Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DO CEARA
DEPARTAMENTO DE ENGENHARIA ELETRICA
PROGRAMA DE POS-GRADUACAO EM ENGENHARIA ELETRICA
ALBERTO ALEXANDRE MOURA DE ALBUQUERQUE
SISTEMA DE CONTROLE DE UMA INCUBADORA NEONATAL SEGUNDO A
NORMA NBR IEC 60.601-2/19: ASPECTOS DE AVALIACAO, IDENTIFICACAO
DINAMICA E NOVAS PROPOSTAS
FORTALEZA
2012

ALBERTO ALEXANDRE MOURA DE ALBUQUERQUE
SISTEMA DE CONTROLE DE UMA INCUBADORA NEONATAL
SEGUNDO A NORMA NBR IEC 60.601-2/19: ASPECTOS DE
AVALIACAO, IDENTIFICACAO DINAMICA E NOVAS PROPOSTAS
Dissertacao submetida a Coordenacao do
Curso de Pos-Graduacao em Engenharia
Eletrica, da Universidade Federal do Ceara,
como parte dos requisitos exigidos para
obtencao do grau de Mestre em Engenharia
Eletrica.
Orientador: Prof. Dr. Otacılo da Mota
Almeida
Co-Orientador: Prof. Dr. Arthur Plınio de
Souza Braga
FORTALEZA
2012

Dados Internacionais de Catalogacao na PublicacaoUniversidade Federal do Ceara
Biblioteca de Pos-Graduacao em Engenharia - BPGE
A298c Albuquerque, Alberto Alexandre Moura deSistema de Controle de uma Incubadora Neonatal Segundo a Norma NBR IEC
60601-2/19: Aspectos de avaliacao, Identificacao Dinamica e Novas Propostas / AlbertoAlexandre Moura de Albuquerque - 2012.
87 f. : il., enc. ; 30 cm.
Dissertacao (mestrado) - Universidade Federal do Ceara, Departamento deEngenharia Eletrica, Programa de Pos-Graduacao em Engenharia Eletrica, Fortaleza,2012
Area de Concentracao: Eletronica de Potencia e Automacao.Orientacao: Prof. Dr. Otacılio da Mota Almeida.Coorientacao: Prof. Dr. Arthur Plınio de Souza Braga.
1. Engenharia Eletrica. 2. Controle preditivo. I. Tıtulo.
CDD 621.3


A minha famılia, em especial aosmeus pais.

AGRADECIMENTOS
A Deus, em primeiro lugar.
Ao meu orientador, Prof. Dr. Otacılio da Mota Almeida, pela confianca em mim depo-
sitada, pela transmissao de novos conhecimentos e pela competencia com a qual orientou
todo o desenvolvimento desta dissertacao.
Aos meus co-orientadores Prof. Dr Arthur Plınio de Souza Braga e o Prof. Dr. Bis-
mark Claure Torrico, por todo apoio e suporte durante todo o desenvolvimento desta
dissertacao.
Aos colegas do laboratorio GPAR/UFC, pelo excelente ambiente de trabalho em especial
aos integrantes do grupo incubadora: Joao Paulo, Silas, Lucas, Marcelo, Uchoa e Itanor.
Aos meus pais Francisco Cesar de Albuquerque Moura e Maria Silvia Helena Moura de
Albuquerque, e a minha namorada Dhebora Sales Rodrigues, pelo incentivo.
Aos professores e funcionarios do Departamento de Engenharia Eletrica que de forma
direta ou indireta participaram do desenvolvimento deste trabalho.
Ao meu chefe professor Andre Luiz Carneiro de Araujo pelas inumeras horas liberadas do
trabalho para o desenvolvimento desta dissertacao.
Aos meus amigos do Instituto Federal do Ceara, em especial Rejane e Tiago Lessa.
A FUNCAP (Fundacao Cearence de Apoio a Pesquisa) pelo suporte financeiro.

RESUMO
Neste trabalho foi construıdo um sistema de hardware e software acoplado em
uma incubadora comercial transformando-a em uma plataforma de estudo sobre o pro-
cesso de umidade e temperatura caracterıstico deste sistema. Atraves do software em um
computador e possıvel fazer medicoes das variaveis controladas e modificar os valores das
variaveis manipuladas, neste caso, o resistor de aquecimento do ar, no sistema de tempe-
ratura, e o resistor de aquecimento da agua no sistema de umidade. Foram identificados
modelos do processo e um controlador preditivo do tipo GPC foi projetado para atender
os criterios definidos na norma NBR IEC 60601-2/19. Para verificar o cumprimento destes
criterios pelo controlador foi construıdo um sistema de hardware e software para realizar
alguns dos ensaios previstos pela norma, criando um sistema de avaliacao de desempenho
do comportamento das grandezas de temperatura e umidade relativa do ar no interior de
incubadoras neonatais conforme a norma. O desempenho do controlador projetado foi
comparado com o controlador pre existente da incubadora comercial. Foi verificado que o
controlador projetado conseguiu atender os criterios da norma com sobre-sinal e erro de
regime menores que os obtidos pelo controlador ja pre-existente na incubadora comercial.
Palavras-chave: Incubadora neonatal. Controle Preditivo. Identificacao de
modelos de processos. NBR IEC 60601-2/19.

ABSTRACT
In this work was built a system of hardware and software engaged in a commercial
incubator turning it into a platform to study the process of humidity and temperature
characteristic of this system. Using the software on a computer can make measurements
of controlled variables and modify the values of the manipulated variables, in this case
the resistor heating the air in the temperature’s system and the heating resistor of the
water in the humidity’s system. Process models were identified and a predictive controller
type GPC is designed to meet the criteria defined in the standard NBR IEC 60601-2/19.
To verify compliance with the criteria by the controller was built a system of hardware
and software to perform some of the tests required by the standard. The performance of
the controller was designed compared to the controller pre-existing commercial incubator.
It was verified that the controller designed could meet the criteria of the standard more
efficiently than the already pre existing business in the incubator.
Keywords: Predictive Controller, Neonatal Incubator, Temperature and Humi-
dity Estimation, NBR IEC 60601-2/19.

LISTA DE FIGURAS
Figura 2.1 Incubadora comercial tıpica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Figura 2.2 Incubadora comercial utilizada no desenvolvimento deste trabalho. . . . . 20
Figura 2.3 Visao geral do funcionamento da incubadora comercial. . . . . . . . . . . . . . . . 21
Figura 2.4 Visao geral do sistema de controle desenvolvido. . . . . . . . . . . . . . . . . . . . . . . 22
Figura 2.5 Esquema eletrico do circuito gradador utilizado. . . . . . . . . . . . . . . . . . . . . . . 23
Figura 2.6 Esquema eletrico do circuito de deteccao de passagem por zero. . . . . . . . 23
Figura 2.7 Esquema eletrico da fonte de 5V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Figura 2.8 Visao geral dos principais elementos da placa de controle. . . . . . . . . . . . . . 24
Figura 2.9 Localizacao do sensor SHT11 na cupula da incubadora. . . . . . . . . . . . . . . . 25
Figura 2.10 Informacoes exibidas pela display durante o funcionamento do sistema. 26
Figura 2.11 Placa de interface de comunicacao entre a placa de controle e o computa-
dor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Figura 2.12 Distribuicao espacial dos sensores no interior da incubadora como deter-
minado pela norma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Figura 2.13 Diagrama da visao geral do sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31

Figura 2.14 Projeto da base do sistema de aquisicao de dados da incubadora neonatal 32
Figura 2.15 Foto do sistema de aquisicao de dados desenvolvido. (Detalhe: Sensor
MCP9808) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Figura 2.16 Placa de interface de comunicacao entre a placa de controle e o computa-
dor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Figura 2.17 Layout da interface grafica desenvolvida. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Figura 5.1 Visao geral de controlador preditivo baseado em modelo. . . . . . . . . . . . . . 51
Figura 6.1 Dados do ensaio utilizados para treinamento dos modelos de mapea-
mento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Figura 6.2 Dados do ensaio utilizados para validacao dos modelos de mapeamento. 59
Figura 6.3 Resultado dos modelos regressivos com os dados de treinamento. . . . . . . 61
Figura 6.4 Resultado dos modelos regressivos com os dados de validacao. . . . . . . . . 61
Figura 6.5 Resultado dos modelos com redes MLP com os dados de treinamento. 62
Figura 6.6 Resultado dos modelos com redes MLP com os dados de validacao. . . . 63
Figura 6.7 Resultado dos modelos NARX com os dados de treinamento. . . . . . . . . . 64
Figura 6.8 Resultado dos modelos NARX com os dados de validacao. . . . . . . . . . . . . 64
Figura 6.9 Dados do ensaio utilizado para identificacao do modelo do processo. . . 66
Figura 6.10 Comparacao do modelo identificado e o dados reais da malha de tempe-

ratura. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Figura 6.11 Comparacao do modelo identificado e o dados reais da malha de umi-
dade. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Figura 6.12 Resultado da simulacao da malha de temperatura com α = 0. . . . . . . . . . 68
Figura 6.13 Resultados da simulacao do controlador proposto. . . . . . . . . . . . . . . . . . . . . 69
Figura 6.14 Resultado do controlador pre-existente para temperatura durante o ensaio
do item 50.109 da norma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Figura 6.15 Resultado do controlador pre-existente para umidade durante o ensaio do
item 50.109 da norma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Figura 6.16 Resultado do controlador proposto durante o ensaio do item 50.109 da
norma(Temperatura). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Figura 6.17 Resultado do controlador proposto com mapeamento durante o ensaio do
item 50.109 da norma(Umidade). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Figura 6.18 Resultado do controlador GPC durante o ensaio do item 50.109 da norma. 76
Figura 6.19 Comportamento das temperaturas no ponto A e na saıda durante o ensaio
do item 50.109 da norma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Figura 6.20 Comportamento das umidades no ponto A e na saıda durante o ensaio do
item 50.109 da norma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Figura 6.21 Resultado do controlador proposto com mapeamento durante o ensaio do
item 50.109 da norma (Temperatura). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Figura 6.22 Resultado do controlador proposto com mapeamento durante o ensaio do
item 50.109 da norma(Umidade). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79

LISTA DE TABELAS
Tabela 2.1 Especificacoes dos resistores de aquecimento. . . . . . . . . . . . . . . . . . . . . . . . . . 22
Tabela 6.1 Resultados do ındice de desempenho do modelo Regressivo - Validacao 60
Tabela 6.2 Resultados do ındice de desempenho do modelo MLP - Validacao . . . . . 62
Tabela 6.3 Resultados do ındice de desempenho do modelo NARX - Validacao . . . 65
Tabela 6.4 Resultados do ındice de desempenho dos modelos - Validacao . . . . . . . . . 65
Tabela 6.5 Resultados do ensaio com a incubadora comercial - Tc = 32oC. . . . . . . . 72
Tabela 6.6 Resultados do ensaio com a incubadora comercial - Tc = 36oC. . . . . . . . 72
Tabela 6.7 Resultados do ensaio com a incubadora comercial . . . . . . . . . . . . . . . . . . . . . 72
Tabela 6.8 Resultados do ensaio com a Incubadora GPAR com o controlador proposto
- Tc = 32oC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Tabela 6.9 Resultados do ensaio com a Incubadora GPAR com o controlador proposto
- Tc = 36oC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Tabela 6.10 Resultados do ensaio com a Incubadora GPAR com controlador pro-
posto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Tabela 6.11 Resultados do ensaio com a incubadora com o controlador proposto utili-
zando o mapeamento - Tc = 32oC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80

Tabela 6.12 Resultados do ensaio com a incubadora com o controlador proposto utili-
zando o mapeamento - Tc = 36oC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Tabela 6.13 Resultados do ensaio com a incubadora com controlador proposto utili-
zando o mapeamento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80

LISTA DE SIMBOLOS
ρ Densidade do ar em kg ·m−3
c Calor especıfico em m3 · kg−1
v Volume em m3
H Trocas de calor por conveccao e irradiacao em W ·m−2 ·K−1
Si Area da superfıcie de contato em m2
T Temperatura do ar
n Vazao do ar em m3 · s−1
P (t) Potencia aplicada ao resistor de aquecimento em Watts
N Conjunto dos numeros naturais
R Conjunto dos numeros reais
y(k) Saıda do sistema,
ϕ(k) Vetor de regressores, onde ϕ = [y(k − 1); y(k − 2); . . . ; y(k − ny)],
θ Parametros a serem estimados
ξ(k) Incertezas ou erros do modelo
δli Gradiente local do neuronio i da camada l
hli Entrada do i-esimo neuronio na l-esima camada
g′(·) Derivada da funcao de ativacao
dui Saıda desejada do i-esimo neuronio
yli Saıda do i-esimo neuronio na l-esima camada

LISTA DE SIGLAS
ABNT Associacao Brasileira de Normas Tecnicas
ARMA Auto Regressive and Moving Average
ARMAX Auto Regressive Moving Average with eXogenous inputs
ARX Auto Regressive with eXogenous inputs
ARIMA Auto Regressive and Integrated Moving Average
ATC Temperatura de Ar Controlada
CARIMA Controlled Auto Regressive Integrated Moving Average
CPBM Controle Preditivo Baseado em Modelo
DEE Departamento de Engenharia Eletrica
ERR Taxa de Reducao do Erro
GPC Generalized Predictive Control
GPAR Grupo de Pesquisa em Automacao e Robotica
IEC International Electrotechnical Commission
ITC Temperatura Controlada do Recem-nascido
MIMO Multiple Input, Multiple Output
MISO Multiple Input, Single Output
MLP MultiLayer Perceptron
MSE Mean Squared Error
NARX Nonlinear AutoRegressive model with eXogenous Input
NARMAX Nonlinear Auto Regressive Moving Average with eXogenous inputs
NBR Norma da ABNT
PID Proporcional, Integral e Derivativo - Termos do controlador.
PWM Pulse Width Modulation
RNA Rede Neural Artificial
QP Quadratic Programming
SISO Single Input - Single Output
UR Umidade Relativa
ZOH Zero-Order Hold

xi
SUMARIO
1 INTRODUCAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.1 Motivacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3 Trabalhos relacionados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.4 Producao Cientıfica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.5 Organizacao da Dissertacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2 AVALIACAO DE INCUBADORASNEONATAIS SEGUNDO A
NORMA NBR IEC 60601-2/19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.1 Adapatacao da Incubadora Comercial . . . . . . . . . . . . . . . . . . . . . . . 20
2.1.1 Placa de Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.1.2 Placa de Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.1.3 Placa de Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.1.4 Software de Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2 Avaliacao de incubadoras neonatais segundo a norma NBR IEC
60601-2/19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3 Sistema de ensaio de incubadoras neonatais baseado na norma
NBR IEC 60601-2/19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.3.1 Sistema de Aquisicao de Dados . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.3.2 Dispositivo de Comunicacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.3.3 Software de Aquisicao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.4 Formulacao do Problema. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.5 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3 ESTRUTURAS DE MODELOS LINEARES PARA IDENTIFI-
CACAO DE PROCESSOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.1 Representacoes em tempo discreto para sistemas lineares. . . . . . . 39

3.2 Modelo da resposta finita ao impulso - FIR . . . . . . . . . . . . . . . . . . . 40
3.3 Modelo ARMAX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.4 O estimador dos mınimos quadrados . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.5 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4 ESTRUTURASDE MODELOS NAO-LINEARES PARA IDEN-
TIFICACA DE PROCESSOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.1 Modelo Polinomial NARMAX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.2 Redes Neurais Artificiais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.3 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5 CONTROLE PREDITIVO BASEADO EM MODELO . . . . . . . . . 50
5.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.2 GPC (Generalized Preditive Control) . . . . . . . . . . . . . . . . . . . . . . . 52
5.3 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6 ENSAIOS E RESULTADOS EXPERIMENTAIS . . . . . . . . . . . . . . 58
6.1 Modelos para Mapeamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6.1.1 Modelo Regressivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
6.1.2 Modelo MLP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.1.3 Modelo NARX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.1.4 Comentarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.2 Projeto do Controlador Preditivo . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.3 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.4 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
7 CONCLUSOES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
7.1 Comentarios Finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
7.2 Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85

13
1 INTRODUCAO
No Brasil, no ano de 2011, mais de 68% das mortes de criancas ate um ano de
idade ocorreram ate os vinte e oito primeiros dias de vida, segundo dados do Ministerio
da Saude (Datasus Ministerio da Saude, 2011). Os recem-nascidos de saude debilitada e/ou
prematuros tem grande dificuldade de regular a temperatura corporal devido a motivos
como: uma alta taxa de metabolismo provocada por condicao de enfermidade, menor
quantidade de tecido adiposo, alta relacao entre a superfıcie e o volume corporal que obriga
o recem-nascido a um alto gasto de energia por kilograma comparado a um adulto (ASKIN;
WILSON, 2003). Quando o neonato nao consegue manter sua temperatura, pode ter o
agravamento de sua condicao de saude, entrar em estado de coma, ou mesmo vir a obito.
As principais formas de perda de calor do recem-nascido sao: perdas por conducao, perdas
por evaporacao, perdas por conveccao e perdas por radiacao (REFORSUS, 2002).Neste
contexto, a incubadora neonatal tenta prover um ambiente com condicoes favoraveis ao
gasto mınimo de energia do neonato enquanto mantem a sua temperatura corporal dentro
da faixa normal, assim este ambiente pode ser definido como um ambiente termoneutro
(ARONE, 1993).
A norma tecnica brasileira NBR IEC 60.601-2/19 prove especificacoes mınimas
de desempenho para incubadoras neonatais no provimento de um ambiente seguro ao
recem-nascido. Estas especificacoes sao verificadas atraves de ensaios que incluem, por
exemplo, a analise dos sinais obtidos por sensores de temperatura e umidade em posicoes
especificadas pela norma (ABNT, 2000). Neste trabalho a modelagem matematica da
dinamica dos sinais de temperatura e umidade da incubadora neonatal e considerado
um fator importante para o desenvolvimento de controladores melhores e mais precisos,
que minimizem os riscos associados aos recem-nascidos instalados em incubadoras nas
unidades de tratamento em hospitais.
Do ponto de vista da teoria de controle, a incubadora pode ser vista como um
sistema TITO (Two Input, Two Output) com acoplamento, sendo a umidade e a tempera-
tura no interior da cupula da incubadora, as variaveis controladas. Atraves de modelos que
representem com maior fidelidade a dinamica do processo e possıvel projetar controlado-
res mais eficientes (CAMACHO; BORDONS, 1999). Entretanto a modelagem deste sistema
atraves de modelos fenomenologicos e uma tarefa complexa. Dos controladores utiliza-
dos em processos com caracterısticas lineares, o controlador preditivo e uma alternativa
que apresenta resultados muito promissores e de uso crescente na literatura (CAMACHO;
BORDONS, 1999) (ZERMANI; FEKI; MAMI, 2011a). Porem, o desempenho do controlador
preditivo e dependente do modelo identificado do processo (CAMACHO; BORDONS, 1999).

