Visibility-Consistent Thin Surface Reconstruction Using
Multi-ScaleKernels ś Supplemental Material
SAMIR AROUDJ, PATRICK SEEMANN, FABIAN LANGGUTH,STEFAN GUTHE, and
MICHAEL GOESELE, TU Darmstadt, Germany
ACM Reference Format:
Samir Aroudj, Patrick Seemann, Fabian Langguth, Stefan Guthe,
and Michael
Goesele. 2017. Visibility-Consistent Thin Surface Reconstruction
UsingMulti-
Scale Kernels ś Supplemental Material. ACM Trans. Graph. 36, 6,
Article 187
ś Supplemental Material (November 2017), 3 pages.
https://doi.org/10.1145/nnnnnnn.nnnnnnn
This supplemental material demonstrates results not shown in
the
main paper. We compare our TSR approach against Poisson
Surface
Reconstruction (PSR) [Kazhdan and Hoppe 2013], Floating
Scale
Surface Reconstruction (FSSR) [Fuhrmann and Goesele 2014],
Point
Fusion (PFS) [Ummenhofer and Brox 2015], Smooth Signed
Distance
Surface Reconstruction (SSD) [Calakli and Taubin 2011], Surface
Re-
construction from Multi-resolution Points (SURFMRS) [Mücke et
al.
2011] and CMPMVS [Jancosek and Pajdla 2011]. Note that we
never
cull back faces. Additionally, back faces of colorless
reconstructions
are rendered in yellow. All datasets are described in the main
paper.
REFERENCESFatih Calakli and Gabriel Taubin. 2011. SSD: Smooth
Signed Distance Surface Recon-
struction. CGF 30, 7 (2011).Simon Fuhrmann and Michael Goesele.
2014. Floating Scale Surface Reconstruction.
ACM TOG 33, 4 (2014).Michal Jancosek and Tomás Pajdla. 2011.
Multi-View Reconstruction PreservingWeakly-
Supported Surfaces. In CVPR.Michael Kazhdan and Hugues Hoppe.
2013. Screened Poisson Surface Reconstruction.
ACM TOG 32, 3 (2013).Patrick Mücke, Ronny Klowsky, and Michael
Goesele. 2011. Surface Reconstruction
from Multi-resolution Sample Points. In VMV.Benjamin Ummenhofer
and Thomas Brox. 2015. Global, Dense Multiscale Reconstruc-
tion for a Billion Points. In ICCV.
Received May 2017; revised August 2017; final version September
2017;
accepted September 2017
© 2017 Association for Computing Machinery.This is the author’s
version of the work. It is posted here for your personal use. Not
forredistribution. The definitive Version of Record was published
in ACM Transactions onGraphics,
https://doi.org/10.1145/nnnnnnn.nnnnnnn.
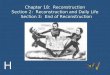
(a) Ground Truth (b) FSSR (c) PFS (d) SSD
(e) CMPMVS (f) SURFMRS (g) PSR (h) TSR
-10 10
Fig. 1. For the City scene, our approach is the only one that
accurately
reconstructs it.
ACM Transactions on Graphics, Vol. 36, No. 6, Article 187 ś
Supplemental Material. Publication date: November 2017.
https://doi.org/10.1145/nnnnnnn.nnnnnnnhttps://doi.org/10.1145/nnnnnnn.nnnnnnn
187 ś Supplemental Material:2 • Aroudj, S. et al
(a) Image (b) Points (c) FSSR (d) PFS (e) PSR (f) SSD (g) CMPMVS
(h) TSR
Fig. 2. Shelltower front side views comparison. There is a clear
trade-off between well supported thin structures not being
reconstructed (FSSR and CMPMVS)
vs. hallucinated geometry (PFS, PSR and SSD). Only TSR
reconstructs thin structures without adding hallucinated
geometry.
(a) Image (b) Points (c) FSSR (d) PFS (e) PSR (f) SSD (g) CMPMVS
(h) TSR
Fig. 3. Shell closeups from Fig. 2. TSR is the only one
reconstructing it without holes (CMPMVS) or hallucinated geometry
(FSSR, PFS, PSR, SSD).
(a) Image (b) Points (c) PFS (d) PSR (e) SSD (f) FSSR (g) CMPMVS
(h) TSR
Fig. 4. Orchid comparison. The top row shows the front with
vertex colors while the bottom row shows the back without vertex
colors. The renderings with
colors emphasize the quality of the TSR reconstruction compared
to all other results, especially when looking at the leaves towards
the bottom of the plant.
ACM Transactions on Graphics, Vol. 36, No. 6, Article 187 ś
Supplemental Material. Publication date: November 2017.
Visibility-Consistent Thin Surface Reconstruction Using
Multi-Scale Kernels ś Supplemental Material • 187 ś Supplemental
Material:3
σ = 0.05 σ = 0.1 σ = 0.15 σ = 0.2 σ = 0.25 σ = 0.3 σ = 0.35
Fig. 5. Robustness experiment using input point clouds (top) of
the synthetic wedge with varying noise and corresponding TSR
reconstructions (bottom).
Point clouds were generated with increasing noise (√d · N(0, σ
)) using ray traced depth maps of the wedge.
Noise-free
Noisy(σ=0.05)
Points Crust i = 1 i = 2 i = 3 i = 4 i = 10
Fig. 6. Progress for the synthetic wedge (expanded version of
Fig. 5 in the main paper). Note that the refinement quickly reduces
surface errors. Sharp features
become more accurate with each iteration. However, their quality
improves slower than the quality of other surface parts.
ACM Transactions on Graphics, Vol. 36, No. 6, Article 187 ś
Supplemental Material. Publication date: November 2017.
References


![Neural Volumes: Learning Dynamic Renderable …...2014], and are often aimed at either image generation [Buehler et al. 2001; Kalantari et al. 2016] or 3D reconstruction [Goesele et](https://img.pdfslide.us/doc/110x75/5ec5fc934f8ce2596d27b27c/neural-volumes-learning-dynamic-renderable-2014-and-are-often-aimed-at-either.jpg)


![ScaleupAlps Presentation [Sola lettura]€¦ · Dr. Tina Gruber-Mücke & Sophie Koschitz Webinar AGENDA 15 – 30 – 15 Structure • 16.00 – 16.15: Introduction • 16.15 –](https://img.pdfslide.us/doc/110x75/605502e377dd2b03c03ffcf7/scaleupalps-presentation-sola-lettura-dr-tina-gruber-mcke-sophie-koschitz.jpg)