Embed Size (px)
Citation preview

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
PENICILLIN PRODUCTION CONTROL BY MONITORING
CONCENTRATION PROFILES OF THE PROCESS
M. C. Fernández, M. N. Pantano, S. Rómoli, D. Patiño, O. Ortiz and G. Scaglia.
Instituto de Ingeniería Química - Facultad de Ingeniería
(Universidad Nacional de San Juan)
Av. Libertador San Martín 1109 (O). San Juan. Argentina
Abstract. The objective of this work is to design a controller for process
variables for the penicillin production, carried out in a fed-batch reactor,
following predefined profiles. The design technique is based on linear
algebra, which allows the design of multivariable controllers and highly
nonlinear systems.
To achieve this, it is necessary to possess a mathematical model that
adequately represents the process and the concentration profiles that system
should follow. Simulation results are shown for different initial conditions.
Key words: controller design, nonlinear systems, fed-batch process.
1. Introduction.
The Penicillin is an antibiotic discovered by Alexander Fleming in 1928, this
discovery is known as the biggest revolution in medicine and public health in human
history (Biomed, 1999), because it allowed and still allows saving millions of lifes
around the world.
Although penicillin can be chemically synthesized since 1957, it is commonly
produced by microorganisms. To be more specific, only a few fungal species can
produce it, such as Penicillum crysogenum and Aspergillus nidulans (A. Herr, R.
Fischer, 2014).
The penicillin production as many other processes, like those to obtain primary and
secondary metabolites, proteins, and biopolymers (J. Lee, et al., 1999), can be carried
out in a fed-batch way. This consists in change substrate feed rate along the process and
not remove product until it ends (A. Survey, A. Johnson, 1987). Fermentations like that

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
have many difficulties to be controlled, this is because the complex dynamic behavior of
microorganisms, nonlinear and sometimes unstable dynamics, external disturbances,
strong modeling approximations, unusual on-line measurements of most representative
variables, etc. All these conditions avoid the possibility to use classic industrial
controllers, being necessary to implement control algorithms specifically developed for
bioprocesses (H. De Battistaa, et al., 2012).
The substrate feed rate control profile for penicillin biosynthesis has been obtained in
different ways: analytically (H. C. Lim, et al., 1986), dynamic programming (R. Luus,
1993), by an evolutionary approach (M. Ronen, et al., 2002) and using orthogonal
collocation (C. A. M. Riascos, José M. Pinto, 2004). In this article, we propose an easy
form of tracking the optimal concentration profiles, in order to obtain the substrate feed
rate policy of the process. To achieve this goal, is important to have the next
information: the mathematical model that represents the process properly and the
concentration profiles that we want the system to follow.
First of all, the technique requires knowing the reference profiles, so that is the first
step to take; ones profiles are determined, the next stage is to compute the control action
causing the system to follow the references. The controller structure in this
methodology arises from the mathematical model of the process; that means that this
procedure can be used in many nonlinear systems, making it a very useful technique for
any bioprocess.
The paper is organized in four sections. The second one describes the bioreactor and
the mathematical model of the process. The third part explains the controller design.
The simulations that prove the effectiveness of the controller are developed in the last
section. Finally, conclusions are exposed.
2. Characteristics of the system and process.
A fed-batch bioreactor is used to produce penicillin from glucose. The system was
explained for the first time in (J. E. Cuthrell, L. T. Biegler, 1989), and many works were
done from it, obtaining with different methods the optimal feed rate profile (H. C. Lim,
et al., 1986), (R. Luus, 1993), (M. Ronen, et al., 2002) and (C. A. M. Riascos, José M.

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
Pinto, 2004). The mathematical model (C. A. M. Riascos, José M. Pinto, 2004) that
represents the process is:
(1)
(2)
The state variables in the equations shown are: volume (V), concentrations
of biomass (X), product (P), and substrate (S), substrate feed rate (U) (that will be the
control variable). In the dynamic model, SF is the feed concentration, ( ) is the
specific biomass growth rate, ( ) is the specific penicillin production rate. Initial
variable values are shown in Table 1, whereas parameter definitions and values are in
Table 2.
