Embed Size (px)
Citation preview

Microelectronic Engineering 43–44 (1998) 725–731
Using FEM models for the generation of microcomponentdescriptions on various levels of interest
*Markus Lang , Klaus Hofmann, Manfred GlesnerDarmstadt University of Technology, Institute of Microelectronic Systems, Karlstraße 15, 64283 Darmstadt, Germany
Abstract
The design of microsystems with components from heterogeneous domains requires a division of work between specialistsfor system aspects, component design, fabrication and process related questions. In this paper a set of CAD-tools whichserve as interface between different levels of abstraction is presented. These tools allow a top-down design flow and an easyand fast adaptation of parametric microcomponents towards personal requirements. This concept is demonstrated using anacceleration sensor. 1998 Elsevier Science B.V. All rights reserved.
Keywords: CAD for microsystems; Theoretical methods
1. Introduction
The design of microelectromechanical sensors and actuators is still done in the bottom-up designmethodology due to technological problems, i.e. the sensor or actuator is constructed on the layout orstructural level with the process or design limitations in mind. Microelectromechanical sensors andactuators are commonly part of a more complex system, i.e. the sensed physical values are detected ordriven by a combination of microelectronic and micromechnical components. It is therefore necessaryto perform a common simulation of both components in order to estimate their mutual influence [1].The problem hereby is to create accurate behavioral models of both heterogeneous components to beused in a single simulator [2,3]. Furthermore, it is useful to create accurate behavioral models from astructural description in order to perform design optimizations on the system level [4].
On the other hand, as a design normally starts from the structural level, e.g. with a Finite Element(FE) model, a transfer down to the layout level with regard to the design rules and process limitationsis necessary. This step is still done by hand and therefore time consuming and susceptible to faults.
Both changes between levels of abstraction start with a FE model. Therefore, the CAD toolspresented herein are interfaces from a FEM simulator downwards and upwards.
*Corresponding author. Fax: 1 49 6151/16-4936; e-mail: [email protected]
0167-9317/98/$19.00 Copyright 1998 Elsevier Science B.V. All rights reserved.PI I : S0167-9317( 98 )00250-0

726 M. Lang et al. / Microelectronic Engineering 43 –44 (1998) 725 –731
2. Automatic generation of behavioral models starting from Finite-Element modeldescriptions
Starting from a Finite Element description (using the FE-simulator ANSYS) this CAD tool shouldbe able to generate a behavioral description which can be used in commercial analog simulators (e.g.the Eldo-simulator by ANACAD). The FE model is therefore excited by several binary bit patterns[5,6]. This simulation is performed automatically, i.e. only the database and the log-file of an ANSYSsession is used in order to create the simulatable FE model. This is done by an ANSYS code parserwritten in a LISP-like language. Using parts of the input /output behavior of that component acomponent library of behavioral models (in HDL-A) is searched to find the best matching behavioralmodel. This model is extracted from the library and used as a starting model for the following globaloptimization algorithm. The global optimization scheme consists of a parameter optimization moduleand a module for the creation of a new behavioral model. The parameter optimization module usesdifferent algorithms (such as gradient, simulated annealing, genetic algorithms) in order to find thebest set of parameters for a given behavioral model. If this set of parameters meets the desiredaccuracy, the algorithm terminates. In most cases the structure of the behavioral model will not besufficient to be matched to a FE model. In this case the lacks of the behavioral model are identified byoperators, whereby each operator returns a fuzzy-value (i.e. ‘‘Behavioral models lacks of a nonlineareffect’’).
These operators are connected in a expert rule database which contains the knowledge of thedesigner as well as results which may come from simpler theoretical calculations. Fig. 1 shows thatafter the parameter optimization has failed (i.e. there is no better set of parameters to achieve a higher
Fig. 1. Functional diagram of the CAD tool.

