Embed Size (px)
Citation preview

Entropic-graphs: Applications
Alfred O. Hero
Dept. EECS, Dept Biomed. Eng., Dept. Statistics
University of Michigan - Ann Arbor
http://www.eecs.umich.edu/˜hero
Collaborators: Huzefa Heemuchwala, Jose Costa, Bing Ma, Olivier
Michel
� Image registration
� Multivariate outlier rejection
� Divergence estimation
1

Image Registration
(a) ImageX0 (b) ImageXi
Figure 1: A multidate 3D breast-registration example
2

Range of UL breast Image Types
Figure 2: Three ultrasound breast scans. From top to bottom are: case 151,
case 142 and case 162.
3

MI Registration of Gray Levels (Viola&Wells:ICCV95)� X: aN�N UL image (lexicographically ordered)
� X(k): image gray level at pixel locationk
� X0 andX1: primary and secondary images to be registered
Hypothesis: f(X0(k);Xi(k)gN2
k=1 are i.i.d. r.v.’s with j.p.d.f
f0;i(x0;x1); x0;x1 2 f0;1; : : : ;255g
Mutual Information (MI) criterion : T = argmaxTiMI
whereMI is an estimate of
MI( f0;i) =Z Z
f0;i(x0;x1) ln f0;i(x0;x1)=( f0(x0) fi(x1))dx1dx0: (1)
4

(a) ImageIR (b) ImageIT
Figure 3: Single Pixel Coincidences (Left and right: reference imageIR at
0o and rotated imageIT at 8o)
5

Single-Pixel Scatterplot(ZRj ;Z
Tj )
pj=1
50 100 150 200 250
50
100
150
200
250
50 100 150 200 250
50
100
150
200
250
50 100 150 200 250
50
100
150
200
250
50 100 150 200 250
50
100
150
200
250
Figure 4:Grey level scatterplots. 1st Col: target=reference slice. 2nd Col: target = reference+1 slice.
6

α-MI Registration of Coincident Features� X: aN�N UL image (lexicographically ordered)
� Z = Z(X): a general image feature vector in aP-dimensional feature
space
Let fZ0(k)gKk=1 andfZi(k)gK
k=1 be features extracted fromX0 andXi at K
identical spatial locations
α-MI coincident-feature criterion
T = argmaxTiMIα
whereMIα is an estimate of
MIα( f0;i) =
1α�1
log
Z Z
f α0;i(z0;z1) f 1�α
0 (z0) f 1�αi (z1)dz1dz0: (2)
7

Why α-MI?
Special cases:
� α-MI vs. Shannon MI
limα!1
MIα( f0;i) =Z Z
f0;i ln f0;i=( f0 fi)dz1dz0:
� α-MI vs. Hellinger Mutual Affinity
MI 12
( f0;i) = � ln�Z Z p
f0;i f0 fi dz0dz1
�2
� α-MI vs. Batthacharyya-Hellinger information
Z Z �p
f0;i �p
f0 fi
�2dz0dz1 = 2
�1�expf�MI 1
2
( f0;i)g�
8

α-MI and Decision Theoretic Error Exponents
H0 : Z0(k);Zi(k) independent
H1 : Z0(k);Zi(k) o:w:
Bayes probability of error
Pe(n) = β(n)P(H1)+α(n)P(H0)
Chernoff bound
liminfn!∞
1n
logPe(n) =� supα2[0;1]
f(1�α)MIα( f0;i)g :9

−5 −4 −3 −2 −1 0 1 2 3 4 5−0.3
−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
ANGLE OF ROTATION (deg) −−−−−−>
α−D
IVE
RG
EN
CE
(αM
I) −
−−
−−
−>
α−DIVERGENCE v/s α CURVES FOR α ∈ [0,1] FOR SINGLE PIXEL INTENSITY
α =0 α =0.1α =0.2α =0.3α =0.4α =0.5α =0.6α =0.7α =0.8α =0.9
α=0.1
α=0.9
α=0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90
0.005
0.01
0.015
0.02
0.025
α −−−−−−>
curv
atur
e of
α−
MI −
−−
−−
−>
CURVATURE OF: α−MI v/s α CURVE FOR SINGLE PIXEL INTENSITY
Figure 5: Left: α-Divergence as function of angle. Right: Resolution ofα-
Divergence as function of alpha
10

