Embed Size (px)
Citation preview

Faculty of Science, Technology andCommunication
Master in Information and Computer Sciences
Metaheuristics for Optimal Transfer of P2PInformation in VANETs
AuthorJamal Toutouh El Alamin
SupervisorPascal Bouvry
UNIVERSITY OF LUXEMBOURG


Acknowledgements
My sincere thanks to my advisor, Dr. Pascal Bouvry, for his support and guidancethroughout the Master Thesis work; the Computer Science and Communicationsresearch unit colleges, for sharing their knowledge with me; and the University ofLuxembourg, for offering me the opportunity of presenting this Master Thesis.
I also would like to make a special reference to my family; my parents Sakinaand Ahmed, and my brothers Abdeslam, Mohamed, and Said; for working with meto make our dreams come true.
I am deeply indebted to my girlfriend, Rosa, who has borne up the whole processwhich finishes with this Master Thesis.
I cannot go without mentioning Networking and Emerging Optimization researchunit at University of Málaga, specially its head Dr. Enrique Alba, for introducingme to the wonderful world of scientific research.
Moreover, I have to thank to my friends for the great times that we have spenttogether and their support, specially to the Neudorfers.
3


Metaheuristics for Optimal Transfer ofP2P Information in VANETs
Master in Information and Computer Sciences
Jamal Toutouh El [email protected]
June 8, 2010

2

Contents
1 Introduction 9
2 VANET Networks 132.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2 VANET Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . 162.3 Wireless Access Technologies . . . . . . . . . . . . . . . . . . . . . . . 17
2.3.1 Ad-hoc Network Technologies . . . . . . . . . . . . . . . . . . 172.3.2 Cellular Technoligies . . . . . . . . . . . . . . . . . . . . . . . 21
2.4 Routing Protocols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.4.1 Communication Patterns . . . . . . . . . . . . . . . . . . . . . 232.4.2 Routing Protocols Classification . . . . . . . . . . . . . . . . . 232.4.3 Routing Protocols for VANETs . . . . . . . . . . . . . . . . . 25
2.5 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.5.1 Safety-related Applications . . . . . . . . . . . . . . . . . . . . 312.5.2 Transportation Efficiency Applications . . . . . . . . . . . . . 322.5.3 Information and Entertainment Applications . . . . . . . . . . 33
2.6 Simulation of VANETs . . . . . . . . . . . . . . . . . . . . . . . . . . 332.6.1 VANET Simulation Alternatives . . . . . . . . . . . . . . . . . 342.6.2 VanetMobiSim/Ns-2 Simulator . . . . . . . . . . . . . . . . . 35
2.7 Research Challenges in VANETs . . . . . . . . . . . . . . . . . . . . . 36
3 Metaheuristics 393.1 Definition of Metaheuristic . . . . . . . . . . . . . . . . . . . . . . . . 393.2 Metaheuristics Classification . . . . . . . . . . . . . . . . . . . . . . . 43
3.2.1 Trajectory-based Metaheurístics . . . . . . . . . . . . . . . . . 443.2.2 Population-based Metaheurístics . . . . . . . . . . . . . . . . . 47
3.3 Algorithms used in this Work . . . . . . . . . . . . . . . . . . . . . . 493.3.1 Simulated Annealing (SA) . . . . . . . . . . . . . . . . . . . . 503.3.2 Genetic Algorithm (GA) . . . . . . . . . . . . . . . . . . . . . 52
3

CONTENTS
3.3.3 Evolutionary Strategies (ES) . . . . . . . . . . . . . . . . . . . 573.3.4 Particle Swarm Optimization (PSO) . . . . . . . . . . . . . . 593.3.5 Differential Evolution (DE) . . . . . . . . . . . . . . . . . . . 62
4 VDTP Protocol Optimization Problem 654.1 File Transfer in VANETs . . . . . . . . . . . . . . . . . . . . . . . . . 654.2 VDTP Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.2.1 VDTP Protocol Operation . . . . . . . . . . . . . . . . . . . . 674.2.2 VDTP Protocol Configuration . . . . . . . . . . . . . . . . . . 69
4.3 OFTC Problem Definition . . . . . . . . . . . . . . . . . . . . . . . . 704.3.1 Search Space . . . . . . . . . . . . . . . . . . . . . . . . . . . 704.3.2 Fitness Function . . . . . . . . . . . . . . . . . . . . . . . . . 71
5 Experiments 735.1 Optimization Framework . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.1.1 Instances: VANET Scenarios . . . . . . . . . . . . . . . . . . . 745.1.2 Algorithms Parameter Settings . . . . . . . . . . . . . . . . . 77
5.2 Software and Hardware Tools . . . . . . . . . . . . . . . . . . . . . . 785.2.1 MALLBA Library . . . . . . . . . . . . . . . . . . . . . . . . . 785.2.2 Optimizing VDTP by using VanetMobiSim/Ns-2 . . . . . . . 795.2.3 Parallel Executions by using Condor . . . . . . . . . . . . . . 81
5.3 Used Metrics to compare Results . . . . . . . . . . . . . . . . . . . . 83
6 Results 856.1 Global Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 856.2 Algorithms Performance Study . . . . . . . . . . . . . . . . . . . . . 886.3 VANET QoS Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . 91
7 Conclusions and Future Work 957.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 957.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
A Detailed Numerical Results 99A.1 Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99A.2 Final Execution Times . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Bibliografy 109
4

List of Tables
2.1 Current bluetooth classes . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2 Features of wireless network technologies proposed to deploy VANETs. 21
2.3 Main features of routing protocols applied on VANETs. . . . . . . . . 26
5.1 VANET instance specification . . . . . . . . . . . . . . . . . . . . . . 76
5.2 Parameterization of SA optimization algorithm. . . . . . . . . . . . . 77
5.3 Parameterization of PSO optimization algorithm. . . . . . . . . . . . 77
5.4 Parameterization of GA, ES, and DE optimization algorithms. . . . . 78
6.1 Final fitness values for both VANET scenarios and the five optimiza-tion algorithms. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
6.2 KS-test results for the five algorithms and two scenarios. . . . . . . . 87
6.3 Friedman Rank test with confidence level 95% . . . . . . . . . . . . . 88
6.4 Mean execution time (seconds) per independent run of each algorithmfor both, urban and highway, scenarios. . . . . . . . . . . . . . . . . . 90
6.5 Optimal configurations achieved in the median execution and theCARLINK experts one for VDTP protocol and simulation values inurban scenario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
6.6 Optimal configurations achieved in the median execution and theCARLINK experts one for VDTP protocol and simulation values inhighway scenario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
A.1 Results obtained by simulating in urban scenario the PSO configura-tion (chunk_size=41358, timeout=10.00000, max_attempts=3). . . . 100
A.2 Results obtained by simulating in urban scenario the DE configura-tion (chunk_size=23433, timeout=8.00000, max_attempts=10). . . . 100
A.3 Results obtained by simulating in urban scenario the GA configura-tion (chunk_size=31196, timeout=3.83673, max_attempts=9). . . . 101
5

LIST OF TABLES
A.4 Results obtained by simulating in urban scenario the ES configuration(chunk_size=28278, timeout=6.00000, max_attempts=9). . . . . . . 101
A.5 Results obtained by simulating in urban scenario the SA configuration(chunk_size=19756, timeout=6.43308, max_attempts=3). . . . . . . 102
A.6 Results obtained by simulating in urban scenario the CARLINK con-figuration [24] (chunk_size=25600, timeout=8.0, max_attempts=8). 102
A.7 Results obtained by simulating in highway scenario the PSO config-uration (chunk_size=29257, timeout=6.42140, max_attempts=9). . . 103
A.8 Results obtained by simulating in highway scenario the DE configu-ration (chunk_size=19810, timeout=6.91179, max_attempts=8). . . 103
A.9 Results obtained by simulating in highway scenario the GA configu-ration (chunk_size=34542, timeout=9.54986, max_attempts=10). . . 104
A.10 Results obtained by simulating in highway scenario the ES configu-ration (chunk_size=38490, timeout=8.15197, max_attempts=12). . . 104
A.11 Results obtained by simulating in highway scenario the SA configu-ration (chunk_size=32002, timeout=8.21363, max_attempts=4). . . 105
A.12 Results obtained by simulating in highway scenario the CARLINKconfiguration (chunk_size=25600, timeout=8.0, max_attempts=8). . 105
A.13 Execution time in seconds for the algorithms to find the best solution(Best sol.) and to finish the whole process (Total) solving the OFTCproblem in the urban scenario. Each row indicates an independentrun of 30 (#). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
A.14 Execution time in seconds for the algorithms to find the best solution(Best sol.) and to finish the whole process (Total) solving the OFTCproblem in the highway scenario. Each row indicates an independentrun of 30 (#). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
6

List of Figures
1.1 VANET use case: Warn of obstacle in the road. . . . . . . . . . . . . 10
2.1 Example of a MANET network. . . . . . . . . . . . . . . . . . . . . . 142.2 Example of a VANET application: Warning of a traffic accident. . . . 152.3 Example of a VANET application: Warning of obstacles in the road. . 152.4 DSRC Channel assignment in North America. . . . . . . . . . . . . . 202.5 Accident warning by using GPRS. . . . . . . . . . . . . . . . . . . . . 212.6 Communication pattern representations. . . . . . . . . . . . . . . . . 242.7 Blind-Flooding protocol representation. . . . . . . . . . . . . . . . . . 262.8 CDS protocol representation with dominant nodes in black and pas-
sive nodes in white. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.9 Discovery procedure used by DSR routing protocol. . . . . . . . . . . 282.10 VANET application: Cooperative forward collision warning. . . . . . 312.11 VANET application: Approaching motorcycle warning. . . . . . . . . 322.12 VANET application: Publicity board podcasting of a cinema. . . . . . 332.13 VanetMobiSim/Ns-2 basic architecture. . . . . . . . . . . . . . . . . . 36
3.1 Optimization techniques classification. . . . . . . . . . . . . . . . . . 413.2 Operation of a typical SA. . . . . . . . . . . . . . . . . . . . . . . . . 503.3 Examples of gens encoding. . . . . . . . . . . . . . . . . . . . . . . . 533.4 Operation of a typical GA. . . . . . . . . . . . . . . . . . . . . . . . . 543.5 Widely used crossover operators. . . . . . . . . . . . . . . . . . . . . 553.6 Mutation operator over one gene. . . . . . . . . . . . . . . . . . . . . 563.7 Operation of a typical ES. . . . . . . . . . . . . . . . . . . . . . . . . 583.8 Particle movement from point xi
g to point xig+1 in the search space
(PSO). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.1 Information requesting phase of VDPT protocol. . . . . . . . . . . . . 674.2 General operation during data requesting phase of VDTP protocol. . . 68
7

LIST OF FIGURES
4.3 VDTP operation with lost packets. . . . . . . . . . . . . . . . . . . . 684.4 Basic structure of VDPT packet. . . . . . . . . . . . . . . . . . . . . 69
5.1 Optimization framework for VDTP configuration in VANETs, wherethe algorithms invoke the ns-2 simulator for each solution evaluation. 74
5.2 Selected areas of Málaga for our VANET simulations. . . . . . . . . . 755.3 Málaga areas representation by using VanetMobiSim for their simu-
lation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 765.4 Common design of Mallba skeletons. . . . . . . . . . . . . . . . . . . 795.5 Classes developed to simulate VDTP in ns-2. . . . . . . . . . . . . . . 80
6.1 Median fitness performance in urban scenario. . . . . . . . . . . . . . 896.2 Median fitness performance in highway scenario. . . . . . . . . . . . . 896.3 Effective transmission data rates (throughput) in Kbps achieved dur-
ing the simulations of the final VDTP configurations in comparisonwith values given by human expert configurations of CARLINK con-sortium. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
8

Chapter 1
Introduction
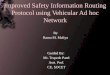
For people living in developed countries the sheer volume of road traffic can be adaily nuisance. In addition, the road traffic conditions affect the safety of the popu-lation since 1.2 million people worldwide are estimated to be killed each year on theroads1. For this reason, nowadays the automotive industry and governments investmany resources to increase road safety and traffic efficiency, as well as to reduce theimpact of transportation on the environment. The application of communicationsand information technologies for this purpose has opened a new range of possibili-ties. One of the most promising areas of research is the study of the communicationsamong vehicles and road-side units, or more specifically the Vehicular Ad-hoc Net-works (VANET) [58]. This kind of networks are self-configuring networks composedof a collection of vehicles and elements of roadside infrastructure connected witheach other without requiring an underlying infrastructure, sending and receivinginformation and warnings about the current traffic situation (see Figure 1.1).
Nowadays, WiFi (IEEE 802.11 based) technologies are the most commonly usedfor deploying VANETs. The vehicles are equipped with wireless network interfaceswhich use either IEEE 802.11b or IEEE 802.11g standards for access media. How-ever, these are general purpose standards and they do not fit properly the require-ments of high dynamic networks such as VANETs. Currently, DSRC (DedicatedShort-Range Communicatio) [108] has been proposed as the communications stan-dard specifically for VANETs, it is a short medium range communications servicethat offers very low latency and high data rate. DSRC is based upon the standardsIEEE 802.11p and IEEE 1609 family.
1According to "Global Road Safety Fact File" of FIA Foundation
9

CHAPTER 1. INTRODUCTION
Figure 1.1: VANET use case: Warn of obstacle in the road.
The use of IEEE 802.11 (not cellular) standards implies that vehicles commu-nicate within a limited range while moving, thus exhibiting a topology that maychange quickly and in unpredictable ways. In such kind of networks, previous to itsdeployment, it is crucial to provide the user with an optimal configuration of thecommunication protocols in order to increase the effective data packet exchange, aswell as to reduce the transmission time and the network usage (with their implica-tions on higher bandwidth and lower energy consumption). This is specially truein certain VANET scenarios in which buildings and distances discontinue communi-cation channels frequently, and where the available time for connecting to vehiclescould be really short.
The efficient protocol configuration for VANETs without using automatic in-telligent design tools is practically impossible because of the enormous number ofpossibilities (NP-problems). It is especially difficult (e.g., for a network designer)when considering multiple design issues, such as highly dynamic topologies and re-duced coverage. All this motivates the use of metaheuristic techniques [15] whicharises as well-suited tools to solve this kind of problems. Unfortunately, few relatedapproaches can be found in the specialized literature. In Alba et al. (2006) [5], aspecialized Cellular Multi-Objective Genetic Algorithm (cMOGA) was used for find-ing an optimal broadcasting strategy in urban Mobile Ah Hoc Networks (MANETs).Chiang et al. (2007) [33] developed an Ant Colony based model for resource man-agement in VANETs. More recently, in Dorronsoro et al. (2008) [40], six versionsof GAs (panmictic and descentralized) were evaluated and used in the design of adhoc injection networks.
10

In the present Thesis, we face the Optimal File Transfer protocol Configura-tion (OFTC) problem in VANETs, which deals with the optimization of VDTP(Vehicular Data Transport Protocol) [23], by means of five different state-of-the-art optimization techniques (metaheuristic algorithms). This problem lies in thecore of any VANET application, and thus optimal configuration is a major con-cern. Also, we face many optimization algorithms because this is a new field, andtheir relative advantages are still unclear. These algorithms are two swarm intel-ligence techniques: Particle Swarm Optimization (PSO) [70] and Differential Evo-lution (DE) [128]; two evolutionary algorithms: Genetic Algorithm (GA) [15] andEvolutionary Strategy (ES) [120]; and a trajectory search technique, Simulated An-nealing (SA) [73]. For our tests, two typical car-to-car environment instances havebeen defined: urban and highway scenarioss. We rely on a flexible simulation struc-ture using VanetMobiSim/Ns-2 [8] (realistic VANET simulator) for optimizing thetransmission time, the number of lost packets, and the amount of data transferred.One additional contribution of this work is to provide the specialist with a usefulplatform, embedded within ns-2, to configure network protocols and hence obtaininga fair QoS control in VANETs.
The remaining of this thesis is organized as follows:
• Chapter 2 provides an overview of the field of VANET networks summariz-ing the possible applications, applied technologies, and challenges. Also, weintroduce the state of the art in VANETs simulation.
• Chapter 3 presents different paradigms for solving optimization problems fo-cusing on the five metaheuristic algorithms used for solving the proposed prob-lem.
• Chapter 4 details the problem of optimizing the point-to-point informationtransfer using VDTP protocol in VANETs, ending with the OFTC problem.
• Chapter 5 presents the methodology used to solve the proposed problem.
• Chapter 6 shows the obtained results solving the optimization problem byusing the five different metaheuristics.
• Finally, Chapter 7 draws the conclusions and the future work from all theachievements mentioned in this Thesis.
11

CHAPTER 1. INTRODUCTION
In turn, we have included an appendix:
• Appendix A shows the tables of numerical results obtained during the opti-mization process.
12

Chapter 2
VANET Networks
This chapter provides an overview about state of the art in Vehicular Ad-hocNetworks (VANETs) since we have optimized Vehicular Data Transport Protocol(VDTP) used in this kind of networks. This chapter is organized as follows: First,Section 2.1 introduces the idea of VANET. Following, Section 2.2 presents the maincharacteristics of such networks. In turn, sections 2.3 and 2.4 summarizes the mainwireless access technologies and routing protocols used in VANETs. Section 2.5 lista representative set of proposed applications to exploit, and both, the main researchgroups and consortia, that work or have worked designing this kind of networks.Section 2.6 presents the problem of simulating VANETs and the proposed solutions.Finally, Section 2.7 provides an outline of challenges and future works that arise inthe networks that are presented in this chapter.
2.1 Introduction
Equipping vehicles with wireless communication devices is a subject that has inter-ested the research community and the automotive industry since 80’s [58]. Advancesin wireless networking technologies rise to the emergence of Mobile Ad-hoc Networks(MANETs). A MANET is a self-configuring network composed of a collection of in-dependent mobile wireless nodes connected with each other without requiring anunderlying infrastructure. Each node in a MANET is free to move independently inany direction, and therefore change their links frequently. Normally the nodes arepersonal computers or small mobile devices as personal digital assistants (PDAs),sensors, cell phones, etc. (see Figure 2.1).
13

CHAPTER 2. VANET NETWORKS
Figure 2.1: Example of a MANET network.
The main attraction with the MANET is its immediate and direct applicationto the real world, offering the possibility of accessing to a communication networkwhere for different reasons an infrastructure can not be installed. A very promisingand interesting example of such applications is the use of PDAs and MANET tech-nologies in emergency and rescue [117, 112], as it can be an area after an earthquakeor a major fire, where the communications infrastructure may have been damagedand unusable.
Soon, the research community and the automotive industry studied the appli-cation of MANET technologies to deploy networks among vehicles equipped withcertain mobile devices as GPS navigators or smart phones. From this work two dif-ferent technologies appeared: IVC (Inter-Vehicle Communications) and RVC (Road-Vehicle Communications). The first one enables vehicles to communicate with eachother and it is also known as communication V2V (Vehicle-to-Vehicle). RVC pro-vides communications between vehicles and the roadside units (RSU) that gatherand broadcast information, this kind of communication is also known as commu-nication V2I (Vehicle-to-Infrastructure). The union of IVC and RVC germinatedin what we understand today as Vehicular Ad-hoc Networks or VANETs (see Fig-ure 2.2).
Using this technology vehicles can communicate with each other to transmitdifferent kinds of information. The interchange of real time traffic information con-ditions among vehicles can make driving safer and more efficient, for this reason theresearch community is mainly working to develop such applications. For example,warning about the existence of an accident is useful for the drivers because theycan be able to reduce the speed and look for alternative routes before reaching theaccident area (see Figure 2.2).
14

2.1. INTRODUCTION
Figure 2.2: Example of a VANET application: Warning of a traffic accident.
The roadside elements such as road traffic signs or traffic lights typically justprovide visual information and usually with an unchanging pattern. However, withthe application of VANET technologies the roadside elements actings as RSU couldbe more active in informing users with personalized real-time information. Forexample, a dangerous curve sign could warn the driver of a vehicle traveling atexcessive speed before reaching it. Another example would be a men at work signalwhich may broadcast information about of the existence of road works, so thatdrivers would know their existence in advance (see Figure 2.3).
Figure 2.3: Example of a VANET application: Warning of obstacles in the road.
The term VANET was originally adopted to reflect the ad-hoc nature of thesehighly dynamic networks. However, because the term ad-hoc network was associatedwidely with unicast routing-related research, there is currently a debate among thepioneers of this field about redefining the acronym VANET to de-emphasize ad-hocnetworking [58]. Because this discussion has not yet reached consensus, VANET isthe term used to refer to vehicle-to-vehicle and vehicle-to-roadside communicationsbased on wireless local area networking technology.
15

CHAPTER 2. VANET NETWORKS
To deploy such kind of vehicular networks we need devices to perform bothtransmission and reception of information and to process it, some vehicles to achievethat include an electronic device called car PC. These devices must be equipped witha voice recognition system, since drivers can not use their hands to access the typicalhuman-computer interfaces such as keyboards or touch screens.
2.2 VANET Characteristics
VANET networks can be viewed as a subclass of MANETs where nodes are vehiclesor roadside infrastructure elements. However they behave fundamentally different.The mobility of their nodes is the main and most critical difference. The mobilityof vehicles (nodes) that belong to a VANET is influenced by driver behavior, con-straints on mobility (road restrictions), and high speeds. These characteristics haveimportant implications for design decisions in these networks.
The major characteristics of VANETs are presented following:
• Rapid changes in VANETs topology are difficult to manage. Due to highrelative speed between cars network’s topology changes very fast. Differentauthors have tried to find solutions to this problem for both highway scenar-ios [137, 56] and urban environments [93]. However these results can be appliedonly to those specific scenarios and not for both at the same time.
• VANET networks are subject to frequent fragmentation, so that messages havetroubles reaching their destination nodes. This issue remains open because,as the previous problem, the obtained results depend on the treated scenarios.Of course being connective for VANETs is not important for emergency safetymessages since while the network is not connected there is no problem in safetypoint of view.
• Such networks have small effective network diameter. We mainly due to thespeed, the high number of obstacles, and the height of the used antennae. Forthis reason links between nodes can be broken frequently.
• The devices used to deploy these networks have not significant power con-straints, unlike sensor and other types of mobile devices used in other kind ofMANETs where limited battery life is a major concern.
16

2.3. WIRELESS ACCESS TECHNOLOGIES
• The network density is variable because it depends highly on vehicular density.This may be high in some situations, for example, during rush hours at theentrance of major cities, or it can be light in low-traffic highway environments.
• The topology of the network could be affected by the response of the driversafter receiving messages. This means that the content of messages can changethe network topology.
2.3 Wireless Access Technologies
In this section we present several access standards that could be used for VANETsconnectivity. In general, the aim is to provide a set of air interfaces and parametersfor high speed vehicular communications using one or more available media. Notethat currently the WiFi (IEEE 802.11 based) technologies are the most commonlyused for connecting vehicles by different research groups and consortia involved inresearch and development of these networks [115, 133, 41].
Following, we present briefly several connection technologies that have been con-sidered to be used to deploy vehicular networks. We have defined two differentgroups: ad-hoc network (without any infrastructure) and cellular technologies.
2.3.1 Ad-hoc Network Technologies
The improvement of ad-hoc connection technologies has boosted the appearanceof VANET networks (see Section 2.1). Currently, it is being discussed the useof different technologies that do not require any infrastructure for development ofvehicular networks. Below, the most interesting ones are presented.
WiFi (Wireless Fidelity): Generally, WiFi refers to any type of IEEE 802.11wireless protocol. More specifically, WiFi is the industry standard for products de-fined by the WiFi Alliance1 and conforming to IEEE 802.11 standard [63]. WiFistandard defines over-the-air protocols necessary to support networking in a localarea and it specifies physical (PHY) and medium access control (MAC) layers.
There are several specifications in the IEEE 802.11 family which extends the orig-inal one (IEEE 802.11) that supports 1 or 2 Mbps transmission in the 2.4 GHz band.
1WiFi Alliance - http://www.wifialliance.org
17

