academic.
Quinlan, J. R. 1993. C4.5: Programs forMachine Learning. Morgan Kaufmann Seriesin Machine Learning. San Francisco, Calif.:Morgan Kaufmann.
Stone, P., and Veloso, M. 1999. TaskDecomposition and Dynamic Role Assign-ment for Real-Time Strategic Teamwork. InIntelligent Agents V—Proceedings of the FifthInternational Workshop on Agent Theories,Architectures, and Languages (ATAL-98), eds.J. P. Müller, M. P. Singh, and A. S. Rao,293–308. Lecture Notes in Artificial Intelli-gence 1555. Heidelberg: Springer-Verlag.
Veloso, M.; Stone, P.; Han, K.; and Achim,S. 1998. CMUNITED: A Team of Robotic Soc-cer Agents Collaborating in an AdversarialEnvironment. In RoboCup-97: The FirstRobot World Cup Soccer Games and Confer-ences, ed. H. Kitano, 242–256. Berlin:Springer Verlag.
Masahiro Fujita is asenior research scientistat Digital Creatures Lab-oratory, Sony Corpora-tion. He received a B.A.in electronics and com-munications from theWaseda University, Tok-yo, in 1981, and an M.S.
in electrical engineering from the Universi-ty of California at Irvine in 1989. Hisresearch interests include modular robotics,agent architecture, visual and audio percep-tion, neural networks, and evolutionarysystems. His e-mail address is [email protected].
Manuela M. Veloso isassociate professor ofcomputer science atCarnegie Mellon Univer-sity (CMU). She receivedher Ph.D. in computerscience from CMU in1992. She received a B.S.in electrical engineering
in 1980 and an M.Sc. in electrical and com-puter engineering in 1984 from the Institu-to Superior Tecnico in Lisbon. Veloso’slong-term research goal is the effective con-struction of teams of intelligent agentswhere cognition, perception, and actionare combined to address planning, execu-tion, and learning tasks, in particular, in
Articles
56 AI MAGAZINE