M. Lang et al. / Microelectronic Engineering 43 –44 (1998) 725 –731 727
accuracy for the behavioral model with respect to the FE model) a new block is executed which has toidentify the lacks of the behavioral model. The CAD tool provides a variety of possibilities to identifythose lacks:
• by applying traditional identification techniques (only possible for certain effects such as poles,zeros, gains etc.)
• by applying observational techniques (‘‘what the designers eye sees’’)
Each of those techniques (called operators) is implemented in a way that it returns a value between 0.0(statement connected with the operator does not apply at all) up to 1.0 (statement connected with theoperator is absolutely true). A variety of 27 operators has been implemented, but more operators maybe easily implemented by the creator of the rule database.
In the following section the generation of the behavioral model of an acceleration sensor designedat Darmstadt University of Technology [7] is presented. The sensor has been simulated using 3bitpatterns with 50 bits. An expert-rulebase has been created containing 12 rules for linear andnonlinear effects. A start-model has been selected which contained two effects: A linear pole and apositive gain. Out of three trials the best optimization run can be described as the following:
From the beginning, the parameters of the simple two-effect model have been optimized. The ruledatabase recognized without any doubt that the effect ‘‘positive offset’’ was missing. Using thisimproved three-effect model (still linear) an accuracy of 9.47% had been achieved.
For the expert’s eye it is obvious that the behavioral model is missing a nonlinear saturation effect.Two out of the three optimization runs realized this and inserted an atom containing an arctan (whichis applied only to the upper 50% of the waveform). The arctan contained one parameter which affectsthe bending of its curve. 30 CPU-min later the CAD tool produced a new set of parameters.
Fig. 2. Waveforms representing an accuracy of 2.21%.

728 M. Lang et al. / Microelectronic Engineering 43 –44 (1998) 725 –731
Targeting an accuracy of 1%, the optimization run was continued. Out of the two remaining runsone decided to insert a second pole. Approx. 1 CPU-h later the CAD tool delivered a set of parametersrepresenting an error of 2.21%, see Fig. 2.
Despite further insertions of poles (and zeros) no improvement in accuracy could be achieved. As aconclusion the optimization runs were very satisfying since
• only three trials were needed to adapt the rule-weights to a reliable rule database• a nonlinear model has been generated in less than 3 CPU-h• the generated behavioral model served as a starting model for future generations of acceleration
sensors (currently a research topic at THD)• the created model is more accurate than any linear model for the same purpose.
3. Automatic generation of a layout starting from Finite Element model descriptions
In contrast to the generation of a behavioral model out of a structural model, which is possibleindependently from the underlying process, the generation of the layout for fabrication is stronglydependent on the process used. Therefore, the FEM-to-layout converter presented herein has beenconceived in a first step for a well defined process, namely an extended CMOS process [8], wheresuspended structures can be designed.
In order to enable the automatic generation of a mask representation from a FE model, listscontaining the geometric information (areas, lines, keypoints) about the structural model of asuspended structure are created in ANSYS. From these lists the principal mask forming the boundaryof a suspended structure is generated in the CAD tool presented herein. This also includes an
Fig. 3. Schematic diagram of FEM-to-layout converter.

M. Lang et al. / Microelectronic Engineering 43 –44 (1998) 725 –731 729
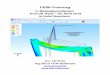
Fig. 4. FE model and automatically generated layout of a suspended membrane with arms.
inversion, as in the layout the masks represent the etch holes whereas in a FE model the structureitself is modeled. If necessary, a rotation and a mirroring action also can be performed, e.g. if only ahalf or a quarter of a symmetrical model is used for the FEM simulation [9]. As suspended structuresin this process are formed by four different layers having an overlap over each other, the additionalmasks are generated automatically by zooming (following the design rules). The resulting masks thencan be stored either in a CIF or a EDIF file for further use in a layout editor (in our case CadenceDFW II), e.g., in order to include microelectronic components (signal processing etc.). Fig. 3 shows aschematic diagram of the FEM-to-layout converter.
In Fig. 4 there can be seen a FE model of a membrane with two arms and the correspondingautomatically generated layout. The crosses inside the membrane are etch holes which ensure that themembrane is totally freed during etching. It has to be stressed, that each hatched area in the layoutconsists of four different layers. Therefore it’s obviously, that, if the corresponding layout is drawn byhand, the time needed as well as the danger of faults is not negligible.
Up to now, the FEM-to-layout converter can process FE models, which are designed for anextended CMOS process, but an implementation of other common micromachining processes like abackside anisotropic wet etching/ front side RIE is a task of current investigation.
4. Top-down design flow for parametric microcomponents
As the tools presented above provide the possibility for an automatic transfer of microcomponentsbetween several levels of abstraction, the automatic generation of sets of parametric microcomponentson all mentioned levels can be achieved easily. Geometric dimensions as well as material propertiesare possible parameters. In each case, the optimization of a parametric component towards givenrequirements takes place in ANSYS. If a solution is found, the behavioral model and the layout aregenerated from the structural FE model and stored in separate databases. For example, the width andthe length of the arms of the membrane in Fig. 4, which is used as an acceleration sensor (as presented