CHAPTER 2. VANET NETWORKS
The most extended ones are the standards IEEE 802.11b and IEEE 802.11g, thatprovide 11 Mbps and 54 Mbps transmission in 2.4 GHz band with a maximum rangeof 500 m, respectively. Most of mobile devices, as PDAs, smart phones or laptops, areequipped with the necessary hardware to use these two standards. IEEE 802.11a isan extension to 802.11 that provides up to 54 Mbps in the 5GHz band using OFDM(Orthogonal Frequency Division Multiplexing) [135] encoding scheme. Transfer ratesincreased with IEEE 802.11n standard with a bandwidth up to 500 Mbps. In ad-dition, there are a number of other 802.11 WG activities that define inter accesspoint protocol (IEEE 802.11f), MAC enhancements for security (IEEE 802.11i),MAC enhancements for QoS (IEEE 802.11e), etc.
The main research groups have opted for the use of IEEE 802.11b for its strongpresence in the market. The results, which are being achieved by both simulationsand real tests, are quite encouraging [53].
WiMax (Worldwide Interoperability for Microwave Access): WiMax isanother standard developed by IEEE, the IEEE 802.16 [101]. It was defined asan alternative to cable and xDSL for providing wireless broadband access over longdistances. This kind of connections operates on licensed or unlicensed spectrum.A commonly-held misconception is that WiMAX can deliver 70 Mbps over 50 Km.However, WiMAX can either operate at higher bitrates or over longer distancesbut not both: operating at the maximum range of 50 Km increases bit error rateand thus results in a much lower bitrate. Conversely, reducing the range allowsa device to operate at higher bitrates. In [46], they measured the performance ofdifferent scenarios getting a maximum bandwidth of 20 Mbps and transmissions ata maximum distance of 6 Km. After publication of IEEE 802.16 standard in 2002,several revisions have emerged, in December 2005 appeared IEEE 802.16e specificfor mobile devices.
Bluetooth: Bluetooth technology (IEEE 802.15.1) [14] was originally developedby mobile phones company Ericsson2 in 1994. It is a short range radio communica-tion system designed as a wireless alternative to the serial communication RS-232(Recommended Standard 232) for communication of devices like mobile phones,PDAs, notebooks, PCs, headsets, etc. It should be cheap and low power consump-tion for easy implantation into mobile devices. This is currently the most widespreadcommunication technology for WPAN (Wireless Personal Area Networks). There
2Ericsson Website - http://www.ericsson.com
18

2.3. WIRELESS ACCESS TECHNOLOGIES
are three different classes of bluetooth according to their coverage and power (seeTable 2.1), getting transfer rates up to 3 Mbps and ranges up to 100 meters. Thesenetworks operate on a free frequency band using sufficiently robust security mecha-nisms.
Table 2.1: Current bluetooth classes
Class Maximum allowable power Coverage (approximate)Class 1 100 mW (20 dBm) 100 mClass 2 2.4 mW (4 dBm) 10 mClass 3 1 mW (0 dBm) 1 m
UWB (Ultra Wide Band): The UWB can be seen as an evolution of the blue-tooth that comes with the IEEE 802.15.3 standard. UWB is a radio technologythat can be used at very low power levels for short-range (10 m) high-bandwidth(> 500 MHz) communications by using a large portion of the radio spectrum. Itoffers transmission bitrates up to 480 Mbps [34]. One of the most important featureof UWB is the low power consumption.
ZigBee: ZigBee is based on the IEEE 802.15.4 standard [78] and it is the tech-nology used in ad-hoc WSN (Wireless Sensor Networks). It presents a fairly limitedbandwidth (250 Kbps) and a coverage up to 75 m. This technology is used mostly insystems where little information is transferred to very small distances. The greatestquality of ZigBee is that the power consumption is extremely low.
DSRC (Dedicated Short Range Communications): DSRC has been pro-posed as the communications standard for V2V and V2I communications links(PHY/MAC layers). More specifically, it is a short medium range communicationsservice that supports several applications requiring very low latency and high datarate. Nowadays, DSRC systems in Europe, Japan, and US are not compatible. In theUS DSRC will be based upon the standards IEEE 802.11p and IEEE 1609 family,and will use seven 10 MHz-wide channels in the 5.85-5.925 GHz bandwidth [108].IEEE 1609 is a higher layer standard on which IEEE 802.11p is based.
IEEE 802.11p standard was proposed as a modification of IEEE 802.11a by theASTM (American Society for Testing and Materials)3 to better match the vehicularenvironment. IEEE 802.11p is an extension to 802.11 in order to add Wireless Access
3ASTM Website - http://www.astm.org
19

CHAPTER 2. VANET NETWORKS
in the Vehicular Environment (WAVE). WAVE mode of operation allows data ex-change between vehicular devices in rapidly changing communication environments,where mobile nodes may move up to 200 Km/h and the distances between them arebetween 100 and 500 meters. In order to cope with very low latency VANET ap-plications, very short-duration communications exchanges are required. Regardingthe physical layer, 802.11p is very similar to 802.11a, 802.11p is also OFDM-based,with more emphasis on a reduced channel spacing (10 MHz instead of 20 MHz)to cope with the higher multi-path effect of urban environments. The data ratesranges are from 3 to 27 Mbps for each channel, because lower rates are preferredin order to obtain robust communication. The DSRC spectrum is structured intoseven channels (see Figure 2.4). Channel 178 is the control channel (CCH), which isrestricted to safety communications. The two channels at the ends of the spectrumband are reserved for special uses. The rest are service channels (SCH) available forboth safety and non-safety usage.
At MAC layer level, DSRC is based on access control provided by the CSMA/CA(Carrier Sense Multiple Access, Collision Avoidance), but modified to avoid the hid-den terminal problem. In order to achieve that, it implements the message exchangesRTS/CTS (Request-to-Send/Clear-to-send) [31]. This mechanism avoids collisionsbut introduces overload and delay transmissions. For this reason, it does not imple-ment RTS/CTS in the CCH channel.
Figure 2.4: DSRC Channel assignment in North America.
Table 2.2 presents the main features of the wireless ad-hoc network technologiespresented previously.
20

2.3. WIRELESS ACCESS TECHNOLOGIES
Table 2.2: Features of wireless network technologies proposed to deploy VANETs.
Name Coverage Transfer data rates Power consumptionWiFi 500 m 54 Mbps High
WiMax 50000 m 70 Mbps HighBluetooth 20 m 3 Mbps Medium
UWB 10 m 480 Mbps LowZigBee 75 m 250 Kbps Very lowWAVE 500 m 27 Mbps High
2.3.2 Cellular Technoligies
The main drawback of the wireless ad-hoc connection technologies is the link lossproblem when there is not any nearby node, this problem is aggravated when theyare used on nodes with high mobility as in VANETs. In order to avoid this problemthere are different lines of research that do not rule out using cellular connectiontechnologies such as GPRS, UMTS or HSDPA to deploy VANETs (see Figure 2.5).Following, we present these technologies:
Figure 2.5: Accident warning by using GPRS.
• GPRS (General Packet Radio Service): GPRS is an extension of GlobalSystem for Mobile Communications (GSM) that offers a packet oriented mobiledata service available to users of 2G cellular communication systems. GPRSprovides data rates between 56 and 114 Kbps. 2G cellular systems combinedwith GPRS are often described as 2.5G, that is, a technology between thesecond (2G) and third (3G) generations of cellular communication technolo-gies. It is being used to provide services such as Short Message Service (SMS),Multimedia Messaging Service (MMS), Wireless Application Protocol (WAP),Internet access, etc.
21

CHAPTER 2. VANET NETWORKS
• UMTS (Universal Mobile Telecommunications System): UMTS is oneof the third-generation (3G) cellular communication technologies, it emergesto offer the possibility of making video-calls to users of cellular phones. UMTSalso provides Internet access with high quality multimedia content since itsdata rate is up to 2 Mbps.
• HSDPA (High-Speed Downlink Packet Access): HSDPA is an optimiza-tion of UMTS, hence it is known as 3.5G. The improvements have increasedtransfer data rates to 14 Mbps. While real rates remain close to 3 Mbps, whichis enough for one of the most innovative services to emerging technology: ac-cess to television content via the mobile terminal by streaming.
Currently, it is being developing new cellular telecommunications technologies asforth (4G) and fifth (5G) generations [100]. However, these two technologies havenot yet been deployed.
2.4 Routing Protocols
Because of the fact that it may be necessary to send a packet through several vehi-cles to reach a determinate node a routing protocol is needed. Designing an efficientand reliable routing strategy is one of the most challenging problem in the field ofVANETs. As these are wireless ad-hoc networks, all nodes behave as routers andtake part in discovery and maintenance of routes to other nodes in the network. Anadaptable routing strategy is required since network conditions change continuouslysuch as: network topology, traffic density, and network partitioning. Additionally,the routing protocol may need to provide different levels of QoS to different typesof applications and services. The first solution has been the application of MANETrouting protocols directly or modifying them, however these protocols are unsuitabledue to VANETs and MANETs have critical differences (see Section 2.2). In parallelwith this, some VANET specific protocols are also proposed.
In this section we present different approaches trying to solve the routing problemin VANETs. But previously, we describe the different communication patterns, thatis, the problem of which nodes will be the receivers of the transmitted information.This is another problem related to routing strategy.
22

2.4. ROUTING PROTOCOLS
2.4.1 Communication Patterns
Communication pattern refers to which nodes will receive the packets sent by thedata source. Mainly, we can find two different communication patterns: unicast-ing and multicasting. The first one describes communications in which the sourcenode sends information just to one receiver node (see Figure 2.6.a) and multicastingis the communication pattern where one node transmits a packet to multiple nodes(see Figure 2.6.b).
The easiest multicasting strategy is to generate a separate copy for each destina-tion and transmit them separately. However, this is the most costly approach sinceit does not use information about the path the packets follow and the routes betweenthe source and destinations may follow the same path up to a certain node (whenmulti-hop communication is carried out). Although this is a challenging issue, thereare solutions in the literature [38]. There are different multicasting approaches, themost used ones are: broadcasting, anycasting, and geocasting.
Broadcasting strategies theoretically send information to all nodes in a network(see Figure 2.6.c), but in practice the information is only received by the nodes onthe broadcasting domain. The anycasting sends a packet to just one destinationof a number potential destination nodes, the node which receives the packet is notspecified (see Figure 2.6.d).
The last multicasting strategy, geocasting, is the most promising approach to beused over VANET and MANET networks. This strategy sends packets to a group ofreceiver nodes that are located within a certain geographic area (see Figure 2.6.e).In this case there is no definition of any group for a terminal as broadcasting. Thegeographical location defines whether a node will receive packets or not.
2.4.2 Routing Protocols Classification
Routing protocols can be classified in two major categories depending on when andhow the routes are discovered, these are: proactive (table-driven) and reactive(on-demand) protocols. In proactive routing protocols all nodes have consistentand up-to-date routing information to each node permanently whereas in reactiverouting the routes are created when is needed by the source node.
23

CHAPTER 2. VANET NETWORKS
a) Unicasting b) Multicasting
c) Broadcasting d) Anycasting
e) Geocasting
Figure 2.6: Communication pattern representations.
Each node maintains one or more tables containing routing information to ev-ery other node in the network when proactive routing protocols are used. Whenthe network topology changes nodes propagate messages throughout the network inorder to maintain a consistent and up-to-date routing information about the wholenetwork. These routing protocols differ in the method by which the topology changeinformation is distributed across the network and the number of necessary routing-related tables.
24

2.4. ROUTING PROTOCOLS
The strategy followed by on-demand routing protocols is different, since the routeis established just when is required for a network connection. When a source nodeS needs to connect to a destination node D, S invokes a routing discovery processto find a route between them. After route establishment, nodes S and D as well asintermediate nodes store the information regarding the route from S to D in theirrouting tables. The route is maintained until the destination is unreachable or theroute is no longer needed.
On the one hand, proactive routing protocols have the advantage of reduced end-to-end delay, since, upon generation of a network connection request, the route isalready established. However, their disadvantage is the fact that routing informationis disseminated to all network nodes increasing the traffic and power consumption.Thus, bandwidth for user traffic is reduced and the operating time of the battery-powered mobile nodes is limited. On the other hand, reactive routing protocols havea lower power consumption and demand less control signaling. However, end-to-endconnection delay is higher, since upon generation of a connection request betweentwo nodes, the connection needs to wait some time for the link between the nodesto be established [97].
Finally, some works have studied the possibility of applying the actual MobileIP protocol [109] over vehicular networks [81] and [30]; however this protocol cannotfulfill the requirements for routing in which not only the hosts but also the backboneis mobile and multi-hop wireless connections composed of many links with varyingQoS are allowed. Therefore, more adaptive network layer protocols are required.Proactive or reactive approaches can be followed when designing a routing algorithmfor ad-hoc networks [97].
2.4.3 Routing Protocols for VANETs
There are a high number of routing protocols that can be applied over vehicularad-hoc networks in the literature offering different QoS, mostly MANET routingprotocols; therefore this section will give a brief overview of a representation ofthem. Some of these protocols are shown in Table 2.3. Following, we present themain features of the most significant routing protocols.
25

CHAPTER 2. VANET NETWORKS
Table 2.3: Main features of routing protocols applied on VANETs.
Protocol Comm. pattern Scheme Use of geograph. info.Bliding-Flooding [91] Broadcasting - No
MPR [118] Broadcasting - NoNES [127] Broadcasting - NoCDS [127] Broadcasting - NoDSR [69] Unicasting Reactive No
AODV [111] Unicasting Reactive NoTORA [107] Unicasting Reactive NoDSDV [110] Unicasting Proactive NoLAR [75] Unicasting Proactive YesFSR [65] Unicasting Proactive NoOLSR [66] Unicasting Proactive NoZRP [55] Unicasting Hybrid No
MAODV [3] Multicasting Reactive NoGeoTORA [74] Geocasting Reactive YesGeoGRID [143] Geocasting Reactive Yes
LBM [76] Geocasting Proactive YesGAMER [19] Geocasting Proactive Yes
Blind-Flooding: Blind-Flooding protocol [91] is the simplest broadcasting pro-tocol. Each node receiving a packet repeats it by broadcasting (see Figure 2.7)unless a maximum number of hops for the packet is reached, the packet has beenalready sent or the destination of the packet is the node itself. It does not requirecostly topology maintenance or complex route discovery algorithms. However, itdoes not take into account the available resources at the nodes or links, i.e. resourceblindness, and the nodes receive duplicated packets (see Figure 2.7).
Figure 2.7: Blind-Flooding protocol representation.
Connected Dominating Sets (CDS): CDS [127] establishes a hierarchy withinthe network nodes classifying them as dominant or passive. The transmissions ofthe first ones should cover the whole network (see Figure 2.8). This algorithm
26

2.4. ROUTING PROTOCOLS
reduces the network traffic; however, the computation of the minimum connecteddominating set over a given graph is in general an NP-Complete problem [83],thus approximations must be employed in practice.
Figure 2.8: CDS protocol representation with dominant nodes in black and passivenodes in white.
Destination-Sequenced Distance Vector (DSDV): DSDV [110] is a proactiveunicast routing protocol based on the distance-vector. The routing tables are sentafter a significant change in the topology of the network. In DSDV routing tables,each route is tagged with a sequence number originated by the destination indicatinghow old the route is. Each node manages its own sequence number by assigning ittwo greater than the old one (call an even sequence number) every time. When aupdated route with a higher sequence number is received, the old route is replaced.In case of different routes with the same sequence number, the route with bettermetrics is used.
Dynamic Source Routing (DSR): DSR [69] is a reactive unicast routing pro-tocol. The main idea is discovering the best cost route for the destination node(discovery procedure). When a node has a packet to send and it does not knowthe route for the destination, it sends out a route request packet (see Figure 2.9.a).While this packet is being transferred through the network, all the nodes traversedare recorded in the packet header. A node that knows the route to the destinationdoes not forward the packet further, but appends the route to the route informationalready accumulated in the packet and returns a route reply packet to the sourcenode (see Figure 2.9.b). Using this information the source node updates its routingcache and delivers the packet to the destination node through the discovered route.If the discovered route fails, the source node receives a route error packet and thediscovery procedure is invoked again.
27

CHAPTER 2. VANET NETWORKS
a) Route request packet delivery.
b) Route reply packet reception.
Figure 2.9: Discovery procedure used by DSR routing protocol.
Ad hoc On-Demand Distance Vector (AODV): AODV [111] is a reactiveversion of DSDV protocol. As DSDV, in AODV every node maintains a routingtable where there can be at most one entry for a destination. Each entry has fieldslike the neighbor node to relay an incoming packet destined to a specific node andthe cost of the selected route. AODV differs from the distance vector algorithmby its routing table maintenance mechanism. If there is not an entry for the nexthop router destination in the packet; a new route is discovered by broadcastinga route request (RREQ) packet. An RREQ packet includes the following fields:source address, request id, destination address, source sequence number, destinationsequence number, and hop count. The source address is the address of the initiatorof the route requesting.
Zone Routing Protocol (ZRP): ZRP [55] was introduced in 1997 as the firsthybrid routing protocol with both a proactive and a reactive routing components.ZRP defines a zone around each node consisting of its k-neighbourhood called routing
28

2.4. ROUTING PROTOCOLS
zone of node. This protocol is formed by two sub-protocols, a proactive routingprotocol called Intra-zone Routing Protocol (IARP), which is used inside routingzones, and a reactive routing protocol known as Inter-zone Routing Protocol (IERP),which is used between routing zones. A route to a destination within the local zonecan be established from the proactively cached routing table of the source by IARP,therefore, if the source and destination is in the same zone, the packet can bedelivered immediately.
Optimized Link State Routing (OLSR): OLSR [66] is one of the most popularMANET proactive unicast protocols. It finds an alternative route when a link failuretakes place. Every node broadcasts periodically Hello-messages with informationto specific nodes in the network to exchange neighbourhood information. Sendingthese messages the size of the data to exchange to generate routes is lesser sinceit does not interchange the routing tables. After receiving this information a nodebuilds an individual routing table. After, the node is able to calculate with shortestpath algorithm the route to every destination node.
Multicast AODV (MAODV): As the name suggests, MAODV is a multicastextension of AODV. MAODV [3] allows the creation of bidirectional shared treesconnecting multiple source and destination nodes for each multicast group. Multi-cast routes are discovered on demand. Themulticast route request is broadcasted likethe unicast route request, and the route reply propagates back from the nodes thatare members of the multicast group. However, in MAODV, each multicast grouphas a leader responsible for the maintenance storing a sequence number for eachgroup. This number, as in AODV, indicates the relevance of the route information.
Geocast Adaptive Mesh Environment for Routing (GAMER): GAMER isa geocasting routing protocol used in several VANET designs. The route to a geocastarea is fragile and can break down at any time. The authors of GAMER [19] proposeit to solve this problem by identifying redundant paths from the source node to thegeocast area. First, the source node sends a JOIN-DEMAND packet using floodingthrough the forwarding zone to any node in the geocast area. Once received thepacket, the receiver node responds by sending JOIN-TABLE packet in reverse tothe source node. Once the source node receives this JOIN-TABLE packet is able tostart sending the geocast packets.
29

CHAPTER 2. VANET NETWORKS
2.5 Applications
Previously, we presented the technologies that have been taken into account to de-ploy VANETs by the research community and industry.In recent years, an extensivelist of potential applications and services addressed to be applied over such networkshave been proposed. The main factors that have led to this development are:
• the progress in the technologies that they need,
• the investment by the automotive industry, which sees in this technology away to increase both safety and comfort of its products,
• and the gamble of governments and institutions because they understand thatit can improve the daily lives of citizens.
This is reflected in the large number of projects and consortia that are currentlyworking on developing VANET networks. Nowadays, the main research foci are inEurope, USA, and Japan. The following is a non-exhaustive list of some of theprojects/consortia grouped by their geographical areas:
• Europe: Prometheus (1986-1994), CHAUFFEUR (1996-2003), FleeNet (2000-2003), C2C-CC (Car-to-Car Communication Consortium) (2001-currently),PReVENT (2004-2008), NoW (Network on Wheels) (2004-2008), CARLINKConsortium4 (2006-2008), and WiSafeCar 5 (2009-currently).
• USA: PATH (California Parthners for Advanced Transit and Highways) (1986),IVI (Intelligent Vehicle Initiative) (1998-2004), WAVE (Wireless Access in Ve-hicular Environments) (2004), VII (Vehicle Infrastructure Integration (2004-2006), and VSC (Vehicle Safety Communications Consortium) (2002-2009).
• Japan: JSK (Association of Electronic Technology for Automobile and Driv-ing) (1981), ASV (Advanced Safety Vehicle Program) (1991-2007), and VICS(Vehicle Information and Communication System Center) (1995-2008).
Additionally, there are some projects which are not specifically proposed to tackleproblems for vehicular ad-hoc networks as DIRICOM (Diseño Inteligente de RedesInalámbricas de Comunicación)6 at University of Málaga. However, they addressseveral design VANET problems offering different results.
4CARLINK Website - http://carlink.lcc.uma.es5WiSafeCar Website - http://wisafecar.gforge.uni.lu6DIRICOM Website - http://diricom.lcc.uma.es
30

2.5. APPLICATIONS
Typically, the literature categorize applications in three different groups: safety,transport efficiency, and information/entertainment applications. Nevertheless, thesegroups cannot be seen completely orthogonal. Thus, an application designed to pre-vent car crashes improves the efficiency because it avoids the traffic jams that theaccidents may cause. Following, we summarize some existing and potential appli-cations that have been proposed for VANETs and we present the most importantrequirements of these applications.
2.5.1 Safety-related Applications
The applications included in this group are designed to reduce the number of trafficaccidents making trips more safety. Different consortia have designed applications toachieve this purpose. VSC consortium identified eight potential applications [115]:traffic signal violation warning, curve speed warning, emergency electronic brakelight, pre-crash sensing, cooperative forward collision warning (see Figure 2.10), leftturn assistant, lane-change warning, and stop sign movement assistant.
Figure 2.10: VANET application: Cooperative forward collision warning.
C2C-CC consortium [133] proposed other safety-related applications that couldbe used jointly with the ones presented before: approaching motorcycle warning(see Figure 2.11) or road works warning (see Figure 2.3). Additionally, CARLINKpresented an application of real time weather information and forecast broadcast-ing. This application is useful in countries where the weather can change suddenlymaking dangerous the road trips, as in Scandinavian countries.
31

CHAPTER 2. VANET NETWORKS
Figure 2.11: VANET application: Approaching motorcycle warning.
Note that these applications require vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications. The derived technical requirements show theimportance of one-hop broadcast communication (i.e., a vehicle simply transmits apacket, and every vehicle that is able to receive it directly is considered a one-hopneighbor), which comes in two flavors: event-driven or periodic [58].
2.5.2 Transportation Efficiency Applications
For this second group, the transportation efficiency applications, CARLINK consor-tium presented an innovative user guidance approach able to offer optimal routeswhich may involve different transportation modes, this approach is called optimalmultimodal transport service [9]. Applying this concept the user is able to takethe optimal trip taken into account that he can walk, drive a car, take the publictransport, etc.
C2C-CC [133] analyzed efficient route guidance and navigation applications,green light optimal speed advisory, and lane merging assistants. But as we haveremarked before, the applications developed to increase safety on our roads alsoinfluence the efficiency.
The requirements of these applications are network technologies to communicateand the use of a global positioning system as the offered by the american GPS(Global Positioning System) or the european Galileo. We must emphasize that theaccess to low cost GPS receiving devices with Internet connection has also influencedthe growth of the this field.
32

2.6. SIMULATION OF VANETS
2.5.3 Information and Entertainment Applications
Finally, information and entertainment applications include a set of applications ofdifferent flavors. A representation of this set of applications are: automatic tollingpayment, point of interest notification, fuel consumption management, podcastingservices (see Figure 2.12), and multi-hop wireless Internet access [58]. CARLINKalso proposed applications such as automatic searching of free parking spaces ina given area, file sharing service, and multiplayer games for the car passengers ofdifferent vehicles via ad-hoc wireless connections.
Figure 2.12: VANET application: Publicity board podcasting of a cinema.
These applications have different communication requirements to those presentedpreviously, since they have less necessity of fault tolerance and response time. Mainlybecause the information transmitted is not as critical as in traffic safety and effi-ciency applications. Thus, an important consideration for all information/entertain-ment applications is whether the application is ideally implemented using the samecommunication platform for all application groups or whether they could be betterimplemented using competing/separate network technologies.
2.6 Simulation of VANETs
The emergence of vehicular networks has encouraged the design of a set of newapplications and protocols specifically for these kind of networks. The evaluationof those in outdoor experiments, by using large-scale networks to obtain significantresults, is extremely difficult due to several issues concerning available resources, ac-curate performance analysis, and reproducible results. Indeed, it is neither easy norcheap to have a high number of real vehicles and a real scenario for only practicalpurposes. It is also difficult to analyze applications and protocols performance in ainherently distributed and complex environment like VANETs.
33

