Embed Size (px)
Citation preview

d
er curveKimit
n.an
re its
Aidednvokes1995;hance,blished.iform
/CAMn
Computer Aided Geometric Design 20 (2003) 423–434www.elsevier.com/locate/cag
Using Jacobi polynomials for degree reductionof Bézier curves withCk-constraints
Young Joon Ahn
Department of Mathematics Education, Chosun University, Gwangju, 501-449, South Korea
Received 19 June 2002; received in revised form 26 May 2003; accepted 26 May 2003
Abstract
We propose the constrained Jacobi polynomial as an error function of good degree reduction of Béziwith Ck-constraints at the boundaries,k = 2,3. The result is a natural extension of the method proposed byand Ahn (2000). The bestCk-constrained degree reduction inL∞-norm,k > 0, cannot be obtained in explicform and requires higher computational complexity such as Remes algorithm. The method ofCk-constraineddegree reduction using the constrained Jacobi polynomials is represented in explicit form, and itsL∞-norm erroris obtainable using Newton method and is slightly larger than that of the bestCk-constrained degree reductioWe also present the subdivision scheme for theCk-constrained degree reduction within given tolerance. Asillustration, our method is applied toCk-constrained degree reduction of planar Bézier curve, and comparesult to that of the bestCk-constrained degree reduction. 2003 Elsevier B.V. All rights reserved.
Keywords:Degree reduction; Jacobi polynomial;Ck-continuity;L∞-norm; Chebyshev polynomial
1. Introduction
Degree reduction of Bézier curves is one of the important problems in CAGD (ComputerGeometric Design) or CAD/CAM. In general, degree reduction cannot be done exactly so that it iapproximation problems. Thus in recent twenty years, many works (Ahn, 2002; Bogaki et al.,Brunnett et al., 1996; Cheney, 1982; Eck, 1993, 1995; Kim and Ahn, 2000; Lachance, 1988; Lac1991; Watkins and Worsey, 1988) relevant to the degree reduction of Bézier curves have been pu
It is well known (Lachance, 1988) that the error function of the best degree reduction in un(L∞) norm is a constant multiple of the Chebyshev polynomial. But, in many cases of actual CADsystems, it is required that the approximate curve is continuous of orderk � 0, and thus degree reductio
E-mail address:[email protected] (Y.J. Ahn).
0167-8396/$ – see front matter 2003 Elsevier B.V. All rights reserved.doi:10.1016/S0167-8396(03)00082-7

424 Y.J. Ahn / Computer Aided Geometric Design 20 (2003) 423–434
rderv
nomials,Watson,the
ainablein (Kim
ure error
e
uction
iersin the
ree eightreducednce. In
t
75;
of Bézier curve is required to haveCk-constraints at both end points (Bogaki et al., 1995). Thus in oto obtain the best degree reduction of Bézier curve withCk-constraints, theCk-constrained Chebyshepolynomial (Kim and Ahn, 2000; Lachance, 1988, 1991) is needed. In case ofC0-constraints, theconstrained Chebyshev polynomials can be expressed in terms of the classical Chebyshev polybut the other cases can be obtained numerically using modified Remes algorithm (Cheney, 1982;1980). Recently, Kim and Ahn (2000) proposed aC1-constrained degree reduction method usingconstrained Jacobi polynomials. Their method presents the error bounds in explicit form or obtusing Newton method without the modified Remes algorithm. In this paper we extend the methodand Ahn, 2000) to the cases ofCk-constraints,k = 2 or 3, using the constrained Jacobi polynomials. Omethod of degree reduction gives the explicit form of the constrained Jacobi polynomials and thbounds obtainable using Newton method. We also present a subdivision scheme for theCk-constraineddegree reduction within the tolerance. As an example, we apply our method to theCk-constrained degrereduction of a planar Bézier curve and compare the numerical result to that of the bestCk-constraineddegree reduction method.
The outline of this paper is as follows. In Section 2, we propose our method of degree redusing the constrained Jacobi polynomials withCk-continuity, k = 2,3, and we compare theL∞-normsto those of the best degree reduction withCk-constraints. Also, we present the explicit form of the Bézcoefficients of the constrained Jacobi polynomials withCk-continuity,k = 2,3, so that the polynomialagree with CAD/CAM systems, and give the subdivision scheme for the degree reduction withtolerance. In Section 3, we apply our method to reduce the degree of a planar Bézier curve of degand compare its result to that of the best degree reduction by plotting the graphs of the degree-Bézier curves, and achieve the degree reduction using subdivision within the given error toleraSection 4, we give some properties for the constrained Jacobi polynomials so that we find theL∞-normof the constrained Jacobi polynomial withCk-continuity.