14
Assim, faz-se necessario um estudo para obtencao de modelos eficientes da incubadora que
satisfacam as especificacoes, estabelecidas em norma, para o funcionamento adequado do
equipamento.
1.1 Motivacao
A incubadora neonatal prove um microclima ideal que minimiza as perdas de
calor e agua do recem-nascido, condicao que e vital para a sobrevivencia e o correto
desenvolvimento do bebe prematuro ou com a saude debilitada. Para prover um ambiente
termicamente neutro para o neonato, uma incubadora tıpica realiza o controle de variaveis
como: temperatura, umidade e circulacao de ar no interior da cupula onde fica abrigado
o recem-nascido (ARONE, 1993). Usualmente o fluxo de ar e ajustado para um valor
constante, controlando-se somente a temperatura e umidade nos modelos mais atuais.
Assim e de suma importancia que o algoritmo de controle dos nıveis de temperatura e
umidade da incubadora seja apropriadamente projetado e aplicado.
A verificacao periodica do atendimento das normas pertinentes por parte da in-
cubadora, tambem e um fator importante para a manutencao da qualidade do tratamento
e da seguranca de recem nascidos que se utilizam das incubadoras neonatais. O presente
trabalha busca contribuir nestes dois aspectos, um vez que propoe um algoritmo de con-
trole das variaveis ambientais da incubadora e propoes um sistema para fazer a afericao de
incubadoras segundo a norma NBR IEC 60601-2/19. Os objetivos sao melhor detalhados
na proxima secao.
1.2 Objetivos
Essa dissertacao tem como objetivo principal o projeto de controladores preditivos
do tipo GPC para as malhas de temperatura e umidade de uma incubadora neonatal
comercial. Serao executados ensaios previstos pela norma NBR IEC 60.601-2/19 em duas
situacoes: (i) numa incubadora comercial com o seu controlador de fabrica, (ii) na mesma
incubadora comercial adaptada para a utilizacao do controlador objeto deste trabalho. Os
resultados obtidos serao comparados para verificar o desempenho do controlador projetado
diante de um controlador ja utilizado comercialmente. Como objetivo secundario deste
trabalho, serao realizados: (i) a obtencao de modelos da planta da incubadora neonatal,
utilizando tecnicas de identificacao lineares e nao-lineares e (ii) uma analise comparativa
entre os modelos construıdos. Serao obtidos dois tipos de modelos:
• O primeiro modelo relaciona a acao dos atuadores de controle da umidade e tempe-
ratura com os valores da temperatura e umidade no interior da incubadora.

15
• O segundo modelo descreve a relacao entre a temperatura e a umidade na saıda de
ar da incubadora com os valores medidos nas posicoes definidas pela norma NBR
IEC 60.601-2/19.
O primeiro modelo e utilizado na representacao do processo e e usado no projeto
do controlador, para este fim serao utilizados os modelos lineares ARMAX. O segundo
tipo de modelo faz o mapeamento entre a temperatura e umidade medidas pelo sensor
da incubadora e no ponto central do colchao a uma altura de 10cm. O uso de modelos
para o mapeamento e necessario devido ao fato de que o controle da incubadora e feito
utilizando-se um sensor de temperatura e umidade no alto da cupula enquanto que durante
os ensaios da norma estas medidas sao tomadas por um sensor posicionado no centro do
colchao. Uma vez que as medidas de temperatura e umidade no centro do colchao e
no alto da cupula sao sistematicamente diferentes, as estimativas geradas pelo modelo de
mapeamento podem ser usadas pelo controlador preditivo visando melhorar o desempenho
deste em relacao a norma. Para a estimacao dos modelos de mapeamento serao usadas
tecnicas lineares e nao-lineares.
Visando satisfazer o objetivo principal desta dissertacao foram identificados os
seguintes objetivos adicionais:
• Construcao de um sistema de hardware e software para coletar os dados de tem-
peratura e umidade da incubadora e realizar os ensaios definidos pela norma NBR
IEC 60.601-2/19.
• Construcao de um sistema de hardware e software para realizar o controle de tem-
peratura e umidade em uma incubadora neonatal comercial.
1.3 Trabalhos relacionados
Para o desenvolvimento desta dissertacao foi realizado um levantamento dos tra-
balhos publicados que abordam a identificacao e controle de incubadoras neonatais, bem
como trabalhos sobre a construcao de equipamentos para a realizacao de ensaios previstos
da norma NBR IEC 60.601-2/19.
Dentre os trabalhos que abordam sistemas de ensaio para validacao de incubado-
ras perante a norma, estudou-se os seguintes trabalhos:
• Um sistema de avaliacao de desempenho e mostrado em Agostini (2003), este sis-
tema utiliza uma comunicacao pela porta paralela de um computador para a leitura
dos sensores por um aplicativo de controle instalado em um PC, onde sao mos-
trados relatorios em texto sobre o desempenho da incubadora durante os ensaios

16
proposto pela norma. Tambem sao descritos em Agostini (2003), os principais en-
saios da norma relativo ao comportamento da temperatura e umidade no interior
da incubadora neonatal.
• O trabalho mostrado em Oliveira (2007), tambem propoe um sistema de avaliacao
de desempenho de incubadoras neonatais. Em Oliveira (2007) o autor melhora
o sistema proposto em Agostini (2003) incorporando novas tecnologias ao sistema
de monitoramento, como comunicacao via Bluetooth, interface grafica em Java e
sensores de temperatura e umidade mais atuais. O autor teve sucesso na construcao
do sistema, apresentando como resultados um ensaio executado em uma incubadora
neonatal real.
O desenvolvimento desta dissertacao tomou como base os trabalhos descritos em
Agostini (2003) e Oliveira (2007), para a construcao de um sistema avaliador de desem-
penho de incubadoras neonatais com base na norma NBR IEC 60.601-2/19, que e um dos
objetivos especıficos deste trabalho. Este trabalho aprofunda mais o que foi apresentado
pelos autores anteriormente citados, no sentido de que o sistema avaliador e usado para
comparar o desempenho entre uma incubadora comercial e a mesma incubadora com um
controlador desenvolvido como objetivo desta dissertacao.
Para a identificacao do processo da incubadora neonatal e projeto do controlador
para esta, os seguintes trabalhos foram analisados:
• Em Santos (2010), a autora aborda a identificacao dos sinais da incubadora, tanto
para controle como para mapeamento, utilizando tecnicas lineares e nao-lineares,
e realizando uma comparacao destas tecnicas. Dentre as tecnicas nao-lineares, fo-
ram estudas as redes neurais artificiais, especificamente a MLP (HAYKIN, 2008), e
modelos NARX e NARMAX.
• Em Neto (2010), o autor constroi um prototipo de incubadora neonatal e realiza
um controle PI multivariavel para o processo de temperatura e umidade relativa
do ar. Sao mostradas duas tecnicas de ajuste do controlador PI, e e demonstrado
que o controlador projetado consegue atingir certos criterios da norma NBR IEC
60.601-2/19.
• Em Zermani, Feki e Mami (2011a), o autor utiliza algoritmos geneticos para estimar
os parametros de um modelo NARMAX na identificacao do processo da malha de
umidade de incubadora neonatal, sem levar em conta a interacao com a temperatura.
De posse do modelo sao projetados dois controladores: (i) um PID ajustado atraves
de algoritmos geneticos e (ii) um MPC tambem ajustado por algoritmos geneticos.

17
Sao apresentados resultados de simulacoes onde e demonstrado que o controlador
MPC tem um desempenho superior ao PID.
• Em (ZERMANI; FEKI; MAMI, 2011b), o autor projeta um controlador adaptativo pre-
ditivo do tipo IAGPC para a malha de temperatura da incubadora neonatal. Neste
trabalho o processo e identificado por uma estrutura ARX, onde seus parametros
sao atualizados em tempo real para se adequar a alteracoes do processo. O autor faz
uma comparacao entre tres controladores : (i) ON-OFF , (ii) PID e o (iii) IAGPC.
E demonstrado atraves de resultados experimentais que o IAGPC e o mais eficiente
dentre os controladores comparados.
Os trabalhos mostrados em Santos (2010) e Neto (2010) que foram desenvolvi-
dos pelo grupo Incubadora do laboratorio GPAR, utilizando um prototipo da incubadora
neonatal construıdo como objeto do trabalho de Neto (2010). Alguns criterios da norma
nao puderam ser avaliados devido a restricoes de funcionamento do prototipo. O presente
trabalho busca avancar nas pesquisas realizadas pelo grupo, investigando a identificacao
de modelos e projeto de controladores sobre uma incubadora neonatal comercial que foi
transformada em uma plataforma de estudo deste processo como objeto deste trabalho
e com a criacao de um sistema de avaliacao de desempenho independente que pode ser
utilizado em outras incubadoras. Com isso buscou-se comparar novas tecnicas de iden-
tificacao, como modelo nao-linear NARX e modelos lineares FIR e compara-las com os
resultados obtidos pelas redes MLP no mapeamento de temperaturas mostrados em San-
tos (2010), bem como avaliar criterios da norma que nao foram avaliados em Neto (2010)
devido a limitacoes no resistor de aquecimento do prototipo.
1.4 Producao Cientıfica
Durante a realizacao desta dissertacao foram produzidos dois artigos tecnicos
cientıficos em torno do tema abordado por esta em congressos cientıficos. Os trabalhos
sao listados abaixo:
• ALBUQUERQUE, A. A. M. et al. Artificial neural networks in the estimation of
measures of temperature and humidity inside a neonatal incubator. In: HUFFEL,
S. V. et al. (Ed.). BIOSIGNALS. SciTePress, 2012. p. 276.281. ISBN 978-989-
8425-89-8 (ALBUQUERQUE et al., 2012a).
• ALBUQUERQUE, A. A. M. et al. Sistema Automatico de Avaliacao de Desempenho
de Incubadoras Neonatais, segundo a norma NBR IEC 60.601-2-19. In: ANAIS DO
XXIII CONGRESSO BRASILEIRO DE ENGENHARIA BIOMEDICA (CBEB).
[S.l.: s.n.], 2012 (ALBUQUERQUE et al., 2012b).

18
1.5 Organizacao da Dissertacao
O desenvolvimento desta dissertacao segue a seguinte sequencia de capıtulos,
conforme e mostrado abaixo:
• Capıtulo 2: Neste capıtulo sao abordados a descricao da incubadora neonatal e
os pontos relevantes da norma NBR IEC 60.601-2/19 usados neste trabalho bem
como a descricao dos sistemas de ensaio e de controle construıdos como objeto desta
dissertacao.
• Capıtulo 3: Neste capıtulo sao abordadas tecnicas de identificacao lineares para
modelos SISO (Single Input, Single Output), onde sao contemplados os modelos
FIR e ARMAX.
• Capıtulo 4: Neste capıtulo sao abordadas tecnicas de identificacao nao-lineares de
modelos, onde sao contemplados os modelos MLP e NARX.
• Capıtulo 5: Neste Capıtulo e apresentada a fundamentacao teorica do controlador
preditivo desenvolvido nesta dissertacao.
• Capıtulo 6: Neste capıtulo sao mostrados os ensaios realizados e os modelos obtidos
utilizando as tecnicas de identificacao abordadas nos capıtulos 3 e 4. Os desempe-
nhos dos modelos sao comparados e discutidos. O projeto do controlador e apresen-
tado, e os resultados experimentais sao comparados com a incubadora comercial.
• Capitulo 7: Neste capıtulo estao as conclusoes finais a respeito dos resultados obti-
dos, e sao apresentadas propostas para trabalhos futuros, no ambito desta disserta-
cao.

19
2 AVALIACAO DE INCUBADORAS NEONATAIS SEGUNDO ANORMA NBR IEC 60601-2/19
A incubadora neonatal e um equipamento medico, que tem como principal funcao
prover uma ambiente termo-neutro auxiliando o tratamento de recem nascidos prematu-
ros. A incubadora prove este ambiente termo-neutro atraves do controle da temperatura
e da umidade internas do compartimento reservado ao neonato. Para realizar o controle
destas variaveis ambientais as incubadoras possuem sensores de temperatura e/ou umi-
dade, atuadores geralmente na forma de resistor de aquecimento e resistor de vaporizacao
ou nebulizadores e interface de operacao na forma de botoes, leds e displays e unidade
de controle. Em uma incubadora tıpica, atraves da leituras dos sensores, a unidade de
controle aciona os atuadores de modo que as grandezas de temperatura e umidade alcan-
cem os valores ajustados na interface de controle pelo usuario (IAIONE; MORAES, 2002).
A Figura 2.1 mostra os principais elementos de um incubadora neonatal tıpica.
Figura 2.1: Incubadora comercial tıpica.
Fonte: (AGOSTINI, 2003)
O laboratorio GPAR (Grupo de Pesquisa em Automacao e Robotica), localizado
no Departamento de Engenharia Eletrica da Universidade Federal do Ceara, adquiriu uma
incubadora neonatal comercial para fins de estudo e pesquisa. Esta incubadora dispoe de
um sistema eletronico microprocessado que controla o nıvel de temperatura e umidade
relativa no interior da cupula, entretanto o sistema eletronico da incubadora nao dispo-
nibiliza de forma digital os valores aplicados aos atuadores e as medidas do sensor de
temperatura e umidade. Dado o exposto, decidiu-se construir um sistema eletronico de
controle proprio aproveitando ao maximo as conexoes presentes na incubadora comercial
para a aplicacao do controlador projetado nesta dissertacao. De modo a facilitar o en-
tendimento do leitor, doravante a incubadora comercial com seu controlador original de

20
fabrica, sem nenhuma intervencao, sera denominada Incubadora Comercial, enquanto
que a incubadora apos as modificacoes para a utilizacao do controlador proposto neste
trabalho sera denominada Incubadora GPAR.
Neste capıtulo e descrito toda a plataforma construıda e os aspectos da norma
relevantes para execucao dos objetivos especificados no Capıtulo 1. A Secao 2.1 descreve
a adaptacao realizada na incubadora comercial para a aplicacao do controlador preditivo.
A Secao 2.2 descreve os requisitos para as variaveis de temperatura e umidade impostos
pela norma os quais as incubadoras devem seguir. Ja a Secao 2.3 descreve a construcao do
sistema de ensaios para validar o controlador proposto. O capıtulo e encerrado com a for-
mulacao do problema a ser investigado neste trabalho na Secao 2.4 e com as consideracoes
finais sobre o exposto no capıtulo na Secao 2.5.
Figura 2.2: Incubadora comercial utilizada no desenvolvimento deste trabalho.
Fonte: Proprio Autor
2.1 Adapatacao da Incubadora Comercial
A Incubadora Comercial realiza o controle da temperatura da cupula onde fica
o recem-nascido atraves de um resistor de aquecimento em conjunto com um sistema de
circulacao de ar. O controle da umidade relativa do ar no interior da cupula e realizado
atraves do vapor d’agua produzido em funcao do aquecimento de uma porcao de agua
presente em um reservatorio da incubadora. Para efetuar o aquecimento desta agua, o
sistema de controle atua em um resistor de aquecimento mergulhado neste reservatorio.
Assim, o ar quente e o vapor d’agua gerados sao colocados no sistema de circulacao de
ar e chegam ate a cupula. No alto da cupula, proximo a entrada de ar, esta localizado
um sensor integrado de umidade e temperatura do tipo SHT11 (SENSIRION, 2010a). Este
sensor e utilizado no sistema de controle para que este atue nos resistores de aquecimento
e umidificacao, de forma a alcancar temperatura e umidade informadas pelo operador. A
Figura 2.3 mostra um esquema geral do funcionamento da incubadora.

21
Figura 2.3: Visao geral do funcionamento da incubadora comercial.
Fonte: Proprio Autor
De posse destas informacoes foi construıdo um sistema de controle com as seguin-
tes caracterısticas:
• Uma placa de potencia para realizar o acionamento das resistencias de aquecimento
e umidificacao, e acionar os motores do sistema de ventilacao.
• Uma placa de controle capaz de: (i) ajustar a energia entregue aos resistores de
aquecimento e umidificacao, (ii) realizar a leitura do sensor SHT11 e (iii) ter comu-
nicacao sem fio com um software de controle no PC.
• Uma placa de comunicacao para realizar a interface entre a placa de controle e o
PC.
• Um software de controle capaz de receber leituras do sensor da placa de controle
e enviar comandos para a placa de controle atuar nos resistores de aquecimento e
umidificacao.
A Figura 2.4 mostra um visao geral do sistema de controle desenvolvido. Nas sub-
secoes seguintes serao descritas as partes do sistema eletronico de controle da Incubadora
GPAR.
2.1.1 Placa de Potencia
A incubadora possui dois resistores de potencia para o controle da temperatura
e umidade com as seguintes especificacoes mostradas na Tabela 2.1.

22
Figura 2.4: Visao geral do sistema de controle desenvolvido.
Fonte: Proprio Autor
Tabela 2.1: Especificacoes dos resistores de aquecimento.Resistor Tensao Nominal Potencia
Aquecimento de Ar 110 Volts 350 W
Aquecimento de Agua 110 Volts 200 W
O controle da temperatura do ar e da producao de vapor d’agua e realizado au-
mentando ou diminuindo a potencia entregue aos resistores de aquecimento. A forma
adotada para regular esta potencia foi atraves da modulacao da tensao eficaz a qual o
resistor esta submetido, em um circuito conhecido na literatura como gradador (RASHID,
1999)(BARBI, 1986). Para resolver esta questao foi desenvolvida uma placa de potencia
com um circuito gradador para cada um dos resistores e um circuito detector de cruza-
mento por zero da tensao alternada. Alem destes circuitos, adicionou-se um circuito de
uma fonte de 5V, com o objetivo de suprir a alimentacao da placa de controle descrita pos-
teriormente. O componente principal do circuito gradador utilizado e o TRIAC BT138,
onde a modulacao da tensao eficaz sobre o resistor e realizado variando-se o tempo de dis-
paro de um pulso de corrente sobre o terminal gate do BT138. O tempo de disparo varia
entre 0 e 8,33 milisegundos, tomando como referencia o cruzamento por zero da tensao
alternada a qual o resistor esta submetido. O acionamento do BT138 e feito atraves de
um optoacoplador do tipo MOC3021, para isolar a parte de potencia do circuito da parte
digital. O esquematico do circuito gradador desenvolvido e mostrado na figura 2.5:
O circuito de deteccao de passagem por zero utiliza um fotoacoplador do tipo
4N25, gerando um pulso com tensao de 5V a cada passagem por zero da tensao alternada
de entrada. Este pulso e utilizado para sincronizar o acionamento do TRIAC dos circuitos

23
Figura 2.5: Esquema eletrico do circuito gradador utilizado.
Fonte: Proprio Autor
gradadores. Este circuito e mostrado na Figura 2.6.
Figura 2.6: Esquema eletrico do circuito de deteccao de passagem por zero.
Fonte: Proprio Autor
O circuito da fonte de alimentacao tem uma tensao de saıda de 5V, com o objetivo
de suprir a placa de controle e alguns circuitos da propria placa de potencia. A fonte
tem como tensao de entrada uma tensao alternada de 14 volts eficaz, fornecida por um
transformador ja disponıvel na estrutura da incubadora. Apos um estagio de retificacao
com filtro (mostrado no circuito de sincronismo) e utilizado um regulador de tensao 7805
para garantir uma tensao estabilizada de 5V na saıda da fonte. O esquematico do circuito
da fonte e mostrado na Figura 2.7.
O sinal de sincronismo e as portas dos acionamentos do optoacopladores, e saıda
da tensao da fonte de alimentacao sao ligadas a um conector externo, que sera ligado via
cabo a placa de controle que e descrita a seguir.