Table 1. Initial variable values for penicillin biosynthesis
Variable Initial value
X (g/L) 1.5
P (g/L) 0.0
S (g/L) 0.0
V (L) 7.0
Table 2. Parameters of penicillin biosynthesis model
Parameter Definition Value
µmax Maximum specific biomass growth rate (h-1
) 0.11
Ρmax Maximum specific production rate (g P/g X h) 0.0055
𝑋 (𝑡) = (𝑋 𝑆)𝑋 − 𝑋
𝑆𝐹𝑉 𝑈
𝑃 (𝑡) = 𝜌(𝑆)𝑋 − 𝐾𝑑𝑒𝑔𝑃 − 𝑃
𝑆𝐹𝑉 𝑈
𝑆 (𝑡) = (𝑋 𝑆) 𝑋
𝑌𝑋/𝑆 − 𝜌(𝑆)
𝑃
𝑌𝑃/𝑆 −
𝑚𝑠𝑆
𝐾𝑚 + 𝑆 𝑋 + 1 −
𝑆
𝑆𝐹 𝑈
𝑉
𝑉 (𝑡) =𝑈
𝑆𝐹
(𝑋 𝑆) = 𝑚𝑎𝑥 𝑆
𝐾𝑋𝑋 + 𝑆
𝜌(𝑆) = 𝜌𝑚𝑎𝑥 𝑆
𝐾𝑃 + 𝑆(1 + 𝑆/𝐾𝑖𝑛)

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
KX Saturation parameter for biomass growth (g S/g X) 0.006
KP Saturation parameter for production (g S/L) 0.0001
Kin Inhibition parameter for production (g S/L) 0.1
Kdeg Product degradation rate (h-1
) 0.001
Km Saturation parameter for maintenance
consumption (g S/L) 0.0001
ms Maintenance consumption rate (g S/g X h) 0.029
YX/S Yield factor for substrate to biomass (g X/g S) 0.47
YP/S Yield factor for substrate to product (g P/g S) 1.2
SF Feed concentration (g S/L) 500
3. Controller design.
As it was mentioned before, the penicillin production process was studied by various
authors ((H. C. Lim, et al., 1986), (R. Luus, 1993), (M. Ronen, et al., 2002) and (C. A.
M. Riascos, J. M. Pinto, 2004)). In those works, were determined the substrate feed rate
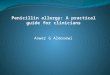
that makes upper the final product concentration. For this paper, it was taken as
reference (R. Luus, 1993). Fig. 1 shows the optimal reference profiles.
Fig 1. Reference Profiles.
In order to follow the references shown in Fig. 1, the technique is explained and
developed below.
0 20 40 60 80 100 120 1400
5
10
15
20
25
30
35
Time[hs.]
Concentr
ation[g
/L]
///
Volu
me [
L]
Cell
Product
Substrate
Volume
Fig. 1 Reference Profiles.

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
3.1. Problem definition.
Assuming the following first-order differential equation:
= = ( ) (3)
Considering that ( ) = , where x is the system output, t the time and u the
control action. From here on, ( ) is the value of x at a discrete time (t=nT0), being T0
the sample time, and x(n+1) is x value in the next instant of time (n = 1, 2, …). To
obtain ( + 1) is necessary to integrate the last equation over the time interval
( + 1) , as it is shown next:
( + 1) = ( ) + ∫ ( ) ( )
(4)
It is supposed that u does not change it value in the integration interval.
There are many numerical methods used for approximate integrals, in this paper it
will apply Euler, despite of it is not the most accurate way, because there are methods
like Runge Kutta where the results are exacter, however the mathematical complexity
also increases.
( + 1) ( ) + ( ( ) ( ) ( )) (5)
With the numerical methods it can be calculated the system state at the time n+1 as a
function of the state, the variables at the time n and the control action.
The technique consist in obtain the profiles of some state variables (sacrificed)
making the tracking error tends to zero. To achieve this, the systems equations are
analyzed under the condition that they have exact solution. In this work, the substrate
concentration profile inside the reactor is the sacrificed variable, and the substrate feed
rate (U) is the control action. It is important to highlight that this methodology has been
employed in many systems with excellent results, such as: (G. Scaglia, et al., 2009), (A.