2. Degree reduction with Ck-constraint
In this section, we introduce our method of degree reduction of Bézier curves withCk-constraints aboth end points. First, We define the constrained Jacobi polynomial withCk-continuityJ k
n (t), t ∈ [0,1],which is used as an error function for our method ofCk-constrained degree reduction.
Definition 2.1. We define theconstrained Jacobi polynomial withCk-continuityJ kn (t) by
J kn (t)= tk+1(t − 1)k+1P
(2k+1,2k+1)n−2k−2 (2t − 1)( 2n−2
n−2k−2
) , t ∈ [0,1], (1)
for k � 1 andn� 2k+ 2, whereP (α,α)m (x) is the Jacobi polynomial defined (Chihara, 1978; Davis, 19
Szego, 1975) by
P (α,α)m (x)=
m∑i=0
(m+ α
i
)(m+ α
m− i
)(x − 1
2
)i(x + 1
2
)m−i, x ∈ [−1,1], (2)
which is also called Gegenbauer or ultraspherical polynomial.

Y.J. Ahn / Computer Aided Geometric Design 20 (2003) 423–434 425
obi
,
ined
s to
dchy
obi
The constrained Jacobi polynomial withCk-continuityJ kn (t) is the extension of the constrained Jac
polynomial withC1-continuity Jn(t) defined by Kim and Ahn (2000) for all positive integersk. Sincethe leading coefficient ofP (2k+1,2k+1)
m (x) is 2−m(2m+4k+2m
)for degreem (refer to Eq. (4.21.6) in (Chihara
1978)),J kn (t) is a monic polynomial of degreen. The following theorem yields theL∞-norm ofJ k
n (t)
for k = 2 or 3, and for each degreen. We prove the theorem using some properties of the constraJacobi polynomials in Section 4.
Theorem 2.2. Let J kn (t) be the constrained Jacobi polynomial withCk-continuity, k = 2,3. Then its
L∞-norm on[0,1] is given by
∥∥J kn (·)
∥∥L∞[0,1] =
max{|J kn (τ1/2)|, |J k
n (τ1)|} if n is odd,
max
{ (n−1
n/2−k−1
)2n
( 2n−2n−2k−2
) , |J kn (τ1)|
}if n is even,
(3)
whereτ1/2 andτ1 are the closest zero ofddt Jkn (t) less than1/2 and1, respectively.
Note that Theorem 2.2 is also true fork = 1, which can be simplified as follows
∥∥J 1n (·)
∥∥L∞[0,1] =
|J 1n (τ1/2)| if n is odd,(n−1n/2−2
)2n
(2n−2n−4
) if n is even,(4)
by Kim and Ahn (2000). Althoughτ1/2 andτ1 are not explicitly presented, Theorem 2.2 enables ufind theL∞-norm ofJ k
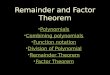
n (t) by Newton method for all degreen and fork = 2,3. As shown in Fig. 1, weplot the curvesJ k
n (t)/δkn, for 2k + 2� n� 2k + 8 and fork = 2,3, where
δkn =(
n−1n/2−k−1
)2n
( 2n−2n−2k−2
) .By the Stirling’s formula, the asymptotic behavior ofδkn, k � 0, is
δkn ∼ 2√
2
22n
asn approaches to∞. As shown in Table 1, we compare theL∞-norm ofJ kn (t) to that of the constraine
Chebyshev polynomialsT kn (t) of leading coefficient one withCk-constraints at both end points, whi
are the monic polynomials having minimalL∞-norm on [0,1] withCk-constraint, and are obtained bRemes algorithm (Lachance, 1991).
Now, we present our method of degree reduction withCk-constraints using the constrained Jacpolynomial withCk-continuityJ k
n (t).
