Embed Size (px)
Citation preview

1 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
ww
w.sla
mte
c.com
Shanghai Slamtec.Co.,Ltd
APOLLO General Purpose Robot Platform Standard Version
User manual
Model: A2M21
2018-0
1-1
8 rev.1.0

2 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
CONTENTS ................................................................................................................................................... 2
OVERVIEW ................................................................................................................................................... 3
INTRODUCTION................................................................................................................................................... 3
BASIC FUNCTION ................................................................................................................................................ 3
OPTIONAL FUNCTION ......................................................................................................................................... 4
INTERIOR MODULE BLOCK DIAGRAM ................................................................................................................ 4
PARTS ............................................................................................................................................................ 5
APOLLO .............................................................................................................................................................. 5
SENSORS ............................................................................................................................................................. 5
CHARGER ............................................................................................................................................................ 6
DEMO MODULE(OPTIONAL) ......................................................................................................................... 8
EXTENDED PLATFORM ............................................................................................................................. 9
INTRODUCTION................................................................................................................................................... 9
PORT DEFINITION ............................................................................................................................................... 9
DEPLOYMENT AND USAGE ................................................................................................................... 12
APOLLO DEPLOYMENT ..................................................................................................................................... 12
CONNECT TO COMPUTER ................................................................................................................................. 17
DEBUG TOOLS .................................................................................................................................................. 17
CHARGING AND BATTERY ................................................................................................................................. 18
ATTENTION ............................................................................................................................................... 21
TROUBLESHOOTING ............................................................................................................................... 22
MECHANICAL DIMENSIONS ................................................................................................................. 24
APPENDIX .................................................................................................................................................. 25
IMAGE AND TABLE INDEX .................................................................................................................................. 25
Contents

3 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Introduction
Apollo is a medium-sized general purpose robot development platform
developed by SLAMTEC to meet the requirement of medium-size robot
application like reception robot, shop guiding robot and etc. Its build-in
SLAMWARE autonomous localization and navigation module adds the function of
path finding and navigation to it. And different applications can be integrated with
Apollo to make it work in varies business places. Apollo is equiped with ultrasonic
sensors, cliff sensors, depth cameras and etc., which help Apollo walk freely and
respond well in complicated business environments. In addition, its optional
version manages to self-ride an elevator and build map for multi-story buildings,
which fits in more application scenarios.
Apart from the above core features, we have designed Ethernet port, power supply
port and several control ports on the extended platform of Apollo to promote its
related extension and development. Apollo can communicate with external world
via wired or wireless network and its own battery provides power supply for itself
and the extended module connected to it. And our users can control the whole
Apollo and its upper extended module via varies control ports and pins.
Apollo A2M21 standard version has a complete base design, therefore, there is no
need for users to make additional efforts in its external design. It works as a
complete robot base waiting for upper system development right out of the box.
Basic Function
Autonomous Mapping for Localization and Navigation
The Apollo platform has the feature of autonomous map building, localization and
navigation. There is no need for human assisstance during its working process. It
can find the proper path to a specified place by itself and move there freely. And
it also supports multi-line patrol mode like a security guard.
Autonomous Recharging
We provide open source interface for users and developpers to use it for their
own upper application on Apollo, which can realize the recharging feature of
Apollo, namely, the ability to go back to the charge station to charge itself when
it has a very low battery.
Third Party Application Development
The Apollo has a totally free platform both in software and hardware and we offer
technical support for external extended hardware. Our users can focus on the
developing of business logic appplication via SLAMWARE SDK.
Overview

4 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Optional Function
Self-riding elevator
With built-in solution for multi-story building, Apollo can work with corresponded
floors seamlessly. After integration, Apollo can move into an elevator
automatically, detect its current floor in rea time and move out to specified floor’s
destination.
Autonomous Mapping for Multi-story Building
Apollo is supported to bulid map for multi-story buildings. When getting to each
floor, Apollo marks the current floor and bulid map for that floor. The multi-story
building map is useful for preparing floor plans, shop navigation, evacuation plans
and etc. End users can check those maps at any time.
Interior Module Block Diagram
The followig figure describes the communication between Apollo and external
system, the connection of power supply and emergency stop.
Figure 1-1 Connection between Apollo and External System
User
External
system
Apollo
Host system
Wired network/WIFI
Emergency stop
User power supply port
System/user/power control port
WIFI
Charging port

