Embed Size (px)
Citation preview

Velocity model building by waveform inversion of early arrivalsand reflections: A 2D case study with gas-cloud effects
Wei Zhou1, Romain Brossier1, Stéphane Operto2, Jean Virieux1, and Pengliang Yang1
ABSTRACT
Joint full-waveform inversion (JFWI) combines reflectionwaveform inversion (RWI) and early-arrival waveform inver-sion to build a large-scale velocity model of the subsurface fromlong-offset data. The misfit function of JFWI requires an explicitseparation between the short-spread reflections and early arriv-als, the feasibility of which is illustrated with a real data casestudy. JFWI is alternated with a waveform inversion/migrationof short-spread reflections to provide a short-scale impedancemodel. This model is needed for building the sensitivity kernelof RWI along the two-way reflection paths. The large-scalevelocity macromodel built by JFWI can be used as the initialmodel for classic FWI to enrich the high-wavenumber contentof the subsurface model. We have developed an application of
this workflow to a real 2D ocean bottom cable (OBC) profileacross a gas cloud in the North Sea to review its main promisesand pitfalls. Viscoacoustic VTI seismic modeling allows us toaccount for attenuation and anisotropy effects in a passive wayduring JFWI and FWI. Using a smoothed version of an existingtraveltime tomographic model as the initial model, we first findthat the JFWI velocity macromodel is more accurate than theRWI counterpart thanks to the key contribution of the divingwaves. Second, we find that the large-scale velocity model up-dated by JFWI provides a more accurate initial model for classicFWI than does the original smoothed tomographic model. How-ever, because a data difference-based misfit function is used, 2DJFWI still suffers from cycle skipping when a crude 1D velocitymodel is used as the initial model; therefore, more robust misfitfunction should be designed to mitigate cycle skipping.
INTRODUCTION
Full-waveform inversion (FWI) is a promising tool for broadbandseismic imaging. It seeks an optimal subsurface model that fits therecorded seismic data, using linearized inversion methods. Due tothe nonlinearity of seismic waves with respect to model parameters,the method is sensitive to the initial guess of the subsurface, oftenbeing a smooth velocity macromodel. If the modeled data computedfrom this velocity model do not match the recorded data within ahalf-cycle, the inversion may be easily trapped into a local mini-mum (Tarantola, 1984; Virieux and Operto, 2009). Robust data-driven inversion strategies can be used to mitigate this issue by fre-quency, time (scattering-angle), and/or offset continuations (Bunkset al., 1995; Shipp and Singh, 2002; Sirgue and Pratt, 2004; Brossieret al., 2009). One can also consider more convex misfit functions
such as those based on correlation (Luo and Schuster, 1991; vanLeeuwen and Mulder, 2010; Luo et al., 2016), deconvolution(Luo and Sava, 2011; Warner and Guasch, 2014), dynamic warping(Hale, 2013; Ma and Hale, 2013), or optimal transport measurement(Engquist and Froese, 2014; Métivier et al., 2016).On the other hand, it is well-acknowledged that updating the long
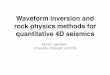
wavelengths of the velocity model by FWI is challenging in thedeep part of the subsurface, where the aperture illumination pro-vided by reflection data becomes insufficient and diving wavesdo not penetrate. In this setting, FWI mostly behaves as a least-squares migration as opposed to a velocity macromodel buildingtool. This implies that alternative imaging methods should be usedto update the long wavelengths of the deep structures before con-sidering imaging the short to intermediate wavelengths by FWI.This issue is illustrated in Figure 1, in which the resolution of
Manuscript received by the Editor 5 May 2017; revised manuscript received 15 September 2017; published ahead of production 30 November 2017; publishedonline 29 January 2018.
1University of Grenoble Alpes, Grenoble, France. E-mail: [email protected]; [email protected]; [email protected]; [email protected].
2University of Côte d’Azur, Valbonne, France. E-mail: [email protected].© 2018 Society of Exploration Geophysicists. All rights reserved.
R141
GEOPHYSICS, VOL. 83, NO. 2 (MARCH-APRIL 2018); P. R141–R157, 21 FIGS., 2 TABLES.10.1190/GEO2017-0282.1

FWI is analyzed in the framework of diffraction tomography (De-vaney, 1984). The wavenumber vector k imaged at a subsurfacepoint is determined by the sum of the wavenumber vectors kSand kR associated to the source and receiver wavefields, respec-tively. Accordingly, the resolution along the dip defined by the an-gle φ depends on the aperture angle θ made by kS and kR. In theshallow zones, the aperture angle varies over a wide range from 0°(zero-offset reflection) to 180° (diving waves), leading to a broadwavenumber coverage ranging from zero to half the wavelength.On the contrary, only large values of kkk are probed in the deepzones where the angular coverage becomes narrower, leading toa deficit of long-wavelength reconstruction.Many approaches have been proposed for updating low wave-
lengths at depth. Conventionally, ray-based tomographic methodsare widely implemented due to their computational efficiency(e.g., Farra and Madariaga, 1988; Lambaré, 2008; Taillandier et al.,2009; Prieux et al., 2013b). When limited-offset towed-streamerdata are used, the tomographic methods mostly rely on reflectiontraveltimes (as opposed to first-arrival traveltimes) because the lim-ited offset coverage prevents the diving waves from penetrating atsufficient depths. One pitfall of traveltime tomography is related topicking, which can be challenging for reflection phases performedeither in the data domain or in the image domain. Alternatively,more automatic waveform-based approaches implemented in theimage domain, such as differential semblance optimization (Symesand Carazzone, 1991), have been proposed to avoid the picking is-sue. In these approaches, the reflection data are migrated to generatecommon-image gathers (CIGs) and the velocity analysis processseeks to maximize the flatness of the reflectors along the surfaceoffset or angle axis. Other approaches rely on an extended modeldomain with space or time shifts and the velocity analysis processseeks to minimize the residual energy away from the zero shift(Sava and Fomel, 2006; Yang and Sava, 2011; Biondi and Almo-min, 2012; Sun and Symes, 2012; Lameloise et al., 2015).Inspired by the pioneering work of Chavent et al. (1994) and
Clément et al. (2001), data-domain waveform inversion strategies,referred to as reflection waveform inversion (RWI) in this paper,have been recently revisited to build the velocity macromodel
(Xu et al., 2012; Zhou et al., 2012; Wang et al., 2013; Brossier et al.,2015; Staal, 2015; Wu and Alkhalifah, 2015; Guo and Alkhalifah,2016; Alkhalifah and Wu, 2017). This method uses a prior short-wavelength reflectivity or perturbation model to compute the wave-form residuals of the reflected waves, which are then projectedalong the two-way reflection wavepath to update the velocitymodel. A key property of RWI is the limited sensitivity to cycleskipping at near offsets provided that a new reflectivity is builtby migration each time a new velocity model is updated. This mi-gration effort can be relaxed by performing the velocity update inthe pseudo-time domain to take advantage of the seismic invarianceof zero-offset traveltimes (Plessix, 2013; Brossier et al., 2015).
With the development of long-offset wide-azimuth acquisitiongeometries, increasing amounts of early arrival data (diving waves,refracted waves, and postcritical reflections) are recorded by towed-streamer or sea-bottom acquisitions. Waveform inversion of earlyarrivals (EWI) (Shipp and Singh, 2002; Sheng et al., 2006; Sirgue,2006; Shen, 2014) is suitable to preferentially sample the low ver-tical wavenumbers of the subsurface along subhorizontal wavepaths(Sirgue and Pratt, 2004). On the other hand, RWI is more suitable tosample low horizontal wavenumbers along subvertical wavepaths(Appendix A). Therefore, it is valuable to combine EWI andRWI to sample a wide wavenumber spectrum of the subsurface(Zhou et al., 2015; Alkhalifah and Wu, 2016). Wang et al. (2015)present a real data case study, in which refracted and reflected waveswere used to update the velocity macromodel. In our former work(Zhou et al., 2015), we proposed a unified formulation that naturallyintroduced diving waves into the RWI approach. With a syntheticcase study inspired from the Valhall oil field, we showed that usingthe diving waves in addition to the reflection counterparts leads to asignificant improvement of the velocity macromodel in the shallowpart, which translates to more accurate reflector images at depth. Wewere able to do so when starting from a crude 1D velocity model.The final joint FWI (JFWI) macromodel can be naturally used as theinitial model of classic FWI to increase the high-wavenumber con-tent of the velocity structure.This study aims to further assess the promises and pitfalls of
JFWI with a real 2D OBC data set collected across a gas cloudin the North Sea (Prieux et al., 2011, 2013a; Operto et al., 2015).A first velocity model was built by reflection traveltime tomography(courtesy of BP) and was used by Operto et al. (2015) as the initialmodel to perform 3D frequency-domain FWI. The relevance of theresulting FWI velocity model has been verified by time-domainseismic modeling and source-wavelet analysis, and the modelshows a clear image of a gas cloud above the reservoir level. Inthe present study, we use a 2D section of this 3D model acrossthe gas cloud as a reference model to assess our velocity modelsbuilt by JFWI and FWI in 2D geometry.This paper is organized as follows: First, we verify that 2D vis-
coacoustic modeling in the reference velocity section is sufficient toreproduce the amplitudes of the recorded phases. Then, we applyRWI and JFWI starting from a smoothed version of the reflectiontraveltime tomographic model. We show that JFWI outperformsRWI in the gas-cloud region. Then, the improved velocity macro-model built by JFWI is assessed as the initial model of classic FWI.We show that the FWI velocity model inferred from the JFWI modelis more accurate than the FWI model inferred from the smoothedtomographic model. This result is observed because the horizontalwavenumber content of the JFWI model has been enriched in the
Figure 1. Spatial resolution of diffraction tomography and its con-nection with acquisition geometry. The wavenumber vectors asso-ciated with the rays connecting the source and the receiver to thediffractor are denoted by kS and kR, respectively. The dip angle isdenoted by φ and the aperture (or scattering) angle by θ. The wave-number vector k ¼ kS þ kR is the spectral component mapped tothe subsurface model at the diffractor point during FWI.
R142 Zhou et al.