Proposition 2.3. Let f (t) = ∑ni=0 biB
ni (t) be the given Bézier curve of degreen having Bézier
coefficients(or control points) bi , where thenth degree Bernstein polynomialBni (t) is given byBn
i (t) :=(n
i
)t i (1− t)n−i . Then the Bézier curvef k(t) of degree(less than or equal to) n− 1 given by
f k(t) := f (t)−�nb0Jkn (t) (5)

426 Y.J. Ahn / Computer Aided Geometric Design 20 (2003) 423–434
(a)
(b)
Fig. 1. The constrained Jacobi polynomials with (a)C2-continuityJ2n (t)/δ
2n, 6� n� 12 and with (b)C3-continuityJ3
n (t)/δ3n,
8 � n� 14. They are plotted by dash lines for odd degreen and by solid lines for evenn.
is aCk interpolation off (t) at both end points, and its error inL∞-norm is
∥∥f (·)− f k(·)∥∥L∞[0,1] =
∣∣�nb0
∣∣ ∥∥J kn (·)
∥∥L∞[0,1] (6)
where thenth forward difference�nb0 = ∑ni=0(−1)i
(n
i
)bn−i is the leading coefficient off (t).

Y.J. Ahn / Computer Aided Geometric Design 20 (2003) 423–434 427
) is
cobilate
Table 1L∞ error-norms of the best degree reduction withCk -continuityT kn (t) obtained by Remes algorithm and our methodJ kn (t) obtainedby Newton method fork = 2,3
(a) k = 2
Degreen Best‖T 2n (·)‖L∞[0,1] ‖J2
n (·)‖L∞[0,1]6 1.5625× 10−2 1.5625× 10−2
7 1.85952× 10−3 1.85952× 10−3
8 2.99454× 10−4 3.00481× 10−4
9 5.52009× 10−5 5.6170× 10−5
10 1.09928× 10−5 1.1489× 10−5
11 2.30061× 10−6 2.43769× 10−6
12 4.98286× 10−7 5.39895× 10−7
13 1.10645× 10−7 1.2129× 10−7
14 2.50336× 10−8 2.79337× 10−8
15 5.74666× 10−9 6.28286× 10−9
16 1.33444× 10−9 1.52512× 10−9
17 3.12756× 10−10 3.60344× 10−10
18 7.38605× 10−11 8.60953× 10−11
19 1.75533× 10−11 2.06004× 10−11
20 4.19379× 10−12 4.96959× 10−12
(b) k = 3
Degreen Best‖T 3n (·)‖L∞[0,1] ‖J3
n (·)‖L∞[0,1]8 3.90625× 10−3 3.90625× 10−3
9 4.06442× 10−4 4.06442× 10−4
10 5.86836× 10−5 5.90807× 10−5
11 9.87724× 10−6 9.93486× 10−6
12 1.82099× 10−6 1.83564× 10−6
13 3.56651× 10−7 3.64105× 10−7
14 7.29175× 10−8 7.58201× 10−8
15 1.53916× 10−8 1.61905× 10−8
16 3.32957× 10−9 3.5586× 10−9
17 7.34334× 10−10 7.92823× 10−10
18 1.64499× 10−10 1.80017× 10−10
19 3.73224× 10−11 4.12024× 10−11
20 8.55806× 10−12 9.55691× 10−12
Proof. Since bothnth degree polynomialsf (t) and�nb0Jkn (t) have the same leading coefficient,f k(t)
is of degree less than or equal ton−1. Sinceith order derivativedi
dt i Jkn (t)= 0 att = 0,1, for i = 0, . . . , k,
f k(t) is theCk interpolation off (t) at both end points (refer to (Farin, 1993)). The error in Eq. (6easily obtained from Theorem 2.2.✷
The following proposition gives the explicit form of the control points of the constrained Japolynomials withCk-continuity J k
n (t) in Bézier form, which is very simple and is needed to calcuf k(t) as a Bézier curve or a segment of spline in CAD/CAM systems.

428 Y.J. Ahn / Computer Aided Geometric Design 20 (2003) 423–434
erance.e
Proposition 2.4. For all k � 1 and alln� 2k+ 2, the constrained Jacobi polynomial withCk-continuityJ kn (t) in Bézier form is given by
J kn (t)=
n∑i=0
ciBni (t),
where
ci ={
0 if i = 0, . . . , k, n− k, . . . , n,
(−1)n−i(n−1i−k−1
)(n−1
n−k−i−1
)/(n
i
)otherwise.