5 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Apollo
Appearance and Structure
Apollo is a white cylinder-shaped robot base and all its edges are soft and smooth,
which gives Apollo a nice and friendly outlook and feel. With lower barycenter,
Apollo moves more safely and stably. Please refer to mechanical dimensions for
more design details.
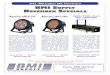
Sensors
Figure 2-1 Apollo Sensor Configuration
Lidar Sensor
Apollo is equipped with a high performance Lidar with scan range more than 15
meters. Based on the map data provided by the Lidar, Apollo can build map with
resolution up to 5cm and realize autonomous path finding and navigation.
Ultrasonic Sensor
Apollo has 3 ultrasonic sensors distributed in the front edge of its base. The
coverage area of those sensors is 40 cm in length right ahead of Apollo. Those
sensors are mainly used for detecting highly transparent obstacles to improve the
performance of Apollo in mapping and obstacle avoidance.
Depth Camera
Parts

6 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
The depth camera on the top of the Apollo, with a visual angle 45°x35° and a
visual range 1.3m, makes Apollo can detect the obstacles above the Lidar layer
and send command out to avoid them.
Cliff Sensor
There are 3 cliff sensors in the front bottom edge of Apollo. The minimum
detected depth is 5cm. When Apollo walks to an edge of a step, the cliff sensor
can detect the step and send signals out to request the change of the robot
direction. Therefore, the robot can avoide falling down from a higher place and
move freely.
All the above sensors ensure the high perpormance of Apollo path planning,
navigation and obstacle avoidance when it walking in varies complicated
environments.
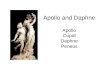
Charger
Figure 2-2 Apollo Charger
Apollo has a charger that supports autonomous recharging. After Apollo sending
out a recharging command, Apollo will go back to the charger and charge itself
automatically.

7 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Charger indicators description:
Indicator Preset
Condition Status Description
Power
Indicator
(charger)
Charger
power on Red light
The charger is powered on
normally.
Charger
power off
Light goes
out The charger is power off.
Exceptions Light flicks
or goes out
There are problems in the
charger.
Charging
indicator
(Power)
Not charging Light goes
out
The charger is not charging
Apollo.
Fully charged Green light Apollo is fully charged.
Charging Red light Apollo is charging normally.
Exceptions Light flicks
or goes out
There are problems in the
charger.
Figure 2-3 Apollo Charger Indicators Description
Charger ports description:
Figure 2-4 Apollo Charge Station Interface Description
Name Parameter Description
Charging port 220-240VAC Provides power supply for the charger.
Charging
electrode 25.2V 10A Provides contact charging for Apollo.
Emergency
charging port 25.2V 10A
Provides charging for Apollo in
emergency, such as the charging
electrode not working.
Firmware
upgrade port USB
Provides firmware upgrading for Apollo
charger.

8 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
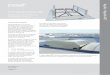
Demo Module(Optional)
Figure 2-5 Apollo Demo Module
The demo module can monitor the control signal of upper system to simply but
efffectively control the power supply and moving of Apollo.
The recommended switch to be designed and their usage are as below:
Figure 2-6 Apollo Demo Module Switch Description
Switch Type Description Note
Emergency
stop
switch
Used for controling Apollo in
emergencies. After pressing this switch,
Apollo will stop moving immediately.
This switch is a must
to design, or Apollo
will refuse to work.
Release
switch
Corresponded with the emergency stop
switch, after pressing down the
emergency stop switch, user need press
the release switch to recover Apollo to
normal status and continue other
operations, like manually pushing Apollo
moving.
Apollo switch
This switch is the power switch for Apollo.
Short press for power-on and long press
for power-off.
Upper switch
This switch is the control switch for the
power port of upper system or upper
computer. Short press for power-on and
long press for power-off.
System
switch
This switch is the power switch for the
whole system. Short press for power-on
and long press for power-off.
Generally, user can
ignore Apollo switch
or upper switch, and
only design this
switch to replace the
above two.