low-velocity gas cloud by RWI compared with that of the smoothedtomographic model. The sensitivity of JFWI to inaccurate ampli-tudes in the reflectivity and to the cycle skipping of early arrivalswill be reviewed in the “Discussion” section. Finally, we draw someconclusions from this case study and propose the perspectives ofthis work, particularly the one associated with the mitigation ofthe cycle-skipping issue.
METHODOLOGY
Assuming that some spectral gap exists at intermediate wave-numbers (Claerbout, 1985; Jannane et al., 1989; Lambaré et al.,2014), we can separate the subsurface model m into two scale com-ponents: a large-scale macromodel denoted by m0 and a short-scalereflectivity or perturbation model denoted by δm. The scale sepa-ration is imposed such that the macromodel m0 only controls thekinematics of wave propagation whereas the perturbation δm gen-erates all reflection/diffraction phenomena. In the RWI and JFWIapproaches, we seek to iteratively update m0 assuming that δmis known during each iteration. This assumption requires recomput-ing δm after each m0 update. The misfit function of RWI, whichupdates m0 from reflection data only, is given by
CRWIðm0Þjδm ¼ 1
2kWrðdr − Rδuðm0; δmÞÞk2; (1)
where dr denotes the recorded reflection data and δu denotes thecomputed full scattered wavefield, namely, the difference betweenthe wavefield computed in m0 and δm (i.e., uðm0; δmÞ) and thewavefield computed in m0 only (i.e., u0ðm0Þ). The real-valued op-erator R samples the computed full-scattered wavefield at receiverpositions and Wr is a weighting operator.In the JFWI formulation of Zhou et al. (2015), we consider
one additional term associated to early arrivals (direct waves,diving waves, refractions, and postcritical reflections) in the misfitfunction:
CJFWIðm0Þ ¼1
2kWrðdr − Rδuðm0; δmÞÞk2
þ 1
2kWeðde − Ru0ðm0ÞÞk2; (2)
where de denotes the early arrivals andWe is the associated weight-ing operator. This additional term is nothing but the misfit functionused in EWI. Note that the two separated terms imply an explicitseparation between early arrivals and short-spread reflections; oth-erwise, high-wavenumber components will be introduced in the m0
update (remember that the scale separation assumption requires nohigh-wavenumber update for m0). Later, when considering the real-data application, we will describe how we sepa-rate the early arrivals from the reflection eventsby time windowing.The JFWI gradient is given by
∇CJFWIðm0Þjδm ¼ u0⋆δλr þ δu⋆λr0þ u0⋆λd0 þ δu⋆δλr|fflfflffl{zfflfflffl}
≈0
; (3)
where λd0 ¼ λd0ðm0Þ denotes the adjoint fieldcomputed in m0 using the diving wave residualas the source term, λr0 ¼ λr0ðm0Þ denotes the ad-
joint field computed in m0 using the reflection data residual as thesource term, and δλr ¼ δλrðδm;m0Þ ¼ λrðm0; δmÞ − λr0ðm0Þ de-notes the full-scattered adjoint field using the reflection dataresidual as the source term. The symbol ⋆ denotes the zero-lagcrosscorrelation operation. The first two terms actually representthe sensitivity kernel of the RWI, whereas the third term representsthe kernel of the EWI.Regrouping quantities in equation 3 leads to an equivalent ex-
pression that is more appropriate for computational efficiency:
∇CJFWIðm0Þjδm ¼ ðu0 þ δuÞ⋆ðλr0 þ δλrÞ|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}G1
þ u0⋆ðλd0 − λr0Þ|fflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflffl}G2
:
(4)
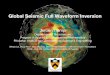
The gradient can be computed via the summation of two quantitiesG1 andG2 (Figure 2). The first quantityG1, using the reflection dataresidual as the source term in the adjoint-state equation, correspondsto the RWI gradient to which the undesired migration isochrones areadded. The second oneG2 is similar to the classic FWI gradient, butthe polarity of the migration isochrones related to the reflection dataresidual is reversed (note the minus sign in front of λr0 in G2), suchthat the undesired migration isochrones in G1 are totally canceledout after summation, giving the JFWI sensitivity kernel with onlylow-wavenumber content. Thanks to the explicit data separation, weare able to reverse the sign of the migration isochrones by justchanging the sign of the reflection data residual. These two quan-tities can be computed in a similar manner of computing the gra-dient of classic FWI. Therefore, the time complexity of the JFWIgradient is as twice as the one of the classic FWI gradient, whereasno memory overhead is generated by JFWI.The subsurface parameterization is an important issue in the
sense that it should favor the scale separation between the macro-model and the perturbation model underlying RWI-based methods.We consider the parameterization of the P-wave velocity VP andacoustic impedance (IP ¼ VP × ρ, where ρ denotes the density). Be-cause the forward-scattering regime associated with VP will updateits long-wavelength components and the backward-scattering re-gime associated with IP will update its short-wavelength compo-nents, we parameterize m0 with VP and δm with δIP accordingly(Zhou et al., 2015). In practice, δIP is computed by a classic iterativenonlinear FWI algorithm applied to near-offset reflection data. Suchoffset selection guides FWI toward the high-wavenumber updatesof the subsurface, in addition to the VP–IP parameterization. There-fore, FWI is recast as an iterative least-squares migration in thisshort-spread reflection setting. We think this particular FWI algo-rithm is more suitable to recover the true amplitude of δIP than
Figure 2. Three-step workflow to compute JFWI gradient. G1: RWI gradient to whichthe migration isochrone is added (the red line representing the prior reflector). G2: clas-sic FWI gradient with polarity-reversed migration isochrone. G1 þ G2: the exact JFWIgradient.
JFWI real application R143

least-squares reverse time migration, or a computationally efficientlinear ray-based waveform inversion, in which the forward problemis linearized with the Born approximation (e.g., Thierry et al.,1999). The first reason is that a two-way wave-equation modelingengine accounts for the free-surface multiples in a more natural waythan the ray-based counterpart through the implementation of thefree-surface boundary condition. The second reason is that inFWI iterations, the reflectivity from the previous iterations is in-jected into the background model of the current iteration, whichimproves the amplitude fit of reflections and can help to accountfor internal multiples and multiscattering during seismic modeling.The third reason is that the nonlinear term of the Hessian can furtherhelp to remove artifacts from the δm gradient associated withdouble-scattering paths. The computational burden of Hessianevaluation can be relaxed by adopting the quasi-Newton limited-memory Broyden-Fletcher-Goldfarb-Shannon (l-BFGS) scheme,which approximates the Hessian matrix by several historical gra-dients (Nocedal, 1980). Hereafter, we will refer to this specialFWI as IpWI.Using similar symbols as in equation 1, we can formulate the
misfit function of IpWI as follows:
CIpWIðδIPÞjVP;IP0 ¼1
2kWðdr − RδuðVP; IP0; δIPÞk2; (5)
where the operator W mutes data outside the offset selection windowand δu denotes the full-scattered wavefield (including multiples).In summary, a cycle workflow that alternates JFWI and IpWI is
proposed (Algorithm 1). A smooth initial velocity model Vð0ÞP is a
necessary input of the workflow. By smooth, we mean that thisvelocity model must not produce precritical reflection during seis-mic modeling. To perform full-waveform modeling, we also need asmooth impedance model IP0, which can be inferred from Vð0Þ
P us-ing a Gardner relation. Then, we enter the cycle workflow. In the kthcycle, we first estimate the source wavelet using the final velocitymodel of the previous cycle Vðk−1Þ
P (or the initial one Vð0ÞP ), as well
as IP0. Then, we initialize δIðkÞP to zero and iteratively update it in a
nonlinear way by IpWI, using Vðk−1ÞP as background velocity model.
Indeed, we have to regenerate a new δIðkÞP from the current back-ground velocity model Vðk−1Þ
P in each cycle before JFWI to honorthe seismic invariance of zero-offset traveltimes. Note that althoughthe IpWI iterations are performed in a nonlinear way, the smooth IP0is never updated during these iterations because IpWI is designed tofocus on short-wavelength subsurface updates. In other words, the
IP0 model is used in a passive way for the purpose of seismic mod-eling in each cycle. Finally, we iteratively build VðkÞ
P by JFWI usingVðk−1ÞP as the initial velocity model and δIðkÞP as the prior perturbation
model, respectively. The output of JFWI, i.e., VðkÞP , will be used as
the initial velocity model for the next cycle. Furthermore, each cycleinvolves two successive iterative updates of δIP and VP. The rel-evance of these two levels of iteration will be commented on inthe “Discussion” section. In the end, the final large-scale VP modelof the IpWI + JFWI workflow could be considered as a potentialinitial model for classic FWI.From our practical experience, one should use the same fre-
quency band to perform IpWI and JFWI in one cycle. In otherwords, we do not recommend using higher frequencies during IpWIrelative to JFWI, although high-wavenumber imaging is desiredfrom IpWI. This is because JFWI actually requires accurate reflec-tion coefficients, within the considered frequency band, to well re-produce the reflection amplitudes at all offsets. If a different band isused, inaccurate modeled amplitudes may contribute to irreduciblemisfits during JFWI and damage the quality of the velocity updateaccordingly. On the other hand, sufficiently broadband data aremore desirable than low-pass filtered data for JFWI because moreimpulsive seismograms can facilitate data separation by time win-dowing (Wang, 2015). For this reason, we implement JFWI in thetime domain where broadband data can be managed more naturally.
APPLICATION TO VALHALL DATA SET
Presentation of target and data
The target area is the shallow-water (70 m) Valhall oil field lo-cated in the North Sea (Barkved et al., 2010; Sirgue et al., 2010;Prieux et al., 2011, 2013a; Operto et al., 2015). A permanentOBC array was installed in 2003 for frequent analysis of the field(Yang et al., 2016a). This hydrophone array recorded 50,000 shotsat 5 m depth covering an area of 15 × 8 km2. In this 2D study, weprocess one OBC line crosscutting a gas cloud (Figures 2 and 4 inSirgue et al., 2010). A velocity model has been built by 3D reflec-tion traveltime tomography (courtesy of BP) and the corresponding2D section is shown in Figure 3a. The gas cloud in this paper is alow-velocity blob manifesting itself between 1 and 2.5 km depthembedded in the overburden (soft sediment) and above the top hardchalk (THC) reflector at 2.5–3 km depth. Using this tomographicmodel as the initial model, 3D frequency-domain FWI has largelyincreased the resolution of the velocity model (Figure 3b). The gas-cloud image is deblurred. A series of flat reflectors is imaged in thesedimentary layers, including those across the gas cloud and thebase cretaceous reflector below the reservoir.The selected OBC line provides a maximum offset of 13.44 km.
We process the shots and receivers in a reciprocal way to minimizethe number of forward simulations. The data preprocessing consistsof data normalization, Scholte wave elimination, and band-passButterworth filtering, followed by wavelet reshaping. Specifically,each receiver gather is first normalized by its maximum amplitude.Then, we filter out the Scholte wave in the f-k domain. The ringingeffect caused by aggressive band-pass filtering is mitigated bywavelet reshaping, which is designed in a similar way as a predic-tive deconvolution filter (Yilmaz, 1987), such that the data separa-tion between early arrivals and short-spread reflections can besimply implemented by time windowing (introduced later). No mul-tiples elimination is applied in the preprocessing.
Algorithm 1. Cycle workflow of alternating δIP and VPinversions.
Smooth models Vð0ÞP , IP0 ⇓
FOR cycle number k ¼ 1 to N
1. Source estimation in Vðk−1ÞP and IP0 models (inverse FFTof the
wavelet estimated by Pratt’s [1999] method).
2. Let δIðkÞP ¼ 0 and do iterative IpWI to image reflectivityin δIðkÞP .
3. Do iterative JFWI to update macro velocity:VðkÞ
P ¼ Vðk−1ÞP þ ΔVðkÞ
P .
END FOR.
R144 Zhou et al.