CHAPTER 2. VANET NETWORKS
Simulation has become an indispensable tool because it makes possible to builda dedicated VANET for its evaluation. Simulators also gather statistical data aboutthe network usage during the simulation that allows to measure the protocols per-formance. Moreover, it is possible to visualize the VANET in order to easily specifythe scenarios for the protocol evaluation.
However, due to the complexity of the real world, a lot of the events relatedto the signal propagation that plays an important role in the performance of theoutdoor experiments are missed in the simulations: passing by obstacles, reflectionproblems, signal interferences, etc. Thus, simulation also presents an importantdrawback: the fidelity of the generated results.
2.6.1 VANET Simulation Alternatives
Nowadays, we identify different approaches trying to solve the complex problem ofVANET simulation. First, the most widely used, the desingner could use a traf-fic simulator for generating realistic vehicular mobility traces that will be used asthe input for a mobile ad-hoc network simulator. Second, the designer could use aspecially-designed VANET simulator tool. Finally, some MANET application pro-gramming frameworks allows the developer to test the applications via simulations.
The first approach used for simulating VANETs lies in using road traffic simula-tors capable of generating mobility traces, which are later evaluated by an existingspecific MANET simulator. The public availability of many of these MANET sim-ulators is the main motivation for the success of this approach. However, it has amajor drawback: the majority of VANET applications implies that vehicles reactto the network events and this behavior is difficult to be modeled with this scheme.The most research community adopt Ns-2 (network simulator) [98] for MANETsimulating, even there are more network simulators as OMNet [103], Ns-3 [99] orOPNET [105].
The number of road traffic simulators which generate Ns-2 format traces is large:the most comprehensive ones are VanetMobiSim and SUMO, however we can alsofind Videlio, RoadSim, CARISMA, VISSIM, and MMTS. There are also traffic sim-ulators that generate traces for other MANET simulators as CORSIM/TSIS, SJ04,SSM/TSM, and STRAW. Finally, TraNS and MOVE are simulators which combinethe SUMO mobility model generator and Ns-2 simulator in a unique tool [8].
34

2.6. SIMULATION OF VANETS
The specially-designed VANET simulators join scalable vehicular mobility de-scriptions and network stack modelling in a single tool. These combined approacheshave the big advantage of allowing a direct interaction between the communicationnetwork system and the vehicular traffic dynamics, thus, the first can influence thesecond. However, they also have a major drawback: the level of detail of both mod-ules is necessarily lower than that provided by ad-hoc simulation tools. GGCDCI06,MoVES, and the GrooveNet are specific VANET simulators [8].
Finally, there are some frameworks as JANE [54], a Java-based middleware plat-form for MANET applications programming. It allows the developer to test theapplications in a simulation environment and, also, over real mobile devices.
2.6.2 VanetMobiSim/Ns-2 Simulator
In [8], the authors present a simulator tool based on the combination of the roadtraffic simulator VanetMobiSim and the network (MANET) simulator Ns-2 [98],VanetMobiSim/Ns-2 (see Figure 2.13). This simulator tool is used in differentprojects as CARLINK and DIRICOM.
VanetMobiSim is an extension to CanuMobiSim [21], a generic user mobilitysimulator. CanuMobiSim provides an efficient and easily extensible mobility archi-tecture, but due to its general purpose, it suffers from a reduced level of detail inspecific scenarios. VanetMobiSim is therefore aimed at extending the vehicular mo-bility support of CanuMobiSim to a higher degree of realism. The main features ofthis simulator are that it is specific for VANETs and an open source platform; itsupports both macro-mobility and micro-mobility specification; and it uses intuitiveXML code to specify the different scenarios. However the most important feature ofVanetMobiSim is that it has been validated in actual communication scenarios [57].Its main drawback is that it offers a poor documentation.
Ns-2 is an open source network simulator, so it is freely available and the useris able to modify the source code (C++ and OTcl) [131]. It provides a packet levelsimulation over a lot of protocols, supporting several transport protocols, severalforms of multicast, wired networking, several ad-hoc routing protocols and propa-gation models, data broadcasting, satellite, etc. It incorporates different networkflow generators as web, telnet, CBR (constant bit rate generator), etc. for using
35

CHAPTER 2. VANET NETWORKS
them in the simulations. In addition, Ns-2 has the possibility of using mobile nodes.The mobility of these nodes may be specified either directly in the simulation fileor by using a mobility trace file. In this case, the trace file is generated by Vanet-MobiSim. Finally, other important feature is that it incorporates several add-ons asthe visualization tools NAM [96] (Network Animator) and TraceGraph [67].
Figure 2.13: VanetMobiSim/Ns-2 basic architecture.
2.7 Research Challenges in VANETs
Advances in wireless ad-hoc communication technologies have made possible theemergence of VANETs, however the involved research community and industry stillhave to address several problems to offer a complete VANET development readyto be deployed. This section covers current research challenges grouping them indifferent topics.
• Wireless access technology: Nowadays there are several wireless accesstechnologies that could be used to deploy VANETs (see Section 2.3). In gen-eral, the research community is working on the specification of a set of airinterface protocols and the parameters for high-speed nodes (vehicles) com-munication using available media. Most efforts are focusing on two differenttechnologies: IEEE 802.11 based (see Section 2.3.1) and cellular (see Sec-tion 2.3.2) technologies.
36

2.7. RESEARCH CHALLENGES IN VANETS
• Spectrum issues: The use of IEEE 802.11 based technologies for VANETcommunications needs to allocate these communications at the free spectrum.In the US the FCC has already allocated 75 MHz of spectrum at 5.9 GHz (from5.850 to 5.950 GHz) for V2V and V2I communications [141]. However, in Eu-rope there are not a continuos free spectrum band of 75 MHz in DSRC. HenceCar-2-Car consortium has proposed a derivative of the US approach, allocating2× 10 MHz for primary use of safety critical applications at 5.9 GHz [108].
• Routing strategies: The performance of MANET routing protocols haveimproved quite a lot during the last years appearing several specialized ap-proaches (see Section 2.4.3). Unfortunately, in case of vehicular networks cer-tain characteristics make most of these protocols unsuitable (see Section 2.2).The research community is currently working on three different approaches:
– Opportunistic forwarding [80]: The data is stored until there is an oppor-tunity to forward it.
– Trajectory forwarding [68]: The road side infrastructure serve as an over-lay directed graph.
– Geographical forwarding [136]: The packets are forwarding towards thedestination based on node geographical location.
These three approaches may be used mixing them developing hybrid solutions.
• Message dissemination: VANET applications require broadcast informa-tion continuously (see Section 2.5), thus finding an optimal broadcasting tech-nique is critical in this kind of networks. Nowadays, several broadcasting ap-proaches are taken into account,e.g., location-aware broadcasting [88], whichlimits the broadcast range only to the area of interest reducing overhead (avoid-ing the broadcast storm problem), or clustering [44] where neighbor nodes formclusters limiting the broadcasting range.
• Security and privacy: The potential of the proposed applications for suchnetworks and the information they may manage could cause some maliciousentity make use of them. Different kind of threats could exist, like fake mes-sages broadcasting which could cause disruption of traffic or even danger.Thus, security is an issue that needs to be carefully addressed in the designof VANETs. Privacy and anonymity must be preserved avoiding identificationor vehicle tracking for non-trusted parties.
37

CHAPTER 2. VANET NETWORKS
• VANET simulation: Testing the impact of VANET applications before theirdeployment is an important issue. Nowadays, simulation seems to be the mostfeasible solution for this purpose, however it requires the modeling of driverbehavior in different context, such as an accident [58], apart from wireless ad-hoc communication as close as possible to the real world. This is not trivialand is still an open problem.
Additionally, we have to take into account some socio-economic challenges [58]since the market introduction of VANET technologies suffers the network effect.That is, the added value for one customer depends on the number of customers intotal who have equipped their vehicle with VANET technology. Therefore the mainquestion is how to convince early-adopters to buy VANET equipment. There areseveral options that are being discussed like the enforcement by law or the attractivedeployment applications. Also this problem is still open.
As it can be seen from the presented list of challenges, the study of vehicu-lar ad-hoc networks is an open problem that involves different areas of knowledge.It involves communication technologies, metaheuristics for optimization problems,cryptography and intrusion detection for security [18], sociological studies and math-ematical modeling of driver behavior [87], and so on.
38

Chapter 3
Metaheuristics
Nowadays, researchers employ three different approaches to solve optimization prob-lems: exact algorithms, heuristics, and metaheuristics. The main advantage of usingexact algorithms is that they offer the guarantee of finding global optimum for agiven problem. However, they are not directly applicable to the most of real prob-lems (NP-hard) because the required execution time grows exponentially with thesize of the problem. In contrast, the non structured heuristics are usually prettyfast, but generally they offer non optimal solutions. Furthermore, the adaptation ofthis approach to the most of problems is complex. Finally, the metaheuristics aregeneric methods which offer good solutions, even global optimum, within a reason-able computing time.
This chapter is aimed at establishing the foundations needed to understand themetaheuristics algorithms used to address optimization problems. First, in Sec-tion 3.1, we offer some important definitions to understand the topic of optimizationproblems. Then, Section 3.2 briefly introduces a representative set of optimizationtechniques. Finally, Section 3.3 presents in more detail the used algorithms to solvethe problem addressed in this project.
3.1 Definition of Metaheuristic
Optimization problems consist of the search for a best configuration of a set of vari-ables to achieve some goals [35]. Generally, optimization problems can be seen as thesearch for the best solution, or at least good enough, to a given problem. Currentlythey are using optimization techniques in fields as diverse as networking, economicsor logistics. Humans are constantly solving optimization problems, such as what
39

CHAPTER 3. METAHEURISTICS
route to take to get from one place to another, how to organize our schedule, etc.As these problems have small dimension, we can process them easily by using ourbrain. However, when the optimization problems become larger and more complexit appears the necessity of using specialized tools and the computational power ofcomputers
This section is intended to define different concepts that will be used throughoutthe chapter and whole memory. Begining with the formal definition of optimization.Assuming, without loss of generality, in the case of minimization, we can define anoptimization problem as:
Definition 1 (Optimization Problem): The pair P = (S, f) is an optimizationproblem where S 6= ∅ represents the search space (or solution space), and f is anobjective function (or fitness), defined as:
f : S −→ R (3.1)
The search space S is given by a set of variables X = {x1, x2, ..., xn} and theirdomains that are respectively D1, D2, ..., Dn. Thus, solving an optimization problemconsist in finding a solution x∗i ∈ S such that
f(x∗i ) ≤ f(xi),∀xi ∈ S (3.2)
Above, the optimization problem is presented as a minimization problem, sinceaccording to the next equation [52] there exist a direct relation between maximiza-tion and minimization problems:
max{f(xi) | xi ∈ S} ≡ min{−f(xi) | xi ∈ S} (3.3)
Optimization problems can be classified depending on the domain where S be-longs. According to this classification, we can define binary (S ⊆ B∗), integer(S ⊆ N∗), real (S ⊆ R∗), and mixed or heterogeneous (S ⊆ (B ∪N ∪R)∗) optimiza-tion problems.
The importance of the existing optimization problems has prompted the develop-ment of multiple methods to solve them along the history of Information Technology.A brief classification of these techniques is shown in Figure 3.1. The more generalclassification which divides these techniques into exact and approximate. The exact
40

3.1. DEFINITION OF METAHEURISTIC
methods, which are based on the mathematical extraction of the optimal solution,or an exhaustive search until the optimum is found, guarantee the optimality of thesolution obtained. These techniques present some drawbacks, however. The timethey require, though bounded, is generally very large, especially for NP-complexproblems. Furthermore, it is not always possible to find such an exact techniquefor every problem. This makes exact techniques not to be the right choice in manyoccasions, since both their time and memory requirements can become unreasonablyhigh for large problems. Therefore, approximate methods have been often usedby the research community in the last few decades. These methods sacrifice theguarantee of finding the optimum in favor of providing some satisfactory solutionwithin reasonable time.
Figure 3.1: Optimization techniques classification.
Among approximate algorithms, one can find two types: ad hoc heuristics andmetaheuristics. We focus this chapter on the latter. Ad hoc heuristics can in turnbe divided between constructive heuristics and local search methods.
Constructive heuristics are usually the swiftest methods. They construct a solu-tion from scratch by iteratively incorporating components until a complete solutionis obtained, which is returned as the algorithm output. Finding some constructiveheuristic can be easy in many cases, but the obtained solutions are of low quality.In fact, designing one such method that actually produces high quality solutions isa nontrivial task, since it mainly depends on the problem, and requires thoroughunderstanding of it. For example, in problems with many constraints it could hap-pen that many partial solutions do not lead to any feasible solution.
41

CHAPTER 3. METAHEURISTICS
The neighborhood of a given solution xi, denoted as N(xi), is the set of solutions(neighbors) that can be reached from xi through the use of a specific modificationoperator, generally referred to as movement, (see Definition 2). A local optimumis a solution equal or better than any other solution in its own neighborhood (seeDefinition 3). The process of exploring the neighborhood, finding and keeping thebest neighbor, is repeated in a process until the local optimum is found. Completeexploration of a neighborhood is often unapproachable, therefore some modifcationof the generic scheme has to be adopted. Depending on the movement operator, theneighborhood varies and so does the manner of exploring the search space, simpli-fying or complicating the search process as a result [86].
Definition 2 (Neighborhood): Let (S, f) an optimization problem. A neigh-borhood structure is a function :
N : S −→ S (3.4)
that assigns to every xi ∈ S a set of neighbors N(xi) ∈ S. N(xi) is called theneighborhood of xi [15].
The introduction of a neighborhood structure enables us to define the conceptof locally optimal solutions.
Definition 3 (Local optimum): Let (S, f) an optimization problem, and Si′ ∈ Sthe neighborhood of xi′ ∈ S (N(xi′) = Si′), xi′ is a local optimum (minimum) if itsatisfies the following inequality:
f(xi′) ≤ f(xi), ∀xi ∈ Si (3.5)
Finally, three decades ago came a new stream research within the approximatealgorithms. It basically tries to combine basic heuristic methods in higher levelframeworks aimed at efficiently and effectively exploring a search space. Thesemethods are called metaheuristics, but they were often called modern heuristics.To this type of algorithms belong the tabu search (TS), genetic algorithms (GA),differential evolution (DE), and simulated annealing (SA), among others. Since itsemergence the term metaheuristic has been defined in different ways. Osman andLaporte proposed a widely used definition in 1996 [106], which is presented following:
42

3.2. METAHEURISTICS CLASSIFICATION
A metaheuristic is formally defined as an iterative generation processwhich guides a subordinate heuristic by combining intelligently differentconcepts for exploring and exploiting the search space, learning strategiesare used to structure information in order to find efficiently near-optimalsolutions.
The fundamental properties which characterize the set of metaheuristic algo-rithms are the following ones [47]:
• Metaheuristics are higher level strategies that gide the search process.
• The goal is to efficiently explore the search space in order to find (quasi -)optimal solutions.
• Metaheuristic algorithms are approximate and generally non-deterministic.
• The basic concepts of metaheuristics permit an abstract level of description.
• Metaheuristics are not problem-specific.
• Metaheuristics may make use of domain-specific knowledge in the form ofheuristics that are controlled by the upper level strategy.
• Todays more advanced metaheuristics use search experience (embodied insome form of memory) to guide the search.
3.2 Metaheuristics Classification
There are different ways to define a metaheuristics taxonomy. Depending on thecharacteristics selected to differentiate among them, several classifications are pos-sible, each of them being the result of a specific point of view. Next, we brieflysummarize the most important ways of classifying metaheuristics [15]:
• Nature inspired (bio-inspired) vs. non-nature inspired : Generally, it is themost natural way to classify metaheuristics, since it is based on the origins ofthe algorithm. It takes into account whether their models have been inspiredby Nature or not. There are bio-inspired algorithms, like Genetic Algorithms(GA) and Ant Colony Algorithms (ACO), and non nature-inspired ones suchas Tabu Search (TS) and Iterated Local Search (ILS). This classification is notvery meaningful since the emergence of hybrid algorithms.
43

CHAPTER 3. METAHEURISTICS
• Population-based vs. single point search (trajectory): In this case, the charac-teristic used for the classification is the number of solutions used at the sametime. On the one hand, single point search algorithms work on a single solutiondescribing a trajectory in the search space during the search process. They en-compass local search-based metaheuristics, like Variable Neighborhood Search(VNS), Tabu Search (TS), and Iterated Local Search (ILS). On the other hand,population-based methods work on a set of solutions (points) called popula-tion. Figure 3.1 shows graphically some examples of this taxonomy.
• Static vs. dynamic objective function: The algorithms which keep the objectivefunction given in the problem during the whole process are called metaheuris-tics with static objective function. However, there are other algorithms withdynamic objective function, like Guided Local Search (GLS), which modify thefitness function during the search, incorporating information collected duringthe search process to escape from local optimum.
Other characteristics can be used for classification of different metaheursitics, likethe number of neighborhood structures and the use or not of memory. In the follow-ing subsections, we present briefly some of the most representative metaheuristicsgrouping them into trajectory or population based algorithms.
3.2.1 Trajectory-based Metaheurístics
The main characteristic of trajectory-based metaheuristics is that they start froman initial solution (point) which is updated exploring the neighborhood, describing atrajectory. These metaheuristics emerge to improve local search methods extendingthem adding mechanisms to escape from local minimum. Such methods need newstop conditions different from finding local minimum, they use more complex andelaborated ones. The most commonly used are that the algorithm stop when acertain number of iterations is reached, when the found solution has an acceptablequality, or when it is detect a deadlock in the search process. Next, we describebriefly some metaheuristics based on trajectory.
• The Simulated Annealing (SA) is probably the first algorithm that applies anexplicit strategy to escape from local minimum. It was described in 1983 [73],its origins lie in a statistical mechanism called metropolis [89]. The name andinspiration come from annealing in metallurgy, a technique involving heatingand controlled cooling of a material to increase the size of its crystals andreduce their defects. The heat causes the atoms to become unstuck from their
44

3.2. METAHEURISTICS CLASSIFICATION
initial positions (a local minimum of the internal energy) and wander randomlythrough states of higher energy; the slow cooling gives them more chances offinding configurations with lower internal energy than the initial one. To avoidlocal minimum, the algorithm allows to choose a solution with worse fitnessthan the current solution. Over successive iterations of the algorithm is chosen,from the current solution s, a solution s′ in the neighborhood N(s). If s′ hasbetter quality than s, then s is replaced by s′ as the current solution. However,if s′ is worse, then it is accepted with a certain probability that depends onthe current temperature T and the difference between the two fitness solutions(f(s)− f(s′)), in the case of minimization.
• Tabu Search (TS) is known as one of metaheuristics that have been appliedwith greater success in solving classical and real optimization problems. Thefundamentals of this method were introduced in [49], and both, technique andcomponents, were specified in [50]. It uses flexible structures of memory, whichpermit exploit the search information more thoroughly than by rigid memoryor memory-less systems, conditions for strategically constraining and freeingthe search process (emboided in tabu restrictions and aspiration criteria), andmemory functions of varying time spans for intensifying and diversifying thesearch (reinforcing attributes historically found good and driving the searchinto new regions).
• Variable Neighborhood Search (VNS) [92] is a relatively recent metaheuristicwhich relies on iteratively exploring neighbourhoods of growing size to identifybetter local optima. VNS has been applied to a wide variety of problems bothfrom combinatorial and continuous optimization. VNS method escapes fromthe current local minimum s′ by by initiating other local searches from startingpoints sampled from a neighbourhood of s′ (s′′ ← N(s′)) which increases itssize iteratively until a local minimum better than the current one is found.These steps are repeated until a given termination condition is met.
More precisely, the first step of this method is to define a set of neighborhoodsfor which we can use different methods. Then, successive iterations consistof three phases: the choice of candidate, a phase of improvement, and finally,movement. In the first step, it randomly chooses a neighbor s′ of s using thek − th neighborhood. This solution (s′) is used as the starting point for localsearch of the second phase, obtaining s′′. When the process of improvementis finished, the new solution s′′ is compared with the original s. If it is better,s′′ becomes the current solution and the neighborhoods counter is initialized
45

CHAPTER 3. METAHEURISTICS
(k ← 1), Otherwise, the process is repeated by using following neighborhood(k ← k + 1). Local search is intensifying over the method and changingneighborhood it can be seen as the way of diversification.
• Greedy Randomized Adaptive Search Procedure (GRASP) [121] is a simplemetaheuristic that combines constructive heuristics with local search. GRASPis an iterative procedure with two phases: first, a solution is constructed, sec-ond, the solution undergoes an improvement process. The improved solutionis the final result of the search process. A randomized heuristic is used for theconstruction of the solution in the first phase. Step by step, different com-ponents c are added to the partial solution sp, initially empty. Each addedcomponent is randomly selected from a restricted list of candidates (RCL).This list is a subset of N(sp), the set of permitted components for the partialsolution sp. The components of the solution in N(sp) are sorted according tosome problem dependent function η in order to generate the list. The RCLlist consists of the α best components in the set. In the extreme case of α = 1,only the best component found is added to the list, thus resulting in a greedyconstruction method. In the other extreme, α = ‖N(sp)‖, the component ischosen in a totally random way among all available components. Hence, α isa key parameter that determines how the search space is going to be sampled.The second phase of the algorithm consists in a local search method to im-prove the previously generated solutions. A simple local search method canbe employed, or some more complex technique like SA or TS.
• Iterated Local Search (ILS) [130] is a metaheuristic which involves the repeatedapplication of a local search algorithm applied to the candidate solutions foundby a broader search process that involves a biased random walk through thesearch space. ILS is based on a simple but effective idea. The algorithmworks by first selecting a starting point for the search either randomly orvia a domain specific construction heuristic. Then, the starting position isoptimized using a local search strategy. The algorithm loop involves threesteps: a perturbation of the current solution, the application of the local searchto the perturbation, and an acceptance decision of whether or not the locallyoptimizing candidate solution should replace the current working solution forthe search. The acceptance of new solutions depending on the search historyand characteristics of the new local minimum.
46

3.2. METAHEURISTICS CLASSIFICATION
3.2.2 Population-based Metaheurístics
In contrast with the previous methods, population-based algorithms are character-ized by working with a set of solutions (called population) in each iteration. Herewe introduce some representative population-based metaheuristics:
• Evolutionary Algorithms (EA) are based on the postulates of the evolutionarytheory, that is, they are inspired by biological evolution processes: selection,recombination, mutation, and reproduction [11]. This family of techniquespresents an iterative and stochastic process that operates on a population ofindividuals (solutions).EAs start by generating the population randomly or by means of some heuristicseeding procedure. The gloabal structure of the process consists of three mainphases (emulating the biological evolution): selection, production, and replace-ment, that are repeated until meeting certain stop criteria. In the first phaseindividuals of the population are chosen to be recombined during the produc-tion phase. Usually, the individuals are chosen according to their fitness. Toincrease the diversity, a mutation operator is applied to the individuals gener-ated previously . Finally, a new population is created by using the current oneand/or the best individuals generated, giving way to the next generation ofthe algorithm. Different algorithms have been proposed based on this generalscheme. These proposals can be classified into three main categories that weredeveloped independently, they are: the Evolutionary Programming (EP) pro-posed by Fogel [43], the Genetic Algorithms (GA) introduced by Holland [59],and the Evolution Strategies (ES) submitted by Rechenberg [120].
• Estimation of Distribution Algorithms (EDAs) [94] have similar behaviors tothe previously presented EAs, and many authors even consider EDAs as aspecial kind of EA. Like EAs, EDAs operate on a population of candidatesolutions, but, unlike them, do not use recombination and mutation to generatethe new solutions, but a probability distribution mechanism instead.
Graphic probabilistic models are commonly used tools to represent in an ef-ficient manner the probability distributions when working with EDAs. Someauthors [95, 20, 126] propose using bayesian networks to represent the proba-bility distributions in discrete domains, while gaussian networks are most oftenemployed for continuous domains [139].
47

