Embed Size (px)
Citation preview


VariablesVariablesn = number of spokes (here n= 6)
n
2
nn
,
After
Before

What are the possible What are the possible motions? motions?
1.1. Rocking to a stop on two spokesRocking to a stop on two spokes
2.2. Rolling down hill at a constant Rolling down hill at a constant speedspeed
3.3. Rolling down hill at ever increasing Rolling down hill at ever increasing speeds (for large slopes only)speeds (for large slopes only)
4.4. Swinging up and balancing on one Swinging up and balancing on one spoke (takes infinite time)spoke (takes infinite time)
1.1. Rocking to a stop on two spokesRocking to a stop on two spokes
2.2. Rolling down hill at a constant Rolling down hill at a constant speedspeed
3.3. Swinging up and balancing on one Swinging up and balancing on one spoke (takes infinite time)spoke (takes infinite time)

Why not?
2
2 2cos
mLIn
mLI
C
C
nLLZ
sin)sin(22
sin)sin(2
n
MgLEGain sin)sin(2
2222
2
1)1(
2
1
2
1 BBBLoss IIIE
nn

Balancing on one spokeBalancing on one spokeIf PE gain at vertical = KE after collision If PE gain at vertical = KE after collision
22
1cos1
BInMgL
UphillUphill
DownhilDownhilll
22
1cos1
BInMgL
0dn
0up

Notation ChangeNotation Change
sgn2
Z
ZZ

Balancing on one spokeBalancing on one spokeIf PE gain at vertical = KE after collision If PE gain at vertical = KE after collision
22
1cos1
BInMgL
UphillUphill
DownhilDownhilll
22
1cos1
BInMgL 0dn
0upZn
up
cos12 0Zup
Zn
dn
cos12 0Zdn

Next two casesNext two cases
1.1. Rocking to a stop on two spokesRocking to a stop on two spokes
2.2. Rolling down hill at a constant Rolling down hill at a constant speedspeed
Theta repeatsTheta repeats Omega tells us all we need to knowOmega tells us all we need to know

Poincaré Map Poincaré Map If a system has a repeating variable, If a system has a repeating variable,
keep track of the value of the other keep track of the value of the other variables every time that variable variables every time that variable repeats.repeats.
Since after each collision theta takes Since after each collision theta takes the same value, our mapping will be the same value, our mapping will be a mapping of angular velocity from a mapping of angular velocity from after collision n to after collision n+1after collision n to after collision n+1
nn
nn
ZfZ
g
1
1

Three sections of the mapThree sections of the map
ndn
upn
dnn
up
Rolling downhillRolling downhill
Rolling uphillRolling uphill
Reversing directionReversing direction

Can’t get over vertical Can’t get over vertical
The wheel will hit the ground with exactly The wheel will hit the ground with exactly the same speed as what it left the ground the same speed as what it left the ground with, just in the opposite direction.with, just in the opposite direction.
nn
1
We already have a mapping from We already have a mapping from before to after collisionsbefore to after collisions nn
Combining themCombining them
nn 1 nn ZZ 2
1

Can get over verticalCan get over vertical
1.1. Use conservation of energy to map Use conservation of energy to map from after one collision to just from after one collision to just before the next collisionbefore the next collision
2.2. Combine this with the mapping we Combine this with the mapping we have from before to after collisions have from before to after collisions to get a mapping from after to afterto get a mapping from after to after

Can get over vertical (part Can get over vertical (part 1)1)
DownhillDownhill
UphillUphill
nMgLII nBnB
sin)sin(22
1
2
1 22
1
nMgLII nBnB
sin)sin(22
1
2
1 2
1
2
upn
ndn
nZZ nn
sin)sin(41
ndn ZZ
nZZ nn
sin)sin(41
ZZ upn
nZZ nn
sin)sin(41
ZZ upn
ndn ZZ

Combine Combine
WithWith
YieldsYields
Can get over vertical (part Can get over vertical (part 2)2)
nZZ nn
sin)sin(41
nn ZZ 2
nZZ nn
sin)sin(421
ZZ upn
ndn ZZ

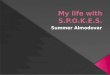
Graphical Representation (Fig 7)