24
Figura 2.7: Esquema eletrico da fonte de 5V.
Fonte: Proprio Autor
2.1.2 Placa de Controle
A placa de controle foi desenvolvida com o objetivo de realizar a leitura do sensor
de temperatura e umidade SHT11, gerenciar a potencia sobre os resistores de aquecimento,
e ter uma comunicacao sem fio com o software de controle e supervisao instalado em um
PC. Esta placa inclui ainda um display LCD alfanumerico que mostra informacoes sobre
a temperatura e umidade, e a porcentagem do sinal de controle aplicado aos atuadores.
Uma visao geral da placa de controle e mostrada na Figura 2.8.
Figura 2.8: Visao geral dos principais elementos da placa de controle.
Fonte: Proprio Autor
A parte principal da placa de controle, chamada de unidade de processamento, e
responsavel por processar as leituras do sensor de umidade e temperatura SHT11, gerar
os sinais de controle para o acionamento das resistencias atraves da placa de potencia
e executar o protocolo de comunicacao com o software de controle atraves do modulo
de comunicacao sem fio. Esta unidade e constituıda por um microcontrolador do tipo

25
dsPIC30F4013. Seguem algumas caracterısticas deste dispositivo que pesaram na sua
escolha:
• Desempenho de ate 30 MIPS (Milhoes de Instrucoes por Segundo)
• Perifericos: USART, Modulo CCP e SPI.
Apesar do problema proposto para a placa de controle poder ser resolvido por um
microcontrolador de menor desempenho, escolheu-se o dsPIC30F4013 como forma de pos-
sibilitar e facilitar a implementacao de algoritmos de controle mais complexos diretamente
no microcontrolador em trabalhos futuros.
Para a comunicacao com o software de controle, optou-se por utilizar uma comu-
nicacao sem fio para aproximar o uso do sistema a realidade de uma UTI neonatal, onde
o uso de cabos de comunicacao com um PC seria uma solucao impraticavel. Para aten-
der este requisito e utilizado um modulo de radio MRF24J40MA, fabricado pela empresa
MICROCHIP c©. Este modulo foi desenvolvido para ser compatıvel com o padrao IEEE
802.15.4, especialmente indicado para aplicacoes sem fio de baixa potencia e pequenas
taxas de transmissao (SOCIETY, 2009), adequando-se a problematica desta dissertacao.
Esse dispositivo se comunica com o microcontrolador por meio de uma interface SPIr.
O sensor SHT11 ja faz parte da estrutura da incubadora, estando posicionado no
alto da cupula do lado da entrada de ar como mostrado na Figura 2.9. Este componente
possui sensores de temperatura e umidade, assim como conversores A/D internos e tem
como saıda uma palavra digital correspondente aos valores por ele lidos. A comunicacao
e feita por uma interface serial sıncrona a dois fios em um padrao proprio ligado a dois
pinos de entrada e saıda do microcontrolador.
Figura 2.9: Localizacao do sensor SHT11 na cupula da incubadora.
Fonte: Proprio Autor

26
A placa de controle conta ainda com um display LCD alfanumerico de 4 linhas por
20 colunas que mostra as leituras atuais de umidade e temperatura da cupula da incuba-
dora, e os valores instantaneos da acao de controle aplicada aos resistores de aquecimento
e do sistema de umidade. A Figura 2.10 mostra as informacoes exibidas no display du-
rante o funcionamento da Incubadora GPAR. O software de controle se comunica com a
placa de controle seguindo um protocolo de comunicacao desenvolvido.
Figura 2.10: Informacoes exibidas pela display durante o funcionamento do sistema.
Fonte: Proprio Autor
2.1.3 Placa de Interface
Para a comunicacao com o PC, foi desenvolvida uma placa de interface vista na
Figura 2.16, composta por um microcontrolador PIC18F2550 acoplado a outro modulo
MRF24J40MA. A escolha desse microcontrolador deveu-se a sua caracterıstica de possuir
uma porta de comunicacao USB 2.0. E atraves desta placa que o computador recebe e
envia informacoes para a placa de controle situada dentro da incubadora. A comunicacao
USB foi escolhida por ser largamente utilizada, substituindo as antigas portas seriais e
paralelas.
Figura 2.11: Placa de interface de comunicacao entre a placa de controle e o computador.
Fonte: Proprio Autor

27
2.1.4 Software de Controle
O Software de Controle foi desenvolvido utilizando o software MATLABr, sem
utilizacao de interface grafica com o intuito de favorecer o desenvolvimento e execucao de
diferentes tipos de algoritmos de controle. Para a comunicacao com a placa de controle
sao utilizadas tres funcoes descritas a seguir:
Funcao Ajusta PWM temperatura (Ajuste): Esta funcao passa um valor da varia-
vel Ajuste para ser aplicada no resistor de aquecimento do ar. A variavel Ajuste
pode variar entre 0 e 100, onde o valor 0 significa nenhuma potencia entregue a
resistencia e o valor 100 indica a potencia maxima sendo aplicada.
Funcao Ajusta PWM umidade (Ajuste): Esta funcao passa um valor da variavel
Ajuste para ser aplicada no resistor de aquecimento da agua. A variavel Ajuste
pode variar entre 0 e 100, onde o valor 0 significa nenhuma potencia entregue a
resistencia e o valor 100 indica a potencia maxima sendo aplicada.
Funcao Le Sensor SHT11(): Esta funcao retorna os valores atuais da temperatura e
umidade.
A partir destas funcoes foi desenvolvido um algoritmo para aplicacao de um controlador
generico ao processo da incubadora neonatal. Este algoritmo pode ser descrito atraves
dos seguintes passos:

28
O algoritmo utilizado foi pensado para ser facilmente modificado para se utilizar
outros tipos de controladores alterando apenas a lei de controle calculada no passo nove.
Essa caracterıstica vem a ser uma contribuicao ao laboratorio GPAR, no sentido que o
conjunto do sistema de software e hardware construıdo como objeto deste trabalho, pode
ser usado para o estudo de outros controladores e tecnicas de identificacao para o pro-
cesso da incubadora neonatal. Para avaliar o desempenho do controlador desenvolvido,
resolveu-se utilizar parametros definidos na norma NBR IEC 60601-2/19, que define re-
quisitos mınimos de seguranca e qualidade para as incubadoras neonatais comercializadas
no Brasil. A proxima secao aborda os procedimentos da norma que sao utilizados por
este trabalho.
2.2 Avaliacao de incubadoras neonatais segundo a norma NBR IEC 60601-
2/19
Os parametros de qualidade e seguranca que as incubadoras neonatais comerciali-
zadas no Brasil devem respeitar sao definidos pela norma NBR IEC 60601-2/19: “Requeri-
mentos particulares para a seguranca de incubadoras neonatais”. Esta norma e adaptada
da norma internacional IEC 60601-2/19. Entre outros parametros a norma determina
os requisitos de variacao das variaveis ambientais da incubadora neonatal, tais como a
temperatura, umidade, velocidade do fluxo de ar e nıvel de ruıdo sonoro. Neste trabalho
foi enfocado somente os requisitos da norma relativos ao comportamento da temperatura
e umidade relativa do ar, uma vez que estas grandezas tem grande influencia no desenvol-
vimento do neonato (ARONE, 1993) e do ponto de vista do controle formam um processo
interessante de ser estudado, como mostrado no Capıtulo 1.
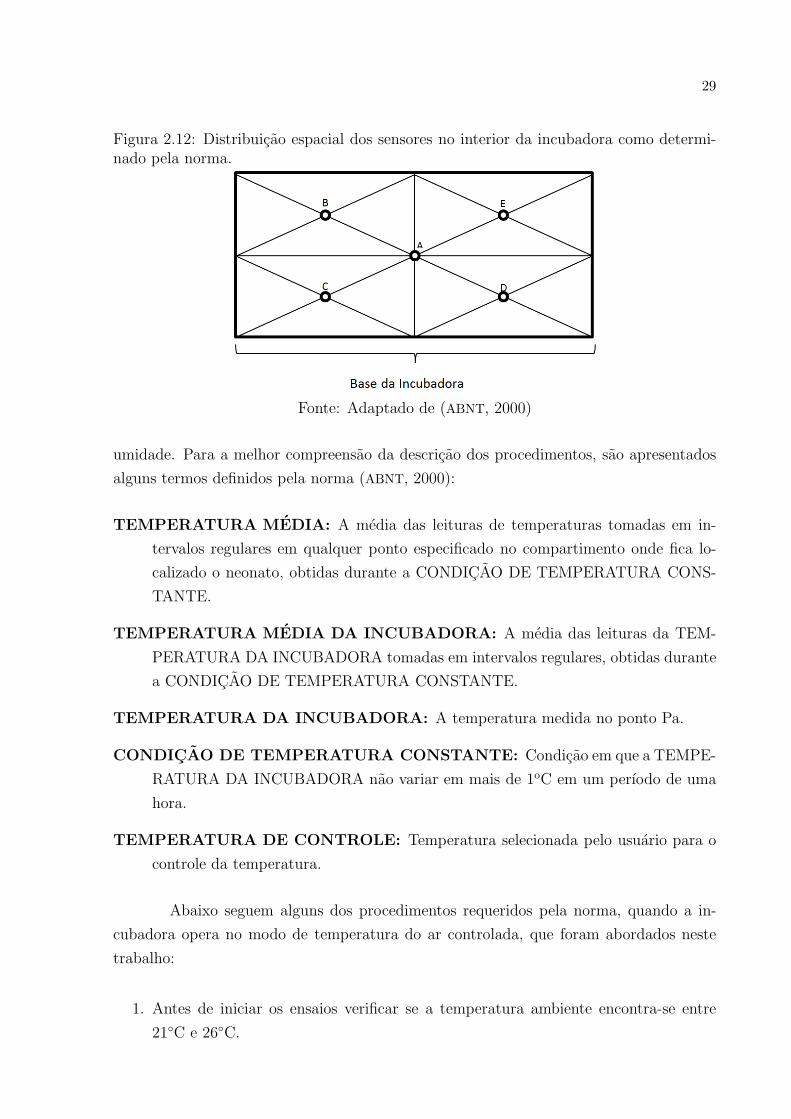
Para a realizacao das medicoes de temperatura e umidade relativa do ar, a norma
determina cinco posicoes dentro da incubadora onde deverao ficar situados os sensores
destas grandezas. Os sensores sao distribuıdos sobre um plano paralelo 10 cm acima do
colchao. A primeira posicao, denominada de posicao A (Pa) e a posicao central do colchao,
ou seja, o ponto formado pelo encontro das duas diagonais do quadrilatero formado pelo
colchao. A partir da divisao do plano do colchao em quatro quadrilateros iguais formados
pelas duas mediatrizes do quadrilatero formado pelo perımetro do colchao, temos que
as posicoes restantes denominadas B (Pb), C (PC), D (Pd), E (Pe), estao situadas no
encontro das diagonais de cada um dos quatro quadrilateros. O desenho da distribuicao
espacial dos sensores e mostrada na Figura 2.12.
A norma determina que a temperatura seja medida nos pontos: Pa, Pb, Pc, Pd
e Pe, e a umidade relativa do ar seja medida no ponto Pa. A norma determina uma
serie de procedimentos para aferir o desempenho do sistema de controle de temperatura e
29
Figura 2.12: Distribuicao espacial dos sensores no interior da incubadora como determi-nado pela norma.
Fonte: Adaptado de (ABNT, 2000)
umidade. Para a melhor compreensao da descricao dos procedimentos, sao apresentados
alguns termos definidos pela norma (ABNT, 2000):
TEMPERATURA MEDIA: A media das leituras de temperaturas tomadas em in-
tervalos regulares em qualquer ponto especificado no compartimento onde fica lo-
calizado o neonato, obtidas durante a CONDICAO DE TEMPERATURA CONS-
TANTE.
TEMPERATURA MEDIA DA INCUBADORA: A media das leituras da TEM-
PERATURA DA INCUBADORA tomadas em intervalos regulares, obtidas durante
a CONDICAO DE TEMPERATURA CONSTANTE.
TEMPERATURA DA INCUBADORA: A temperatura medida no ponto Pa.
CONDICAO DE TEMPERATURA CONSTANTE: Condicao em que a TEMPE-
RATURA DA INCUBADORA nao variar em mais de 1oC em um perıodo de uma
hora.
TEMPERATURA DE CONTROLE: Temperatura selecionada pelo usuario para o
controle da temperatura.
Abaixo seguem alguns dos procedimentos requeridos pela norma, quando a in-
cubadora opera no modo de temperatura do ar controlada, que foram abordados neste
trabalho:
1. Antes de iniciar os ensaios verificar se a temperatura ambiente encontra-se entre
21◦C e 26◦C.

30
2. Ajustar a temperatura de controle da incubadora para 11◦C acima da temperatura
ambiente. A incubadora deve atingir a temperatura de controle no tempo especifi-
cado pelo fabricante, com uma tolerancia de 20%.
3. Ajustar a temperatura de controle da incubadora para dois pontos de operacao, 32◦C
e 36◦C. Em cada ponto de operacao, aguardar a CONDICAO DE TEMPERATURA
CONSTANTE.
4. Em relacao ao procedimento tres, a TEMPERATURA MEDIA dos sensores nas po-
sicoes PA, PB, PC, PD e PE nao podem diferir em mais de 0,8◦C da A TEMPERA-
TURA MEDIA DA INCUBADORA durante o perıodo de uma hora, com o colchao
em posicao normal e 1oC com o colchao inclinado. A TEMPERATURA MEDIA
DA INCUBADORA nao deve diferir da temperatura de controle em ±1, 5oC.
5. Com a TEMPERATURA DA INCUBADORA na CONDICAO DE TEMPERA-
TURA CONSTANTE em 32◦C, ajustar a temperatura de controle para 36◦C e
verificar se a sobre-elevacao da temperatura fica abaixo de 2◦C e se o tempo para
alcancar a nova CONDICAO DE TEMPERATURA CONSTANTE e menor que
quinze minutos, a partir da primeira passagem por 36oC.
6. O valor da umidade mostrado pela incubadora nao deve diferir em mais de 10 % do
valor medido pelo sensor na posicao A, durante todo o funcionamento da incubadora.
Para avaliar o desempenho do controlador projetado, e do controlador da in-
cubadora comercial em relacao a norma, foi desenvolvido um sistema de avaliacao de
desempenho que fosse capaz de executar os ensaios descritos nesta secao. Na Secao 2.3
sao descritos os aspectos de construcao e funcionamento deste sistema.
2.3 Sistema de ensaio de incubadoras neonatais baseado na norma NBR IEC
60601-2/19
Um sistema de ensaio de desempenho foi desenvolvido de modo que pudesse ser
colocado na incubadora a fim de realizar medidas de temperatura e umidade seguindo
as especificacoes descritas na norma NBR IEC 60601-2/19 (ABNT, 2000). O sistema
construıdo dispoe de tres partes principais:
1. Um sistema de aquisicao de dados, acoplado em uma base de acrılico com sensores
de temperatura e umidade dispostos como especifica a norma, e com comunicacao
sem fio.

