-
8/21/2019 Use of Nyquist plot for Analog IC design
1/17
Analog Integrated Circuit Design
Prof. Nagendra Krishnapura
Department of Electrical Engineering
Indian Institute of Technology, Madras
ecture No ! "Negati#e $eed%ac& Amplifier 'ith Parasitic
Poles and (eros) Ny*uist Criterian
Hello and welcome to another lecture of analog integrated
circuit design, so far we have been
looking at what happens if you have a delay in a negative
feedback amplifier, and where
those delays could come from? The delays come from parasitic
poles in the system. We also
saw that pole acts like a delay for the integrator. So, today
what we will do is elaborate a little
bit on these things and then see how to conveniently judge the
stability of an amplifier and
how to design it, so that it is wellbehaved.
!"efer Slide Time# $$#%%&
So, this is our negative feedback amplifier and it could have a
delay Tdin the feedback path
or anywhere in the system. While 'uantifying the amount of the
negative feedback we have
computed the loop gain, and the loop gain of the particular
system without the delay is
!(u)k&)s, which can be defined to be (u,loop)s. Here
(u,loopis the unity loop gain fre'uency and
its given by !(u)k&, where (u is the unity gain fre'uency of
the integrator used to reali*e the
negative feedback system.
+ow, how much delay can be tolerated depends on the value of
(u,loop. So, our previous
analysis shows that for Tdless than or e'ual to )e times ) (
u,loop, that is by -./ times the
-
8/21/2019 Use of Nyquist plot for Analog IC design
2/17
time constant of the integrator. We get no overshoot in the step
response and essentially
behaves like an over damped system. That is for the Tdless than
this number it is e'uivalent
to an over damped system. for Tde'ual to )e times the time
constant of the loop gain, then
there is again no overshoot and this is the critically damped
system. So, this corresponds to
the higher delays that you can have without having an overshoot
in the step response. 0t also
corresponds to the fastest step response that you can have
without overshoot. That is why it is
the critically damped response critically damped system.
!"efer Slide Time# $1#2/&
+ow, when Td is between )e times the )(u,loop and between pi)-
times )(u,loop, what
happens is there is ringing in the step response, but the
ringing eventually die3s out. So, the
system is stable. 0n that if your apply a step there will be
some ringing and that thing
eventually dies out, and the same thing is true if you we have
initial conditions in the system,
they will eventually die out, but there can be a lot of ringing.
4ou can tolerate a little bit of a
ringing, but usually not a lot of ringing and for Tdmore than5
)(u,loopwhat happens is, there
are sustained oscillations.
So that means that if you apply a step then there is ringing and
it blows up also if you have
some initial conditions they won3t die down they will eventually
blowup and give a response
even without having an input. So, this is an oscillatory
condition and this is certainly
something that you do not want to have. 6nd for a good
amplifier, that means wellbehaved
-
8/21/2019 Use of Nyquist plot for Analog IC design
3/17
amplifier, you can tolerate a little ringing, it also depends a
little on the application that you
looking at7 you can tolerate a little ringing.
So, typically Tdless than about )- of the )(u,loopis tolerable.
+ow if your application says
that there has to be absolutely no ringing at all then you have
to make Tdto be less than )e
times )(u,loop. So, this is what is tolerable and if you have
Tdbeyond this, it will start ringing
more and more, and if you have Tdmore than pi)- times
)(u,loop,you will have sustained
oscillation and certainly you do not want to have that. So, now,
let us see what happened
when there is an e8tra pole and related to this one.
!"efer Slide Time# $#-&
What we said was there was e8tra pole in the loop somewhere7 we
have not at actually looked
at e8actly where it can be and it can come from parasitic
capacitances at various points in the
circuit. So, for now we will simply model it as our usual
system, an integrator with a unity
gain fre'uency (u, a voltage divider of fraction ) k. 6nd here 0
will simply have an ideal
block which models the pole, just like the delay it does not
matter where in the loop this pole
is. So, as long as it is in the loop it will affect the response
of the system.
So, the first thing is, we see that, the step response of the
loop gain without the e8tra pole will
be a ramp whose slope is (u)k or (u,loop. 0f you have an ideal
delay of Tdthen the step response
will have the same slope, but is delayed by an amount Td, this
corresponds to delay of Td. 6nd
finally, if you have a pole, if you have e8tra pole p-what
happens is that you will also have
-
8/21/2019 Use of Nyquist plot for Analog IC design
4/17
something like this and the response slowly rises. 9ut
eventually it will settle to a slope
which is the same as for the other cases, it is e'ual to
(u)k.