Proof. By substitutioni by m− i andx = 2t − 1 in Eq. (2) we have
P (2k+1,2k+1)m (2t − 1)=
m∑i=0
(−1)m−i(m+2k+1
i
)(m+2k+1m−i
)(m
i
) Bmi (t).
Using Eq. (1) and
tk+1(1− t)k+1m∑i=0
viBmi (t)=
m+k+1∑i=k+1
(m
i−k−1
)(m+2k+2
i
)vi−k−1Bm+2k+2i (t),
we get
J kn (t)=
n−k−1∑i=k+1
(−1)n−i(n−1i−k−1
)(n−1
n−k−i−1
)(n
i
) Bni (t),
and the assertion follows.✷In the following proposition we represent the degree-reduced polynomialf k(t) from f (t) by our
method in Bézier form:
f k(t)=n−1∑i=0
bki Bn−1i (t) (7)
wherebki , i = 0, . . . , n− 1, are the Bézier coefficients off k(t) having degreen− 1.
Proposition 2.5. Letf (t)= ∑ni=0 biB
ni (t) be the given Bézier curve of degreen. Then theCk-constrained
degree-reduced Bézier curvef k(t) has the control pointsbki given by
bki ={b0 −�nb0 c0 if i = 0,n
n−i (bi −�nb0 ci − inbi−1) if i = 1, . . . , n− 1,
(8)
recursively, whereci, i = 0, . . . , n, are the control points ofJ kn (t).
Proof. See (Kim and Ahn, 2000). ✷In practical application, for given tolerance it is needed to subdivide the Bézier curvef (t) into K
pieces which can be piece-wisely approximated by Bézier curves of lower degree within the tolIn the following proposition, we show how many the Bézier curvef (t) should be subdivided so that thCk-constrained degree reduction by our method is achieved within the tolerance.

Y.J. Ahn / Computer Aided Geometric Design 20 (2003) 423–434 429
∑d
ght. Let
ith
3572),e
d
Proposition 2.6. For the given toleranceε, the Bézier curvef (t) = ni=0biB
ni (t) must be subdivide
intoK segments so that each degree reduction has theL∞ error less thanε,
K =⌈( |�nb0| ‖J k
n (·)‖L∞ε
)1/n⌉(9)
where�x� denotes the smallest integer greater thanx, and‖J kn (·)‖L∞ is obtainable in Theorem2.2.
Proof. Since each subdivided segmentf jn (t) = f (t/K + j/K), j = 0, . . . ,K − 1, has the leading
coefficient(1/K)n�nb0, theL∞-norm error for the degree reduction of each segment is equal to
(1/K)n∣∣�nb0
∣∣∥∥J kn (·)
∥∥L∞[0,1].
Thus in order to satisfy that theL∞-norm error is less thanε, K holds Eq. (9). ✷
3. Example
In this section, we apply our method to reduce the degree of a planar Bézier curve of degree eithe planar Bézier curve (refer to (Eck, 1993)) be given by
f (t)=8∑i=0
biB8i (t),
wherebi ’s are(0,0), (3.6,1), (6,10), (7.2,−5), (13.2,5), (13.2,−5), (21,10), (19.2,0), (24,−1), inorder, as shown in Fig. 2. The degree reduction method by the constrained Jacobi polynomial wC2-continuityJ 2
8 (t) yields the approximate Bézier curvef (t) of degree seven,
f (t)= f (t)−�8b0J28 (t)=
7∑i=0
biB7i (t),
where�8b0 = (379.2,1461) and bi ’s are (0,0), (4.11429,1.14286), (6.62857,12.9524), (10.0431,−6.13846), (10.5231,−6.33846), (21.8286,13.2857), (18.5143,0.142857), (24,−1), in order. TheL∞error bound for the degree reduction is given by∥∥f (·)− f (·)∥∥
L∞[0,1] �∣∣(379.2,1461)
∣∣∥∥J 28 (·)
∥∥L∞[0,1] ≈ 0.4535.
