Embed Size (px)
Citation preview

IS IT ECONOMICAL TO IGNORE THE DRIVER?A CASE STUDY ON MULTIMODE COMBUSTION
Sandro P. Nuesch∗Anna G. Stefanopoulou
University of MichiganAnn Arbor, Michigan 48109
Email: [email protected]
ABSTRACTIgnoring the driver’s torque command can be beneficial for
fuel economy, especially if it leads to extended residence time atefficient operating conditions. We answered this question for aparticular engine, which allows mode switches between spark ig-nition (SI) and homogeneous charge compression ignition (HCCI)combustion. When operating such a multimode combustion en-gine it might be required to defer a load command outside thefeasible regime of one combustion mode until a mode switch isaccomplished. The resulting delays in engine torque responsemight negatively affect vehicle performance and drivability. Inthis paper a longitudinal vehicle model is presented, which incor-porates dynamics associated with SI/HCCI mode switching. Twoexemplary supervisory control strategies were evaluated in termsof fuel economy and torque behavior. It was seen that the dura-tion of a mode switch may be short enough to avoid substantialimpairment in torque response. This in turn would lead to the op-portunity of purposefully ignoring the driver command. Thereby,the residence time in the beneficial HCCI combustion regimeis prolonged and fuel-expensive mode switching avoided. Theresult is a trade-off between torque deviation and improvementsin fuel economy. Finally, based on this trade-off the supervisorycontrol strategy relying on a short-term prediction of engine loadwas seen to achieve similar fuel economy with slightly improvedtorque response than a strategy without prediction.
∗Address all correspondence to this author.
1 INTRODUCTIONAdvanced combustion modes show great potential to im-
prove vehicle fuel economy. One possible implementation ofsuch combustion modes are multimode combustion engines ap-plying spark ignition (SI) and homogeneous charge compressionignition (HCCI) combustion [1]. HCCI combustion improvesengine efficiency, is, however, limited to low loads [2]. This dis-advantage is resolved by switching to the less efficient SI mode ifthe driver requests a load outside HCCI’s limits.
A supervisory control strategy is required which makes thedecision, when a mode switch should be attempted. In [3] in-stantaneous mode switches are assumed with every visitation of
1000 1500 2000 2500 3000 3500
0
50
100
150
Engine speed ωe
EnginetorqueTe
Tim
e (F
TP
−7
5)
[%]
0.0001
0.001
0.01
0.1
1
10
1000 1500 2000 2500 3000 3500
Engine speed ωe
SI
SI
HCCI
Tolerance Regime
Tolerance Regime
∆T
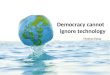
Figure 1: Left: Map of frequently visited operating points duringthe FTP-75 drive cycle. Right: Boundary of the feasible operatingregime of naturally aspirated HCCI combustion (solid black). InHCCI combustion, the tolerance regime (dashed red) representsthe load/speed conditions for which a deviation between desiredtorque and actual engine torque is accepted.
DSCC2015-9875
1 Copyright © 2015 by ASME
Proceedings of the ASME 2015 Dynamic Systems and Control Conference DSCC2015
October 28-30, 2015, Columbus, Ohio, USA
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 11/06/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use

the feasible HCCI operating regime being an actual residence inHCCI combustion mode. Both [1, 4] switch combustion modesbased on the state of the three-way catalyst, thereby taking intoaccount its temperature [1] and oxygen storage level [4]. Theintegration of a multimode combustion in a hybrid electric vehicleis discussed in [5, 6] with a focus on the power and torque splitdecisions. However, research on SI-HCCI mode switching hasshown that mode switches require a certain amount of time andincur a penalty in fuel [7–9]. Therefore not every visitation ofthe feasible HCCI operating regime is long enough to result ina benefit for overall fuel economy [10]. Previous work [11] hasshown that the large number of combustion mode switches duringa drive cycle leads to a short consecutive residence time in HCCI.This in turn results in an accumulation of the associated penaltieswith a negative impact on overall fuel economy.
In addition, HCCI’s load limitations might lead to poten-tial drivability issues. If the driver demands a load far outsideHCCI’s operating regime, the engine torque response needs to bedelayed while the combustion mode is switched from HCCI toSI. Drivability is a subjective measure of vehicle performance asperceived by the driver. Attempts to find an objective drivabilitymeasure can be found in [12–14]. A potential measure to quantifythe impact of independent events such as mode switches might bejerk, i.e., the derivative of the vehicle’s longitudinal acceleration.
