Embed Size (px)
Citation preview

Chemical Engineering Science, Vol. 53, No. 17, pp. 3041—3049, 1998( 1998 Elsevier Science Ltd. All rights reserved
Printed in Great BritainPII: S0009–2509(98)00138–9 0009—2509/98/$—See front matter
Use of alternate process variables forenhancing pH control performance
N. R. Lakshmi Narayanan, P. R. Krishnaswamy* and G. P. RangaiahDepartment of Chemical Engineering, National University of Singapore, Singapore 119260
(Received 13 November 1997)
Abstract—In pH control, the process variable that is very often used is pH itself although use ofother alternate variables may provide better performance. In this paper, use of three easilyimplementable process variables (namely, difference in hydrogen and hydroxyl ion concentra-tion g, hydrogen ion concentration C
Hand process pH) are experimentally investigated in the
context of two control strategies, namely, PI control and adaptive nonlinear internal modelcontrol. Experimental results show that, in general, use of g provides superior control perfor-mance. In the case of adaptive nonlinear internal model control, significantly improved controlis obtained with g as the process variable. This improvement is attributed to the reduction inprocess static nonlinearity on account of g. Besides, g can also be easily calculated frommeasured pH for any type of neutralization system. Thus, there is a strong case for usingg instead of pH as the process variable in pH control. ( 1998 Elsevier Science Ltd. All rightsreserved.
Keywords: pH Control; process variable; PI control; adaptive internal model control.
INTRODUCTION
Control of pH, particularly in the neutral range of pHequal to 6—8, has been a difficult and challengingproblem due to time-varying and nonlinear character-istics of pH processes. Part of the problem is due tothe use of measured pH (which is a nonlinear functionof concentration of hydrogen ions) as the processvariable. Several researchers have recommended al-ternate process variables for controlling pH. Theseinclude difference in hydrogen and hydroxyl ion con-centration, g (Goodwin et al., 1982), reaction invariant(Gustafsson and Waller, 1983), strong acid equivalent,½ (Wright and Kravaris, 1991), hydrogen ion concen-tration, C
H(Kulkarni et al., 1991 and Shukla et al.,
1993) and ionic difference (Costello, 1994). Generallyspeaking, these variables modify or reduce the nonlin-earity involved in the pH process. Use of these vari-ables have not been extensively studied and evaluatedexperimentally. Use of ½, reaction invariants andionic difference generally require either on-line es-timation (e.g. ½ estimated via a nominal titrationcurve of the process stream) or concentrationmeasurement of different electrolytes in the inlet/out-let streams. In other words, only when concentrationand composition are known, process variables like ½,reaction invariants and ionic difference may proveuseful. However, in practical industrial applications,
*Corresponding author. Fax: (65)7791936; e-mail:[email protected].
such requirements are difficult to meet. Hence, a pro-cess variable that allows implementation of a givencontrol strategy with only a knowledge of the mea-sured pH would prove attractive. Both C
Hand
g could be considered in this context.Wong et al. (1994) have experimentally studied pH
control using an adaptive nonlinear internal modelstructure and C
Has the process variable. The results
show that use of CH
coupled with adaptation im-proves the robustness of the control system. Earlier,Goodwin et al. (1982) used g in their adaptive controlalgorithm for pH control. However, the potential ofg has not been fully exploited, and pH is still com-monly used as the process variable. Motivation forpreferring g as the process variable comes from thefact that g can be easily calculated from pH for allneutralization systems and in addition g is identical to½ for strong acid—strong base case. The broad objec-tive of the present study, therefore, is to evaluateexperimentally the use of g and C
Hin controlling pH.
The performance of control based on g relative tocontrol based on measured pH is first studied using PIcontrol. Recently, an adaptive internal model control(IMC) strategy based on ½ has been found to be veryeffective through simulation (Lakshmi Narayananet al., 1997). Use of g as the process variable in thiscontrol strategy is tested experimentally and for com-parison, control using C
His also implemented.