Rosales, et al., 2009), (G. Scaglia, et al., 2010), (A. Rosales, et al., 2011), (M. Serrano,
et al., 2013), (F. A. Cheein, G. Scaglia, 2013) and (S. Rómoli, et al., 2015).

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
3.2. Controller.
In previous paragraphs it was detailed the mathematical model needed to estimate the
control action used to obtain the state variable profiles of Fig. 1. Now it is developed the
design of a controller whose function is to generate that control action; here it is taken
into account that the bioreactor state variables (cell and product concentrations) follow
the references shown in Fig. 1.
Applying Euler to the equations system (1) saw in section 2.:
(6)
Where and can be obtained as follow:
(7)
The difference between the real and the reference values of the state variables is
called “tracking error”. And it is calculated as follow:
2 2
( ) ( ) ( )n refn n refn ne X X P P
(8)
𝑋𝑛 = 𝑋𝑛 + 𝑇 𝑚𝑎𝑥 𝑆𝑛
𝐾𝑋𝑋𝑛 + 𝑆𝑛 𝑋𝑛 −
𝑋𝑛𝑆𝐹𝑉𝑛
𝑈𝑛
𝑃𝑛 = 𝑃𝑛 + 𝑇 𝜌𝑚𝑎𝑥 𝑆𝑛
𝐾𝑃 + 𝑆𝑛(1 + 𝑆𝑛/𝐾𝑖𝑛) 𝑋𝑛 − 𝐾𝑑𝑒𝑔𝑃𝑛 −
𝑃𝑛𝑆𝐹𝑉𝑛
𝑈𝑛
𝑆𝑛 = 𝑆𝑛 + 𝑇 𝑚𝑎𝑥 𝑆𝑛
𝐾𝑋𝑋𝑛 + 𝑆𝑛
𝑋𝑛𝑌𝑋/𝑆
− 𝜌𝑚𝑎𝑥 𝑆𝑛
𝐾𝑃 + 𝑆𝑛(1 + 𝑆𝑛/𝐾𝑖𝑛)
𝑃𝑛𝑌𝑃/𝑆
− 𝑚𝑠𝑆𝑠
𝐾𝑚 + 𝑆𝑛 𝑋𝑛
+ 1 −𝑆𝑛𝑆𝐹 𝑈𝑛𝑉𝑛
𝑉𝑛 = 𝑉𝑛 + 𝑇 𝑈𝑛𝑆𝑓
𝑋𝑛 = 𝑋𝑟𝑒𝑓 𝑛 + 𝑘 𝑋𝑟𝑒𝑓 𝑛 − 𝑋𝑛 − 𝑋𝑛
𝑃𝑛 = 𝑝𝑟𝑒𝑓 𝑛 + 𝑘2 𝑃𝑟𝑒𝑓 𝑛 − 𝑃𝑛 − 𝑃𝑛
𝑆𝑛 = 𝑆𝑟𝑒𝑓 𝑛 + 𝑘3 𝑆𝑟𝑒𝑓 𝑛 − 𝑆𝑛 − 𝑆𝑛
𝑉𝑛 = 𝑉𝑟𝑒𝑓 𝑛 + 𝑘4 𝑉𝑟𝑒𝑓 𝑛 − 𝑉𝑛 − 𝑉𝑛

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
The controller parameters ( 2 3 4) take values among zero and one
( 1 ) for i = 1; 2; 3; 4, that makes possible the tracking error to tend to zero
when n tends to infinity. Seeing equations (7) it can be conclude that when k = 0, the
real profile reaches the reference in one step, and when k is between 0 and 1, the error
approaches zero gradually.
Therefore, the state variable in the sample time n+1 can be calculated as a function
of the real value of the variable in the time n, the reference profiles and the controller
parameters.