Higher Level Features
Disadvantages of single-pixel features:
� Only depends on histogram of single pixel pairs
� Insensitive to spatial reording of pixels in each image
� Difficult to select out grey level anomalies (shadows, speckle)
� Spatial discriminants fall outside of single pixel domain
� Alternative : Aggregate spatial features
11
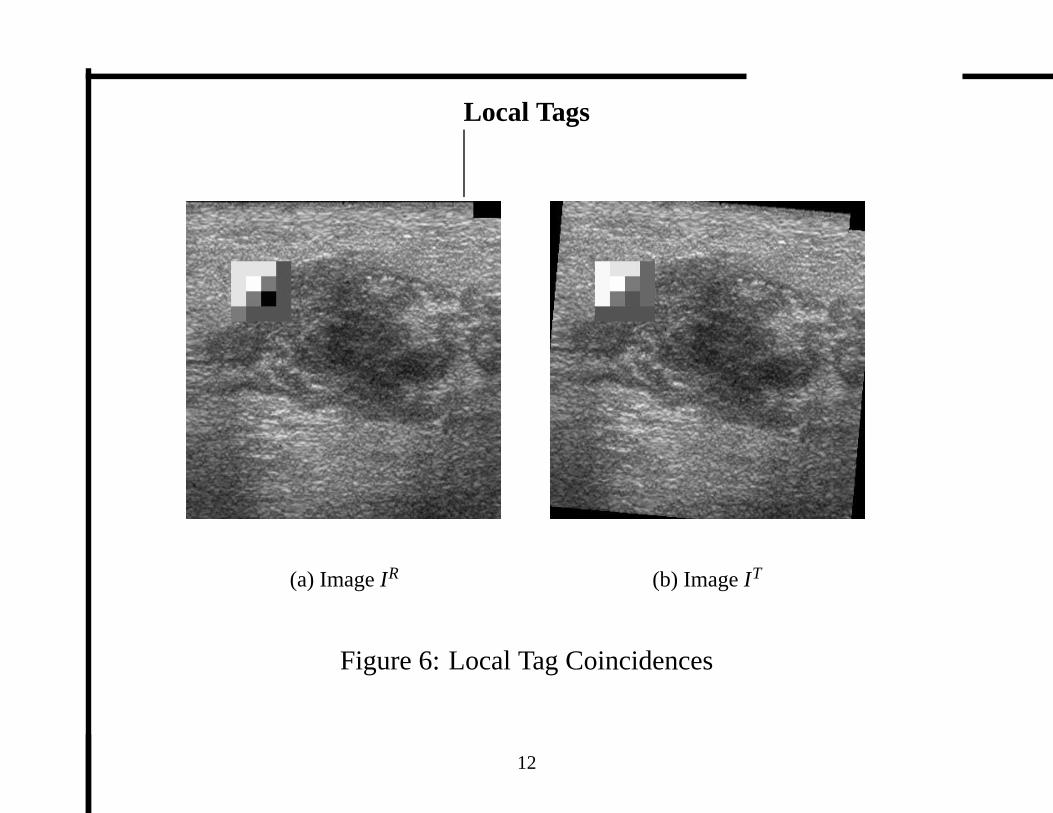
Local Tags
(a) ImageIR (b) ImageIT
Figure 6: Local Tag Coincidences
12
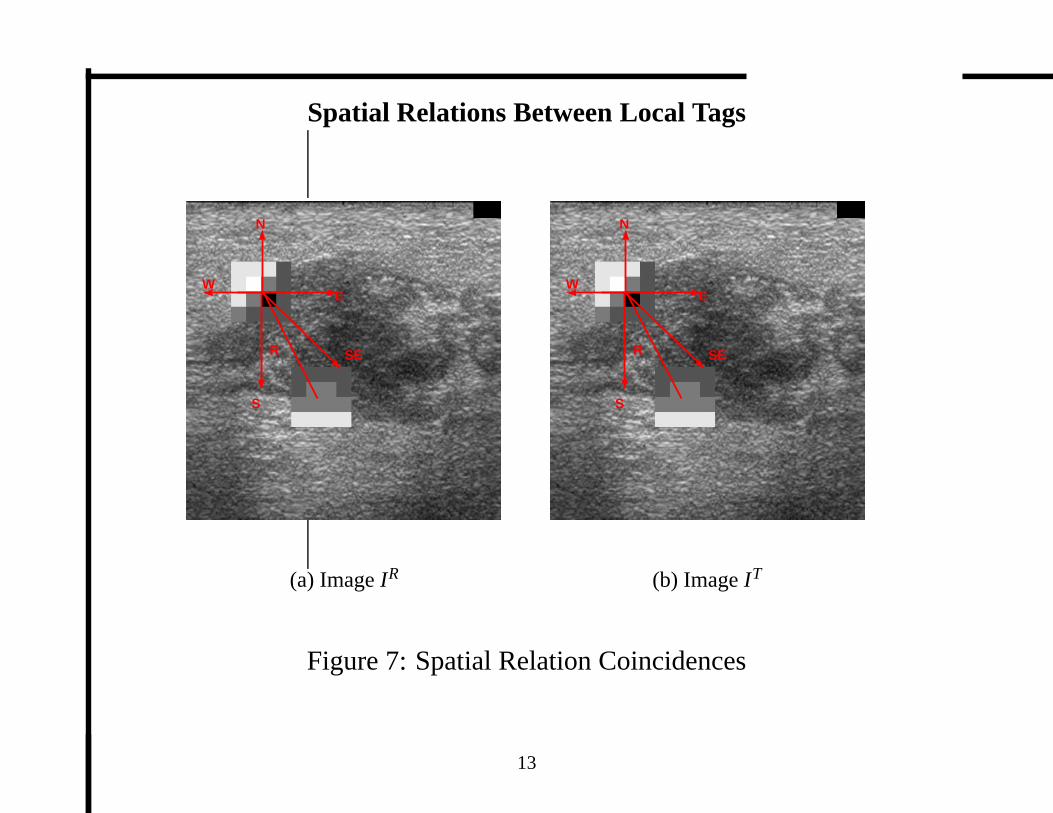
Spatial Relations Between Local Tags
N
E
SE
S
W
R
(a) ImageIR
N
E
SE
S
W
R
(b) ImageIT
Figure 7: Spatial Relation Coincidences
13