On the other hand, the best degree reduction by theC2-constrained Chebyshev polynomial yields
f best(t)= f (t)− (379.2,1461)T 28 (t)=
7∑i=0
viB7i (t),
wherevi ’s are (0, 0), (4.11429, 1.14286), (6.62857, 12.9524), (10.0438, –6.13572), (10.5238, –6.3(21.8286, 13.2857), (18.5143, 0.142857), (24, –1), in order. TheL∞ error bound for the best degrereduction is∥∥f (·)− fbest(·)
∥∥L∞[0,1] �
∣∣(379.2,1461)∣∣∥∥T 2
8 (·)∥∥L∞[0,1] ≈ 0.4520.
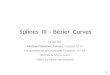
We compare the graph of our degree reductionf (t) to that off best(t) by plotting the Bézier curves antheir control points in Fig. 2.

430 Y.J. Ahn / Computer Aided Geometric Design 20 (2003) 423–434
y. The
ntrol points
Fig. 2. The bestC2-constrained degree reductionT 28 (t) and our methodJ2
8 (t): The given Bézier curvef (t), best degree
reductionf best(t), and our methodf (t) are plotted by solid lines, dash lines with crosses and dash lines, respectivelboxes, triangles, and circles are the control points of each Bézier curve, in the order.
Fig. 3.C2-constrained degree reduction using subdivision scheme: The degree reductions using our methodJ28 (t) for first and
second segment are plotted by dash lines and dash lines with crosses, respectively. The circles and boxes are the coof the degree reduction for each subdivision Bézier segment, in the order.
Let the error toleranceε be given by 0.01. By Proposition 2.6, the curvef (t) must be subdivided intotwo pieces because of
K =⌈(
0.4535
0.01
)1/8⌉≈ �1.61� = 2.
By subdividingf (t) at t = 1/2 into two Bézier segments as shown in Fig. 3, theL∞ error is given by
1
28× ∣∣(379.2,1461)
∣∣ × 3.00481× 10−4 ≈ 0.001774< 0.01,
and the degree reduction withC2-constraints is achieved within the tolerance.

Y.J. Ahn / Computer Aided Geometric Design 20 (2003) 423–434 431
7.31.1
g
in
4. Constrained Jacobi polynomials
In this section, we present some properties of the constrained Jacobi polynomials withCk-continuity,which are needed to prove Theorem 2.2. The following theorem is well-known. (Refer to Theoremin (Szego, 1975).)
Theorem 4.1. Lety(x) be a nontrivial solution of the differential equation
y′′ + φ(x)y = 0,
whereφ is a positive function having a continuous derivative of a constant sign inx0 < x < X0. Thenthe successive relative maxima of|y|, asx increases fromx0 to X0, form an increasing or a decreasinsequence according asφ(x) decreases or increases.
We define the polynomial of degreem+ 2k + 2 as follows
ukm(x) := (1− x)k+1(1+ x)k+1P (2k+1,2k+1)m (x),
which satisfies the differential equationu′′ + φkm(x)u= 0, where
φkm(x)= m2 + (4k + 3)m+ 2(k + 1)2
1− x2− k2 + k
(1− x)2− k2 + k
(1+ x)2(10)
by Eq. (4.24.1) in (Szego, 1975). We give a property for the functionφkm(x) in the next lemma.
Lemma 4.2. For k = 2,3 and m � 3, φkm(x) is positive and has continuous positive derivative0< x < νkm, where
νkm :=√m2 + (4k + 3)m− 2(k + 1)(2k − 1)
m2 + (4k + 3)m+ 2(k + 1)(2k + 1)< 1. (11)
Proof. Fork = 2,3 andm� 3, νkm is well defined, since
m2 + (4k + 3)m− 2(k + 1)(2k − 1)� −4k2 + 10k + 20> 0.
Eq. (10) yields that
φkm(x)= (m2 + (4k + 3)m+ 2(k + 1))− (m2 + (4k + 3)m+ 2(k + 1)(2k + 1))x2
(1− x2)2,
and thatφkm(x) > 0 for 0< x < νkm <
√m2+(4k+3)m+2(k+1)
m2+(4k+3)m+2(k+1)(2k+1). It follows from
dφkm(x)
dx= 2x
(1− x2)3
{(m2 + (4k + 3)m− 2(k + 1)(2k − 1)
)− (
m2 + (4k + 3)m+ 2(k + 1)(2k + 1))x2}
thatφkm′(x) > 0 for 0< x < νkm. Thus the assertion follows.✷
Since the Jacobi polynomialP (2k+1,2k+1)m (x) has only distinct real zeros in the interval(−1,1), the
polynomialukm′(x) of degreem+ 2k+ 1 hasm+ 1 zeros in(−1,1) and 2k zeros at±1. In the following

432 Y.J. Ahn / Computer Aided Geometric Design 20 (2003) 423–434
at
s
lemma, we prove that at most one local extremum ofukm(x) lies in the open interval(νkm,1) for k = 2,3andm� 3.