Equations system (6) can be expressed as a matrix with the form of:
A U = b (9)
That is to say:
(10)
Taking into account what it was expressed in (7):
(11)
−𝑋𝑛−𝑃𝑛
𝑆𝑓 − 𝑆𝑛1
𝑈𝑛
=
(𝑋𝑛 − 𝑋𝑛)
𝑇 𝑆𝑓𝑉𝑛 − (𝑋𝑛 𝑆𝑛)𝑋𝑛𝑆𝑓𝑉𝑛
(𝑃𝑛 − 𝑃𝑛)
𝑇 𝑆𝑓𝑉𝑛 − 𝜌(𝑆𝑛)𝑋𝑛𝑆𝑓𝑉𝑛 + 𝐾𝑑𝑒𝑔𝑃𝑛𝑆𝑓𝑉𝑛
(𝑆𝑛 − 𝑆𝑛)
𝑇 𝑆𝑓𝑉𝑛 + (𝑋𝑛 𝑆𝑛)
𝑋𝑛𝑌𝑋/𝑆
𝑆𝑓𝑉𝑛 + 𝜌(𝑆𝑛) 𝑋𝑛𝑌𝑃/𝑆
𝑆𝑓𝑉𝑛 + 𝑚𝑠𝑆𝑛
𝐾𝑚 + 𝑆𝑛 𝑋𝑛𝑆𝑓𝑉𝑛
(𝑉𝑛 − 𝑉𝑛)
𝑇 𝑆𝑓
−𝑋𝑛−𝑃𝑛
𝑆𝑓 − 𝑆𝑛1
𝑈𝑛
=
𝑋𝑟𝑒𝑓 𝑛 − 𝑘 𝑋𝑟𝑒𝑓 𝑛 − 𝑋𝑛 − 𝑋𝑛
𝑇 𝑆𝑓𝑉𝑛 − 𝑚𝑎𝑥
𝑆𝑛𝐾𝑋𝑋𝑛 + 𝑆𝑛
𝑋𝑛𝑆𝑓𝑉𝑛
𝑃𝑟𝑒𝑓 𝑛 − 𝑘2 𝑃𝑟𝑒𝑓 𝑛 − 𝑃𝑛 − 𝑃𝑛
𝑇 𝑆𝑓𝑉𝑛 − 𝜌𝑚𝑎𝑥
𝑆𝑛
𝐾𝑃 + 𝑆𝑛 1 +𝑆𝑛𝐾𝑖𝑛 𝑋𝑛𝑆𝑓𝑉𝑛 + 𝐾𝑑𝑒𝑔𝑃𝑛𝑆𝑓𝑉𝑛
𝑆𝑟𝑒𝑓 𝑛 − 𝑘3 𝑆𝑟𝑒𝑓 𝑛 − 𝑆𝑛 − 𝑆𝑛
𝑇 𝑆𝑓𝑉𝑛 + 𝑚𝑎𝑥
𝑆𝑛𝐾𝑋𝑋𝑛 + 𝑆𝑛
𝑋𝑛𝑌𝑋/𝑆
𝑆𝑓𝑉𝑛 + 𝜌𝑚𝑎𝑥 𝑆𝑛
𝐾𝑃 + 𝑆𝑛 1 +𝑆𝑛𝐾𝑖𝑛
𝑋𝑛𝑌𝑃/𝑆
𝑆𝑓𝑉𝑛 + 𝑚𝑠𝑆𝑛
𝐾𝑚 + 𝑆𝑛 𝑋𝑛𝑆𝑓𝑉𝑛
𝑉𝑟𝑒𝑓 𝑛 − 𝑘4 𝑉𝑟𝑒𝑓 𝑛 − 𝑉𝑛 − 𝑉𝑛
𝑇 𝑆𝑓

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
As the volume is a variable that is present in all the equations, the last components of
the matrices A and b are redundant, so they can be neglected.
(12)
From (12) it is possible to obtain the control action (Un) at any sample time, knowing
that this is the value found by following the optimal trajectories. For this equations
system the parameters of the process and the reference profiles are presented in section
2.
To begin with the resolution of (12), it is important to establish the conditions
necessary for the system to has exact solution. For this to be fulfilled, looking equation
(9) it can be deduced that b have to be a linear combination of A columns. There are
several ways to make the system satisfy that condition, one of them is that both A and b
have to be parallel. In this paper that condition of parallelism will be expressed in (13),
for more information see (G. Strang, 2006).