31
2. Um dispositivo para recepcao de dados enviados pelo sistema de aquisicao, que e
acoplado a computador do tipo PC, atraves de uma porta USB.
3. Um software no PC para requisitar e armazenar as leituras feitas pelo sistema de
aquisicao de dados.
Figura 2.13: Diagrama da visao geral do sistema
Fonte: Proprio Autor
A Figura 2.13 mostra uma visao geral do sistema cujo funcionamento ocorre da
seguinte forma: o software no computador faz uma requisicao, via USB, para o dispositivo
de comunicacao, que por sua vez repassa essa requisicao ao sistema de aquisicao de dados
que faz a leitura dos sensores e a envia de volta para o software no PC por meio do
dispositivo de comunicacao ligado a USB. A seguir sera detalhado o funcionamento de
cada parte do sistema.
2.3.1 Sistema de Aquisicao de Dados
O sistema de aquisicao de dados e formado por uma base de acrılico, cinco sensores
dispostos conforme a recomendacao da norma (Secao 2.2) e uma placa de controle. Nos
pontos B, C, D, E, sao utilizados sensores de temperatura do tipo MCP9808 (MICROCHIP,
2011) e na posicao A um sensor integrado de temperatura e umidade do tipo SHT75
(SENSIRION, 2010b), a base de acrılico foi projetada de modo que o sensor central (ponto
A) estivesse no centro do colchao da incubadora, os outros sensores estariam na posicao
correta. A Figura 2.14 mostra o projeto da base do sistema de aquisicao de dados.
Fixada na extremidade da base, proximo aos sensores das posicoes B e C, esta
a placa de controle do sistema de aquisicao de dados. Esta placa dispoe de um micro-
controlador do modelo PIC18LF2620 onde todos os sensores sao conectados por meio de

32
Figura 2.14: Projeto da base do sistema de aquisicao de dados da incubadora neonatal
Fonte: Proprio Autor
cabos. Os sinais gerados pelos sensores MCP9808 sao lidos atraves do periferico de co-
municacao I2C do microcontrolador, cada sensor recebe um endereco entre 0 e 3. Ja o
sensor SHT75 tem sua saıda em formato digital e enviado atraves de um protocolo de
comunicacao proprietario, por este motivo e ligado ao microcontrolador por meio de dois
pinos de E/S. A placa de controle dispoe ainda de um radio modelo MRF24J40MA por
onde recebe requisicoes e envia as medidas de leituras dentro de um protocolo especificado
para o sistema de software instalado no PC.
Figura 2.15: Foto do sistema de aquisicao de dados desenvolvido. (Detalhe: SensorMCP9808)
Fonte: Proprio Autor
2.3.2 Dispositivo de Comunicacao
O dispositivo de comunicacao atua como uma interface entre o sistema de aquisi-
cao de dados e o software instalado no PC. O dispositivo de comunicacao repassa os
comandos enviados pelo software via comunicacao USB e encaminha este comando para o
sistema de comunicacao de dados via comunicacao sem fio, assim como recebe as leituras

33
do sistema de aquisicao de dados via radio. Apesar de ser conectado a porta USB, convem
observar que o dispositivo de comunicacao e reconhecido pelo computador como uma porta
de comunicacao serial, facilitando assim seu uso pelo software de aquisicao.
Figura 2.16: Placa de interface de comunicacao entre a placa de controle e o computador.
Fonte: Proprio Autor
2.3.3 Software de Aquisicao
O software de operacao do sistema de ensaio foi escrito em Matlabre e apresen-
tado em uma interface grafica de modo a facilitar a interacao com o operador do ensaio.
A interface desenvolvida (Figura 2.17) opera de dois modos: o primeiro modo mede a
temperatura e umidade relativa interna da incubadora durante o intervalo de tempo se-
lecionado no menu tempo de aquisicao e o segundo modo realiza o teste de validacao da
incubadora baseado nos requisitos da norma.
Figura 2.17: Layout da interface grafica desenvolvida.
Fonte: Proprio Autor
Inicialmente o usuario deve selecionar a porta serial e a taxa de transferencia de
dados (baud rate). Em seguida seleciona-se o tempo de amostragem. Caso for realizar o

34
teste de validacao, nao ha a necessidade de selecionar o tempo de aquisicao. Selecionadas
as configuracoes, o programa estara pronto para estabelecer comunicacao com o micro-
controlador, para isso basta clicar no botao ON/OFF (modo 1) ou Teste1, Teste 2 (modo
2). A marcacao circular na parte de cima da Figura 2.17 aponta 2 submenus: (i) Reset,
que encerra a execucao do programa e reseta as configuracoes selecionadas, e (ii) Sair,
que fornece a opcao de gerar um arquivo (formato,”. txt”) com os resultados do processo
de validacao da incubadora antes de fechar a interface grafica. A marcacao quadrada no
centro da Figura 2.17 realca a saıda dos seguintes dados atualizados: (i) a quantidade de
amostras coletadas, (ii) a temperatura da incubadora e (iii) a umidade relativa do ar. A
marcacao na parte inferior da Figura 2.17 destaca os botoes de selecao que possibilitam
realizar os procedimentos da norma descritos na Secao 2.2. Selecionando o botao ’teste 1’
os procedimentos 1 e 2 serao realizados. Os demais sao realizados quando o botao ’teste
2’ e selecionado. Ao lado dos botoes descritos, ha uma area que informa ao operador o
procedimento em execucao.
Esta secao descreveu o sistema de avaliacao de desempenho de incubadoras ne-
onatais desenvolvido como objeto deste trabalho, enquanto que a Secao 2.1 descreveu
a adaptacao realizada na Incubadora Comercial para a implementacao do controlador
proposto e ainda a Secao 2.2 descreveu os procedimentos da norma para avaliacao da
temperatura e umidade relativa do ar no interior da incubadora. Baseado nas informa-
coes descritas nestas secoes a proxima secao busca formalizar o problema que este trabalho
busca solucionar.
2.4 Formulacao do Problema
O projeto de um controlador preditivo para o processo de umidade e temperatura
da incubadora que atenda aos requisitos da norma, e objetivo principal desta dissertacao.
Para se conseguir este objetivo, os seguintes problemas devem ser solucionados:
• Obtencao de modelos lineares que representem a dinamica do processo da incuba-
dora. Estes modelos sao identificados com base nas leituras dos sensores de umidade
e temperatura (variaveis controladas) presente na saıda de ar da incubadora, os va-
lores aplicados as resistencias de aquecimento e umidificacao (variaveis de controle).
• Obtencao de modelos lineares e nao-lineares que realizem o mapeamento do sinal da
temperatura e umidade da saıda de ar da incubadora, com os sinais de temperatura
e umidade nas posicoes definidas pela norma.
O problema do mapeamento das temperaturas, surge pelo fato de o sistema de
controle da incubadora utilizar o sensor localizado no alto da cupula para controlar os

35
nıveis de temperatura e umidade no interior desta, enquanto que a norma avalia os sinais
de temperatura e umidade medidos em pontos no interior da cupula (Secao 2.2). Como
as medidas da temperatura e umidade nestes pontos sao distintas, um modelo que realize
este mapeamento entre as grandezas medidas entre esses pontos contribui para que o
controlador atinja as condicoes determinadas pela norma.
2.5 Conclusoes
Neste capıtulo foi mostrado um descricao da incubadora utilizada, os sistemas
desenvolvidos e os criterios da norma utilizados para avaliar o controlador proposto. Para
o projeto do controlador proposto neste trabalho e necessario a identificacao do modelo
do processo a ser controlado, bem como a identificacao de modelos que solucionem o
problema do mapeamento descrito na Secao 2.4. A fundamentacao teorica dos modelos
utilizados nesta dissertacao sao discutidos nos Capıtulo 3 e 4.

36
3 ESTRUTURAS DE MODELOS LINEARES PARA IDENTIFICACAODE PROCESSOS
Uma incubadora neonatal, do ponto de vista da teoria do controle, pode ser des-
crita como um processo com duas variaveis de entrada e duas variaveis de saıda, onde as
variaveis controladas sao a temperatura e a umidade no ambiente interno destinado ao
recem nascido. A modelagem fenomenologica do processo de temperatura e umidade da
incubadora neonatal e uma tarefa complexa e com inumeros parametros, uma abordagem
deste tipo de modelagem pode ser vista em Al-Taweel (2006). Analisando o comporta-
mento da temperatura no interior da incubadora podemos destacar os seguintes fenomenos
que contribuem com o calor no interior desta: (i) troca de calor por conveccao com o ar
externo, (ii) troca de calor por irradiacao com o ar externo, (iii) troca de calor por convec-
cao com o ar interno, (iv) troca de calor por irradiacao entre as paredes da incubadora, e
(v) troca de calor por conducao pelas superficies opacas da incubadora.
A partir destes criterios podemos formular o seguinte modelo (ZERMANI; FEKI;
MAMI, 2011b):
(ρc)arvardTres
dt=
∑
r
HglobalSi(Tinterna−Tresultante)+n(ρc)arvar(Text−Tresultante+Qvent+P (t))
(3.1)
Sendo:
ρ Densidade do ar em kg ·m−3;
c Calor especıfico em m3 · kg−1;
v Volume em m3;
Hglobal Trocas por conveccao e irradiacao em W ·m−2 ·K−1;
Si Area da superfıcie de contato em m2;
Tinterna Temperatura do ar proximo as paredes em K;
Tresultante Temperatura em um ponto especıfico em K;
n Vazao do ar em m3 · s−1;
Text Temperatura do ar fora da incubadora em K;
37
Qvent Vazao do ar quente em m3 · s−1;
P (t) Potencia aplicada ao resistor de aquecimento em Watts;
Como mostrado na Equacao 3.1, o modelo fısico somente da temperatura interna
da Incubadora ja e complexo e alguns de seus parametros como a troca de calor entre
diferentes materiais dentro e fora da incubadora tornam seu uso difıcil na area da identifi-
cacao e controle e a aplicabilidade destes modelos baseado na modelagem fenomenologica
no projeto de controladores e questionado em Zermani, Feki e Mami (2011b).
Um modelo simplificado baseado na modelagem fısica e mostrado em Cavalcante
(2011). Neste modelo, a malha de temperatura consiste em um funcao de primeira ordem
no domınio da frequencia dada por:
θ(s) =λ
RCs+ 1e−L1sU(s). (3.2)
Sendo, θ(s) representa a transformada de Laplace da temperatura no interior da
cupula, λ o ganho do processo, R e a resistencia termica entre a temperatura de entrada
do ar e a temperatura de saıda do ar, e C e a capacidade termica do ambiente interno.
L1 descreve o atraso de transporte que foi inserido no modelo para representar o atraso
na propagacao do calor pelo ar da resistencia termica ate a parte superior da incubadora.
U(s) e a tensao de entrada no resistor de aquecimento.
Ja a malha de umidade e modelada pela seguinte equacao:
M(s)
Υi(s)=
κ
τs + 1e−L2s. (3.3)
Sendo, Υi(s) e a vazao de entrada, M(s) a transformada de Laplace da variacao
da massa de vapor d’agua no interior da incubadora, κ e uma constante de ganho, τ e
constante de tempo do modelo da umidade. L2 trata-se do atraso de transporte, e foi
inserido no mesmo sentido do atraso da malha de temperatura.
O autor tambem considerou a interacao entre as malhas de temperatura e umidade
representando estas interacoes por funcoes de transferencias de 1o ordem com atraso.
Assim um modelo geral multivariavel representando a dinamica dos sinais de temperatura
e umidade e mostrado a seguir (CAVALCANTE, 2011):

38
[λ
RCs+1e−L1s κ12
τ12s+1e−L12s
κ21
τ21s+1e−L21s κ
τs+1e−L2s
](3.4)
Dado a complexidade de se obter um modelo matematico baseado nas leis fısicas,
nesta dissertacao optou-se por utilizar os modelos propostos por Cavalcante (2011) em
conjunto com tecnicas de identificacao “caixa-preta”, cujo principio se baseia em obter
modelos matematicos de processos sem conhecimento previo do mesmo baseando apenas
nos sinais de entrada e saıda do processo.
A identificacao de sistemas consiste em maneiras de desenvolver e implementar
modelos matematicos que representem caracterısticas de sistemas reais. O modelo consiste
de: (i)uma equacao matematica, (ii) um sistema de equacoes ou (iii) uma heurıstica que
apresente uma relacao de causa e efeito similar a verificada no sistema real em estudo.
Quando a tecnica de identificacao nao utiliza nenhum conhecimento a priori da natureza
do sistema, baseando-se apenas em entradas e saıdas do sistema, e dito tratar-se de uma
modelagem caixa preta ou modelagem empırica (AGUIRRE, 2007). O uso de modelos e
conveniente quando se pretende estudar o comportamento do sistema sobre condicoes que
podem resultar em uma operacao arriscada para o sistema. O modelo e uma alternativa
de baixo custo para facilitar o projeto de controladores, uma vez que este e capaz de
simular o sistema.
O uso de modelagem caixa preta, e adequado quando a modelagem fısica do pro-
cesso se torna deveras complexa, com um alto numero de equacoes e parametros a serem
determinados. O modelo do processo da incubadora neonatal, como visto anteriormente,
e muito complexo de se obter utilizando as equacoes fısicas que descrevem as relacoes da
temperatura e umidade no interior da incubadora. Por essa razao neste trabalho optou-se
por obter um modelo para incubadora por meio de modelagem caixa preta utilizando-se
dos dados de entrada impostos aos atuadores e os dados de saıda medidos dos sensores de
temperatura e umidade, obtidos atraves de varios ensaios que serao descritos no capıtulo
6.
Entre os modelos lineares mais utilizados para a representacao de processos, po-
demos destacar os modelos ARX(autoregressive with exogenous inputs) e ARMAX(Auto
Regressive Moving Average with eXogenous inputs) (LJUNG, 1987) (ASTROM; BOHLIN,
1965). Estes modelos sao amplamente difundidos na literatura e usados na industria de-
vido a simplicidade de desenvolvimento dos mesmos. Ao adotar estes modelos considera-se
que grande parte dos sistemas podem ter um comportamento linear em torno de um ponto

39
de operacao. Outro tipo de modelo bastante utilizado, principalmente em controladores
MPC(Model Predictive Control), e o modelo FIR (Finite Impulse Response), dado que
entre as vantagens deste modelo esta em poder representar complexos sistemas dinamicos
e nao necessita da escolha de um estrutura (NIKOLAOU; VUTHANDAM, 1998) (LJUNG,
1987).
Dentre esses modelos, temos que o modelo FIR foi escolhido para realizar nosso
objetivo de mapeamento de sinais. No mapeamento, busca-se estimar os valores dos sen-
sores de temperatura e umidade nas posicoes previstas pela norma a partir da medida do
sensor de temperatura posicionado na saıda de ar da incubadora, assim durante a ope-
racao normal da incubadora somente o sensor da saıda de ar da incubadora e acessıvel.
Visto que so se dispoe da variavel de entrada, e nao se tem a disposicao os valores regressos
da saıda, o uso do modelo FIR e adequado para esta situacao. Como dito anteriormente,
o modelo proposto em Cavalcante (2011) sao utilizados nesta dissertacao para gerar o
modelo da dinamica entre temperatura e umidade da incubadora e os sinais aplicados aos
atuadores de calor (resistencia de aquecimento) e umidade (resistencia de vaporizacao).
A discretizacao deste modelo resulta em uma estrutura ARMAX. O modelo ARMAX foi
escolhido por sua simplicidade e vasta utilizacao na literatura na modelagem de processos
(AGUIRRE, 2007) alem de ser utilizado como parte do controlador proposto neste traba-
lho. Neste capıtulo a fundamentacao teorica dos modelos ARMAX e FIR utilizados no
desenvolvimento deste trabalho e apresentada conforme a organizacao descrita a seguir.
A Secao 3.1 aborda as representacoes em tempo discreto e formula o modelo geral de onde
derivam os modelos utilizados. A Secao 3.2 fala sobre o modelo FIR, enquanto a Secao 3.3
descreve o modelo ARMAX. A Secao 3.4 descreve o metodo dos mınimos quadrados para
a estimacao de parametros dos modelos e ,por fim, a Secao 3.5 apresenta as conclusoes do
capıtulo.
3.1 Representacoes em tempo discreto para sistemas lineares.
Sistemas lineares podem ser representados em funcao de suas entradas e saıdas
por meio de um funcao de transferencia discreta (OGATA, 1998).Um modelo linear SISO
(Single Input, Single Output) pode ser descrito por:
Y (z) = G(z)U(z) + V (z). (3.5)
Sendo, G(z) e denominado como a funcao de transferencia do sistema, U(z) e a
transformada Z da entrada u(t) e Y (z) e a transformada Z referente ao sinal de saıda do
sistema y(t). Finalmente V (z) corresponde ao efeitos das pertubacoes externas v(t). A
funcao de transferencia G(z) pode ser representada por uma razao de dois polinomios em

40
z como visto em 3.6,
G(z) =B(z)
A(z)=
Y (z)
U(z). (3.6)
A pertubacao v(t) , no projeto de controladores, e muitas vezes considerada de
natureza estocastica, sendo agregada ao processo e modelada a partir de um sinal e(t) com
media nula e variancia σ2e , denominada na literatura como ruıdo branco ou Guaussiano
(COELHO; COELHO, 2004). Um modelo geral para sistemas lineares que serve de base para
varias estruturas e mostrado em 3.7:
A(z)Y (z) =B(z)
A(z)U(z) +
C(z)
D(z)V (z) (3.7)
O ruıdo branco e representado por v(k) e A(z), B(z), C(z), D(z) e F (z) como os
polinomios mostrados em 3.8 ate 3.12.
A(z) = 1− a1z−1 − ...− any
z−ny ; (3.8)
B(z) = b1z−1 + ...+ bnu
z−nu ; (3.9)
C(z) = 1 + c1z−1 + ...+ cnv
z−nv ; (3.10)
D(z) = 1 + d1z−1 + ... + dnd
z−nd; (3.11)
F (z) = 1 + f1z−1 + ...+ fnf
z−nf . (3.12)
3.2 Modelo da resposta finita ao impulso - FIR
A Equacao (3.13) mostra que o somatorio de convolucao entre um sinal de entrada
u(k) e a resposta ao impulso de um sistema, h(k), resulta na saıda do sistema acrescido
do ruıdo e(k) (AGUIRRE, 2007):
y(k) =
∞∑
j=0
h(j)u(k − j) + e(k). (3.13)
O modelo descrito pela equacao 3.13 e denominado como resposta infinita ao
impulso (IIR do ingles infinite impulse response). Se a funcao de transferencia discreta
do processo H(z) for assintoticamente estavel, entao existe M < ∞ de forma que h(k) =
0, ∀K > M .O modelo FIR resulta, portanto, do truncamento da equacao( 3.13) mostrado
em:
y(k) =
M∑
j=0
h(j)u(k − j) + e(k). (3.14)

41
No modelo FIR discreto a saıda do sistema e dada pela soma ponderada do valor
corrente e finitos valores anteriores do sinal de entrada. Os modelos FIR (Finite Impulse
Response) sao de natureza nao recursiva, assim sistemas cujo modelos sao FIR tem funcoes
de transferencias polinomiais. O modelo FIR , pode ser obtido a partir da equacao 3.7,
fazendo C(z) = D(z) = F (z) = A(z) = 1 e B(z) um polinomio arbitrario de ordem M ,
ou seja, nu = M como visto em 3.15 (AGUIRRE, 2007):
Y (z) = B(z)U(z) + V (z). (3.15)
Convem notar que a saıda Y (z) e acrescido o ruıdo E(z). Nesse caso o ruıdo e
considerado branco, com base no fato de C(z)D(z)
= 1 ocasionando em E(z) = V (z) (AGUIRRE,
2007).
3.3 Modelo ARMAX
A partir do modelo geral descrito em 3.7, fazendo-seD(z) = F (z) = 1 e A(z),B(z)
e C(z) polinomios arbitrarios, tem-se o modelo auto-regressivo com media movel e entra-
das exogenas (ARMAX - autoregressive moving average with exogenous inputs), o modelo
ARMAX e descrito em 3.16
Y (z) =B(z)
A(z)U(z) +
C(z)
A(z)V (z) (3.16)
O modelo ARMAX o sinal de saıda y(k) e formado: (i) pela media ponderada dos
valores passados de y(k), (ii) pela media ponderada do valor atual e dos valores passados
do sinal de entrada u(k), e (iii) pela media ponderada do sinal de ruıdo e(k). O modelo
descrito em uma equacao a diferencas pode ser visto em 3.17:
y(k) = −a1y(k − 1)− . . .− anay(k − na) + b1u(k − 1) + . . .+ bnu
u(k − nu) + . . .
+e(k) + c1e(k − 1) + . . .+ cnce(k − nc).
(3.17)
3.4 O estimador dos mınimos quadrados
Dado que a aproximacao de modelos do tipo ARX e ARMAX em relacao ao
processo estudado e fortemente dependente dos parametros escolhidos, metodos para a
estimacao destes parametros sao desejaveis. Para a estimacao de parametros e necessario
a escolha de um modelo, um conjunto de dados de entrada e saıda do processo e um
metodo de identificacao. Dentre os metodos de estimacao de parametros mais difundi-
dos na literatura de controle moderno esta o metodo dos mınimos quadrados recursivos
(AGUIRRE, 2007). A ideia base para o desenvolvimento deste algoritmo foi introduzido

