Embed Size (px)
Citation preview

p1 ECE 3510 DSpace & First-Order System Lab
University of UtahElectrical & Computer Engineering Department
ECE 3510 Lab 2Introduction to dSpace
Using a First - Order System(Velocity Control of a DC Motor)
A. Stolp, 1/22/08rev, 1/16/13, 1/21/17 Bhavana Mukunda
Note : In future labs I’ll expect you to be able to set up and use the dSpace system with Matlabwithout all the detailed instructions provided in this lab handout. You may want to highlightsections of this handout and keep it for reference.
Objectives! Learn how to setup and use the dSpace equipment and software. ! Learn how to import dSpace data into Matlab for analysis and plotting.! Simplify the DC motor model shown in the appendix of Lab 1 to a first-order model.! Observe the step response of a first-order system and determine the time constant and DC
gain. ! Observe discrepancies from the first-order model.
Equipment and materials from stockroom:! DC Motor (Record the hand-written number on the motor in your lab notebook)! Dual power amplifier (Lunch-box sized aluminum box with handle)! DSpace kit (Plastic bin with an I/O breakout box and cables)If you are in a lab with more than four other groups, you will get the following items from your TAas needed. They are in limited supply. ! Two aluminum wheels with two hex wrenches
DSpace Hardware SetupSelect a workstation with a computer that has thedSPACE hardware and software (on benches alongwest and north walls of MEB 2365). Check theback of the computer to see that it has a connecteras shown at right. Turn OFF (shut down) thecomputer before you plug in the I/O breakoutbox. After the computer has shut down you willconnect the I/O breakout box to the DS1104 PCIcard located on the back of the lab computer andthen reboot and log on. In the meantime, since thecomputer is now running on Microsoft time, readon...
Introduction to dSpaceThe dSpace system is an independent processing and data acquisition system that can implement digital control models. The system includes three main components:
C PCI Development Board (plugged into a PCI slot inside the computer)C I/O Breakout Box connected to that board by a huge black cableC ControlDesk software run on the computer to interface with the development board.

p2 ECE 3510 DSpace & First-Order System Lab
(Some computers also require a USB software protection dongle.) ControlDesk willaccept a “.sdf” file generated by Matlab’s Simulink which will tell it what you want thedevelopment board to do.
The dSPACE PCI development board installed in the lab computer has it’s own “embedded”processor. Before the system can run someone must write some code that can be uploaded tothe this board. This is done by building a Simulink model which defines the inputs and outputsand the operations performed by the board. When the system is running, all of the input-to-output processing is done by the board. All the PC does is command the board to run or stoprunning and handle the data storage and display.
The ControlDesk software loaded on the PC interfaces with the development board. It is usedto convert the Simulink Model to software run by the board as well as create the user interface(called the “Layout”). When the system is running, it collects, stores , and displays data. In3510 labs the user interfaces and most of the software will be created for you. In this first labyou will simply be the user and will not create any software. In later labs you will make someadditions to the pre-written software to implement different types of control.
The “layout” is a user interface area which shows “Instruments”. Instruments are data input,output and recording tools. In ControlDesk, these instruments can be dragged and dropped intothe layout from the Instrument selector tab.
The DS1104 PCI dSpace board together with it’s I/O breakout box provide the following:C 8 analog inputs with 12 or 16 bit analog to digital converters (ADCs)C 8 analog outputs with 12 or 16 bit digital to analog converters (DACs)C 2 position encoder inputsC Onboard independent 64-bit floating point processorC Onboard Slave Digital Signal Processor (DSP)C Onboard memoryC Other I/O capabilities
We will only use a small fraction of these in our labs.
If you have not already done so: Turn OFF the computer before you plug in the I/O br eakoutbox. Connect the I/O breakout box to the DS1104 PCI card located on the back of the labcomputer as shown on page 1. Turn the computer back on, let it boot up and log in. You’llmake connections to the breakout box later.
Software Setup - Simulink ModelCreate a new folder in your Users folder of the C drive or a thumb drive (let’s call it“V_Control_DC_Motor”). This folder MUST be in some personal space of your own. Downloadthe zip file named V_Control_DC_Motor from the lab website (currently:http://www.ece.utah.edu/~ece3510/ –> labs) and save in your new folder. In the zip file, you willfind a Simulink model (ECE3510_lab2.mdl or ECE3510_lab2.slx), a layout file(ECE3510_lab2.lay) and data unpacking code (Mat_Unpack.m). Extract these to your newfolder.
Open the Simulink model on Matlab version R2014a . Note: it is important to use the rightversion of Matlab. The following settings should already be made but it would serve you well toverify them:

p3 ECE 3510 DSpace & First-Order System Lab
! Define sampling time and any other undefined variable in the model as an initial condition:>> File > Model Properties > Callbacks > InitFcn* > verify or enter “Ts=1e-4; nd=30;”, OK.
! Verify the simulation start and stop time (0 to infinity) in the Configuration Parameters in theSimulink toolbar: >> Toolbar > Simulation > Model Configuration Paramete rs > Solver >Simulation time > Start time verify “0.0" & Stop time > verify “inf”. Verify under “Solveroptions” Type: “fixed-step size” and Solver: ode1(Euler).
! Select:(from list in left panel) >> Data Import/Export > Save to workspace > Ensure thatthe “Limit data points to last:” box in unchecked so that the data is not limited to the last fewpoints.
! Select >> Optimization C Uncheck “Block reduction”.C Back in the left panel, expand Optimization > Signals and Parameters > Uncheck
“”Signal storage reuse”
! Back in the left panel, >> Code Generation > System target file > “rti1104.tlc”.C Language “C” to ensure that the code is generated in C language for an RTI1104
platform. C Back in the left panel, expand Code Generation > RTI simulation options > set “Initial
simulation” state to STOP. OK
Once the above settings are in place, in the Matlab command window type“revertInlineParametersOffToR2013b” and press enter. Return to the Simulink modeland type “Ctrl+B ” to build the model. This will generate an sdf file (let’s call it“ECE3510_lab2.sdf”) that is to be uploaded into the dSPACE experiment.
Software Setup - dSPACE ControlDeskFind the ControlDesk icon on the desktop of the lab computer and start theapplication. To create a newexperiment, File > New >Project + ExperimentThis will open a new windowwhich will take you through thenecessary steps to create anew project + experiment.C Give the project a name,
say ECE3510_lab2.C Set the root directory as the
folder you created earlier. >next
C Give the experiment aname, sayECE3510_lab2_exp.
C Check that the “DS1104 R&D Controller Board” is selected. > next

p4 ECE 3510 DSpace & First-Order System Lab
C Open the .sdf variable description file through Import from file… > <your folder>ECE3510_lab2.sdf . For future reference: Note that only one .sdf file can be open in dSPACE at a timeand that by opening or reopening the file you can update variables to their latest values as saved in Simulinkwithout restarting dSPACE. Note that once the experiment is generated, if you have to make a change in theSimulink model, it is important to ensure that the experiment is “offline”. Once the change is made, the model(.sdf file) will have to be rebuilt. The new .sdf file will now have to be uploaded to ControlDesk by selecting theProject tab on the left hand side of the screen, then right click on the .sdf file in this window and click on“Reload Variable Description”.
Once the experiment is generated, a blank layout will be provided. You may close this as youwill be using the layout (ECE3510_lab2.lay) in your folder. On the toolbar (shown below), clickon the Layouting tab and select Import layout. Choose the .lay file provided to you.
Unfortunately, yours will probably not have names like “(%BLOCK%)/(%VARIABLE%)” insteadof “simState”, “Motor_Voltage/Value”, etc.. In the language of dSPACE ControlDesk, the“instruments” in the “layout” are not “attached” to “variables” or “signals”. Here’s what to do:
Mapping the Variables to the LayoutC On the bottom left hand corner of the screen, choose the Variables tab (already done in the
picture above). Select the “ECE3510_lab2.sdf” in the left field. That will show some generalvariables in the center field that can be used to control the layout. Drag-and-drop theSimState variable to the Multi state display (the big red circle in the layout) and again to theON/OFF push button “instruments”.
C Now expand “Model Root” to access the experiment variables, under the ECE3510_lab2.sdffile. All the variables that were defined in the Simulink model should appear here. Now forthe sake of an example, mapping the variable “theta_rad” will be explained. Click on thevariable “theta_rad” under “Model Root”. You will see that there’s now a Gain and an Out1signal listed in the center field. Drag and drop the “Out1" signal into a Display instrument,and also into the y-axis of a plotter (on the little red box).