Feature Coincidence Tree of Local Tags
Root Node
Depth 1
Depth 2
Not examined further
Figure 8:Part of feature tree data structure.
Terminal nodes (Depth 16)
Figure 9:Leaves of feature tree data structure.
14

Forests of Randomized Feature TreesRANDOMIZED TREES
Figure 10:Forest of randomized trees
Registration criterion:
T = argmaxTi
# trees
∑t=1
MIα(t)
15

US Registration Comparisons
151 142 162
pixel 0:6=0:9 0:6=0:3 0:6=0:3
tag 0:5=3:6 0:5=3:8 0:4=1:4
spatial-tag 0:99=14:6 0:99=8:4 0:6=8:3
Table 1: Numerator =optimal values ofα and Denominator = maximum
resolution of mutualα-information for registering various images (Cases
151, 142, 162) using various features (pixel, tag, spatial-tag, ICA).
16

ICA Features
Decomposition ofM�M tag imagesY(k) acquired atk= 1; : : : ;K spatial
locations
Y(k) =
P
∑p=1
akpSp
� fSkg
Pk=1: statistically independent components
� akp: projection coefficients of tagY(k) onto componentSp
� fSkg
Pk=1 andP: selected via MLE and MDL
� Feature vector for coincidence processing:
Z(k) = [ak1; : : : ;akP]T
17

ICA feature basis for US breast images
Figure 11:Estimated ICA basis set for ultrasound breast image database
18

Feature-based Indexing: Challenges� How to best select discriminating features?
– Require training database of images to learn feature set
– Apply cross-validation...
– ...bagging, boosting, or randomized selection?
� How to computeα-MI for multi-dimensional features?
– Tag space is of high cardinality:25616� 1032
– ICA projection-coefficient space is multi-dimensional continuum
– Soln 1: partition feature space and count coincidences...
– Soln 2: apply density estimation and ...
– ... plug into theα-MI
– Soln 3: estimateα-MI directly
19

Methods of Entropy/Divergence Estimation� Z = (ZR;ZT): a statistic (feature pair)
� fZig: n i.i.d. realizations fromf (Z)
Objective: Estimate
Hα( f ) =1
1�αln
Z
f α(x)dx
1. Parametric density estimation methods
2. Non-parametric density estimation “plug-in” methods
3. Non-parametric minimal-graph estimation methods
20

Minimal Graphs: Minimal Spanning Tree (MST)
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
z1
z 2
128 random samples
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
z1
z 2
MST
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
z1
z 2
128 random samples
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
z1
z 2
MST
Figure 12:
21

Asymptotics of estimators ofHα( f )
DefineBσ;qp , the Besov space of`p(IRd) functions with smoothness given
by parametersσ andq.
Proposition 1 Let p> d� 2 andα = (d� γ)=d 2 [1=2;(d�1)=d]
supf α2B1;1
p
E1=κ
�����Z bf α(x)dx�Z
f α(x)dx
����κ
�� O
�
n�1=(2+d)�
while,
supf α2B1;1
p
E1=κ
�����Lγ(X1; : : : ;Xn)
nα �βLγ;dZ
f α(x)dx
����κ
��O
�
n
�
αλ(p)
1+αλ(p)
1d
�
whereλ(p) = d+1�d=p.
Note: minimal-graph estimator converges faster for allα� 1=2
22

Extension: divergence estimation� g(x): a reference density on IRd
� Assumef � g, i.e. for allx such thatg(x) = 0 we havef (x) = 0.
� Make measure transformationdx! g(x)dxon [0;1]d. Then forYn =
transformed data
limn!∞
L(Yn)=nα = βLγ;d exp((α�1)Dα( fkg)) ; (a:s:)
23

Proof
1. Make transformation of variablesx= [x1; : : : ;xd]T ! y= [y1; : : : ;yd]T
y1 = G(x1) (3)
y2 = G(x2jx1)
......
yd = G(xdjxd�1; : : : ;x1)
whereG(xkjxk�1; : : : ;x1) =R xk
�∞ g(xkjxk�1; : : : ;x1)dxk
2. Induced densityh(y), of the vectory, takes the form:
h(y) =
f (G�1(y1); : : : ;G�1(ydjyd�1; : : : ;y1))
g(G�1(y1); : : : ;G�1(ydjyd�1; : : : ;y1))
(4)
whereG�1 is inverse CDF andxk = G�1(ykjxk�1; : : : ;x1).
24
3. Then we know
Hα(Yn)!
11�α
ln
Z
hα(y)dy (a:s:)
4. By Jacobian formula:dy=���dy
dx
���dx= g(x)dx and
11�α
ln
Zhα(y)dy=
11�α
ln
Z �
f (x)
g(x)�α
g(x)dx= D( fkg)
25

0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1Original data
z1
z 2
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
exact inverse transform
z1
z 2
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1tranfd data
z1
z 2
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1tranfd data, 2D cdf estd
z1
z 2
Figure 13:Top Left: i.i.d. sample from triangular distribution, Top Right: exact
transformation, Bottom: after application of exact and empirical transformations.
26

