Embed Size (px)
Citation preview

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 1/44
[1]
CHAPTER V
FURTHER CONSIDERATION OF THE TWO-MACHINE SYSTEM
Pre-calculated swing curves. This chapter continues the consider
ation of the problem of the stability of two-machine systems. The
equal-area .criterion, which was discussed in Chapter IV, is a very
effectivemeans of determining whether a given two-machine system isstable when subjected to a given disturbance. The most important
type of disturbance is the occurrence of a fault and its subsequent
clearing by the opening of circuit breakers. If the clearing time is
known, as it usually is, the corresponding clearing angle must be found
before the equal-area criterion can be applied; or, conversely, if the
critical clearing angle for a given transmitted power is obtained from
the equal-area criterion, the corresponding critical clearing time must
be found in orderthat
the results of the stability study will be in themost useful form.Perhaps the simplest way to find the clearing angle corresponding to
a given clearing time, or the time corresponding to a given angle, is to
refer to the appropriate swing curve in a set of swing curves which have
already been calculated and plotted, and which may be appropriatelycalled pre-calculated swing curves. Such a set of curves, obtained
by solving the swing equation on the M.I.T. integraph, was published
by Summers and McClure2 and is reproduced here (Figs. 1 to 10) by
kind permission of Mr. McClure.The curves were derived for a sustained fault on a system consisting
of a synchronous machine of finite size connected through reactance
to an infinite bus. By the methods presented in Chapter IV, however,
the pre-calculated curves can be used with a system of two finite ma
chines connected through any linear network. The usual simplifying
assumptions are made, to wit: constant input, no damping, and con
stant voltage behind direct-axis transient reactance. To make the
curves generally applicable they are plotted in terms of a dimensionless
variable, the modified time T, defined by eq. 11 below.The swing equation of a two-machine system is
d2aM dt2 = Pa = Pi - Pu
149

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 2/44
150 THE TWO-MACHINE SYSTEM
[3]
M1M2 equivalent inertia constant in megajoule-
where M = M1 + M2 = seconds per electrical degree. [2]
o= 01 - 02 = angular displacement in electrical degrees.
t = time in seconds.
P M2Pi l - M 1Pi2 • 1 · •i = M M = equrva ent Input In megawatts
1 + 2
which, either for a reactance network or for M 2 = 00 , reduces to
Pi = P i l = input of machine 1 (the generator) [4]
The equivalent power output, dependent on a, is given by the power
angle equation:
which, for a reactance network, reduces to
P« = PM sino
[5]
[6]
Expressions for Pc, Y, and PM are given by eqs. 28, 29, and 30 of
Chapter IV. For a reactance network the amplitude of the powerangle curve is
[7]
where X 12 is the reactance connecting machines 1 and 2, including the
direct-axis transient reactances of the machines themselves.
Substitution of eq. 5 into eq. 1 gives
d28
M dt2 = Pi - Po - PM sin (a.- 7)
or
where
p/ = Pi - Po
0' = 0 - 'Y
[8]
[9]
[10]
[11]
To put eq. 8 into dimensionless form, divide it by PM and then introduce a quantity r, defined by
r;;:P; /7tJPMT = t\)180 M = t\) GH

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 3/44
PRE-CALCULATED SWING CURVES 151
[13]
[12]
where f = frequency in cycles per second.
GH = kinetic energy, in megajoules, of equivalent generator at
rated speed = 180fM.
The result is:
d P ,r u i .
180' dT2 = PM - sin 8 = P - sin 8
if a is in electrical degrees, or simply
u •p SIDu
d,,2
if a is in electrical radians. Here
p/ Pi - Pcp = PM = PM [14]
and 0' has been defined in eq. 10.
A differential equation has been obtained which is independent of the
inertia constants of the machines and of the constants of the network.
The solution of the equation depends on the ratio of the input to the
amplitude of the power-angle curve (both input and amplitude beingmeasured from the horizontal axis of symmetry of the sine curve if
the sine curve is displaced vertically) and on the initial angle 50' and
initial angular speed woo For the present purpose, swing curves for
a sustained fault are wanted; hence Pn, PM, and 'Y must be the con
stants of the power-angle equation for the faulted condition, and the
initial speed will always be zero. The solution then depends only upon
p (definedby eq. 14) and 00'.
Each family of curves in Figs. 1 to 10 is for a constant value of sin
00 the range covered being from 0 to 0.90 in steps of 0.10. Theindividual curves in each family are for constant values of p, ranging in
each family from a minimum value slightly larger than the value of
sin 00' for that family up to a maximum of 3.00.
The procedure for using the pre-calculated curves to determine
critical clearing time from a given critical clearing angle may be sum
marized as follows:
1. The power-angle curve (Pc, PM, and 1') for the faulted condi
tion, the power input Pi, and the initial angle 00 are assumed to-beknown, because they are needed for finding the critical clearing
angle Dc by the equal-area criterion.
2. Compute p = Pi - Pc, P = p PM , 00' = 00 - 1', sin 50
and oc = Dc - Y.

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 4/44
152 THE TWO-MACHINE SYSTEM
160
10
60c
4 (
40
20
2 3 4 5 6Modified time T
FIG. 1. sin 00 = O.
10
10
160 t - - - - + - - __ t __
40
20
0
60c:c (
-120 t - - - + - - t - - f - 1 H 1 - - f - I - I + - i - 1 I ~ f - - - ; + - f - - - J
Q)
t:J
co 100 r---t---tt-.......... . . . , . - + + - - - H - ' - - W ' ~ ' - - -
E. . - - - - . - -1
U 80 t - - - + - - f t l - f 1 H + - 1 - ~ ~ ~ F - - : : : ' ' ' ' : = ; ' - 4 - ~ ~ - - + - ~ - - + - - - + _ - + - - - + _ - + - - - + ~ - t - - - i
4 5 6Modified time T
FIG. 2. sin 00 = 0.10.
FIGS. 1 and 2. Pre-calculated swing curves (copied from Ref. 2 by permission).

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 5/44
PRE-CALCULATED SWING CURVES 153
105 6Modified timeT
FIG. 3. sin 80' = 0.20.
3
40
160
....ene120 J - - + - ~ - U - J . . I ~ - I - ~ ~ + ' ~ - b t c - t - - - t - - - i r - - t - - + - + - - ; - - t - - ; - - t - - t - - - 1l- 100 1 - - 4 - - V - I - I - I - : H - I - ~ ~ ~ ~ ~ - ~ ~ ~ - - - i - t - ; - - ; - - - - r - - - t - - t-a 80 t - - f - - I t - ~ -:0CD~ 60<
10
160
n~ 120 . . . . - - - + - - 4 - 1 - 1 - - I - I - + + + I - ~ ~ ~ ~ ~ ~ + - - - + - - t - - - + - - - + - - f - - + - + - - - + - - I - - - + - - - - 4bOQ)
'0
~ 100 t - - - + - - - I ' f - f - - N - - - I t - - - ' ] ~ ~ ~ = - - - - - - - t - - - - ~ ~ - - - - - - I - - - t - - - - - t:soQ)
a; 80 1 - - - + - - f . j f + B t I - I - . ~ ~ ~ ~__ - - - - - - - - - t ~ ~ - - - - - f - - t - - - P l i ~ - - - - - t~~ 60c::<
20
40
4 5 6Modified time T
FIG. 4. sin 80' = 0.30.
FIGS. 3 and 4. Pre-calculated swing curves (copied from Ref. 2 by permission).

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 6/44
154 THE TWO-MACHINE SYSTEM
104 5 6Modified timeT
FIG. 5. sin 80' = 0.40.
2
160
40
20 t - - + - - + - . . . - - - + - - - + - t - - + - - - + - t - - + - - + - - + - - I - - - + - + - - + - - i - - + - - - + - - I
-)
~ 120 I - - . . . . . . . - - - + + + - + I + - I t - + - + - I - - i + - - t ~ ~ - t - - : - - ~ ~ - i - - t - - - t - + - - - + - t - - - - t - - i - - - ttoQ)
0
100 1---+--........# - I -......... - , j ~ ~ - f - - + : : . e - + - - - - + - - + - - - + - - + - - - + - - t - - - i - - + - - 1 f - - - + - - + - - - I.suQ) 80 1 - - ; - - t t - t H i H f i J ~ t - T . . . , . - t ~ ............. : : : - - t - - - t - - - - t ~ + - - t - - t - - - t - - t - - t - - t - - - - 1:0
~ 60c-c
10o,-O........-.._......-- _. . . . . . ._ •
.. ._oIoo---A.o_oI---I-.....&.-
--...._..&.--.._...........- . .o
160 t - - -+ - - -+ -
20 t--+--+-+---+---+--+---+-I---+---+--+---+--I---+--+-+---+---Io-o+----I
40
) 120 t---+--.......... 4 - - - ~ ~ ~ ~ - - - - - -bII l I ,--+-+--+--t---f---t---t--+---I '---+---f
~ 0
co 100 1 - - - + - - 1 l I - - - - j H f - , I - - I t - - - - . , I J - - , ~ L . - ~ ~U
:suQ)
:e 80 t - - - - ~ ~ ~~~ 60cc (
4 5 6Modified time T
FIG. 6. sin 80' = 0.50.
FIGS. 5 and 6. Pre-calculated swing curves (copied from Ref. 2 by permission).