CHAPTER 3. METAHEURISTICS
• Scatter Search (SS) [51] is a metaheuristic whose principles were presentedin [48]. The main contribution of this algorithm is the idea of maintaining arelatively small set of tentative solutions (called the reference set or RefSet).This set of solutions is characterized by its quality and variety (distant in thesearch space). This set is divided into subsets of solutions to which we applyan operation of recombination and other improvements.
Scatter Search consists of five main component processes:
1. A Diversification Generation Method to generate a collection of diversetrial solutions.
2. An Improvement Method to transform a trial solution into one or moreenhanced trial solutions.
3. A Reference Set Update Method to build and maintain a reference setconsisting of the b best solutions found organized to provide efficient ac-cessing by other parts of the solution procedure.
4. A Subset Generation Method to operate on the reference set, to producea subset of its solutions as a basis for creating combined solutions.
5. A Solution Combination Method to transform a given subset of solutionsproduced by the Subset Generation Method into one or more combinedsolutions.
Finally, note that it is currently receiving much attention from the researchcommunity [79].
• Ant Colony Optimization (ACO) [39] algorithm is a probabilistic technique forsolving computational problems which can be reduced to finding good pathsthrough graphs. It is based on the behavior of ants seeking a path betweentheir colony and a source of food. The original idea has since diversified to solvea wider class of numerical problems, and as a result, several problems haveemerged, drawing on various aspects of the behavior of ants. The behaviorof the ants is as follows: Initially, ants explore randomly the area near to thenest. As soon as an ant finds food, it comes back to the nest. In turn, this antdeposits a chemical called pheromone, creating pheronome trails. If other antsfind such a path, they are likely not to keep travelling at random, but to insteadfollow the trail, returning and reinforcing it if they eventually find food. Theindirect communication between ants using pheromone trails enables them tofind the shortest path between the nest and the food. ACO tries to solve
48

3.3. ALGORITHMS USED IN THIS WORK
optimization problems by simulating this behavior. The technique is based ontwo main steps: Construct Ant Solutions and Update Pheromones (pheromonematrix ).
• Particle Swarm Optimization (PSO) [70] is a population based metaheuristicinspired in the social behavior of organisms such as bird flocking and fishschooling. It is based on the factors that influence the decisions of an agentthat is part of a set of similar agents. In PSO, each candidate solution tothe problem is called particle and the population of particles is called swarm.During the iterative process, each particle adjusts its position (state) accordingto its own experience, and according to the experience of a neighboring particle,making use of the best position encountered by itself and its neighbor.
• Diffenrential Evolution (DE) [129] is a non-deterministic method based on apopulation of individuals who are real vectors that represent the solutions inthe search space. It was developed to optimize real (float) parameters of a realvalued function. The generation of new individuals is carried out by applyingdifferential operators of mutation and crossover to the individuals that areselected randomly. By differential mutation the proportional difference of therandomly chosen parents is added to a third individual, also chosen randomly.After the mutation, a recombination operator is applied over each individual(target) to generate an intermediate individual (trial). Finally, taken intoaccount the fitness values, a selection operator decides the acceptance (or not)of trial individuals for the new generation.
3.3 Algorithms used in this Work
In this section, we describe the five metaheuristic algorithms used in this study.Specifically, they are Simulated Annealing (SA), Genetic Algorithm (GA), Evolu-tionary Strategy (ES), Particle Swarm Optimization (PSO), and Differential Evolu-tion (DE).
We select these five algorithms because they are able to work on continuos (realvalued) search spaces. Also, these techniques were selected with the aim of ex-perimenting with different population structures, as well as different reproductionmechanisms.
49

CHAPTER 3. METAHEURISTICS
3.3.1 Simulated Annealing (SA)
Simulated Annealing was one of the first metaheuristic algorithms with an explicitstrategy to escape from local minimum. The basic idea is to allow movements toselect solutions worse than the current solution. The probability of performing sucha movement decrease during the search process (see Algorithm 1). The operation ofa typical SA is summarized in Figure 3.2.
Figure 3.2: Operation of a typical SA.
The whole process starts by generating an initial solution s (randomly or usingsome heuristic) and starting the temperature parameter (T ). The algorithm worksiteratively keeping a single tentative solution s at any time. In every iteration,a new solution s′ ∈ N(s) is generated from the previous one (Line 5), and eitherreplaces it or not depending on an acceptance criterion (Lines 6-10). The acceptancecriterion works depending on the fitness values (f(s) and f(s′)) and temperature T .s′ replaces s as current solution if f(s) < f(s′) (s′ has better quality). However, inthe case of f(s) ≥ f(s′), s′ replaces it with probability prob (Equation 3.6). Thisprobability depends on the difference between their quality (f(s′) − f(s)) valuesand T (Line 9). This acceptance criterion provides the way of escaping from localoptima.
prob(T, s, s′) =2
1 + ef(s′)−f(s)
T
(3.6)
50

3.3. ALGORITHMS USED IN THIS WORK
Algorithm 1 Simulated Annealing (SA)1: s ← generateSolution()2: initialize(T )3: evaluate(s)4: while g < maxGenerations or stopCondition() do5: s′ ← neighborSolution(N(s))6: if (f(s′) < f(s)) then7: s ← s’ // s’ replaces s as current solution8: else9: accept s′ as current solution with a probability prob(T, s, s′)10: end if11: update(T )12: end while
The temperature value (T ) is updated (generally decreasing) during the search.Thus, at the beginning the probability of accepting new solutions are high and itgradually decreases along the iterations, following a cooling schedule (Line 11). Thealgorithm ends by selecting only those solutions that improve the current one (s).This process is based on annealing in metallurgy, a technique involving heating andcontrolled cooling of a material to increase the size of its crystals and reduce theirdefects. The heat causes the atoms to become unstuck from their initial positions(a local optimum of the internal energy) and wander randomly through states ofhigher energy; the slow cooling gives them more chances of finding configurationswith lower internal energy than the initial one.
The algorithm is a result of the combination of two different processes: randomstep and iterative improvement. In the first phase, exploration of the search spacebecomes more random and erratic, producing movements to worst solutions. How-ever, as it iterates, the erratic component gradually decreases the search convergingto a optimum (local). The selection of solutions that do not improve the currentone is controlled by two factors: the difference between the fitness functions andtemperature (see Equation 3.6). First, if we fix the temperature, the higher thedifference f(s′) − f(s), less probability to move from s to s′. Moreover, the higherthe temperature T , the more probability to accept s′ as a new solution.
The selection of a suitable cooling strategy is crucial for the behavior of thealgorithm. The cooling strategy Q defines the temperature T for each moment k,Tk+1 = Q(Tk, k). The most used one is Tk+1 = α×Tk, where α ∈ (0, 1). The coolingstrategy and the initial temperature must be adapted to problems because the cost
51

CHAPTER 3. METAHEURISTICS
of escaping a local optimum depends on the structure of the search space. Thereare many ways leading to different variants of SA as: Fast SA (FSA), Very Fast SA(VFSA) or Adaptative SA (ASA) [17]. Ingber [64] proposed an empircal solutionwhich starts with an initial random sampling of search space and T0 is calculatedfrom the average and the standard deviation of the values of the objective function.
SA has been successfully applied to many optimization problems: the QuadraticAssignment Problem (QAP) [36] and the textitJob Shop Scheduling (JSS) [134].In the field of wireless mobile networks has been used in problems of optimizingMANET routing protocols [84] or the clustering of the nodes [82].
3.3.2 Genetic Algorithm (GA)
Genetic Algorithms are possibly the most widespread subclass of EAs. They wereconceived by John Holland [60]. As EA, it applies the natural selection principles tosolve optimization problems. During successives generations, the solutions evolve tothe optimum according to these principles. The evolution of these solutions dependslargely on an adequate codification of them.
GAs work with a population of individuals, each of which represents a feasiblesolution to a given problem. Each individual is assigned a value associated with thegoodness of this solution (fitness). Similarly, in Nature, the fitness could be seen asa value of of the adaptation and the effectiveness to compete for certain resources forbiological organisms. The higher individual adaptation to the problem, the graterthe probability to be selected to breed, i.e., crossing its genetic material with anotherindividual. This crossing produces new individuals descendants of the above ones,which share some characteristics of their parents. So, spread the genetic material ofthe best individuals in successive generations (see Figure 3.4). If the algorithm is de-signed properly, the population will converge to an optimum solution to the problem.
The algorithm manipulates a collection p of individuals (the population), eachof which comprises one or more chromosomes. These chromosomes allow each in-dividual represent a potential solution for the problem under consideration. Anencoding/decoding process is responsible for performing this mapping between chro-mosomes and solutions. Chromosomes are divided into smaller units termed genes.The different values a certain gene can take are called the alleles for that gene.
52

3.3. ALGORITHMS USED IN THIS WORK
The genes are encoded in a string of symbols (numbers or letters). There arevarious representations (see Figure 3.3) such as the use of binary numbers in BCDor Gray codes, the use of real or integer, etc. Most of the time, a correct coding isthe key to a good resolution of the problem. Typically, codification is static, but incases of numerical optimization, the number of bits dedicated to encode a parametercan vary.
Figure 3.3: Examples of gens encoding.
The algorithm (see Algorithm 2) is an iterative process which starts by gener-ating an initial population of solutions. This is typically addressed by randomlygenerating the desired number of solutions. When the alphabet used for represent-ing solutions has low cardinality, this random initialization provides a more or lessuniform sample of the solution space. Then, applying the genetic operators (selec-tion (Line 4), recombination (Line 5), mutation (Line 6), and replacement (Line 8))on this population.
Algorithm 2 Genetic Algorithms (GA)1: p0 ← initializePopulation()2: evaluation(p0)3: while g < maxGenerations or stopCondition() do4: pg
s ← selection(pg)5: pg
r ← recombination(pgs)
6: pgm ← mutation(pg
r)7: evaluation(pm
g )8: pg+1 ← replacement(pg
m)9: end while
53

CHAPTER 3. METAHEURISTICS
Figure 3.4: Operation of a typical GA.
Selection is responsible for the competition aspects of individuals in the pop-ulation. In fact, replacement can be intuitively regarded as the complementaryapplication of the selection operation. There exist different techniques to performthe selection, the most popular ones are:
• Roulette-wheel Selection: In these methods, the probability of selecting anindividual for breeding (pi) is proportional to its fitness (fi) as Equation 3.7shows. This selection technique allows the selection of the best individualswith greater probability, but at the same time the worst ones could be selected,maintaining the diversity of the population.
pi =fi∑N
j=1 fj
(3.7)
A drawback of this procedure is the appearance of an individual whose fitnessis much better than the remaining individuals. Such super-individuals canquickly take over the population. To avoid this, the best option is using anon-fitness-proportionate mechanism.
• Ranking Selection: In this technique, the individuals are ranked according totheir fitness (best first, worst last), and later selected, e.g., by using StochasticUniversal Sampling [12] which follows the probability showed in Equation 3.8.
pi =1
|P |
[η− + (η+ − η−)
i− 1
|P | − 1
](3.8)
Where pi is the probability of selecting the ith best individual, and η−+η+ = 2.
54

3.3. ALGORITHMS USED IN THIS WORK
• Tournament Selection: In this case, α individuals are sampled at random, andthe best of them is selected for reproduction. This is repeated as many timesas needed. The tournament size (α) determines the selective pressure, thehigher α, the stronger the selective pressure. These unproportionate selectionmethods have the advantage of being insensitive to fitness scaling problemsand to the sense of optimization (maximization or minimization). The maindrawback is the need to set the parameter α, although the widely used valueis two (binary tournament).
After selecting the parents, their chromosomes are combined, using recombina-tion and mutation operators.
Recombination is a process that models information exchange among severalindividuals (typically two). This is done by constructing new solutions using theinformation contained in a number of selected parents. The resulting individualsare called offspring. There exists several recombination operators, the most usedfor bitstrings are the classical single-point crossover and two-point crossover (seeFigure 3.5). Usually, the crossover operator does not apply to all pairs of individualswho have been selected, they are applied to a certain proportion of them with acertain probability. In the case where the operator does not apply crossover, theoffspring is obtained by simply duplicating the parents.
a) Single-point Crossover
b) Two-point Crossover
Figure 3.5: Widely used crossover operators.
The mutation operator is applied to each individual of the offspring separately.This operator injects new material in the population, but at low rate, otherwise thesearch would degrade to a random walk in the solution space. As it was the casefor recombination, the choice of a mutation operator depends on the representation
55

CHAPTER 3. METAHEURISTICS
used, and it is used just in a portion of the chromosome. In bitstrings (and in general,in linear strings) mutation is done by randomly substituting the symbol containedat a certain position by a different symbol. Figure 3.6 shows the mutation of thefifth gene of the chromosome.
Figure 3.6: Mutation operator over one gene.
After the evaluation of the offspring (Line 7), the replacement step is carried outto keep the population size constant. To do so, some individuals from the popula-tion have to be substituted by some of the individuals created during reproduction(offspring). This can be done in several ways [102]:
• Replacement-of-the-worst : the population is sorted according to fitness, andthe new individuals replace the worst ones from the population.
• Random replacement : the individuals to be replaced are selected at random.
• Tournament replacement : a subset of α individuals is selected at random, andthe worst one is selected for replacement. Notice that if α = 1 we have randomreplacement.
• Direct replacement : the offspring replace their parents.
There are two ways to do this task which define two different genetic algorithms:steady state GA (ssGA) and generational GA (genGA). In the first one, every indi-vidual asynchronously replaced after generation. genGA defines the replacement ofgenerations, that is, all individuals are updated at once at the end of each generation.
GAs have been thoroughly used in many domains obtaining satisfactory results.For example, GAs have been applied to solve problems such as the scheduling andtimetabling [116], the software project management [7], the ARN structures predic-tion [140], etc. GAs have been applied to the field of MANET/VANET networks tosolve problems such as the location of base stations [85], the energy consumption ofrouting protocols [142] or the optimization of broadcasting protocols [6].
56

3.3. ALGORITHMS USED IN THIS WORK
3.3.3 Evolutionary Strategies (ES)
Evolutionary Strategies (ES) are Evolutionary Algorithms (EA) specifically designedto solve real parameterization optimization problems. They were presented in 1964at the Technical University of Berlin (Germany) and developed in the 70s by IngoRechenberg [120] and Hans-Paul Schwefel [122]. As EAs, they use mutation, recom-bination, and selection applied to a population of individuals containing candidatesolutions in order to evolve iteratively better and better solutions.
The first purposed ES selected just one individual (parent) to create one new(individual) offspring (see Figure 3.7). This strategy is denoted (1 + 1)− ES. Thenew population accepts the best individuals (parent or offspring) according to theEquation 3.10. Thus, less fit individuals have zero chance of survival. In (1+1)−ES,the new individual is generated by the next equation:
ygi ← xg
i +N(0, σ) (3.9)
where N(0, σ) is a vector of random numbers with a Gaussian distribution withmean zero and standard deviation σ. Algorithm 3 shows the whole process of(1 + 1)− ES.
xg+1i ←
ygi si fitness(yg
i ) ≤ fitness(xgi ),
xgi en otro caso.
(3.10)
Algorithm 3 Evolution Strategies (ES)1: s0 ← initializePopulation()2: evaluar(s0)3: while g < maxGenerations o stopCondition do4: s′g ← mutation(sg)5: evaluation(s′g)6: if fitness(s′g) is better than fitness(sg) then7: sg ← s′g
8: end if9: end while
However, the mutation by itself does not have the ability to combine the geneticinformation of the best individuals, so it is also necessary to introduce crossoveroperators. Thus, the first type of amultimembered ES was proposed, the (µ+1)−ESor steady-state ES. There are µ parents at a time. Two of them are chosen at random
57

CHAPTER 3. METAHEURISTICS
and recombined to give life to an offspring, which also underlies mutation. Theselection resembles extinction of the worst, may it be the offspring or one of theparents, thus keeping constant the population size.
Figure 3.7: Operation of a typical ES.
Subsequently, Schwefel proposed the use of two multimembered strategies called(µ + λ) − ES and (µ, λ) − ES where µ indicates the population size and λ theoffspring size [102]:
• in the (µ+λ)−ES, not only one offspring is created at a time or in a generation,but λ ≥ 1 descendants, and, to keep the population size constant, the λ worstout of all µ+ λ individuals are discarded;
• in the (µ, λ)−ES, the selection takes place among the λ offspring only, whereastheir parents are forgotten no matter how good or bad their fitness was com-pared to that of the new generation. Obviously, this strategy relies on a birthsurplus, i.e., on λ > µ in a strict Darwinian sense of natural selection.
Since the GAs described in Section 3.3.2, the ESs belong to EAs. Althoughthey belong to the same family of algorithms there are some important differencesbetween them [123]:
• ESs are applied to real parametric optimization problems, but GAs are mostlyapplied to optimization of attributes.
• The key operator of the GA is the recombination, however the most importantoperator in ES is the mutation.
58

3.3. ALGORITHMS USED IN THIS WORK
• By default, the replacement in the GA is stochastic, in the ES is deterministic.
• GAs are global search mechanisms, that is, they have trouble on fine adjust-ment, just the opposite happens with ES.
The application of evolutionary strategies is closely linked to its nature of being atool for parametric optimization of functions. However, they also have been appliedto circuit partitioning problems [62], design of materials [119] or neural networktraining [13]. It has also been used in the field of mobile ad-hoc networks usingthem to improve the performance of AODV routing protocol [77].
3.3.4 Particle Swarm Optimization (PSO)
Particle Swarm Optimization algorithms are inspired by the social behavior of birdflocking and fish schooling. More precisely, PSO is a parallel evolutionary compu-tation technique that provides a collaborative population-based search model (seeAlgorithm 4). Individuals of the population called particles fly around in a multidi-mensional search space. During flight, each particle adjusts its position according toits own experience and according to the experience of a neighboring particle, mov-ing toward the best position encountered by itself or its neighbors. Thus, the PSOsystem combines local search methods (through self-experience) with global searchmethods (through neighboring experience), attempting to balance exploration andexploitation [102].
Generally, a particle pi is composed by three vectors and two fitness values:
• xi = 〈xi1, xi2, ..., xin〉 and pBesti = 〈pi1, pi2, ..., pin〉 store its current positionand the best solution of the particle, respectively.
• vi = 〈vi1, vi2, ..., vin〉 is the gradient vector (direction) which defines the nextmovement of the particle pi.
• The two fitness values are the current one (fitness_xi) and the value of thebest local solution found so far (fitness_pBest).
In this algorithm, each particle position xi is updated each generation g by meansof the Equation 3.11.
xig+1 ← xi
g + vig+1 (3.11)
59

CHAPTER 3. METAHEURISTICS
where factor vig+1 is the velocity of the particle and is given by
vig+1 ← w · vi
g + ϕ1 · (pig − xi
g) + ϕ2 · (bg − xig) (3.12)
In this formula, pig is the best solution that the particle i has stored so far, bg is
the best particle (also known as the leader) that the entire swarm has ever created,and w is the inertia weight of the particle (it controls the trade-off between globaland local experience). Finally, ϕ1 (cognitive component) and ϕ2 (social component)are specific parameters which control the relative effect of the personal and globalbest particles (ϕ1 = ϕ2 = 2 · UN(0, 1)).
Algorithm 4 describes the pseudo-code of PSO. The algorithm starts by initial-izing the swarm (Line 1), which includes both the positions and velocities of theparticles. The corresponding pi of each particle is randomly initialized, as well asthe leader b (Line 2). Then, during a maximum number of iterations, each particleflies through the search space updating its velocity and position (Lines 5 and 6), itis then evaluated (Line 7), and its pi is also calculated (Line 8). At the end of eachiteration, the leader b is updated.
Algorithm 4 Pseudocode of PSO1: initializeSwarm()2: locateLeader(b)3: while g < maxGenerations or stopCondition() do4: for each particle xi
g do5: updateVelocity(vi
g) //Equation 3.126: updatePosition(xi
g)// Equations 3.117: evaluate(xi
g)8: update(pi
g)9: end for10: updateLeader(bg)11: end while
The particles movement is showed in Figure 3.8. Where the dotted arrows repre-sent the direction of the current velocity vectors: vpBest
g (velocity of the best positiontaken by the particle), vk
g (velocity of the best particle found in the neighborhood),and vi
g (current velocity of the particle). The arrow line represents the directiontaken by the particle to move from point xi
g to point xg+1i . The change in direction
of the arrow is due to the influence of other directions (gradient) involved in themovement.
60

3.3. ALGORITHMS USED IN THIS WORK
Figure 3.8: Particle movement from point xig to point xi
g+1 in the search space (PSO).
PSO may be configured in different ways defining different variants of this algo-rithm. Kennedy in [71] defined four main variants depending on the influence of thevalues of the cognitive and social components (ϕ1 and ϕ2). They are the followingones:
• Full Model: ϕ1, ϕ2 > 0. The movement is determined by both the cognitiveand social component.
• Cognition-only Model: ϕ1 > 0 y ϕ2 = 0. Only the cognitive component isinvolved in the movement.
• Social-only Model: ϕ1 = 0 y ϕ2 > 0. Only the social component is involved inthe movement.
• Exclusive Social Model: ϕ1 = 0, ϕ2 > 0 y xi 6= gi. The position of the particleitself can not be the best in its environment.
According to [72] the sum of the values of the cognitive and social components ofPSO (ϕ1 and ϕ2) should be about 4.0, and common usage is to set them 2.05 each.
This technique has been applied to problems of optimization of numerical func-tions [42] training neural networks [138], traveling salesman problem [125], and im-age processing [104]. In turn, it has been used as the basis for managing the linksbetween nodes in VANET [61].
61

CHAPTER 3. METAHEURISTICS
3.3.5 Differential Evolution (DE)
Differential Evolutions is the youngest technique used to carry out the work pre-sented here. It appears in 1994 when Kenneth Price tried to solve the Chebyshevpolynomials [32]. Then, Price came up with the idea of using vector differences forperturbing the vector population. Since this seminal idea a lively discussion betweenKen Price and Rainer Storm and endless ruminations and computer simulations onboth parts yielded many substantial improvements which make DE the versatile androbust tool it is today [128].
DE is a stochastic population based optimization algorithm. It is employed tosolve problems in continuous (real) search spaces (real parameters, real valued func-tions). DE optimizes a problem by maintaining a population of N vectors vg
i (whereg is the generation number and i ∈ [1, N ]) that represents the candidate solutions.The creation of new candidate solutions is carried out by combining existing vectorsaccording to its simple formulae of differential-crossover and differential-mutation,and then keeping whichever candidate solution has the best fitness on the optimiza-tion problem at hand.
The differential-mutation generates new individuals by adding the weighted dif-ference of two of the vectors of the population to the third, following the Equa-tion 3.13:
wg+1i ← vg
r1 + µ · (vgr2 − v
gr3). (3.13)
Where r1, r2, r3 ∈ {1, 2, . . . , i − 1, i + 1, . . . , N} are random integers mutually dif-ferent, and also different from the index i, the mutation constant µ > 0 stands forthe amplification of the difference between the individuals vr2
g and vr3g , and it avoids
the stagnation of the search process.
In order to increase even more the diversity in the population, each mutatedindividual undergoes a crossover operation with the target individual vi
g, by meansof which a trial individual ui
g+1 is generated. A randomly chosen position is takenfrom the mutant individual to prevent that the trial individual replicates the targetindividual.
uig+1(j)←
wig+1(j) if r(j) ≤ Cr or j = jr,
vig(j) otherwise.
(3.14)
62

3.3. ALGORITHMS USED IN THIS WORK
As shown in Equation 3.14, the crossover operator randomly chooses a uniformlydistributed integer value jr and a random real number r ∈ (0, 1), also uniformlydistributed for each component j of the trial individual ui
g+1. Then, the crossoverprobability Cr and r are compared just like j and jr. If r is less than or equalthan Cr (or j is equal to jr) then we select the jth element of the mutant individualto be allocated in the jth element of the trial individual ui
g+1. Otherwise, the jth
element of the target individual vig becomes the jth element of the trial individual.
Finally, a selection operator decides the acceptance of the trial individual for the nextgeneration if and only if it yields a reduction in the value of the evaluation function(also called fitness function f()), as shown by the following Equation (3.15):
vig+1 ←
uig+1 if f(ui
g+1) ≤ f(vig),
vig(j) otherwise.
(3.15)
Algorithm 5 shows the pseudo-code of DE. After initializing the population(Line 1), the individuals evolve during a number of generations (maxGenerations).Each individual is then mutated (Line 5) and recombined (Line 6). The new indi-vidual is selected (or not) following the operation of Equation 3.15 (Lines 7 and 8).
Algorithm 5 Pseudocode of DE1: initializePopulation()2: while g < maxGenerations or stopCondition() do3: for each individual vi
g do4: choose mutually different(r1, r2, r3)5: wi
g+1 ← mutation(vr1g , v
r2g , v
r3g , µ)
6: uig+1 ← crossover(vi
g, wig+1, cp)
7: evaluate(uig+1)
8: vig+1 ← selection(vi
g, uig+1)
9: end for10: end while
DE has been applied to various classical optimization problems with knownglobal optimum[113], also problems of industrial processes optimization, task al-location [10], and to the design of wireless networks[114] or other problems such asthe training of neural networks [2].
63