(13)
In (13) is shown an equations system where am and bm (m = 1, 2, 3) are the
components of matrixes A and b, respectively. To solve the system there were used the
next expressions:
(14)
−𝑋𝑛−𝑃𝑛
𝑆𝑓 − 𝑆𝑛
𝑈𝑛
=
𝑋𝑟𝑒𝑓 𝑛 − 𝑘 𝑋𝑟𝑒𝑓 𝑛 − 𝑋𝑛 − 𝑋𝑛
𝑇 𝑆𝑓𝑉𝑛 − 𝑚𝑎𝑥
𝑆𝑛𝐾𝑋𝑋𝑛 + 𝑆𝑛
𝑋𝑛𝑆𝑓𝑉𝑛
𝑃𝑟𝑒𝑓 𝑛 − 𝑘2 𝑃𝑟𝑒𝑓 𝑛 − 𝑃𝑛 − 𝑃𝑛
𝑇 𝑆𝑓𝑉𝑛 − 𝜌𝑚𝑎𝑥
𝑆𝑛
𝐾𝑃 + 𝑆𝑛 1 +𝑆𝑛𝐾𝑖𝑛 𝑋𝑛𝑆𝑓𝑉𝑛 + 𝐾𝑑𝑒𝑔𝑃𝑛𝑆𝑓𝑉𝑛
𝑆𝑟𝑒𝑓 𝑛 − 𝑘3 𝑆𝑟𝑒𝑓 𝑛 − 𝑆𝑛 − 𝑆𝑛
𝑇 𝑆𝑓𝑉𝑛 + 𝑚𝑎𝑥
𝑆𝑛𝐾𝑋𝑋𝑛 + 𝑆𝑛
𝑋𝑛𝑌𝑋/𝑆
𝑆𝑓𝑉𝑛 + 𝜌𝑚𝑎𝑥 𝑆𝑛
𝐾𝑃 + 𝑆𝑛 1 +𝑆𝑛𝐾𝑖𝑛
𝑋𝑛𝑌𝑃/𝑆
𝑆𝑓𝑉𝑛 + 𝑚𝑠𝑆𝑛
𝐾𝑚 + 𝑆𝑛 𝑋𝑛𝑆𝑓𝑉𝑛
𝑎3𝑎 =𝑏3𝑏
𝑎3𝑎2=𝑏3𝑏2
𝑎3𝑏 = 𝑏3𝑎
𝑎3𝑏2 = 𝑏3𝑎2

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
Replacing by (12) in (14):
(15)
(15)
This is a system with two equations and one unknown, the unknown variable is
called “sacrificed variable”, and it takes any value just to ensure the other variables to
track the references. To select that sacrificed variable is necessary to study and interpret
the system. In this system, analyzing (6), was selected the substrate concentration as
sacrificed variable (Sez), that is because all the other variables depend on it. So, in (15) it
can be replaced S by Sez.
𝑆𝑓 − 𝑆𝑛 𝑋𝑟𝑒𝑓 𝑛 − 𝑘 𝑋𝑟𝑒𝑓 𝑛 − 𝑋𝑛 − 𝑋𝑛
𝑇 𝑆𝑓𝑉𝑛 − 𝑚𝑎𝑥
𝑆𝑛𝐾𝑋𝑋𝑛 + 𝑆𝑛
𝑋𝑛𝑆𝑓𝑉𝑛
=
𝑆𝑟𝑒𝑓 𝑛 − 𝑘3 𝑆𝑟𝑒𝑓 𝑛 − 𝑆𝑛 − 𝑆𝑛
𝑇 𝑆𝑓𝑉𝑛
+ 𝑚𝑎𝑥 𝑆𝑛
𝐾𝑋𝑋𝑛 + 𝑆𝑛
𝑋𝑛𝑌𝑋/𝑆
𝑆𝑓𝑉𝑛
+ 𝜌𝑚𝑎𝑥 𝑆𝑛
𝐾𝑃 + 𝑆𝑛 1 +𝑆𝑛𝐾𝑖𝑛
𝑋𝑛𝑌𝑃/𝑆
𝑆𝑓𝑉𝑛 + 𝑚𝑠𝑆𝑛
𝐾𝑚 + 𝑆𝑛 𝑋𝑛𝑆𝑓𝑉𝑛
(−𝑋𝑛)
𝑆𝑓 − 𝑆𝑛
𝑃𝑟𝑒𝑓 𝑛 − 𝑘2 𝑃𝑟𝑒𝑓 𝑛 − 𝑃𝑛 − 𝑃𝑛
𝑇 𝑆𝑓𝑉𝑛 − 𝜌𝑚𝑎𝑥
𝑆𝑛
𝐾𝑃 + 𝑆𝑛 1 +𝑆𝑛𝐾𝑖𝑛
𝑋𝑛𝑆𝑓𝑉𝑛 + 𝐾𝑑𝑒𝑔𝑃𝑛𝑆𝑓𝑉𝑛
=
𝑆𝑟𝑒𝑓 𝑛 − 𝑘3 𝑆𝑟𝑒𝑓 𝑛 − 𝑆𝑛 − 𝑆𝑛
𝑇 𝑆𝑓𝑉𝑛 + 𝑚𝑎𝑥
𝑆𝑛𝐾𝑋𝑋𝑛 + 𝑆𝑛
𝑋𝑛𝑌𝑋/𝑆
𝑆𝑓𝑉𝑛
+ 𝜌𝑚𝑎𝑥 𝑆𝑛
𝐾𝑃 + 𝑆𝑛 1 +𝑆𝑛𝐾𝑖𝑛
𝑋𝑛𝑌𝑃/𝑆
𝑆𝑓𝑉𝑛 + 𝑚𝑠𝑆𝑛
𝐾𝑚 + 𝑆𝑛 𝑋𝑛𝑆𝑓𝑉𝑛
(−𝑃𝑛)

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
(16)
(16)
In the last expression (16), the subscript n represents the value that comes from the
system to the controller in the generic sample time n; the subscript ref n+1 and ref n
refer to the reference value taken at the time instants n+1 and n, respectively; finally
subscript ez represents the sacrificed variable. As it can be seen, there are two values for
Sez: Sez n+1 and Sez n, where the unknown is Sez n+1, because Sez n was calculated in the