Lemma 4.3. Letµi , i = 1, . . . ,m+ 1, be the zeros ofukm′(x) satisfying
−1<µm+1 < · · ·<µ2 <µ1 < 1.
Thenµ2 < νkm for k = 2,3 andm� 3.
Proof. Let xi , i = 1, . . . ,m, andξi, i = 1, . . . ,m− 1, be zeros ofP (2k+1,2k+1)m (x) andP (2k+1,2k+1)
m
′(x)
satisfying
−1< xm < ξm−1 < · · ·< x2 < ξ1 < x1 < 1.
It is clear thatµ2 < x1 < µ1 < 1, as shown in Fig. 4. Since both polynomialsP (2k+1,2k+1)m (x) and
(1 − x2)k+1 are of sign unchanged in(ξ1, x1) and their absolutes are monotone decreasing in(ξ1, x1),ukm(x) does not have any local extremum in(ξ1, x1), and thusµ2 < ξ1. Hence we have
µ2 < ξ1 < x1 <µ1 < 1.
It suffices to show thatξ1 < νkm. Let f (x) := P (2k+1,2k+1)m
′(x). Note (Eq. (4.21.7) in (Szego, 1975)) th
f (x)= m+4k+32 P
(2k+2,2k+2)m−1 (x) and it satisfies the differential equation(
1− x2)f ′′ − (4k + 6)xf ′ + (m− 1)(m+ 4k + 4)f = 0, (12)
by Eq. (4.2.1) in (Szego, 1975). Since the polynomialf (x) of degreem− 1 has only distinct real zeroandξ1 is the largest zero off (x), f (x) holds
3(m− 3)f ′′(ξ1)2 − 4(m− 2)f ′(ξ1)f
(3)(ξ1)� 0, (13)
by Eq. (6.2.16) in (Szego, 1975). From Eq. (12), we have(1− ξ2
1
)f ′′(ξ1)− (4k + 6)ξ1f
′(ξ1)= 0(1− ξ2
1
)f (3)(ξ1)− (4k + 8)ξ1f
′′(ξ1)+ (m− 2)(m+ 4k + 5)f ′(ξ1)= 0,
Fig. 4.x2 <µ2 < ξ1 < x1 <µ1 < 1.

Y.J. Ahn / Computer Aided Geometric Design 20 (2003) 423–434 433
d
ne
or equivalently
f ′′(ξ1)= (4k + 6)ξ1
(1− ξ21 )
f ′(ξ1),
f (3)(ξ1)= (4k + 8)(4k + 6)ξ21 − (1− ξ2
1)(m− 2)(m+ 4k + 5)
(1− ξ21)
2f ′(ξ1).
(14)
By substituting Eqs. (14) into (13), we have
−4(m+ 2k + 1)(m2 + 2km+ 2k + 5
)ξ2
1 + 4(m− 2)2(m+ 4k + 5)� 0,
or equivalently
ξ1 � (m− 2)√m+ 4k + 5√
(m+ 2k + 1)(m2 + 2km+ 2k + 5)=: ξ ∗. (15)
Eqs. (11) and (15) yields
νkm2 − ξ ∗2 = gkm
(1+ 2k +m)(2+ 2k +m)(5+ 2k + 2km+m2),
where
gkm = (−4k2 + 12k + 21)m2 + (
27+ 78k + 36k2 − 8k3)m+ (−30− 78k − 56k2 − 8k3
).
By simple calculations, we have
g2m = 29m2 + 263m− 474 and g3
m = 3(7m2 + 123m− 328
),
which are positive form� 3, and thus
µ2 < ξ1 < ξ ∗ < νkm
for k = 2,3 andm� 3. Hence the assertion follows.✷For higher integerk � 4, we cannot guarantee thatgkm, m � 3, is positive. Using the lemmas an
theorem above, we present the upper bound of the constrained Jacobi polynomials withCk-continuity on[−1,1].Lemma 4.4. For k = 2,3 andm� 1, theL∞-norm ofukm(x) on [−1,1] is given by
∥∥ukm(·)∥∥L∞[−1,1] ={
max{|ukm(µ0)|, |ukm(µ1)|} if m is odd,
max{|P (2k+1,2k+1)m (0)|, |ukm(µ1)|} if m is even,
whereµ0 andµ1 are the closest zeros ofukm′(x) less than0 and1, respectively.