The slope is the (u)k and it is shifted hori*ontally by an
amount that depends on the pole. 6nd
0n fact, it is e8actly e'ual to )p-. So, a pole p-is
appro8imately the same as a delay of )p-.
We can e8pect a similar behavior that we know that if the delay
is very small, there will be no
overshoot in the response. 6s the delay becomes larger and
larger there will be overshoot.
Similarly if the pole p- is very large which corresponds to
small delay there will be no
overshoot. 6nd if the pole p-becomes very very small then you
will start having overshoot.
6nd in fact, we have already analy*ed this through the damping
factor and we have seen that
for this particular system, the damping factor will be half
s'uare root of the unity loop gain
fre'uency divided by the parasitic pole p-. +ow, for no
overshoot we need to have the
damping factor e'ual to one or more. So7 that means, that the
pole p -as to be at least four
times greater than the unity loop gain fre'uency, 0 made a
mistake in this e8pression, this as
to be p-divided by (u)k.
So, the damping factor will be more than or e'ual to if p -is
greater than e'ual to four times
(u)k and this is consistent with the notion that, a pole is
similar to a delay. 6 pole at p-
corresponds to delay of )p-. So, if the pole is at very
highfre'uency the delays very small
and there is no effect on the step response, if the poles comes
lower and lower in fre'uency,
then there will be an effect on the step response, in that it
will start ringing. 6nd the critically
damped case : e'ual to one corresponds to p -e'ual to four times
(u)k and you do not want to
have a pole that is substantially lower this, lower than this in
fre'uency.
-
8/21/2019 Use of Nyquist plot for Analog IC design
5/17
!"efer Slide Time# #2-&
+ow, one thing about the system with the pole that is different
from the system with the delay
is with single e8tra pole p-, the system is unconditionally
stable meaning there can be ringing
in the system, but there will never be a sustained oscillation.
This is because it is a second
order system and that is what it turns out to be, we will see
that when you have multiple e8tra
poles this is no longer the case. ;irstly, the system is
unconditionally stable, the system is
critically damped for p-e'ual to four times the unity loop gain
fre'uency and the system is
over damped for p-e'uals, p-more than four times unity loop gain
fre'uency.
So, now again we can tolerate this condition, we can violate
this condition a little bit, but not
by too much. it is ok to have, let us say p-is two times
(u,loopand this case we will get a little
bit ringing, but certainly we do not want make p -at a lower
fre'uency than this. 0n that case
you will have a lot more ringing and it will not be acceptable
in an amplifier. +ow, this shows
that with an e8tra pole the system behaves as though there is an
e8tra delay and the
conclusions that we drew from the original analysis with the
delay holds good even now.
-
8/21/2019 Use of Nyquist plot for Analog IC design
6/17
!"efer Slide Time# %#-%&
We will assume that the negative feedback amplifier as 0 assumed
two e8tra poles somewhere
in the loop. So, what happens in this cases the step response
without the parasitic pole of the
loop gain will be a ramp whose slope is (u) k, and with this
parasitic delay, it will initially do
something, but finally settled to a ramp with the same slope and
the delay of -)p-. 0n fact, if
you have multiple poles in the system each pole can the thought
of us contributing a delay of
one over that pole. So, this is the units of step response of
the loop gain and it again acts as a
delay.
So, for this particular case we will try to solve for the
condition, when there will be sustained
oscillations just we see what happens when you go to higher and
higher order systems. So,
=$)=iwill be e'ual to the gain of the forward path plus divided
by plus the gain of the
forward path times the gain of the feedback path, this you can
work out for yourself. >ven if
you do not know the formula by writing out the variables around
the loop you will be able to
work out this.
-
8/21/2019 Use of Nyquist plot for Analog IC design
7/17
!"efer Slide Time# #$/&
6nd this can be re rewritten as, in the standard form by
multiplying by plus s)p- s'uare
times s)!(u)k&. So, we will get5 this is what we will get
and for convenience, 0 will replace
this by variable (u,loop. 6nd now you can clearly see that as we
go to higher and higher order
system, evaluating the step response in a closed form and
finding out whether there is ringing
or not becomes very difficult, which is why we will later go to
the more convenient condition
in which we do not have to solve for it analytically.
So, but we will look at we will look at the conditions for which
this system is unstable. 6n
unstable system means the poles are on the j( a8is, here when 0
say poles, 0 am talking about
poles of the close loop system around the j( a8is or in the
right half plane. 6nd it turns out
that it is rather easy to solve for the condition where the
poles are on the j( a8is and that is
what we will do.