CHAPTER 3. METAHEURISTICS
64

Chapter 4
VDTP Protocol OptimizationProblem
VANET networks are composed of a set of nodes (vehicles and roadside infrastruc-ture elements) that are connected by technologies based on IEEE 802.11 standards.This means that nodes can only communicate within a limited space and time. Fur-thermore, the continuous movement of vehicles at high speeds causes highly variabletopologies. It is therefore crucial to find the optimal configuration settings of theprotocols that they use to maximize the transfer of information and the bandwidthof such networks.
In Section 4.1, we present the file transfer service which is one of the mostfrequently used in networks. For this reason, offering an optimal configuration iscritical in VANETs. Section 4.2 introduces the VDTP file transfer protocol used inVANET networks. The principal objective of this Thesis is to solve the problem ofoptimizing the VDTP protocol presented in Section 4.3.
4.1 File Transfer in VANETs
File transferring is always an interesting service in every communication networkbecause of the wide range of applications that could make use of it, in particular, forVANETs primary applications: transport traffic management, local weather data,and information broadcasting/sharing. However, achieving successful transfers inVANETs is a challenging task owing to the special characteristics of this kind ofnetworks (see Section 2.2). Therefore, it is necesary to take into consideration thefollowing requeriments when building a reliable file tranfer protocol for VANETs [23]:
65

CHAPTER 4. VDTP PROTOCOL OPTIMIZATION PROBLEM
• Connection-oriented communication protocols, such as TCP, are designed forstatic networks. Therefore, the use of these kinds of protocols in a highly dy-namic environment, such as VANETs, would induce significant control over-head for connection maintenance, resulting in increasing network traffic andlow effectiveness.
• Due to the changing network topology, the sender location may change duringa file transfer. Therefore, it is essential to keep the complete control over thetransfer on the receiver side.
• In the absence of fixed infrastructures, nodes have to cooperate to providerouting services, relying on each other to forward packets to their destination.Routing protocols designed for the fixed network are not effective in mobileenvironments. Hence, a wide variety of routing protocols for mobile ad hocnetworks (MANETs) have been designed and studied, e.g., DSR, AODV orDSDV (see Section 2.4.3). The selection of a suitable ad hoc network routingprotocol is crucial for a reliable file transfer.
• For the transfer, files should be split into several blocks. Therefore, receivermay temporally stops the transfer because of the likely disconnections with thesender. A mechanism for avoiding indefinited waiting for lost packets shouldbe also provided.
However, even the file transfer protocol meets the requirements presented above,it does not ensure a correct and complete information transfers. Hence, there is theneed to optimize these protocols to achieve the best performance of these protocols.
Optimizing a protocol is defined as finding the configuration of its parametersthat offers the best performance of this protocol. In this Master Thesis we treatedthe problem of optimizing VDTP file transfer protocol (OFTC problem).
4.2 VDTP Protocol
VDTP (Vehicular Data Transfer Protocol) is a not connection-oriented file transferprotocol used in VANET networks. VDTP was developed by NEO1 research groupat University of Málaga [23]. This section presents the operation of VDTP as wellas the different parameters required for its configuration.
1NEO (Networking and Emerging Optimization) - http://neo.lcc.uma.es/
66

4.2. VDTP PROTOCOL
4.2.1 VDTP Protocol Operation
Using VDTP file transferring comprises two phases: information requestingphase and data requesting phase. Moreover, the nodes that participates ina file transfer are named differently according to their roles during the communica-tion. When a file is being transferred, the node containing the file is identified asfile owner whereas the node requesting the file is named file petitioner. On theone hand, file transferring is controlled by the file petitioner. On the other hand, fileowner is only in charge of replying petitioner requests. The file petitioner requestsa certain section of the file and the file owner sends it, this process is repeated untilcompleting the entire file transfer.
The first phase of the file transfer begins when the file petitioner node sends aFIRQ (File Information Request) packet to the file owner node that stores the fileto be downloaded. The file owner node reply with a FIRP (File Information Reply)packet, that encapsulates metadata about the file (see Figure 4.1). The metadatacontains information including the size of the file and the size of data blocks (chunks)the file will be split in.
Figure 4.1: Information requesting phase of VDPT protocol.
The petitioner is now waiting for the file information coming from the owner. Thefile information will be hopefully received in a FIRP packet starting data requestingphase. Then, the file petitioner calculates the number of segments in which the filewill be split, dividing the file size by the block size, and it also decides the nextdata segment to download. The petitioner requests this data segment i by sending aDRQ(i) (Data Request) packet to the file owner. Then the node, which stores thefile, encapsulates the requested data block i in a DRP(i) (Data Reply) packet andit sends it to the file petitioner node. The exchange of DRQ(i) and DRP(i) packetsis repeated until the file petitioner node receives the last chunk of the requested file(see Figure 4.2). Note that each data segment is requested individually, and thenext data segment is not requested until the current one is already received. Thewhole process finishes when all data segments are downloaded.
67

CHAPTER 4. VDTP PROTOCOL OPTIMIZATION PROBLEM
Figure 4.2: General operation during data requesting phase of VDTP protocol.
Packet delivery is likely to fail due to the hostile communication medium. There-fore, VDTP provides a set of timers and counters in charge of solving problemsconcerning packet or connection lost. The timers control the timeout for receivingdata after sending a request packet (FIRQ or DRQ). After this timeout, the requestpacket is resent (see Figure 4.3) to the file owner. In turn, the counters are usedto control the number of times a packet has been retransmitted. The counters areinitialized to the maximum value assigned to them and they decrease every timethe petitioner node retransmits the same packet. If the counter falls to zero, it isconsidered that the download failed because the connection is lost with file ownerand the whole process is aborted (see Figure 4.3.b).
a) DRQ(i) retransmission after timeout. b) Download failed after n DRQ(i).
Figure 4.3: VDTP operation with lost packets.
68

4.2. VDTP PROTOCOL
The packets used by this protocol have the format showed in Figure 4.4. Thepacket header fields are discussed below:
• pack_type: It indicates which type of VDTP packet is being carried (FIRQ,FIRP, DRQ or DRP).
• file_id: It identifies the file which is being transfered.
• num_sec: It indicates the chunk sequence number that is requested/replyed.
• bloc_size: Bloc data size requested/replyed.
The packet data field (DATA) is used to transfer the string of bits that is part ofa particular data block or the information that is sent in FIRQ and FIRP packets.
Figure 4.4: Basic structure of VDPT packet.
4.2.2 VDTP Protocol Configuration
VDTP is configured through three different parameters: the size of data blocksused to send the file (chunk_size), the timeout between retransmissions of a re-quest packet (retransmission_time), and the maximum number of retransmissionsper packet (max_attempts). Next, we present in more detail these parameters.
The size of the data blocks or chunk size is the number of bytes data located inthe packet and it is between 128 and 524,288 bytes (524,288 bytes = 512 Kbytes).This parameter affects the number of data packets (DRQ(i) and DRP(i)) neededto transfer files. Since when the chunk size decreases, the number of data packetsexchanged to transfer a file increases and therefore reducing the effective bandwidthof the network. However, by increasing the block size the possibility of packetloss during data transfer increases. Because more time is needed to transfer datapackets completely, which means that the link between vehicles must exist longer,something critical in networks that do not have any infrastructure and with highlyvariant topology as VANETs.
69

CHAPTER 4. VDTP PROTOCOL OPTIMIZATION PROBLEM
The timeout between retransmissions is between one and ten seconds, becausea data block of a few Kbytes do not need longer to be transferred. When this timeincreases the file requester node needs longer to detect that a packet is lost andthereby to resend the request packets, increasing the total time required for filetransfers, and thus decreasing the effective bandwidth of the network. However, iftime is not long enough, some packets may be considered as lost when they simplyneed a longer time than expected to reach the file requester node, so that unneces-sary data (request packets) will flow through network, overloading it.
The maximum number of retransmissions per packet is between 1 and 250. Ifthe number is high, packets of data requests may be sent to a file owner node afterlosing the link between them, overloading the network with these packets and thusreducing its effective bandwidth. In contrast, if the number is small, it may abortfile transfers between nodes that simply have a temporary problem that caused thepacket loss, but there remains a link between them.
The selection of values that are given to the VDTP configuration parametersmust be carried out carefully, since these parameters, as explained above, directlyinfluence the performance and quality of service provided by the protocol.
4.3 OFTC Problem Definition
The problem addressed in this Thesis is to find the optimal parameter settings forVDTP protocol to perform the best file transfer peer-to-peer in VANETs. This prob-lem has been called Optimal File Transfer Protocol Configuration problem (OFTC).In order to solve OFTC we have used five different metaheuristic techniques thatrequire the definition of a search space and objective function (or fitness). In thissection we present both.
4.3.1 Search Space
The search space is given by the configuration parameters of the protocol. VDTPprotocol parameter settings directly influence the quality of service provided (seeSection 4.2.2). The exhaustive search of the search space is a task almost imprac-ticable because of the huge set of possible configurations. So far, experts from theCARLINK consortium [22] have used a process of trial and error to get the settingsthey have used in the experiments [24, 28, 29, 27].
70

4.3. OFTC PROBLEM DEFINITION
Since we are interested in finding the best possible VDTP configuration, we havefocused on the three aforementioned parameters: chunk_size, retransmission_time,and number of max_attempts. Therefore, a given configuration (representing asolution of the problem) is a vector of three values Ci = (chunk_size, total_attempts,retransmission_time). The range of each parameter is:
• chunk_size: N+ ∈ [128 · · · 524, 288]
• total_attempts : N+ ∈ [1 · · · 250]
• retransmission_time: R+ ∈ [1 · · · 10]
Thus the search space of the problem is defined by three-dimensional space C,where each dimension is the representation of each components of the vector Ci.
4.3.2 Fitness Function
The performance of VDTP can be measured by the amount of data being trans-ferred correctly (data_transferred). However, there are other metrics to be takeninto account as the number of lost packets during the transfer of a file (lost_packets)and the total time required for the transfer of an entire file (transmission_time). Inorder to make a more accurate measurement of the quality of the files transfers wehave used these three metrics.
In order to evaluate performance of a file transfer, we have defined a functionthat returns a numeric value from the three metrics presented above. This functionis given by:
fi =transmission_timei + lost_packetsi
log(data_transferredi + K)(4.1)
The factor K = 2 avoids division zero if there is no data transference, prevent-ing a possible error in the fitness calculation. The data transferred is presented inlogarithmic scale in order to make up for the difference in the range of values. Thisway, the algorithm looks for minimizing the global fitness2.
The problem consist on finding a valid configuration Ci that satisfies the followinginequality:
f(Ci) ≤ f(Cj), ∀Cj ∈ C (4.2)
2A multi-objective evaluation [37] was not taken into account since objectives are not necessarilyopposed in this work.
71

CHAPTER 4. VDTP PROTOCOL OPTIMIZATION PROBLEM
That is, the OFTC problem is a minimization problem where we want to minimizethe fitness function defined by Equation 4.1 subject to the restrictions of the searchspace C.
As file transfers are very dependent on the scenario in which vehicles are located,we have decided that the evaluation of a given configuration is made on a number(N) different transfers using this configuration. Therefore, the fitness function tobe minimized to obtain the optimal configuration of VDTP protocol is given by thefollowing expression:
f =1N
N∑i=1
fi =1N
N∑i=1
transmission_timei + lost_packetsi
log(data_transferredi + K)(4.3)
In order to obtain the metrics that are necessary for the evaluation of the fN
function we have used a VanetMobiSim/Ns-2 VANET network simulator (seeSection 2.6.2).
In this chapter we have defined the basis of the problem of optimizing the peer-to-peer file transfer protocol in VANETs. In subsequent chapters we present boththe experiments using metaheuristic techniques and the results obtained.
72

Chapter 5
Experiments
This chapter presents the methodology used to solve the problem of optimizing thepeer-to-peer information transfer in VANET networks by using VDTP protocol. Theaim of this chapter is to provide all information necessary to enable the repetitionof the experiments carried out in this Thesis. The chapter is organized as follows:Section 5.1 gives an overview about the experiments. Then, Section 5.2 shows thesoftware and hardware tools used for both, the development and the executions.Finally, Section 5.3 presents the metrics used to compare the performance of thedifferent algorithms.
5.1 Optimization Framework
The optimization framework for this problem is composed by two main parts: anoptimization algorithm and a simulation procedure. The optimization part is car-ried out by (independently) one of the five algorithms described in Section 3.3. Allof them are specially adapted to find optimal (or cuasi-optimal) solutions in con-tinuous search spaces (which is the case in this work). The simulation process is away of assigning a quantitative quality value to the factors regulating VDTP, thusleading to optimal configurations of this protocol tailored to a given scenario. Thisprocedure is carried out by means of the ns-2.31 [98] simulator (see Section 2.6) inwhich we have implemented the VDTP protocol for transferring files in VANETs.
In each optimization algorithm, the evaluation of the solutions is carried out bymeans of the simulation component. As Figure 5.1 illustrates, when a given algo-rithm generates a new solution it is immediately used for configuring the VDTP ina given simulation. After the simulation, ns-2 returns the global information about
73

CHAPTER 5. EXPERIMENTS
the transmission time required for transferring files, the number of lost packets gen-erated during the simulation, and the amount of data exchanged between vehicles.This information is used to compute the fitness function presented in Section 4.3.
Figure 5.1: Optimization framework for VDTP configuration in VANETs, where thealgorithms invoke the ns-2 simulator for each solution evaluation.
5.1.1 Instances: VANET Scenarios
One of the most important and critical task to solve the problem is to obtain themetrics necessary to evaluate the performance of a particular VDTP configuration.This evaluation has been carried out by using the simulator VanetMobiSim/Ns-2(see Section 2.6).
In order to obtain results close to the real world, we have defined two simulationVANET scenarios (instances) from real areas of Málaga in Spain (see Figure 5.2),creating an urban and a highway scenarios. We have defined this two distinct sce-narios since the characteristics of the movement of vehicles for these two scenariosare different enough to affect the transfer of files. For example, in urban areas thevehicles density is higher and these vehicles travel at lower speeds than in interurbanenvironments, increasing the likelihood that the transfers are carried out successfullyin urban than in the highways. Therefore, we can analyze in both scenarios the be-havior and performance of the compared algorithms, as well as the differences in theresulting VDTP configurations in terms of communication efficiency. Furthermore,we can compare these automatically generated configurations against the ones usedin the real experiments by human experts of CARLINK Consortium [26, 25].
74

5.1. OPTIMIZATION FRAMEWORK
a) Urban scenario map
b) Highway scenario map
Figure 5.2: Selected areas of Málaga for our VANET simulations.
The urban instance covers an area of 120,000 m2 (Figure 5.2.a) including build-ings and semaphores. Whereas that the highway scenario covers a stretch of 1 kmwith two directions (Figure 5.2.b) without buildings and semaphores. In both sce-narios there are 30 vehicles moving through the roads, ten of those are trying todownload a file that is stored in other ten vehicles, which is equivalent to simulateten different transfers on the same scenario. Vehicles on the urban scenario travelat speeds between 30 km/h and 50 km/h. However, vehicles on highway roads doso at speeds ranging from 80 km/h and 110 km/h (see Figure 5.3).
The vehicles try to transfer 1 Mbyte (1,024 Kbytes) files. However, the transfermay be of less data, if the communication is rejected (see Section 4.2.1). Thecommunications between the vehicles is conditioned by the use of IEEE 802.11bstandard network interfaces [53]. To obtain more realistic results, we have used thereal characteristics of the PCMCIA PROXIM ORiNOCO - Classic Gold1 networkinterface which has been connected to an omnidirectional antenna with a gain of 7dBi. Other features of the protocols used to deploy the VANET are summarized inTable 5.1.
1ORiNOCO Classic Gold PC Card: http://www.proxim.com/products/wifi/client/goldpccard/
75

CHAPTER 5. EXPERIMENTS
a) Urban scenario representation
b) Highway scenario representation
Figure 5.3: Málaga areas representation by using VanetMobiSim for their simulation.
Table 5.1: VANET instance specification
Parameter ValueNumber of vehicles 30Number of file transfers 10Link Layer: Network Interface PROXIM ORiNOCO - Classic Gold (802.11b)Link Layer: antenna gain 7 dBi (Omnidirectional)Routing Protocol DSR Protocol [69]Transport Protocol DSR Protocol [69]Application Protocol VDTP Protocol [23]
Using a simulator for the task of evaluating solutions introduces a new issue tokeep in mind, the algorithm runtime. The simulation requires a high computationtime, increasing the execution time of algorithms critically. In order to resolve thisproblem we have executed the algorithms using a cluster to parallelize the differentindependent runs (see Section 5.2).
76

5.1. OPTIMIZATION FRAMEWORK
5.1.2 Algorithms Parameter Settings
In order to compare the performance of the five studied algorithms solving OFTCproblem we have executed them on an equal footing. For this reason in our exper-iments, they have the same Stop Condition: 1,000 solution evaluations (VANETsimulations) per run. Therefore, the population based algorithms (PSO, DE, GA,and ES) were configured with 20 individuals, performing 50 generational steps(20 individuals × 50 generations = 1, 000 evaluations); and SA performs 1,000generations. In turn, the comparison is done from 30 independent runs performedof each of the algorithms to compare more representative results.
The parameterization of the SA and PSO algorithms used to solve the OFTCproblem are presented in tables 5.2 and 5.3, respectively.
Table 5.2: Parameterization of SA optimization algorithm.Parameter Symbol ValueNumber of Independent Runs 30Number of Generations 1,000Temperature Decay α 0.8Markov Chain Size 5
Table 5.3: Parameterization of PSO optimization algorithm.Parameter Symbol ValueNumber of Independent Runs 30Number of Generations 50Population Size 20Local Coefficient ϕ1 2·rand(0,1)Social Coefficient ϕ2 2·rand(0,1)Inertia Weigh w 0.5
For the other algorithms, we have to configure some different parameters aswhich types of selection/replacement methods they use. The implemented geneticalgorithm selects the parents by using two different methods: the first progenitoris selected by using tournament selection and the second one by ranking selection.DE and ES selects both parents randomly. These three algorithms replace eachindividual after generation asynchronously. Other configuration parameters for thealgorithms GA, ES, and DE are specified in Table 5.4.
77

CHAPTER 5. EXPERIMENTS
Table 5.4: Parameterization of GA, ES, and DE optimization algorithms.Algorithm Parameter Symbol Value
Number of Independent Runs 30All Number of Generations 50
Population Size 20
GA Crossover Probability Pcru 0.8Mutation Probability Pmut 0.2
ES Crossover Probability Pcru 0.9Mutation Probability Pmut 0.1
DE Crossover Probability Cr 0.9Mutation Factor µ 0.1
5.2 Software and Hardware Tools
This section presents the distinct tools necessary for the implementation and exe-cution carried out in our experiments.
5.2.1 MALLBA Library
The development of all algorithms used in this project has been carried out by usingMALLBA [4], a C++ based framework of metaheuristics for solving optimizationproblems. This framework provides a set of skeletons for combinatorial optimizationthat can be extend easily. MALLBA offers for each algorithm a skeleton formed by aset of classes that interact each other to solve the optimization problem instantiated.Skeletons are implemented by a set of required and provided classes that representan abstraction of the entities participating in the resolution method.
• Provided Classes implement the basic functionality of the algorithm, thatis, the internal aspects of the skeleton in a problem-independent way.
• Required Classes present the specific behavior and information of the prob-lem. The interface of these classes is unique and pre-established to allowinteraction with the provided classes. This part of the skeleton has to beimplemented from the problem objective.
Although the skeleton may vary according to the algorithm, all the skeletonscoincide with a core set of classes. The UML diagram (Figure 5.4) presents theClass Diagram of the core of MALLBA.
78

5.2. SOFTWARE AND HARDWARE TOOLS
Required Classes
Figure 5.4: Common design of Mallba skeletons.
In this Thesis we have developed all classes needed to use the optimizationalgorithms presented before, however we have not implemented Solver_Lan andSolver_Wan since we have not solved this problems using parallel implementations.
5.2.2 Optimizing VDTP by using VanetMobiSim/Ns-2
The selected simulator, VanetMobiSim/Ns-2, allows the users to add new featuresas protocols or functionalities. This characteristic is important since VDTP is notincluded in this simulator. In order to solve this problem, ns-2 has been extendedwith VDTP protocol definition. This has been carried out developing the protocolusing the programming languages OTcl and C++ (see Section 2.6.2). OTcl hasbeen used to define the packet protocol identifier and the VDTP default values forparameters settings. For fhis purpose we have modified two files: ns-packet.tcl
and ns-default.tcl (see Listing 5.1), respectively. In C++ has been developedthe protocol operation, as well as the link between C++ and Tcl interpreter of thesimulator. The implementation in C++ is based on developing different classes thatinherit from some classes provided by ns-2 (see Figure 5.5).
Listing 5.1: ns-default.tcl code modification
Appl i cat ion /VDTP set chunk_size_ 25600 # 256 KbytesAppl i cat ion /VDTP set f i l e_s i z e_ 1048576 # 1 MbyteAppl i cat ion /VDTP set max_attempts_ 8 # 8 at temptsAppl i cat ion /VDTP set max_waitingtime_ 8 # 8 seconds
79

CHAPTER 5. EXPERIMENTS
Figure 5.5: Classes developed to simulate VDTP in ns-2.
This classes implement different aspects necessary to simulate VDTP by usingns-2 simulator:
• VDTPappClass: It is the interface between the Tcl simulation and the protocoldefinition.
• VDTPData: It implements the header of VDTP packet and the management ofits fields.
• VDTPDataS: It defines the whole VDTP packet and the interaction betweenthe upper and lower levels of this protocol.
• AskPacketTimer: Necessary to get the times and timers used to send FIRPand DRP packets (see Section 4.2.1).
• AckTimer: Necessary to get the times and timers used to send FIRQ and DRQpackets (see Section 4.2.1).
• VDTPapp: It implements the whole VDTP protocol operation.
80

5.2. SOFTWARE AND HARDWARE TOOLS
In turn, we have added a new functionality to ns-2, which it is used to returnthe metrics needed for evaluating the fitness function of a given configuration. Afterthe implementation of all these classes, the simulator had to be compiled. Then,we were able to use the VDTP protocol for transferring files in VANET networks.Therefore, ns-2 were ready to be used in the optimization process (see Figure 5.1).
5.2.3 Parallel Executions by using Condor
One of the main problems associated with use of simulation to evaluate the fitnessfunction is the required execution time. The execution of our experiments has beencarried out by using PC machines with Pentium IV 2.4GHz core, 1GB of RAM,and O.S Linux Fedora core 6. The average execution time needed to simulate thescenarios defined in the previous sections is 4.33 seconds. If the algorithms run 1,000generations and we execute 30 independent runs, the execution time per algorithm is36.08 hours (see Equation 5.1). If that is multiplied by five (number of algorithms)the time needed to get results is over 180 hours. In this computation, we have takeninto account just the fitness evaluation time, we have not considered the computationtimes of all tasks that are running by the optimization algorithms.
timeexperiment = 4.33× 1000× 30 = 129900 seconds = 36, 08 hours (5.1)
We have therefore decided to execute each of the 30 independent runs in parallelbut independently, since the parallelism here is used to decrease the time of exper-imentation. The executions were carried out on a cluster of 250 PC machines witha Pentium IV 2.4 GHz, 1GB of RAM, and OS Linux Fedora Core 6.
As the execution of each each algorithm separately require in average 36,08 hours,we have used a High-Throughput Computing (HTC) environment. Years ago, su-percomputers were used to address the problems that required a lot of resources fora long time. Such systems are capable of dealing with problems that require highcomputation power. However, just the institutions with high budgets might use thissystems because they had very high prices. Nowadays, a collection of interconnectedheterogeneous nodes (machines) can be used to execute tasks in distributed manner.These nodes represent resources, which can be simple personal computers. There-fore, in place of supercomputers, we can use multiple cheap PCs, interconnected viaa network, and simply installing a software that is responsible for distributing thejobs between the different computers.
81