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 7/44
PRE-CALCULATED SWING CURVES 155
105 6Modified time T
FIG. 7.sin
00'
=0.60.
3O ' - . . . - - - ' - - - - - - . . J . . . . . . . , j , - - - - - . J . - . . . . r . - . . . . l . - - - L - - - I - . . . . . . , j , _ ~ ' - - . . . - . - - L - - - I . . . - - ' - . . . . . . J _ _ _ 'o
160 I---+---t--
20 J - - + - - + - - + - - + - - + - - - lf - - f -- + - - + - - 1 - - - + - - + - I -- + - - + - - + - - + - - + - - - - -4 - - - 1
-120 1 - - - ~ - v - I - - W - - I - - I - - - - J ~ i L - - - - - - - J . ~ - - I : - - ~ 4 - - - - - - - 4 - ~
f-c(i j 100 1 - - - + - ~ ~ - I - + I - ~ ~ ~ + - - ~ ~ - + - - - + - - + - t - - - - + - - - + - - + - - - + - - - f - - - 4 - - - 4U
:a~ 80 ~ - - I - I - f I . I - I : - I - - I - I - ~ ~ ~ f = = - - - - - - 1 - - - l - ~ ~ I - - - f - - - - - - I - - - - - - - - I - - - - 4 ~~~ 60c<
n 120 t - - - - - ~ _ f _ l i - f _ _ t . i ~ t I - - - l _ _ - t - - - - f - - : : . ~ - - I - _ _ _ - f - - - I - - - - - - - ~ 1 - - - I~-c
B 100t - - t - - ~ ~ J t / _ - - I h ~ ~ ~ ~ + - - + - - + - - + ~ - + - + - - I - - I - - . J - - - - - I - ~ ~
:a1) 80 t - ~ f _ I r I _ I ~ ~ ~ ~ r - : : . - f _ + - - + - - - : - ~ - - I - f _ 1 - ~ ~ - - I - ~ - - l ~
° - - . .J .--- '_a.. .- ' - -- . . . .I .- . . . . . .L---J . , ;.--I . .--L_ ' --- -- ' ----&...-- ' ---L---I-J
o 2 3 4 5 6 1 8 9 10Modified time T
FIG. 8. sin 00' = 0.70.
FIGS. 7 and 8. Pre-calculated swing curves (copied from Ref. 2 by permission).

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 8/44
156 THE TWO-MACHINE SYSTEM
105 6Modified time T
3O - J . . . - . . L - - - . . . L - . . . L . . - - 1 . - . . . I . - - J . - - - L . - - . L - ~ - - - L - . . - . I - - . . . a . . - - - L - - - L . ~ - . l ~ . a . . . - - . . ao
FIG. 9. sin 00' = 0.80.
180
160
140
en~ 120 Q,)
'0
co 100-g'0Q,) 80
0
60c:
c: (
ltJt: ~ I ~ ~ 1/ j8°011) 00 II)
o 11).' ' .. ) /: ;;-;; ;; n: j- ~
J ; Q'11 7 Ji7 JI/
1111 III Ii / if 'I :Y r7I 1IJ 'I J '/JIf/ / V /11// I I I II r V . ~
/ IJvrI I if/7 V V
JJflli
rJjIfh '/ V V
I V/ V V
f-- ~ ~ /l ; »> 09 5 - _ -......-~ ,..... --- t--..r---. .......
40
20
oo 2 3 4 5 6 7 8 9 ro
Modified time T
FIG. 10. sin 00' = 0.90.
FIGS. 9 and 10. Pre-calculated swing curves (copied from Ref. 2 by permission).

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 9/44
PRE-CALCULATED SWING CURVES 157
3. Compute the equivalent inertia constant M by eq. 2.
4. Find the family of curves for the proper value of sin 00' and the
individual curve for the proper value of p. Enter this curve with theordinate 0' = Oe and read the corresponding abscissa T = Te•
Interpolation between curves or between families of curves may be
necessary.
5. By eq. 11 compute the critical clearing time te corresponding
to Te.
To determine the clearing angle corresponding to a given clearing
time, the order of the steps of procedure is altered in a way that
should be obvious.The procedure described above breaks down if the fault is of such
nature that there is no synchronizing power while the fault is on. Insuch a case PM = 0, from which it follows that p = 00 and T = 0 for
all values of t. The pre-calculated curve for this condition is the
vertical coordinate axis, and the relation between 0 and t cannot be
determined from it. However, this relation can be found by eq. 41
of Chapter IV, namely: ( )2M 0 - 00
t = [15]
Pa
Furthermore, the pre-calculated curves cannot be used to represent
conditions after clearing a fault because the curve for the proper value
of angle and speed (at the instant of clearing) does not have the proper
value of accelerating power or acceleration after clearing.
EXAMPLE 1
In Example 1 of Chapter IV, which deals with a machine connected
through reactance to an infinite bus, the critical clearing angle for the condi
tions of Example 4 of Chapter II was found by the equal-area criterion to be1380
• The corresponding critical clearing time, as determined from the
swing curve, is 0.61 sec. Check this value by use of the pre-calculated swing
curves.
Solution. From Example 4 of Chapter II, the power-angle equation
valid for the fault condition is
pu = 0.936sin 0 per unit,
whence
Po = 0, PM= 0.936, 'Y = 0;
the power input isPi = 0.80 per unit;
the inertia constant of the finite machine is
Ml = 2.56 X 10-4 per unit;

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 10/44
158 THE TWO-MACHINE SYSTEM
and the initial angle is
whence sin = 0.310.
From the problem statement,
Oc = 1380
The following quantities are computed from the data:
Pi' = P, - Pc = Pi = 0.80
p = P/ = 0.80 = 0.854
PM 0.936
sin 00 = sin 00 = 0.310
= Dc = 1380
M = M1 = 2.56 X 10-4
~ = J1I PM = I 11 X 0.936 = 8 0t \ } 180M \} 180 X 2.56 X 10-4 ·
The most suitable pre-calculated curve is that for sin 00 = 0.30 andp = 0.85 in Fig. 4. The ordinate 0' = 1380 corresponds to the abscissa
If = 4.8. Hence T c = 4.8 and
T c 4.8tc = - = - = 0.60 sec.
8.0 8.0
This agrees reasonably well with the previously found value, 0.61 sec.
EXAMPLE 2
Find the clearing angle corresponding to a clearing time of 0.30 sec. on thesystem of Example 4, Chapter III, which consists of two finite machines
connected through an impedance network. (The equal-area criterion was
applied to this system in Example 2, Chapter IV.)
Solution. The following data are obtained from Example 2 of Chapter
IV:M = 2.64 X 10-4 per unit
Pi = 0.41 per unit
Pc
=-0.044 per unit
PM = 0.203 per unit
Y = -2.9°
80 = 12.7°

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 11/44
1r X 0.203 = 3.66180 X 2.64 X 10-4
EFFECT OF FAULT-CLEARING TIME
and the following from the statement of this problem:
t = 0.30 sec.
The following quantities are computed from the data:
Pi = Pi - Pc = 0.41 - (-0.04) = 0.45
P = Pi = 0.45 = 2.2PM 0.203
00 = 00 - 'Y = 12.7 - (-2.9) = 15.6
sin 00 = 0.269
t= '1180 M=
T = 3.66t= 3.66 X 0.30 = 1.1
159
The most suitable pre-calculated curve is that for sin 00 = 0.30 and
p = 2.0 in Fig. 4. On this curve T = 1.1 corresponds to 0' = 76°.
o= 0' + 'Y = 76° - 3° = 73°
From Table 15, Example 4, Chapter III, at t = 0.3 sec. we find OAD
= 75.3°. This value was obtained by a point-by-point calculation. Theagreement is reasonably good.
Effect of fault-clearing time on transient stability limit. The
amount of power that can be transmitted from one' machine to the
other in a two-machine system without loss of synchronism when the
system is subjected to a fault depends on the duration of the fault.
The power limit can be determined as a function of clearing angle by
the equal-area criterion, and the relation between clearing angle and
clearing time can be found from the pre-calculated swing curves. It is
then possible to plot a curve of stability limit as a function of clearing
time. Such a curve is shown in Fig. 11. It shows that the transient
stability limit of the system can be greatly increased by decreasing the
time of fault clearing from 0.5 sec. or more to 0.2 sec. or less. The
time of fault clearing is the sum of the time that the protective relays
take to close the circuit-breaker trip circuit and the time required by
the circuit breaker to interrupt the fault current. Frequently a system
which is unstable for a particular type of fault and fault location can be
made stable by altering the existing relaying or by modernizing thecircuit breakers so as to decrease the clearing time. *
*Typical values of relay time and breaker time are given in Chapter VIII, Vol.
II . Modernization of breakers is discussed in the same chapter. Protective
relaying is discussed in Chapter IX, Vol. II .

