Embed Size (px)
Citation preview
VECON(VEhicle COntrol and Navigation)VEhicle COntrol and Navigation)
An After Seismic Disaster ApplicationAn After Seismic Disaster Application
Laboratory of GeodesyLaboratory of Geodesy
Aristotle University of Thessaloniki, Department of Aristotle University of Thessaloniki, Department of Civil EngineeringCivil Engineering
Prof. P. Savvaidis - Ass. Prof. I. Ifadis - Prof. P. Savvaidis - Ass. Prof. I. Ifadis -
Dr. K. LakakisDr. K. Lakakis
Continuous Updating about which vehicles are available and what are their positions.
Knowledge about the Street Network of service area.
Knowledge about the Travel Cost of street segments.
Optimum combination of the previous three demands to achieve the optimum choice of the Responding Vehicle.
Ability of Continuous Communication among Operation Center and vehicles.
Ability of Alternative Traffic Paths when some streets are closed - Real Time Procedure.
Emergency Vehicle FleetsEmergency Vehicle Fleets “major demands”
Continuous information of available vehicles and their positions.
Knowledge about the Street Network of service area and Ability to scout changes.Ability to scout changes.
Ability of a very quick adaptation to new conditions of Traffic Cost of street Ability of a very quick adaptation to new conditions of Traffic Cost of street segments.segments.
Optimum combination of the three previous demands to achieve the optimum choice of the Responding Vehicle.
Ability of Continuous Communication among Operation Center and vehicles.
Ability of Alternative Traffic Paths when some streets are closed - Real Time Ability of Alternative Traffic Paths when some streets are closed - Real Time Procedure. Procedure.
In the Case of a Seismic DisasterIn the Case of a Seismic Disaster
Some Some major demands become more emergent
In this paper we work on the previous In this paper we work on the previous “red”“red” major demands
How can we scout the traffic changes as How can we scout the traffic changes as soon as possible ? soon as possible ?
What kind of traffic data we ‘ll use ?What kind of traffic data we ‘ll use ?
The main questions are:The main questions are:
The answers The answers
are:are:
VeconVecon is a :
traffic scouting & predicting system, traffic scouting & predicting system,
real-time,real-time,
which provides precise urban navigationwhich provides precise urban navigation
Vecon Vecon Basic ElementsBasic Elements
(Real Time) Kinematic Differential (Real Time) Kinematic Differential
G.P.SG.P.SG.I.S - Graph TheoryG.I.S - Graph Theory
Position and Traffic Data(Travel Times)Position and Traffic Data(Travel Times)
Regression and Time Series ModelsRegression and Time Series Models
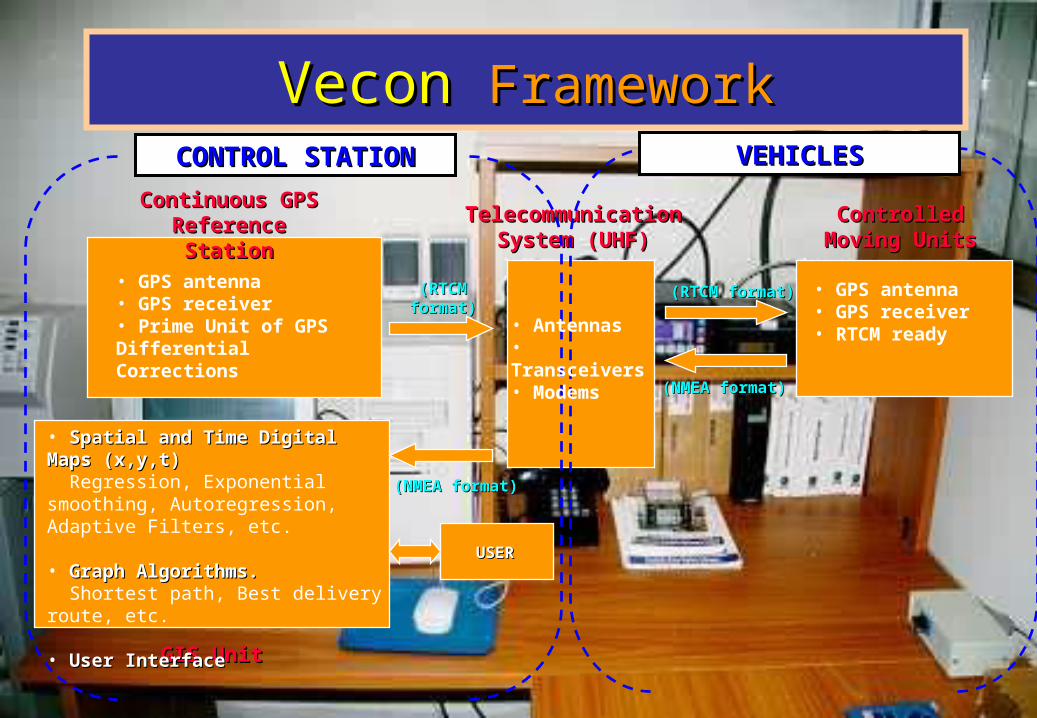
Continuous GPS Continuous GPS Reference StationReference Station Controlled Moving Controlled Moving
UnitsUnitsTelecommunication System Telecommunication System
((UHF)UHF)
GIS UnitGIS Unit
CONTROL STATIONCONTROL STATION VEHICLESVEHICLES
• GPS antenna• GPS receiver• Prime Unit of GPS Differential Corrections
• GPS antenna• GPS receiver• RTCM ready• Antennas
• Transceivers• Modems
• Spatial and Time Digital Maps (x,y,t)Spatial and Time Digital Maps (x,y,t) Regression, Exponential smoothing, Autoregression, Adaptive Filters, etc.