Application: α-MI estimation
Objective: To estimate
MIα(X;Y) =
1α�1
ln
Z
f α(X;Y)( f (X) f (Y))1�αdXdY:
Assume thatf (X;Y) is such thatf α(X;Y) is in the the Besov space
B1p;1(R
2), p> 2 andα = 1=2.
Density plug in method: rms convergence rate
MSE12 (MI)�O(n�1=4)
Measure transformation method: rms convergence rate
MSE12 (MI)�O(n�αλ(p)=(1+αλ(p))1=d)!p!∞ O(n�3=10)
27

Alternative depedency measure:α-Jensen difference
1. Extract features from reference and transformed target images:
Xm = fXig
mi=1 and Yn = fYig
ni=1
2. Construct following MST function onXm andYn
∆L= lnLγ(Xm[Yn)=(n+m)α�m
n+mlnLγ(Xm)=mα�
nn+m
lnLγ(Yn)=nα
3. Minimize∆Lγ over transformations producingYn.
(1�α)�1∆L ! Hα (ε fx+(1� ε) fy)� εHα ( fx)� (1� ε)Hα ( fy)
whereε = mm+n
28

Example
0
200
400
0
100
200
3000
10
20
30
40
X
misaligned points
Y
Inte
nsity
(a)
0
200
400
0
100
200
3000
10
20
30
40
X
MST demonstration
Y
Inte
nsity
(b)
Figure 14: MST demonstration for misaligned images
29
0
200
400
0
100
200
3000
20
40
60
X
Aligned points
Y
Inte
nsity
(a)
0
200
400
0
100
200
3000
20
40
60
X
MST demonstration
Y
inte
nsity
(b)
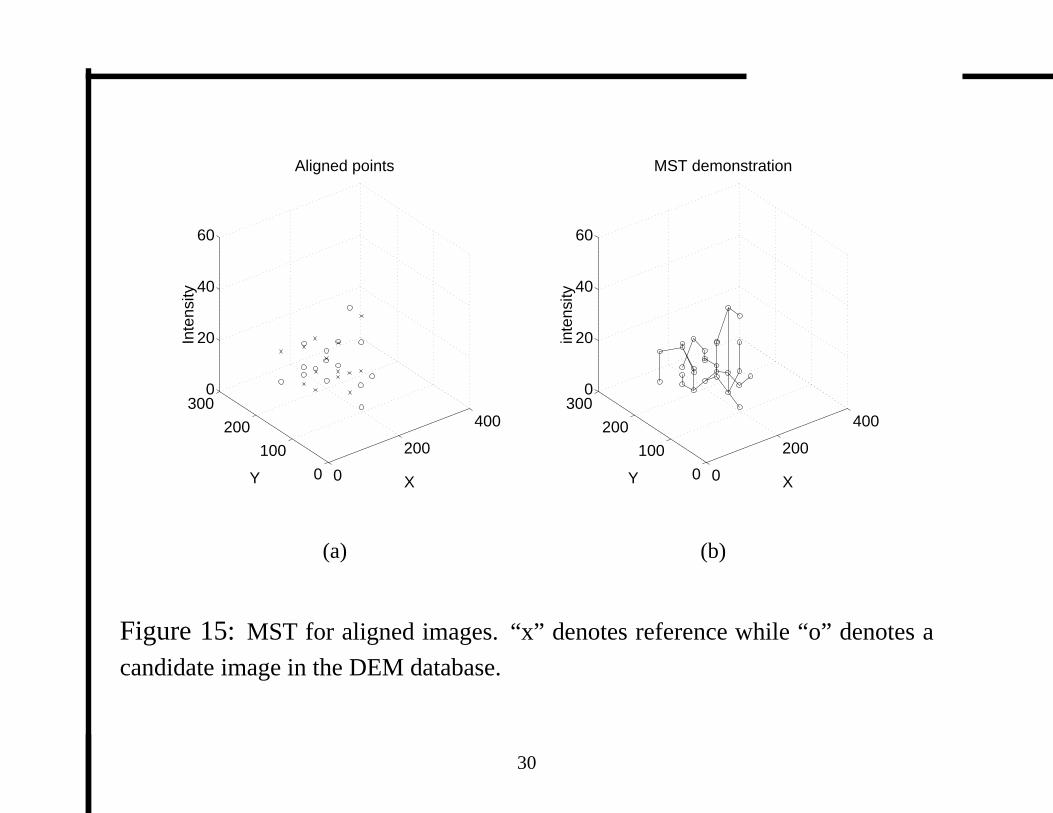
Figure 15:MST for aligned images. “x” denotes reference while “o” denotes a
candidate image in the DEM database.
30