EXPERIMENTAL SET-UP
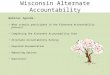
A schematic sketch of the experimental set-up isshown in Fig. 1. It consists of a 1.75 l continuous
3041

Fig. 1. A schematic sketch of the experimental set-up.
stirred tank reactor (CSTR), supply tanks with asso-ciated piping, rotameters, motor-operated controlvalves, pumps, a pH electrode and a meter, signalconditioning modules, an AD/DA card and a per-sonal computer. Two liquid streams, one an influentacid and the other a neutralizing stream, are pumpedinto the CSTR. An overflow arrangement ensuresconstant liquid volume in the CSTR and allows theeffluent to flow out continuously into the drain. Agita-tion is provided in the reactor by means of a mechan-ical stirrer. Three supply tanks, each of 50 l capacity,are used for storing the required acids and the base.Two of the tanks (tanks 1 and 2) contain eithera strong acid of different concentrations or a strongacid and a weak or a mixture of acids. The tanks areconnected through a three-way valve to a pump. Thisenables introduction of a load disturbance either inacid concentration or composition. A rotameter anda control valve (range 20—280 ml/min) are installed oneach of the acid and base lines for monitoring andcontrol. While the rotameters provide visual monitor-ing of the respective flow rates, the acid control valve
helps to introduce step disturbances of desired magni-tude in acid flow whereas the base control valve servesas the final control element. pH at the outlet of theCSTR is monitored by a pH meter through a combi-nation-glass pH electrode. The pH meter output issent to the personal computer via the AD/DA card.The data acquisition and control are carried out on-line by the computer which serves to (i) acquire anddisplay data, (ii) introduce a step disturbance of de-sired magnitude at a given instant, and (iii) computethe controller output according to any of the controllaws employed in this study.
The nominal operating conditions chosen were100 ml/min each for acid and base flow rate and0.06 M each for acid and base concentration. Underthis condition, with the control loop closed, the sys-tem was first brought to its set point pH of 7. Thecontrol objective (acid—base neutralization) couldbe achieved through base flow manipulation (viaa corrective signal from the control computer). Pro-grams for the control strategies were written in C lan-guage. A sampling period of 1 s was employed in all
3042 N. R. Lakshmi Narayanan et al.

Fig. 2. Block diagram of the adaptive IMC structure.
experiments. To minimize the effect of system noise onthe controller performance, a first-order digital filter(Seborg et al., 1989) was introduced in the error calcu-lation:
Ef,n
"aEn#(1!a)E
f,n~1(1)
where Ef,n
is the error after filtering, Ef,n~1
is theprevious filtered error, E
nis the current error, and a is
the weighting factor. The weighting factor chosen was0.5 and this corresponds to a filter time constant of 1 swhich is small compared to the process time constant.
CONTROL STRATEGIES
Two control strategies were implemented. (i) pHcontrol using a PI controller in the feedback loop. Theprocess variable employed was either pH or g, and thecontroller realized was in discretized velocity form. (ii)Adaptive nonlinear IMC strategy. The process vari-ables used were C
Hand g. The model of the process
used in developing the nonlinear IMC controller wasbased on several assumptions such as complete mix-ing in the tank, strong acid—strong base system, negli-gible dead time and valve dynamics. These modellingassumptions are not valid for the experimental pro-cess. However, the nonlinear controller developedcould still be used although the control performancemight not be as good as what could be achievedthrough a more rigorous model.
The adaptive nonlinear IMC strategy with g as theprocess variable is similar to that developed earlier fora monoprotic strong acid and a monohydroxyl strongbase (Lakshmi Narayanan et al., 1997) using the con-cept of strong acid equivalent, ½, and will be present-ed here briefly. The equations developed earlier forstrong acid—strong base neutralization in a CSTR canalso be applied in the present context by simply re-placing ½ with g since ½"C
H!C
OH"g. Thus, the
process model in terms of g is
1
»
dgdt
"F1C
1!F
2C
2!F
Tg. (2)
Using the process model [eq. (2)], the correspond-ing nonlinear IMC controller can be derived for theadaptive control strategy represented in Fig. 2. A
description of this control structure may be foundelsewhere (Lakshmi Narayanan et al., 1997). Deriva-tion of the nonlinear controller involves (i) solving themodel equation for the manipulated variable, F
2, and
(ii) expressing the controlled variable, (g!gs) in terms
of E, an error term defined as E"g4%5!(g
p!g
m).