previous sample time. To start the simulation it was considered that Sez n = Sez n+1 as a
first approximation (Euler zero order).
Observing Eq. (9) and (10) it can be seen that A is formed by one column linearly
independent, then using minimal square (G. Strang, 2006), (9) is expressed as:
= ( ) (17)
The control action (U) that makes all the state variables follow the references is
calculated with Eq. (17).
𝑆𝑓 − 𝑆𝑛 𝑋𝑟𝑒𝑓 𝑛 − 𝑘 𝑋𝑟𝑒𝑓 𝑛 − 𝑋𝑛 − 𝑋𝑛
𝑇 𝑆𝑓𝑉𝑛 − 𝑚𝑎𝑥
𝑆𝑒𝑧𝐾𝑋𝑋𝑛 + 𝑆𝑒𝑧
𝑋𝑛𝑆𝑓𝑉𝑛
=
𝑆𝑒𝑧 𝑛 − 𝑘3(𝑆𝑒𝑧 𝑛 − 𝑆𝑛) − 𝑆𝑛
𝑇 𝑆𝑓𝑉𝑛 + 𝑚𝑎𝑥
𝑆𝑛𝐾𝑋𝑋𝑛 + 𝑆𝑛
𝑋𝑛𝑌𝑋/𝑆
𝑆𝑓𝑉𝑛
+ 𝜌𝑚𝑎𝑥 𝑆𝑛
𝐾𝑃 + 𝑆𝑛 1 +𝑆𝑛𝐾𝑖𝑛
𝑋𝑛𝑌𝑃/𝑆
𝑆𝑓𝑉𝑛 + 𝑚𝑠𝑆𝑛
𝐾𝑚 + 𝑆𝑛 𝑋𝑛𝑆𝑓𝑉𝑛
(−𝑋𝑛)
𝑆𝑓 − 𝑆𝑛
𝑃𝑟𝑒𝑓 𝑛 − 𝑘2 𝑃𝑟𝑒𝑓 𝑛 − 𝑃𝑛 − 𝑃𝑛
𝑇 𝑆𝑓𝑉𝑛 − 𝜌𝑚𝑎𝑥
𝑆𝑒𝑧
𝐾𝑃 + 𝑆𝑒𝑧 1 +𝑆𝑒𝑧𝐾𝑖𝑛
𝑋𝑛𝑆𝑓𝑉𝑛 + 𝐾𝑑𝑒𝑔𝑃𝑛𝑆𝑓𝑉𝑛
=
𝑆𝑒𝑧 𝑛 − 𝑘3(𝑆𝑒𝑧 𝑛 − 𝑆𝑛) − 𝑆𝑛
𝑇 𝑆𝑓𝑉𝑛 + 𝑚𝑎𝑥
𝑆𝑛𝐾𝑋𝑋𝑛 + 𝑆𝑛
𝑋𝑛𝑌𝑋/𝑆
𝑆𝑓𝑉𝑛
+ 𝜌𝑚𝑎𝑥 𝑆𝑛
𝐾𝑃 + 𝑆𝑛 1 +𝑆𝑛𝐾𝑖𝑛
𝑋𝑛𝑌𝑃/𝑆
𝑆𝑓𝑉𝑛 + 𝑚𝑠𝑆𝑛
𝐾𝑚 + 𝑆𝑛 𝑋𝑛𝑆𝑓𝑉𝑛
(−𝑃𝑛)

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
The system under study has a single input (U) and multiplies outputs (X, P, S), so is
called a SIMO system. However, this strategy of control can be used without problem
for multi-input and multi-output systems (MIMO). To see some examples, go to (G.
Scaglia, et al., 2009), (M. Serrano, et al., 2013), (F. A. Cheein, G. Scaglia, 2013), and
(G. Scaglia, et al., 2014).
As it was mentioned before, this control method assumes that variables are known,
that is to say that is possible measure them. Nevertheless, it is a current problem that the
instrumental needed to measure the different variables is not always available.
4. Simulation results.
In this section it will be shown the performance of the controller. Moreover, in order
to evaluate the operation of the controller, there were applied different initial conditions
to the cell concentration.
In section 2. were shown the initial variable values and the process parameters of
penicillin biosynthesis model (R. Luus, 1993). To test the controller behavior in normal
conditions, there were used Table 1 and Table 2. The controller parameters are shown in
Table 3.
Table 3. Controller parameters
ki Value
k1 0.85
k2 0.85
k3 0.8