254256
258260
262264
266 10
15
20
25
30
5500
6000
6500
7000
7500
8000
8500
9000
yrot
xrot
MS
T L
engt
h
MST Length versus Registration Angle
Figure 16:Scatter plot of MST length for a selection of relative rotation angles
between reference DEM image and target radar image.
31

Experimental results for US Image Registration
−8 −6 −4 −2 0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Relative rotation between images (degrees)
Nor
mal
ized
MS
T L
engt
h, M
I
MST Length, alphaMI profiles. Single Pixel domain, vol. 142
MI (alpha=0.5)MST Length
(a)
−8 −6 −4 −2 0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Relative rotation between images (degrees)
MS
T L
en.,
alph
aJen
sen(
4 bi
ns/d
imen
sion
)
MST & alphaJensen profile for 8D ICA feature vector, vol. 142
Jensen (alpha=0.5)MST Length
(b)
−8 −6 −4 −2 0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
MS
T L
engt
h
Relative rotation between images (degrees)
Norm. MST Length profile for 64D ICA feature vector, vol. 142
(c)
Figure 17:Objective function profiles for histogram (L,M) and MST (L,M,R) es-
timators ofα-Jensen difference vs histogram plug-in estimator (α= 1=2): Single-
pixel (L), 8D ICA (M), 64D ICA (R).
32

Quantitative Performance Comparisons
0 5 10 15 20 250
5
10
15
Standard Deviation of Noise
Pos
ition
of P
eak
Effect of Additive Noise on peak of objective function
alphaJensen Diff MST on 8D−ICAalphaMI on single pixels w/ HitogramsalphaJensen on 8D−ICA using HistogramsalphaJensen on single pixels w/ MST
Figure 18: Quantitative registration MSE comparisons.
33

Computational Acceleration of MST
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
z0
z1
Selection of nearest neighbors for MST using disc
r=0.15
Figure 19:Acceleration of Kruskal’s MST algorithm from n2 logn to nlogn.
34

0 50000 1000000
50
100
150
200
Number of points, N
Exe
cutio
n tim
e in
sec
onds
Linearization of Kruskals MST Algorithm for N 2 edges
Standard Kruskal Algorithm O(N 2)Intermediate: Disc imposed, no rank orderingModified algorithm: Disc imposed, rank ordered
Figure 20:Comparison of Kruskal’s MST to our nlogn MST algorithm.
35