• Graph Algorithms.Graph Algorithms. Shortest path, Best delivery route, etc.
• User InterfaceUser Interface
USERUSER
(ΝΜΕΑ (ΝΜΕΑ format)format)
(ΝΜΕΑ (ΝΜΕΑ format)format)
(RTCM (RTCM format)format)(RTCM (RTCM format)format)
Vecon Vecon FrameworkFramework
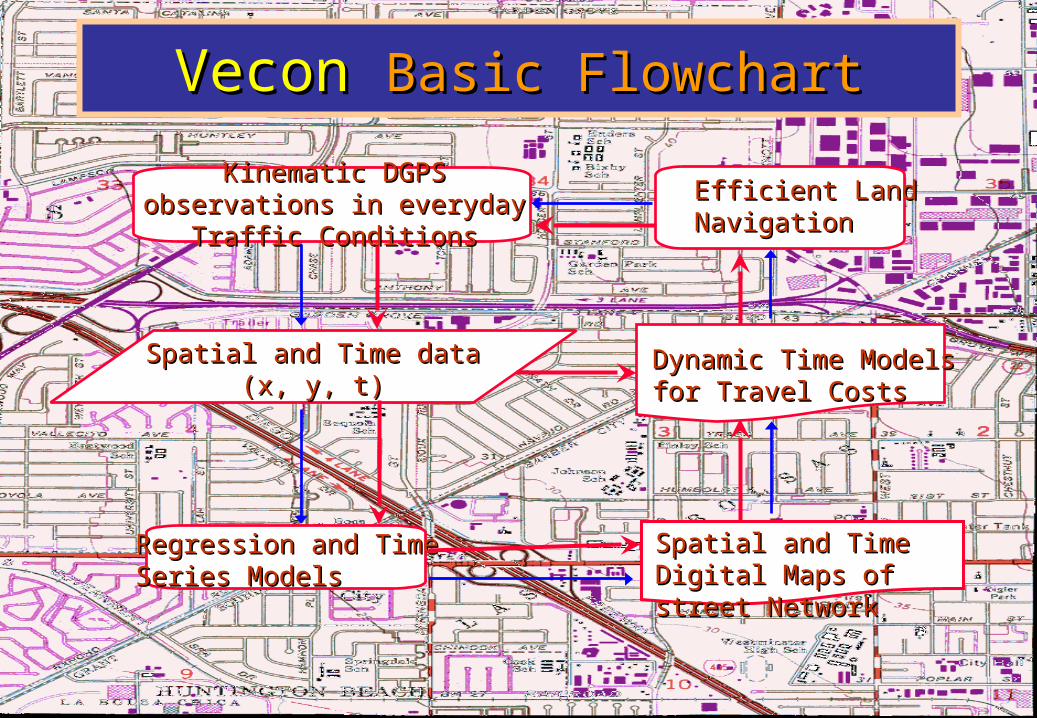
Vecon Vecon Basic FlowchartBasic Flowchart
Kinematic DGPS Kinematic DGPS observations in everyday observations in everyday
Traffic ConditionsTraffic Conditions
Spatial and Time data (x, y, Spatial and Time data (x, y, t)t)
Regression and Time Regression and Time Series ModelsSeries Models
Spatial and Time Spatial and Time Digital Maps of street Digital Maps of street NetworkNetwork
Dynamic Time Models Dynamic Time Models for Travel Costsfor Travel Costs
Efficient Land Efficient Land NavigationNavigation
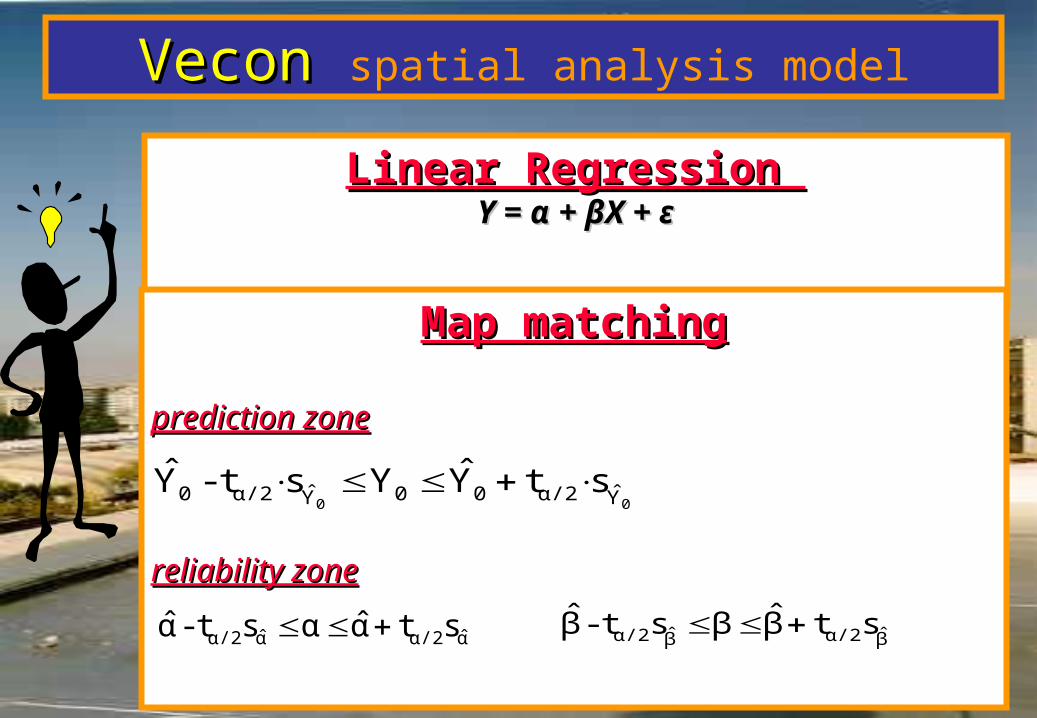
Linear Regression Linear Regression Υ = Υ = α + βα + βX + εX + ε
VeconVecon spatial analysis model
Map matchingMap matching
prediction zoneprediction zone
reliability zonereliability zone
αα/2αα/2 s tααs t-α βα/2βα/2 s tββs t-β
00 Yα/200Yα/20 stYYst-Y
Experimental Documentation of Experimental Documentation of SpatialSpatial Digital Map Digital Map Development MethodDevelopment Method
The regression models errors approached very well the normal The regression models errors approached very well the normal distribution, when we had statistical sample (distribution, when we had statistical sample (n>28). n>28).
The regression models Υ to Χ and Χ to Υ were same in practical The regression models Υ to Χ and Χ to Υ were same in practical level.level.
On 90% of the occasions the predictive accuracy (On 90% of the occasions the predictive accuracy (prediction zone)prediction zone) of of regression models was about 1.5m. On the others 10% we had an regression models was about 1.5m. On the others 10% we had an accuracy about 5.5m.accuracy about 5.5m.
A one pass linear regression model was more reliable and accurate, A one pass linear regression model was more reliable and accurate, than a cumulative (use the sum of passes) one. than a cumulative (use the sum of passes) one.
We suggest to choose the first one-pass model, that has the better We suggest to choose the first one-pass model, that has the better predictive accuracy (smaller prediction zone), than the predictive predictive accuracy (smaller prediction zone), than the predictive accuracy of the cumulative model, at the same time.accuracy of the cumulative model, at the same time.