Two representative receiver gathers after preprocessing (3–7.1 Hzfrequency band) are shown in Figure 3c and 3d. Main body-wavephases are identified by different curves. The direct wave (the greenlines) shows amplitude variations at short offsets (e.g., x ¼ 13 km inFigure 3d), as it interferes with the reflected wavesfrom sedimentary layers (the blue curve). Thestrong reflection from the THC reflector is delin-eated by the red curves and is followed by deepreflections and multiples after 5 s at short offsets.Due to the low-velocity gas cloud, the right-sidebranch of the reflected waves in Figure 3c arriveslater than their left-side counterparts leading tononhyperbolic shapes, unlike in Figure 3d (theblue and red curves) in which short-spread reflec-tions are not affected by the gas cloud. At far off-sets, the diving waves (the dashed green lines)have lower amplitudes than the direct wavesdue to long propagation distances, attenuation,and lower velocity gradient in the gas cloud. Be-cause of the high velocities in the deep zone, thecritical and postcritical branches of the THC re-flection (the dashed red line) travel faster thanthe direct waves. Furthermore, the refracted wavefrom the THC reflector (the purple line) has beendelayed by the low velocities in the gas cloud andis not recorded as a first arrival.For accurate modeling of the water layer (70 m
thick), we use a 143 × 477 regular mesh with 35 mgrid size to discretize the subsurface parameters(VP and IP). The forward problem is performedwith a OðΔt2;Δx4Þ 2D staggered-grid finite-dif-ference method (Levander, 1988). The associatedCFL condition allows a sampling rate of 5 ms,leading to 1600 time steps for the 8 s time window. We consider amaximum frequency of 7.3 Hz to satisfy the criterion of five pointsper minimum wavelength (175 m). Except for the free surface, con-volution perfectly matched layers (e.g., Bérenger, 1994; Komatitschand Martin, 2007) are added to the edges of the model to avoid arti-ficial boundary reflections.
On the footprint of attenuation: Is viscoacousticmodeling required?
Before the inversion, we cautiously made a decision concerningthe modeling tool for wavefield simulation. Former studies (e.g.,Figure 23 in Operto et al., 2015) have confirmed that this dataset has negligible elastic effects due to mild velocity contrasts.Anisotropic effects are significant as indicated by the ϵ and δ mod-els built by reflection traveltime tomography (Figure 4a and 4b,courtesy of BP). These models are accurate enough to predictthe first-arrival traveltimes and are therefore suitable for FWI appli-cations (e.g., Figure 8 in Operto et al., 2015). However, using anacoustic VTI modeling code does not provide a satisfactory datamatch, even with the existing 3D FWI velocity model of Opertoet al. (2015). Figure 5a shows a direct comparison in the far-offsetdiving-wave window between the observed data and the syntheticdata computed by acoustic modeling. We can see some mismatchesbetween the recorded and modeled direct and diving waves, whichare attributed to the attenuation footprint when the P-waves propa-gate through the soft sediments and gas cloud. Indeed, Operto et al.
(2015) are able to reconstruct a high-resolution velocity model byviscoacoustic modeling based on the Kolsky-Futterman attenuationmodel using a homogeneous model of the quality factor (QP ¼ 200
below the water bottom as inspired from Prieux et al., 2011).
Figure 3. (a and b) Vertical section across the gas cloud of the velocity models built byreflection traveltime tomography (a) (courtesy of BP), and 3D frequency-domain FWI(b) (adapted from Operto et al., 2015). All velocity models shown in this paper areplotted in the same color scale. (c and d) Preprocessed common-receiver gathers locatedabove and away from the gas cloud. See the text for phase identification.
Q p
1
2
3
4
z (k
m)
4 6 8 10 12 14 16x (km)
0
0.04
0.08
0.12
1
2
3
4
z (k
m)
4 6 8 10 12 14 16
0
0.02
0.04
0.06
1
2
3
4
z (k
m)
4 6 8 10 12 14 16
50
100
150
200
a)
b)
c)
Figure 4. Thomsen parameters (a) ϵ and (b) δ built by reflectiontraveltime tomography (courtesy of BP). (c) The QP model analyti-cally derived from the 2D section of the velocity model of Opertoet al. (2015) (Figure 3b).
JFWI real application R145

The necessity of viscous modeling for a robust inversion schemehas been reviewed by the synthetic study of Kurzmann et al.(2013), who have shown a significant improvement of the velocitymodel if attenuation is considered even with a crudeQP backgroundmodel. These studies and the data mismatch shown in Figure 5aprompt us to perform viscoacoustic modeling.With our prior geologic knowledge of the field and validations from
numerical tests, we build a backgroundQP model by assigning strongattenuation in the shallow sedimentary layers and gas cloud. Consid-ering that the sedimentary layers and gas cloud are low-velocity struc-tures, we assume that QP is related to VP above the THC by apolynomial function given by QP¼95.17×ðVP−1.3Þ2.5þ50 (for1.5≤VP≤2.5 km∕s). The resulting QP model derived from the 3DFWI VP model is shown in Figure 4 (note QP ≈ 50 in the gas cloud).Below the THC, we assume QP ¼ 200. We use three standard linearsolid mechanisms (Emmerich and Korn, 1987; Carcione et al., 1988;Robertsson et al., 1994; Moczo and Kristek, 2005) to achieve a nearlyfrequency-independent QP (Plessix, 2016; Yang et al., 2016b). Themodeled seismograms computed by viscoacoustic modeling (Fig-ure 5b) now show a far better agreement with the recorded ones. How-ever, we still notice that a portion of the early arrivals (pointed by blackarrow) is not reproduced by our viscoacoustic VTI modeling tool. Thismismatch is attributed to the 2D geometry assumed by our modelingalgorithm. We verify this statement by performing 3D viscoacousticmodeling in the reference FWI model (Figure 5c). The modeledseismograms now reproduce the previously lacking diving waves, sug-gesting that they are produced by off-plane propagations and cannot betaken into account by 2D simulations. Because such phases are diffi-cult to be filtered out in the preprocessing stage, we leave them in thedata set. One has to keep in mind that the velocity models developed inthe following might be hampered by these 3D effects.Considering that we aim to build the low wavenumbers of VP and
the high wavenumbers of IP, we smooth the ϵ and δ models and usethem as passive parameters during JFWI and RWI. Smooth QP
models are derived from updated VP (smooth) models by usingthe aforementioned analytical relation before source estimationand inversion.
Initial model and data separation
The tomographic velocity model (Figure 3a) cannot be directlyused as the initial model for JFWI and RWI because it presents asharp velocity contrast at the 2.5 km depth. Therefore, we smooththis model with a 2D Gaussian filter (correlation length = 240 m) asshown in Figure 6a. In addition, JFWI requires separating short-spread reflections from early arrivals beforehand. This mightrequire a cautious analysis of the data anatomy and careful
Figure 5. Comparison of far-offset diving waves from the observed gather (replot of Figure 3d in blue-white-red color scale) and syntheticgather (plot in a variable area black wiggle display). The two data sets are in phase if the black area covers the blue part of the real data. Thesynthetic gather is computed by using (a) 2D acoustic, (b) 2D viscoacoustic, and (c) 3D viscoacoustic modeling tools, respectively. We choosethe 2D viscoacoustic modeling tool for the sake of numerical accuracy and efficiency.
1
2
3
4
z (k
m)
4 6 8 10 12 14 16x (km)
1.2
1.7
2.2
2.7
3.2VP (km/s)
1
2
3
4
z (k
m)
4 6 8 10 12 14 16
1.2
1.7
2.2
2.7
3.2VP (km/s)
1
2
3
4
z (k
m)
4 6 8 10 12 14 16
1.2
1.7
2.2
2.7
3.2VP (km/s)
a)
b)
c)
Figure 6. (a) Initial velocity model. Velocity models built by(b) RWI and (c) JFWI. RWI and JFWI decrease the velocity inthe gas cloud from the initial model. See Figure 7 for a 1D profilecomparison.
R146 Zhou et al.

preprocessing (e.g., wave-separation techniques may be needed tohandle diffractions in case of complex topography). Alternatively,we can model two wavefields with and without the prior perturba-tion model and generate the reflected (or scattered) wavefield bysubtracting the two fields. In this study, because the bathymetryand subsurface structures are reasonably flat, we bypass this mod-eling exercise and define the time window for data separation withan analytical relationship. Note that because the diving waves andthe postcritical reflection waves contribute to long-wavelengthupdate of the subsurface, we process them as early arrivals (seeAppendix B for a discussion on why postcritical reflections shouldbe used as early arrivals). The time window used to select earlyarrivals begins at t ¼ 0 s and ends at
tðhÞ ¼� ð1.59þ h∕1.608Þ s; h ≤ 5 km;8 s; h > 5 km;
(6)
where h denotes the offset (in km). The rest of the data are proc-essed as short-spread reflections. On the other hand, we use onlynear-offset reflections (<500 m) in IpWI to build the high-wave-number perturbation model.
RWI, JFWI, and FWI results
Macro velocity building by JFWI and RWI
We perform RWI and JFWI to highlight the added-value pro-vided by diving waves during the velocity macromodel building.In both cases, the data are band-pass filtered in the 3–5.1 Hz fre-quency band and we do not use any data weighting (i.e.,We,Wr areequal to the identity matrices) nor do we use offset continuationstrategies during inversion. In each cycle, we perform 5 l-BFGSiterations for IpWI and 10 preconditioned steepest-descent itera-tions for RWI or JFWI, respectively, using the SEISCOPE Optimi-zation Toolbox (Métivier and Brossier, 2016). Other optimizationschemes such as the conjugate gradient method can lead to similar
1.0
1.5
2.0
2.5
3.0
z (k
m)
1.5 2.0 2.5VP (km/s)
x = 11 km
1.0
1.5
2.0
2.5
3.0
1.5 2.0 2.5VP (km/s)
x = 12 km
1.0
1.5
2.0
2.5
3.0
z (k
m)
–8 –4 0 4 8Ip update (kg/s/m2)
1.0
1.5
2.0
2.5
3.0
–8 –4 0 4 8Ip update (kg/s/m2)x106 x106
b)a)
c) d)
Figure 7. (a and b) Vertical profiles of velocity models and (c and d)migrated images, at (a and c) x ¼ 11 and (b and d) 12 km. Includingearly arrivals, the JFWI model is closer to the reference model (Fig-ure 3b) than the RWI model at all depths.
Figure 8. Data fit for velocity models of Figure 6. Observed data are plotted in blue-white-red color scale. Synthetic data are plotted with a darkwiggle display. The two data sets are in phase if the blue part is covered by black. Synthetic data are computed in (a) the initial model, (b) RWImodel, and (c) JFWI model, respectively. The green line delineates the boundary between early-arrival and reflection time windows in JFWI. InRWI, the early arrivals are muted. JFWI provides the best fit of the early arrivals (the black and gray arrows).
JFWI real application R147