Outlier Sensitivity of minimal n-point graphs
Assumef is a mixture density of the form
f = (1� ε) f1+ ε fo; (5)
where
� fo is a known (uniform) outlier density
� f1 is an unknown target density
� ε 2 [0;1] is unknown mixture parameter
36
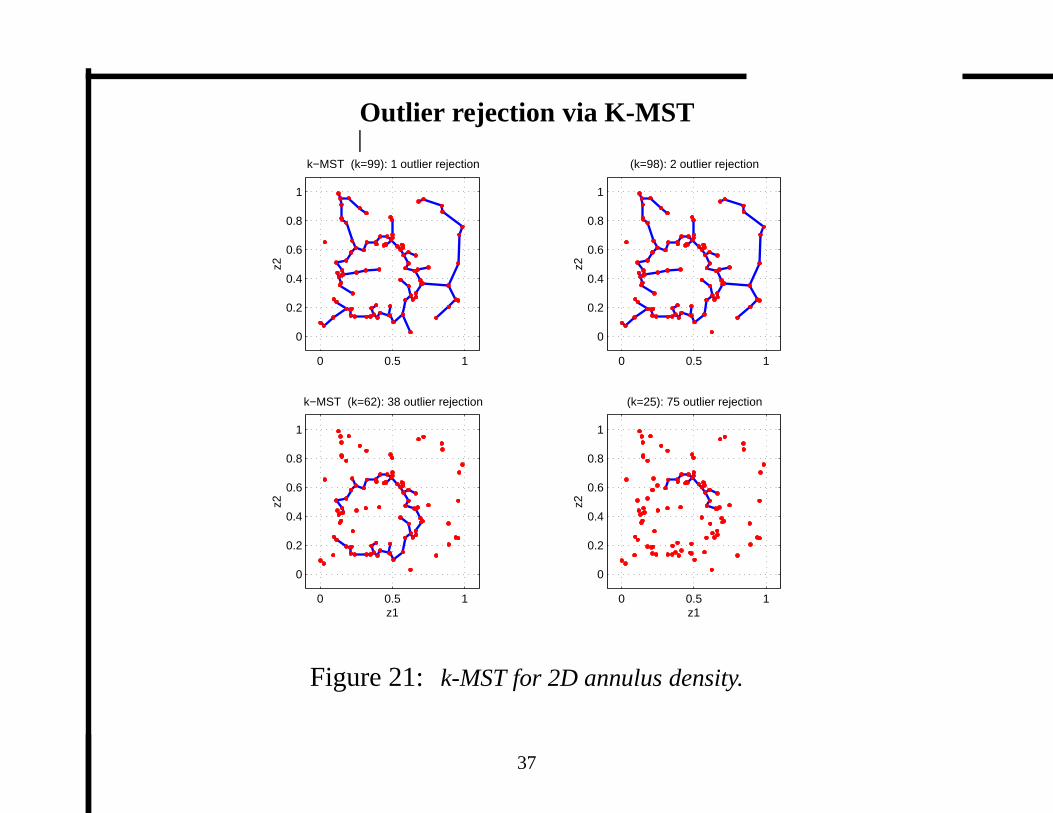
Outlier rejection via K-MST
0 0.5 1
0
0.2
0.4
0.6
0.8
1
z2
k−MST (k=99): 1 outlier rejection
0 0.5 1
0
0.2
0.4
0.6
0.8
1
z2
(k=98): 2 outlier rejection
0 0.5 1
0
0.2
0.4
0.6
0.8
1
z1
z2
k−MST (k=62): 38 outlier rejection
0 0.5 1
0
0.2
0.4
0.6
0.8
1
(k=25): 75 outlier rejection
z1
z2
Figure 21: k-MST for 2D annulus density.
37

k-MST Stopping Rule
0 20 40 60 80 1000
20
40
60
80
100
k
k−M
ST
leng
thk−MST length as function of k
0 20 40 60 80 1000
5
10
15
20
25
30
k
crite
rion(
k)
selection criterion
Figure 22:Left: k-MST curve for 2D annulus density with addition of uniform “outliers” has a knee in the vicinity of n� k = 35. This
knee can be detected using residual analysis from a linear regression line fitted to the left-most part of the curve. Right: error residual of linear
regression line.
38

Greedy partioning approximation to K-MST
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Figure 23:A sample of75 points from the mixture density f(x) = 0:25f1(x)+0:75fo(x) where fo is a uniform density over[0;1]2 and
f1 is a bivariate Gaussian density with mean(1=2;1=2) and diagonal covariancediag(0:01). A smallest subset Bmk is the union of the two cross
hatched cells shown for the case of m= 5 and k= 17.
39