CHAPTER 5. EXPERIMENTS
In this Thesis we have chosen Condor [132] to create the HTC environment.Condor is a freely available project at the University of Wisconsin-Madison, it is de-signed to encapsulate and run large collections of distributed computing resourceswith the ultimate aim of providing more access to available computing power. Con-dor specializes in giving users the ability to run huge numbers of tasks over longperiods of time. When users submit jobs, Condor searches for and finds the availablemachines on the entire network and executes the work on these machines. Condorhas the ability to detect whether a machine that was running a job becomes unavail-able for a while. In addition, the users can set a checkpoint and migrate their worktasks to different machines that are idle or available. The main features of Condorare [16]:
• Starting with version 6.9.5, Condor is released with the Apache License ver-sion 2.0.
• No special programming is required to use Condor. It is able to run normalUNIX programs, only requiring the user to relink, not recompile them orchange any code.
• The local execution environment is preserved for remotely executing processes.Users do not have to worry about moving data files to remote workstationsbefore executing programs there.
• Condor software is responsible for locating and allocating idle workstations.Its users do not have to search for idle machines, nor are they restricted tousing machines only during a static portion of the day.
• Owners of workstations have complete priority over their own machines.
• Users of Condor may be assured that their jobs will eventually complete.
• Measures have been taken to assure owners of workstations that their filesys-tems will not be touched by remotely executing jobs.
• Condor does its work completely outside the kernel, and is compatible withBerkeley 4.2 and 4.3 UNIX kernels and many of their derivatives. Users donot have to run a custom operating system to get the benefits of Condor.
82

5.3. USED METRICS TO COMPARE RESULTS
5.3 Used Metrics to compare Results
The main objective of this Thesis is to solve the problem of optimizing the peer-to-peer transfer of information in VANET networks. For this purpose we have used fivedifferent metaheuristic algorithms (SA, GA, DE, PSO, and ES). Therefore, in thiswork we have also set the objective of evaluating the performance of these differentmetaheuristic techniques in solving the problem, in order to decide which of thealgorithms is best suited to this kind of problems.
We analyze the obtained results separately in the two previously defined sce-narios (urban and highway). The metrics used to compare the performance of thedifferent algorithms are based on the study of the final values of the objective func-tion for each of the 30 independent runs. For our work we have used the mean,standard deviation, median, minimum, and maximum values obtained forthe different algorithms. As a minimization problem, the configuration that obtainsthe minimum fitness value (see Section 4.3) is the optimal. Also, we have used theFriedman test for a comparison of algorithms with statistical significance.
In addition, we have compared the performance of the optimal VDTP config-uration returned for each of the algorithms. In order to do so, we have simulatedVANET instances with the returned configurations in the median value of fitnessminimum of 30 independent runs. Also, we have compared the execution time spentby each algorithm to complete the entire process of finding the optimal VDTP con-figuration. All this study is presented in the next chapter.
83

CHAPTER 5. EXPERIMENTS
84

Chapter 6
Results
This chapter presents the results obtained by applying five metaheuristic algorithmsto the optimization problem of the peer-to-peer transfer of information in VANETnetworks using VDTP (OFTC problem). In such networks, the information trans-fers varie critically depending on the scenario where vehicles are moving, so we havedefined two different scenarios, an urban and a highway, over which it has solvedthe proposed optimization problem.
The chapter is organized as follows: In Section 6.1 we analyze the results interms of objective function for each of the algorithms. The performance study ofeach of the algorithms to solve the problem is presented in Section 6.2. Finally, inSection 6.3 we evaluate the obtained VDTP parameter configurations by simulatingthem.
6.1 Global Results
This section discusses the results obtained by the five algorithms studied when solv-ing the Optimal File Transfer Configuration (OFTC) problem using VDTP. As it isa minimization problem, the lower the fitness value, the better the solution.
Table 6.1 shows the resulting fitness values regarding the urban and highwayVANET scenarios. The third column contains the mean and standard deviation ofthe values returned by the objective function in the 30 independent executions. Inturn, it shows minimum (best fitness), maximum (worst fitness), and median valuesfor each of the algorithms and scenarios.
85

CHAPTER 6. RESULTS
Scenario Algorithm Mean ± Std.dev. Minimum Median MaximumPSO 1.6346 ± 0.2899 0.9077 1.7809 1.8918DE 1.7423 ± 0.3717 0.7389 1.8658 2.0228
Urban GA 1.9086 ± 0.2260 0.8799 1.9731 2.1614ES 2.1517 ± 0.1266 1.8862 2.1222 2.4246SA 2.7850 ± 0.8718 0.8730 2.1663 3.8025PSO 4.1761 ± 0.2556 3.3301 4.2513 4.4554DE 4.6631 ± 0.9328 2.7145 4.2272 7.0531
Highway GA 4.3805 ± 0.8695 2.5345 4.1918 5.8608ES 5.7833 ± 0.9705 3.8836 6.1347 6.9421SA 4.4246 ± 0.7401 3.1498 4.0855 5.7922
Table 6.1: Final fitness values for both VANET scenarios and the five optimizationalgorithms.
For the urban instance, we can observe in Table 6.1 that PSO obtained the bestresult in terms of the mean fitness (1.6346±0.2899). This smallest mean value leadsus to believe that using PSO the resulting VDTP configuration ends in an efficientcommunication which is fast and accurate between vehicles. In addition, the bestmedian and maximum values were also obtained by PSO, although the best mini-mum, i.e., the best VDTP configuration found for urban scenario, was reached byDE (0.7389). This is an expected value, since DE generally shows a pronounced ex-ploitative behavior (using a parametrization close to the standard one) [113], whilePSO tends to have an explorative performance using a high inertia (as in this studyw = 0.5) [1].
In the highway scenario the results are similar, PSO obtained also the best meanfitness value (4.1761± 0.2556). Besides, PSO presents the lowest value of standarddeviation. This implies a considerable advantage, since it provides our model witha high robustness, which is a crucial issue when designing VANETs. In terms ofthe minimum fitness, GA (2.5345) obtained the best VDTP configuration for thisscenario.
As we assumed previously, the difference in results between the two scenarios isquite significant, fitness values obtained in the interurban scenario are more thantwice those obtained in the urban area, that is, the QoS of VDTP protocol is worstin highways. This confirms the assumption that in highways the transfer of infor-mation is more difficult.
86

6.1. GLOBAL RESULTS
In order to provide a comparison with a statistical meaning we have applied astatistical test. Such tests may be parametric or nonparametric [124]. A parametrictest is one that uses real-valued data belonging to an interval. However, it may bethe case that one or more initial assumptions for using parametric tests fail, causingthe loss reliability statistical analysis. In order to use a parametric test it is neces-sary that the distribution satisfies the conditions of independence, normality, andheteroscedasticity [45].
The condition of normality checks whether a data set is well-modeled by a nor-mal distribution or not, or to compute how likely an underlying random variableis to be normally distributed [45]. In this work we have used Kolmogorov-Smirnovtest (KS-test) [90]. This test compares the cumulative distribution of observed datawith the expected cumulative distribution of a Gaussian distribution. As in anyhypothesis test, the null hypothesis is rejected when the p− value exceeds a criticalvalue obtained from a probability table. In order to perform these statistical testswe have used SPSS1.
Table 6.2 shows the results of applying Kolmogorov-Smirnov test to the resultsof the five metaheuristic algorithms for boths scenarios. We have performed this testwith confidence level of 95% (p−value = 0.05). As we can see in the second columnof Table 6.2 (the asymptote) there are samples that do not satisfies the test (DE inurban scenario and SA and PSO in highway scenario). Finally, we have applied anon-parametric test because the distributions violate the condition of normality.
Scenario Algorithm Z of K-S Asymp. Sig.(2-sided)PSO 1.169 0.130DE 1.617 0.011
Urban GA 1.182 0.122ES 0.774 0.587SA 1.322 0.061PSO 1.403 0.039DE 1.265 0.082
Highway GA 1.113 0.168ES 1.186 0.120SA 1.525 0.019
Table 6.2: KS-test results for the five algorithms and two scenarios.
1SPSS (Statistical Package for the Social Sciences) - http://www.spss.com/
87

CHAPTER 6. RESULTS
A general comparison can be made using the Friedman [124] statistical testby means of which the algorithms are sorted in a ranked list. Table 6.3 shows theFriedman ranking of the compared algorithms in urban and highway instances. Inthis table, the best ranked algorithm is located in the top. For urban instance, PSOand DE are the best ranked algorithms, showing SA the last position. Nevertheless,for highway scenario, SA obtains the best rank, whereas PSO is located in the thirdposition.
Urban HighwayAlgorithm Rank Algorithm RankPSO 1.27 SA 1.83DE 1.83 GA 1.97GA 3.07 PSO 2.17ES 4.33 DE 3.67SA 4.50 ES 4.97
Table 6.3: Friedman Rank test with confidence level 95%
Theses statistical results lead us to think that, in spite of the global best be-havior of PSO, the different requirements implicit to both instances implies thateach algorithm can show quite different results depending on the VANET scenarioon which it operates. For example, DE shows a competitive performance in urbanscenario whereas it is the second worst in highway. The opposite example can beobserved in GA and SA which show weak results in urban but highly competitiveones in highway. Therefore, the VANET designer can select the optimization modelmore suited to his/her requirements, and choose the best option for each studiedVANET scenario.
6.2 Algorithms Performance Study
This section studies the performance of the five used algorithms solving OFTC prob-lem in both scenarios . In order to do so, we analyze the evolution of fitness valuefor the best solution during the whole evolution process. In addition, we discuss therequired execution times.
Figures 6.1 and 6.2 illustrate the graphics of the best fitness values obtainedthrough the median execution in urban and highway scenarios, respectively.
88

6.2. ALGORITHMS PERFORMANCE STUDY
Figure 6.1: Median fitness performance in urban scenario.
Figure 6.2: Median fitness performance in highway scenario.
Observing both graphs we can draw the following conclusions:
• PSO and DE tend to converge in the same range of solution evaluations.However they could improved their fitness even during the final generations ofthe evolution process.
89

CHAPTER 6. RESULTS
• For both scenarios. GA starts from good solutions but it is subjected to anearly stagnation.
• The lack of robustness of ES and SA in this specific application is remarkable,because they present different behavior depending on the VANET scenario(urban or highway).
Concerning to the execution times that each algorithm spent in the experimentscarried out in this work, Table 6.4 presents both, the mean time in which the bestsolution was found (Tbest) and the global mean run time (Trun). The detailed exe-cution time for each independent run of each algorithm are included in Appendices(see Section A.2).
Scenario Algorithm Tbest (seconds) Trun (seconds)
PSO 4.68E+03 7.95E+03DE 4.37E+03 7.12E+03
Urban GA 3.48E+03 6.68E+03ES 5.46E+03 9.00E+03SA 2.18E+03 4.76E+03PSO 1.39E+03 2.19E+03DE 9.82E+02 2.10E+03
Highway GA 8.83E+02 1.56E+03ES 9.84E+02 1.47E+03SA 5.85E+02 8.45E+02
Table 6.4: Mean execution time (seconds) per independent run of each algorithmfor both, urban and highway, scenarios.
SA has spent shortest times to find its best solution and to finish the execution.PSO and DE spent close execution times for the two VANET scenarios because theyperform similar internal operations. Finally, the two evolutionary algorithms (GAand ES) consume also closed times.
In short, the algorithms require a time between 4.76E+03 and 9.00E+03 seconds(80 and 150 minutes, respectively) to solve the problem in the urban scenario anda time between 8.45E+02 and 2.19E+03 seconds (23 and 60 minutes, respectively)to solve the same on highway instance. This is a relative high computational effort.However it is justifcable since the benefits of finding an optimal configuration forthe VDTP protocol are considerable and during the life of the network.
90

6.3. VANET QOS ANALYSIS
6.3 VANET QoS Analysis
After obtaining the parameter settings for VDTP protocol returned by the fivemetaheuristic algorithms, we have simulated them to test their performance ontransferring information in VANETs. In addition, we have compared the resultswith the configuration settings used by the experts of CARLINK [22] (chunk size:25,600 bytes, retransmission time: 8 seconds, and max. retransmissions per packet:8 attempts).
We have simulated file transfers in the VANET scenarios defined in Section 5.1.1.In these two scenarios (urban and highway) eleven 1 Mbyte (1,024 Kbytes) file trans-fers are performed among the vehicles.
Tables 6.5 and 6.6 show the optimal parameter settings for the VDTP protocolautomatically obtained by the proposed algorithms and the average values of themetrics used to analyze the QoS for both VANET scenarios. They also include theparameter setting that has been used by experts of CARLINK followed by the resultsof simulations (last row). The first three columns contain the different parametersettings of the VDTP protocol, in this order: the chunk size, the timeout, andthe maximum number of retransmissions of a request packet. The following threecolumns are the metrics obtained from the simulations in this order: the transmis-sion time, the total number of packets lost during transmission, and the amount ofdata downloaded correctly. The results are available in more detail in Section A.1of the Appendicces.
Algorithm VDTP configuration Simulation resultsChunk size Timeout Attempts Transmission time Lost packs. Transfer data
(Bytes) (seconds) (seconds) (Kbytes)PSO 41,358 10.00 3 3.41 0.27 1,024ES 23,433 10.00 8 3.50 0.27 1,024GA 31,196 3.83 9 3.61 0.27 1,024DE 28,278 6.00 9 3.59 0.63 1,024SA 19,756 6.43 3 4.22 0.36 1,024CARLINK 25,600 8.00 8 4.24 0.36 1,024
Table 6.5: Optimal configurations achieved in the median execution and the CAR-LINK experts one for VDTP protocol and simulation values in urban scenario.
91

CHAPTER 6. RESULTS
Algorithm VDTP configuration Simulation resultsChunk size Timeout Attempts Transmission time Lost packs. Transfer data
(Bytes) (seconds) (seconds) (Kbytes)
PSO 29,257 6.42 9 24.67 3.18 1,024DE 19,810 6.91 8 27.66 3.45 1,024GA 34,542 9.54 10 26.96 2.72 1,024ES 38,490 8.15 12 33.99 3.36 1,024SA 32,002 8.21 4 25.43 2.54 1,024CARLINK 25600 8.00 8 33.08 3.27 1,024
Table 6.6: Optimal configurations achieved in the median execution and the CAR-LINK experts one for VDTP protocol and simulation values in highway scenario.
For the urban VANET scenario, the VDTP configuration obtained by PSO(chunk size=41,358 bytes, retransmission time=10 secs, and max. attempts=3 )achieves the best performance in terms of transmission time (3.41 secs) and meannumber of lost packets (0.27). Specifically, in comparison with the human expertsparameter configuration of CARLINK, PSO reduces the transmission time in 0.83secs (19.5%) registering also a lower number of lost packets.
Something similar happens with the results obtained in the highway scenario, theconfiguration obtained by PSO (chunk size=29,257 bytes, retransmission time=6.42secs, and max. attempts=9 ) transfers the files faster than the others, regarding thehuman experts configuration from 33.08 to 24.67 secs (25%). We must notice that,in spite of achieving the PSO a higher reduction in the transmission time than SAand GA, the fact of losing more packets (3.18 in PSO, 2.71 in GA, and 2.54 in SA)in the global transference leads SA and GA to calculate a better fitness value.
a) Urban scenario b) Highway scenario
Figure 6.3: Effective transmission data rates (throughput) in Kbps achieved duringthe simulations of the final VDTP configurations in comparison with values givenby human expert configurations of CARLINK consortium.
92

6.3. VANET QOS ANALYSIS
According to figures 6.3.a and 6.3.b, the effective transmission data rate ob-tained by practically all algorithms in the two VANET scenarios are higher than theCARLINK experts configuration, except in the case of the parameter configurationreturned by ES in highway scenario.
Specifically, PSO achieves the highest effective data rate (2402.32 Kbps in urbanand 332 Kbps in highway scenarios). We again remind that the actual reductionof effective data rates among vehicles are in the order of hundreds of Kbps, so oursavings (470.32 Kbps in urban and 84.4 Kbps in highway) are truly meaningful incurrent real applications such as safety and traffic control. This clearly claims forthe utilization of these automatic algorithms to help human designers.
Notice the importance of the VANET scenario where there are the transfers ofinformation, because in highway the effective transmission data rates are 70% lowerthan in the urban areas. This is due mainly to the high speed at which vehiclesmove out of towns.
The following highlights the most important results presented in this chapter:
• Urban scenario:
– Best algorithm according Friedman test: PSO.
– Algorithm which obtains the best fitness value: DE.
– Algorithm which obtains the best mean fitness value: PSO.
– The most robust algorithm: ES.
– Fastest algorithm: SA.
– Percentage improvement of PSO against CARLINK experts: 19.6%.
– Mean percentage improvement of automatic computed configurations againstthe humans experts ones: 13.5%.
• Highway scenario:
– Best algorithm according Friedman test: SA.
– Algorithm which obtains the best fitness value: GA.
– Algorithm which obtains the best mean fitness value: PSO.
– The most robust algorithm: PSO.
93

CHAPTER 6. RESULTS
– Fastest algorithm: SA.
– Percentage improvement of PSO against CARLINK experts: 25.4%.
– Mean percentage improvement of automatic computed configurations againstthe humans experts ones: 6.1%.
94

Chapter 7
Conclusions and Future Work
This chapter describes the conclusions drawn from the study carried out in thisMaster Thesis and suggests some guidelines for the future work.
7.1 Conclusions
The deployment of vehicular networks is a field with about ten years of intense re-search activity and progress. Nowadays, the widely adopted approach is equippingvehicles with WLAN devices (IEEE 802.11 family). If vehicles can directly commu-nicate with each other and with roadside infrastructure, an entirely new paradigmfor traffic safety and transport efficiency can be created.
In such networks, vehicles communicate within a limited range. In turn, VANETsare composed with high mobility nodes. Thus, they exhibit a topology that maychange quickly and in unpredictable ways complicating the communication tasks.Therefore, it is crucial to provide user with an efficient configuration of the com-munication protocols in order to offer the best quality of service (QoS) possiblepreviously to its deployment.
In this Master Thesis we have optimized the VDTP protocol used in peer-to-peerinformation transfer in VANETs. In order to do this we have defined the optimiza-tion OFTC (Optimal File Transfer Protocol Configuration) problem, which lies insearching efficient parameters setting of VDTP protocol that maximizes the amountof data being transferred and minimizes the transmission time as the number of lostpackets.
95

CHAPTER 7. CONCLUSIONS AND FUTURE WORK
The proposed problem has been solved by employing five metaheuristic algo-rithms (SA, GA, ES, PSO, and DE) that use the VanetMobiSim/Ns-2 vehicularnetwork simulator to evaluate the solutions generated during the execution. Wehave developed the VDTP protocol in order to simulate it on ns-2. In addition,we have modified ns-2 simulator adding the functionality of interacting with thesemetaheuristic algorithms. In turn, we have defined two different scenarios on whichwe have solved the problem (urban and highway instances) based on two real areasof Málaga city. Finally, we have compared the performance of the obtained config-urations with the defined ones by human experts of CARLINK consortium.
In order to compare the algorithms with each other we have used a nonparamet-ric test, the Friedman test. The results reveal that PSO performs statistically betterthan the others in the urban scenario. Moreover, this algorithm obtains similar re-sults that the best algorithms (GA and SA) in the highway scenario. The geneticalgorithm also gets quite competitive results for both scenarios.
From the point of view of its real world utilization, PSO returned configurationcan reduce 19.6% of the transmission time in urban scenario and 25.43% in highwayareas with regards to human experts configuration, while transmitting the sameamount of data (1,024 Kbytes).
The highest effective data rates is obtained by using the same configuration(PSO), it is 2402,32 Kbps (300,39 Kbytes/s) and 332 Kbps (41,5 Kbytes/s) in ur-ban and highway scenarios, respectively. Besides, all the metaheuristic algorithmshave obtained higher bandwidth than that offered by CARLINK experts, except inone case (ES in highway instance.) Furthermore, all analyzed VDTP configurationshave transferred correctly 1,024 Kbyte files with a non-significant packet loss.
The execution time spent on solving the OFTC problem by the algorithms arebetween 80 and 150 minutes for the urban case and between 23 and 60 minutesin the highway. Although involving a large computational effort is acceptable fordesigners of VANETs.
The analysis of the results and the required computational effort lead us to advisethe final use of our automatic design algorithm for this kind of problems.
96

7.2. FUTURE WORK
7.2 Future Work
The research area of vehicular networks is in full swing because of the possible realapplications it offers that could change the lives of users of roadways. In turn, itfaces several challenges that are not easy to solve: the search for wireless technologythat best fits to this type of networks, the selection of network protocols and theirconfigurations to obtain the best performance possible, and the realistic simulationof vehicles and their communications, among others.
This Master Thesis work is the starting point of several research lines, the mostnotable ones are the following ones:
• The use of larger and more realistic VANET scenarios for evaluating in a morerealistic way the fitness function. Additionally, studying how the network sizesaffect the performance of these optimization techniques.
• Optimizing other protocols used in VANETs (such as DSR, UDP, ...) throughthe use of the strategy used in the Master Thesis, i.e., coupling metaheuristictechniques and a realistic VANET simulator.
• Applying on real-world tests the results obtained in this work using real carsmoving through roads, in order to compare the performance against the sim-ulation results.
• Defining these problems as dynamic optimization problems (on-line), since theproblems encountered in vehicular networks depend on the scenario and themoment they arise. In turn, these problems may be defined in a multi-objectiveway.
Besides the future challenges presented above, the field of vehicular networksopens up a large universe difficult to explore. However, the benefits of reaching thegoal motivate us to invest in this difficult adventure.
97

CHAPTER 7. CONCLUSIONS AND FUTURE WORK
98

Appendix A
Detailed Numerical Results
This appendix contains the results that have been obtained in the experiments car-ried out in this Master Thesis and that have been discussed in Chapter 6. Section A.1shows the results of simulations of the obtained configurations. Section A.2 presentsthe execution times used in the execution of the algorithms.
A.1 Simulation Results
After obtaining the optimal VDTP protocol configurations using metaheuristic tech-niques, we have simulated them to compare with each other and with the configu-ration of the CARLINK experts. This section provides tables containing the valuesreturned by the simulations. These simulations consist of file transfers in the sce-narios defined in Section 5.1.1.
The results of simulations in urban scenario are shown in Tables A.1, A.2, A.3,A.4, and A.5 containing the results of configurations obtained by the algorithmsPSO, DE, GA, ES, and SA, respectively. The results obtained in this same scenariousing the configuration used CARLINK experts [24] are shown in Table A.6.
The results of simulations in urban scenario are shown in Tables A.7, A.8, A.9,A.10, and A.11 containing the results of configurations obtained by the algorithmsPSO, DE, GA, ES, and SA, respectively. The results obtained in this same scenariousing the configuration used CARLINK experts [24] are shown in Table A.12.
99

APPENDIX A. DETAILED NUMERICAL RESULTS
The first column of the tables shows the number of the transfer, the second theamount of data that has been transferred successfully in Kbytes, the third presentsthe number of lost during the file transfer, and the fourth column shows the time inseconds used to complete the download file.
# Data (Kbytes) Lost packets Transmission time (secs.)1 1024 0 0.0863222 1024 0 0.0872393 1024 0 0.4308224 1024 0 0.6137295 1024 0 0.7701956 1024 0 0.8403137 1024 0 1.0952708 1024 0 1.2946389 1024 0 1.46034110 1024 1 10.48035411 1024 2 20.432997Media 1024 0.27 3.4174745
Table A.1: Results obtained by simulating in urban scenario the PSO configuration(chunk_size=41358, timeout=10.00000, max_attempts=3).
# Data (Kbytes) Lost packets Transmission time (secs.)1 1024 0 0.0602492 1024 0 0.0611663 1024 0 0.3373404 1024 0 0.6362885 1024 0 0.6465116 1024 0 0.6720177 1024 1 8.0536928 1024 1 8.1868749 1024 1 10.42933510 1024 2 16.05053311 1024 2 20.145769Media 1024 0.63 3.5902343
Table A.2: Results obtained by simulating in urban scenario the DE configuration(chunk_size=23433, timeout=8.00000, max_attempts=10).
100

A.1. SIMULATION RESULTS
# Data (Kbytes) Lost packets Transmission time (secs.)1 1024 0 0.0715412 1024 0 0.0724573 1024 0 0.4062854 1024 0 0.5398365 1024 0 0.6718916 1024 0 0.7568627 1024 0 0.9863038 1024 0 1.8404959 1024 0 2.93779110 1024 1 11.58906711 1024 2 20.966500Media 1024 0.27 3.6126389
Table A.3: Results obtained by simulating in urban scenario the GA configuration(chunk_size=31196, timeout=3.83673, max_attempts=9).
# Data (Kbytes) Lost packets Transmission time (secs.)1 1024 0 0.0672972 1024 0 0.0682133 1024 0 0.3372424 1024 0 0.3856655 1024 0 0.5879256 1024 0 0.9254397 1024 0 1.1105728 1024 0 1.1536639 1024 0 1.28812310 1024 1 10.43754211 1024 2 20.187830Media 1024 0.27 3.3226828
Table A.4: Results obtained by simulating in urban scenario the ES configuration(chunk_size=28278, timeout=6.00000, max_attempts=9).
101