p5 ECE 3510 DSpace & First-Order System Lab
C Repeat this until your layout looks likethe one below. Map the signals listedas “Out1" or “Value” to the instruments. Note, you won’t get the numbers shownbelow the variables.
Setting up data recordingC On the left hand side of the big screen, click on the
Measurement Configurations tab. C Under Acquisition, expand Platform, right click on
HostService, select “Measure Continuously(Disables Triggers)” and ensure that “Auto Repeat”is unchecked. On choosing to measurecontinuously, Platform Trigger 1 and DurationTrigger 1 will be disabled.
C Right click on HostService again and select“Properties”. On this window, ensure that theSampling period is 0.0001s and that Auto repeat isunchecked, then increase the Downsampling to 20.This makes sure that one sample is collected forevery 20 sampling periods, which in this case is 1sample/2 ms or 500 samples/s.
C Right click on Recorder 1 and select Properties. Find the “Storage information”. Under this section,

p6 ECE 3510 DSpace & First-Order System Lab
check the “Automatic export” box. (You may edit the Automatic export: file name and data willbe saved with the name you give and three digit count as suffix. We’ll just leave it as “exp1".) C In the Automatic export: folder line, change the directory to your folder. (Use the browse
button.)C In the Automatic export: file type line, make sure to change the file type to .mat.C Check the “Automatic save dialog” box.C Under the Start Condition in the recorder properties, check the “Use start trigger” box. This
will allow you to set a trigger rule for which the recording would commence. C To set a trigger rule, click on the browse button and then, in the “Edit trigger rules” window,
on the bottom left hand side, click on “Add”. This will add a trigger rule named “Trigger Rule1”. You will format this on the right hand side of this window.
C Ensure that the radio button is set to “Custom condition”. Under this, there is a slot with abrowse button.
C Click on the browse button and in the list of variables for the main .sdf file, choose SimStateand click on “OK”.
C In the drop down list to the right, select “>” symbol and enter “1” in the right most slot. Onceyour trigger rule is formatted, click on “Add” under these slots. Confirm this setting byclicking on “OK” again in the bottom right corner of the window.
C You are not likely to need a Trigger delay, so let it remain zero. But, if on examining yourdata, you realize that the data should have started to record a little earlier, entering “-1”, “-2”or “-3” for the trigger delay should be sufficient. This will ensure that the data will berecorded 1, 2 or 3 seconds before the trigger is invoked.
C Your data capture settings are now complete. NOTE: You cannot rename the file aftersaving or Mat_Unpack won't work.

p7 ECE 3510 DSpace & First-Order System Lab
Hardware SetupC Get a BNC-to-BNC
cable (hanging inthe lab). Connectit from the I/O boxDACH1 (D to A,CH1) to one of thedual amplifier’sinputs. Plug in theamplifier and turn iton (two switches). Hook a voltmeter tothe red and blackoutput terminals ofthe amplifier (on thesame side as yourinput). Now you’llcheck to see if youcan get an output.
C On the computer screen, you will first engage the layout by clicking on the “Go Online” buttonand then engage the plotters by clicking on “Start Measuring”. Then you can turn theexperiment ON by clicking on the ON button on the SimState instrument. You will notice thatthe LED will change from RED to GREEN. On the layout, you will also find a numeric inputinstrument mapped with Motor_Voltage. Increase this to 10 V, either by clicking on thearrows or by simply typing in the number into the instrument. You should be able tomeasure a DC voltage of 10 V at the red and black terminals of the amplifier. (If youmeasure the input voltage to the amplifier you would only see about 2V. The amplifier has avoltage gain of 5, but we don’t much care since the instrument has been calibrated toaccount for that.) The red and black outputs of the amplifier will be connected to the red andblack motor leads in a moment, but not just yet.
C First connect the encoder input cable (found in the dSpace kit) from the motor encoder to the “INC1” encoder port of the I/O breakout box. Check the operation of the encoder bymanually spinning the motor and noting a change in encoder position in the layout window(computer screen). Note that you can only see all these changes when the layout isengaged online and the experiment is ON (SimState).
C Reduce the Motor_Voltage to 0 and click the OFF button on SimState to stop theexperiment. Also click on “Go Offline” button on the toolbar to disengage the layout. Finishhooking up the system by attaching red and black leads from the amplifier to the motor.
C Go online, engage the plotters and click on the ON button on SimState and change themotor voltage up and down to get a feel for how the system drives the motor. Also, note thevalues and graphs of the interface. Reduce the voltage to 0 and click “OFF” when done.
Draw a schematic or block diagram of the system in your notebook and writeup a little about thehookup and function.
Experiment