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 12/44
160 THE TWO-MACHINE SYSTEM
A curve like that of Fig. 11 can be obtained by the following proce
dure. First, the equal-area criterion isused to determine the stability
limit with instantaneous clearing. Truly instantaneous clearing is not
o
1..'2::s...(1)
c....
:cnJ
en h----......
---_....................
---_..............
--0.5 1.0 (X)
Fault- clearing time (seconds)
FIG. 11. Curve of stability limit as a function of fault duration.
obtainable in practice, but it may be regarded as the limit approached
as the clearing time is reduced. The stability limit for instantaneous
clearing is the same as that for disconnection of the faulted line when
there is no fault on it. This limit is determined as shown in Fig. 12.
o 00 01 r/2 Om
Angle 0
FIG. 12. Determination of stability limit for instantaneous fault clearing by useof the equal-area criterion.
After the power-anglecurves of pre-fault and post-fault (cleared) output have been plotted, the horizontal line representing the input,
which is equal to the initial output, is shifted up and down until areaA l equals area A2• It should be noted that moving this line changes
the initial angle 80 and thus moves the vertical line bounding area A l ·

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 13/44
EFFECT OF FAULT-CLEARING TIME 161
The value of input determined by equality of the areas is plotted in
Fig. 11 as point 1 at zero clearing time.
Next the stability limit for a sustained fault is found as shown inFig. 13. The power-angle curve for the fault condition is used in place
of the post-fault curve; in other respects the determination of the
stability limit for a sustained fault is like that for instantaneous clear
ing. The value of stability limit so found is plotted as the asymptote
(point 2, Fig. 11) which the curve approaches at large clearing times.
The two extreme values of stability limit have now been found.
Any number of convenient values of initial power between these ex-
,.... C:J..D
Co.D~
2-r1P
m~ t - - ~ ~ ~ ~ ~ ~ ~ ~ ~ J - - - l -
Angle 0
FIG. 13. Determination of stability limit for sustained fault by use of the equalarea criterion.
tremes may now be,assumed, and the critical clearing angle for each is
found by the equal-area criterion as shown in Fig. 14. Power-angle
curves are drawn for the output before the fault, during the fault, and
after the fault, and the input line is drawn at one of the selected values
of initial power. The vertical line at the clearing angle a is shifted
from right to left until areas Al and A 2 are equal, thus fixing the
critical clearing angle. The clearing time corresponding to this clear
ing angle is determined from the appropriate pre-calculated swing
curve. Point 3, Fig. 11, is then plotted, its coordinates being theassumed power and the corresponding critical clearing time. Addi
tional points on the curve are determined in similar fashion.
The procedure described above, in which values of power are
assumed and the corresponding clearing times found, is simpler than

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 14/44
162 THE TWO-MACHINE SYSTEM
the alternative procedure in which clearing times are assumed and the
corresponding power limits found. For in the latter procedure the
horizontal input line is shifted, resulting in a shift also of the verticalline at the initial angle 00, whereas in the former procedure only one
line, the vertical line at the clearing angle oc is shifted.The procedure which has been described for finding transient-stabil
ity power limit as a function of fault duration is applicable only to twomachine systems. Nevertheless the general conclusion, that decrease
of fault-clearing time improves stability and increases stability limits,
o s,Angle 0
FIG. 14. Determination of stability limit for fault cleared in finite time.
is just as valid for a multimachine system as for a two-machine sys
tem. The speeding up of relay and breaker operation is one of themost effective and important means of improving power-system
stability.
EXAMPLE 3
Plot stability limit in per unit as a function of the fault duration for a
three-phase short circuit (a) at the middle of one of the parallel transmission
lines of the power system shown in Fig. 15 and (b) at the sending end of one
of the lines. The fault is cleared in both cases by the simultaneous opening
of the circuit breakers at both ends of the line. The system consists of ahydroelectric station sending power over two parallel transmission lines at
generator voltage to a metropolitan system which may be considered an
infinite bus. The following data pertain to the system. The base power
is the aggregate rating of the hydroelectric generators.
Direct-axis transient reactance of hydroelectric generators: 0.35 per unit

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 15/44
EFFECT OF FAULT-CLEARING TIME 163
Stored energy of hydroelectric generators, H: Mj. per Mva. of rating
Frequency: 60 c.p.s,
Voltage behind transient reactance of hydroelectric generators: 1.00 perunit
Voltage of infinite bus: 1.00 per unit
Reactance of each transmission line: 0.40 per unit (neglect resistance)
Reactance of transformers at receiving end of lines: 0.10 per unit
Fault Fault
(6) 0.20 <e) 0.20 0.10 tJPGydro station -0 - . -40- - - -#A Me:OPolitan
H = 3.0 systemH=oo
FIG. 15. Two-machine power system. (Example 3.) Reactances are given in perunit on a common base.
~ 0.35. 0.20 • 0.10 ~ 0:5 ~ ------<@-.
(a) (b)
FIG. 16. Reduction of the network of Fig. 15, pre-fault condition. (Example 3.)
0.35. 0.40 • 0.10 ~ 0:5 ------ @-.
(a) (b)
FIG. 17. Reduction of the network of Fig. 15, post-fault condition. (Example 3.)
0.35 0.40 1 ~'V ~ 'V
(a) (c)
(d)~ • Q:. Q-rQ.:.lQ. • 1 ~'V I0.05 '\.i (b)
. @ ~ _ ...
FIG. 18. Reduction of the network of Fig. 15 with a three-phase short circuit at
the middle of one line. (Example 3.)
Solution. The network joining the two machines, which is considered to
consist of reactance only, is reduced as shown in Figs. 16, 17, and 18 for the
pre-fault and post-fault conditions and for a fault at the middle of the line,
respectively. For the first two conditions the reduction is accomplished by

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 16/44
164 THE TWO-MACHINE SYSTEM
~/
' /Pre- fault......V
- ......) 4
J ~ , I ~ \ V Fault cieared
1/ J ~ 1\I ,
I ) ~/ V \
~ r\/ I \IJ
1\ ~ ~ ~ Fault at middle of l ine- r-, \II ~ < ,
r-, ~I f ; ~ ~ a u l t at sending end ~
1.08
1.00
--. 'c::s
8-
---
0.50
0.32
parallel and series combinations; for the third condition, by two yea con
versions and intervening series combinations. With a three-phase fault at
the sending end of one line it is obvious, without reducing the network, thatno power can be transmitted, The resulting reactances between machines,
1.50
oo 30 60 90 120 150 180
o(degrees)
FIG. 19. Determination of stability limit for instantaneous clearing of a fault at
either location and for a sustained fault at the middle of the line. (Example 3.)
and the amplitudes of the power-angle curves (PM = EAEB/XAB= l/XAB),are as follows: .
ConditionReactance PM(per unit) (per unit)
Pre-fault 0.65 1.54Post-fault 0.85 1.18Fault at middle 2.45 0.41Fault at end co 0
The power-angle curves are plotted in Fig. 19. The stability limit for
instantaneous clearing is found by the equal-area criterion in the upper part
of this figure. The value thus found, 1.08 per unit, is correct for both fault
locations. The stability limit for a sustained fault at the middle of the line
is found in the lower part of Fig. 19; it is 0.32 per unit. The stability limit
for a sustained three-phase fault at the end of the line is zero.

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 17/44
TA
1
D
MIN
O
OC
A
N
TME
FR
M
C
A
N
A
EX
MP
3
sn
FuaMideoLn
FuaE
Ln
P
P
0
s
p.u.
d
T
tc=
T
50
-0
to
15
p
=Pi04
d
fompecc
se
deg.
d
s
fomFg2
cuv
fomFg2
10
06
4
25
5
04
00
46
6
00
09
05
3
22
60
07
01
5
1
01
08
05
3
20
7
10
02
5
2
01
07
04
2
17
8
13
02
.
.
·
06
03
2
15
9
16
03
7
5
02
05
03
1
12
1
22
04
.
.
·.
04
02
1
10
1
31
06
9
8
03
0302
1
08
1
60
11
.
.
·
02
01
8
·
.
·
·
1
1
05
01
00
4
·
.
·
·
1
1
08
0000
1
·
.
·
·
1
1
12
t a t3 d at
4t > Zo t
J t

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 18/44
166 THE TWO-MACHINE SYSTEM
Pre-f au l t y
J 1 / I r-.......
IJ.
0.32 1-1..1-
Vi11111I 11j . ;
:--.: I - - Faultat middle of line I ............. \ I I I I I I I I I r-....1\
I , I I I I I I I 180120 : : 150
111 130 144i i 60
455130 : : 90:
70 82 956 (degrees)
FIG. 20. Determination of stability limit as a function of clearing angle by useof the equal-area. criterion, three-phase fault at the middle of the line. Areas for
P = 0.50 are shaded. (Example3.)
Stability limits between 0.32 and 1.08 per unit are assumed with the fault
at the middle of the line, and the corresponding critical clearing times are
found in Fig. 20. Stability limits between 0 and 1.08 per unit are assumed
with the fault at the sending end of the line, and the corresponding critical
clearing times are found in Fig. 21. In both figures curves of stability limit
as a function of clearing angle are plotted. The values of clearing angle are
entered in Table 1.The values of clearing time corresponding to these values of clearing angle
are found from the pre-calculated swing curves if the fault is at the middle
of the line and from eq. 15 if the fault is at the end of the line. In the first
case the numerical value of Tit is needed. Byeq. 11 it is
: = ~ 7 T P M = /7T' X 60 X 0,41 = 5.08t GH '\j 3.0 X 1
In the second case we have from eq. 15
2GH (<<5c - «50)
180 r,2 X 3.0 X 1 (<<5 c - «50) =
180 X 60 Pi - P..
Details of the determination of clearing time are given in Table 1.
Curves of stabil ity limit as a function of clearing time are plotted in Fig.
22

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 19/44
EFFECT OF FAULT-CLEARING TIME 167
Pre- fault-V-
J - 17\- ~
~ -- - - 0-\: 1: :___ ~ ~ u l t cleared-- -- , I , I ~-- I . . -- Stability limit _
, , I vs. clearing angle ~: II I I
{7 lY1I I -~ I ~ ~-- -- '- I - 11 - - -'- - - -
: I I I I , I I I I\.. I
if' , I I I
~ II I I~ I I , - - --7:; -t- - 1-,- - ' I -,- ~ ~: I ~I I I 1 0..I I~ I I . ' ..... ~ ~ ~ ~I Faut at end of line
, I ~ ~ I I ~/ r/ /i j j : . -
~ 1/ // 1 / / / /// / ~ v/ / ,
1.30
1.08
1.00
-=c:'~-e 0.50
oo 30 : : :60 90:
465258 75 95o(degrees)
120 150 180
FIG. 21. Determination of stability limit as a function of clearing angle by use ofthe equal-area criterion, three-phase fault at the sending end of the line. Areas
for P = 0.20 and P = 1.00 are shaded. (Example 3.)
1.4 ex>.5 1.0Fault- clearing time ( seconds)
'\1\
1\\\ f\
' \1\
\ .< ,
\ r - Fault at middle of line11 --
t\. t'--.... f l l - --, II ==
'L- Fault at sending end of line
- -
-: . . . -o
o
~ 0.5
1.0
FIG. 22. Curve ofstability limit as a function of fault-clearing time for the systemof Fig. 15. (Example 3.)