APPENDIX A. DETAILED NUMERICAL RESULTS
# Data (Kbytes) Lost packets Transmission time (secs.)1 1024 0 0.0549012 1024 0 0.0558173 1024 0 0.2358254 1024 0 0.3877275 1024 0 0.6864446 1024 0 0.7492997 1024 0 0.8124458 1024 0 0.8752969 1024 0 2.25841210 1024 1 10.33558611 1024 3 20.354160Media 1024 0.36 3.345992
Table A.5: Results obtained by simulating in urban scenario the SA configuration(chunk_size=19756, timeout=6.43308, max_attempts=3).
# Data (Kbytes) Lost packets Transmission time (secs.)1 1024 0 0.0634012 1024 0 0.0643183 1024 0 0.4936384 1024 0 0.6089605 1024 0 0.7073586 1024 0 0.8653197 1024 0 1.0063318 1024 0 1.2636259 1024 1 10.06545510 1024 1 10.28863211 1024 2 20.184269Media 1024 0.36 4.1530173
Table A.6: Results obtained by simulating in urban scenario the CARLINK config-uration [24] (chunk_size=25600, timeout=8.0, max_attempts=8).
102

A.1. SIMULATION RESULTS
# Data (Kbytes) Lost packets Transmission time (secs.)1 1024 0 0.2404942 1024 1 10.3825873 1024 1 10.5920124 1024 1 13.4219395 1024 1 13.5258666 1024 4 30.3451427 1024 4 30.5166958 1024 4 30.8958539 1024 6 40.29560110 1024 6 40.63439611 1024 7 50.601421Media 1024 3.18 24.677455
Table A.7: Results obtained by simulating in highway scenario the PSO configura-tion (chunk_size=29257, timeout=6.42140, max_attempts=9).
# Data (Kbytes) Lost packets Transmission time (secs.)1 1024 0 0.1987302 1024 1 10.3595793 1024 1 10.4104324 1024 2 20.4215645 1024 4 30.2269886 1024 4 30.4868937 1024 4 30.6675268 1024 5 40.2068869 1024 5 40.22167210 1024 5 40.45100411 1024 7 50.646057Media 1024 3.45 27.663393
Table A.8: Results obtained by simulating in highway scenario the DE configuration(chunk_size=19810, timeout=6.91179, max_attempts=8).
103

APPENDIX A. DETAILED NUMERICAL RESULTS
# Data (Kbytes) Lost packets Transmission time (secs.)1 1024 0 0.2633762 1024 1 10.4016233 1024 2 20.2436604 1024 2 20.7123225 1024 3 30.4912386 1024 3 30.6568227 1024 3 31.0457698 1024 3 31.9127819 1024 4 40.30532510 1024 5 52.81705911 1024 10 105.048454Media 1024 3.36 33.990766
Table A.9: Results obtained by simulating in highway scenario the GA configuration(chunk_size=34542, timeout=9.54986, max_attempts=10).
# Data (Kbytes) Lost packets Transmission time (secs.)1 1024 0 0.2802432 1024 1 10.4469453 1024 1 10.5894174 1024 2 20.5816385 1024 3 30.3844366 1024 3 30.7312767 1024 3 30.7889398 1024 3 31.2994319 1024 4 40.27104210 1024 4 40.63774111 1024 6 50.598904Media 1024 2.72 26.964546
Table A.10: Results obtained by simulating in highway scenario the ES configuration(chunk_size=38490, timeout=8.15197, max_attempts=12).
104

A.1. SIMULATION RESULTS
# Data (Kbytes) Lost packets Transmission time (secs.)1 1024 0 0.2524922 1024 1 10.4599233 1024 1 10.4824134 1024 2 20.6732885 1024 3 30.3121956 1024 3 30.5586347 1024 3 31.3058058 1024 3 31.8571669 1024 3 32.39244110 1024 4 40.41333411 1024 4 41.068150Media 1024 2.54 25.434167
Table A.11: Results obtained by simulating in highway scenario the SA configuration(chunk_size=32002, timeout=8.21363, max_attempts=4).
# Data (Kbytes) Lost packets Transmission time (secs.)1 1024 0 0.1370032 1024 1 10.2465553 1024 1 10.2734524 1024 2 20.3686055 1024 2 20.5911466 1024 3 30.2787177 1024 3 30.3998628 1024 4 40.2840819 1024 4 40.70931210 1024 5 50.37268411 1024 8 110.244034Media 1024 3.27 33.082313
Table A.12: Results obtained by simulating in highway scenario the CARLINKconfiguration (chunk_size=25600, timeout=8.0, max_attempts=8).
105

APPENDIX A. DETAILED NUMERICAL RESULTS
A.2 Final Execution Times
In this Master Thesis the metaheuristic algorithms have the same number of fitnessfunction evaluations (1000). For this reason, we have used the execution time as ameasurement to evaluate the performance of these algorithms (see Section 6.2).
Tables A.13 and A.14 show the execution time required by each algorithm tosolve the OFTC problem for urban and highway scenarios, respectively. The firstcolumn shows the independent run which is measured. For each algorithm, the firstcolumn (Best sol.) indicates the time in seconds when the best solution was foundand the second column (Total) shows the total execution time taken to run theindependent run.
106

A.2. FINAL EXECUTION TIMES
PSO
DE
ES
ES
GA
#Bestsol.
Total
Bestsol.
Total
Bestsol.
Total
Bestsol.
Total
Bestsol.
Total
11.58
E+10
1.63
E+10
6.16
E+08
5.66
E+09
7.43
E+07
7.43
E+07
5.17
E+07
5.61
E+08
3.27
E+09
5.59
E+09
23.89
E+09
7.22
E+09
3.47
E+09
3.86
E+09
5.62
E+09
5.76
E+09
4.33
E+08
7.17
E+08
1.81
E+09
3.70
E+09
31.52
E+09
4.32
E+09
3.03
E+09
5.71
E+09
3.10
E+09
1.07
E+10
8.93
E+08
1.16
E+09
1.32
E+09
4.89
E+09
42.72
E+09
9.84
E+09
1.86
E+09
5.67
E+09
7.83
E+07
7.83
E+07
5.46
E+08
6.01
E+08
6.07
E+09
6.23
E+09
55.11
E+09
5.90
E+09
2.61
E+09
5.48
E+09
3.61
E+09
6.19
E+09
5.00
E+08
1.47
E+09
1.16
E+09
5.30
E+09
67.64
E+09
8.57
E+09
1.80
E+09
9.02
E+09
4.61
E+07
4.61
E+07
4.02
E+08
5.98
E+08
7.59
E+08
5.83
E+09
71.32
E+10
3.01
E+10
3.45
E+09
4.91
E+09
1.26
E+08
6.78
E+09
6.00
E+08
1.36
E+09
2.47
E+09
3.74
E+09
81.11
E+10
1.19
E+10
3.90
E+09
5.56
E+09
4.77
E+09
8.21
E+09
3.07
E+08
6.00
E+08
1.82
E+09
5.51
E+09
92.69
E+09
6.66
E+09
1.25
E+10
1.68
E+10
2.97
E+07
2.97
E+07
3.94
E+08
6.47
E+08
3.66
E+09
5.12
E+09
101.82
E+09
6.80
E+09
2.47
E+09
5.73
E+09
4.59
E+09
8.75
E+09
1.92
E+08
5.89
E+08
3.74
E+09
5.33
E+09
113.35
E+09
6.59
E+09
3.48
E+09
5.72
E+09
2.21
E+08
2.21
E+08
1.05
E+09
7.55
E+08
2.40
E+09
1.57
E+10
122.56
E+09
3.30
E+09
4.28
E+09
6.20
E+09
1.58
E+09
8.51
E+09
3.38
E+08
1.15
E+09
3.48
E+09
3.77
E+09
131.40
E+09
7.23
E+09
4.31
E+09
5.82
E+09
5.40
E+09
7.37
E+09
5.87
E+08
4.93
E+08
1.59
E+10
1.74
E+10
145.06
E+09
5.68
E+09
3.40
E+09
3.75
E+09
7.01
E+07
7.01
E+07
1.01
E+09
5.87
E+08
3.00
E+09
5.25
E+09
155.79
E+09
8.12
E+09
4.97
E+09
9.22
E+09
6.02
E+09
6.87
E+09
5.88
E+08
5.61
E+08
1.85
E+09
5.23
E+09
166.04
E+08
7.44
E+09
4.37
E+09
5.82
E+09
2.83
E+09
6.62
E+09
2.21
E+08
7.17
E+08
4.93
E+09
5.35
E+09
174.00
E+09
5.46
E+09
3.49
E+09
5.46
E+09
2.81
E+07
8.51
E+09
5.42
E+07
1.16
E+09
6.19
E+08
7.24
E+09
185.48
E+09
5.88
E+09
1.14
E+10
1.29
E+10
7.43
E+07
7.43
E+07
2.31
E+08
6.01
E+08
2.17
E+09
5.38
E+09
193.56
E+09
9.98
E+09
5.67
E+08
5.49
E+09
5.62
E+09
5.76
E+09
6.10
E+08
1.47
E+09
1.85
E+09
5.50
E+09
205.04
E+09
7.40
E+09
3.90
E+09
5.58
E+09
3.10
E+09
1.07
E+10
1.34
E+09
1.67
E+09
1.66
E+09
6.36
E+09
215.75
E+09
6.67
E+09
9.47
E+09
1.57
E+10
7.83
E+07
7.83
E+07
1.46
E+09
1.68
E+09
3.18
E+09
5.80
E+09
221.08
E+09
5.31
E+09
5.35
E+09
6.14
E+09
3.61
E+09
6.19
E+09
5.30
E+08
1.88
E+09
2.26
E+09
5.38
E+09
235.02
E+09
5.45
E+09
1.76
E+09
6.34
E+09
4.61
E+07
4.61
E+07
2.72
E+08
5.63
E+08
5.43
E+08
5.46
E+09
245.74
E+09
5.84
E+09
3.48
E+09
5.28
E+09
1.26
E+08
6.78
E+09
6.56
E+08
5.35
E+08
7.29
E+09
7.29
E+09
253.98
E+09
6.30
E+09
5.37
E+09
5.61
E+09
4.77
E+09
8.21
E+09
8.93
E+08
6.56
E+08
2.06
E+09
5.88
E+09
261.46
E+09
5.41
E+09
3.83
E+09
5.50
E+09
2.97
E+07
2.97
E+07
5.46
E+08
5.61
E+08
4.47
E+09
6.01
E+09
272.84
E+09
7.89
E+09
1.94
E+10
1.94
E+10
4.59
E+09
8.75
E+09
5.00
E+08
7.17
E+08
2.04
E+08
4.85
E+09
282.30
E+09
8.60
E+09
1.71
E+09
5.43
E+09
2.21
E+08
2.21
E+08
4.02
E+08
1.16
E+09
9.24
E+09
1.37
E+10
296.16
E+09
6.16
E+09
1.65
E+09
5.79
E+09
1.58
E+09
8.51
E+09
6.00
E+08
6.01
E+08
9.24
E+09
1.95
E+10
302.62
E+09
7.83
E+09
1.25
E+09
5.84
E+09
7.01
E+07
7.01
E+07
3.94
E+08
5.98
E+08
3.76
E+09
4.69
E+09
Table A.13: Execution time in seconds for the algorithms to find the best solution(Best sol.) and to finish the whole process (Total) solving the OFTC problem in theurban scenario. Each row indicates an independent run of 30 (#).
107

APPENDIX A. DETAILED NUMERICAL RESULTSPSO
DE
ES
ES
GA
#Bestsol.
Total
Bestsol.
Total
Bestsol.
Total
Bestsol.
Total
Bestsol.
Total
11.86
E+09
2.11
E+09
3.11
E+09
3.33
E+09
2.27
E+09
2.63
E+09
5.72
E+07
9.58
E+07
6.95
E+08
1.20
E+09
28.94
E+08
1.32
E+09
9.23
E+08
1.89
E+09
6.58
E+08
6.58
E+08
9.41
E+07
9.18
E+07
9.47
E+08
1.24
E+09
35.73
E+08
1.50
E+09
2.94
E+08
1.36
E+09
1.77
E+07
1.77
E+07
9.34
E+07
1.24
E+08
8.37
E+08
1.47
E+09
41.50
E+09
2.87
E+09
1.94
E+08
3.19
E+09
1.35
E+07
1.35
E+07
2.52
E+08
1.20
E+08
1.33
E+09
1.45
E+09
51.16
E+09
1.71
E+09
4.69
E+08
1.29
E+09
4.02
E+08
4.02
E+08
9.77
E+07
2.85
E+08
2.78
E+08
1.16
E+09
68.68
E+08
1.49
E+09
1.15
E+09
1.88
E+09
1.91
E+08
1.91
E+08
1.35
E+08
1.26
E+08
1.55
E+08
5.06
E+08
71.28
E+09
2.05
E+09
7.13
E+08
7.73
E+08
8.91
E+08
8.91
E+08
1.61
E+08
1.98
E+08
2.51
E+08
1.42
E+09
82.93
E+09
3.96
E+09
2.55
E+09
2.63
E+09
7.32
E+08
1.00
E+09
7.00
E+07
1.66
E+08
7.24
E+08
1.23
E+09
92.72
E+09
3.39
E+09
1.07
E+09
1.46
E+09
1.12
E+09
1.40
E+09
1.20
E+08
9.48
E+07
2.44
E+08
1.33
E+09
101.57
E+09
3.39
E+09
1.14
E+09
3.70
E+09
7.32
E+07
7.32
E+07
6.93
E+07
1.63
E+08
1.67
E+09
2.42
E+09
111.64
E+09
1.98
E+09
8.34
E+08
4.44
E+09
4.60
E+08
4.60
E+08
1.88
E+06
1.78
E+08
1.01
E+09
1.17
E+09
123.90
E+09
3.96
E+09
3.95
E+08
3.16
E+09
7.68
E+08
1.45
E+09
1.45
E+07
1.40
E+08
1.06
E+09
2.91
E+09
136.70
E+08
1.51
E+09
2.84
E+07
3.79
E+08
4.71
E+08
1.42
E+09
7.01
E+07
3.09
E+07
1.06
E+09
1.58
E+09
141.19
E+09
2.89
E+09
8.51
E+07
1.05
E+09
4.47
E+08
4.47
E+08
6.66
E+07
1.28
E+08
9.66
E+08
1.21
E+09
159.31
E+08
1.17
E+09
3.13
E+08
7.82
E+08
1.18
E+09
1.20
E+09
9.30
E+07
1.60
E+08
1.18
E+08
1.18
E+09
162.32
E+09
2.53
E+09
1.10
E+09
1.65
E+09
1.29
E+08
1.29
E+08
1.29
E+08
1.13
E+08
2.61
E+07
1.79
E+09
171.97
E+09
2.33
E+09
2.69
E+08
1.82
E+09
6.20
E+08
1.41
E+09
6.17
E+07
1.51
E+08
1.15
E+09
1.29
E+09
181.81
E+08
1.91
E+09
6.57
E+08
8.47
E+08
2.18
E+07
6.49
E+08
7.11
E+07
1.14
E+08
5.51
E+08
1.25
E+09
191.43
E+09
1.45
E+09
1.98
E+09
2.86
E+09
2.85
E+08
1.41
E+09
1.63
E+08
1.45
E+08
9.21
E+08
1.24
E+09
204.97
E+08
2.00
E+09
1.25
E+09
2.83
E+09
1.24
E+09
1.50
E+09
1.52
E+08
1.51
E+08
1.17
E+09
1.30
E+09
213.31
E+09
4.16
E+09
1.32
E+09
1.92
E+09
1.14
E+08
1.14
E+08
7.81
E+07
2.40
E+08
3.44
E+09
3.69
E+09
225.15
E+08
1.62
E+09
3.20
E+07
1.33
E+09
6.34
E+07
6.34
E+07
8.08
E+07
2.13
E+08
3.59
E+09
4.01
E+09
239.69
E+08
1.19
E+09
1.12
E+09
1.97
E+09
1.16
E+08
1.16
E+08
1.04
E+08
1.64
E+08
8.13
E+08
1.35
E+09
248.74
E+08
1.31
E+09
1.01
E+09
1.50
E+09
6.92
E+08
1.49
E+09
9.76
E+07
1.13
E+08
3.30
E+08
1.58
E+09
251.79
E+08
7.18
E+08
9.95
E+08
2.02
E+09
7.09
E+08
7.09
E+08
1.64
E+08
1.30
E+08
2.31
E+08
1.29
E+09
266.73
E+08
1.57
E+09
2.93
E+08
2.30
E+09
8.75
E+08
1.24
E+09
1.21
E+08
8.92
E+07
6.84
E+08
1.30
E+09
271.13
E+09
2.40
E+09
4.26
E+08
1.21
E+09
1.15
E+09
1.71
E+09
5.38
E+07
6.59
E+07
3.18
E+08
1.28
E+09
281.29
E+09
1.71
E+09
1.01
E+09
1.08
E+09
1.12
E+09
1.40
E+09
8.41
E+07
1.90
E+08
3.18
E+08
1.33
E+09
291.43
E+09
2.12
E+09
1.30
E+07
1.94
E+09
7.32
E+07
7.32
E+07
1.31
E+08
2.11
E+08
1.25
E+09
1.48
E+09
303.85
E+08
2.85
E+09
4.81
E+09
7.28
E+09
4.60
E+08
4.60
E+08
3.61
E+07
2.17
E+08
6.21
E+08
1.31
E+09
Table A.14: Execution time in seconds for the algorithms to find the best solution(Best sol.) and to finish the whole process (Total) solving the OFTC problem in thehighway scenario. Each row indicates an independent run of 30 (#).
108

Bibliography
[1] Comparing inertia weights and constriction factors in particle swarm opti-mization, volume 1, 2000.
[2] Hussein A. Abbass. An evolutionary artificial neural networks approach forbreast cancer diagnosis. Artificial Intelligence in Medicine, 25:265–281, 2002.
[3] Mobile Ad, Charles E. Perkins, and Elizabeth M. Royer. Multicast Ad hocOn-Demand Distance Vector (MAODV) Routing, 2000.
[4] E. Alba, F. Almeida, M. Blesa, C. Cotta, M. Díaz, I. Dorta, J. Gabarró,J. González, C. León, L. Moreno, J. Petit, J. Roda, A. Rojas, and F. Xhafa.Mallba: A library of skeletons for combinatorial optimisation. In B. Monienand R. Feldman, editors, Euro-Par 2002 Parallel Processing, volume 2400 ofLecture Notes in Computer Science, pages 927–932. Springer-VerlaG, BerlinHeidelberg, 2002.
[5] E. Alba, B. Dorronsoro, F. Luna, A. J. Nebro, P. Bouvry, and L. Hogie. Acellular multi-objective genetic algorithm for optimal broadcasting strategy inmetropolitan MANETs. Computer Communications, 30(4):685 – 697, 2007.
[6] E. Alba, B. Dorronsoro, F. Luna, A. J. Nebro, P. Bouvry, and L. Hogie. Acellular multi-objective genetic algorithm for optimal broadcasting strategy inmetropolitan manets. Comput. Commun., 30(4):685–697, 2007.
[7] Enrique Alba and J. Francisco Chicano. Software project management withgas. Information Services, 177:2380–2401, dec 2007.
[8] Enrique Alba, Sebastian Luna, and Jamal Toutouh. Accuracy and Efficiencyin Simulating VANETs . In Modelling, Computation and Optimization inInformation Systems and Management Sciences, pages 568–578, London, UK,2008. Physica Verlag, Springer-Verlag.
109

BIBLIOGRAFY
[9] Hedi Ayed, Djamel Khadraoui, Zineb Habbas, Pascal Bouvry, andJean François Merche. Transfer graph approach for multimodal transportproblems. In MCO, pages 538–547, 2008.
[10] B. V. Babu and Rakesh Angira. Optimization of industrial processes usingimproved and modified differential evolution. In Bhanu Prasad, editor, SoftComputing Applications in Industry, volume 226 of Studies in Fuzziness andSoft Computing, pages 1–22. Springer, 2008.
[11] T. Bäck, D. Fogel, and Z. Michalewicz. Handbook of evolutionary computation.Oxford Univ. Press, 1997.
[12] James E. Baker. Reducing bias and inefficiency in the selection algorithm.In Proceedings of the Second International Conference on Genetic Algorithmson Genetic algorithms and their application, pages 14–21, Hillsdale, NJ, USA,1987. L. Erlbaum Associates Inc.
[13] Antonio Berlanga, Pedro Isasi, Araceli Sanchis, and José M. Molina. Neu-ral networks robot controller trained with evolutionary strategies. In 1999Congress on Evolutionary Computation, pages 413–419, Piscataway, NJ, 1999.IEEE Service Center.
[14] Specification of the bluetooth system, volume 1: Core, v1.1. Bluetooth SIG,February 2001.
[15] C. Blum and A. Roli. Metaheuristics in combinatorial optimization: Overviewand conceptual comparison. ACM Comput. Surv., 35(3):268–308, 2003.
[16] Allan Bricker, Michael Litzkow, and Miron Livny. Condor Technical Summary.Technical report, Computer Sciences Department, University of Wisconsin -Madison, May 1992.
[17] Franco Busetti. Simulated annealing overview, 2003.
[18] Giorgio Calandriello, Panos Papadimitratos, Jean-Pierre Hubaux, and Anto-nio Lioy. Efficient and robust pseudonymous authentication in VANET. InVANET ’07: Proceedings of the fourth ACM international workshop on Ve-hicular ad hoc networks, pages 19–28, New York, NY, USA, 2007. ACM.
[19] Tracy Camp and Yu Liu. An adaptive mesh-based protocol for geocast routing.J. Parallel Distrib. Comput., 63(2):196–213, 2003.
110

BIBLIOGRAFY
[20] Erick Cantú-Paz, Martin Pelikan, Martin Pelikan, David E. Goldberg, andDavid E. Goldberg. Boa: The bayesian optimization algorithm. In In, pages525–532. Morgan Kaufmann, 1999.
[21] CANU. Mobility Simulation Environment (CanuMobiSim). http://canu.
informatik.uni-stuttgart.de/mobisim.
[22] CARLINK. Carlink consortium. http://carlink.lcc.uma.es/, 2006.
[23] CARLINK::UMA. VDTP: A File Transfer Protocol for Vehicular Ad hocNetworks. Technical report, Universidad de Málaga, 2006.
[24] CARLINK::UMA. Simulation and evaluation of the CARLINK-UMA sce-nario by using VanetMobiSim/Ns-2. Technical Report D1.3.3, Departamentode Lenguajes y Ciencias de la Computación, University of Málaga, E.T.S.I.Informática, Campus de Teatinos, November 2007.
[25] CARLINK::UMA. MEUs ad-hoc communications performance evaluation inhighway scenarios (DYNAMIC tests in the CARLINK-UMA scenario). Techni-cal Report D2.2.5, Departamento de Lenguajes y Ciencias de la Computación,University of Málaga, E.T.S.I. Informática, Campus de Teatinos, 2008.
[26] CARLINK::UMA. MEUs ad-hoc communications performance evaluation inurban scenarios (DYNAMIC tests in the CARLINK-UMA scenario). TechnicalReport D2.2.4, Departamento de Lenguajes y Ciencias de la Computación,University of Málaga, E.T.S.I. Informática, Campus de Teatinos, 2008.
[27] CARLINK::UMA. Simulation and evaluation of realistic MEU ad-hoc com-munications in CARLINK scenarios by using VanetMobiSim/Ns-2. TechnicalReport D1.3.9, Departamento de Lenguajes y Ciencias de la Computación,University of Málaga, E.T.S.I. Informática, Campus de Teatinos, March 2008.
[28] CARLINK::UMA. Simulation and evaluation of the CARLINK-UMA multi-hop scenario by using VanetMobiSim/Ns-2. Technical Report D1.3.6, Depar-tamento de Lenguajes y Ciencias de la Computación, University of Málaga,E.T.S.I. Informática, Campus de Teatinos, March 2008.
[29] CARLINK::UMA. Simulation and evaluation of the TSCU communications inCARLINK scenarios by using VanetMobiSimNs-2. Technical Report D1.3.8,Departamento de Lenguajes y Ciencias de la Computación, University ofMálaga, E.T.S.I. Informática, Campus de Teatinos, March 2008.
111