This paper discusses the potential increase in residence timein HCCI mode by allowing the engine to temporarily ignore thetorque desired by the driver. Thereby small excursions from theHCCI regime are avoided and the number of costly mode switchesreduced. The frequently visited engine operating points based onFTP-75 drive cycle simulation and the feasible operating regimeof HCCI are shown in Fig. 1. In turn, however, this strategyinherently leads to periods, in which the actual engine torquedeviates from what is desired by the driver. Therefore a trade-offcan be expected between fuel economy benefits and drivability.A longitudinal vehicle model is introduced which takes into ac-count the delays and penalties associated with combustion modeswitching. The model is presented in Sec. 2. In Sec. 3 two su-pervisory control strategies are presented and evaluated in drivecycle simulations in Sec. 4.
2 MODELIn the following section the delays and supervisory control of
combustion mode switching are incorporated into a vehicle model.In [15] a methodology is presented, modeling the combustionmode switch dynamics in form of a finite state machine. In [9] themodel was parameterized with experimental mode switch data.Based on the inputs engine speed ωe and torque Te the currentcombustion mode M was determined. Therefore the model wasrun in a post-processing scheme without any influence on thedynamic behavior of the vehicle. Here the combustion modeswitch dynamics are integrated into a longitudinal vehicle and
Clutch
torque
Brake pedal
Clutch pedal
Tcmd
Gear
v
ECU
TeAccel.
pedal
Driver
Ref. velocity
Ref. gear
Clutch state
Vehicle
Tire
forcesDrive-
trainEngine
BSFC
Maps
uphase
/ uswitch
M
Fuel
EconomyPost-Processed
ωe
Figure 2: Overview of vehicle model block diagram.
driver model. A block diagram of the model is shown in Fig. 2.Depending on current combustion mode M and with Te and ωesteady-state maps and penalty parameters are used to calculatethe fuel mass flow.
2.1 EngineThe response of actual engine torque Te to a commanded
torque Tcmd from the ECU is modeled as a first order systemwith time constant τe = 90ms, identified with throttle snap exper-iments:
Te =1τe(Tcmd−Te). (1)
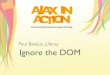
The SI-HCCI combustion mode switch is modeled using afinite state machine with twelve finite states M, shown in Fig. 3.The applied mode switch control strategy relies on a two-stagecam switching mechanism. Finite states utilizing a high lift camposition (bottom half) can be characterized as SI combustionmodes, while states at a low lift cam position (top half) as HCCImodes. Each finite state exhibits a minimum duration in secondsor engine cycles until a transition to the next state is feasible.
Control inputs to the combustion mode switch model areuphase and uswitch, originating from the supervisory controller inthe engine control unit (ECU). They can be imagined as com-mands from the supervisory control to the underlying mode switchcontroller, not discussed in this paper, which takes care of theactual mode switch tasks, such as air path and combustion controlas well as misfire prevention. The mode switch preparation, i.e.,phasing the cams between nominal and switching conditions, iscontrolled by uphase. If uphase = 1 the cams are phased to pre-pare the mode switch from SI to HCCI, uphase = 0 represents theother direction, from HCCI to SI mode. The second input uswitchcontrols the cam switch command, the point of no return duringmode switch. If uswitch = 1 the command to switch from high tolow lift will be sent as soon as the cams reach their target location;vice versa if uswitch = 0, which represents a cam switch from lowto high lift.
2 Copyright © 2015 by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 11/06/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use

Direction change
High-Low LiftCam Switch
Low-High LiftCam Switch
Direction change
Duration: 250 ms
Fuel: 1.02 x SI
Fuel: SI
Duration: 1 engine cycleFuel: 1.15 x SI
Duration: 2 engine cyclesFuel: HCCI
Duration: 2 engine cyclesFuel: HCCI
Duration: 200 ms
Fuel: HCCI
Fuel: HCCI
Duration: 1 engine cycleFuel: 1.4 x SI
Duration: 2 engine cyclesFuel: 1.08 x SI
Duration: 250 msFuel: 1.03 x SI
[if uswitch= 1]
[if uphase= 1]
[if uphase= 1]
[if uphase= 0]
[if uphase= 0]
[if uphase= 1]
[if uphase= 0]
[if uswitch= 0]
[if uphase= 1][if uphase= 0] HCCI
SI
Increase NVOand Unthrottle
Phase Camsto Nominal SI
SI→
HC
CIH
CC
I→SI
Phase Camsto Switching Point
Send CamSwitch Command
Phase Camsto Nominal HCCI
Misfire Prevention
Throttle
Send CamSwitch Command
Figure 3: Finite state machine representing mode switch betweenSI and HCCI combustion. Durations and fuel penalties associ-ated with each finite state are shown on the side. Inputs of thesupervisory controller are uphase and uswitch.