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 20/44
168 THE TWO-MACHINE SYSTEM
Curves for determining critical clearing time. A more direct way of
determining the critical clearing time of a fault on a two-machine
system than that described in the first part of this chapter has beendeveloped and described by Byrd and Pritchard.f Their method
facilitates the plotting of curves of stability limit as a function of fault
duration. It takes cognizance of the fact that the voltages behind
transient reactances, and hence the amplitudes of the power-angle
curves, usually vary with the power transmitted in a way determined
by operating practice. This fact was disregarded in our previous
discussion, although allowance could have been made for it.In Byrd and Pritchard's method two assumptions are utilized in
addition to those which were made in developing the equal-area criterion. They are:
1. That the network is purely reactive.
2. That all circuit breakers which open to clear the fault do '80
simultaneously.
Both these assumptions are commonly, although not necessarily, made
in using the equal-area criterion in order to simplify the calculations.
The derivation of Byrd and Pritchard's method follows: Let thepower-angle curves of the two-machine reactance system be:
Before the fault: Pu, = Pm sin 0
During the fault: Pu, = T1Pm sin a
After the fault: Pu, = T2Pm sin 0
[16]
[17]
[18]
In other words, Tl and T2 are the ratios of the amplitudes of the power
angle curves during and after the fault, respectively, to that before the
fault. Inasmuch as the amplitude of the power-angle curve of areactance network is given by eq. 7,
p _ E1E2
m - X12
[19]
[20]
it isapparent that f l and T2 may be expressed in terms of the reactances
between machines before, during, and after the fault, thus:
X 12 before faultT1 ==X 12 during fault
X12 before faultT2 ==
X 12 after fault[21]

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 21/44
CUltVES DETEltMINING CRITICAL CLEAItING TIME 169
It is also apparent that, if the internal voltages E1 and E2 should vary,
the amplitudes of all three power-angle curves would be changed
proportionately, and the ratios rl and r2 would not be affected.The three power-angle curves and the input line Pi are drawn in
Fig. 14 so that the equal-area criterion may be used to find the critical
clearing angle oc. Ordinarily the two shaded areas are equated. It is
just as correct, however, to equate the irregular area under the heavy
line to the area of the rectangle below the input line. If this is done,
the following equation results, from which Oc can be found:
[22]
Upon setting Pi = Pm sin 00 and evaluating the integrals, eq. 22 becomes:
(Om-OO)Pm sin 80= -rIPm(COSOc-coSOO)-r2Pm(COSom-cosoc) [23]
(om - 00) sin 00 = (r2 - rl) cos Oc + rl cos 00 - T2 cos Om [24]
(om - 00) sin 00 - Tl cos 00 + r2 cos Omcos Oc = [25]
r2 - rlwhere
[26]
Thus, if TI, r2, and 00 are known, the critical clearing angle Oc can be
found from eqs, 25 and 26. The corresponding critical modified time
Tc can then be found from pre-calculated swing curves (Figs. 1 to 10)
which are solutions of the swing equation (13) in which 0' now is
simply 0 and p = (sin oO)/rl. The actual clearing time to in seconds
can be found from the equation
~ 8 M I GHtc = T
c 1rrlPm = Tc \ j ~ f r l m [27]
which differs from eq. 11 in that PM has been replaced by TIPm, the new
symbol for the amplitude of the power-angle curve during the fault.
The steps which serve to determine T c as a function of Tl, T2, and sin
00 were carried out for many values of the independent variables, and
the results were plotted in the form of curves of Tc versus r2 for constantTI and sin 00. See Figs. 23 to 39. Each family of curves is for a con
stant value of sin 00, the range covered being from 0.10 to 0.90 in steps
of 0.05. The individual curves in each family are for constant values
of Tl.

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 22/44
170
1.0
0.8
0.6
0.4
0.2
THE TWO-MACHINE SYSTEM
J I
~ ~I I Tl I J rr
0 , l- I 8 &t)1
8 .....1-0 ..... .....
0 1-0 0 0
1 -1 - II
II j.......
c: ,, 'rJ ..,.... II I
I
I' J J J JII III I I r,
--If..r . ~ ~I I I r1 I
( ) .'I I.J //
I < [ ; ; j j l ; t ~I Il...l
1...oIl L..I .... L. .1iiJ I.....l ..... looII .... L I . I I I ~ L-L- -. ...
oo 1.0 2.0 3.0 4.0 5.0
1.0
0.8
0.6
0.4
0.2
FIG. 23. sin 80 = 0.10.
I I I I I I J I , l I I I I I
i-H &t) - - ~ o l I I I0 i- t)
8lI t ' ) ..... , f-1- C\I f- 1 ( ' ) , ..... 0 .......... i - f - ..... - : IJd , 0 _0 _ 1 - 0 1- ' -
_ _ 00
f- f- II ~ 1 1 - .....
I- :: ....... f- ........ J - :: c: f - I - ,-- ........, ........JI'-I- I- I - i -- - ,
J I r 1j I' II, , I -,
I' j If 'I.I I I IJ ]
J ,II IJ ..oil
v II' 1...oIl
v l....l
II' L...II I....ll ~ L -
L...o ..... - 1 -1 - ....
-oo 1.0 2.0 3.0 4.0 5.0
FIG. 24. sin 80 = 0.15.
FIGS. 23and 24. Curves for determination of clearing time (copied from Ref. 3by permission).

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 23/44
CURVES DETERMINING CRITICAL CLEARING TIME 171
I I I I I I ,• •
I • I ,
1-+-1 - - 0 i - I - - --fir) : I ,I t)
If? 'raj
0 ..... --- - ....0 1 - 1 - ' - ~ J i - ' - - ---0 0 '0 '
11
~ ~ 1 -1 - - II J IIi-i-i-
.. .0-#i - I - -
= -' 4,. I 1...i-i-i- i-i-
i-i-r- i - I - --- : II I
, J J J, I I I-I-, J /2
I , o ~ v v f ~j ,,- l. ,lI ilI
~ ..... '. ,.- i.oooioooo .... ~ ., - , 10.-.... .- -- ...- ..-- ...... ,..-
t - 0.25_
Tc
FIG. 25. sin 80 = 0.20.
1.0
0.8
.. .N 0.6
0.4
0.2o 1.0 2.0 3.0 4.0 5.0
1.0
0.8
a ' 0.6
0.4
I, ~ i - ~ ~ ~ ~ i - i-
I II I I I ~ i=--l l )
1:fJt ~ K > ~ ~ ~C? - f- ..... t- - i-
I-d I - - - -1 ° o l- e - l- e:) -....--I- CV i- C\J
~ /IT II II ~ - J ~ I- C:i J
.. .M~ 0-# ~
a..' J - a..... 1 a.... I-:-- - II - II II
i- i- I -- -a.. - i- J...
I I t-- i-
I/ / 'I I I t ) ; ~ ~ lJ III J J ,,-
r-J'I.IJ
(; i ~ 1 -
J II ~ ~I J , , ~ ~, ~ ~ ~ ~ [. II i.lIII .....
~ i l I ~ i l I -... ..... ........ 1.1--...
.- 1.1...._.. -... -- --- t
Tc
FIG. 26. sin 80 = 0.25.
0.2o 1.0 2.0 3.0 4.0 5.0
1.0
0.8
... 0.6
0.4
1--- I - - ~ a . n tW II I I r I I , t I I I , I I , I
ttC:fJI ~ I
::r'/fI-- I-
0 I-S lili-r - - i - 0 OJ 10·
>- °ti- .... f - ~ c : : ) l 10. 'O·t-_
- f- II I
II :1-11 ~ i - -i- II I II 1 II- ...
- a.....~ ~ . . . , , , c: j
I-i- - i.: 1 ... t : i- Ji- 1-- ,1 I I ,II I I IJr II v
I I I v ~
', ~ .,, ~ ~ I - ~~ ~ - ---,-
--, - -
p
0.2
o 1.0 2.0 3.0 4.0 5.0
FIG. 27. sin 80 = 0.30.
FIGS. 25, 26, 27. Curves for determination of clearing time (copied from Ref. 3by permission).