Fixed PointsFixed Points
Should be one for each section Should be one for each section
Stopped on two spokesStopped on two spokes
Constant rolling speedConstant rolling speed
nn ZZ 21
n
ZZ nn
sin)sin(421
** )( ZZf
0* Z
2
2
*
1
sin)sin(4
n
Z

Stability of Fixed PointsStability of Fixed PointsA fixed point of a map A fixed point of a map
is stable if is stable if
nn ZfZ 1*Z
1)( *
ZZ
f
nn ZZ 21
Rocking to a Rocking to a stopstop
Constant rolling Constant rolling speedspeed
n
ZZ nn
sin)sin(421
2* )(
ZZ
f 2* )(
ZZ
f
Both Stable!Both Stable!
1
2cos
2
2
mLI
nmLI
C
C

Time for some MatLabTime for some MatLab

Existence of fixed pointsExistence of fixed points
When they exist they are stable, but When they exist they are stable, but do they always exits?do they always exits?
For some n and alpha, could they not For some n and alpha, could they not exist?exist?

Stopped on two spokesStopped on two spokes
Intuition tells us that as long as slope Intuition tells us that as long as slope is not too large, this fixed point is not too large, this fixed point should exist.should exist.
As long as the CG is located between As long as the CG is located between the two resting spokesthe two resting spokes
n

Continuous RollingContinuous Rolling
Intuition tells us that as long as slope Intuition tells us that as long as slope is large enough, this fixed point will is large enough, this fixed point will exits. But how large is large enough?exits. But how large is large enough?

Continuous Rolling (Math)Continuous Rolling (Math)Might be a bit too tough at first. How about as Might be a bit too tough at first. How about as
long as the value of the fixed point for rolling long as the value of the fixed point for rolling is greater than the vertical standing speed.is greater than the vertical standing speed.
ZZ dnlc *
Results in the following expression (Eq. 22)Results in the following expression (Eq. 22)
0)sin(sin1
1)cos(cos1
2
2
nn
Case when exactly equal defines Case when exactly equal defines c

How about when for How about when for
Continuous Rolling Continuous Rolling (Intuition)(Intuition)
LossGain EE dn
BInMgL
2
1)1(sin)sin(2 2
BInMgL
2
1)1(sin)sin(2
2
2
Use the fact that Use the fact that 22
1cos1 dn
BInMgL
nn
cos1
)1(sin)sin(2
2
2
Case when exactly equal defines Case when exactly equal defines c

Existence of fixed pointsExistence of fixed points
Stopped on two spokesStopped on two spokes
Constant rolling speedConstant rolling speed *Zlc
*Zstp
2
c
n
0

n
c

Basins of attractionBasins of attraction
Which IC’s get mapped to which fixed Which IC’s get mapped to which fixed point?point?
Some are mapped to the rocking to a Some are mapped to the rocking to a stop fixed point while some get mapped stop fixed point while some get mapped to the constant rolling fixed point.to the constant rolling fixed point.
Very few are mapped to vertical Very few are mapped to vertical balancingbalancing

Regions which are mapped to the Regions which are mapped to the stopped fixed point and regions stopped fixed point and regions which are mapped to the rolling fixed which are mapped to the rolling fixed point are separated by points which point are separated by points which get mapped to vertical balancing get mapped to vertical balancing positions.positions.
Basins of attractionBasins of attraction

The vertical boundary pointsThe vertical boundary points
Zn
up
cos12 Zn
dn
cos12
The balancing speeds after impactThe balancing speeds after impact
Any IC which eventually gets mapped Any IC which eventually gets mapped to one of these velocities will be a to one of these velocities will be a boundary between the different boundary between the different basins of attraction.basins of attraction.

Notation TimeNotation Time
Initially rolling downhill and ending up Initially rolling downhill and ending up balancing. (only for very small slopes)balancing. (only for very small slopes)
Initially rolling uphill and balancing on Initially rolling uphill and balancing on an uphill rotation.an uphill rotation.
Initially rolling uphill and balancing on Initially rolling uphill and balancing on a downhill rotation.a downhill rotation.
mdnZ
mupZ
mupZ

Backwards Mapping

All three sequencesAll three sequences

Graphical Representation

Final Results!Final Results!