results, but they may not be as efficient as l-BFGS on the IpWI side.We will go back to this point later in the “Discussion” section. Westop the cycle workflow when the velocity update is negligible.The velocity models built by RWI and JFWI are shown in Fig-
ure 6b and 6c, respectively. Both models tend to decrease the veloc-ities in the gas cloud relative to the initial model. In Figure 7a and7b, we compare their vertical profiles at x ¼ 11 and 12 km withthose of the initial model and the reference FWI model from Opertoet al. (2015) (i.e., Figure 3b). At z < 1 km depths, JFWI improvesthe velocity model by building a high-velocity zone (black arrows),whereas the RWI model does not significantly update the initialmodel. This shallow update is observed because JFWI exploits div-ing waves that propagate in the upper structure, unlike RWI, whichhighlights that the sensitivity kernel associated with reflected wavesprovides limited information on the shallow structure at least for theconsidered frequency range. This shallow improvement in the JFWImodel leads to a more accurate reconstruction of the deeper struc-ture relative to RWI. The most cogent illustration is shown on theprofile at x ¼ 11 km, where JFWI closely matches the large-scalevariations of the reference profile (the gray arrow), unlike the RWIprofile that shows a smoother trend. This behavior is expected
because the vertical resolution of RWI is poorer than that ofEWI, and hence JFWI (Appendix A). At the 12 km position, weobserve a sharper low-velocity zone in the reference model, whosetrend cannot be precisely matched by the smooth JFWI model.However, the JFWI profiles clearly deviate from the initial modeltoward the reference model by generating an upper high-velocityzone above the gas cloud where the velocity is reduced. This trendis much better reproduced in the JFWI model than in the RWI one.Indeed, further resolution improvements of the JFWI model at thislocation are expected from the wide azimuth illumination thatwould be provided by 3D acquisition geometry. Furthermore, theRWI model seems to deviate from the reference profile. This behav-ior is probably due to an overestimation of lateral inhomogeneitiesby the RWI sensitivity kernel, which has been mitigated in JFWIthanks to the model constraints provided by early arrivals.We further assess the RWI and JFWI models by using them as
background models for migration/inversion (i.e., the IpWI step ofAlgorithm 1). The profiles of the migrated images generated fromthe RWI, JFWI, and the reference models are shown in Figure 7cand 7d at the same horizontal positions. At x ¼ 11 km, the mis-match between the migrated profiles inferred from the RWI andthe reference models increases with depth more significantly thanfor the JFWI model (2.5 km depth). Not surprisingly, these mispo-sitionings in depth are more pronounced at x ¼ 12 km, where thevelocity contrasts in the reference model are sharper.The data fits achieved by the initial, RWI, and JFWI models are
shown in Figure 8. The full-synthetic seismograms are computed insubsurface models, including the large-scale information from theRWI/JFWI VP model and the short-scale information from the IpWIδIP model (the IP0 model is the same as the initial one). The initialmodel allows us to fit the observed data at short offsets, whereassignificant mismatches between recorded and modeled divingwaves (the black arrow) at long offsets indicate inaccurate velocitiesin the shallow part of the model. Moreover, the mismatches betweenrecorded and modeled postcritical reflection (the gray arrow) indi-cate overestimated velocities in the gas cloud. The green lines inFigure 8b and 8c delineate the boundary along which the early arriv-als are separated from the reflected waves for RWI and JFWI. Thetime windows above and below the line select the early arrivals andthe short-spread reflections, respectively. Keep in mind that theearly arrivals are muted during RWI. In the case of RWI, the mis-matches between the recorded and modeled diving waves (the blackarrow) and postcritical reflections (the gray arrow) show that reflec-tion data alone cannot sufficiently recover the low-wavenumbercontent of the subsurface, particularly along the vertical dimension.On the other hand, the improved data fit achieved by JFWI datafurther confirms that a more accurate velocity model with a broaderwavenumber spectrum was built thanks to the additional informa-tion carried out by diving waves (Figure 8c).
FWI for broadband velocity imaging using different initialmodels
For broadband imaging, we perform classic 2D FWI with thel-BFGS scheme using two successive frequency bands 3–5.1 and3–7.1 Hz. The final FWI model using the JFWI model as the initialmodel is shown in Figure 9a. The vertical profiles show that thisreconstruction matches the reference model well, especially atz < 2.5 km depths (Figure 9b and 9c). Interestingly, we note thatthis velocity model is even more oscillatory than the reference
1.0
1.5
2.0
2.5
3.0
z (k
m)
1.5 2.0 2.5VP (km/s)
x = 11 km
1.5 2.0 2.5VP (km/s)
x = 12 km
4 6 8 10 12 14 16x (km)
1.6
1.8
2.0
2.2
VP (
km/s
)
z = 2.3 km
1
2
3
4
z (k
m)
4 6 8 10 12 14 16x (km)
1.2
1.7
2.2
2.7
3.2VP (km/s)
a)
b)
d)
c)
Figure 9. Two-dimensional FWI result using JFWI model as initialmodel. (a) FWI model. (b and c) Vertical profiles of the reference,initial, JFWI, and FWI models at (b) x ¼ 11 and (c) 12 km. (d) Hori-zontal profiles at 2.3 km depth.
R148 Zhou et al.

model, possibly due to the Gibbs effects resulting from a deficit ofwavenumber illumination given the 2D acquisition geometry. An-other reason might be due to the different attenuation models usedin the two implementations. More precisely, compared with Opertoet al. (2015), we use lower QP values in the gas cloud that havecontributed to sharpen the velocity contrasts. Horizontal profilesacross the gas cloud show that FWI further improves the low- tointermediate-wavenumber content of the subsurface simultaneouslywith the high-wavenumber one (Figure 9d). This improvement isobserved because the wide-aperture illumination provided by theOBC geometry is suitable to update a broad band of wavenumbercomponents when the full data set is processed altogether as in clas-sic FWI (Pratt and Worthington, 1990).We perform a second FWI using the smoothed version of the
tomographic model (Figure 6a) as the initial model. Our aim isto check if the JFWI model has provided an improved initial modelfor FWI compared with the smooth tomographic model. Althoughthe final FWI model inferred from the smooth tomographic model(Figure 10a) looks similar to that inferred from the JFWI model, aclose inspection of its horizontal profile across the gas cloud revealsthat it does not fully recover the low velocities in the gas cloud (Fig-ure 10b, the black arrow). In fact, FWI updates the intermediate- toshort-wavelength variations without fully recovering the long wave-lengths of the gas cloud (Figure 10b, the bluecurve), unlike the previous one starting fromthe JFWI model (Figure 10b, the green curve).Because FWI has negligible sensitivity to thelow horizontal wavenumbers carried by reflectedwaves, it cannot update these low wavenumbersthat are needed to properly image the gas cloud.Imaging these low wavenumbers along the re-flection paths before FWI is precisely the aimof JFWI.The data fit achieved by the two broadband
FWI models is of similar quality except forthe far-offset diving waves (Figure 11, the blackarrows). The seismograms computed in theJFWI + FWI model do not fit a portion of thediving waves, which is desirable because thesephases actually come from off-plane propagation(see Figure 5 and the section “On the footprintof attenuation: Is viscoacoustic modeling re-quired?”), unlike the second FWI model. It ispossible that during the second FWI implemen-tation, the synthetic diving waves were shifted toearlier traveltimes by producing relatively highervelocities in the gas cloud (Figure 10b, the black arrow), such thatthe associated misfit value is reduced (i.e., cycle skipping). In con-trast, thanks to the reflection-associated horizontal wavenumberconstraints that have been emphasized by JFWI, the first FWI im-plementation does not have sufficient freedom to fit these off-planearrivals. This 3D effect might explain why the JFWI model followedby the FWI model is more reliable than the tomography followed byFWI alone.The values of the L2 norm-based misfit function before and after
FWI are listed in Table 1. For each FWI implementation, the misfit issuccessfully reduced. However, comparing the misfit of the two FWIimplementations at the same stage (row-wise) shows that the misfitassociated to the second implementation (tomography + FWI) is
Figure 11. Data fit of far-offset diving waves for FWI results. Observed data are plottedin blue-white-red color scale. Synthetic data are plotted with a dark wiggle display. Thetwo data sets are in phase if the blue part is covered by black. (a) FWI using JFWI modelas initial model (Figure 9a). (b) FWI using the smoothed tomographic model as initialmodel (Figure 10a). The better fit in (b) pointed by the arrow is unwanted because thesephases have undergone significant 3D effects.
Table 1. Comparisons of the misfit function values betweenthe two FWI implementations. The second implementationalways ends with lower misfits because the off-plane divingwaves are fit undesirably.
# Initial model
3–5.1 Hz FWI 3–7.1 Hz FWI
Before After Before After
1 JFWI VP 1.13E-05 7.91E-06 4.23E-02 2.35E-02
2 Smooth tomo VP 1.34E-05 7.04E-06 3.37E-02 2.30E-02
4 6 8 10 12 14 16x (km)
1.6
1.8
2.0
2.2
VP (
km/s
)
z = 2.3 kmJFWI FWISmooth FWI
a)
b)
1
2
3
4
z (k
m)
4 6 8 10 12 14 16x (km)
1.2
1.7
2.2
2.7
3.2VP (km/s)
Ref.Initial
Figure 10. (a) Two-dimensional FWI result using the smoothed to-mographic model as initial model. (b) Horizontal profiles extractedfrom the FWI models of Figures 9a and 10a. The profile inferredfrom JFWI followed by FWI (the green curve) closely matches thereference profile (the black curve), unlike the profile inferred fromthe tomography followed by FWI (the blue curve).
JFWI real application R149