9 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Introduction
As shown in the following figure, the extended platform of Apollo is a rounded
table with 220mm in radius. The whole top surface is all-steel and is processed
by black phosphating solution. There are five M6 threaded holes regularly
distributed on the table, which can meet various requirements of fixing the upper
module on the Apollo. Please refer to the following figure for the specific position
of threaded holes and the port dimensions.
Figure 3-1 Apollo Extended Platform
Port Definition
Extended Platform

10 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Figure 3-2 Apollo Extended Platform Interface Definition
Pin Definition of Control Port
Figure 3-3 Pin Definition of Apollo Extended Platform Control Port
Name Parameter Description Note
Ethernet
port 100/10Mbps
Used for
communication
between users and
Apollo.
IP Address 192.168.11.1 ~
192.168.11.100 are reserved for the
bases of Apollo. Therefore, when
using this Ethernet port, please
ensure that the IP address of the
device connected to Apollo not uses
the above IP address. Or IP conflict
may occur. Please refer to the
SLAMWARE SDK for detailed
communication protocols.
Power port
DC 18-
25.2V 10A
Max
Used for providing
power supply for the
device of users.
The end marked as 1 is positive
while 2 is negative.
Control
port DB-15
Self-defined 15 pin
port. User can design
this port according to
their own needs.
Please refer to the following figure
for control port definition and pin
definition, and the supported switch
type for the reference design of the
control port.
Emergency
charging
port
25.2V 10A
Used for charging
Apollo under
unexpected situations
such as the charger
electrode not working.

11 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Supported Switch Type and Description of Control Port
Figure 3-4 Supported Switch Type of Apollo Extended Platform Control Port
Switch Name Description Note
Emergency stop
switch
(Pin5 & Pin8)
Used for controling Apollo in
emergencies. Apollo will stop
moving immediately after
pressing this switch.
This switch is a must to
design, or Apollo will refuse
to work.
Release switch
(Pin6 & Pin7)
Corresponded with the
emergency stop switch, after
pressing down the emergency
stop switch, user needs to press
the release switch to recover
Apollo to normal status and
continue other operations
Checking method
Internal pull-up to check the
time width of the low level.
Open time:
50ms~3000ms(Typical value is
300ms, and it is invalid to
repeat this operation if it has
already been in open status.)
Close time:
3000ms~15000ms( Typical
value is 4000ms, and it is
invalid to repeat this
operation if it has already
been in open status.)
Apollo power
switch
(Pin3 & Pin13)
This switch is the power switch
for Apollo. Short press for
power-on and long press for
power-off.
Upper system
power switch
(Pin4 & Pin14)
This switch is the control switch
for the power port of upper
system or upper computer.
Short press for power-on and
long press for power-off.
System switch
(Pin2 & Pin12)
This switch is the power switch
for the whole system. Short
press for power-on and long
press for power-off.
Generally, user can ignore the
Apollo switch and the upper
switch, and only design this
switch to replace the above
two.

12 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Apollo Deployment
1. Place Charger
With the charger, Apollo can recharge itself automaticallty. Therefore, the charger
requires to be put properly to ensure its performance. When Apollo goes back to
the charger, it will have a driving force, so it’s better to put the charger back against
a wall. And the wall should meet the following requirements.
a. The charger should fit the wall closely and there is no obstacles between
them. The wall with skirting line is not recommended.
b. The wall should not be made of transparent material like mirror or glass.
c. The wall should be at least three times the width of the charger.
d. The wall should be a straight wall instead of a curved one.
The charger requires a 220V power supply and its external power supply wire is
1.5m in length. So it’s better that there is a power port on the wall for the
charger(the power board is not recommended since it may cause danger due to
massy wires).
The ground in front of the charger should meet the following requirements:
a. Open. There is no obstacles in front of the charger ( with the charger as the
center and within a radius of 2 meters from the center).
b. Level. There is no slope on the ground.
c. There is no soft carpet on the ground which leads Apollo sinking into it
more that 2cm.
Please always launch Apollo from the charger to ensure that it can recharge itself
properly.
Note: if the charger is moved to a different place when using Apollo, user should
reset the charger position accordingly when loading the map. Please refer to the
detailed interfaces description in our SDK document.
2. Launch Apollo
As shown in the following figure, find the air switch and turn it on, then press the
system switch on the demo module to start the system. Once succeeded, the
system indicator turns red and the buzzer beeps several times. It takes one
minute to start the system.
Deployment and Usage