Torque Command
Feed through desired torque: Tcmd
= Tdes
SI Mode
if M = SIif M = HCCI
HCCI Mode
if Rdes
= HCCI Desired: HCCIFeed through desired torque: T
cmd = T
des
if Rdes
= SI Desired: SILimit torque: T
cmd = T
HCCI,limit
if Rdes
= HCCI if Rdes
= SI
HCCI
Boundaries
ωe
Rdes
THCCI,limit
Tcmd
M
Tdes
SI-HCCI
Mode Switch
Engine
Dynamics
Supervisor
Ract u
phase
uswitch
Te
ECU Engine
Figure 4: Block diagram of the ECU model and its interactionwith combustion mode switch.
Note that the mode switch controller is assumed to performa torque-neutral switch, i.e., without any substantial deviationsfrom reference torque. Therefore the potential impact of torquefluctuations occurring during the mode switch are neglected.
2.2 Engine Control Unit (ECU)
The supervisory controller of the combustion mode switchesis located within the ECU model, shown in Fig. 4. Based oncurrent engine operating conditions the supervisory strategy com-putes the mode switch commands uphase and uswitch. Two differ-ent control strategies are presented in Sec. 3. For each engineload/speed condition the function Ract(ωe,Te) determines if the
engine operates within the feasible range of HCCI combustion:
Ract(ωe,Te) =
HCCI ωHCCI,min ≤ ωe ≤ ωHCCI,max AND . . .
THCCI,min(ωe)≤ Te ≤ THCCI,max(ωe)
SI ELSE.(2)
The function Rdes(ωe,Tdes,∆T ) is similar and represents theregime the desired torque lies in:
Rdes(ωe,Tdes,∆T )=
HCCI ωHCCI,min ≤ ωe ≤ ωHCCI,max . . .
AND THCCI,min(ωe)−∆T ≤ Tdes
AND Tdes ≤ THCCI,max(ωe)+∆TSI ELSE.
(3)The HCCI operating regime is extended towards higher and lowerloads using parameter ∆T to create a tolerance regime betweenSI and HCCI mode, shown in Fig. 1. If in M = HCCI mode,excursions of Tdes into the tolerance bands are ignored and nocombustion mode switch is triggered. The operating regimes ofactual and desired load are distinguished since the multimodeoperation leads to certain constraints in load command, as shownin the bottom right of Fig. 4. If the engine operates in M = SImode the entire load range of the engine is available. Thereforecommanded torque is equal to desired torque:
Tcmd = Tdes. (4)
However, in M = HCCI mode the torque is limited due to highpressure rise rates and combustion instabilities. If the driver de-sires a load outside the feasible regime of HCCI, this load cannotbe achieved before a mode switch from HCCI to SI combustionhas been conducted. Therefore the load command Tcmd needs tobe delayed. As can be seen in Fig. 4, here the Tcmd follows Tdesuntil the HCCI load limit THCCI,limit is reached. This can eitherbe the upper or the lower boundary. The command Tcmd remainsat this value until either the SI mode is reached or Tdes returns tothe HCCI regime.
Tcmd =
{Tdes Rdes(ωe,Tdes,0) = HCCITHCCI,limit Rdes(ωe,Tdes,0) = SI
(5)
2.3 VehicleThe applied longitudinal vehicle model was parameterized
for a stock Cadillac CTS 2009 with manual transmission. Themodel is briefly described and validated in [11]. It considers thelock-up state of the clutch and includes the three following maindynamic states: Vehicle speed v, rotational speed of the wheels,and engine speed ωe.
3 Copyright © 2015 by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 11/06/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use

3 CONTROL STRATEGIESIn the following section, two different supervisory mode
switch control strategies are introduced. The first strategy makesthe mode switch decision depending on the current states only.The second strategy applies a prediction in engine torque andspeed to anticipate the switch.