The resulting controller is
F2"
F1(C
1!g
s!E)!» dE/dt
C2#g
s#E
. (3)
The first derivative of the error (dE/dt) in this control-ler equation could be calculated using first order finitedifference approximation:
dE/dt"(Ef,n
!Ef,n~1
)/¹ (4)
where ¹ is the sampling period.The control strategy also involves simplified ad-
aptation of Huberman and Lumer (1990) which, indiscretized form, is
C1m,n`1
"C1m,n
#e(g4%5!g)¹. (5)
In the ensuing experimental studies, the model, con-troller and adapter (Fig. 2) are given by eqs (2), (3) and(5), respectively, irrespective of whether strong, weakor mixture of acids is employed in the process. Inother words, the proposed control strategy will bemaking use of a simple strong acid—strong base modelto control buffered pH neutralization systems as well.This should be appealing to practitioners whoroutinely face difficult pH nonlinearities in a variety ofchemical and biochemical systems.
Adaptive IMC strategy with CH
as the processvariable was studied by Shukla et al. (1993) and Wonget al. (1994). The block diagram of their strategy is thesame as in Fig. 2 except that (i) C
His used as the
variable of interest instead of g and (ii) pH is used inthe adaptation instead of g. The equations used andother details are available in Shukla et al. (1993).Lakshmi Narayanan et al. (1996) compared the use ofg versus C
Has the process variable in the adaptive
control strategy (Fig. 2) for a variety of disturbancesthrough simulation. The results show that appreciableimprovement in control is achieved when g is usedinstead of C
H. Control based on ½ (Lakshmi
Process variables for enhancing pH control performance 3043

Fig. 3. Performance of PI controller for a 40% step increasein both acid flow and concentration.
Fig. 4. Performance of PI controller for a step change fromstrong acid to a mixture of acids.
Narayanan et al., 1997) produces even better results.However g-based control can be more easily imple-mented and, as will be seen, is also quite effective.
EXPERIMENTAL RESULTS AND DISCUSSION
PI controlControl of pH using a conventional PI controller
was tried first with pH as the process variable andthen with g. The controller was initially tuned basedon open-loop response data, and then fine tuned forbetter performance. The final controller settings wereK
c"0.3%/% and ¹
i"122.4 s. Note that the meas-
ured process variable (pH) was converted into per-centage (based on 0—14 pH,0—100%). Initially, theprocess was maintained at steady state pH of 7 witha strong acid (HNO
3) stream neutralized using
a strong base (NaOH) stream (manipulated variable).Experimental PI responses were obtained in order tocompare the relative performances of pH- and g-based control for two disturbances: (A) 40% increasein both acid flow (from 100 to 140 mlmin~1) andconcentration (from 0.06 to 0.084N) and (B) changingthe feed composition from a strong acid (0.06 M) toa mixture of acids (namely, 0.06 M nitric acid and0.085 M acetic acid in the ratio of 1 : 1). The latter
disturbance affects the nonlinearity of the processsignificantly.
The closed-loop response with pH as the processvariable is shown in Fig. 3 for disturbance A. Boththe process variable and manipulated variable movesare included in this and subsequent figures. Theresponse curve reveals a dead time of about 90 s.This is due to the length of the piping between thethree-way valve and the actual CSTR. Such dead timecan be observed also in other response curves re-ported later. The process pH reached a low value of 2,stayed in that region for some time before returning tothe set point of 7 after 2500 s. The poor control actioncould be due to the simple PI technique being appliedto the nonlinear pH process. The system was alsotested for a higher K
cof 0.4%/%, but the response
was oscillatory. Performance of the control system fordisturbance B involving a weak acid is presented inFig. 4.