smaller than the misfit of the first implementation (JFWI + FWI) ex-cept at the initial stage. This may result from the fact that the secondFWI has fit the off-plane diving waves at the expense of the quality ofthe velocity model. Therefore, the global minimum of the misfit func-tion is no more associated to the solution representing the real subsur-
face structures. One may adopt a particular regularization scheme toovercome this kind of bias, but one might have to tune the hyper-parameters and/or incur extra costs. On the contrary, by improvingthe quality of the initial model, we manage to converge to a physi-cally meaningful result without regularization.
Migration-based quality control
We assess the quality of the velocity models in terms of kinematicaccuracy by analyzing the focusing of migrated images computedby RTM. The 3–7.1 Hz band is considered. The maximum offset ischosen to be 5 km because larger offsets would inject spurious low-wavenumber components into the migrated images without increas-ing the high-wavenumber content. The anisotropic models ϵ and δare same as in Figure 4a and 4b. The density model is inferred fromthe velocity model under assessment by a Gardner relation.Figure 12 shows the migrated images computed in the macro
velocity models of Figure 6. The reflector marking the top ofthe gas cloud (the green arrows) is partially repositioned downwardby RWI. However, its discontinuous character at x ¼ 11 km high-lights the lack of accuracy of the shallow RWI velocity model. Incontrast, JFWI leads to a more focused image of the reflectors mark-ing the top and bottom of the gas cloud (the green and blue arrows,respectively).Figure 13 shows the migrated images computed in the two
broadband velocity models built by FWI (Figures 9 and 10, respec-tively). We focus our attention on two areas located in the gas cloud(the yellow arrows) and below (the red arrows), where we expectthe JFWI + FWI model to be more accurate than the tomography +FWI counterpart. Indeed, the migrated image computed in theJFWI + FWI model is more focused than the one computed inthe tomography + FWI model. These statements are further verifiedin the following section by the analysis of surface-offset do-main CIGs.
Quality control by surface-offset domain CIGs
We assess the quality of the velocity models in terms of kinematicaccuracy by measuring the flatness of events in CIGs. The 3–7.1 Hzband is considered. The maximum offset is chosen to be 8 km be-cause longer offsets mainly record early arrivals. The anisotropicand density models are the same as in the section “Migration-basedquality control.”Figure 14 shows the CIGs computed in the macro velocity models
of Figure 6. In the near surface (the green arrows), the RWI back-ground model does not lead to any improvements compared withthe tomography model because it fails to recover the aforementionedlocalized high-velocity zone (see Figure 7a and 7b, the black arrows),whereas the JFWI model greatly improves the continuity and flatnessof the shallow events thanks to the higher kinematic accuracy pro-vided by the diving waves. The usefulness of early arrivals in JFWI toimprove shallow imaging relative to reflection-based velocity modelbuilding is fairly consistent with the result of Prieux et al. (2011)(their Figure 10), who compared CIGs computed in a tomographyand FWI models located a few kilometers southward. At greaterdepths, where we have more significant illumination from reflectedwaves with offsets, RWI marginally improves the flatness of theevents compared with the tomography model (the yellow arrows).On the other hand, the improvements provided by the JFWI modelare visible at the reservoir depth level below the gas cloud, where the
1
2
3
4
z (k
m)
4 6 8 10 12 14 16x (km)
1
2
3
4
z (k
m)
4 6 8 10 12 14 16
1
2
3
4
z (k
m)
4 6 8 10 12 14 16
a)
b)
c)
Figure 12. Migrated images using the (a) initial VP, (b) RWI VP,(c) JFWI VP models, respectively. Green arrows: images of the re-flector on top of the gas cloud. Blue arrows: images of THC reflec-tors at the bottom of the gas cloud. The image of the top reflector isrepositioned downward with degraded focusing from (a) to (b). Thefocusing of the top and bottom reflectors is greatly improved from(b) to (c).
1
2
3
4
z (k
m)
10 12 14 16x (km)
1
2
3
4
z (k
m)
4 6 8
4 6 8 10 12 14 16x (km)
a)
b)
Figure 13. Migrated images using the two FWI VP models startingfrom (a) smoothed tomographic VP and (b) JFWI VP, respectively.Yellow arrows: images of reflectors across the gas cloud. Red ar-rows: images of THC reflectors at the bottom of the gas cloud. Theimage focusing is better in (b) due to a more reliable FWI VP model.
R150 Zhou et al.

migrated image computed in the JFWI model shows a more continu-ous reflector (the blue arrows). Below the reservoir, the kinematicerrors of the RWI model accumulate particularly below the gas cloudleading to significant mispositionings of energetic events (the purplearrows). In contrast, we do not observe such mispositionings in theJFWI gathers. At the base Cretaceous reflector be-tween 3.5 and 4 km depth, we observe more lat-eral coherency from one gather to the next in theJFWI results (the red arrows).In Figure 15, we show the CIGs computed in
the two broadband velocity models built by FWI(Figures 9 and 10, respectively). Because themain differences between the two velocity mod-els are observed in the gas cloud, we focus onthe CIGs located between x ¼ 9 and 12 km.Although our former assessment concluded thatthe JFWI + FWI model is more reliable than thetomography + FWI counterpart, the nonflatevents pointed by the blue arrow of Figure 15btend to weight this conclusion. One possible rea-son is that the ϵ and δmodels have been used in apassive way during JFWI and FWI, and inaccur-acies of these models might have locally pre-vented reliable velocity updates during JFWIand FWI. Accordingly, anisotropic multipara-meter JFWI and FWI should be viewed toimprove these results (e.g., Guitton and Alkhali-fah [2017] in a similar environment). Apart fromthat, the events above the THC reflector are gen-erally more continuous and flatter in the CIGscomputed in the JFWI + FWI model (the yellowand red arrows).
DISCUSSION
We have combined the early arrivals and re-flected waves in a unified workflow for velocitymacromodel building and have applied ourworkflow to a 2D OBC line acquired in theValhall oil field. The data set shows significantattenuation footprint, which prompts us to per-form viscoacoustic forward modeling to repro-duce the waveform as accurately as possible.Compared with RWI, which relies on reflectedwaves only, JFWI builds a more accuratevelocity model. Quantitative assessment of thevelocity models and data fit shows that thelow-wavenumber content of the velocity macro-model has been significantly enriched duringJFWI. The quality of this macromodel is furtherassessed as an initial model for classic FWI,which further widens the range of updated wave-number components. In particular, we show howthe low horizontal wavenumbers, which are dif-ficult to update by classic FWI at great depths,have been nicely recovered by JFWI. Below,we discuss two aspects that affect the robustnessof JFWI.
On the number of iterations in each cycle
The purpose of IpWI in the cycle workflow (Algorithm 1) is tobuild prior reflectivity for JFWI. Because we recast IpWI as an iter-ative linearized inversion, a suitable number of iterations should be
0
1
2
3
4
z (k
m)
x (km)
0
1
2
3
4
z (k
m)
0
1
2
3
4
z (k
m)
7.0 7.4 7.8 8.2 8.6 9.0 9.4 9.8 10.2 10.6 11.0 11.4 11.8 12.2 12.6 13.0 13.4 13.8a)
b)
c)
Figure 14. CIGs from the (a) initial VP, (b) RWI VP, and (c) JFWI VP models, respec-tively. Green arrows: in the near surface, where improvement of event continuity byJFWI is highlighted. Yellow arrows: above the THC, where event flatness is marginallyimproved by RWI and is further improved by JFWI. Blue arrows: at the reservoir depth,where event flatness is improved by JFWI compared with RWI. Purple arrows: belowthe THC where artificial events appear in (b) but not in (c). Red arrows: where eventflatness associated to base Cretaceous reflector is greatly improved by JFWI comparedwith RWI.
0
1
2
3
4
z (k
m)
x (km)
0
1
2
3
4
z (k
m)
9.0 9.2 9.4 9.6 9.8 10.0 10.2 10.4 10.6 10.8 11.0 11.2 11.4 11.6 11.8 12.0a)
b)
Figure 15. The CIGs from the two FWI VP models starting from (a) smoothed tomo-graphic VP and (b) JFWI VP, respectively. Blue arrows: event flatness is unexpectedlyworse in (b). Yellow arrows: inside the gas cloud, where event continuity is improved byusing JFWI VP as initial model (b). Red arrows: on the THC, where event continuity isinfluenced by the high-velocity artifact pointed out in Figure 10b.
JFWI real application R151

found. On one hand, too many iterations increase the computationalcost. On the other hand, having too few iterations leads to incom-plete reconstruction of the impedance contrasts, which in turn injectartifacts in the gradient during the subsequent JFWI step. Let us takethe first cycle as an example (Figure 16). Figure 16a shows the mi-grated image obtained from five IpWI iterations based on thel-BFGS scheme, whereas Figure 16b shows the image from oneIpWI iteration only, which is equivalent to a line search procedure.The five-iteration IpWI generates a reflectivity image with reliableamplitudes, leading to nonnegligible reflection energy in the syn-thetic data, unlike the one-iteration IpWI (Figure 16c and 16d). As aresult, the JFWI gradient in the former case includes nearly equalcontributions from diving and reflected phases, respectively, lead-ing to a reasonable reconstruction of the gas-cloud image, whereasthe JFWI gradient in the latter case is dominated by the contribu-tions from diving waves only (the circles in Figure 16e and 16f).Note that, in Figure 16f, the gradient tends to undesirably increasethe velocity in the shallow part of the gas cloud, a consequence of apoor impedance model that fail to boost the reflection-associatedsensitivity kernel in the JFWI gradient; in this case, JFWI reducesto classic FWI.Therefore, the number of IpWI iterations should be sufficient to
recover the reflection coefficients (true-amplitude imaging condi-tion) in the impedance parameter. Alternatively, a quasi-Newton
scheme such as l-BFGS can be performed to approach the sameresolution with fewer iterations (taking curvature into account).This is why we chose l-BFGS for the more linear IpWI problem.Moreover, the asymptotic preconditioner proposed by Métivieret al. (2015) for FWI of short-spread data can serve as an efficienttool to speed up the convergence of IpWI and reduce the numberof iterations accordingly.The same question can be asked about the number of JFWI iter-
ations performed in each cycle. One may perform a large number ofiterations to make the low-wavenumber update more significant be-fore performing a new set of IpWI iterations. On the other hand, asignificant velocity update would require regenerating the reflectiv-ity accordingly so as to preserve the invariance of zero-offset trav-eltimes. Therefore, a proper number of JFWI iterations needs to befound. Considering this, we deliberately use the preconditionedsteepest-descent method for JFWI, which provides “modest” veloc-ity updates in a sense that the zero-offset traveltimes are notchanged remarkably; l-BFGS was also tried, but the update wastoo significant and artifacts were easily generated due to the pres-ence of noise. Nevertheless, a more elegant way would be to designthe JFWI in the pseudo-time domain in which the invariance ofzero-offset traveltimes is naturally guaranteed (Plessix, 2013;Brossier et al., 2015), and thus we can perform more JFWI itera-tions before IpWI in the next cycle.
On the sensitivity to the initial model
We find that JFWI is prone to cycle skippingwhen the initial model inaccurately predicts thetraveltimes of early arrivals. To illustrate this is-sue, we average the former 2D smoothed tomo-graphic model to build a crude 1D initialvelocity model (Figure 17a). The JFWI velocitymodel using the 1D initial model exhibits a pairof high-velocity subvertical patterns above theTHC depth level (the dashed curves). Figure 17cand 17d shows the fit of the postcritical reflec-tions (the green arrows) and diving waves (theblack arrows) achieved by the 1D initial andJFWI models, respectively. Due to the overesti-mated velocity in the gas cloud of the 1D initialmodel, neither the postcritical reflections northe diving waves are properly matched (Fig-ure 17c). Subsequently, JFWI fails to recoverthe structure of the gas cloud with a sufficientaccuracy to match the postcritical reflections(Figure 17d). The waveform of the diving waveswas apparently fitted; however, this is a cycle-skipped fit as illustrated in Figure 17e. It is evi-dent that JFWI has decreased the misfit functionwith an overestimated traveltime lag, a typicalcycle-skipping phenomenon caused by poor in-itial models. Using shorter offsets may help tomitigate cycle skipping, but this will limit theband of low wavenumbers that can be retrieved.Therefore, JFWI still requires a reasonable ini-tial model, especially when the L2 norm-basedmisfit function is considered.
1
2
3
4
z (k
m)
4 6 8 10 12 14 16 4 6 8 10 12 14 16x (km)
–8
–4
0
4
8
x106
2
3
4
5
6
7
t (s)
6 8 10 12 14 –14 –12 –10 –8 –6
1
2
3
4
z (k
m)
4 6 8 10 12 14 16 4 6 8 10 12 14 16
–1
0
1
(km/s/m2)x (km)
–1.0
–0.8
–0.6
–0.4
–0.2
0
0.2
0.4
0.6
0.8
x10–7
a) b)
c) d)
e) f)
Figure 16. Degraded JFWI gradient caused by partial recovery of reflection coefficients.Migrated images by IpWI with (a) five and (b) one iteration. (c and d) Synthetic gatherscomputed from the reflectivity images shown in (a and b). Note the mirrored gather in(d). (e and f) The resulting JFWI gradient. Positive and negative values of the gradient(namely, the negative and positive velocity updates) are plotted in blue and red, respec-tively. Note how the blue part of the gradient in (e) is inhibited by the red part in (f) dueto the insignificant reflection energy in (d).
R152 Zhou et al.