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 24/44
172 THE TWO-MACHINE SYSTEM
-- - ~ ; U ~ ; ~ t ~ I t ~ t t ~ i ~ I I I I .I- t - ~-- - 0 2 2 9i>-fil 1-- ~ :1
I r l ~ ........-- - 0 1-- ~ i ~......- - .... 11
/I II II II
t-II ~
1-- O' J 10
,
--....
---- .... - ---- II ~ : _ If
rj'------__ a..;
:-c: 4.' 'f I-4.' 'f
j'- _
i--- 4.' 'f.,-._ .....,/J .....,I II I 1/ J vII I J
If' v
v I;' I L. l
J v ~ I...... I.....
I I J v l,;Ill IlllI' L... 1...- ......
J L. l ~ ~ . . - ~ i i I ~ .... ~- - - ~ 1 1 1 ~ ...... _I.- ...
I I
I III I
1.0
0.8
...... 0.6
0.4
0.2o 1.0 2.0 3.0 4.0 5.0
1.0
0.8
....0.6
0.4
FIG. 28. sin 80 = 0.35.
I I I I I II I I I I 1- 1/ I I I 1/ I II IIT:J:,.
1-1- ~ 8 r ~ [ .... W ~ f 1- 0 ~ ~ ~ r i l ~ t ~ ~ ~ ~ I I ~ ~ ~ ~ - t:i tt; ~ ~ O' ...- O' 1-..... O' II O' - 1 -1 -
1-1- ~ ~ ~ j ~ II t . . ~ II.... _ ~ --1- 1/ ~ .... P 1/
~ .... .... ~ II J tt I j ~ ~ ~ '''''1} ... -\ if
... c:1- - 4. f ~ f-- ~ 1 ~ 1 -
I-~ ,
I , ~ ,I I ~ ,. ~~ ~ ~ ~ J
J
,if ,
J ~. .l....IIlI l . . . o I ~ ,- ~ .... _..... - ...
-- - '---
Tc
FIG. 29. sin 80 = 0.40.
0.2o 1.0 2.0 3.0 4.0 5.0
T
cFIG. 30. sin 80 = 0.45.
FIGS. 28, 29, 30. Curves for determination of clearing time (copied from Ref. 3by permission).

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 25/44
CURVES DETERMINING CLEARING TIME 173
J II II I 1 II J IJI J I '(
II J J ] v J11
I II I 1/ II II 1 ~
5.0.0.0.0.00.5 '-'-__ ---..........,,- - . . I o . . . I ~ - - I - I o . . . . - . . ...r....I
o
FIG. 31.. sin ao = 0.50.
...
1.0
0.9
0.8
0.7
I- I I
fS; f1- ~ g l ~ , I I II L ~ ~ j I I II t )
~ ~ 'O J L -L - t ~ 1-1- ~ 'I I f II- 0
I I ~- 0 0 o O i 'I- t;;:)' tr ~ I I J ~ ,...
I- l- II : II II ~ I- III-
.. ...1 - 1 - ~ ti- II I I c::r
I- .. ..............., ......., I-1 - 1 -
(,.....,J l- I- .... fo
'I 'I I I If 'f( . . . , l - I-
J J IJ IJ rt-fo- ....I I I I T 1
I
, i J vj , , vI I II , ~
'I J J, ~
1.11 ~ ..,l...oillill,
J ~ I..- 'I IlIlII' ..,--
1...- - _.......I, ~ ~ ,,- L-'-'
_..._L- ... '
0.6
0.5o 1.0 2.0 3.0 4.0 5.0
Tc
FIG. 32. sin ao = 0.55.
FIGB. 31 and 32. Curves for dete rmination of clearing time (copied from Ref. 3
by permission).

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 26/44
174
...e-t 0.8
THE TWO-MACHINE SYSTEM
I I , ~ ~ ~ ~ ~ ~ __ ~
~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ -
FIG. 33. sin 80 = 0.60.
I , O ~ I ~ I ~ 1 4 - ~ L ~ _ ~ I ~ I I I I I I
s ~ ~ ~ ~ - t8 /f{ ~ ~ ~ ~ ~ ~ ~ > o - F f 8 l-1 0 0 c ; - c ; ~ ~ . - () ~ <:>. f- ~ t : : ~ t::)
~ /I I /I ~ zr q I ... II /t t.- ~ _ /t ~ I I . : ->0-- 4 ~ -
c:I.;.J , .... 1... J 1... - ~ -1 ~ - ~ I I - ...,-:: ' \ ~ 2 ~ : ~ ,\'\0
- l- '('\ ~~ ~ I, I II I ~ lA I 1:1 0 _
J J I ) ~ ~ ~ ~ ~I I ~ ~
1\L..;;;..... 1 I I I ~I , ~ ,,- L . . o o ~
I f I I v~ ~ ~ ...... ~ - - - - ~~ J If' v: --' ..... . - .... ....- ...... 10-- ....
i I o o o l I ~ .... ..
. ,
1.0
0.9
... 0.8
0.7
0.6o 1.0 2.0 3.0 4.0 5.0
1.Q
0.9
0.8
FIG. 34. sin 80 = 0.65.
I
~ ~ & ~ l qr J > - ~ ~ W IJ
I , I I I J , I I , , ,- 0
Ort' I I I 1 1 ~ < i ) I- -- _0 o c::i Ci O' I I ()-:
-- I /Ht Ht : :r-I/O li- J
I If' I ~ I I
- ...... 'J 14,. J 4,...tr-- - v- v- 0( , ~ 'D,I-~ ( ) ~ ~ ~t I , ~ .C \ ___ .... -I I I II 1...- ~I I ~ ~ ~ , ~ ~ ~ _... -, ~ 1 . . . o I l I ~ ....- - ~ ... ~
_...11 -
0.7o 1.0 2.0 3.0 4.0 5.0
FIG. 35. sin 80 = 0.70.
FIGS. 33, 34, 35. Curves for determination of clearing time (copied from Ref. 3by permission).

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 27/44
CURVES DETERMINING CRITICAL CLEARING TIME 175
1.0
0.9
0.8
~ ~ I ~ t ~ ~ t f l l ~ ~ X i ~ ~ W d ' l IIi} I I ~ ~~ 0'Yo 0:' If' T T ~ ~ 1 - 1 -~ O 0 t::i O' O' o 0'// 1 ~ : t 1 -1 - ~ T o ~
u: : J ~ ~ I - ~ ,<, ~ ~'h...-- I - ~ .,
11 } I I v lIi ..... I.....
I . ~ 1..-.....
J J I/' '
l . . . . o l I ~l..o
~ ~ ...'I ~ .,. ~ jllIII L . o o ~ '-
io _I-
0.7o 1.0 2.0 3.0 4.0 5.0
FIG. 36. sin 00 = 0.75.
030
r'= .'1 = O. 0 rrl =0.40
o J1/ ~ r ~ J ~ ~ a ~ \ f f i 1 < j - ~ B : - t \ i P 17;L ~ ~ . ~ ~ ~ ~ o ' f . ~ a:t a : l , ; ~ ~ o . ~ ~ Iio \ ) ' b \ < ) ~ , 'r .1:- ; I i • Ci
J -/t ' - ' h ~ ~ - t \ ~ , , ~ 1 . t ~ . , , ~ - 1 ' \ I ' ~ ~ ~ - ~ ~ . . - ~ ~ o ~ z ; ; . . - e
t-, 11 ~ - I ~ I - f - < ~ tt . ~ --- ~ \ - , , ' - ~ - ~
11'1 I.' 1....1 I..- 1.1I ...... ... 1 - ....... L. - .... 11I
r:r/: ~ ~ ~ l..o.IlIl-- ~ ~ ...-...... '-- ... 1-- ..... 1.-:- ~ i I - '
1.0
~ 0.9
Tc
FIG. 37. sin 00 = 0.80.
0.8o 1.0 2.0 3.0 4.0 5.0
1.00
0.95
0.90
o 0 ~ ~ ~ ~ ~ O ~ I - ~ ~ ~ ~ I Wo'>v
- n,F-f- rt> - ~ v~ I - ~ o· f-f- oep co' Alo,,,
- I I- 1/ 1/ rlf- f-I- // < ~ ~ < . t ; ~ ~ ~ - ?I- 4.. .... - r- ....jf - ..... < ) I . ~ (,
............ ~ . . . ~ ' J ~ l-I..;
r J I;' I;l' I.l'
II IJ l' I.... ~ I...- ~ ' - 'j J I.l' i...ll ijll'
I v ~ ~--
..... jllIII t -
IJ ~ 1....1 L....o ..... ~ , . . . . II ....... JI 1....1 l.olII
Tc
FIG. 38. sin 00 = 0.85.
0.85
o 1.0 2.0 3.0 4.0 5.0
~ .... ~ ~ * ~ Y / ) 4 : < § l - l l i ~ ' j - t 1 ~ ~ : 1 C i L... II 0 .....
~ ~ D ~ 0 9 ..... ~o l- e::; O· O· + 0 ' ~ ~ ( ) . t . ~ ~ ~ ( ) . O ~ ~ ~ . , . - II 1/ ' ( ~ ~ L . , - -f- ~ \ . . . . - I ~ - ' - t ~ ~ ~ h ~ -'
1 \ ~.....
... -) ...; 4..' ..... ~ . . . . . _ l0- ll
, I v: - ' ',- ... , Iiiiiii
I I.. - - ----
- ~ ......
IT
1.00
... 0.95
0.90
o 1.0 2.0 3.0 4.0 5.0
FIG. 39. sin 80 = 0.90.
FIGS. 36, 37, 38, 39. Curves for determination of clearing time (copied from Ref. 3by permission).