3.1 Strategy 1: No Prediction (NoP)The first strategy NoP is solely based on the current actual
and desired combustion regimes, Ract and Rdes, respectively. InSI mode the phasing of the cams is initiated, using uphase, as soonas Rdes(ωe,Tdes,0) = HCCI. As can be seen in Fig. 3 the modeswitch direction can be changed and the cam movement reversedto nominal SI conditions in case the desired load exits the HCCIregime again.
uphase =
{1 Rdes(ωe,Tdes,0) = HCCI0 ELSE
(6)
Once the engine torque Te enters the feasible HCCI combustionregime uswitch = 1 is commanded:
uswitch =
{1 Ract(ωe,Te) = HCCI0 ELSE.
(7)
At this point the cam switch command will be sent as soon as thecams reach their switching position.
In M = HCCI mode the mode switch is initiated as soon asthe desired torque exits the HCCI regime.
uphase =
{0 Rdes(ωe,Tdes,0) = SI1 ELSE
(8)
uswitch =
{0 Rdes(ωe,Tdes,∆T ) = SI1 ELSE
(9)
Since this strategy only acts based on the current engine operat-ing conditions, a time delay is incurred upon entering the HCCIregime until the mode switch to HCCI combustion is completed.This therefore reduces the potential residence time in the benefi-cial HCCI combustion. The opposite is the case during the switchfrom HCCI to SI combustion, where the residence in HCCI modeis prolonged. However, this is done by temporarily saturating theload command Tcmd at HCCI load boundary, leading to potentialdrivability issues. Finally, it is likely that some visitations of theHCCI operating regimes are very short. Therefore this strategymight allow mode switches which are actually harmful for overallfuel economy, since short stays cannot be predicted.
3.2 Strategy 2: Predict by Linear Extrapolation (LiP)In order to mitigate the two potential problems of the first
control strategy, in the strategy LiP the controller attempts topredict the short-term behavior of engine load and speed. Theprediction is used to anticipate entries and exits of the feasibleHCCI regime, thereby preparing the mode switches beforehandand mitigating associated delays. In addition the prediction canbe used to prevent mode switches during very short visitations ofthe HCCI operating regime. In [10] different prediction methodswere tested on drive cycle measurements and they exhibited pooraccuracy in predicting the duration of future visitations of theHCCI regime. However, they were able to correctly identify veryshort and very long durations, which is applied in this strategy.The prediction method used here applies linear least squares tothe h most recent values of desired load and engine speed,
Tkhist =
(T k−h
des , . . . ,T k−2des ,T k−1
des ,T kdes
)T(10)
ωωωkhist =
(ω
k−he , . . . ,ωk−2
e ,ωk−1e ,ωk
e
)T(11)
using ts ·h = 0.5s with sampling time ts. The more recent valuesare weighted more heavily by applying
W = diag(
e−35·h·ts ,e−35·(h−1)·ts , . . . ,e−35·ts ,1). (12)
The slopes fT and fω for linear polynomial extrapolations ofdesired engine torque and speed, respectively, are found by
A =−ts · (h,h−1, . . . ,0)T (13)
A∗ = AT ·W ·A (14)
b∗ = AT ·W (15)
Tkdes = T k
des · (1, . . . ,1)T (16)
ωωωke = ω
ke · (1, . . . ,1)
T (17)
fT =1
A∗·b∗ · (Tk
hist −Tkdes) (18)
fω =1
A∗·b∗ · (ωωωk
hist −ωωωkdes). (19)
Desired engine load and speed are predicted over a horizon Hwith ts ·H = 1.5s, leading to vectors
Tkdes = Tk
des + fT · ts · (1, . . . ,H)T (20)
=(
T k+1des , T k+2
des , ..., T k+Hdes
)T(21)
ωωωke = ωωω
ke + fω · ts · (1, . . . ,H)T (22)
=(
ωk+1e , ωk+2
e , ..., ωk+He
)T. (23)
4 Copyright © 2015 by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 11/06/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use

To predict the actual engine torque the discrete time first orderengine dynamics are used
T k+ie =
(1− ts
τe
)i−1
+tsτe·
i
∑j=1
(1− ts
τe
)i−1− j
· T k+ jdes (24)