13 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Figure 4-1 Apollo Air Switch and System Switch
3. Build and Save Map
Download and install the robot graphical tool RoboStudio from our official website
http://www.slamtec.com/cn/RoboStudio. Register and login to the tool. By clicking
File->Robots in the menu, user can find a docked window opened in the left side
of the pane as in Figure 4-2. In this window, user can connect to or disconnect
from robots.
Figure 4-2 RoboStudio Robot Interface
Right click the whitespace of the robot list -> choose manual connect robot in
the prompt dialog box, -> enter the IP address and port number in the new dialog
box -> click Connect to connect to the robot as shown in the following screenshot.
If you have already connected to the SSID obtained in step 3 via network adapter
System Switch
Air switch

14 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
on computer, please enter the default IP address 192.168.11.1 in the above dialog
box. (The IP address of your wireless adapter network should be DHCP mode)
Figure 4-3 RoboStudio Robot Connection Dialog Box
Once connected successfully, the major work area will show the robot, map
information and its status. The robot name will turn to green and the robot status
will turn to Connected as below.
Figure 4-4 RoboStudio Robot Connection
Right click a point in the place where you want to build a map, and Apollo will
follow the point to build map. After mapping, add virtual walls to the places where
you want to isolate them from robot. Click File->MapEditor and choose saving
the map file to local or uploading it to the firmware.

15 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Figure 4-5 RoboStudio Robot Map Editing Window
4. Launch Host Computer and Load the Map
The following code shows how to finish loading specified map by using SDK on
the upper computer.
1. /*
2. * upload map file to apollo
3. */
4. #include <iostream>
5. #include <rpos\robot_platforms\slamware_core_platform.h>
6. #include <rpos\robot_platforms\objects\composite_map_reader.h>
7. #include <rpos\core\pose.h>
8.
9. using namespace std;
10.
11. int main()
12. {
13. try
14. {
15. string map_path = ".\\map.stcm"; //the path of map
16. string apollo_ip = "192.168.11.1"; //the ip of apollo
17. int apollo_port = 1445; //the port of apollo ,default is 1445
18.
19. rpos::robot_platforms::SlamwareCorePlatform apollo =
20. rpos::robot_platforms::SlamwareCorePlatform::connect(apollo_ip, apollo_port);
21. //connect to the apollo
22. rpos::robot_platforms::objects::CompositeMapReader cmapreader;
23. //map reader
24. rpos::core::Pose apollo_pose = rpos::core::Pose(rpos::core::Location(0, 0, 0));
25. //the Apollo pose in map(apollo_pose should be the apollo's real pose in new map)
26. //using apollo.getpose() to get the old apollo pose
27. auto map = cmapreader.loadFile(map_path);
28. //load map
29. apollo.setCompositeMap(*map, apollo_pose);
30. //set compositemap
31. rpos::core::Pose home_pose = rpos::core::Pose(rpos::core::Location(0, 0, 0));
32. //the home pose in map(home_pose should be the home's real pose in new map)

16 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
33. //using apollo.gethomepose() to get the old home pose
34. apollo.setHomePose(home_pose);
35. //set home pose
36. }
37. catch (rpos::robot_platforms::ConnectionFailException &e)
38. {
39. cout << "connect failed on " << e.what() << endl;
40. }
41. catch (rpos::system::detail::ExceptionBase &e)
42. {
43. cout << "failed on " << e.what() << endl;
44. }
45.
46. return 0;
47. }
Please refer to our SDK reference for more movement deployment.