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 28/44
176 THE TWO-MACHINE SYSTEM
1.0.9.8.7.4 0.5 0.6rJ or r2
0.3.2.1
I iJ
v1/
iJ
II'1 /
J
VII
/
vV
WI
I;
v:,.,
l.',.,,.,
I'
'-'l;l
I#
oo
0.1
0.3
0.4
0.7
0.9
0.8
0.6
0.2
It is convenient to have an additional curve for determining the
stability limits for instantaneous clearing and for sustained faults. To
obtain the equation of such a curve refer to Fig. 12, which shows theapplication of the equal-area criterion to the case of instantaneous
1.0
c 0.5
FIG. 40. Curve for determining the stability limit for a sustained fault or for afault cleared instantaneously (copied from Ref. 3 by permission).
clearing, and equate the area of the rectangle under the Pi line between
ao and 6m to the area under the post-fault power-angle curve between
the same limits.
Area of rectangle = Pi(8m - 60) = Pm(6m - 60) sin 60
Area under power-angle curve=T2Pm16m
sin as=T2Pm (cos - cos 8m)
Equating the two areas, we get
am - ao) sin = T2(COS ao - cos ~ m [28]

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 29/44
CURVES DETERMINING CRITICAL CLEARING TIME 177
where 8m is as given by eq. 26. Equation 28 expresses implicitly a
relation between T2 and sin 80 which is plotted in Fig. 40. To find the
stability limit for instantaneous clearing, enter this curve with T2 andread sin 80• Then the stability limit is Pm sin 80• The same curve can
be used to find the stability limit for
a sustained fault by entering it with P
the value of TI instead of T2; this be
comes evident when Fig. 13 is com
pared with Fig. 12.
It has already been mentioned
that, as the transmitted power (Pi ==
Pm sin 80 ) varies, the internal voltagesE1 and E2 usually vary, and hence
Pm = E1E2 X 12 also varies. For the
present purpose the most useful way a0------------ ' ·to show these relations is to plot Pi sin 00
and Pm against sin 80, as shown in F 41 T · 1 f P d0. . ypica curves 0 , an
Fig. 41. r; versus sin
The procedure for obtaining a curve
of power limit as a function of fault duration by Byrd and Pritchard's
method will now be summarized.
1. Reduce the reactance network to an equivalent between the
two machines and neutral for each of the three conditions:
a. Before the fault.
b. During the fault.
c. After clearing the fault.
Only the reactances X 12 between the two machines are used in what
follows.
2. Compute the equivalent inertia constant M by eq. 2.
3. Calculate and plot curves (like those of Fig. 41) of
a. Pm = EIE2 X I 2 versus sin 80
b. Initial power Pi versus sin 80
maintaining the bus voltages at the values which would be held in
actual operation.
4. Compute TI and T2 by eqs. 20 and 21.
5. a. Enter the curve of Fig. 40 with Tl and read sin 80• From
Fig. 41 read Pi corresponding to this value of sin 80• This is the
stability limit for a sustained fault.
b. Repeat, using T2 instead of TI. The value of Pi thus found isthe stability limit for instantaneous clearing.

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 30/44
178 THE TWO-MACHINE SYSTEM
6.t Select values of sin 00 which are multiples of 0.05 and which
are between the values found in steps 5a and 5b. For each such
value of sin 00 find the proper family of curves from Figs. 23 to 39;find the curve for the value of Tl; enter this curve with T2 and read
Te•
7. For each value of sin 00 used in step 6 read the corresponding
values of Pi and Pm from the curves of step 3 (like Fig. 41).
8.t For each value of Tc found in step 6 compute the clearing time
teby eq. 27, using the proper value of Pm determined in step 7.
9. Plot stability limit Pi as a function of clearing time te• This
curve will look like the one in Fig. 11.
The method which has been described fails if Tl = 0, since for this
caser = 0 and t is indeterminate from eq. 27. To avoid this difficulty
a new modified time p is now introduced, related to the actual time t by
t = p J180M = p IGH . [29]7rPm ~ r f m
and differing from Tin eq. 27 in that Pm, the amplitude of the pre-fault
power-angle curve, is used instead of T1P
m, the amplitude of the fault
power-angle curve. Hence p = T/Vi). The swing equation now
becomes
p =
with 8 in electrical radians, and it has the solution
2(0 - 00)
.sin00
[30]
[31]
which will be recognized as eq. 15, transformed by the substitution of
eq. 29 for t, and with 0 - 00 expressed in electrical radians.
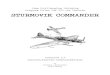
Given Tl = 0 and the values of T2 and sin 00, Pc may be found by
using eqs. 25 and 26 to get oc, and then eq. 31 to get Pc. From the
results of such calculations Pc has been plotted in Fig. 42 against sin 00
for various values of T2.
If Tl = 0, steps 6 and 8 of the procedure are replaced by steps 6A
and 8A, respectively, which are as follows:
6A. Select values of sin 00 which are between zero and the value
found in step 5b. Find the curve in Fig. 42 corresponding to the
[If r l = 0, substitute steps 6A and 8A, described on this page and page 180,
for steps 6 and 8, respectively.

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 31/44
a a t td a z zo § : a ; Zo sl j
70
65
60
55
50
45
40
30
25
20
1.5
35
P
Cvfodemnncentmf=
0 coedfomR3bpmso
FG4
05
10
o o
10 08 060 c
04 2
c

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 32/44
180 THE TWO-MACHINE SYSTEM
value of r2. Enter it with the selected values of sin ao and read the
corresponding values of Pc.
8A. For each value of Pc found in step 6A compute the clearingtime tcby eq. 29, using the proper value of Pm determined in step 7.
EXAMPLE 4
Plot a curve of stability limit as a function of fault duration .for a three
phase fault at the middle ofone of the 132-kv.transmission linesof the power
system of Fig. 43. The two hydroelectric generators i and k are to be ra.
0.175
3.0/13.2O l 7 ~33.0/13.2
0.30
0-111:0.35
0.35 )(
6.6/132Fault
.6. A-
0.140 33.0/13.2
0.140 f----®33.0/13.2
FIG. 43. One-line diagram of power system, with reactances of lines and trans
formers in per unit on a lOO-Mva. base (Example 4). Data on generators and loadsare given in Table 2. (From Ref. 3 by permisslon.)
garded as one machine of a two-machine system, and the steam turbo
generators, a, b, g, and h, together with loads c, d, e, and J as the other
machine. Each load is assumed to consist of three equal parts, one of
resistance, one of synchronous motors operating at half load, and one of
induction motors at 1/2.75 load. The reactances and inertia constants ofthe generators and of the composite loads are given in Table 2, expressed onabase power equal to the rating of the individual generator or load. In Fig.
43 the reactances of the lines and transformers are given on a base of 100Mva. and nominal voltage. The system frequency is 60 c.p.s,
Solution. The procedure described on pp. 177-8 will be followed.
1. Network reduction. All reactances will be expressed on a system base
of 100 Mva, The reactances in Fig. 43 are already on this base. The

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 33/44
CURVES DETERMINING CRITICAL CLEARING TIME 181
machine reactances in Table 2, given on the machine base, are converted to
the system base by multiplying them by (100 Mva.)/ (machine rating in
megavolt-amperes).TABLE 2
MACHINE REACTANCES AND INERTIA CONSTANTS (EXAMPLE 4)
Rating,
Hd
Machine Kind Mva. P.F.
Machine System Machine SystemBase Base Base Base
a Turbogenerator 40 0.8 0.18 0.45 6.0 2.40b
c Composite load 55 0.9 0.56 1.01 1.95 1.07d 30 u 1.86 0.58e
u
f u 55 1.01 1.07g Turbogenerator 50 0.8 0.18 0.36 6.0 3.00h i Hydro generator 29. 4 0.85 0.30 1.02 3.0 0.88k u u
The network is so nearly symmetrical about a horizontal axis that the
reduction may be facilitated with very little sacrifice in accuracy by assuming that the two sections of the long receiving bus are tied together and also
that the load busses d and e are tied together. In addition, machines i and
k are assumed to be tied together behind their transient reactances; ma
chines a, b, c, d, e, j, g, and h are assumed to be tied together similarly.
Then, after simplifying the hydroelectric-station circuits and the receiving
system by series and parallel combinations, the circuit of Fig. 44a results.
The reactances of the three parts which are separated from one another by
transformers are given on a common power base of 100 Mva, and on voltage
bases equal to the nominal voltages of 6.6, 132.0, and 33.0 kv, It will benoticed that the ratio of the receiving-end transformers, 125.4 kv./33.0 kv.,is not equal to the ratio of base voltages, 132.0 kv./33.0 kv, Therefore the
base voltage for the receiving system should be changed from 33.0 kv. to
33.0 X 132.0/125.4 = 34.7 kv.; the reactance of that system on the new
base is
0.13 X (33'0)2 = 0.12 per unit34.7
The new value is shown in Fig. 44b. Parallel and series combinations give
the result shown in Fig. 44c for the pre-fault network. Xu = 1.10 per unit.The faulted network is obtained by grounding the midpoint X of one
line in Fig. 44b. Then a ~ Y conversion, series combinations, and a ~conversion lead to the ~ network of Fig. 44d. X12 = 7.20 per unit.
The post-fault network is obtained by omitting one of the parallel lines of

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 34/44
182 THE TWO-MACHINE SYSTEM
Fig. 44b. Then a series combination leads to Fig. 44e. X 12 = 1.28 per
unit.
2. Inertia constant. The inertia constants in Table 2, given on the machine base, are converted to the system base by multiplying them by (rna-~ ~ ~ a
6.6/132 kv. 0.35 125.4/33.0 kv.
051 O . ~ 1 5 2~ ~ 3 ~ b0.35
/>. ~vvv (c)
(d )
~ ~ (e)
FIG. 44. Reduction of the network of Fig. 43 (Example 4). The reduced networksare given by c for the pre-fault condition, by d for the fault condition, and by e for
the post-fault condition.
chine rating)/(100 Mva.). Then
HI = Hi+ H k = 1.76
H2 = Ha+ Hb+ H c+ Hd+ He+H/+ H, + Hh = 14.1
H = H1H 2 = 1.76 X 14.1 = 1.56
HI + H2 15.9
3. Curves ofP« andPi versus sin 00. Assume that 132kv. (1.00 per unit)
is maintained on the high-voltage side of the step-up transformers, and 33.0kv. (0.95 per unit) is maintained on the low-voltage side of the step-down
transformers. The voltages behind transient reactance, E1 and E21 as
functions of the initial angle 00 between them, can be found from the vectordiagram of Fig. 45 by assigningarbitrary values to the current I and solving,