42
por Gauss, e desenvolvida na area de estudos da estatıstica antes de ser utilizada pela
area de identificacao de sistemas.
Considere um sistema discreto mostrado por:
y(k) = ϕT (k)θ + ξ(k). (3.18)
Onde,
y(k) e saıda do sistema,
ϕ(k) e chamado vetor de regressores, onde ϕ = [y(k − 1); y(k − 2); . . . ; y(k − ny)],
θ sao os parametros a serem estimados,
ξ(k), considerado como incertezas ou erros do modelo.
O metodos dos mınimos quadrados,a partir de N experimentos do processo, pro-
duz os parametros desejados avaliando o valor do erro do modelo, assim esse metodo tenta
alcancar o modelo com o menor erro possıvel. Para estimar esse erro o metodo se utiliza
de uma funcao de custo denotada por:
J =
N∑
i=0
ξ(i)2. (3.19)
Da equacao (3.18)temos que ξk = yk − ϕTk θ entao substituindo em (3.19)
J =
N∑
i=0
[yi − ϕTi θ]
2. (3.20)
A equacao (3.18) pode ser reescrita em sua forma matricial como em:
Y = ΦT Θ. (3.21)
E assim a equacao (3.20) pode ser reescrita como:
J = (Y − ΦT Θ)(Y − ΦT Θ)T . (3.22)
Expandindo a equacao (3.22) temos:
J = Y TY − Y TΦΘ− ΘTΦTY + ΘTΦTΦΘ. (3.23)

43
Como e esperado alcancar parametros que minimizem a funcao custo J , deve-se
derivar J em relacao a Θ e igualar a expressao resultante a zero:
∂J
∂Θ= −(Y TΦ)T − ΦTY + (ΦTΦ + ΦTΦ)Θ =
−ΦTY − ΦTY + 2ΦTΦΘ =
−2ΦTY + 2ΦTΦΘ = 0.
(3.24)
Da equacao (3.24) temos :
Θ = (ΦTΦ)−1ΦTY. (3.25)
Apos a estimacao dos parametros, podemos enfim realizar a validacao do modelo
produzido, comparando-o com o processo estudado, a fim de verificar se o modelo reproduz
as caracterısticas pertinentes do processo.
3.5 Conclusoes
Neste Capıtulo foram apresentados dois modelos lineares usados em identificacao
de processos, o modelo ARMAX e o modelo FIR, que sao os dois modelos utilizados no
objeto desta dissertacao, tambem foi abordado o metodo dos mınimos quadrados como
um procedimento para a estimacao de parametros dos modelos apresentados. No proximo
capıtulo sera introduzido a fundamentacao teorica dos modelos nao lineares utilizados
neste trabalho.

44
4 ESTRUTURAS DE MODELOS NAO-LINEARES PARAIDENTIFICACA DE PROCESSOS
Os processos dinamicos encontrados na maioria das aplicacoes praticas sao nao-
lineares, entretanto a grande maioria dos processos pode ser representada por modelos
lineares de modo satisfatorio. Porem representacoes lineares nao tem um desempenho
adequado para algumas aplicacoes, tornando o uso de modelos nao lineares uma alterna-
tiva a ser perseguida. A modelagem de processos atraves de modelos nao-lineares e uma
tarefa bem mais complexa quando comparada ao caso linear (AGUIRRE, 2007). Dentre as
razoes que encorajam o uso de modelos nao-lineares estao: (i) o fato destes conseguirem
reproduzir dinamicas dos processos que modelos lineares nao sao capazes de identificar,
e (ii) o avanco das ferramentas computacionais. O uso destas ferramentas torna o desen-
volvimento de modelos nao-lineares uma tarefa menos complexa, assim motivando o seu
uso crescente na literatura atual (AGUIRRE, 2007) (COELHO; COELHO, 2004).
No caso do processo da incubadora neonatal temos o mapeamento entre a tempe-
ratura na saıda de ar e a temperatura nos pontos definidos pela norma, estas temperaturas
se relacionam por uma dinamica nao-linear. Essa caracterıstica torna complexa a obten-
cao de modelos lineares que representem com fidelidade este mapeamento. Neste trabalho,
resolveu-se estimar modelos nao-lineares para este mapeamento buscando melhorar o de-
sempenho dos modelos lineares discutidos no capıtulo 3.
Neste capıtulo sera apresentada a base teorica dos modelos de identificacao nao
lineares utilizadas no desenvolvimento desta dissertacao. Na secao 4.2 sao apresentados os
modelos NARX (NonLinear Auto Regressive with eXogenous inputs) e NARMAX (Non-
Linear Auto Regressive Model with Moving Average and eXogenous inputs) que ja sao
amplamente difundidos na literatura. Na secao seguinte sao discutidos os modelos nao-
lineares baseados em redes neurais, e por fim na secao 4.3 temos as conclusoes finais do
capıtulo.
4.1 Modelo Polinomial NARMAX
O modelo NARMAX foi proposto em Leontaritis e Billings (1985) e Chen e Bil-
lings (1989), e desde de sua apresentacao, este modelo ja foi aplicado com sucesso na
identificacao de processos reais (AGUIRRE, 2007) (CORREA, 2001) e varias tecnicas de
estimacao de parametros e selecao de estrutura ja foram apresentadas na literatura. Ape-
sar do metodo de identificacao atraves de modelos NARMAX ter experimentado grande
desenvolvimento, o uso de controladores baseados nesta representacao ainda e pequeno

45
(COELHO; AGUIRRE; CORREA, 2002).
O modelo NARMAX e um metodo baseado em equacoes a diferencas que tenta
descrever o valor da saıda y(k) em funcao dos valores passados da entrada e saıda de um
processo nao-linear. O modelo NARMAX monovariavel com atraso puro de tempo τd, e
tempo de amostragem normalizado e mostrado a seguir:
y(k) = F ℓ
[y(k − 1), . . . , y(k − ny), u(k − τd), . . . , u(k − τd − nu),
e(k − 1), . . . , e(k − ne)
]+ e(k) (4.1)
Sendo que: y(k) representa o sinal de saıda, u(k) representa o sinal de entrada
e e(k) representa os efeitos que nao podem ser representados por F ℓ[.] que e uma funcao
nao-linear dependente de y(k),u(k) e e(k), sendo ny,nu e ne sao seus respectivos atrasos
maximos. A funcao F [.] normalmente nao e conhecida a priori, e sua escolha deve ser
tomada no sentido de ter a melhor representacao da relacao entrada e saıda dos dados.
Neste trabalho esta funcao e escolhida como uma funcao polinomial com grau de nao-
linearidade ℓ (AGUIRRE, 2007).
Pode-se expandir a equacao 4.1 em um somatorio de termos com nao linearidades
variando na faixa de 1 < m < ℓ, com cada termo de grau m podendo conter um fator de
grau p do tipo y(k − i) e um fator de grau (m − p) do tipo u(k − i) sendo multiplicado
por um parametro representado por θp,m−p(n1, . . . , nm). Assim tem-se:
y(k) =ℓ∑
m=0
m∑
p=0
ny,nu∑
n1,nm
θp,m−p(n1, . . . , nm)
p∏
i=1
y(k − ni)m∏
i=p+1
u(k − ni), (4.2)
sendo que:
ny,nu∑
n1,nm
≡
ny∑
n1=1
. . .
nu∑
nm=1
. (4.3)
A equacao (4.2) pode ser reescrita como:
y(k) = θ0
n∑
i1=1
θi1xi1(k)+n∑
i1=1
n∑
i2=i1
θi1i2xi1(k)xi2(k)+. . .+n∑
i1=1
. . .
n∑
iℓ=iℓ−1
θi1...iℓxi1(k) . . . xiℓ+e(k)
(4.4)

46
Onde:
x1(k) = y(k − 1), x2 = y(k − 2), . . . , xny+1(k) = u(k − τd), . . . ,
xny + nu + 1 = e(t− 1), . . . , xn = e(k − ne).
n = ny + nu + ne
Os parametros θ devem ser estimados para ajustar a estrutura do modelo aos
dados colhidos do processo. Como os polinomios nao-lineares sao funcoes lineares nos
parametros (CHEN; BILLINGS, 1989), permitindo assim o uso de algoritmos de estimacao
de parametros para modelos lineares como o metodo dos mınimos quadrados.
Os modelos NARX (Non-linear AutoRegressive with eXogenous inputs) podem
ser vistos como um caso particular do modelo NARMAX, onde este so contem a parte
determinıstica como mostrado a seguir:
y(k) = F ℓ[y(k − 1), . . . , y(k − ny), u(k − τd), . . . , u(k − τd − nu)
]+ e(k) (4.5)
Convem observar que a extensao dos modelos NARX e NARMAX para o caso
MISO(Multiple Input Single Output) nao corresponde a mudancas na equacao (4.1) e na
equacao (4.5) a nao ser a utilizacao da notacao vetorial para a representacao das entradas
externas como mostrado a seguir:
y(k) = F ℓ
[y(k − 1), . . . , y(k − ny),u(k − τd), . . . ,u(k − τd − nu),
e(k − 1), . . . , e(k − ne)
]+ e(k) (4.6)
y(k) = F ℓ[y(k − 1), . . . , y(k − ny),u(k − τd), . . . ,u(k − τd − nu),
]+ e(k) (4.7)
Pode-se representar a equacao (4.1) em forma matricial como em:
Y = PΘ+ ξ (4.8)
Sendo P e o vetor de regressores, Θ sao os parametros desconhecidos do modelo
que se deseja estimar e ξ sao os resıduos do modelo. Ao se observar o modelo NARMAX
polinomial da equacao(4.4), pode-se ver que as nao linearidades do modelo sao formadas
pelos produtos entre os regressores da entrada, da saıda ou entre ambos, um simples
incremento no grau de nao linearidade ℓ ou nos atrasos dos regressores ny,nu pode fazer
o numero de termos produto aumentar consideravelmente. Assim, para a construcao

47
de um bom modelo e necessario escolher quais destes produtos deve estar presente na
estrutura do modelo. Dentre os metodos de selecao de estrutura, pode-se destacar o
metodo EER(Error reduced ratio) (BILLINGS; CHEN; KORENBERG, 1989). O EER e um
criterio que associa um ındice a cada termo possıvel da estrutura do modelo mostrando
sua influencia no sinal de saıda, de posse destes ındices podemos ordenar os termos em
funcao de sua influencia e retirar termos ,cujo influencia pode ser desprezada, da estrutura
do modelo.
4.2 Redes Neurais Artificiais
O estudo de redes neurais artificiais data da decada de 40, quando foram apre-
sentados os primeiros termos de neuro computacao em artigos de McCulloch e Pitts.
Dentre as vantagens do uso de redes neurais podemos destacar a sua natureza nao-linear
que e uma propriedade muito importante quando se esta trabalhando com sinais de na-
tureza nao-linear. E segundo, o mapeamento entre entrada e saıda gerado atraves do
paradigma de aprendizagem, torna este metodo atrativo para a identificacao de sistemas
caixa preta, ou seja, sem que se necessite ter um conhecimento previo do processo que
se deseja modelar. Outras caracterısticas como : adaptabilidade, resposta a evidencias,
informacao contextual, tolerancia a falhas, uniformidade de analise e projeto e analogia
neuro-biologica fazem o estudo da aplicacao das redes neurais atingirem uma ampla faixa
de aplicacoes (HAYKIN, 2008) (AGUIRRE, 2007).
As redes neurais procuram solucionar problemas atraves de um modelo compu-
tacional baseado no funcionamento da estrutura neural de seres inteligentes, tendo como
sua unidade base de processamento, o neuronio artificial. Para o processo da incubadora
neonatal que apresenta algumas caracterısticas nao-lineares, e com modelo fısico bastante
complexo, a capacidade de mapeamento entre um conjunto de entradas e saıdas das re-
des neurais torna-se um fator motivador para seu uso na obtencao de um modelo do
processo da incubadora neonatal, assim procurou-se utilizar uma topologia de redes neu-
rais denominada rede MLP (Multilayer Perceptron) que ja esta bastante fundamentada
na literatura e com varios trabalhos apresentados area de identificacao de sistemas. A
rede neural MLP (Multilayer Perceptron)e uma rede nao recorrente, como aprendizado
supervisionado, muito utilizada a longas datas, devido ao seu sucesso como aproximador
universal de funcoes (HORNIK; STINCHCOMBE; WHITE, 1989) (HAYKIN, 2008).
A rede MLP e formada pela camada de entrada, uma ou mais camadas ocultas
e uma camada de saıda, onde a funcao de ativacao mais usada e a funcao sigmoidal. A
propagacao dos sinais e feita da camada de entrada em direcao a camada de saıda, as
camadas sao ligadas entre si atraves das ligacoes entre os neuronios. A conexao entre dois

48
neuronios i e j e ponderada por um peso wij. Os pesos devem ser ajustados de forma
a minimizar o erro entre o valor a ser estimado e a saıda da rede MLP. Um algoritmo
bastante utilizado para o ajuste de pesos em redes MLP e denominado backpropagation.
O algoritmo backpropagation pode ser dividido em duas etapas: (i) etapa de
propagacao de sinais para frente, e (ii) etapa de realimentacao. Na 1o etapa os padroes
de entrada sao apresentados a rede sem alteracao nos pesos das conexoes. Os sinais
sao calculados individualmente em cada neuronio, seguindo de camada em camada ate
produzir o resultado na camada de saıda. Este resultado e comparado com a saıda desejada
e o erro e calculado. Na segunda etapa de realimentacao, o erro calculado na saıda e
propagado de camada em camada em direcao a entrada da rede, atualizando os pesos das
conexoes dos neuronios a medida que o erro e propagado pelas camadas. Exemplos de
padroes de entrada sao apresentados a rede ate que seja alcancado um criterio de parada.
Tres criterios mais usados sao (HAYKIN, 2008):
• A norma do vetor gradiente da superfıcie do erro em relacao ao vetor de pesos tenha
um valor suficientemente pequeno;
• Um valor mınimo para o erro medio quadratico seja alcancado, com esse criterio
nao existe garantia que o algoritmo chegara a este valor;
• O numero maximo de iteracoes do Algoritmos tenha sido alcancado;
O algoritmo backpropagation pode ser descrito com os seguintes passos:
1. Inicializar os pesos com valores pequenos e aleatorios;
2. Escolher aleatoriamente um padrao de entrada;
3. Propagar o sinal atraves da rede;
4. Calcular δli na camada de saıda conforme a equacao 4.9:
δli = g′(hli) · [d
ui − yli], (4.9)
sendo que hli representa a entrada do i-esimo neuronio na l-esima camada, g′(·) e a
derivada da funcao de ativacao, dui e a saıda desejada do i-esimo neuronio e yli e a
saıda do i-esimo neuronio
5. Calcule os deltas das camadas anteriores, propagando o erro na direcao da camada
de entrada, como mostrado na equacao (4.10):

49
δli = g′(hli) ·
m∑
j=0
wl+1ij · δl+1
i , (4.10)
Sendo m o numero de ligacoes do neuronio i da camada l com os neuronios da
camada l + 1.
6. Atualize o valor dos pesos de acordo com a equacao 4.11:
∆w = α · δli · yli (4.11)
7. Retorne ao passo 2 e repita para outro padrao de entrada ate que o erro na camada de
saıda fique abaixo de um patamar especificado ou um numero maximo de interacoes
seja atingido.
4.3 Conclusoes
Neste capıtulo foram abordadas as tecnicas nao lineares utilizadas para cumprir
o objetivos desta dissertacao. Como modelos nao lineares mais tradicionais como NARX
e NARMAX e abordagens mais recentes como as redes neurais artificiais com a topologia
MLP. Neste e no capıtulo 3 mostrou-se tecnicas de natureza linear e nao-linear utilizadas
para se obter modelos que representassem os sinais de temperatura e umidade da incu-
badora neonatal. Estes modelos sao utilizados no projeto do controlador para o processo
da incubadora neonatal, onde o processo e representado pelo modelo linear ARMAX, e
os outros modelos estudados sao usados no mapeamento da temperatura e umidade, que
tem por objetivo melhorar o desempenho do controlador em relacao a norma. O proximo
capıtulo aborda a fundamentacao teorica para o projeto do controlador, que e objeto desta
dissertacao.

50
5 CONTROLE PREDITIVO BASEADO EM MODELO
Este capıtulo apresenta uma introducao teorica ao controle preditivo baseado em
modelo, enfatizando a tecnica GPC (Generalized Preditive Control) utilizada no desen-
volvimento deste trabalho.
5.1 Introducao
O controle preditivo baseado em modelo (CPBM) e um metodo relativamente
novo da engenharia de processos. Este metodo surgiu no fim da decada de 70, e desde
entao os estudos e a sua utilizacao na industria vem se expandindo. O CPBM abrange um
conjunto de tecnicas que utiliza explicitamente um modelo do processo, como forma de
obter um sinal de controle que minimize uma funcao de custo. O uso do termo preditivo se
deve ao fato de o CPBM deste utilizar a predicao dos valores futuros das variaveis contro-
ladas para escolher a sequencia de valores das variaveis de controle de forma que o processo
siga satisfatoriamente uma referencia dada. As previsoes das variaveis controladas sao fei-
tas atraves de um modelo do processo, de forma que a eficiencia do CPBM e fortemente
dependente da qualidade do modelo utilizado (CAMACHO; BORDONS, 1999)(HABER; BARS;
SCHMITZ, 2011).
Dentre as vantagens do uso do CPBM podemos citar (CAMACHO; BORDONS,
1999):
• Seus principais conceitos sao intuitivos e a sintonia e de facil execucao, tornando-se
atrativo para operadores com pouco conhecimento de controle.
• Pode ser usado para controlar uma ampla faixa de processos, mesmo processos
com longos atrasos de transportes, fase nao mınima e processos instaveis em malha
aberta.
• Consegue tratar o caso multivariavel.
• Compensacao intrınseca do tempo morto.
A principal desvantagem do uso de CPBM e o fato deste poder demandar um
grande esforco computacional para otimizar a funcao custo, geralmente tendo que solu-
cionar um problema de programacao linear ou quadratica a cada iteracao, quando sao
usadas restricoes. Este fato pode tornar proibitivo seu uso em sistemas que necessitam de
pequenos perıodos de amostragem, na ordem de microsegundos, por exemplo. Entretanto,

51
quando nao sao consideradas restricoes na otimizacao da funcao custo e modelos lineares
para a representacao do processo, a solucao otima pode ser encontrada analiticamente,
equiparando o esforco computacional ao mesmo para implementar um controlador PID
de dois graus de liberdade. O controlador desenvolvido nesta dissertacao seguiu a linha
descrita neste ultimo caso.
A estrutura geral de um processo controlado por CPBM pode ser visto na Figura
5.1.
Figura 5.1: Visao geral de controlador preditivo baseado em modelo.
Fonte: Adaptado de Camacho e Bordons (1999)
Os controladores do tipo CPBM se diferenciam principalmente na forma de cal-
cular a predicao e na otimizacao da funcao custo, entretanto os procedimentos seguintes
sao comuns a todos eles (CAMACHO; BORDONS, 1999):
1. As saıdas preditas sao calculadas no instante t da seguinte forma, y(t+ k|t), sendo:
k = 1...N , e N chamado de horizonte de predicao. As saıdas preditas dependem dos
valores das saıdas e entradas passadas ate o instante t e da futura acao de controle
dada por: u(t+ k|t), k = 0, ..., N − 1.
2. Os valores futuros da acao de controle sao calculados com base na otimizacao de
um criterio de forma que o processo fique o mais proximo possıvel da trajetoria de
referencia desejada, denotada por w(t+ k). Um criterio bastante comum e o uso de
uma funcao quadratica do erro entre a saıda predita e a referencia. Em outros casos
o esforco de controle tambem e incluıdo na funcao objetivo. Restricoes ao sinal de
controle e a saıda tambem podem ser incluıdas, sob a penalidade de ser necessario
usar um metodo de otimizacao iterativa para a funcao custo.
3. Somente o sinal de controle u(t|t) e aplicado ao processo sendo os demais descar-
tados. Isso se da porque no proximo passo de amostragem o sinal y(t + 1) ja e
conhecido e o procedimento e refeito ja incluindo este valor.