with i = {1, ...,H}
leading to the prediction of actual engine torque
Tke =
(T k+1
e , ...T k+H−1e , T k+H
e
)T. (25)
From prediction vectors Tkdes, Tk
e, and ωωωke the crossing times
of the HCCI operating regime can be calculate. The predictedduration until entry of the HCCI regime is denoted τEntry:
jEntry = min(
i ∈ (1,H) | Ract(ωk+ie , T k+i
e ) = HCCI)
(26)
τEntry = jEntry · ts. (27)
The predicted durations until actual torque and desired torque exitthe HCCI regime are denoted τExit,act and τExit,des, respectively:
jExit,act = max(
i ∈ (1,H) | Ract(ωk+ie , T k+i
e ) = HCCI)
(28)
τExit,act = jExit,act · ts (29)
jExit,des = max(
i ∈ (1,H) | Rdes(ωk+ie , T k+i
des ,∆T ) = HCCI)(30)
τExit,des = jExit,des · ts. (31)
The potential visitation duration of the HCCI regime is τStay:
τStay = τExit,act − τEntry. (32)
These durations are used to schedule the combustion modeswitches. In SI combustion the mode switch to HCCI modeis prepared as soon as τEntry is smaller than the time requirementto phase the cams. Due to the constraints of the variable valveactuation it requires 250 ms to phase to cams from nominal SIto switching conditions. In addition it requires about one enginecycle to process the cam switching command. However, thiscommand can already be sent beforehand to reduce the overallswitching duration, leading to the following condition for uphase:
uphase =
{1 τEntry < 250ms− 4π
ωeAND τStay > 0.2s
0 ELSE.(33)
40.2
40.4
40.6
v[km/h]
Reference Velocity
0.06
0.07
0.08
Jerk[m
/s3]
10
15
20
Te[N
m]
Tde s
THCCI ,min
SI
NoP
LiP
PeP
1855
1860
1865
ωe[R
PM]
0
0.5
1
1.5
τ[s]
Entry
Stay
0
1
0
1
931.4 931.6 931.8 932SI
Phase
Cmd
Switch
Phase
HCCIR ins t
Time [s]931.4 931.6 931.8 932
0.35
0.4
0.45
0.5
m f , ins t
mf[g/s]
Time [s]
uphase
uswitch
Figure 5: Exemplary SI-HCCI mode switch during the FTP75drive cycle. SI-only (solid black) and strategies NoP withoutany prediction (dashed blue), LiP with linear extrapolation (dash-dotted red), and PeP with perfect prediction (dotted green).
As can be seen, in addition the mode switch is only prepared if thevisitation duration τStay is predicted to be of a certain minimum.
uswitch =
{1 Ract(ωe,Te) = HCCI AND τStay > 0.1s0 ELSE
(34)
In HCCI combustion the mode switch is prepared in a waythat allows a cam switch as soon as Tdes exits the feasible regime.
uphase =
{0 τExit,des < 200ms− 4π
ωe
1 ELSE(35)
uswitch =
{0 Rdes(ωe,Tdes,∆T ) = SI1 ELSE
(36)
The strategies are compared to the best possible case, referredto as strategy PeP, in which perfect knowledge of the actual anddesired torque and engine speed trajectories in a SI-only engineis assumed:
5 Copyright © 2015 by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 11/06/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use

39.6
39.8
40
40.2
v[km/h]
Reference Velocity
−0.15
−0.1
−0.05
0
Jerk[m
/s3]
12
14
16
18
20
Te[N
m]
Tde s
THCCI ,min
SI
NoP
LiP
PeP
1840
1845
1850
ωe[R
PM]
0
0.1
0.2
0.3
0.4
τExit[s]
0
1
0
1
933.6 933.8 934 934.2 934.4SI
Phase
Switch
Cmd
Phase
HCCIR ins t
Time [s]933.6 933.8 934 934.2 934.4
0.4
0.5
0.6
m f , ins t
mf[g/s]
Time [s]
uphase
uswitch
Figure 6: Exemplary HCCI-SI mode switch during the FTP75drive cycle. SI-only in solid black and strategies NoP withoutany prediction (dashed blue), LiP with linear extrapolation (dash-dotted red), and PeP with perfect prediction (dotted green).
Tkdes =
(T k+1
des,SI , . . . ,Tk+H−1
des,SI ,T k+Hdes,SI
)T(37)
Tke =
(T k+1
e,SI , . . . ,Tk+H−1
e,SI ,T k+He,SI
)T(38)
ωωωke =
(ω
k+1e,SI , . . . ,ω
k+H−1e,SI ,ωk+H
e,SI
)T. (39)
Note that all these trajectories will still differ from the multimodeengine results, since they are not subject to the mode switchingdelays. However, they still allow a very accurate prediction ofτEntry, τExit,act , and τExit,des as long as ∆T is small.