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 35/44
CURVES DETERMINING CRITICAL CLEARING TIME 183
either graphically or by trigonometric computation, the resulting triangles
for E ll E2, and 00. Then P« and Pi are calculated from the relations
P _ E1E2 _ E1E2
m - Xl2
- 1.10
and
Pi = Pm sin 00
0.661 0.121
FIG. 45. Vector diagram for determining E1 and E2 as functions of (Example 4).
TABLE 3
CALCULATION OF Pm AND Pi VERSUS sin ao (EXAMPLE 4)
P, EI E2 sin Pm
0.125 1.106 0.933 7.7 0.134 0.9350.250 1.121 0.934 15.3 0.264 0.9480.375 1.145 0.936 22.7 0.386 0.971
0.500 1.177 0.939 30.0 0.499 1.0010.750 1.267 0.950 43.6 0.689 1.0901.000 1.373 0.972 55.9 0.828 1.221
The results of the calculations are given in Table 3. Curves of Pm and Pi as
functions of sin 00 are plotted in Fig. 46.
4. Computation of f l and f2 . By eqs. 20 and 21,
1.10 3f l= 0.15
7.20
1.10r2= -= 0.86
1.28
5. Stability limits for sustained fault and [or instantaneous clearing.
a. Sustainedfault. Entering the curve of Fig. 40 with f l = 0.153, we read

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 36/44
184 THE TWO-MACHINE SYSTEM
sin 80 = 0.117. Entering the Pi curve of Fig. 46 with this value of sin 00, we
read Pi = 0.110.
b. Instantaneous clearing. Entering the curve of Fig. 40 with '2 = 0.86,
I
/Pm /
v1----- J
/
J V
//1>;
/1/
V
0.5
1.0
oo 05 IDsin 00
FIG. 46. Curves of Pm and Pi as functions of sin 80 (Example 4).
TABLE 4
CALCULATION OF POWER LIMIT Pi AS A FUNCTION OF CLEARING TIME te(EXAMPLE 4)
1 2 3 4 5 6
sin 80 Pi Pm Tc/tcteTe (sec.)
0.80 0.933 1.18 4.68 0.13 0.030.75 0.843 1.14 4.57 0.24 0.050.70 0.763 1.10 4.50 0.35 0.080.65 0.690 1.07 4.44 0.45 0.100.60 0.623 1.04 4.37 0.55 0.130.55 0.560 1.02 4.33 0.67 0.150.50 0.500 1.00 4.29 0.78 0.180.45 0.443 0.986 4.26 0.90 0.22
0.40 0.390 0.973 4.23 1.07 0.250.35 0.336 0.963 4.21 1.26 0.300.30 0.285 0.954 4.19 1.50 0.360.25 0.236 0.946 4.17 1.79 0.430.20 0.188 0.940 4.16 2.29 0.550.15 0.141 0.936 4.15 3.31 0.80

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 37/44
SUMMARY OF CALCULATING TRANSIENT STABILITY 185
1\\,
\ 'i\
,' r-,
............ ............ r - - . . ::::-
we read sin 00 = 0.825. Entering the Pi curve of Fig. 46 with this value of
sin 00, we read Pi = 0.995.
6, 7, and 8. Stability limii« [or finite clearing times. These three steps arecarried out in Table 4. In col. 1 are entered values of sin 00 from 0.15 to 0.80
at intervals of 0:05. In cola. 2 and 3 are the corresponding values of Pi and
1.0
1.0
1r X 60 X 0.153 v p = 4.3 v p1 X 1.56 m m
oo 0.5
Clearing timet, (seconds)
FIG. 47. Curve of stability limit as a function of clearing time, three-phase shortcircuit at the middle of one of the 132-kv. lines of the system of Fig. 43 (Example 4).
PM read from the curves of Fig. 46. In col. 4 is the value of rcltc,which by
eq, 27 is
In col. 5 is the value of Te read from the curves. In col. 6 is fe, obtained by
dividing Te from col. 5 by Tc/ tcfrom col. 4.
9. Curve oj stability limit as a Junction oj clearing time is plotted in Fig. 47.
Summary of methods of calculating transient stability. Byrd and
Pritchard's method, which has just been illustrated, is probably the
best way of finding the critical switching time corresponding to a given
transmitted power, or of finding the transient stability limit for a given
switching time, for a two-machine pure-reactance system with only one
instant of switching after inception of the fault.
If the network is not purely reactive (for example, if line resistance
or shunt loads are to be taken into account), this method is not applicable. However, the equal-area method may be used in conjunction
with pre-calculated swing curves as described on pp. 149-57 of this
chapter.
If the system has three or more machines, their swing curves must be

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 38/44
186 THE TWO-MACHINE SYSTEM
TABLE 5
RECOMMENDED METHODS OF CALCULATING TRANSIENT STABILITY OF A TwoMACHINE SYSTEM
Number of Recommended Method of Calculating
Instants of A BSwitching Examples Critical Switching Time Stability Limit Corre-or Circuit Corresponding to a sponding to a GivenChange Given Power Switching Time
Sustained fault Use equal-area crite-
1Fault cleared instantly rion or Byrd and
Switching out a sound Pritchard's methodline (steps 1 to 5).
(Pure-reactance network)
Plot part of curve by Byrd and Pritchard'smethod.
Fault cleared in finite (Linear impedance network)time by simultane-
Use equal-area method Cut and try by assum-2 ous opening of all
breakersfor finding critical ing power and pro-
switching angle, then ceeding as in A.
pre-calculated swingcurve for findingswitching time.
Fault cleared by se.,quential opening of2 breakers
3 Fault cleared by si- Dse a combination of swing curves, equal-areamultaneous opening criterion, and successive trials.of all breakers, fol-lowed by simultane-ous reclosing
calculated to a value of time when one can determine whether the sys
tem is stable for the assumed power and switching time. The pro
cedure is then repeated for different values of power or of switching
time.
If there is more than one instant of switching after inception of the
fault on a two-machine system (for instance, if a fault is cleared by
successive opening of two or more circuit breakers), it is still possibleto use the equal-area criterion as an adjunct to swing curves, making
continuation of the swing curves beyond the instant of the last switch
ing operation unnecessary. Suppose, for example, that a fault is
cleared by successive opening of two breakers at known times and that

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 39/44
CERTAIN FACTORS AFFECTING STABILITY 187
the power limit is sought. A value of power is assumed, and the swing
curve is calculated till the time of opening of the second breaker.
The equal-area criterion for stability is then used. The procedure isrepeated for other values of power until one is found which makes the
positive and negative areas equal. This value is the stability limit.
A plot of net area against power enables one to find the stability limit
by interpolation after two or three trials.
Table 5 lists the foregoing methods of calculation for two-machine
systems with recommendations concerning which to use in each of
various situations.
For estimating purposes two sets of curves which are not reproduced
here will be found useful. One of them gives, for a two-machinereactance system, curves of critical clearing time tc against sin 00 for
constant rl and r2. Four families of such curves are given, each for a
value of r l corresponding to a different type of short circuit at the
sending end of a transmission line and for several values .of r2. The
equivalent inertia constant, H = H1H2 H 1 + H2 ) , is assumed to be
1.5. If it has a different .value, the switching time read from the
curves must be multiplied by a correction factor VH/1.5.
The other set of curves gives the critical clearing time of a fault on ametropolitan power system having generators of H = 8 operating at
full load and 0.85 power factor, based on the assumption that the
generator or group of generators nearest the fault swings with respect
to the remaining generators.
Certain factors affecting stability. With a knowledge of the meth
ods ofanalyzing the stability of the two-machine system that have been
described in the preceding pages, we can proceed to draw a number of
general conclusions regarding the effect on stability of certain features
of apparatus design, system layout, and operation. The effect of eachfeature must be considered under all three conditions-before the
fault, during the fault, and after clearing the fault. Some features of
layout or design promote stability during all three conditions, whereas
others are beneficial during one condition but detrimental during
another.
In the equal-area criterion for stability, the power-angle curves for
each of the three conditions are used. (Refer to Fig. 14.) The factors
determining the relative sizes of the two compared areas Al and A 2 are
(1) the clearing angle Oc and (2) the amplitudes of the three power-angle curves, Pm, rIPm, r2Pm» relative to the height of the input
(initial power) linePi. Stability isaided by decreasing area A 1 and by
increasing area A 2 • For a given Pi this may be accomplished, from
the geometrical viewpoint, chiefly by decreasing the clearing angle Oc

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 40/44
188 THE TWO-MACHINE SYSTEM
and by increasing the amplitudes of the fault and post-fault curves,
T1Pm and T2Pm. It is also helpful to decrease the amplitude of the
pre-fault power-angle curve if such reduction is possible without at thesame time decreasing the amplitudes of the other two power-angle
curves, because so doing increases the initial angle 00- If any feature
changes the amplitudes of all three curves proportionally, however, it is
beneficial to increase rather than to decrease the amplitudes.
The clearing angle s, depends on the clearing time and on the equiv
alent inertia constant (eq. 2). The importance of rapid fault clearing,
obtainable by the use of high-speed circuit breakers and fast relaying,
has already been stressed. For a given clearing time the clearing
angle is decreased by increasing the inertia constant. If the inertiaconstants of the two machines are far from equal, the equivalent
inertia constant of the system is very nearly that of the lighter ma
chine; hence it is more effective to increase the inertia of the light
machine than of the heavy one. Seldom, however, has it proved
economical to increase the inertia of a generator beyond its normal
value. t But a consideration of the role of inertia sheds some light on
the relative critical clearing times for hydroelectric generators (average
H = 3) and steam turbogenerators (average H = 6) if the circuit
reactances are about the same. Since the time varies as the square root
of the inertia constant Ceq. 27), a fault on a hydroelectric system must
be cleared in about 70% of the critical clearing time of the correspond
ing steam system.
The amplitude of the power-angle curves is E1E2 X 12 , where E1 and
E2 are the internal voltages of the two synchronous machines and X 12
is the reactance between these voltages, which is, in general, different
for each of the three circuit conditions. Increasing the internal volt
ages increases the amplitude of all three power-angle curves and aidsstability. An increase in internal voltages usually accompanies an
increase of load on the machines, but this does not necessarily mean an
increase of the equivalent input Pi. If both generators have local
loads which are increased in the proper ratio, Pi is not affected. (See
eq.3.)
The amplitude of all the power-angle curves is increased by decreas
ing the reactance X 12 between the machines. This reactance consists
principally of the reactances of the two synchronous machines, trans
former reactance, and line reactance. A large part of it is in the machines. The transient reactance of each class of large synchronous
machines (steam turbogenerator, water-wheel generator, condenser,
etc.) has a characteristic value and does not vary much in normal
tA notable exception is the Boulder Dam station.