730 M. Lang et al. / Microelectronic Engineering 43 –44 (1998) 725 –731
Fig. 5. Complete top-down design flow.
in Section 2), can be changed in order to obtain a certain fundamental frequency of the wholestructure. This in return changes the sensitivity and the maximal applicable acceleration of this sensor.If this is done for several different widths and lengths, one gets sets of representations for thiscomponent. Whereas a top-down step is always done in the FEM-to-layout conversion, the FEM-to-HDLA conversion is for the present a bottom-up step. But if enough different models are derivedfrom the original parametric model (especially including models, which represent the lower and upperborder of possible designs), one can find that model which approximately meets his requirements or atleast some guidelines can be derived as to what changes have to be done to fit the model to personalneeds.
Therefore, the chosen HDLA model then is the starting point for a complete top-down design,where the corresponding FE model can, if necessary, be used for further investigations or where thelayout can be included directly in, e.g., a more complex design. If several different parametriccomponents are included in such a database system, an easy design with a kind of standard cells likein the microelectronic world is possible. Fig. 5 shows the complete top-down design flow.
5. Conclusion and outlook
In this paper we presented two CAD tools for microsystem design, which on the one handautomatically generate a behavioral model out of a FEM description and on the other hand convert a

M. Lang et al. / Microelectronic Engineering 43 –44 (1998) 725 –731 731
structural FE model into the corresponding layout. As the time needed and computer resources for thegeneration of the HDLA model are not negligible, this approach preferably should be used only fornonlinear models. The automatic layout generation is applicable to all kind of designs within anextended CMOS processes. Both tools together enable a top down design flow for microsystems.
Further work has to be done particularly on the extension of the FEM-to-layout converter towardsother commonly used micromachining processes. In order to address a wider range of applications,more components have to be designed and included as parametric ‘‘standard cells’’ into the databases.Moreover, a fuzzy based selection or adaptation of structural models from given sets will be tested.
References
[1] A. Poppe, J.M. Karam, K. Hofmann, M. Rencz, B. Courtois, M. Glesner, V. Szekely, CAD framework concept for thedesign of integrated microsystems, Micromachining and Microfabrication 95, 23–24 October 1995, Austin, TX.
[2] G. Casinovi, A. Sangiovanni-Vincentelli, A macromodeling algorithm for analog circuits, IEEE Trans. Computer-AidedDesign 2 (1991) 150–160.
¨[3] K. Hofmann, M. Glesner, Generierung von HDL-A-Modellen fur Komponenten heterogener Systeme, 2. GI / ITG/GME-Workshops Hardwarebeschreibungssprachen und Modellierungspara digmen am 15. 1 16.2.96 in Darmstadt.
¨[4] K. Hofmann, J.M. Karam, M. Schulze, M. Theisen, B. Courtois, M. Glesner, Automatische Ubersetzung vonFEM-Modellen in eine analoge Hardwarebeschreibungssprache, Mikrosystemtechnik and Mikroelektronik 95, 16–17,Oktober 1995, Chemnitz.
[5] L.S. Pontrjagin, Mathematische Theorie optimaler Prozesse, Oldenb. Verlag, 1964.[6] R. Isermann, Identifikation dynamischer Prozesse Band I 1 II, Springer, 1988.[7] M.Lang, M. Glesner, An Acceleration Sensor in CMOS-Compatible Technology for Integration in Complex Systems,
Micromechanics Europe MME ’96, Barcelona.[8] J.M. Karam, B. Courtois, M. Bauge, High Level CAD Melds Microsystems with Foundries, Proceedings of the ED and
TC ’96, Paris.[9] M. Lang, D. David, M. Glesner, Automatic Transfer of Parametric FEM Models into CAD-Layout Formats for
Top-Down Design of Microsystems, in: Proc. ED and TC 97, Paris.