Figure 2 shows the tracking of the real and the references variables.

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
Figure 2: Real and Reference profiles.
Looking Fig. 2 the real profiles reach and follow the references with minimal error,
and this error tends to cero as the process moves forward.
Figure 3 shows the tracking of the cells concentration (X) along the time of the
simulation. In that figure can be seen four traces, the red one represent the reference
(XR), the blue one correspond to the obtained tracking with the same initial conditions
(XS) as the reference, while green and black refer to the tracking with 20% more in
initial cells concentration (XM) and 20% less (XL), respectively.
Fig. 3. Cell Concentration.
0 20 40 60 80 100 120 1400
5
10
15
20
25
30
35
Time[hs.]
Co
nce
ntr
atio
n[g
/L]
///
Vo
lum
e [L
]
Cell Reference
Cells
Product Reference
Product
Substrate Reference
Substrate
Volume Reference
Volume
0 5 10 15 20 25 30 350
5
10
15
20
25
30
35
Cells Concentration
Time[hs.]
Co
nce
ntr
atio
n[g
/L]
XR
XS
XM
XL
Fig. 2 Cells Concentration

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
Looking Figure 3 it can be concluded that whatever the initial conditions are, the
controller reaches and remains the reference perfectly, making the errors tend to zero,
and proving the excellent performance that it has.
Conclusion.
This work presents a new control technique based on linear algebra. With this
procedure can be designed multivariable controllers and highly nonlinear systems, such
as those of biotechnological processes, between others. Moreover, the controller
designed has many advantages: this technique has less mathematically complexity than
many others; it can be applied in a grate variety of systems and is versatile against
different changes and disturbances in the process and the system.
As it is shown in the simulation section, giving different initial conditions to the cell
concentration, the controller manages to achieve the reference profile successfully, and
that proves its good performance.
Acknowledgements.