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 41/44
CERTAIN FACTORS AFFECTING STABILITY 189
designs. A lower value of reactance (in per unit) is obtained essentially by building a larger machine and under-rating it. This has
seldom proved an economicalway to aid stability.§ The reactances oftransformers also have, for a given size and voltage, normal values
belowwhich it is difficult to go. The reactance of an overhead trans
mission line is only slightly affected by any change of spacing or con
ductor size which is practical from other standpoints than stability.
A decrease in system frequency, of course, decreases the reactances of
all parts of the system and thereby aids stability. Therefore a fre
quency of 25 or 50 c.p.s. is preferable to 60 c.p.s. from the standpoint of
stability. Nevertheless, because of other advantages, 60 c.p.s. has
become the standard power-systemfrequency in the United States, anda transmission project operating at a lower frequency would necessarily
include frequency-changing equipment at one or both ends. This ad
ditional equipment might offset any advantage of the lower frequency
in regard to stability. Up to the present time the stability limitations
of 60-c.p.s. systems have not been serious enough to warrant lower
frequencies. Series capacitors have been used on some transmission
lines to partially compensate for the inductive reactance of the lines.
However, they have not been used on any major project where stability
was an important factor, although they have been seriously considered.6,7,g
The most important means of reducing the reactance are (1) to
connect more lines in parallel and (2) to raise the transmission volt
ages.The ratio r l of the amplitude of the fault power-angle curve to the
amplitude of the pre-fault power-angle curve depends upon the type
and location of the fault. The effect of the type of fault will be dis
cussed in Chapter VI. The effect of location will be considered
briefly now. A fault on a bus or on a line close to a bus is more severe
than a fault of the same type near the middle of a line. Most severe
of all is a three-phase short circuit at some point (for example, fault b
in Fig. 15) where it entirely blocks the transfer of power from one
generator to the other; then r l = o. Although a fault near the end
of a line and one near the middle of the line are equally probable, the
most severe location is usually assumed in a stability study so that the
results will be conservative.
The ratio T2 of the amplitude of the post-fault curve to the amplitudeof the pre-fault curve depends on the number and location of lines
which are opened to clear the fault; therefore it depends upon the
fault location and upon the relaying scheme. The most favorable
§Again the Boulder Dam station is a notable exception.

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 42/44
190 THE TWO-MACHINE SYSTEM
value of T2 encountered in practice is 1. This value applies to a fault
on an unloaded radial feeder cleared by disconnection of the feeder.
It is also attained with quick-reclosing schemes which restore thefaulted line to service after a brief time to allow for extinction of the
arc. II A fault on a bus, although electrically equivalent before clearing
to a fault on a line adjacent to a bus, is more severe in its effects after
clearing than a line fault is because several lines must be opened to
clear it. Sometimes a comparative study is made between a small
number of high-voltage lines and a large number of low-voltage lines
having the same parallel reactance in per unit. The large number of
lines is preferable to the small number from the standpoint of stability,
because to clear a fault requires the opening of one line in either case,
24
24
16
J
16 16
FIG. 48.System forwhichthe effectof high-voltagebussingis considered in Prob, 4.
but one line is a small fraction of the entire number of lines when thisnumber is great. For other reasons, however, a smaller number oflines may be preferable.
When two or more parallel lines are used, the number of intermediatebusses is a factor affecting stability. For example, in the system ofFig. 48 it is worth inquiring whether the addition of the two high-voltage busses shown in broken lines is beneficial or detrimental. If the
high-voltage busses and circuit breakers are provided, a line fault can
be cleared by switching out one line while leaving all the transformersconnected, whereas, without the high-voltage busses, the transformers
would be switched out with the line. Thus the busses increase the
value of T2 and are beneficial after clearing of the fault. On the other
hand, during the fault the shock to the system is increased by the
busses; that is, Tt is lessened. Which effect predominates depends
upon the speed of clearing. With fast clearing the busses are benefi
cial; with slow clearing they are detrimental.
The same principle may determine, although less obviously, the
effectupon stability of changes of layout inmore complicated networks.
The effect of a given change may be either beneficial or detrimental,
depending upon the speed of fault clearing. Needless to say,_ many
USee Chapter XI, Vol. II.

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 43/44
PROBLEMS 191
contemplated changes of connections are conceived from other motivesthan the improvement of stability. They may be intended, for
example, to improve voltage regulation, to increase the reliability ofsupply to certain loads, or to relieve overloading of certain lines.
Nevertheless the effect of such changes on stability conditions should
be considered.Most of the conclusionswhich have been drawn from a study of the
two-machine system apply equally well to a multimachine system.
When a muItimachine system is unstable, as a rule, it is split into two
groups of machines whichgoout of synchronism with each other, while
the machines within each group stay in synchronism. The grouping
may differ with the fault location. Still, for a given fault location,the general behavior of the multimachine system is similar to that of a
two-machine system. It could be analyzed as a two-machine system
except that the machines within a group may swing so far with respect
to each other (yet without goingout of step) as to have a marked effect
on the relations between the two groups. In addition, the grouping
for a given fault location is not always apparent in advance.
REFERENCES
1. R. H. PARK and E. H. BANCKER, System Stability as a Design Problem,
A.l.E.E. Trans., vol. 48, pp. 170-93, January, 1929.
2. I. H. SUMMERS and J. B. MCCLURE, Progress in the Study of System Stabil
ity, A.I.E.E. Trans., vol. 49, pp. 132-58, January, 1930.
3. H. L. BYRD and S. R. PRITCHARD, JR., Solution of the Two-Machine
Stability Problem, Gen. Elec. Rev.,vol. 36, pp. 81-93, February, 1933.
4. R. D. EVANS and W. A. LEWIS, Selecting Breaker Speeds for Stable Opera
tion, Elec. Wid., vol. 95, pp. 336-40, Feb. 15, 1930.
5. S. B. GRISCOM, W. A. LEWIS, and W. R. ELLIS, Generalized Stability Solu
tion for Metropolitan Type Systems, A.I.E.E. Trans., vol. 51, pp, 363-72, June,
1932; disc., pp. 373-4.6. E. C. STARR and R. D. EVANS, Series Capacitors for Transmission Circuits,
A. I. E. E. Trans., vol. 61, pp. 963-73, 1942; disc., pp. 1044-6.
7. R. B. BODINE, C. CONCORDIA, and GABRIEL KRON, Self-Excited Oscillations
of Capacitor-Compensated Long-Distance Transmission Lines, A.I.E.E. Trans.,
vol. 62, pp, 41-4, January, 1943; disc., pp. 371-2.
8. J. W. BUTLER, J. E. PAUL, and T. ·W. SCHROEDER, Steady-State and Tran
sient-Stability Analysis of Series Capacitors in Long Transmission Lines, A.I.E.E.
Trans., vol. 62, pp. 58-65, February, 1943; disc., pp. 377-80.
PROBLEMS ON CHAPTER V
1. Check the results of Example 3, part a, by Byrd and Pritchard's
method.
2. Work Example 4 for a three-phase fault on a 132-kv. line near thehydroelectric-station high-voltage bus.

8/13/2019 V1-5-5264202
http://slidepdf.com/reader/full/v1-5-5264202 44/44
192 THE TWO-MACHINE SYSTEM
3. WorkExample 4, assuming that the voltages behind transient reactanceare independent of the initial power transmitted.
4. Find the effect of high-voltage bussing on the stability of the 6o-cyclesystem shown in Fig, 48 (consisting of a generator G1 feeding over a double
circuit high-voltage line to the infinite bus G2) by plotting stability limit in
per unit against fault duration in seconds for a three-phase fault at the sending end of one circuit (a) with no high-voltage bussing and (b) with high
voltage bussing at both ends, as indicated by the broken lines. The re
actances of the circuit elements are given in per cent based on the rating of
G1. Assume that the voltage of the infinite bus and the sending-end
voltage of the high-voltage lines are 1.00 per unit for all values of initial
power. Explain why the curves cross.
5. Find the effect of fault location on the system of Fig. 48 with high
voltage bussing, by plotting stability limit in per unit as a function of fault
location as the three-phase fault moves from the sending end to the receiving
end of the line. The clearing time is constant at 0.15 sec.