CONCLUSION
We have presented an application of 2D JFWI on real ocean-bot-tom seismic data for velocity macromodel building in a gas-cloudenvironment. We have shown that our cycle workflow that alter-nates JFWI and impedance waveform inversion allows us to buildan improved initial velocity model for classic FWI. The key factorsthat contribute to this achievement are twofold: First, the low ver-tical wavenumber information contained in the diving waves has
been successfully mapped into the JFWI model, making this ap-proach more robust than reflection-only waveform inversion. Sec-ond, the sensitivity kernel of JFWI emphasizes the reflectionwavepaths along which the low horizontal wavenumber compo-nents of the subsurface can be imaged. Combining these two com-plementary components enables us to build a kinematically accuratevelocity model that can be used as an initial model for classic FWIof long-offset data.Several improvements of the method should be investigated.
First, the proposed approach requires good estimations of reflectioncoefficients to mitigate amplitude-related residuals during JFWI.An asymptotic preconditioner can be used to improve the conver-gence rate of the impedance waveform inversion and decrease thecomputational cost of the method accordingly. Second, the numberof JFWI iterations should be large enough to generate a significantvelocity update, and the invariance of zero-offset traveltimes needsto be preserved to maintain the kinematic consistency between thevelocity updates and the current impedance image. This can beachieved by performing JFWI in the pseudo-time domain. Third,JFWI should be made immune to cycle skipping to take advantageof the full offset range. Several misfit functions based on correla-tion, deconvolution, or optimal transport can be viewed to achievethis goal. Indeed, the extension of the method to 3D wide-azimuthgeometry, which is expected to be affordable from the current in-vestigation, is of high interest to assess the promises and pitfalls ofthe method in a more favorable setting.
ACKNOWLEDGMENTS
This study is funded by the SEISCOPE consortium (http://seiscope2.osug.fr), sponsored by AKERBP, CGG, CHEVRON,EXXON-MOBIL, JGI, SHELL, SINOPEC, STATOIL, TOTAL,and WOODSIDE. The authors appreciate AKERBP ASA andHESS AS for providing the data set and for permission to publishthis work and particularly express their gratitude for R. Milne and E.J. Kjos’ support. The authors also appreciate fruitful discussionswith F. Audebert, L. Métivier, A. Górszczyk, and P. Wellington.They also thank V. Socco, J. Etgen, A. Guitton, E. Biondi, andtwo anonymous reviewers for their constructive comments. Thiswork is a part of the Ph.D. program of the first author, who acknowl-edges H. Chauris and R.-E. Plessix for their review of the thesis andG. Lambaré for his participation of the defense. This study isgranted access to the HPC resources of the Froggy platform ofthe CIMENT infrastructure, which is supported by the Rhône-Alpesregion (grant CPER07_13 CIRA), the OSUG@2020 labex (refer-ence ANR10 LABX56), and the Equip@Meso project (referenceANR-10-EQPX-29-01) of the programme Investissements d’Avenirsupervised by the Agence Nationale pour la Recherche, and theHPC resources of CINES/IDRIS/TGCC under the allocation046091 made by GENCI.
APPENDIX A
A BRIEF ANALYSIS OF EWI AND RWI SAMPLINGS
We use a simple configuration to illustrate that the sensitivity ker-nels of EWI and RWI are complementary to each other in terms ofspectral coverage, and therefore it is valuable to combine them in aunified formulation for velocity macromodel building. For thorough
Figure 17. The JFWI result using a crude 1D initial model. (a) Ini-tial model. (b) JFWI model. (c and d) Data fit at far offsets achievedby the (a) initial model and (b) JFWI model using the same colormaps as before. The poor match of the postcritical reflections to-gether with the cycle skipping of the diving waves have led tothe high-velocity artifacts in (b) delineated by the dashed curves.(e) Magnification on diving waves of seismograms at x ¼ 5 km po-sition (the black arrow in d). The envelope of the seismogram is alsoplotted to measure the traveltime of the refracted wave packet. Un-desirably, the minimization of the JFWI misfit function shifts themodeled seismograms to earlier traveltimes.
JFWI real application R153

reviews, the reader is referred to Wu and Toksöz (1987) andMora (1989).
For the sake of illustration, we consider a two-layer medium andone source-receiver pair (Figure A-1a). The raypaths of the directand reflected waves, recorded at the receiver position, are repre-sented by arrows in the figure. The EWI sensitivity kernel (Fig-ure A-1b) corresponds to the first Fresnel zone associated withthe direct wave propagating in the upper part of the medium,whereas the RWI sensitivity kernel (Figure A-1c and A-1d) isformed by a pair of first Fresnel zones along the reflection wave-path. According to the principle of diffraction tomography, the dipangle of the wavenumber vector k that is sampled at a point P isdefined by the sum of the angles of the source and receiver wave-number vectors, denoted by kS and kR, respectively, with respect tothe vertical axis (Figure 1). This geometric consideration impliesthat EWI primarily maps the vertical component kz of k becausethe source and receiver are near the surface, whereas RWI primarilymaps the horizontal component kx because the virtual source or vir-tual receiver is buried below the reflector.For the sake of simplicity, let us consider a homogeneous back-
ground model and one frequency component. For the EWI kernel,the expressions relating kx and kz to the half-offset h are given by
kx ¼ω
c0
xþ hffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
z2 þ ðxþ hÞ2p þ x − hffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
z2 þ ðx − hÞ2p
!; (A-1)
kz ¼ω
c0
zffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
z2 þ ðxþ hÞ2p þ zffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
z2 þ ðx − hÞ2p
!; (A-2)
where ω denotes the angular frequency, c0 is the P-wave velocitybackground, and ðx; zÞ are the coordinates of P. This relation alsoapplies for FWI kernel (Wu and Toksöz, 1987; Mora, 1989). For theRWI kernel, a couple of kx and kz is given due to the presence of thetwo first Fresnel zones:
kx;1 ¼ω
c0
xþ hffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
z2 þ ðxþ hÞ2p þ x − hffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðz − 2DÞ2 þ ðx − hÞ2p
!;
(A-3)
kx;2 ¼ω
c0
xþ hffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðz − 2DÞ2 þ ðxþ hÞ2p þ x − hffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
z2 þ ðx − hÞ2p
!;
(A-4)
kz;1 ¼ω
c0
zffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
z2 þ ðxþ hÞ2p þ z − 2Dffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðz − 2DÞ2 þ ðx − hÞ2p
!;
(A-5)
Figure A-1. The EWI and RWI sensitivity kernels. (a) Simple con-figuration with one source-receiver couple and a two-layer medium.The resolution of EWI and RWI at P will be compared. (b) The firstFresnel zone associated with the direct wave giving one imagedwavenumber vector k decomposed in the Cartesian system (verticalkz and horizontal kx components). (c and d) The first Fresnel zonesassociated to reflected wave along the two-way reflection wavepath,giving two imaged wavenumber vectors at the same point (the bluearrows).
Figure A-2. Scatter diagram of EWI and RWI samplings. Eachpoint denotes the tail of a wavenumber vector k as representedby the red and blue arrows in Figure A-1. Red dots: EWI wavenum-ber vectors. Blue dots: RWI wavenumber vectors. Purple dots: EWIwavenumber vectors with halved frequency. Bright blue dots: RWIwavenumber vectors with halved frequency.
R154 Zhou et al.