52
Como dito anteriormente, o CPBM engloba uma famılia de metodos de controle,
entre esses metodos um dos mais difundidos na literatura e utilizado na industria (CA-
MACHO; BORDONS, 1999) e o GPC (General Preditive Controller) (CLARKE; MOTHADI;
TUFFS, 1987). Este metodo utiliza um modelo de predicao baseado na resposta ao de-
grau, denominado CARIMA (Controlled Auto-Regressive Integrating Moving Average).
Sua descricao e detalhada a seguir.
5.2 GPC (Generalized Preditive Control)
O controlador GPC calcula uma sequencia de acoes de controle buscando minimi-
zar uma funcao de custo definida sobre um horizonte de predicao. O criterio de otimizacao
e funcao quadratica que depende do erro entre a saıda predita e a predicao da referencia
mais uma funcao quadratica que depende do esforco de controle.
Para a descricao do GPC vamos considerar um processo SISO que se pretende
controlar, descrito em um modelo CARIMA:
A(q−1)y(t) = q−dB(q−1)u(t− 1) + C(q−1)e(t)
∆(5.1)
Sendo, q o operador de deslocamento a frente, y(t) a saıda do processo, u(t)
a entrada aplicada e e(t) um ruıdo branco de media zero, todos referentes ao instante
discreto de tempo t. O termo d > 0 e utilizado para representar o atraso de transporte do
processo, se houver. Sendo ∆ = 1− q−1. O termo ∆ adiciona a caracterıstica integradora
ao controlador, conferindo-lha a caracterıstica de anular disturbios do tipo degrau. A(q−1),
B(q−1) e C(q−1) sao polinomios em q da forma:
A(q−1) = 1 + a1q−1 + ... + anaq
−na
B(q−1) = b0 + b1q−1 + ...+ bnbq
−nb
C(q−1) = 1 + c1q−1 + ...+ cncq
−nc
(5.2)
Este modelo e denominado CARIMA (Controller Auto-Regressive Integrating Mo-
ving Average) que pode ser descrito como a versao incremental do modelo CARMA.(Alguns
autores denominam o modelo ARMAX como CARMA). Para simplificar os calculos no
desenvolvimento do GPC faz-se o polinomio C igual a 1.

53
No algoritmo GPC a funcao de custo e denominada conforme Equacao (5.3):
J =
N2∑
j=N1
δ(j)[y(t + j|t)− w(t+ j)]2 +
Nu∑
j=1
λ(j)[∆u(t+ j − 1)]2, (5.3)
em que y(t+ j|t) e a saıda prevista do sistema j passos a frente com base nas informacoes
ate o instante t, w(t + j) a trajetoria de referencia no instante j. ∆u sao as variacoes
futuras do controle, δ(j) e λ(j) sao, respectivamente, as ponderacoes do sinal de erro e da
variacao do controle, usualmente δ(j) e considerado igual a 1 e λ(j) como uma constante.
N2 e N1 sao, respectivamente os horizontes de predicao, maximo e mınimo, da saıda. Nu e
o maximo horizonte de predicao do controle, e o algoritmo de otimizacao busca justamente
encontrar ∆u que minimize o erro entre a saıda predita e a referencia dentro do horizonte
de predicao determinados por N1 e N2. De posse da funcao custo, o algoritmo do GPC
pode ser dividido em duas etapas:
• Calculo da previsao da saıda de acordo com o horizonte de predicao;
• Calculo da lei de controle minimizando a funcao custo J .
Para minimizar a funcao custo dada em (5.3), temos que primeiramente calcular a predicao
da saıda y(t+ j) sobre o horizonte de predicao dado i = N1...N2. Uma das formas de se
calcular esta predicao e utilizando uma equacao Diophantine como a seguinte:
1 = Ej(q−1)A(q−1) + z−jFj(q
−1), (5.4)
sendo A(q−1) = ∆A(q−1). Os polinomios Ej e Fj sao definidos com graus j − 1
e na respectivamente. Uma forma de se obter estes polinomios, e realizando a divisao de
1 por A(q−1) ate o resto poder ser fatorado em funcao de z−jFj(q−1). O quociente da
divisao polinomial resultara em Ej(q−1). Multiplicando a equacao 5.1 por ∆Ej(q
−1)z−j
chegamos:
A(q−1)Ej(q−1)y(t+ j) = Ej(q
−1)B(q−1)∆u(t+ j − d− 1) + Ej(q−1)e(t+ j) (5.5)
De acordo com as Equacoes (5.1) (5.4) podemos escrever a saıda previsto no
instante j de acordo com:
y(t+ j|t) = Gj(q−1)∆u(t+ j − d− 1) + Fj(q
−1)y(t), (5.6)
sendo, Gj(q−1) = Ej(q
−1)B(q−1).
Observando que o grau do polinomio Ej tem grau j − 1 os termos do ruıdo da
Equacao (5.5) estarao todos no futuro, este termo e desaparece na Equacao (5.6), pois a

54
melhor previsao e aquela em que o efeito do ruıdo e nulo. A equacao Diophantine pode
ser resolvida recursivamente, um metodo para essa resolucao e mostrado em Camacho e
Bordons (1999).
Considere o seguinte conjunto de predicoes j passos a frente:
y(t+ d+ 1|t) = Gd+1∆u(t) + Fd+1y(t)
y(t+ d+ 2|t) = Gd+2∆u(t+ 1) + Fd+2y(t)...
y(t+ d+N |t) = Gd+N∆u(t+N − 1) + Fd+Ny(t)
Que pode ser reescrita da seguinte maneira:
y = Gu+ F(q−1)y(t) +G′∆u(t− 1) (5.7)
Sendo:
y =
y(t + d+ 1|t)
y(t + d+ 2|t)...
y(t+ d+N |t)
u =
∆u(t)
∆u(t+ 1)...
∆u(t+N − 1)
G =
g0 0 · · · 0
g1 0 · · · 0...
......
...
gN−1 gN−2 · · · g0
G′(q−1) =
(Gd+1(q−1)− g0)q
(Gd+2(q−1)− g0 − g1q
−1)q2
...
(Gd+N(q−1)− g0 − g1q
−1 − · · · − gN−1q−(N−1))qN
F(q−1) =
Fd+1
Fd+2
...
Fd+N (q−1)
Percebe-se que os dois ultimos termos da Equacao (5.7) dependem somente de
sinais passados, podendo ser agrupado em uma variavel denominada f , resultando em:
y = Gu+ f (5.8)

55
Supondo que as condicoes iniciais sejam nulas, a resposta livre (f) tambem e nula.
Se um sinal do tipo degrau unitario for aplicado a entrada no tempo t tem-se:
∆u(t) = 1,∆u(t+ 1) = 0, · · · ,∆u(t+N − 1) = 0
O sinal de saıda e dado pela sequencia [y(t + 1), y(t + 2), · · · , y(t + N)]T ] que e
igual a primeira coluna da matriz G. A primeira coluna da matriz G pode ser calculada
como a resposta do processo a um degrau unitario aplicada a variavel controlada. A
resposta livre do processo f pode ser calculada recursivamente atraves de:
fj+1 = q(1− A(q−1))fj +B(q−1)∆u(t− d+ j) (5.9)
Sendo: fj = y(t) e ∆u(t− d+ j) = 0 para j ≥ 0.
Assim podemos reescrever a Equacao (5.3) da seguinte forma:
J = (Gu+ f −w)T (Gu+ f −w) + λuTu) (5.10)
Sendo: w = [w(t+ d+ 1), w(t+ d+ 2), · · · , w(t+ d+N)]T
A Equacao (5.10) ainda pode ser reduzida a:
J =1
2uTHu+ bTu+ f0. (5.11)
Sendo: H = 2(GTG + λI) , bT = 2(f −w)TG e f0 = (f −w)T (f −w)
O valor mınimo de J, assumindo que nao existem restricoes nos sinais de entrada
e saıda, pode ser encontrada fazendo ∂u= 0 que resulta em:
u = −H−1b = (GTG+ λI)−1GT (w − f) (5.12)
Relembrando que somente o sinal de controle atual e efetivamente aplicado ao
processo, especificado pelo primeiro elemento do vetor de acoes de controle que pode ser
escrito como:
∆u(t) = K(w− f) (5.13)
Sendo K a primeira linha da matriz (GTG+ λI)−1GT . No caso sem restricoes, a
lei de controle pode ser resolvida analiticamente. A partir desta solucao e possıvel colocar
o controlador GPC na estrutura conhecida como RST muito utilizada na industria. Nesta
estrutura a lei de controle deve ser posta em funcao da saıda e da referencia. Assim
podemos reescrever a Equacao (5.12) da seguinte forma:

56
u = 2H−1GT (w− f) = Vw−VGTu−Vfy(t) (5.14)
Sendo V = 2H−1GT , como somente o elemento atual do vetor de controle e aplicado ao
processo, pode-se escrever a lei de controle na forma RST incremental da seguinte forma:
(1 + z−1V1GT (z−1))∆u = V1w(t+N2)−V1F(z
−1)y(t) (5.15)
Observando a metodologia exposta para o calculo da lei de controle, pode-se cons-
tatar que a utilizacao do GPC utilizando um modelo linear e sem considerar restricoes na
otimizacao de J, demanda esforco computacional equivalente a controladores tradicionais
do tipo PID, por exemplo. Pode ser visto tambem que com o conhecimento da referen-
cia futura o controlador pode reagir de forma antecipada. O controlador trata de forma
simples o atraso de transporte do processo controlado, atraves do horizonte de predicao
definido por N1 e N2. Pode-se fazer que N2 seja maior que o atraso de transporte e
suas eventuais variacoes, nao sendo demandando um conhecimento exato da duracao do
atraso. Outra forma seria adotar N1 > 1, de forma a reduzir o esforco computacional
desconsiderando-se previsoes que nao dependem, por causa do tempo morto, dos sinais de
controle a serem calculados. Em alguns casos o polinomio C(z−1) pode ser usado como
um pre-filtro da saıda. Uma maneira simples de incluir este polinomio no calculo da lei
de controle e fazer:
yf(t) =y(t)
C(z−1)(5.16)
e
uf(t) =u(t)
C(z−1)(5.17)
Assim a Equacao (5.1) pode ser reescrita da seguinte forma:
A(q−1)yf(t) = q−dB(q−1)uf(t− 1) +e(t)
∆, (5.18)
E a acao de controle pode ser calculada como ja demonstrado anteriormente neste capıtulo.
Quando utilizado como pre-filtro, segundo Camacho e Bordons (1999), um polinomio
C(z−1) com um grau superior ao polinomio A(z−1) e uma boa escolha inicial.

57
5.3 Conclusoes
Neste capıtulo foi mostrado o embasamento teorico, para o projeto do controlador
GPC. Um controlador deste tipo foi projetado para o processo da incubadora neonatal
objeto deste trabalho. Os ensaios realizados e os resultados obtidos pelo controlador sao
abordados no Capıtulo 6.

58
6 ENSAIOS E RESULTADOS EXPERIMENTAIS
Neste capıtulo e descrito como foi realizado o projeto do controlador preditivo
usado neste trabalho, que atua no processo da incubadora neonatal bem como a descricao
dos ensaios para a obtencao de modelos do processo. Resultados obtidos com o sistema
de avaliacao de desempenho desenvolvido neste trabalho sao mostrados e comentados em
duas situacoes: (i) ensaios com a Incubadora Comercial, e (ii) ensaios com a Incubadora
GPAR. Estas informacoes sao expostas em secoes no decorrer deste capıtulo na forma
descrita a seguir:
Secao 6.1 Nesta secao sao descritos os ensaios realizados e a obtencao dos modelos vistos
nos capıtulos 3 e 4 para o processo da Incubadora GPAR.
Secao 6.2 Nesta secao sao descritos os ensaios realizados para o projeto do controlador
visto no capıtulo 5 para o processo da Incubadora GPAR.
Secao 6.3 Nesta secao sao apresentados os resultados obtidos com o controlador proje-
tado.
Nesta dissertacao foram desenvolvidos modelos que representam a dinamica entre
a acao de controle dos atuadores e valor da temperatura e umidade e modelos que fizessem
o mapeamento entre a temperatura no ponto de saıda da incubadora, e as temperaturas
nos pontos determinados pela norma como definido no Capıtulo 1. Inicialmente procurou-
se estudar modelos que descrevessem o mapeamento entre as medidas de temperatura e
umidade na saıda e aquelas tomadas na posicao definida pela norma.
6.1 Modelos para Mapeamento
Tres modelos foram desenvolvidos com este fim: um modelo de regressao linear
(FIR), um modelo baseado em redes neurais, e um modelo nao linear do tipo NARX.
Para a estimacao/treinamento dos modelos de mapeamento utilizou-se os dados obtidos
durante um ensaio mostrado na Figura 6.1, e os modelos obtidos sao validados utilizando
os dados do ensaio mostrado na Figura 6.2.
Os dois ensaios foram realizados em dias distintos ambos sobre os pontos de
operacao de 32oC e 36oC e tiveram um duracao de 180 minutos e foi utilizado um tempo
de amostragem de 24 segundos para a aquisicao dos dados, totalizando 450 amostras por
grandeza medida no ensaio. As temperaturas de operacao e a duracao do ensaio forma

59
Figura 6.1: Dados do ensaio utilizados para treinamento dos modelos de mapeamento.
0 50 100 150 20026
28
30
32
34
36
38
40Ponto A
Tempo (min)
Tem
pera
tura
(°C
)
0 50 100 150 20026
28
30
32
34
36
38
40Ponto B
Tempo (min)
Tem
pera
tura
(°C
)
0 50 100 150 20026
28
30
32
34
36
38
40Ponto C
Tempo (min)
Tem
pera
tura
(°C
)
0 50 100 150 20026
28
30
32
34
36
38
40Ponto D
Tempo (min)
Tem
pera
tura
(°C
)
0 50 100 150 20026
28
30
32
34
36
38
40Ponto E
Tempo (min)
Tem
pera
tura
(°C
)
0 50 100 150 20040
45
50
55
60Ponto A
Tempo (min)
Um
idad
e R
elat
iva
(%)
0 50 100 150 20026
28
30
32
34
36Ponto Saída
Tempo (min)
Tem
pera
tura
(°C
)
0 50 100 150 20052
53
54
55
56
57
58Ponto Saída
Tempo (min)
Um
idad
e R
elat
iva
(%)
Fonte: Proprio Autor
Figura 6.2: Dados do ensaio utilizados para validacao dos modelos de mapeamento.
0 50 100 150 20024
26
28
30
32
34
36
38Sensor A
Tempo (min)
Tem
pera
tura
(°C
)
0 50 100 150 20024
26
28
30
32
34
36
38Sensor B
Tempo (min)
Tem
pera
tura
(°C
)
0 50 100 150 20026
28
30
32
34
36
38
40Sensor C
Tempo (min)
Tem
pera
tura
(°C
)
0 50 100 150 20026
28
30
32
34
36
38Sensor D
Tempo (min)
Tem
pera
tura
(°C
)
0 50 100 150 20026
28
30
32
34
36
38Sensor E
Tempo (min)
Tem
pera
tura
(°C
)
0 50 100 150 20044
46
48
50
52
54
56Sensor A
Tempo (min)
Um
idad
e R
elat
iva
(%)
0 50 100 150 20026
28
30
32
34
36Ponto Saída
Tempo (min)
Tem
pera
tura
(°C
)
0 50 100 150 20052
53
54
55
56
57
58Ponto Saída
Tempo (min)
Um
idad
e R
elat
iva
(%)
Fonte: Proprio Autor
escolhidos de forma a representar as condicoes exigidas pelos ensaios da norma enquanto
que para a escolha do perıodo de amostragem utilizou-se cerca de um decimo da constante
de tempo da malha de temperatura. Para avaliar o desempenho dos modelos foi utilizado
o erro medio quadratico (Eq.(6.1)), em que o valor da funcao foi calculado sobre o erro
entre os dados reais e a saıda do modelo identificado sobre todas as amostras do ensaio,
o que totaliza 450 pontos.
MSE = J =
N∑i=1
e(i)2
N=
N∑i=1
(y(i)− y(i))2
N(6.1)
Na Equacao 6.1, N e numero total de amostras e e(i) o erro entre a saıda real y(i) e a
saıda do modelo identificado y(i) na amostra i.