Simple Exponential SmoothingSimple Exponential SmoothingΥt+1 = αtXt + (1-αt) Υt
VeconVecon time series models
Autoregressive ModelAutoregressive ModelYt
= φ1Υi-1 + φ2Υi-2 + ………. + φρYi-ρ + et
Experimental Documentation of Experimental Documentation of TimeTime Digital Map Digital Map Development MethodDevelopment Method
The high variances, which observed to street segment (arc) travel-times, decreased substantially when we examined the variances of entire route travel-times.
After the examination of different values of factor a, the simple (one factor) expontetial model proved not suitable.
The autoregressive model gave us encouraging results. Although we had high standard deviations, the rate of adjusted R square, the Durbin Watson values and the examination of autocorrelation charts suggest the use of the autoregressive model, with the note to use samples as big as possible.
When we have small (but statistically enough) samples, the time series model that we suggest is moving average model, not because of its better performances, but because of its simplicity.
CONCLUSIONSCONCLUSIONS
• VECONVECON is an autonomous VEhicle COntrol and Navigation is an autonomous VEhicle COntrol and Navigation system, which can create its necessary Spatial and Time system, which can create its necessary Spatial and Time data.data.
• VECONVECON is a Dynamic System, which updates and optimizes is a Dynamic System, which updates and optimizes its capabilities, every time we will decide to.its capabilities, every time we will decide to.
• VECONVECON system becomes much more useful, after a major system becomes much more useful, after a major urban disaster - like a Seismic Disaster - because of its Real-urban disaster - like a Seismic Disaster - because of its Real-Time Mobile Mapping and Timing capacities.Time Mobile Mapping and Timing capacities.
• VECONVECON system uses only three types of data (x,y,t), one system uses only three types of data (x,y,t), one observation resource (RTK-DGPS) and simple on-line observation resource (RTK-DGPS) and simple on-line processes. So we can say that it is as «real-time» as possible.processes. So we can say that it is as «real-time» as possible.
• VECON’ sVECON’ s expanding (to more vehicles) is an easy and not expanding (to more vehicles) is an easy and not expensive procedure.expensive procedure.