When the poles are on the j( a8is what happens is for a certain
fre'uency s j(, this
e8pression =$)=ibecomes infinity. ;or this condition =$)=iis
infinity for some s j(. +ow if
you had a single e8tra pole p- this would never happen, but for
more e8tra poles this can very
easily happen. So, how do we solve for this. We will set the
denominator to be e'ual to $, for
some s j(. So, what 0 have to do is, 0 have to substitute s j(
in this e8pression and set the
result to $. So, as usual i encourage you to try this out before
we look at my solution and find
the condition for which it happens.
-
8/21/2019 Use of Nyquist plot for Analog IC design
8/17
!"efer Slide Time# -$#--&
This is $ for some s j( and this is nothing but again for s j(.
So, with this means that -( -
by p-@(u,loopplus j( by (u,loopplus e'uals $. So, as you can see
there are two variables here,
the value of ( for which this happens and the condition on p -at
which this happens. 6nd
there are - e'uations because there is the real part of this
e'uation and there is also there
imaginary part of this e'uation. 6nd each of them as to be e'ual
to $ by e'uating them to $
you will get the two conditions. ;irstly, if you e'uate the real
part to $ you will get.
!"efer Slide Time# --#--&
-
8/21/2019 Use of Nyquist plot for Analog IC design
9/17
-(-divided by p- (u,loope'uals $ and if you e'uate the imaginary
part to $, you will get A
(1)!p--(u,loop& plus this part () (u,loope'uals $. 6nd this
gives you ( to be e'ual to p-and if
you substituted here, you will get, substituting in this first
e'uation you will get p- to be
(u,loop)- for the condition to hold.
-
8/21/2019 Use of Nyquist plot for Analog IC design
10/17
!"efer Slide Time# -B#1$&
So, for stability p- should be less than half the unity loop
gain fre'uency of and when p-
e'uals the unity loop gain fre'uency by -, the poles of the
closed loop system are on the j(
a8is, and when p- is more than (u,loop)-, close loop poles are
in the right half plane, which
also means an unstable system. So, just as before when p-
becomes very small the e'uivalent
delay becomes very large and this is becomes unstable.
So, we can carry this e8ercise for three e8tra poles and four
e8tra poles and so on and it is
most convenient, if you assume that all the parasitic poles are
in the same location. 9ut the
conclusion that you draw from this is, in general, even if you
have poles at different
locations, the total delay contribution due to all the poles
should be limited to certain value. 0f
the delay becomes too much the system will become unstable. 0
will 'uickly tabulate the
results.
-
8/21/2019 Use of Nyquist plot for Analog IC design
11/17
!"efer Slide Time# -/#-%&
So, let us say we have the case where there they are no e8tra
poles. 6nd this is the ideal case
that we had considered and in this case the loop gain is (
u,loop)s or !(u)k&)s. Cet me write it
more clearly, if you use an integrator of unity gain fre'uency
(uand make an amplifier with
gain of k with it, it will have a loop gain like this which
corresponds to (u,loop)s. 6nd this will
actually never ever become unstable. 0t is unconditionally
stable, it is a first order system
with a pole at (u)k and it is unconditionally stable.
So, let us say you have one parasitic pole at certain fre'uency
p-, the loop gain function will
be (u,loop)s by plus s)p-. 6nd actually even this never becomes
unstable, but it does get
under damped or shows ringing if p- is less than four times the
unity loop gain fre'uency.
6nd similarly you can have the two parasitic poles both
identical at p-. 0n this case the loop
gain function is this and you can calculate when it becomes
unstable. 6nd it becomes
unstable for p- less than $.2 (u, and you can do it for three
parasitic poles at p- and this is
the function and this becomes unstable for p- less than .B
(u.
Sorry .1 (uand finally, you can also try a % and 2, and how many
were you wish to have.
6nd here also the system can become unstable, this is the
function and this becomes unstable
for p- less than .B (u. So, to summari*e an e8tra pole is like a
delay and as the delay
increases, we will tend to have ringing in the system and when
the delay increases a lot, you
can even have instability. That means, the system can give you
an output even without an
-
8/21/2019 Use of Nyquist plot for Analog IC design
12/17
input, you can think of it as the gain becoming infinity at some
particular fre'uency or the
poles being in the right half plane.
+ow, it turns out that for the special case of a single e8tra
parasitic pole, the system is never
unstable. 0t can ring, but it never unstable. So, you still have
to make sure that the parasitic
pole is at high enough fre'uency to ensure that the ringing is
limited and that limit is usually
two times the unity loop gain fre'uency. 6nd if you do not want
any ringing at all the
parasitic pole as to be at least four times the unity loop gain
fre'uency. +ow, you can have -
or 1 or % e8tra parasitic poles and they can be at a various
locations, but for analysis, it3s
easiest if you assume that all of them are at the same location.