Extended BHH Theorem for Greedy K-MST
Fix ρ 2 [0;1] and assume that thek-minimal graph istightly coverable. If
k= bρnc, asn! ∞ we have (Hero&Michel:IT99)
Lγ(X �
n;k)=(bρnc)α ! βLγ;d minA:P(A)�ρ
Z
f α(xjx2 A)dx (a:s:)
or, alternatively, with
Hα( f jx2 A) =1
1�αln
Zf α(xjx2 A)dx
Lγ(X �
n;k)=(bρnc)α ! βLγ;d exp
�(1�α) min
A:P(A)�ρHα( f jx2 A)
�(a:s:)
40

0 10 20 30 40 500
0.1
Density of X
x
f(x)
0 10 20 30 40 500
0.1
x
max
(f(x
)−f(
x)
Water filled density
0 10 20 30 40 500
0.1
0.2Asymptotic density of X seen by k−MST
x
f(x|
A)
Figure 24:Waterpouring contruction of minimum entropy density.
41

k-MST Influence Function for Gaussian Feature Density
−20
0
20
−20
0
20−100
0
100
200
300
MST for planar Gaussian
IC(x
,F,L
)
−20
0
20
−20
0
20−40
−20
0
20
40
60
k−MST for planar Gaussian
IC(x
,F,L
)
Figure 25:MST and k-MST influence curves for Gaussian density on the plane.
42

Application: testing distributions
Non-parametric density classification problem:decide between
H0 : f (x) = f0(x)
H1 : f (x) 6= f0(x)
Step 1: Perform uniformizing transformation onXn (underH0)
Step 2: Construct MST on transformed variablesYn
Classification rule:
Dα( fk f0)
def
= Lγ(Yn)=nαH1
><
H0
η
43

Application: Robust density estimation
Estimatef1(x) given sample from mixture
f (x) = (1� ε) f1(x)+ ε f0(x)
� f0(x)= known contaminating density
Step 1: Perform transformation onXn to uniformize f0 component
Step 2: Constructk-MST on transformed variablesYn
Lγ(Y �
n;k)=(bρnc)α ! βLγ;d minA:P(A)�ρ
ZA
�f (x)
f0(x)�α
f0(x)dx
Robust Density Estimator:kernel estimator applied toXi1; : : : ;Xibρnc
44

Classification Example
To test:
H0 : f (x) = triangular
H1 : f (x) 6= triangular
Ground Truth:
� f (x) = (1� ε) f1(x)+ ε f0(x): mixture density
� f1(x) is uniform density on[0;1]2
� f0(x) is triangular density on[0;1]2
Test statistic:Dα( fk f0)
H1
><
H0
η
45

ROC curves
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
N=256, ε=0.9, h=(green,unif), g=(red,triang)
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
ROC, α div. test, N=256, ε=.1,.3,.5,.7,.9 ; f=h(H0)
PFA
PD
Figure 26: Left: A sample from triangle-uniform mixture density withε = 0:9 in the transformed domainYn. Right: ROC curves of
thresholded K-MST. Curves are increasing inε over the rangeε 2 f0:1;0:3;0:5;0:7;0:9g
46

Outlier rejection example
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
N=256, ε =0.9, h=(green,unif), g=(red,triang)
Clustering in transformed data domain0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
N=256, ε =0.9, h=(green,unif), g=(red,triang)
Clustering in original data domain
Figure 27:Left: the k-MST implemented on the transformed scatterplotYn with k= 230. Right: same k-MST displayed in the original
data domain.
47

Conclusions
1. α-divergence can be justified via decision theory
2. Applicable to feature-based image registration
3. Non-parametric estimation is possible even for very high dimensions
via MST
4. MST outperforms plug-in estimation when latter is feasible
5. Robustified MST can be defined via optimal pruning of MST: k-MST
6. Divergence can be estimated by preprocessing with measure
tranformation
48





