PI control with g as the process variable was thentested for the two disturbances. Both the measuredpH and the set point pH were converted into equiva-lent g which were then compared to give the error.The controller settings used earlier (for the processvariable pH) were used here except that K
cwas multi-
plied by a factor that relates g to pH near pH"7. The
3044 N. R. Lakshmi Narayanan et al.

Fig. 5. Performance of adaptive IMC for a 40% step increase in both acid flow and concentration.
factor used was 108,600 which is large due to thestrongly nonlinear character of titration curve atpH"7. The control responses based on g for distur-bances A and B are included in Figs 3 and 4 respec-tively. Results in Fig. 3 indicate that control based onpH is very sluggish, and it can be improved signifi-cantly by changing the variable to g. For disturbanceB also, g-based control is better than that based onpH (Fig. 4). However, the improvement is not verysignificant, and this may be due to the buffering actionof the weak acid present in the disturbance.
Adaptive internal model controlThe adaptive control system architecture (Fig. 2)
based on g was studied experimentally using thestrong acid—strong base (HNO
3—NaOH) system in
the first instance. The required manipulation was esti-mated using the proposed control law [eq. (3)]. Themodel equation [eq. (2)] was solved analytically(McAvoy et al., 1972) assuming piece-wise constantchanges in the manipulated variable and parametersto give
g(t)"g (t!¹) e~T@q#F1,s
C1,s
!F2,s
C2,s
FT(t!¹ )
](1!e~T@q) (6)
where FT(t!¹ )"F
1,4#F
2(t!¹ ) and q"»/F
T(t!¹ ). Before testing the control strategy for thedisturbances, a value for the tuning parameter (e) hadto be selected. This was obtained experimentallyby giving a 40% step change (from 0.06 to 0.085M)in nitric acid concentration and varying e in therange !10 to !50. The response for e"!20 wasfound to be very good, and was therefore used in theadaptation.
To check the performance of the adaptive IMCwith g as the process variable, the system was sub-jected to disturbance A. The response (Fig. 5) showsan excellent disturbance rejection capability by re-turning the system to its set point in about 800 s. Thebase flow (Fig. 5) has one initial sharp peak followingwhich it reached the final value smoothly. As thedisturbance included both flow and concentrationchanges, the initial decrease in pH due to the flowdisturbance and the subsequent drop due to the con-centration change (which involved a lag of about 90 s)are evident. The initial sharp drop in pH is due to theinertia of the control valve and some dead time pres-ent in the actual system which are further accentuatedby the high gain and steep slope of the titration curveat the neutralization point.
Use of CH
(instead of g) in the adaptive IMC strat-egy was tested experimentally for strong acid—strong
Process variables for enhancing pH control performance 3045

Fig. 6. Variation in C1m
for a 40% step increase in both acidflow and concentration.
Fig. 7. Performance of adaptive IMC for a step change fromstrong acid to a mixture of acids.
base by Wong et al. (1994). As this system was notpreviously evaluated for concentration and composi-tion changes, a closed-loop response for disturbanceA was obtained (Fig. 5). The tuning parameter (e) usedwas 300. The process pH reached a low value of about2.7 and recovered to its final steady state after a lapseof over 3000 s. This is four times larger in comparisonto control based on g. Besides the controller outputbecame oscillatory when pH went below 4. This maybe due to the derivative term in the controller and thelogarithmic relation between C
Hand pH. Perfor-
mance results in Fig. 5 clearly reveal that g-basedcontrol is very much superior to that due to C
H. This
could be explained by examining the variations in theadapter parameter C
1mas recorded in Fig. 6. In the
case of CH-based procedure the change in C
1.is
sluggish and oscillatory. In contrast, for g-based con-trol, C
1mchanges quickly and smoothly reaches its
final value in a short time. These differences in theC
1mprofile contribute to a vastly improved control of
pH when g is employed.Figure 7 shows the closed-loop response of the g-
based system for disturbance B. Despite employing aninaccurate model (the model is based on strongacid—strong base), the system performance can be seento be good and control was achieved in about 1500 s.This signifies that even if the process dynamics arepoorly understood, control based on g will be able toachieve good performance. The above experiment wasrepeated for adaptive IMC with C
Has the process
variable. Upon switching the feed to a mixture ofacids, heavy oscillations (Fig. 7) exhibiting a slowdecay were found to set in.