kz;2 ¼ω
c0
z − 2Dffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðz − 2DÞ2 þ ðxþ hÞ2p þ zffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
z2 þ ðx − hÞ2p
!;
(A-6)where D denotes the depth of the reflector.Using the above expressions, we can compute kx and kz in the
configuration of Figure A-1 (i.e., given x, z, h, ω, c0, and D), andwe draw a single point in the kx-kz Cartesian system denoting thatthe corresponding wavenumber can be sampled by this configura-tion. Moreover, in the following, we want to mimic a more realisticacquisition geometry, in which multiple sources and receiversare deployed near the surface (2D geometry). The collection ofall points representing sampled wavenumbers is plotted in Fig-ure A-2a (the vertical axis is jkzj because the sampling is symmet-rical to the kx-axis). We have assumed an infinite length ofacquisition implying x can approach infinity, but requiredh ≤ 600 m. In addition, to mimic EWI configurations, we alsomake h > 100 m to exclude small-angle samplings. We use con-stant z ¼ 60 m and D ¼ 120 m. We normalize the kx and kz valuesby the modulus
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffik2x þ k2z
p.
The EWI sampling pattern (the red dots) asymptotically ap-proaches to the outer dashed semicircle near kx∕kkk ¼ �1, and ap-proaches to the two inner dashed circles as h → ∞. On the otherhand, the two inner semicircles and the kx-axis defines the wave-number spectrum that can be resolved by RWI (the blue dots) (seealso Figure 5 in Mora, 1989).The first conclusion is that with a single frequency, the wavenum-
ber spectra that can be resolved by EWI and RWI do not overlap andtherefore are fully complementary to each other. Second, if we focuson the low-wavenumber part of the spectrum (0 ≤ jkzj∕kkk ≤ 0.5),namely, the one of interest for velocity macromodel building, EWImaps low wavenumbers around the kx ¼ 0 line (ignoring thosesampled along the kx∕kkk ¼ �1 lines, which are brought from veryfar away source-receiver pairs). This implies that EWI primarily re-constructs nearly vertical low-wavenumber vectors associated withhorizontally stratified structures such as THC. In contrast, RWIsamples a wider range of low-wavenumber vectors with various rel-ative horizontal and vertical components, and hence it is more ame-nable to image subsurface structures with significant dips, such as agas cloud or salt body.When the maximal half-offset is decreased, for instance, to 200 m
as in Figure A-2b, EWI cannot resolve any more low vertical wave-numbers at the same depth as before due to the lack of wide-scat-tering angle coverage, whereas RWI still maintains its samplings oflow vertical wavenumbers (compare the red and blue dots in Fig-ure A-2b). The purple dots represent the EWI sampling using thesame offset range, but with a halved frequency (ω∕2). Because kz,kx scales with ω (equations A-1–A-6), these dots can partially fillthe spectral “blank” as mentioned. However, such samplings oflower wavenumbers are often prevented by the noise issue in prac-tice. Note that the halved frequency only provides a denser RWIsampling than before (the bright blue dots).
APPENDIX B
HOW DO WE USE POSTCRITICALREFLECTIONS IN JFWI?
In this appendix, we discuss whether postcritical reflectionsshould be processed as early arrivals or as reflections in our JFWI
formalism. On the one hand, in a manner comparable with precriti-cal reflections, postcritical reflections follow two-way reflectionwavepaths, from which one can build the first Fresnel zones alongthe transmitted wavepaths of the reflections by RWI (as the onesshown in Figure A-1c and A-1d). As such, they could be processedas reflections in the JFWI formalism. On the other hand, due to thewide reflection angles, the postcritical migration isochrones built byFWI have a richer low-wavenumber content relative to the precriti-cal counterparts, and hence they may be left in the JFWI gradient.Furthermore, as we move to wider and wider reflection angles, thewavepath of postcritical reflections gradually tends toward the oneof the diving waves until they merge at the grazing point (like theone shown in Figure A-1a). As such, postcritical reflections couldalso be processed as early arrivals in the JFWI formalism.To illustrate this duality, we pick two samples of postcritical re-
flections in the yellow box of Figure B-1 and compute the corre-sponding FWI (or EWI) gradient (Figure B-2a) and RWI gradient(Figure B-2c). We observe that the FWI gradient is dominated bythe wide postcritical migration isochrone at the THC depth level,along which the low-to-intermediate vertical wavenumbers canbe updated. Conversely, the RWI gradient highlights the first Fres-nel zones centered on the two-way reflection wavepaths alongwhich low-to-intermediate subhorizontal wavenumbers can beupdated.Therefore, both two gradients could be used for velocity macro
model building and may be involved in the JFWI gradient, if thedata are separated by an overlapping time window in which theoverlapping area includes the postcritical reflections. However,nonoverlapping windows are preferred in this paper because theyare more easily implemented in the framework of JFWI. This meansthat we must process the postcritical reflections either as early arriv-als or as reflections, hence keeping only one of the two kernels.
0
1
2
3
4
5
6
7
t (s)
4 6 8 10 12 14 16x (km)
Reflectionwindow
Early-arrivalwindow
Figure B-1. Two ways of data separation regarding two differentviews of the postcritical reflections (in the yellow box). Red line:postcritical reflections in the reflection time window. Green line:postcritical reflections in the early-arrival time window (see Fig-ure 3d for phase identification).
JFWI real application R155

Therefore, two different time windowings can be considered. Thefirst one as adopted in this paper separates diving waves and post-critical reflections from the precritical reflections (the green line inFigure B-1), whereas the second one separates the diving wavesfrom the pre and postcritical reflections (red line in Figure B-1).The JFWI gradients computed with these two time windowingsare shown in Figure B-2b and B-2d, respectively. The major differ-ence is that the gradient in Figure B-2b has a much deeper sensi-tivity (the yellow circles) than in Figure B-2d, thanks to thepostcritical low-wavenumber migration isochrones. These deeplow-wavenumber components cannot be provided by diving wavesnor by precritical reflections. Because one of our aims is to improvethe capability to image deep targets, we chose to leave these migra-tion isochrones in the JFWI gradient, and hence we process thepostcritical reflections as early arrivals. Another advantage of thisstrategy is that, in a similar way to diving waves, the subverticalwavenumbers updated along the postcritical migration isochronesare complementary to the subhorizontal counterparts updated alongthe transmitted wavepaths of the precritical reflections.From the data-separation perspective, postcritical reflections can
be reasonably well-separated from diving waves near the criticalincidence. However, as we move to wider reflection angles far be-yond the critical incidence, the traveltimes of the postcritical reflec-tions become very close to those of the diving waves, and hencethese two kinds of waves cannot be easily separated in the time-off-set domain. This is a second practical reason why we choose toprocess postcritical reflections as early arrivals.
REFERENCES
Alkhalifah, T., and Z. Wu, 2016, The natural combination of full and image-based waveform inversion: Geophysical Prospecting, 64, 19–30, doi: 10.1111/1365-2478.12264.
Alkhalifah, T., and Z. Wu, 2017, Migration velocity analysis using pre-stackwave fields: Geophysical Prospecting, 65, 639–649, doi: 10.1111/1365-2478.12439.
Barkved, O., U. Albertin, P. Heavey, J. Kommedal, J. van Gestel, R. Syn-nove, H. Pettersen, and C. Kent, 2010, Business impact of full waveform
inversion at Valhall: 80th Annual International Meet-ing, SEG, Expanded Abstracts, 925–929.
Bérenger, J.-P., 1994, A perfectly matched layer forabsorption of electromagnetic waves: Journal ofComputational Physics, 114, 185–200, doi: 10.1006/jcph.1994.1159.
Biondi, B., and A. Almomin, 2012, Tomographic fullwaveform inversion (TFWI) by combining full wave-form inversion with wave-equation migration velocityanalysis: 82nd Annual International Meeting, SEG,ExpandedAbstracts, doi: 10.1190/segam2012-0275.1.
Brossier, R., S. Operto, and J. Virieux, 2009, Seismicimaging of complex onshore structures by 2D elasticfrequency-domain full-waveform inversion: Geo-physics, 74, no. 6, WCC105–WCC118, doi: 10.1190/1.3215771.
Brossier, R., S. Operto, and J. Virieux, 2015, Velocitymodel building from seismic reflection data by fullwaveform inversion: Geophysical Prospecting, 63,354–367, doi: 10.1111/1365-2478.12190.
Bunks, C., F. M. Salek, S. Zaleski, and G. Chavent,1995, Multiscale seismic waveform inversion: Geo-physics, 60, 1457–1473, doi: 10.1190/1.1443880.
Carcione, J., D. Kosloff, and R. Kosloff, 1988, Wavepropagation simulation in a linear viscoacousticmedium: Geophysical Journal International, 93,393–401, doi: 10.1111/j.1365-246X.1988.tb02010.x.
Chavent, G., F. Clément, and S. Gòmez, 1994, Auto-matic determination of velocities via migration-based traveltime waveform inversion: A syntheticdata example: 64th Annual International Meeting,
SEG, Expanded Abstracts, 1179–1182.Claerbout, J., 1985, Imaging the earth’s interior: Blackwell Scientific Pub-
lication.Clément, F., G. Chavent, and S. Gómez, 2001, Migration-based traveltime
waveform inversion of 2-D simple structures: A synthetic example: Geo-physics, 66, 845–860, doi: 10.1190/1.1444974.
Devaney, A., 1984, Geophysical diffraction tomography: IEEE Transactionson Geoscience and Remote Sensing, GE-22, 3–13, doi: 10.1109/TGRS.1984.350573.
Emmerich, H., and M. Korn, 1987, Incorporation of attenuation into time-domain computation of seismic wavefield: Geophysics, 52, 1252–1264,doi: 10.1190/1.1442386.
Engquist, B., and B. D. Froese, 2014, Application of the Wasserstein metricto seismic signals: Communications in Mathematical Science, 12, 979–988, doi: 10.4310/CMS.2014.v12.n5.a7.
Farra, V., and R. Madariaga, 1988, Non-linear reflection tomography: Geo-physical Journal, 95, 135–147, doi: 10.1111/j.1365-246X.1988.tb00456.x.
Guitton, A., and T. Alkhalifah, 2017, A parameterization study for elasticVTI full waveform inversion of hydrophone components: Synthetic andNorth Sea field data examples: Geophysics, 82, no. 6, R299–R308, doi:10.1190/geo2017-0073.1.
Guo, Q., and T. Alkhalifah, 2016, Elastic reflection based waveform inver-sion in isotropic media: 78th Annual International Conference and Exhi-bition, EAGE, Extended Abstracts, doi: 10.3997/2214-4609.201601194.
Hale, D., 2013, Dynamic warping of seismic images: Geophysics, 78, no. 6,S105–S115, doi: 10.1190/geo2012-0327.1.
Jannane, M., W. Beydoun, E. Crase, D. Cao, Z. Koren, E. Landa, M.Mendes, A. Pica, M. Noble, G. Roeth, S. Singh, R. Snieder, A. Tarantola,and D. Trezeguet, 1989, Wavelengths of earth structures that can be re-solved from seismic reflection data: Geophysics, 54, 906–910, doi: 10.1190/1.1442719.
Komatitsch, D., and R. Martin, 2007, An unsplit convolutional perfectlymatched layer improved at grazing incidence for the seismic wave equa-tion: Geophysics, 72, no. 5, SM155–SM167, doi: 10.1190/1.2757586.
Kurzmann, A., A. Przebindowska, D. Kohn, and T. Bohlen, 2013, Acousticfull waveform tomography in the presence of attenuation: A sensitivityanalysis: Geophysical Journal International, 195, 985–1000, doi: 10.1093/gji/ggt305.
Lambaré, G., 2008, Stereotomography: Geophysics, 73, no. 5, VE25–VE34,doi: 10.1190/1.2952039.
Lambaré, G., P. Guillaume, and J. Montel, 2014, Recent advances in ray-based tomography: 76th Annual International Conference and Exhibition,EAGE, Extended Abstracts, doi: 10.3997/2214-4609.20141151.
Lameloise, C.-A., H. Chauris, and M. Noble, 2015, Improving the gradientof the image-domain objective function using quantitative migration for amore robust migration velocity analysis: Geophysical Prospecting, 63,391–404, doi: 10.1111/1365-2478.12195.
Levander, A. R., 1988, Fourth-order finite-difference P-SV seismograms:Geophysics, 53, 1425–1436, doi: 10.1190/1.1442422.
0
1
2
3
4
z (k
m)
6 8 10 12 14 16x (km)
-0.5
0
0.5 0
1
2
3
4
6 8 10 12 14 16x (km)
–1
0
1
0
1
2
3
4
z (k
m)
6 8 10 12 14 16
-0.5
0
0.5 0
1
2
3
4
6 8 10 12 14 16
–1
0
1
a) b)
c) d)
Figure B-2. On the use of postcritical reflections in JFWI. (a) FWI and (c) RWI gra-dients using two samples of postcritical reflections (the yellow box in Figure B-1). (band d) JFWI gradient computed for the full shot gather and the two data separationsshown in Figure B-1. (b) Postcritical reflections included in the early-arrival window(the green line separation of Figure B-1). (d) Postcritical reflections included in the re-flection window (the red line separation of Figure B-1). The VP model of Figure 6a isused. Dashed arrow: low- to intermediate-wavenumber update along the postcritical mi-gration isochrones. Solid arrow: low-wavenumber update along the transmission pathsof postcritical reflections. Dashed circles: Note how the low wavenumbers in (b), gen-erated by the postcritical migration isochrones, are missing in (d).
R156 Zhou et al.