17 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Connect to Computer
Wired Connection
According to the requirements from actual application development, we have
designed a RJ45 Ethernet port on the extended platform of Apollo. Therefore, user
can directly connect Apollo to PC via network cable for extension or further
development.
Wireless Connection
To help our user test Apollo and meet the requirements in future actual
application scenarios, Apollo also supports wireless connection. User can connect
to the SSID of Apollo with a computer and then connect to Apollo with its default
IP address 192.168.11.1. In addition, user can use our Web Portal tool to distribute
a specific IP address for Apollo and use it for connection.
Debug Tools
RoboStudio
RoboStudio graphical tool is used for testing and controlling Apollo. Please
download it from our official website as below:
http://www.slamtec.com/cn/RoboStudio
In the same page, we also provide a document to introduce the usage of this tool.
Web Portal Tool
During developing, testing and controlling the SLAMTEC robtots like Apollo, our
users can do many things to our robot via the Web Portal tool, such as checking
basic information,upgrading firmware and configuring WiFi. (Default username:
admin. Default password: admin111)
Our Web Portal currently supports the following features:
1. Check the information of the robot;
2. Restart the SLAMWARE module;
3. Upgrade firmware
Slamtec provides Apollo firmware renewal and upgrade regularly. Our users can
upgrade firmware via the Web Portal tool. Please ask for the latest firmware from
our support engineers or sales representatives. The upgrade progress lasts for
5~10 minutes and the buzzer beeps during the upgrade process.

18 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Apollo will restart once the upgrade finished. Before that, please ensure that
Apollo has sufficient electricity.
4. WiFi configuration;
5. Start diagnosing SLAMWARE core;
6. Modify admin password;
For usage details, please refer to the following document:
https://wiki.slamtec.com/display/SD/SQ001+SLAMWARE+Web+Portal+Function
+Overview
Charging and Battery
There are two ways to charge Apollo battery.
Contact Charging
Apollo has a charger supported automatically recharging. When the battery is
lower than 30%(this value can be adjusted by the upper system according to actual
requirements), Apollo will find the charger by itself and start recharging
automatically.
Manual Charging in Emergency
In some unexpected situations, like Apollo cannot recharge itself temporarily, user
can use emergency charging cable to charge Apollo The emergency charging port
of Apollo is shown in the following figure. Please use the emergency charging
cable to connect the emergency charging port on the charger and the charging
port on Apollo
Once the fan inside the charger starts work, the charger starts charging for Apollo.
Note: there is no indicator lighting up for charging in emergency.

19 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Figure 4-6 Manual Charging Connection
Battery Attention
Charging
Do not charge Apollo or its battery with non-official charging devices.
The battery should be charged within the range pf temperature specified in the
products Specification. Stop charging immediately when the surface temperature
of the battery is over 50℃.
Before charging, please ensure the polarities of the battery are connected properly.
Reverse charging is strictly prohibited. Reverse charging cannot charge the battery.
Inversely, it will induce fatal damage to the battery and even lead to battery
heating, swelling, leaking, fire and explosion.
Storage
The battery should be stored in a cool and dry place. If you are intend to keep the
battery for a long time (3 months or longer), it is recommended that the battery
should be stored under the dry environment with temperature during 10-25℃
and without corrosive gas. And the battery should be charged at least one time
every six months to ensure the voltage of the battery is between 3.6V-3.9V.
Attentional Notes
Since the battery is softly packaged with aluminum foil, it is vulnerable to sharp
objects. Please do not place the battery with sharp objects.
Charging port
Apollo emergency charging port

20 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Do not fall, hit or bend the battery or it may lead to fire.
Do not disassemble the battery in any circumstances or it may cause internal
short-circuit that results in swelling and fire.
Do not directly connect the positive and negative anodes of the battery or it may
lead to fatal damage to the battery and even fire.
Do not put the battery into fire or it may cause danger.
Do not put battery into liquid, such as water.
Do not charge the battery in a car.
Avoid violent vibration, shock and pressing during the transportation of the
battery and handle it gently when carrying it. The battery should be packaged and
protected with soft packing material.