Of the control schemes tested, g-based adaptiveIMC provides significantly better results. To furtherconfirm the performance of this strategy, a completeswitch from strong to a weak acid accompanied bya 40% increase in weak acid concentration was car-ried out. The transient response (Fig. 8) illustrates theeffectiveness of the control system in stabilizing the
process at the set point of 7 within about 2000 s. Itmay be noted that in this case, the static nonlinearity(titration curve) of the process is changed due to thevariation in feed composition. Such changes in pro-cess characteristics, though not accounted for by thecontroller and the process model, are compensated bythe adaptive mechanism. As this feed change repres-ents a severe form of disturbance, a reversal of thisdisturbance (i.e. changing from weak to strong acidaccompanied by a step decrease in acid concentration)was effected at 2500 s. The process pH can be seen torecover and reach its set point quickly (Fig. 8). Thedifference in performance between the introductionand removal of disturbance may be due to the processgoing to the acidic region during the introduction andto the basic region during the removal. As will be seenlater (Fig. 10), g-based process gain is different in thebasic and acidic regions and so the difference in con-trol performance.
One of the attractive features of the IMC strategy isthat it exhibits excellent set point tracking (Williamset al., 1990). As the g-based adaptive strategy containsIMC, the system performance for set point changes
3046 N. R. Lakshmi Narayanan et al.

Fig. 8. Performance of adaptive IMC for a step change fromstrong acid to weak acid with a 40% increase in weak acid
concentration and vice versa.Fig. 9. Performance of adaptive IMC for set point changes
from 7 to 5 and 7 to 9.
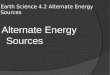
Fig. 10. Titration curves for a weak acid—strong base system.
Process variables for enhancing pH control performance 3047

can be expected to be quite effective. Fig. 9 shows theresponse curves obtained in two separate experimentsfor set point changes from 7 to 9 and from 7 to 5. Theerrors caused by the set point changes were instan-taneously sensed by the controller and some immedi-ate corrections to the base flow were effected. Theprocess pH responses reveal that the settling time foreither set point change is about 150 s with only a mildover/undershoot.
The difference in control system performancesnoted above is due to a given variable affecting thestatic nonlinearity of the neutralization process. Thisis exemplified through the titration curves (Fig. 10)based on g, C
H, ½ and pH for a weak acid (0.015 N
CH3COOH) and a strong base (0.1 N NaOH). As is
well known, pH-based curve is S-shaped with a regionhaving steep slope (i.e. high process gain). TheC
Hcurve has varying slope, from a large absolute
value to almost zero. The curve for ½ reveals thatprocess gain in terms of ½ is nearly constant. Theg-based curve is comparable to that due to ½ in thebasic region (pH'7); however, in the acidic region(pH(7) absolute slope of the curve is much less.Evidently, ½ is the best choice in the sense that itsignificantly reduces process nonlinearity and con-tributes to good control. However, ½ requires eithermeasurement of ions or a knowledge of the initialtitration curve, both of which are difficult to achievein practice. Thus, g provides the most effective controlof those techniques which could be easily imple-mented through a measurement of pH. Besides g isidentical to ½ for strong acid—strong base systems, butit may differ in certain regions if weak acids/bases orbuffers are present.