BIBLIOGRAFY
[30] Han-Chieh Chao and Sherali Zeadally. Mobility protocols for its/vanet. Com-puter Communications, 31(12):2765 – 2766, 2008. Mobility Protocols for IT-S/VANET.
[31] Yawgeng A. Chau and Yao-Hua Chen. Speed-based adaptive medium accesscontrol with csma/ca and reserved time slots. In SUTC ’06: Proceedingsof the IEEE International Conference on Sensor Networks, Ubiquitous, andTrustworthy Computing - Vol 2 - Workshops, pages 208–213, Washington, DC,USA, 2006. IEEE Computer Society.
[32] P. L. Chebyshev. Théorie des mécanismes connus sous le nom de parallélo-grammes. Mémoires des Savants étrangers présentés a l’ Académie de Saint-Pétersbourg, 7:539–586, 1854.
[33] Frank Chiang, Zenon Chaczko, Johnson I. Agbinya, and Robin Braun. Ant-based topology convergence algorithms for resource management in vanets. InRoberto Moreno-Díaz, Franz Pichler, and Alexis Quesada-Arencibia, editors,EUROCAST, volume 4739 of Lecture Notes in Computer Science, pages 992–1000. Springer, 2007.
[34] Kwan-Wu Chin and Darryn Lowe. The IEEE 802.15.3 MAC: Enabling high-rate multimedia applications in wireless personal area network, June 2006.
[35] N. Christofides, A. Mingozzi, P. Toth, and C. Sandi, editors. CombinatorialOptimization. Wiley, 1979.
[36] David T. Connolly. An improved annealing scheme for the QAP. EuropeanJournal of Operational Research, 46(1):93–100, May 1990.
[37] K. Deb. Multi-Objective Optimization using Evolutionary Algorithms. Wiley-Interscience Series in Systems and Optimization. John Wiley & Sons, Chich-ester, 2001.
[38] Dante DeLucia and Katia Obraczka. Congestion control performance of areliable multicast protocol. In ICNP, pages 168–176, 1998.
[39] M. Dorigo. Optimization, Learning and Natural Algorithms. PhD thesis, DEI,Politecnico di Milano, 1992.
[40] B. Dorronsoro, G. Danoy, P. Bouvry, and E. Alba. Evaluation of different op-timization techniques in the design of ad hoc injection networks. In Workshop
112

BIBLIOGRAFY
on Optimization Issues in Grid and Parallel Computing Environments, part ofthe High Performance Computing and Simulation Conference (HPCS), pages1290–296, 2008.
[41] Jakob Eriksson, Hari Balakrishnan, and Samuel Madden. Cabernet: VehicularContent Delivery Using WiFi. In 14th ACM MOBICOM, San Francisco, CA,September 2008.
[42] Xiao feng Xie, Wen-Jun Zhang, and Zhi-Lian Yang. Solving numerical opti-mization problems by simulating particle-wave duality and social informationsharing. In Social Information Sharing – Intern. Conf. of Artificial Intelli-gence, Las Vegas, pages 1163–1169, 2002.
[43] L. J. Fogel, A. J. Owens, and M. J. Walsh. Artificial Intelligence throughSimulated Evolution. John Wiley, New York, USA, 1966.
[44] Foroohar Foroozan and Kemal Tepe. A high performance cluster-based broad-casting algorithm for wireless ad hoc networks based on a novel gateway selec-tion approach. In PE-WASUN ’05: Proceedings of the 2nd ACM internationalworkshop on Performance evaluation of wireless ad hoc, sensor, and ubiquitousnetworks, pages 65–70, New York, NY, USA, 2005. ACM.
[45] S. Garcia, D. Molina, M. Lozano, and F. Herrera. Un estudio experimentalsobre el uso de test no paramétricos para analizar el comportamiento de losalgoritmos evolutivos en problemas de optimización. In In Proceedings Con-greso Español sobre Metaheurísticas, Algoritmos Evolutivos y Bioinspirados(MAEB07), February 2007.
[46] A. Ghosh, D.R. Wolter, J.G. Andrews, and R. Chen. Broadband wirelessaccess with wimax/802.16: current performance benchmarks and future po-tential. Communications Magazine, IEEE, 43(2):129–136, Feb. 2005.
[47] F. Glover and G. Kochenberger, editors. Handbook of Metaheuristics, volume114 of International Series in Operations Research & Management Science.Springer, 2003.
[48] Fred Glover. Heuristics for integer programming using surrogate constraints.Decision Sciences, 8:156–166, 1977.
[49] Fred Glover. Future paths for integer programming and links to artificialintelligence. Computers & Operation Research, 13(5):533–549, 1986.
113

BIBLIOGRAFY
[50] Fred Glover. Tabu Search - Part I. ORSA Journal on Computing, 1(3):190–206, 1989.
[51] Fred Glover. Scatter search and path relinking, pages 297–316. McGraw-Hill,Maidenhead, UK, England, 1999.
[52] David E. Goldberg. Genetic Algorithms in Search, Optimization, and MachineLearning. Addison-Wesley Professional, January 1989.
[53] Víctor González, Alberto Los Santos, Carolina Pinart, and Francisco Milagro.Experimental demonstration of the viability of ieee 802.11b based inter-vehiclecommunications. In TridentCom ’08: Proceedings of the 4th InternationalConference on Testbeds and research infrastructures for the development ofnetworks & communities, pages 1–7, ICST, Brussels, Belgium, Belgium, 2008.ICST (Institute for Computer Sciences, Social-Informatics and Telecommuni-cations Engineering).
[54] Daniel Gorgen, Hannes Frey, and Christian Hiedels. JANE-The Java Ad HocNetwork Development Environment. In ANSS ’07: Proceedings of the 40thAnnual Simulation Symposium, pages 163–176, Washington, DC, USA, 2007.IEEE Computer Society.
[55] Zygmunt J. Haas, Marc R. Pearlman, and Prince Samar. The zone routingprotocol (ZRP) for ad hoc networks. Internet-draft, IETF MANET WorkingGroup, July 2002. Expiration: January, 2003.
[56] J. Harri and C. Bonnet. A lower bound for vehicles’ trajectory duration.volume 4, pages 2273–2277, Sept., 2005.
[57] J. Härri, F. Filali, C. Bonnet, and Marco Fiore. Vanetmobisim: GeneratingRealistic Mobility Patterns for VANETs. In VANET: ’06: Proceedings of the3rd international workshop on Vehicular ad-hoc networks, pages 96–97. ACMPress, 2006.
[58] Hannes Hartenstein and Kenneth P. Laberteaux. A tutorial survey on ve-hicular ad hoc networks. Communications Magazine, IEEE, 46(6):164–171,2008.
[59] J. H. Holland. Adaptation in Natural and Artificial Systems. University ofMichigan Press, Ann Arbor, MI, USA, 1975.
114

BIBLIOGRAFY
[60] John H Holland. Adaptation in natural and artificial systems : an introduc-tory analysis with applications to biology, control, and artificial intelligence.University of Michigan Press, Ann Arbor, 1975.
[61] Chenn-Jung Huang, Yi-Ta Chuang, Dian-Xiu Yang, I-Fan Chen, You-JiaChen, and Kai-Wen Hu. A mobility-aware link enhancement mechanism forvehicular ad hoc networks. EURASIP J. Wirel. Commun. Netw., 2008:1–10,2008.
[62] Martin Hulin. Evolution strategies for circuit partitioning. In Branko Souček,editor, Dynamic, Genetic, and Chaotic Programming, pages 413–436. JohnWiley, New York, 1992.
[63] IEEE. Institute of Electrical and Electronics Engineers - Emerging TechnologyPortal. http://www.ieee.org/portal/site/emergingtech.
[64] A L. Ingber. Adaptive simulated annealing and lester ingber. Control andCybernetics, 25:33–54, 1996.
[65] Atsushi Iwata, Ching-Chuan Chiang, Guangyu Pei, Mario Gerla, and Tsu-WeiChen. Scalable routing strategies for ad hoc wireless networks. IEEE Journalon Selected Areas in Communications, 17(8):1369–1379, August 1999.
[66] Philippe Jacquet, Paul Mühlethaler, Thomas Clausen, Anis Laouiti, AmirQayyum, and Laurent Viennot. Optimized link state routing protocol. InIEEE INMIC’01, 28-30 December 2001, Lahore, Pakistan, pages 62–68. IEEE,IEEE, December 2001.
[67] Jaroslaw Malek. Trace graph - Network simulator ns-2 trace files analyser.http://www.tracegraph.com/.
[68] Jaehoon Jeong, Shuo Guo, Yu Gu, Tian He, and David Du. TBD:Trajectory-Based Data Forwarding for Light-Traffic Vehicular Networks. InProc. of the 29th International Conference on Distributed Computing Systems(ICDCS’09), 2009.
[69] David B. Johnson and David A. Maltz. Dynamic source routing in ad hocwireless networks. In Thomasz Imielinski and Hank Korth, editors, MobileComputing, volume 353, chapter 5, pages 153–181. Kluwer Academic Publish-ers, 1996.
115

BIBLIOGRAFY
[70] J. Kennedy and R. Eberhart. Particle Swarm Optimization. volume 4, pages1942–1948 vol.4, 1995.
[71] James Kennedy. The particle swarm: Social adaptation of knowledge. IEEEInternational Conference on Evolutionary Computation, pages 303–308, 1997.
[72] James Kennedy, Russell C. Eberhart, and Yuhui Shi. Swarm Intelligence. SanFrancisco, EUA : Morgan Kaufmann, 2001.
[73] S. Kirkpatrick, C. D. Gelatt, Jr., and M. P. Vecchi. Optimization by SimulatedAnnealing. Science, 220:671–680, 1983.
[74] Young-Bae Ko and N. H. Vaidya. GeoTORA: a protocol for geocasting inmobile ad hoc networks. In ICNP ’00: Proceedings of the 2000 InternationalConference on Network Protocols, page 240, Washington, DC, USA, 2000.IEEE Computer Society.
[75] Young-Bae Ko and Nitin H. Vaidya. Location-Aided Routing (LAR) in MobileAd Hoc Networks. In Mobile Computing and Networking, MOBICOM’98,October 25-30, 1998, Dallas, Texas, USA, pages 66–75. ACM / IEEE, October1998.
[76] Young-Bae Ko and Nitin H. Vaidya. Location-Based Multicast in Mobile AdHoc Networks. Technical report, College Station, TX, USA, 1998.
[77] K. Komathy and P. Arayanasamy. Trust-based evolutionary game model as-sisting AODV routing against selfishness. J. Netw. Comput. Appl., 31(4):446–471, 2008.
[78] Houda Labiod, Afifi Hossam, and Costantino De Santis. Wi-Fi, Bluetooth,Zigbee and WiMax. Springer-Verlag New York, Inc., Secaucus, NJ, USA, 2007.
[79] Manuel Laguna and Rafael Martí. Scatter search : methodology and imple-mentations in C. Kluwer Acad. Publ., 2003.
[80] Jason Lebrun, Chen nee Chuah, Dipak Ghosal, and Michael Zhang.Knowledge-based opportunistic forwarding in vehicular wireless ad hoc net-works. In In IEEE Vehicular Tech. Conf, pages 2289–2293, 2005.
[81] Jong Min Lee, Myoung Ju Yu, Young Hun Yoo, and Seong Gon Choi. A newscheme of global mobility management for inter-vanets handover of vehicles inv2v/v2i network environments. In NCM ’08: Proceedings of the 2008 Fourth
116

BIBLIOGRAFY
International Conference on Networked Computing and Advanced InformationManagement, pages 114–119, Washington, DC, USA, 2008. IEEE ComputerSociety.
[82] Xu Li. Genetic Algorithm Simulated Annealing Based Clustering Strategy inMANET. In Lipo Wang, Ke Chen, and Yew-Soon Ong, editors, ICNC (1),volume 3610 of Lecture Notes in Computer Science, pages 1121–1131. Springer,2005.
[83] Tao Lin, S. F. Midkiff, and J. S. Park. Minimal connected dominating setalgorithms and application for a manet routing protocol. In Performance,Computing, and Communications Conference, 2003. Conference Proceedingsof the 2003 IEEE International, pages 157–164, 2003.
[84] Lianggui Liu and Guangzeng Feng. Simulated annealing based multi-constrained qos routing in mobile ad hoc networks. Wirel. Pers. Commun.,41(3):393–405, 2007.
[85] Christian Lochert, Björn Scheuermann, Christian Wewetzer, Andreas Lue-bke, and Martin Mauve. Data aggregation and roadside unit placement for aVANET traffic information system. In VANET ’08: Proceedings of the fifthACM international workshop on VehiculAr Inter-NETworking, pages 58–65,New York, NY, USA, 2008. ACM.
[86] Francisco Luna. Metaheurísticas avanzadas para problemas reales en redes detelecomunicaciones. PhD thesis, University of Málaga, April 2008.
[87] F. J. Martinez, J. C. Cano, C. T. Calafate, and P. Manzoni. Citymob: A mo-bility model pattern generator for VANETs. In Communications Workshops,2008. ICC Workshops ’08. IEEE International Conference on, pages 370–374,2008.
[88] Kinji Matsumura, Kazuya Usui, Kenjiro Kai, and Koichi Ishikawa. Location-aware data broadcasting: an application for digital mobile broadcasting injapan. In MULTIMEDIA ’03: Proceedings of the eleventh ACM internationalconference on Multimedia, pages 271–274, New York, NY, USA, 2003. ACM.
[89] N. Metropolis, A. W. Rosenbluth, M. A. Rosenbluth, A. H. Teller, andE. Teller. Equation of state calculations by fast computing machines. J.Chem. Phys., 21:1087–1092, June 1953.
117

BIBLIOGRAFY
[90] Jack Meyer and Robert H. Rasche. Kolmogorov-smirnov tests for distributionfunction similarity with applications to portfolios of common stock. NBERTechnical Working Papers 0076, National Bureau of Economic Research, Inc,March 1989.
[91] Sudip Misra, Isaac Woungang, and Subhas Chandra Misra. Guide to WirelessAd Hoc Networks. Springer Publishing Company, Incorporated, 2009.
[92] N. Mladenovic and P. Hansen. Variable Neighborhood Search. Comps. inOpns. Res., 24:1097–1100, 1997.
[93] Zhaomin Mo, Hao Zhu, Kia Makki, and N. Pissinou. MURU: A Multi-HopRouting Protocol for Urban Vehicular Ad Hoc Networks. pages 1–8, July 2006.
[94] Heinz Mühlenbein. The equation for response to selection and its use forprediction. Evol. Comput., 5(3):303–346, 1997.
[95] P. Larra naga, R. Etxeberria, J. A. Lozano, and J.M. Pe na. Optimization bylearning and simulation of bayesian and gaussian networks, 1999.
[96] NAM. Nam: Network Animator. http://www.isi.edu/nsnam/nam/.
[97] P. Nicopolitidis, A. S. Pomportsis, G. I. Papadimitriou, and M. S. Obaidat.Wireless Networks. John Wiley & Sons, Inc., New York, NY, USA, 2003.
[98] Ns-2. The Network Simulator - ns-2. http://www.isi.edu/nsnam/ns/, 2006.
[99] Ns-3. The ns-3 network simulator. http://www.nsnam.org/, 2010.
[100] S. Ohmori, Y. Yamao, and N. Akajima. The future generations of mobilecommunications based on broadband access technologies. CommunicationsMagazine, IEEE, 38(12):134–142, 2000.
[101] Frank Ohrtman. Wimax Handbook: Building 802.16 Wireless Networks.Mcgraw-Hill Professional, New York, NY, USA, May 2005.
[102] Stephan Olariu and Albert Y. Zomaya. Handbook Of Bioinspired AlgorithmsAnd Applications (Chapman & Hall/Crc Computer & Information Science).Chapman & Hall/CRC, 2005.
[103] OMNet. OMNet Community Site. http://www.omnetpp.org/, 2010.
118

BIBLIOGRAFY
[104] Mahamed G. Omran, Andries Petrus Engelbrecht, and Ayed A. Salman. Par-ticle swarm optimization for pattern recognition and image processing. InSwarm Intelligence in Data Mining, pages 125–151. 2006.
[105] OPNET. OPNET Technologies Inc. http://www.opnet.com/, 2010.
[106] Ibrahim H. Osman and Gilbert Laporte. Metaheuristics: A bibliography.Annals of Operations Research, 63(5):511–623, October 1996.
[107] Vincent D. Park and M. Scott Corson. A highly adaptive distributed routingalgorithm for mobile wireless networks. In IEEE Conference on ComputerCommunications, INFOCOM’97, April 7-11, 1997, Kobe, Japan, volume 3,pages 1405–1413. IEEE, IEEE, April 1997.
[108] Raffaele Penazzi, Piergiorgio Capozio, Martin Duncan, Angelo Scuderi, MaxSiti, and Edoardo Merli. Cooperative safety: a combination of multiple tech-nologies. In DATE ’08: Proceedings of the conference on Design, automationand test in Europe, pages 959–961, New York, NY, USA, 2008. ACM.
[109] C. Perkins. IP Mobility Support for IPv4. RFC 3344 (Proposed Standard),August 2002. Updated by RFC 4721.
[110] Charles E. Perkins and Pravin Bhagwat. Highly Dynamic Destination-Sequenced Distance-Vector Routing (DSDV) for Mobile Computers. In ACMConference on Communications Architectures, Protocols and Applications,SIGCOMM ’94, London, UK, pages 234–244. ACM, ACM, August 1994.
[111] Charles E. Perkins and Elizabeth M. Royer. Ad-hoc On-Demand DistanceVector Routing. In 2nd IEEE Workshop on Mobile Computing Systems andApplications, WMCSA ’99, February 25-26, 1999, New Orleans, Lousiana,USA, pages 90–100. IEEE, IEEE, February 1999.
[112] Thomas Plagemann, Ellen Munthe-Kaas, Katrine Stemland Skjelsvik, MatijaPuzar, Vera Goebel, Ulrik Johansen, Joe Gorman, and Santiago Pérez Marín.A data sharing facility for mobile ad-hoc emergency and rescue applications.In ICDCS Workshops, page 85, 2007.
[113] Kenneth V. Price, Rainer M. Storn, and Jouni A. Lampinen. DifferentialEvolution A Practical Approach to Global Optimization. Natural ComputingSeries. Springer-Verlag, Berlin, Germany, 2005.
119

BIBLIOGRAFY
[114] Silvio Priem-Mendes, Juan Antonio Gómez Pulido, Miguel A. Vega-Rodríguez,Maria D. Jaraiz Simon, and Juan Manuel Sánchez-Pérez. A differential evo-lution based algorithm to optimize the radio network design problem. Ine-Science, page 119. IEEE Computer Society, 2006.
[115] Vehicle Safety Communications Project. Final Project. Technical Report DOTHS 810 591, Vehicle Safety Communications Project, April 2006.
[116] Jorge Puente, Helio R. Díez, Ramiro Varela, Camino R. Vela, and Luis P.Hidalgo. Heuristic rules and genetic algorithms for open shop scheduling prob-lem. In CAEPIA, pages 394–403, 2003.
[117] Matija Puzar, Jon Andersson, Thomas Plagemann, and Yves Roudier.SKiMPy: a simple key management protocol for MANETs in emergency andrescue operations. In ESAS’05, 2nd European Workshop on Security and Pri-vacy in Ad Hoc and Sensor Networks, July 13-14, 2005, Visegrad, Hungary -Also published in LNCS Volume 3813, Jul 2005.
[118] Amir Qayyum, Laurent Viennot, and Anis Laouiti. Multipoint Relaying: AnEfficient Technique for Flooding in Mobile Wireless Networks. Research Re-port RR-3898, INRIA, 2000.
[119] Alain Ratle and Noureddine Atalla. Evolutionary optimization strategies forthe combinatorial design of heterogeneous materials. Evolutionary Optimiza-tion, 1(1):77–88, 1999.
[120] Ingo Rechenberg. Evolutionsstrategie - Optimierung technischer Systeme nachPrinzipien der biologischen Evolution. PhD thesis, Technical University ofBerlin, 1971.
[121] Mauricio G. C. Resende. Greedy Randomized Adaptive Search Procedures(GRASP). Journal of Global Optimization, 6:109–133, 1999.
[122] Hans-Paul Schwefel. Numerische Optimierung von Computer-Modellen. PhDthesis, Technical University of Berlin, 1974.
[123] Anselmo Pérez Serrada. Una introducción a la Computación Evolutiva. PhDthesis, ftp://ftp.de.uu.net/pub/research/softcomp/EC/EA/papers/intro-spanish.ps.gz, 1996.
[124] David J. Sheskin. Handbook of Parametric and Nonparametric Statistical Pro-cedures. CRC Press, 4 edition, 2007.
120

BIBLIOGRAFY
[125] X. H. Shi, Y. C. Liang, H. P. Lee, C. Lu, and Q. X. Wang. Particle swarmoptimization-based algorithms for TSP and generalized TSP. Inf. Process.Lett., 103(5):169–176, 2007.
[126] M. Soto, A. Ochoa, S. Acid, and L. M. de Campos. Introducing the polytreeaproximation of distribution algorithm. In Second Symposium on ArtificialIntelligence. Adaptive Systems. CIMAF 99, pages 360–367, 1999. La Habana.
[127] Ivan Stojmenovic, Mahtab Seddigh, and Jovisa Zunic. Dominating setsand neighbor elimination-based broadcasting algorithms in wireless networks.IEEE Transactions on Parallel and Distributed Systems, 13:14–25, 2001.
[128] Rainer Storn and Kenneth Price. Differential Evolution - A simple and efficientadaptive scheme for global optimization over continuous spaces. Technicalreport, 1995.
[129] Rainer Storn and Kenneth Price. Differential Evolution – A Simple and Effi-cient Heuristic for Global Optimization over Continuous Spaces. J. of GlobalOptimization, 11(4):341–359, 1997.
[130] G. Stützle. Local search algorithms for combinatorial problems, analysis, im-provements and new applications. Technica report, DISKI Dissertationen zurKünstliken Intelligenz. Sankt Augustin. Germany, 1999.
[131] TclCL. SourceForge project: OTcl and TclCL. http://sourceforge.net/
projects/otcl-tclcl/.
[132] Douglas Thain, Todd Tannenbaum, and Miron Livny. Condor and the grid. InFran Berman, Geoffrey Fox, and Tony Hey, editors, Grid Computing: Makingthe Global Infrastructure a Reality. John Wiley & Sons Inc., December 2002.
[133] Car to Car Consortium. Manifesto of the car-to-car communication consor-tium, Sept 2008. http://www.car-to-car.org/.
[134] Peter J. M. van Laarhoven, Emile H. L. Aarts, and Jan Karel Lenstra. Jobshop scheduling by simulated annealing. Oper. Res., 40(1):113–125, 1992.
[135] Steven J. Vaughan-Nichols. OFDM: Back to the wireless future. Computer,35:19–21, 2002.
[136] Christian Wagner and Walter J. Franz. Stochastic evaluation of geographi-cal forwarding in vehicular ad hoc networks. In Peter Dadam and Manfred
121

BIBLIOGRAFY
Reichert, editors, GI Jahrestagung (1), volume 50 of LNI, pages 95–99. GI,2004.
[137] S.Y. Wang. On the intermittence of routing paths in vehicle-formed mobilead hoc networks on highways. pages 803–809, Oct. 2004.
[138] Zhiwei Wang, Gregory L. Durst, Russell C. Eberhart, Donald B. Boyd, andZina Ben Miled. Particle swarm optimization and neural network applica-tion for qsar. Parallel and Distributed Processing Symposium, International,10:194, 2004.
[139] J. Whittaker. Graphical Models in Applied Multivariate Statistics (Wiley Se-ries in Probability & Statistics). John Wiley & Sons, March 1990.
[140] Kay C. Wiese, Alain A. Deschenes, and Andrew G. Hendriks. RnaPredict—An Evolutionary Algorithm for RNA Secondary Structure Prediction.IEEE/ACM Trans. Comput. Biol. Bioinformatics, 5(1):25–41, 2008.
[141] Qing Xu, Tony Mak, Jeff Ko, and Raja Sengupta. Vehicle-to-vehicle safetymessaging in dsrc. In VANET ’04: Proceedings of the 1st ACM internationalworkshop on Vehicular ad hoc networks, pages 19–28, New York, NY, USA,2004. ACM.
[142] Yun-Sheng Yen, Yi-Kung Chan, Han-Chieh Chao, and Jong Hyuk Park. Agenetic algorithm for energy-efficient based multicast routing on MANETs.Comput. Commun., 31(4):858–869, 2008.
[143] Jianjun Zhang, Gong Zhang, and Ling Liu. GeoGrid: A Scalable LocationService Network. In ICDCS, page 60, 2007.
122