4 DRIVE CYCLE SIMULATIONThe two supervisory control strategies were evaluated during
the FTP75 cycle. They are compared with three cases: An SI-onlycase, the assumption of instantaneous mode switches between SIand HCCI combustion without any penalties, and the assumptionof perfect knowledge of the SI-only load/speed trajectories.
4.1 Without Tolerance RegimeFirst, the cases are compared without a tolerance regime, i.e.,
∆T = 0. Exemplary SI-HCCI and HCCI-SI mode switches areshown in Figs. 5 and 6, respectively. As can be seen in Fig. 5, thestrategies relying on prediction are able to anticipate the upcoming
1) 2) 3) 4) 5)
23.2
23.4
23.6
23.8
24
24.2
Fueleconomy[M
PG]
FTP−75
1) 2) 3) 4) 5)
22
22.2
22.4
22.6
22.8
23
Phase 1
1) 2) 3) 4) 5)
22.2
22.4
22.6
22.8
23
23.2
Phase 2
1) 2) 3) 4) 5)
26.6
26.8
27
27.2
27.4
27.6
Phase 3
−1
0
1
2
3
4
Impro
vem
ent
over
SI
[%]1) SI
2) SI/HCCI Inst.
3) SI/HCCI NoP
4) SI/HCCI LiP
5) SI/HCCI PeP
NoP LiP PeP0
0.2
0.4
0.6
0.8
1
1.2
1.4
TorqueRMSTRM
S[N
m]
Inst NoP LiP PeP0
5
10
15
20
Residencetimein
HCCI[%
]
Inst NoP LiP PeP0
50
100
150
200
NumberofSI-HCCIsw
itches
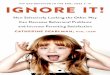
Figure 7: Drive cycle results for the different strategies during theFTP75 drive cycle. SI-only (black), instantaneous switches (grey)and strategies NoP without any prediction (blue), LiP with linearextrapolation (red), and PeP with perfect prediction (green). Top:Fuel economy during three individual phases of FTP75. Bottom-Left: Torque deviation. Bottom-Center: Total residence time inHCCI mode relative to duration of drive cycle. Bottom: Right:Number of cam switches in SI-HCCI direction.
entry of the feasible HCCI regime and prepare the mode switchaccordingly. Therefore the cam switch command is sent as soonas the regime is entered. Strategy NoP, on the other hand, startspreparation slightly later, thereby reducing the available timespent in the HCCI regime. The effect of the torque saturation atthe HCCI boundary during the HCCI-SI mode switch can be seenin Fig. 6. Strategy NoP initiates the mode switch much later thanthe other strategies, leading to a longer torque saturation in HCCImode and resulting in a vehicle jerk motion. However, no effecton velocity is visible. Cases LiP and Pep, due to their predictionof the exit event, are able to send the cam switch command assoon as the desired torque exits the HCCI regime. Therefore thedisturbance in torque is mitigated and jerk reduced.
The fuel economy and other drive cycle results for the FTP75drive cycle are shown in Fig. 7. As can be seen, improvement val-ues are between 1% and 4%. During the first phase of the FTP75the potential of HCCI combustion is reduced, since a significantpart of the phase is subject to engine cold start when a modeswitch to HCCI combustion is infeasible. As can be seen, the fueleconomy benefits for all penalized cases are substantially smaller,approx. 15%, than if instantaneous switches are assumed. This isdue to the accumulated mode switch fuel penalties. However, thethree penalized cases show almost identical fuel economy results.Strategy NoP benefits from an extended residence time in HCCImode, with, however, a potential sacrifice in drivability. The im-
6 Copyright © 2015 by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 11/06/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use

2.6
2.8
3
3.2
FE
Impro
v.[%
]
NoP
LiP
PeP (∆ T=0)
Instantanoues (∆ T=0)
100
150
200
SI-HCCIsw
itch
es
18
20
22
Tim
ein
HCCI[%
]
0 2 4 6 8 10 12 14 16 18 20
2
3
4
5
Tolerance Band ∆T [Nm]
MeanHCCItime[s]
Figure 8: Simulation results for the FTP75 drive cycle with fueleconomy improvements compared to a conventional SI engineversus width of the tolerance band ∆T . Strategy NoP without anyprediction (red circles) and strategy LiP with linear extrapolation(blue crosses), compared with the fuel economy achieved by in-stantaneous mode switches (dashed black) and perfect predictionPeP (green pluses). Top: Fuel economy improvement comparedto SI-only case. Second: Number of cam switches in SI-HCCIdirection. Third: Total residence time in HCCI mode relative toduration of drive cycle phase. Bottom: Residence time in HCCImode per SI-HCCI cam switch.
pact of the strategy on the overall torque response is measured asRMS error TRMS between the torque Te of the associated simula-tion run and the torque result Te,SI , based on the conventional SIengine without any mode switching.