6nd if you have two identical
parasitic poles p- what happens is the system can become
unstable. 6nd it happens for p-
lesser than $.2 (u,loop.
So, all of these have written here should be ( u,loop, $.2
(u,loopand for three e8tra parasitic poles
it is .1 (u,loopand four of them it is .B (u,loop. +ow, in the
other thing you also notice is
that when you increase the number of poles, the permissible
location for the pole is at a
higher fre'uency. ;or instance with two parasitic poles, it is
at half of ( u,loopand with four
parasitic poles it is at .B (u,loop. This is because each pole
contributes a certain amount of
delay and when you have multiple poles the delays due to each of
the poles adds up. So, it
effectively constitutes a greater delay.
So, the delay due to each pole should be smaller, if you have to
ensure stability. 6nd this can
be easily related to the first result that we have obtain that
if you have an ideal delay, 6nd if
the delay becomes too much that is .2 times )( u,loop, the
system becomes unstable. 0t is
e8actly, it is pi)- times )(u,loop, which can be appro8imated to
.2 times )(u,loop.
So, the greater the number of poles the higher fre'uency they
have to be if they come to
lower fre'uency you will risk instability. +ow, what we are
interested in amplifier designer is
not merely avoiding instability because it can be ringing a lot,
which dies down, the ringing
dies down and it is still a stable system. That is also not what
we are interested in. What we
are interested in is also wellbehaved system where it does not
ring too much.
+ow, what happens is, you have multiple poles, evaluation of the
step response becomes
difficult. When we had only one e8tra pole it is very easy, we
know the step response of a
secondorder system. 6nd we can classify it into critically
damped, over damped and underdamped and we can easily identify the
condition for which there is no ringing that is it has to
-
8/21/2019 Use of Nyquist plot for Analog IC design
13/17
be critically damped or under damped. +ow, when you go to higher
and higher order systems
this is not the case, the analytical e8pression become too
complicated and it becomes simply
too difficult to judge even stability, or it is even more
difficult to judge when the system is
wellbehaved.
So, what we will do is, we will not evaluate the transfer
function and work with the
polynomials which is very difficult, what we will do is taking
our hint from the ideal delay
case for which we have a solution, and the secondorder case for
which we also have a
solution7 from their we will e8trapolate some conditions for
higher order systems and these
conditions will not be based on calculating polynomial and the
roots and etcetera. 9ecause
that is what is very complicated, it will be based on evaluating
the polynomial for some
sinusoidal fre'uency. That is the evaluating the sinusoidal
steady state response of the loop
gain, because of that it is much easier, and that is the
preferred way of analy*ing negative
feedback systems.
!"efer Slide Time# 1B#-&
Dlosed form e8pression for the step response are too complicated
for higher order systems, so
which basically means that we need an alternative methods for
analysis. 6nd there is an
alternative method, but does not depend on calculating the
denominator polynomial and its
roots and so on, and that is based on the +y'uist criterion. So,
the +y'uist criterion would be
familiar to you from courses on control systems, in this course
we are not going to deal with
-
8/21/2019 Use of Nyquist plot for Analog IC design
14/17
the proof of the +y'uist criterion and so on. 9ut we will just
state the +y'uist criteria and use
it for our purpose which is to be able to design wellbehaved
amplifiers.
!"efer Slide Time# 1#%-&
So, just a start of with, we will take the classical
representation of the feedback amplifier
which also includes the amplifier that we have derived and if
you look at the control system
te8tbooks, this is how it as written. The forward path is
denoted by E and the feedback pathdenoted by H. 6nd for our proto
type case E is nothing but the integrator and H is nothing but
)k ideally. 6nd in reality there will be parasitic poles in
either E or H or both. There will be
e8tra poles in the system. So, this =$)=ias we know as an
e8pression E by plus EH, where
the EH is nothing but the loop gain, as we have seen the loop
gain is something that we used
to 'uantify the amount of negative feedback.
So, the way we do it is by breaking the loop somewhere, applying
a signal in the forward
direction of the loop and see what comes back. ;or instance in
this particular case the we can
break it here, we set the input to $ for evaluation of the loop
gain because we are not
interested in any particular input, but we are only interested
in what comes back around the
loop. So, we can apply some =testhere and what comes back here
we know is minus EH
times =test. So, this EH is defined to be the loop gain, the
minus sign is omitted because we
assumed that we are making a negative feedback amplifier. So, we
e8pect a minus sign, and
that is omitted and EH is the loop gain and as you can see from
this e8pression the gain will
become infinity if EH becomes minus 7 if the loop gain becomes
minus .