Luo, S., and P. Sava, 2011, A deconvolution-based objective function forwave-equation inversion: 81st Annual International Meeting, SEG, Ex-panded Abstracts, 2788–2792.
Luo, Y., Y. Ma, Y. Wu, H. Liu, and L. Cao, 2016, Full-traveltime inversion:Geophysics, 81, no. 5, R261–R274, doi: 10.1190/geo2015-0353.1.
Luo, Y., and G. T. Schuster, 1991, Wave-equation traveltime inversion: Geo-physics, 56, 645–653, doi: 10.1190/1.1443081.
Ma, Y., and D. Hale, 2013, Wave-equation reflection traveltime inversionwith dynamic warping and full waveform inversion: Geophysics, 78,no. 6, R223–R233, doi: 10.1190/geo2013-0004.1.
Métivier, L., and R. Brossier, 2016, The SEISCOPE optimization toolbox: Alarge-scale nonlinear optimization library based on reverse communica-tion: Geophysics, 81, no. 2, F11–F25, doi: 10.1190/geo2015-0031.1.
Métivier, L., R. Brossier, Q. Mérigot, E. Oudet, and J. Virieux, 2016, Meas-uring the misfit between seismograms using an optimal transport distance:Application to full waveform inversion: Geophysical Journal Interna-tional, 205, 345–377, doi: 10.1093/gji/ggw014.
Métivier, L., R. Brossier, and J. Virieux, 2015, Combining asymptotic lin-earized inversion and full waveform inversion: Geophysical JournalInternational, 201, 1682–1703, doi: 10.1093/gji/ggv106.
Moczo, P., and J. Kristek, 2005, On the rheological models used for time-domain methods of seismic wave propagation: Geophysical Research Let-ters, 32, L01306, doi: 10.1029/2004GL021598.
Mora, P. R., 1989, Inversion = migration + tomography: Geophysics, 54,1575–1586, doi: 10.1190/1.1442625.
Nocedal, J., 1980, Updating Quasi-Newton matrices with limited storage:Mathematics of Computation, 35, 773–773, doi: 10.1090/S0025-5718-1980-0572855-7.
Operto, S., A. Miniussi, R. Brossier, L. Combe, L. Métivier, V. Monteiller,A. Ribodetti, and J. Virieux, 2015, Efficient 3-D frequency-domain mono-parameter full-waveform inversion of ocean-bottom cable data: Applica-tion to Valhall in the visco-acoustic vertical transverse isotropic approxi-mation: Geophysical Journal International, 202, 1362–1391, doi: 10.1093/gji/ggv226.
Plessix, R. E., 2013, A pseudo-time formulation for acoustic full waveforminversion: Geophysical Journal International, 192, 613–630, doi: 10.1093/gji/ggs056.
Plessix, R. E., 2016, Visco-acoustic full waveform inversion: 78th AnnualInternational Conference and Exhibition, EAGE, Extended Abstracts, doi:10.3997/2214-4609.201600827.
Pratt, R. G., 1999, Seismic waveform inversion in the frequency domain.Part I: Theory and verification in a physical scale model: Geophysics,64, 888–901, doi: 10.1190/1.1444597.
Pratt, R. G., and M. H. Worthington, 1990, Inverse theory applied to multi-source cross-hole tomography. Part I: Acoustic wave-equation method:Geophysical Prospecting, 38, 287–310, doi: 10.1111/j.1365-2478.1990.tb01846.x.
Prieux, V., R. Brossier, Y. Gholami, S. Operto, J. Virieux, O. Barkved, and J.Kommedal, 2011, On the footprint of anisotropy on isotropic full wave-form inversion: The Valhall case study: Geophysical Journal International,187, 1495–1515, doi: 10.1111/j.1365-246X.2011.05209.x.
Prieux, V., R. Brossier, S. Operto, and J. Virieux, 2013a, Multiparameter fullwaveform inversion of multicomponent OBC data from Valhall. Part 1:Imaging compressional wavespeed, density and attenuation: GeophysicalJournal International, 194, 1640–1664, doi: 10.1093/gji/ggt177.
Prieux, V., G. Lambaré, S. Operto, and J. Virieux, 2013b, Building startingmodel for full waveform inversion from wide-aperture data by stereoto-mography: Geophysical Prospecting, 61, 109–137, doi: 10.1190/1.3513942.
Robertsson, J., J. Blanch, and W. Symes, 1994, Viscoelastic finite-differencemodeling: Geophysics, 59, 1444–1456, doi: 10.1190/1.1443701.
Sava, P., and S. Fomel, 2006, Time-shift imaging condition in seismic mi-gration: Geophysics, 71, no. 6, S209–S217, doi: 10.1190/1.2338824.
Shen, X., 2014, Early-arrival waveform inversion for near-surface velocityestimation: Ph.D. thesis, Stanford University.
Sheng, J., A. Leeds, M. Buddensiek, and G. T. Schuster, 2006, Early arrivalwaveform tomography on near-surface refraction data: Geophysics, 71,no. 4, U47–U57, doi: 10.1190/1.2210969.
Shipp, R. M., and S. C. Singh, 2002, Two-dimensional full wavefield inver-sion of wide-aperture marine seismic streamer data: Geophysical JournalInternational, 151, 325–344, doi: 10.1046/j.1365-246X.2002.01645.x.
Sirgue, L., 2006, The importance of low frequency and large offset in wave-form inversion: 68th Annual International Conference and Exhibition,EAGE, Extended Abstracts, A037.
Sirgue, L., O. I. Barkved, J. Dellinger, J. Etgen, U. Albertin, and J. H. Kom-medal, 2010, Full waveform inversion: The next leap forward in imagingat Valhall: First Break, 28, 65–70, doi: 10.3997/1365-2397.2010012.
Sirgue, L., and R. G. Pratt, 2004, Efficient waveform inversion and imaging:A strategy for selecting temporal frequencies: Geophysics, 69, 231–248,doi: 10.1190/1.1649391.
Staal, X., 2015, Combined imaging and velocity estimation by joint migra-tion inversion: Ph.D. thesis, Delft University of Technology.
Sun, D., and W. W. Symes, 2012, Waveform inversion via nonlinear differ-ential semblance optimization: 82nd Annual International Meeting, SEG,Expanded Abstracts, doi: 10.1190/segam2012-1190.1.
Symes, W. W., and J. J. Carazzone, 1991, Velocity inversion by differentialsemblance optimization: Geophysics, 56, 654–663, doi: 10.1190/1.1443082.
Taillandier, C., M. Noble, H. Chauris, and H. Calandra, 2009, First-arrivaltravel time tomography based on the adjoint state method: Geophysics,74, no. 6, WCB1–WCB10, doi: 10.1190/1.3250266.
Tarantola, A., 1984, Inversion of seismic reflection data in the acousticapproximation: Geophysics, 49, 1259–1266, doi: 10.1190/1.1441754.
Thierry, P., S. Operto, and G. Lambaré, 1999, Fast 2D ray-Born inversion/migration in complex media: Geophysics, 64, 162–181, doi: 10.1190/1.1444513.
van Leeuwen, T., and W. A. Mulder, 2010, A correlation-based misfit cri-terion for wave-equation traveltime tomography: Geophysical JournalInternational, 182, 1383–1394, doi: 10.1111/j.1365-246X.2010.04681.x.
Virieux, J., and S. Operto, 2009, An overview of full waveform inversion inexploration geophysics: Geophysics, 74, no. 6, WCC1–WCC26, doi: 10.1190/1.3238367.
Wang, F., 2015, Waveform inversion based on wavefield decomposition: Ph.D. thesis, École nationale supérieure des Mines de Paris.
Wang, H., S. Singh, F. Audebert, and H. Calandra, 2015, Inversion of seis-mic refraction and reflection data for building long-wavelengths velocitymodels: Geophysics, 80, no. 2, R81–R93, doi: 10.1190/geo2014-0174.1.
Wang, S., F. Chen, H. Zhang, and Y. Shen, 2013, Reflection-based fullwaveform inversion (RFWI) in the frequency domain: 83rd AnnualInternational Meeting, SEG, Expanded Abstracts, 877–881.
Warner, M., and L. Guasch, 2014, Adaptative waveform inversion — FWIwithout cycle skipping — Theory: 76th Annual International Conferenceand Exhibition, EAGE, Extended Abstracts, We E106 13, doi: 10.3997/2214-4609.20141092.
Wu, R. S., and M. N. Toksöz, 1987, Diffraction tomography and multisourceholography applied to seismic imaging: Geophysics, 52, 11–25, doi: 10.1190/1.1442237.
Wu, Z., and T. Alkhalifah, 2015, Simultaneous inversion of the backgroundvelocity and the perturbation in full-waveform inversion: Geophysics, 80,no. 6, R317–R329, doi: 10.1190/geo2014-0365.1.
Xu, S., D. Wang, F. Chen, G. Lambaré, and Y. Zhang, 2012, Inversion onreflected seismic wave: 82nd Annual International Meeting, SEG, Ex-panded Abstracts, doi: 10.1190/segam2012-1473.1.
Yang, D., F. Liu, S. Morton, A. Malcom, and M. Fehler, 2016a, Time-lapsefull-waveform inversion with ocean-bottom-cable data: Application onValhall field: Geophysics, 81, no. 4, R225–R235, doi: 10.1190/geo2015-0345.1.
Yang, P., R. Brossier, L. Métivier, and J. Virieux, 2016b, A review on thesystematic formulation of 3D multiparameter full waveform inversion inviscoelastic medium: Geophysical Journal International, 207, 129–149,doi: 10.1093/gji/ggw262.
Yang, T., and P. Sava, 2011, Wave-equation migration velocity analysis withtime-shift imaging: Geophysical Prospecting, 59, 635–650, doi: 10.1111/j.1365-2478.2011.00954.x.
Yilmaz, Ö., 1987, Seismic data processing: SEG.Zhou, H., L. Amundsen, and G. Zhang, 2012, Fundamental issues in fullwaveform inversion: 82nd Annual International Meeting, SEG, ExpandedAbstracts, doi: 10.1190/segam2012-0878.1.
Zhou, W., R. Brossier, S. Operto, and J. Virieux, 2015, Full waveform in-version of diving and reflected waves for velocity model building withimpedance inversion based on scale separation: Geophysical JournalInternational, 202, 1535–1554, doi: 10.1093/gji/ggv228.
JFWI real application R157