A gratefully recognize to the National Council of Scientific and Technological
Research (CONICET) for funding this project, and for the Institute of Chemical
Engineering (IIQ) of the National University of San Juan (UNSJ) for their continued
collaboration.
References.
A. Herr, R. Fischer, “Improvement of Aspergillus nidulans penicillin production by targeting AcvA to
peroxisomes”, Metabolic Engineering, Volume 25, pp. 131–139, September 2014.
A. Rosales, G. J. E. Scaglia, V. Mut and F. Di Sciascio, “Formation control and trajectory tracking of mobile
robotic systems – a Linear Algebra approach”, Robotica, vol. 29, pp. 335-349, 2011.
A. Rosales, G. Scaglia, V. Mut and F. Di Sciascio, “Trajectory tracking of mobile robots in dynamic
environments a linear algebra approach”, Robotica, vol. 27, pp. 981–997, 2009.
A. Survey, A. Johnson, "The Control of Fed-batch Fermentation Processes ", Automatica, vol. 23, Issue 6, pp.
691–705, November 1987.
Br. J. Biomed, “The true history of the discovery of penicillin, with refuttion of hte misinformation in the
literature”, Sci., pp. 83–93, 1999.
C. A. M. Riascos, J. M. Pinto. “Optimal control of bioreactors: a simultaneous approach for complex systems”,
Chemical Engineering Journal, pp. 23-24, 2004.
F. Auat Cheein, G. Scaglia, “Trajectory Tracking Controller Design for Unmanned Vehicles: A New
Methodology,” Journal of Field Robotics, doi: 10.1002/rob.21492, 2013.

VII CAIQ2015
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
G. Scaglia, A. Rosales, L. Quintero, V. Mut, R. Agarwal, "A linear interpolation-based controller design for
trajectory tracking of mobile robots," Control Engineering Practice, vol. 18, pp. 318-329, 2010.
G. Scaglia, L. M. Quintero, V. Mut and F. Di Sciascio, “Numerical methods based controller design for mobile
robots”, Robotica, vol. 27, pp. 269-279, 2009.
G. Scaglia, P. Aballay, M. Serrano, O. Ortiz, M. Jordan and M. Vallejo. “Linear algebra based controller design
applied to a bench-scale enological alcoholic fermentation”. Control Engineering Practice, vol. 25, pp. 66-74, Apr.
2014.
G. Strang, “Linear Algebra and Its applications”, 4th edition, Ed. United States of America: Thomson,
Brooks/Cole, 2006.
H. C. Lim, Y. J. Tayeb, J. M. Modak, P. Bonte, “Computational algorithms for optimal feed rates for a class of
fed-batch fermentation”, Biotechnol. Bioeng, pp. 1408-1420, 1986.
H. De Battistaa, J. Picó, E. Picó-Marco, “Nonlinear PI control of fed-batch processes for growth rate regulation”,
Journal of Process Control, vol. 22, issue 4, pp. 789–797, April 2012.
J. E. Cuthrell, L. T. Biegler, “Simultaneous optimization and solution methods for batch reactor control profiles”,
Comput. Chem. Eng., pp. 49-62, 1989.
J. Lee, S. Yup Lee, S. Park, A. P. J. Middelberg, “Control of fed-batch fermentations ", Biotechnologies
Advances, vol. 17, Issue 1, pp. 29–48, April 1999.
M. Ronen, Y. Shabtai, H. Guterman, “Optimization of feeding profile for a fed-batch bioreactor by an
evolutionary algorithm”, J. Biotechnol, pp. 252–263, 2002.
M. Serrano, G. Scaglia, S. Godoy, V. Mut, O. Ortiz, “Tracking Trajectory of Underactuated Surface Vessels
Based on a Linear Algebra Approach”. IEEE Transactions on Control Systems Technology, vol. pp., 2013.
R. Luus, “Optimization of fed-batch fermentors by iterative dynamic programming”, Biotechnol. Bioeng, pp.
599–602, 1993.
S. Rómoli, G. Scaglia, M. E. Serrano, S. A. Godoy, O. A. Ortiz, J. R. Vega. “Tracking of Optimal Concentration
Profiles for maximizing the Protein Production in a Fed-Batch Reactor”, ISA Transactions, 2015.