p8 ECE 3510 DSpace & First-Order System Lab
P ss
V s
k
s a( )
( )
( )= =
+ω
τ = 1
a
Pk
a( )0 =
V sv
s( ) = 0
ω τ( ) ( )/tk
av e t= − −
0 1
ω( )∞ = k
av0
θ( )
( ) ( ) ( )
s
V s
K
JL s JR B L s B R K K sT
a a m a m a T V
=+ + + +3 2
IntroductionIn the appendix of Lab 1 the transfer function of a DC permanent-magnet motor was found as:
We are going to consider the output to be angular velocity rather than angular position.Furthermore, we are going to neglect La , that is, consider it to be 0. In your notebook, show thatleads to a transfer function of this form:
Also express k and a in terms of J, Ra , Bm , KT , and KV . This is a first-order transfer function. The pole of this system is at -a and the time constant of the system is:
The DC gain of the system is:
Our input will be a step voltage:
And, finally, show (by partial fraction expansion)that the step response in the time domain is:
Notice that the steady-state output is:
That is, the DC gain (k/a) times the input voltage (v0). In other words, the DC gain relates theeventual output shaft speed to a given the input voltage. Notice that since the DC gain relates aspeed to a voltage, it will have units, like (rad/sec)/V. It is not the V/V type gain factor that youare used to other classes.
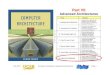
A typical first-order response is shown atright. Notice that the initial slope is 1/τ . Also notice that the curve reaches 63% ofit’s final value in one time constant.

p9 ECE 3510 DSpace & First-Order System Lab
Step ResonseNow you’re all set up to apply voltages to the motor and record data in a format that can later beimported into Matlab. The “Motor_Voltage” input in the layout window will set he voltage leveland data will be captured at 500 samples/sec or one sample every 2 msec.
At the risk of stating the patently obvious... Caution, each time you run the following experimentthe motor will run. Keep fingers, hair, and loose watches, jewelry, etc. away from the shaft,coupler, and/or wheels.
Do the following:C To capture the data, with the SimState OFF, set the voltage to 25 V, in the Measurement
Configurations tab, click on Recorder 1 and then, click on the “Start Triggered Recording”(second button from the left on the recorder). This will ensure that the recorder won’t startrecording until the trigger is invoked. Then push the ON button on the SimState and themotor will immediately start rotating and the data will be recorded for a step response. Oncethe data is recorded, for say about 5-6 seconds, click on the Stop Recording button, reducethe voltage, click the “OFF button on the SimState and go offline. Note that if you’d like torecord the data for a specific period of time, you can do that from the Recorder 1 propertiesunder Stop condition. Select Type > TimeLimit and for Time limit specify the period of timefor capturing data. The number you enter will be in seconds.
C To be extra safe, temporally disconnect one of the wires to the motor. Remove the couplerfrom the motor shaft and replace it with one of the aluminum wheels. You may need to getthe hex wrenches and a wheel from your TA. Note: It is always a good idea to check that theexperiment is OFF and offline before making any adjustments to the hardware or software sothat the motor won’t start unexpectedly. (Of course it can’t with the wire disconnected.) Reconnect the wire.
C Capture the 25-V step response with the greater inertia of this wheel and record the name ofthe data file.
C Replace the wheel with the other size wheel and note which is which so that you can laterseparate your data for the coupler-only, small wheel, and large wheel.
C Capture the 25-V step response with the inertia of this new wheel and record the name ofthe data file.
C Describe the procedures on your lab notebook.
C Reinstall the coupler.
Data AnalysisUsing Mat_Unpack to import the data into MatlabDSpace generates .mat file when it saves data to a file. The structure uses a “dot” conventionto differentiate elements in the structure (ie.. name.field.data). This can be somewhat tedious towork with when you want to perform analysis and manipulation in Matlab®, so a customMatlab® script called Mat_Unpack.m is provided to unpack the .mat data structure. Mat_Unpack is designed to list the contents of the structure and unpack the data to variablesyou name for use in the workspace.