-
8/21/2019 Use of Nyquist plot for Analog IC design
15/17
So, the stability criteria usually revolve around the loop gain
and the value of minus , that is
you should not have loop gain to be e'ual to minus . So, how to
avoid it and what to do with
the loop gain that is what the stability criteria work with. So,
in a very crude way we can say
that stability criteria is about avoiding EH being minus , there
is a little more to it than that,
but that e8plains the significance of minus in in the loop
gain.
!"efer Slide Time# %#-$&
+ow, what is the actual definition of stability or instability
rather7 instability means, that
transfer function =$by =iwhich is E by plus EH has some poles in
the right half plane. So,
if this is the s plane, instability means, there are some poles
in this half of the plane in the
right half plane or on the imaginary a8is. So, this includes the
imaginary a8is. +ow, it turns
out that for this, to work out this thing you need to obviously,
calculate the =$by =i and
there will be some denominator polynomial. 4ou have to find out
the root of the denominator
polynomial and see whether they have positive real parts are
not, if they have positive real
parts they will be in the right half plane and the system is
unstable. 9ut that is what you said
was very difficult that is very difficult because you will end
of with very higher polynomial
and for which the roots are not very easy to determine.
So, the alternative is to use the +y'uist criterion which states
the following, So, what you can
do is instead of evaluating E by plus EH and working with the
polynomials you can simply
evaluate EH. 6nd that to not everywhere, but on their imaginary
a8is s j(. This essentially
means that what you are evaluating is the sinusoidal study state
response of the loop gain
-
8/21/2019 Use of Nyquist plot for Analog IC design
16/17
function. s j( corresponds to a sinusoid of fre'uency (. 6nd
E!s&H!s& at s j( corresponds
to the loop gain for a sinusoidal fre'uency of (. So, you can
evaluate E!s&H!s& and plot its
imaginary part versus the real part. So, instead of calculating
the polynomial we simply
calculate E times H for sinusoidal fre'uencies s j( and then
plot the imaginary verus real.
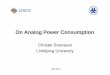
We later go into how this plot e8actly look like, like 0 said
rather vaguely that stability criteria
involved avoiding the loop gain being minus . So, this !, $&
is a critical point in this whole
techni'ue, and what the +y'uist criterion states is that the
plot of imaginary part of the loop
gain verses the real part of the loop gain should not encircle
!, $&. That is the plot can be
something like this and if it is like this for the negative
fre'uencies, it will be the mirror
image. So, in this case it is not enclosing !, $&. We will
make more concrete the definition
of what enclosing means, but in this case you can clearly see
that !, $& is not inside this
picture.
Fn the other hand if the picture looks something like this then
it looks like !, $& is enclosed
by this plot of imaginary part of the loop gain verses real part
of the loop gain which is
evaluated on the j( a8is. So, in this case the system will be
unstable. So, 0 still made some
vague statements, you had to make many more things more precise
which 0 will do, but what
0 like you to do is to first appreciate the advantage of this
particular techni'ue.
So, before if we had to ascertain stability you have to evaluate
this function and evaluate the
denominator polynomial of that and find the roots, see if the
roots are positive real parts. That
is a very difficult thing to do first of all the e8pressions
become very combustion, even for the
baby cases that we took that is you have two identical poles,
you have to do a little bit of
work. +ow, when you have multiple poles and that too not
identical to each other it becomes
very very difficult. 0nstead what is done, is to evaluate only
the loop gain and that too not
everywhere not on a general form, but on the imaginary a8is that
is for sinusoidal input.
So, as you know it is easy to calculate as well as easy to
measure if you are only interested in
the sinusoidal study state response. When you have a system you
can apply a sinusoid see
what comes out and evaluate the magnitude and phase shift of
what comes out compared to
what goes in. So, this +y'uist stability criterion is a way of
ascertaining stability that is
evaluating whether the poles are in the right half plane by
looking at only the loop gain and
this is a tremendous advantages. 6nd that3s why this and the
techni'ues that are sort of
related to this are very widely used.
-
8/21/2019 Use of Nyquist plot for Analog IC design
17/17
"oughly speaking it involves the sinusoidal study state response
of the loop gain and the
critical point of minus , and the intuitive reason for minus
being there is that if the loop
gain e8actly e'uals minus , you will have instability for sure
because = $)=ibecomes infinity.
So, this +y'uist criterion says something about the plot of the
imaginary part of EH verses
real part of EH and make some statement which is e8actly
e'uivalent to the poles being in
the right half plane. >8actly what the statement is, we will
elaborate in the ne8t class and see
with all the details.
Thank you.