TRMS =
√1
tph
∫ tph
0(Te,SI−Te)2dt (40)
with tph the duration of the associated drive cycle phase. A largerTRMS corresponds to a reduction in drivability. Indeed, it canbe seen that the cases applying prediction exhibit a reduction inTRMS. Overall, however, even in case of strategy NoP relativelymild amplitudes of jerk were experienced and velocity was barelyaffected.
0
1
2
3
4
Phase 1
Phase 2
Phase 3
∆ T=0−5 Nm10 Nm 15 Nm 20 Nm
FE
Improv.[%
]
NoP
LiP
PeP (∆ T=0)
0
20
40
60
Phase 1
Phase 2
Phase 3
SI-HCCIsw
itch
es
0 0.5 1 1.5 2 2.5 3
10
20
30
Phase 1
Phase 2
Phase 3
Tim
ein
HCCI[%
]
Torque RMS Error TRMS [Nm]
Figure 9: Simulation results for the three phases of the FTP75drive cycle with fuel economy improvements compared to a con-ventional SI engine versus drivability as RMS torque error TRMS.Strategy NoP without any prediction (red circles) and strategyLiP with linear extrapolation (blue crosses), compared with thefuel economy achieved by instantaneous mode switches (dashedblack) and perfect prediction PeP (green pluses). Top: Fuel econ-omy improvement compared to SI-only case. Center: Number ofcam switches in SI-HCCI direction. Bottom: Total residence timein HCCI mode relative to duration of drive cycle phase.
4.2 Variation of Tolerance RegimeSince the occurrences of vehicle jerk in the cases without
a tolerance band were acceptable, it may be possible to amplifyHCCI’s efficiency benefits by temporarily ignoring the driver’scommands, thereby increasing HCCI’s utilization. In this section,the width ∆T of the tolerance bands is varied from 0 Nm to 20 Nm.The associated simulation results are shown in Fig. 8.
As expected, with increasing tolerance band, fuel economyimprovements relative to the SI-only case increase as well, even-tually even surpassing the case assuming instantaneous switches.The reasons for this benefit are twofold. The larger toleranceband results in additional residence time in beneficial HCCI con-ditions. For the entire FTP75 cycle residence time in HCCI modeincreased by up to 26% and 30% for strategies NoP and LiP, re-spectively. In addition, due to the tolerance band, short excursionfrom the operating regime do not necessarily lead to fuel expen-sive mode switches. Therefore also the number in cam switchesdecreased by up to 30% for the two strategies. Together these twoeffects result in a dramatic increase in residence time in HCCIper cam switch, i.e., by up to 78% and 88% for strategies NoPand LiP, respectively.
Note that even for ∆T = 20Nm the driver was able to followthe reference velocity without violating the velocity tolerance
7 Copyright © 2015 by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 11/06/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use

boundaries. However, with larger ∆T , time periods, during whichthe engine does not respond to changes in pedal position, becomelonger. This increasingly impacts drivability and TRMS. Thetrade-off between fuel economy improvement and drivability canbe seen in Fig. 9, split up into the three phases of the FTP75cycle. By introducing a small band with ∆T = 1Nm to 5 Nmthe fuel economy benefits are increased without greatly affectingdrivability. However, it can be seen that for larger ∆T the trade-offtends to plateau. Eventually, vehicle jerk and the slow engineresponse would become unacceptable for the driver. Overall, itcan be seen that strategy LiP is slightly superior to NoP in a waythat at same fuel economy, the impact on drivability is reduced.This is even amplified if perfect prediction is assumed, whichat ∆T = 0Nm shows similar fuel economy, but at significantlyreduced deviations in engine torque.
5 CONCLUSIONA finite state model for a SI/HCCI multimode engine was
integrated in a vehicle simulation to capture delays in torque asso-ciated with combustion mode switching. Two supervisory controlstrategies were tested. The first one without any prediction, thesecond one applying linear extrapolation to anticipate entries andexits of the feasible HCCI combustion regime. The HCCI regimewas extended by a tolerance band. As long as the driver’s desiredtorque is located within the tolerance regime, the actual enginetorque saturates at the HCCI limit, thereby temporarily ignoringthe driver’s commands. This in turn leads to a degradation invehicle drivability as perceived by the driver.