p10 ECE 3510 DSpace & First-Order System Lab
To use Mat_Unpack:C Make sure the file you’re working with is in the
current working directory for Matlab®.C Make sure Mat_Unpack.m is in the same
directory as the file or in the /work directory onthe machine you're using.
C Type Mat_Unpack to initialize the script in thecommand window of Matlab®
C Type the name of the file but do not includethe .mat extension. You will be presented witha prompt that gives information about the datain the structure. NOTE: if you changed thefilename after saving it the script will fail.
C The script will ask for a workspace name forthe first variable or variable 1 from the list ofnames. You can use any valid Matlab®variable name just remember where youstored what. The script will have you name allof the data signals
C The program will ask you to give a name forthe time data.
C Finally all the variables in the workspace arelisted. You will notice that along with thevariable you created is a struct with the nameof your file. That struct is the unpacked data.
C Now you can plot the data by using standardMatlab methods ( ie..plot(time,data,'proporties'))
NOTE: The Matlab figure shows the renamed variables. It isimportant to note that the signals added to plotters and theones used in trigger rules are automatically recorded. Hereyou can see two unmarked variables that were randomlynamed as they aren’t of any use. They are only recorded toovercome a glitch. One is the SimState variable used in thetrigger customization and the other is a variable called“CurrentTime” that can be found in the same variable list asSimState. These variables were selected in the variableswindow, and dragged-and-dropped into the list of recordedvariables to resolve an issue with the size of the time vectorrecorded. You will not need to do this unless you face thesame issue, which rarely happens. You can see that thevariables are listed as HostService or OnChange. Anyvariable that you need to plot should be recorded by theHostService with the sample time and downsamplingspecified, to ensure the vectors are of the same size as thedefault time vector. If you ever need to change the mode of avariable between HostService and OnChange, you will need todo it immediately after mapping that specific variable or, onceall the variables are mapped to the right instruments, save

p11 ECE 3510 DSpace & First-Order System Lab
your progress on the layout, close dSPACE, restart dSPACE and open your project andexperiment. Once it’s open, you should be able to check the box for the right mode. This comesin handy if you wanted to record the Motor_Voltage that was manually changes and theSimState that was turned ON and OFF during the experiment.
Computations to be done using the data setsCheck the time data vector you have in Matlab® to see if it is the same length as the positionand velocity vectors. If not, you may have to create the time vector starting at time = 0 and theknowledge that the data points are 2 ms apart in time.
Plot the velocity data verses time. Plot the response over 0.05 sec (50ms), and compare it to anexponential curve. The shape should be comparable.
Determine the steady-state velocity by taking the mean of the velocity over a period of timewhere it is (approximately) constant. You can do this on the plot, or mathematically in Matlab.
Obtain an estimate of the time constant based on the time it takes for the output to reach 63%of its steady-state value.
From the results, calculate the values of the DC gain in both (rad/sec)/V and rpm/V. Calculatethe parameters k and a of the system.
Repeat these plots and calculations for each inertial case (coupler, small wheel, large wheel). Ifyou can put all three curves on the same plot, that would make them very easy to compare. Compare the plots and numbers. Discuss the effects of added inertia on the model parameters.
Inaccuracy of the first-order modelLook back at your plots and find where they are not a simple exponential curve. How can theeffects of the motor inductance, which we neglected, account for the discrepancy? Nevertheless, the first-order model is not too bad.
A second-order model, rather than first-order, would result and would more accurately reflect thebehavior of the motor. We will find the parameters of such a model in a later lab. In practicehowever, any model, no matter how high-order or how detailed it is, is only an approximation ofthe real system.
Nonlinear InaccuracyThe Amplifier used in this lab cannot supply an infinite amount of current. This is a nonlinearity. If the current is limited, then the torque available to accelerate the motor will also be limited. Ifthe limit is a constant value, then the acceleration will be constant. This could show up as aconstant-slope section in the velocity “curve”. Check your curves for this effect.
ConclusionCheck off before tearing apart your system or leaving the lab. Make sure the experiment andlayout are OFF and offline respectively, and save your progress. Turn off the computer beforeunplugging the IO breakout box. If you’ve done a good job above comparing the plots,discussing the effects of inertia and the limitations of the first-order model, your conclusionshere can be pretty slim. You should at least write about how you did or did not meet theobjectives of the lab.