CONCLUSIONS
In the present study, control of pH by PI andadaptive IMC using different process variables (pH,C
Hand g) is studied in a laboratory scale experimental
set-up. The adaptive control strategy incorporates theconcepts of nonlinear IMC and an on-line adaptation.The IMC controller, derived from a simple strongacid—strong base process model, is used effectively tocontrol even buffered pH systems. Experimental re-sponses obtained for a variety of disturbances showthat g renders enhanced robustness, excellent loadrejection and set point tracking capabilities to theadaptive IMC. Use of C
Hinstead of g, on the other
hand, produces an inferior adaptive IMC. Even con-trol of pH via the ubiquitous PI controller can beimproved by using g instead of pH as the processvariable. For certain disturbances, this improvementcan be significant. To sum up, the difference in hydro-gen and hydroxyl ion concentration, which is easilyobtained from measured pH, can be quite effective inenhancing the control system performance.
NOTATION
C1
inlet acid concentration, NC
2inlet base concentration, N
CH
hydrogen ion concentration, NC
OHhydroxyl ion concentration, N
E error input to the controllerEf
filtered errorF1
acid flow rate, l/minF2
base flow rate, l/minFT
total effluent flow rate, l/mint time, s¹ sampling period, s» volume of CSTR, lX
1total anion concentration of acid, N
X2
total cation concentration of base, N½ strong acid equivalent, N
Greek lettersa filter constant (weighting factor)e tuning parameterg difference in hydrogen and hydroxyl ion
concentrationq time constant
Subscriptsm modeln current valuen#1 future valuen!1 previous valuep processs initial steady stateset set point
REFERENCES
Costello, D. J. (1994) Evaluation of model-based con-trol techniques for a buffered acid-base reactionsystem. ¹rans. Inst. Chem. Engng 72, 47—54.
Goodwin, G. C., McInnis, B. and Long. R. S. (1982)Adaptive control algorithms for waste water treat-ment and pH neutralization. Optimal Control Appl.Meth. 3, 443—459.
Gustafsson, T. K. and Waller, K. V. (1983) Dynamicmodeling and reaction invariant control of pH.Chem. Engng Sci. 38, 389—398.
Huberman, B.A. and Lumer, E. (1990) Dynamics ofadaptive systems. IEEE ¹rans. Circuits Systems37(4), 547—550.
Kulkarni, B. D., Tambe, S. S., Shukla, N. V. andDeshpande, P. B. (1991) Nonlinear pH Control.Chem. Engng Sci. 46, 995—1003.
Lakshmi Narayanan, N.R., Krishnaswamy, P. R.and Rangaiah G. P. (1996) Robust nonlinear con-trol of pH. 7th APPCChE Congress. Taipei, pp.652—657.
Lakshmi Narayanan, N. R., Krishnaswamy, P. R. andRangaiah, G. P. (1997) An adaptive internal modelcontrol strategy for pH neutralization, Chem.Engng Sci. 52, 3067—3074.
McAvoy, T. J., Hsu, E. and Lowenthal, S. (1972)Dynamics of pH in controlled stirred tank reactor,Ind. Engng Chem. Process Des. Dev. 11(1), 68—70.
Seborg, D. E., Edgar, T. F. and Mellichamp, D. A.(1989) Process Dynamics and Control, pp. 539—542.Wiley, New York.
3048 N. R. Lakshmi Narayanan et al.

Shukla, N. V., Deshpande, P. B., Kumar, V. R. andKulkarni, B. D. (1993) Enhancing the robustness ofinternal-model-based nonlinear pH controller.Chem. Engng Sci. 48, 913—920.
Williams, G. L., Rhinehart, R. R. and Riggs, J. B.(1990) In-line process-model-based control ofwastewater pH using dual base injection. Ind.Engng Chem. Res. 29, 1254—1258.
Wong, Y. H., Krishnaswamy, P. R., Teo, W. K.,Kulkarni, B. D. and Deshpande, P. B. (1994)Experimental ap plication of robust nonlinear con-trol law to pH control. Chem. Engng Sci. 49,199—207.
Wright, R. A. and Kravaris, C. (1991) Nonlinear con-trol of pH processes using the strong acid equiva-lent. Ind. Engng Chem. Res. 30, 1561—1572.
Process variables for enhancing pH control performance 3049