The strategies were tested in simulation on the FTP75 drivecycle with varying width of the tolerance regime. It was seen thatboth strategies showed very similar fuel economy, however, thepredictive one accomplishes it with smaller deviations in torque.Applying a tolerance band with small width increases fuel econ-omy by increasing time spent in the HCCI regime while avoidingmode switch fuel penalties due to short excursions. For bothstrategies a narrow tolerance regime leads to a relatively smallimpact on torque without significant impact on velocity. Widertolerance bands increase the positive effect on fuel economy andthe driver was still able to follow the reference velocity withoutviolations. However, very long time periods during which a drivercommand is ignored would lead to a low drivability performanceand are unacceptable.
REFERENCES[1] Kulzer, A., Hathout, J.-P., Sauer, C., Karrelmeyer, R., Fis-
cher, W., and Christ, A., 2007. “Multi-mode combustionstrategies with CAI for a GDI engine”. In SAE, no. 2007-01-0214.
[2] Thring, R., 1989. “Homogeneous-charge compression igni-tion (HCCI) engines”. In SAE, no. 892068.
[3] Ortiz-Soto, E., Assanis, D., and Babajimopoulos, A., 2012.
“A comprehensive engine to drive-cycle modelling frame-work for the fuel economy assessment of advanced engineand combustion technologies”. International Journal ofEngine Research, 13, pp. 287–304.
[4] Nuesch, S., Jiang, L., Sterniak, J., and Stefanopoulou, A.,2015. “Fuel economy of a multimode combustion enginewith three-way catalytic converter”. Journal of DynamicSystems, Measurement, and Control, 137.
[5] Lawler, B., Ortiz-Soto, E., Gupta, R., Peng, H., and Filipi,Z., 2011. “Hybrid electric vehicle powertrain and controlstrategy optimization to maximize the synergy with a gaso-line HCCI engine”. In SAE, no. 2011-01-0888.
[6] Solouk, A., Shahbakhti, M., and Mahjoob, M., 2014. “En-ergy management and control of a hybrid electric vehiclewith an integrated low temperature combustion (LTC) en-gine”. In ASME DSCC, no. DSCC2014-6286.
[7] Matsuda, T., H., W., Kono, T., Nakamura, T., and Urushi-hara, T., 2008. “A study of a gasoline-fueled HCCI engine -mode changes from SI combustion to HCCI combustion”.In SAE, no. 2008-01-0050.
[8] Yang, X., and Zhu, G., 2013. “SI and HCCI combustionmode transition control of an HCCI capable SI engine”.IEEE Transactions on Control Systems Technology, 21(5),September, pp. 1558–1569.
[9] Nuesch, S., Gorzelic, P., Jiang, L., Sterniak, J., and Ste-fanopoulou, A., 2015. “Accounting for combustion modeswitch dynamics and fuel penalties in drive cycle fuel econ-omy”. International Journal of Engine Research, May.
[10] Nuesch, S., Sterniak, J., Jiang, L., and Stefanopoulou, A.,2015. “On beneficial mode switch decisions based on short-term engine load prediction”. In IFAC E-COSM.
[11] Nuesch, S., Hellstrom, E., Jiang, L., and Stefanopoulou,A., 2013. “Influence of transitions between SI and HCCIcombustion on driving cycle fuel consumption”. In ECC,pp. 1976–1981.
[12] List, H., and Schoeggl, P., 1998. “Objective evaluation ofvehicle driveability”. In SAE, no. 980804.
[13] Wei, X., and Rizzoni, G., 2004. “Objective metrics of fueleconomy , performance and drivability - a review”. In SAE,no. 2004-01-1338.
[14] Shin, C., Choi, J., Cha, S., and Lim, W., 2014. “An objec-tive method of driveability evaluation using a simulationmodel for hybrid electric vehicles”. International Journal ofPrecision Engineering and Manufacturing, 15(2), February,pp. 219–226.
[15] Nuesch, S., Hellstrom, E., Jiang, L., and Stefanopoulou,A., 2014. “Mode switches among SI, SACI, and HCCIcombustion and their influence on drive cycle fuel economy”.In ACC, pp. 849–854.
8 Copyright © 2015 by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 11/06/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use