Embed Size (px)
Citation preview

The system combines video, NDT probes and any oth-er Ethernet-cabled instruments. Moorings anchored to the seafloor support the buoy for long-term deployments. Most recently, WorleyParsons has been investigating drill support and defense applications where the device is tethered to the land or the mother ship.
As a result of 36 months of development in Perth, Aus-tralia, and field trials, both at the Australian Maritime Com-
plex in Henderson, Australia, and offshore Port Hedland, Austra-lia, WorleyParsons now delivers more accurate and reliable data than data obtained with divers, at an increased frequency and on de-mand. The accuracy and regularity of these data provide a basis for more informed project decisions, and maxi-mize productivity and schedule integrity by
Citizens, sailors and scientists have observed the seas for centuries—first from the shore, then from ships and sub-
mersibles, and more recently from satellites. Along the way, scientists and engineers learned that sometimes they could leave instruments in the ocean, secured by wires, buoys, weights and floats. Each new attempt has advanced our un-derstanding of the ocean system and its interaction with the rest of the planet.
The next big leap will take the form of ocean observato-ries. These will house suites of instruments and sensors with long-term power supplies and permanent communications links that can feed data to scientific laboratories in real time.
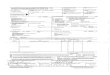
One such tool taking that big leap is the Unmanned Subsea Surveyor (USS), a hybrid ROV/AUV developed by WorleyParsons (Sydney, Australia). It completed sea trials in December 2013, and the company has begun taking orders for its subsea robot. This achievement puts WorleyParsons in a position to remotely inspect subsea assets or the subsea environment with precision repeatability for up to a year, all executed from the office. A system of high-tech sensors with precision accuracy enables real-time monitoring and data gathering from the ocean floor, and has numerous ap-plications, including permanent subsea inspection, marine sciences, defense and subsea mining.
Unmanned Subsea SurveyorThe core innovation enabling the USS to
provide a superior monitoring outcome re-lates to technology that allows a remote user to capture a variety of images (or other pe-ripherals) in a subsea environment. The USS extends 10 meters from the base and rotates 360°, covering 300 square meters with re-peated precision between surveys. The USS can be completely piloted over the Internet in real time, giving scientists, students, edu-cators and policy makers better data on the state of the ocean at the sites being surveyed. The USS could lead to potential discoveries or collaboration between many different disciplines in the study of the ocean.
Subsea Robot for Ocean Observation Or Asset Inspection ServiceUSS Hybrid ROV/AUV Enables Remote MonitoringBy Peter Mellor
(Top) The Unmanned Subsea Surveyor being deployed off Perth, Aus-tralia. (Bottom) The USS range of motion.
Reprinted from Sea Technology magazine. For more information about the magazine, visit www.sea-technology.com©Copyright 2014 by Compass Publications Inc. Sea Technology (ISSN 0093-3651) is published monthly by Compass Publications Inc., Suite 1010, 1600 Wilson Blvd.
Arlington, VA 22209; (703) 524-3136; [email protected].

All cables subsea are isolated and wet mateable. When the camera system is not in use, it retracts into a UV-light docking station with a combination of remotely controlled wipers to eliminate biofouling.
Results from sea trials have indicated all degrees of freedom. The USS extends 10 meters from the base, 12.1 meters high from the horizon and 5.4 meters be-low the horizon. Repeatability and accuracy for auto-matic surveys (as opposed to manually driving) showed the robot navigated to expected position. Error accura-cies are as follows: slew +/- 0.26°; lift +/- 0.46°; luff +/- 0.46°; and reach +/- 30 millimeters. The USS fed live high-definition video and stills of known targets for later analysis.
ConclusionIn the past, industrial robots
were used extensively in manu-facturing and construction, such as in the steel and automobile industries, and, thus, industry was the main focus of research development. However, to im-prove quality of life in a range of settings, research institutions and private industry, including the marine sector, have recently
begun to focus on designing and producing service robots. WorleyParsons has successfully developed a hybrid
ROV/AUV that can maintain long-term deployments in the marine environment and feed real-time video and other in-formation from its peripherals. At present, WorleyParsons is the manufacturer, operator and service provider, although it has approached other potential partners.
The development and installation of underwater observa-tories benefits many research areas in the marine sciences, as well as projects for technological innovation, but this is the first system that can capture measurements repeatedly and accurately over a large spatial area (i.e., millimeter ac-curacy over a 300-square-meter area). Internationally, gov-ernments have proposed different initiatives, such as the NEPTUNE cabled observatory from the United States/Can-ada, the VENUS from Canada, the ARENA cabled network from Japan, the ALOHA cabled observatory for Hawaii and the ESONET network of excellence promoted by the Euro-pean Union (FP6—2005-Global.4—ESONET 036851—2 European Seas Observatory NETwork).
Among all the different research areas related to underwa-ter observatories, one of the most active is subsea optics and object viewing/imaging, as developed in the USS. Thus, the USS has applications for the environmental, dredging, asset inspection, government, oil and gas and defense sectors. n
expediting data analysis and sub-sequent reporting.
Extension and retraction of the boom is driven by a complex ar-ray of guidelines, which are con-trolled by hydraulic pumps. Similarly, hydraulic pumps con-trol the slew, lift and luff of the robot. This hydraulic system is over an electric system that the buoy powers from the
surface.The buoy can be deployed in the
ocean to support ocean observato-ries or other subsea equipment with a large power load. The buoy’s stan-dard umbilical provides fiber-optic and 240 volts to the seabed and te-lemetry to the shore. Data can be
downloaded remotely anywhere in the world. Using built-in PLCs, the buoy wakes at set times and starts a marine-grade generator. The generator provides 120 to 240 volts at 4.8 kilowatts (con-tinuous) to the seabed. The generator works to an angle of 45° incline. An in-built velocimeter prevents it from start-ing in rough sea states. Fuel within the buoy has 250-liter diesel capacity that is triple bunded.
The USS currently relies on hybrid cables for electricity and opti-cal communications as well as retrieval and de-ployment, having triple armoring and a 44-kilo-newton breaking load.
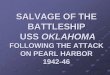
(Top) USS software showing way-points for repetitive coral surveys for marine construction monitor-ing. (Right) The USS undertaking a terrestrial inspection at almost full extension.
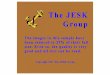
(Top) The USS undertaking re-mote conspicuous CCTV inspec-tions. (Bottom) The topside buoy for the USS (note the skid being lowered into the buoy).
Peter Mellor is the manager of ports, marine terminals and marine sciences within WorleyParsons’s Perth, Australia, office and is a Ph.D. candidate. He has led field teams and project delivery for more than 300 million cubic meters of dredging. He leads technol-ogy development of diverless solutions at WorleyPar-sons for a range of private and public sector clients. Industry areas serviced include quarrying and min-ing, petroleum and gas, water supply and treatment, transport, defense and government authorities.