Proof. For 0�m� 2, by symmetry of|ukm(x)| with respect tox = 0, the assertion is trivially true.Letm� 3. By Theorem 4.1 and Lemma 4.2, we have the successive relative maxima of|ukm(x)| which
form a decreasing sequence asx increases from 0 toνkm < 1. By Lemma 4.3, there exists at most olocal maximum of|ukm(x)| in (νkm,1). Thus|ukm(x)| has the maximum atx = ν0 or ν1 if m is odd and atx = 0 or ν1 if m is even, and the assertion is obtained.✷
We finally prove Theorem 2.2 using the lemma above.

434 Y.J. Ahn / Computer Aided Geometric Design 20 (2003) 423–434
rk was
dpoint
er Aided
t. Math.
–208.
Proof of Theorem 2.2. Since
J kn (t)= (−1)k+1ukn−2k−2(2t − 1)
22k+2( 2n−2n−2k−2
) ,
Lemma 4.4 yields that the assertion is clearly true for oddn. For evenn, by Eq. (1), we have
∣∣J kn (1/2)
∣∣ = |P (2k+1,2k+1)n−2k−2 (0)|
22k+2( 2n−2n−2k−2
) .
By Eqs. (4.7.1) and (4.7.31) in (Szego, 1975), we have
∣∣P (2k+1,2k+1)n−2k−2 (0)
∣∣ =(4k+2
2k+1
)((n+2k−1)/2
2k+1/2
)(n+2k2k+1
)and thus
∣∣J kn (1/2)
∣∣ =(4k+2
2k+1
)((n+2k−1)/2
2k+1/2
)22k+2
(n+2k2k+1
) ( 2n−2n−2k−2
) =(
n−1n/2−k−1
)2n
( 2n−2n−2k−2
) .Hence Eq. (3) is obtained.✷
Acknowledgements
The author is very grateful to the referees for their valuable criticisms and suggestions. This wosupported by Korea Research Foundation Grant (KRF-2002-015-CP0040).
References
Ahn, Y.J., 2002. Geometric conic spline approximation in CAGD. Comm. Korean Math. Soc. 17 (2), 331–347.Bogaki, P., Weinstein, S.E., Xu, Y., 1995. Degree reduction of Bézier curves by uniform approximation with en
interpolation. Computer Aided Design 27, 651–662.Brunnett, G., Schreiber, T., Braun, J., 1996. The geometry of optimal degree reduction of Bézier curves. Comput
Geometric Design 13, 773–788.Cheney, E.W., 1982. Introduction to Approximation Theory. Chelsea, New York.Chihara, T.S., 1978. An Introduction to Orthogonal Polynomials. Gordon and Breach, New York.Davis, P.J., 1975. Interpolation and Approximation. Dover Publications, New York.Eck, M., 1993. Degree reduction of Bézier curves. Computer Aided Geometric Design 10, 237–251.Eck, M., 1995. Least squares degree reduction of Bézier curves. Computer-Aided Design 27, 845–851.Farin, G., 1993. Curves and Surfaces for Computer Aided Geometric Design, 3rd Edition. Academic Press, Boston.Kim, H.J., Ahn, Y.J., 2000. Good degree reduction of Bézier curves using constrained Jacobi polynomials. Compu
Appl. 40 (10–11), 1205–1215.Lachance, M.A., 1988. Chebyshev economization for parametric surfaces. Computer Aided Geometric Design 5, 195Lachance, M.A., 1991. Approximation by constrained parametric polynomials. Rocky Mountain J. Math. 21, 473–488.Szego, G., 1975. Orthogonal Polynomials. In: Coll. Publ., Vol. 23. AMS, Providence, RI.Watkins, M., Worsey, A., 1988. Degree reduction for Bézier curves. Computer-Aided Design 20, 398–405.Watson, G.A., 1980. Approximation Theory and Numerical Methods. Willey, New York.