21 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Handle Apollo base gently(do not kick, thrust or drag Apollo).
Do not spill any liquid on Apollo.
Do not use the recharging function of Apollo when it is walking on a soft carpet
which can sag more than 2cm.
Ensure that Apollo always starts on its charger.
Do not change or replace anything in the machine without autiorization.
Ensure that the load of Apollo meets the requirement of the specification.
Do not use Apollo on slope.
Do not use Apollo under environment with too many highly transparent
materials.
Attention

22 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Troubleshooting
No. Trouble Description Possible Cause Solution
1
There are noisy points
on the map built by
Apollo (laser points
appear in a place of
the map that has no
obstacles in the
related actual place).
There are dirt on the
surface of the Lidar.
Please use microfiber cloth
to clean the dirt on the Lidar.
There are obstacles
near the radar, such as
wires.
Please remove the obstacles.
Other causes
Please contact SLAMTEC
technical support for further
help.
2 Apollo cannot start
Air switch is turned off. Turn on the air switch on the
extended plarform of Apollo.
The battery becomes
low.
Charge Apollo via emergency
charging cable.
The wire connection of
build-in system switch
or designed switch
goes wrong.
Please check the Control
Port Definition and connect
related wires properly.
3
After launching Apollo,
you cannot control it
moving via computer
application.
The red emergency
switch is pressed
down(You cannot push
Apollo moving in this
condition).
Pull up the red emergency
switch.
The release switch is
pressed down(You can
push Apollo moving in
this condition).
Recover release switch.
Other causes
Please contact SLAMTEC
technical support for further
help.
4
The range of Lidar on
the map is less than
its standard range and
the laser light edge is
in line. The range will
go back to normal if
uplifting the front of
Apollo.
The ground is not level
or flat.
Please use Apollo on a level
and flat ground.
Other causes
Please contact SLAMTEC
technical support for further
help.

23 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Figure 6-1 Apollo Basic Problems and Solutions
5
The Apollo can not go
back to charge itself
normally.
The charger is move to
a different place.
Rebuild the map and do not
move the charger.
The charger position is
not set in the map.
Set the position of the
charger in the map.
The charger is
disconnected to power.
Check whether the charger is
properly connected to power.

24 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Figure 6-2 Apollo Mechanical Dimensions
Mechanical Dimensions

25 / 25 Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
Image and table index
FIGURE 1-1 CONNECTION BETWEEN APOLLO AND EXTERNAL SYSTEM ................................................................. 4
FIGURE 2-1 APOLLO SENSOR CONFIGURATION ..................................................................................................... 5
FIGURE 2-2 APOLLO CHARGER .............................................................................................................................. 6
FIGURE 2-3 APOLLO CHARGER INDICATORS DESCRIPTION ................................................................................... 7
FIGURE 2-4 APOLLO CHARGE STATION INTERFACE DESCRIPTION ......................................................................... 7
FIGURE 2-5 APOLLO DEMO MODULE .................................................................................................................... 8
FIGURE 2-6 APOLLO DEMO MODULE SWITCH DESCRIPTION ................................................................................ 8
FIGURE 3-1 APOLLO EXTENDED PLATFORM ........................................................................................................... 9
FIGURE 3-2 APOLLO EXTENDED PLATFORM INTERFACE DEFINITION ................................................................... 10
FIGURE 3-3 PIN DEFINITION OF APOLLO EXTENDED PLATFORM CONTROL PORT .............................................. 10
FIGURE 3-4 SUPPORTED SWITCH TYPE OF APOLLO EXTENDED PLATFORM CONTROL PORT .............................. 11
FIGURE 4-1 APOLLO AIR SWITCH AND SYSTEM SWITCH ..................................................................................... 13
FIGURE 4-2 ROBOSTUDIO ROBOT INTERFACE ..................................................................................................... 13
FIGURE 4-3 ROBOSTUDIO ROBOT CONNECTION DIALOG BOX........................................................................... 14
FIGURE 4-4 ROBOSTUDIO ROBOT CONNECTION ................................................................................................ 14
FIGURE 4-5 ROBOSTUDIO ROBOT MAP EDITING WINDOW................................................................................ 15
FIGURE 4-6 MANUAL CHARGING CONNECTION ................................................................................................. 19
FIGURE 6-1 APOLLO BASIC PROBLEMS AND SOLUTIONS .................................................................................... 23
FIGURE 6-2 APOLLO MECHANICAL DIMENSIONS ................................................................................................ 24
Appendix