60
6.1.1 Modelo Regressivo
Neste modelo, a temperatura em cada um dos pontos (A-E) (ver Figura 2.12)e
uma combinacao linear dos valores passados da temperatura de saıda, semelhante ao mos-
trado no modelo FIR. A partir de testes variando-se o numero de regressores e verificando-
se o erro entre o modelo e os dados reais, foi escolhido o modelo com janela temporal de
comprimento 3. E estimado um modelo para cada relacao de temperatura, e um modelo
para a relacao da umidade. A estrutura do modelo e dada a seguir:
Tn(k) = a1Ts(k) + a2Ts(k − 1) + a3Ts(k − 2) (6.2)
UA(k) = a1Us(k) + a2Us(k − 1) + a3Us(k − 2) (6.3)
Sendo, Tn com n ∈ {A,B,C,D,E}, as temperaturas nos os pontos determinados pela
norma e Ts e Us a temperatura e umidade medida pelo sensor na cupula,respectivamente.
E a1, a2 e a3 sao os parametros de cada modelo que foram estimados atraves do metodo
dos mınimos quadrados utilizando os dados de treinamento mostrados na Figura 6.1. Os
coeficientes obtidos sao mostrados nas Equacoes (6.4) - (6.9) e a comparacao entre a saıda
do modelo regressivo identificado e os dados de treinamento e mostrada na Figura 6.3.
Θa = [−40, 7033 85, 2069 −43, 4199]T (6.4)
Θb = [−31, 86 61, 5550 −28, 6109]T (6.5)
Θc = [−59, 5360 122, 8083 −62, 1747]T (6.6)
Θd = [−39, 7215 75, 5679 −34, 7595]T (6.7)
Θe = [−34, 3537 69, 2311 −33, 7869]T (6.8)
Θua = [−4, 6778 −0, 0793 5, 6385]T (6.9)
Os modelos foram entao validados com os dados mostrados na Figura 6.2 e os resultados
sao mostrados na Figura 6.4. Como forma de avaliar os modelos, foi utilizado o erro medio
quadratico como ındice de desempenho. Os ındices obtidos na validacao sao mostrados
na Tabela 6.1:
Tabela 6.1: Resultados do ındice de desempenho do modelo Regressivo - ValidacaoTA TB TC TD TE UA
MSE 0,5971 0,6037 1,0292 0,5587 0,6101 4,0853

61
Figura 6.3: Resultado dos modelos regressivos com os dados de treinamento.
0 50 100 150 20026
28
30
32
34
36
38
40
Tempo (min)
Tem
pera
tura
(°C
)Ponto A
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40
Tempo (min)
Tem
pera
tura
(°C
)
Ponto B
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40
Tempo (min)
Tem
pera
tura
(°C
)
Ponto C
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40
Tempo (min)
Tem
pera
tura
(°C
)
Ponto D
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40
Tempo (min)
Tem
pera
tura
(°C
)
Ponto E
ModeloReal
0 50 100 150 20045
50
55
60
Tempo (min)
Um
idad
e R
elat
iva
(%)
Ponto A
ModeloReal
Fonte: Proprio Autor
Figura 6.4: Resultado dos modelos regressivos com os dados de validacao.
0 50 100 150 20024
26
28
30
32
34
36
38
Tempo (min)
Tem
pera
tura
(°C
)
Ponto A
ModeloReal
0 50 100 150 20024
26
28
30
32
34
36
38
Tempo (min)
Tem
pera
tura
(°C
)
Ponto B
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40
Tempo (min)
Tem
pera
tura
(°C
)
Ponto C
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
Tempo (min)
Tem
pera
tura
(°C
)
Ponto D
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
Tempo (min)
Tem
pera
tura
(°C
)
Ponto E
ModeloReal
0 50 100 150 20044
46
48
50
52
54
56
Tempo (min)
Um
idad
e R
elat
iva
(%)
Ponto A
ModeloReal
Fonte: Proprio Autor
Analisando os dados da validacao, o modelo regressivo apresentou um resultado
com erros absolutos maximos de ate 2oC no mapeamento da temperatura, e tambem com
erros maximos absolutos de 6% de umidade relativa do ar.

62
6.1.2 Modelo MLP
No mapeamento usando a rede neural MLP, foram estimados dois modelos: um
para temperatura e outro para umidade. No modelo da temperatura optou-se por usar
como entrada da rede, os 3 valores passados da temperatura da saıda como entrada da
rede e como saıda os valores atuais das cinco temperaturas nos pontos determinados pela
norma. O modelo da umidade seguiu raciocınio identico, tendo com entrada os 3 valores
passados da umidade de saıda, assim temos uma MLP 3-8-5 para a temperatura e uma
MLP 3-8-1 para a umidade. O numero de neuronios da camada oculta foi escolhido a partir
de experimentos, foram testados valores entre 1 e 16 neuronios. Foi escolhido o numero
de oito neuronios levando-se em conta o erro medio quadratico da saıda. Os neuronios
da camada intermediaria utilizam a tangente hiperbolica como funcao ativacao, enquanto
os neuronios da camada de saıda utilizam a funcao linear. Os resultados obtidos com os
dados de treinamento e validacao sao mostrados nas Figuras 6.5 e 6.6, respectivamente.
Os ındices de desempenho da validacao sao mostrados na Tabela 6.2:
Tabela 6.2: Resultados do ındice de desempenho do modelo MLP - ValidacaoTA TB TC TD TE UA
MSE 0,0440 0,0569 0,0614 0,0491 0,0429 20,9478
Figura 6.5: Resultado dos modelos com redes MLP com os dados de treinamento.
0 50 100 150 20026
28
30
32
34
36
38
40Ponto A
Tempo (min)
Tem
pera
tura
(°C
)
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40Ponto B
Tempo (min)
Tem
pera
tura
(°C
)
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40Ponto C
Tempo (min)
Tem
pera
tura
(°C
)
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40Ponto D
Tempo (min)
Tem
pera
tura
(°C
)
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40Ponto E
Tempo (min)
Tem
pera
tura
(°C
)
ModeloReal
0 50 100 150 20040
45
50
55
60Ponto A
Tempo (min)
Um
idad
e R
elat
iva
(%)
ModeloReal
Fonte: Proprio Autor

63
Figura 6.6: Resultado dos modelos com redes MLP com os dados de validacao.
0 50 100 150 20024
26
28
30
32
34
36
38Sensor A
Tempo (min)
Tem
pera
tura
(°C
)
ModeloReal
0 50 100 150 20024
26
28
30
32
34
36
38Sensor B
Tempo (min)
Tem
pera
tura
(°C
)
ModeloReal
0 50 100 150 20025
30
35
40Sensor C
Tempo (min)
Tem
pera
tura
(°C
)
ModeloReal
0 50 100 150 20024
26
28
30
32
34
36
38Sensor D
Tempo (min)
Tem
pera
tura
(°C
)
ModeloReal
0 50 100 150 20024
26
28
30
32
34
36
38Sensor E
Tempo (min)
Tem
pera
tura
(°C
)
ModeloReal
0 50 100 150 20035
40
45
50
55
60
65Sensor A
Tempo (min)
Um
idad
e R
elat
iva
(%)
ModeloReal
Fonte: Proprio Autor
Analisando os dados da validacao, o modelo com redes neurais apresentou um
resultado com erros absolutos maximos de ate 0, 5oC no mapeamento da temperatura, e
tambem com erros maximos absolutos de 12% de umidade relativa do ar.
6.1.3 Modelo NARX
Na utilizacao do modelo NARX, foram utilizados um modelo para cada relacao
de temperatura e umidade. Apos testes variado-se o numero de regressores, os escolhidos
para o modelo da temperatura foram o valor atual da saıda e o quadrado deste valor como
mostrado na Equacao (6.11), a escolha deste modelo se deu pela observacao do menor erro
entre o modelo e os dados de treinamento. Tambem foi considerado a simplicidade do
modelo uma vez que em trabalhos futuros pretende-se que o modelo seja computado em
um microcontrolador.
Tn(k) = a2Ts(k − 1)2 + a1Ts(k − 1) + a0 (6.10)
UA(k) = a2Us(k − 1)2 + a1Us(k − 1) + a0 (6.11)
Onde Tn com n ∈ {A,B,C,D,E}, sao as temperaturas nos pontos determinados pela
norma e Ts e Us a temperatura e umidade medidas pelo sensor na cupula, respectivamente.
Por fim a0, a1 e a2 sao os parametros do modelo, que foram estimados atraves do metodo
dos mınimos quadrados. Os coeficientes encontrados sao mostrados nas Equacoes (6.12)
- (6.17). Os resultados obtidos com os dados de treinamento e validacao sao mostrados
nas Figuras 6.7 e 6.8, respectivamente.

64
Figura 6.7: Resultado dos modelos NARX com os dados de treinamento.
0 50 100 150 20026
28
30
32
34
36
38
40
Tempo (min)
Tem
pera
tura
(°C
)Ponto A
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40
Tempo (min)
Tem
pera
tura
(°C
)
Ponto B
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40
Tempo (min)
Tem
pera
tura
(°C
)
Ponto C
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40
Tempo (min)
Tem
pera
tura
(°C
)
Ponto D
ModeloReal
0 50 100 150 20026
28
30
32
34
36
38
40
Tempo (min)
Tem
pera
tura
(°C
)
Ponto E
ModeloReal
0 50 100 150 20045
50
55
60
Tempo (min)
Um
idad
e R
elat
iva
(%)
Ponto A
ModeloReal
Fonte: Proprio Autor
Figura 6.8: Resultado dos modelos NARX com os dados de validacao.
0 50 100 150 20024
26
28
30
32
34
36
38
Tempo (min)
Tem
pera
tura
(°C
)
Ponto A
ModeloReal
0 50 100 150 20024
26
28
30
32
34
36
38
Tempo (min)
Tem
pera
tura
(°C
)
Ponto B
ModeloReal
0 50 100 150 20025
30
35
40
Tempo (min)
Tem
pera
tura
(°C
)
Ponto C
ModeloReal
0 50 100 150 20024
26
28
30
32
34
36
38
Tempo (min)
Tem
pera
tura
(°C
)
Ponto D
ModeloReal
0 50 100 150 20024
26
28
30
32
34
36
38
Tempo (min)
Tem
pera
tura
(°C
)
Ponto A
ModeloReal
0 50 100 150 20045
50
55
60
65
Tempo (min)
Um
idad
e R
elat
iva
(%)
Ponto A
ModeloReal
Fonte: Proprio Autor
Θa = [−0, 0265 3, 066 −35, 9318]T (6.12)
Θb = [−0, 0351 3, 5846 −43, 7247]T (6.13)
Θc = [−0, 0453 4, 2987 −55, 5543]T (6.14)
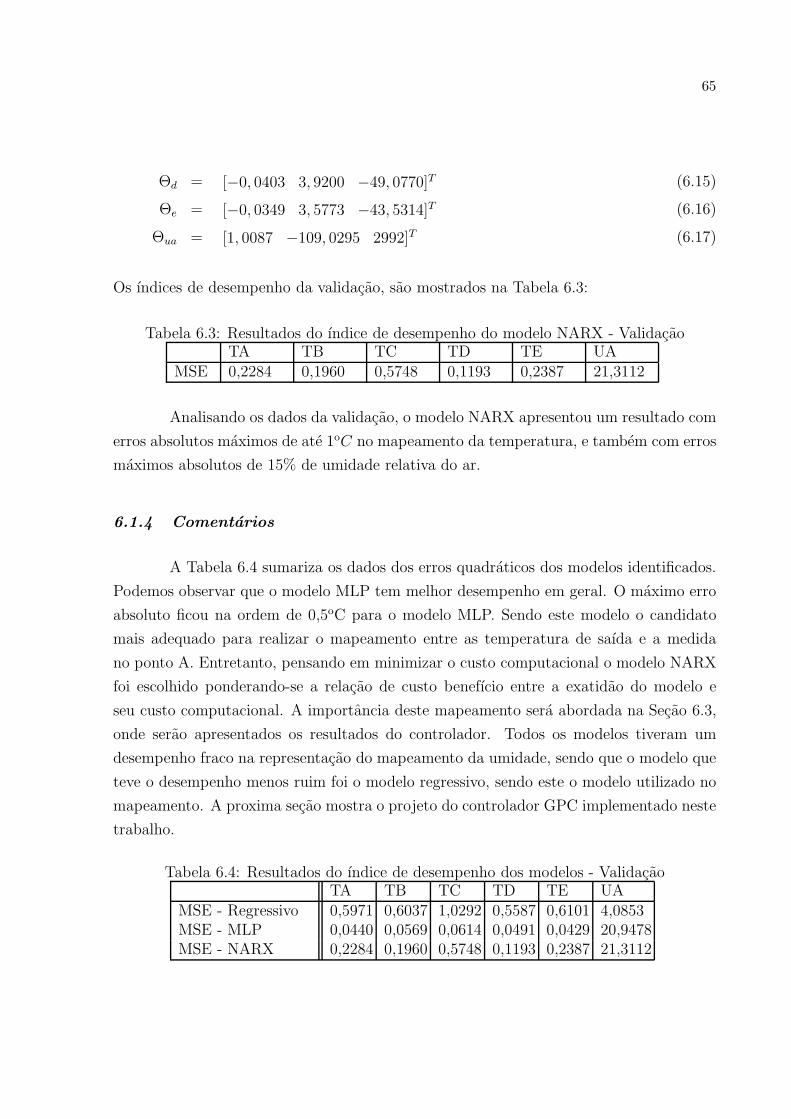
65
Θd = [−0, 0403 3, 9200 −49, 0770]T (6.15)
Θe = [−0, 0349 3, 5773 −43, 5314]T (6.16)
Θua = [1, 0087 −109, 0295 2992]T (6.17)
Os ındices de desempenho da validacao, sao mostrados na Tabela 6.3:
Tabela 6.3: Resultados do ındice de desempenho do modelo NARX - ValidacaoTA TB TC TD TE UA
MSE 0,2284 0,1960 0,5748 0,1193 0,2387 21,3112
Analisando os dados da validacao, o modelo NARX apresentou um resultado com
erros absolutos maximos de ate 1oC no mapeamento da temperatura, e tambem com erros
maximos absolutos de 15% de umidade relativa do ar.
6.1.4 Comentarios
A Tabela 6.4 sumariza os dados dos erros quadraticos dos modelos identificados.
Podemos observar que o modelo MLP tem melhor desempenho em geral. O maximo erro
absoluto ficou na ordem de 0,5oC para o modelo MLP. Sendo este modelo o candidato
mais adequado para realizar o mapeamento entre as temperatura de saıda e a medida
no ponto A. Entretanto, pensando em minimizar o custo computacional o modelo NARX
foi escolhido ponderando-se a relacao de custo benefıcio entre a exatidao do modelo e
seu custo computacional. A importancia deste mapeamento sera abordada na Secao 6.3,
onde serao apresentados os resultados do controlador. Todos os modelos tiveram um
desempenho fraco na representacao do mapeamento da umidade, sendo que o modelo que
teve o desempenho menos ruim foi o modelo regressivo, sendo este o modelo utilizado no
mapeamento. A proxima secao mostra o projeto do controlador GPC implementado neste
trabalho.
Tabela 6.4: Resultados do ındice de desempenho dos modelos - ValidacaoTA TB TC TD TE UA
MSE - Regressivo 0,5971 0,6037 1,0292 0,5587 0,6101 4,0853MSE - MLP 0,0440 0,0569 0,0614 0,0491 0,0429 20,9478MSE - NARX 0,2284 0,1960 0,5748 0,1193 0,2387 21,3112

66
6.2 Projeto do Controlador Preditivo
Para dar inıcio ao projeto do controlador GPC, inicialmente foi realizado um
ensaio mostrado na Figura 6.9.
Figura 6.9: Dados do ensaio utilizado para identificacao do modelo do processo.
0 20 40 60 80 100 120 140 160 1800
5
10
15
20
25
30
35
40
45
50
Tempo (min)
Raz
ão C
íclic
a (%
)
Entrada TemperaturaEntrada Umidade
Fonte: Proprio Autor
A partir destes dados foi avaliado que o comportamento das malhas de umidade
e temperatura se aproximava de um sistema de primeira ordem com atraso de transporte.
Utilizando o metodo dos mınimos quadrados chegou-se aos seguintes modelos:
θ(s)
AT (s)=
0, 218
(87, 37s+ 1)e−5,77s (6.18)
U(s)
AU (s)=
0, 183
(11, 13s+ 1)e−1,02s (6.19)
Sendo θ(s) a transformada de Laplace do sinal de temperatura do ar no interior da cupula,
AT (s) a acao de controle aplicada ao resistor de aquecimento do ar, U(s) a transformada
de Laplace do sinal de umidade relativa do ar no interior da cupula, AU(s) e a acao
de controle aplicada ao resistor de umidificacao. As acoes de controle assumem valores
entre 0 e 100 que correspondem ao percentual mınimo (ausencia de energia) e maximo da
potencia nominal do respectivo resistor em que a acao de controle e aplicada. O processo
da incubadora, as malhas de temperatura e umidade interagem entre si, configurando
o acoplamento destas malhas. Decidiu-se fazer um controlador GPC independente para
cada malha, e tratar o acoplamento entre elas como um disturbio a ser compensado
pelo controlador. Embora o acoplamento nao seja tratado pelo controlador, estas malhas
tambem foram estimadas para simular o efeito do acoplamento no controle das malhas.
A matriz de transferencia estimada e mostrada na Equacao (6.20).
G(s) =
[0,183
(11,13s+1)e−1,02s −0.4156
(58,83s+1)e−1,78s
0,3731(853.6s+1)
e−4.37s 0,218(87,37s+1)
e−5,77s
](6.20)

67
O resultado da identificacao e mostrado nas Figuras 6.10 e 6.11. A identificacao dos
modelos com funcoes de transferencia pressupoem condicoes iniciais nulas, assim na iden-
tificacao os dados reais sao subtraıdos do seu valor inicial.
Figura 6.10: Comparacao do modelo identificado e o dados reais da malha de temperatura.
0 20 40 60 80 100 120 140 160 180−1
0
1
2
3
4
5
6
7
8
Tempo (min)
Temp. real (°C)Temp. modelo (°C)
Fonte: Proprio Autor
Figura 6.11: Comparacao do modelo identificado e o dados reais da malha de umidade.
0 20 40 60 80 100 120 140 160 180−18
−16
−14
−12
−10
−8
−6
−4
−2
0
2
Umid. real (%)Umid. modelo (%)
Fonte: Proprio Autor
Inicialmente foi desenvolvido o controlador para a malha de temperatura. Como
primeiro ajuste do controlador foram utilizados os seguintes parametros:

68
• N = 70, onde N1 = Ld +1 e N2 = Ld +N , sendo Ld o atraso discreto do processo;
• Nu = 1;
• λ = 0;
• C(q) = 1;
• Ts = 24s.
O valor de N = 70 foi escolhido por este ser o numero de amostras que engloba
grande parte da dinamica do processo, quanto maior este parametro mais lenta sera a res-
posta do processo, entretanto valores baixos de N podem gerar um sobre-sinal excessivo,
assim um valor intermediario foi adotado de forma a conseguir um equilıbrio entre essas
caracterısticas. Para plantas estaveis em malha aberta a nao ponderacao do controle uti-
lizando Nu = 1 e λ = 0 gera boas respostas e torna o ajuste do controlador mais simples,
sendo adotada esta estrategia no controlador projetado.
Para minimizar a interferencia das restricoes da acao de controle foi utilizada a
tecnica de anti-windup, o sinal de controle tem como limite maximo 100 e limite mınimo 0.
Na simulacao foi adicionado um ruıdo de 0, 1oC para aproximar o ensaio do experimento
real. A simulacao resultou na instabilidade da saıda da temperatura e da acao de controle
como pode ser visto na Figura 6.12:
Figura 6.12: Resultado da simulacao da malha de temperatura com α = 0.
0 50 100 150 200 25025
30
35
40
Tempo (min)
Tem
pera
tura
(ºC
)
ReferênciaTemperatura
0 50 100 150 200 2500
20
40
60
80
100
Tempo (min)
Raz
ão C
íclic
a (%
)
Ação de Controle
Fonte: Proprio Autor
Diante deste problema, resolveu-se utilizar um modelo para as pertubacoes dado
pelo polinomio C(q), anteriormente escolhido igual a 1, para filtrar o ruıdo da saıda.
Apos testes, escolheu-se o modelo que obteve melhores resultados para o processo. O

69
modelo escolhido (ver Eq. 6.21) tem um parametro de ajuste denominado α, quanto mais
proximo de 1 mais forte e acao do filtro. Apesar de um modelo de C(q) de segunda ordem
ser suficiente quando utilizado modelos de primeira ordem no controlador, optou-se por
utilizar um polinomio C(q) de terceira ordem pela praticidade de deixar o controlador
preparado para o uso de modelos de segunda ordem como sera visto mais adiante neste
capıtulo. Deve-se ter em mente que uma acao mais forte do filtro diminui o tempo de
resposta do sistema podendo comprometer tambem a rejeicao a pertubacoes. O ajuste
de α e pensado de forma a ter melhor compromisso entre o ruıdo da acao de controle e o
tempo de reacao do sistema.
C(q) = (1− αq−1)3 (6.21)
O controlador entao foi alterado para insercao do polinomio C(q) e ajustou-se α = 0, 9. Foi
especificado um controlador para cada malha individualmente. Os parametros utilizados
para o controlador da malha de umidade foram:
• N = 30, onde N1 = Ld +1 e N2 = Ld +N , sendo Ld o atraso discreto do processo.
• Nu = 1;
• λ = 0;
• α = 0, 9;
• Ts = 24s.
Simulando com o novo controlador obteve-se o resultado mostrado na figura 6.13:
Figura 6.13: Resultados da simulacao do controlador proposto.
0 20 40 60 80 100 120 140 160 18025
30
35
40
Tempo (min)
Tem
pera
tura
(ºC
)
ReferênciaTemperatura
0 20 40 60 80 100 120 140 160 1800
20
40
60
80
100
Tempo (min)
Raz
ão C
íclic
a (%
)
Ação de Controle
(a) Resultado da simulacao da malha de
temperatura com α = 0, 9.
0 20 40 60 80 100 120 140 160 18044
46
48
50
52
Tempo (min)
Um
idad
e R
elat
iva(
%)
ReferênciaUmidade
0 20 40 60 80 100 120 140 160 1800
20
40
60
80
100
Tempo (min)
Raz
ão C
íclic
a (%
)
Ação de Controle
(b) Resultado da simulacao da malha de
umidade com α = 0, 9.
Fonte: Proprio Autor

70
De posse destes resultados, o proximo passo foi aplicar o controlador projetado na
incubadora para enfim validar seu funcionamento. A proxima secao aborda os resultados
obtidos.
6.3 Resultados
Na validacao do controlador dois criterios foram avaliados:
1. Se o controlador obedece as restricoes impostas pela norma NBR IEC 60601-2/19
em relacao aos valores de temperatura e umidade.
2. O desempenho do controlador em comparacao a incubadora comercial.
3. As medidas de temperatura e umidade sao tomadas no ponto central do colchao
assim como e definido pela norma em ambos os ensaios.
Para avaliar o controlador desenvolvido segundo os criterios citados, foi executado o ensaio
da norma proposto na sub-clausula 50.109 que diz:
Apos o ajuste da TEMPERATURA DE CONTROLE na forma descritano ensaio a seguir, o excesso da TEMPERATURA DA INCUBADORAnao deve exceder 2oC e a CONDICAO DE TEMPERATURA CONS-TANTE deve ser restaurada em menos de quinze minutos. A conformi-dade deve ser verificada pelo seguinte ensaio:A INCUBADORA e operada como uma INCUBADORA COM TEM-PERATURA DO AR CONTROLADA, em uma TEMPERATURA DECONTROLE de 32oC ate que a CONDICAO DE TEMPERATURACONSTANTE seja alcancada. O controle da temperatura e entao ajus-tado para uma TEMPERATURA DE CONTROLE de 36oC. A sobrele-vacao da TEMPERATURA DA INCUBADORA e o tempo para alcan-car a nova CONDICAO DE TEMPERATURA CONSTANTE a partirda primeira passagem por 36oC devem ser medidos (ABNT, 2000).
Inicialmente foi executado o ensaio proposto com a incubadora comercial. Os
resultados do ensaio com o controlador da incubadora comercial para a temperatura e
umidade sao mostrados nas Figuras 6.14 e 6.15:

71
Figura 6.14: Resultado do controlador pre-existente para temperatura durante o ensaio
do item 50.109 da norma.
0 50 100 150 200 25026
28
30
32
34
36
38
40Ensaio com controlador comercial
Tempo (min)
Tem
pera
tura
(ºC
)
Temperatura Média da IncubadoraReferência
Fonte: Proprio Autor
Figura 6.15: Resultado do controlador pre-existente para umidade durante o ensaio do
item 50.109 da norma.
0 50 100 150 200 25044
45
46
47
48
49
50
51Ensaio com controlador GPC desenvolvido
Tempo (min)
Um
idad
e R
elat
iva
(%)
Umidade Relativa da IncubadoraReferência
Fonte: Proprio Autor
Avaliou-se as temperaturas, como descrito no Capıtulo 2, para as temperaturas
de controle de 32oC e 36oC, o controle da umidade foi ajustado para 50%, a norma so
determina que o valor da umidade nao seja diferente em mais de 10% do medido no
ponto A. Este valor de umidade foi escolhido devido a regiao de conforto do neonato se
situar entre 40% e 60% de umidade relativa (ARONE, 1993). Foram obtidos os seguintes
resultados mostrados nas Tabelas 6.5, 6.6 e 6.7. Para efeito de simplificacao de resultados,
o ensaio foi executado apenas com o colchao em posicao normal. Analisando o sinal da
umidade mostrado na Figura 6.15 pode-se ver que a umidade relativa no ponto A nao
consegue seguir a referencia. Entretanto, como visto no Capıtulo 2, a norma admite uma
diferenca de ate 10% entre a umidade de referencia e a umidade medida na posicao central
(ponto A).

72
Tabela 6.5: Resultados do ensaio com a incubadora comercial - Tc = 32oC.TEMPERATURA TEMPERATURA
MEDIATEMPERATURAMEDIA DA INCU-BADORA
ERRO
Ponto A 32,44 32,44 0,00Ponto B 32,6 32,44 -0,16Ponto C 32,93 32,44 -0,49Ponto D 32,68 32,44 -0,24Ponto E 32,74 32,44 -0,3
Tabela 6.6: Resultados do ensaio com a incubadora comercial - Tc = 36oC.
TEMPERATURATEMPERATURAMEDIA
TEMPERATURAMEDIA DA INCU-BADORA
ERRO
Ponto A 37,15 37,15 0,00Ponto B 37,64 37,15 -0,49Ponto C 38,07 37,15 -0,91Ponto D 37,27 37,15 -0,24Ponto E 37,58 37,15 -0,42
Como pode ser visto nas Tabelas 6.5 e 6.6, as relacoes entre as temperaturas me-
dias nos cinco pontos especificados e a temperatura media da incubadora, estao na faixa
permitida pela norma que admite uma diferenca maxima de 0,8oC. A Tabela 6.7 retrata os
requisitos do ensaio e ainda apresenta a diferenca entre a TEMPERATURA MEDIA DA
INCUBADORA e a TEMPERATURA DE CONTROLE visto na coluna ”DIFERENCA
DA TEMPERATURA DE CONTROLE”. O nıvel de sobre-sinal foi medido em relacao
a temperatura em CONDICAO DE TEMPERATURA CONSTANTE, e nao em relacao
a referencia, visto que a norma especifica que pode existir uma diferenca de no maximo
1,5oC entre a TEMPERATURA MEDIA DA INCUBADORA e a TEMPERATURA DE
CONTROLE. Com Tc = 32oC a norma so especifica a questao da diferenca das tempera-
turas, que neste caso, ficou em 0, 44oC obedecendo portanto a norma. Os outros requisitos
tambem foram registrados nesta temperatura de controle como forma de comparacao com
o controlador proposto, estes sao avaliados pela norma somente em Tc = 36oC.
Tabela 6.7: Resultados do ensaio com a incubadora comercial
TEMPERATURADE CONTROLE
Tempo para alcancara CONDICAO DETEMPERATURACONSTANTE
SOBRE-SINAL
DIFERENCADA TEMPE-RATURA DECONTROLE
Tc = 32oC29 minutos e 45 segun-dos
1, 8oC 0, 44oC
Tc = 36oC maior que 2 horas 1, 0oC 1, 15oC

73
Quando avaliados os parametros da CONDICAO DE TEMPERATURA CONS-
TANTE e o tempo de recuperacao na mudanca de referencia de 32o para 36oC, a in-
cubadora comercial nao ficou dentro do especificado pela norma, que estabelece que a
temperatura deve se recuperar em 15 minutos.
Podemos observar que o controlador apresenta um comportamento oscilatorio em
torno da referencia com amplitude de 1oC de erro em regime permanente caracterizando
que o controlador da incubadora comercial nao tenha sido bem sintonizado neste ponto
de operacao.
Como a temperatura nao estabilizou em 2 horas, para se avaliar a diferenca entre a
TEMPERATURA MEDIA DA INCUBADORA e a TEMPERATURA DE CONTROLE,
utilizou-se o conceito definido pela norma, porem adotando uma variacao de 2oC. Com
este criterio a incubadora obedeceu o requisito da diferenca de temperatura ficando com
esta diferenca em 1, 15oC.
A Incubadora GPAR utilizando o controlador GPC proposto foi submetida ao
ensaio de validacao. O comportamento da temperatura media durante o ensaio e visto na
Figura 6.16, enquanto que o comportamento do sinal da umidade e mostrado na Figura
6.17.
Figura 6.16: Resultado do controlador proposto durante o ensaio do item 50.109 da
norma(Temperatura).
0 20 40 60 80 100 120 140 160 18026
28
30
32
34
36
38
40Ensaio com controlador GPC desenvolvido
Tempo (min)
Tem
pera
tura
(ºC
)
Temperatura Média da IncubadoraReferência
Fonte: Proprio Autor

74
Figura 6.17: Resultado do controlador proposto com mapeamento durante o ensaio do
item 50.109 da norma(Umidade).
0 20 40 60 80 100 120 140 160 18044
46
48
50
52
54
56
58
60Ensaio com controlador GPC desenvolvido
Tempo (min)
Um
idad
e R
elat
iva
(%)
Umidade Relativa da IncubadoraReferência
Fonte: Proprio Autor
O sinal da umidade relativa nao seguiu a referencia pretendida ficando num valor
proximo a 45%, entretanto este e uma valor aceitavel pelo norma pois esta permite um
diferenca de ate 10% entre esses valores.
Avaliou-se as temperaturas conforme descrito anteriormente para Tc = 32oC e
Tc = 36oC. Os resultados obtidos mostrados nas Tabelas 6.8, 6.9 e 6.10 para o uso do
controlador proposto.
Tabela 6.8: Resultados do ensaio com a Incubadora GPAR com o controlador proposto -Tc = 32oC
TEMPERATURA TEMPERATURAMEDIA
TEMPERATURAMEDIA DA INCU-BADORA
ERRO
Ponto A 31,61 31,61 0,00Ponto B 31,69 31,61 -0,08Ponto C 31,93 31,61 -0,32Ponto D 31,79 31,61 -0,18Ponto E 31,92 31,61 -0,31
Como pode ser visto nas Tabelas 6.8 e 6.9, as relacoes entre as temperaturas
medias nos pontos especificados e a temperatura media da incubadora estao na faixa
permitida pela norma que admite uma diferenca maxima de 0,8oC. O resultado se encontra
dentro do esperado visto que estas caracterısticas tem uma influencia maior da estrutura
fısica da incubadora e do fluxo de ar dentro da cupula, logo podemos inferir que as
alteracoes realizadas na incubadora nao interferiram nestes fatores.
A tabela 6.10 retrata os requisitos do ensaio e ainda diferenca da TEMPERA-
TURA MEDIA DA INCUBADORA em relacao a TEMPERATURA DE CONTROLE.

75
Tabela 6.9: Resultados do ensaio com a Incubadora GPAR com o controlador proposto -Tc = 36oC
TEMPERATURATEMPERATURAMEDIA
TEMPERATURAMEDIA DA INCU-BADORA
ERRO
Ponto A 37,36 37,36 0,00Ponto B 37,35 37,36 -0,01Ponto C 38,00 37,36 -0,64Ponto D 37,34 37,36 0,02Ponto E 37,52 37,36 -0,16
Tabela 6.10: Resultados do ensaio com a Incubadora GPAR com controlador proposto
TEMPERATURADE CONTROLE
Tempo para alcancara CONDICAO DETEMPERATURACONSTANTE
SOBRE-SINAL
DIFERENCADA TEMPE-RATURA DECONTROLE
Tc = 32oC28 minutos e 10 segun-dos
1, 0oC 0, 38oC
Tc = 36oC3 minutos e 24 segun-dos
0, 2oC 1, 35oC
O nıvel de sobre-sinal, conforme explicado no ensaio anterior, foi medido em relacao a
temperatura em CONDICAO DE TEMPERATURA CONSTANTE. Com Tc = 32oC,
o requisito da diferenca das temperaturas que neste caso ficou em 0, 38oC obedecendo
portanto a norma e tendo um desempenho ligeiramente melhor que o controlador comer-
cial. Os outros requisitos tambem foram registrados nesta temperatura de controle como
forma de comparacao com o controlador da incubadora comercial. Podemos observar
que o controlador proposto conseguiu diminuir o tempo para alcancar a CONDICAO DE
TEMPERATURA CONSTANTE e o sobre-sinal ficou em torno de 1, 0oC. Quando avali-
ados os parametros da CONDICAO DE TEMPERATURA CONSTANTE e o tempo de
recuperacao na mudanca de referencia de 32o para 36oC a incubadora com o controlador
proposto ficou dentro do especificado pela norma. Com esta condicao sendo alcancada em
3 minutos e 24 segundos com um sobre-sinal maximo de 0, 2oC. O controlador obedeceu
ainda o requisito da diferenca de temperatura ficando com esta diferenca em 1, 35oC.
O controlador proposto conseguiu obedecer os requisitos especificados pela norma
e quando comparado ao controlador da incubadora comercial, obteve um aproveitamento
melhor em todos os requisitos avaliados, diminuindo o sobre-sinal e o tempo de resposta em
ambas as temperaturas de controle sobretudo em Tc = 36oC onde o controlador comercial
tem um desempenho insuficiente. Embora tenha seguido os requisitos da norma pode-
se ver que o controlador chegou bem perto dos limites imposto por esta em relacao a
diferenca entre a TEMPERATURA MEDIA DA INCUBADORA e a TEMPERATURA
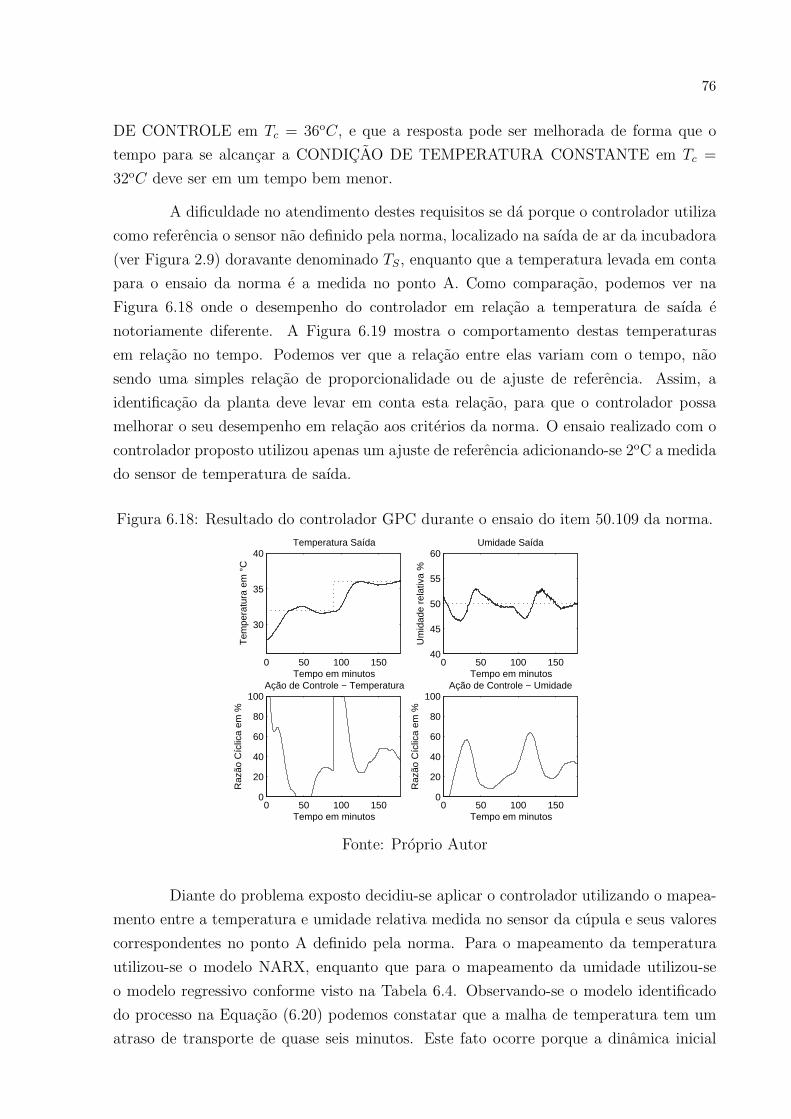
76
DE CONTROLE em Tc = 36oC, e que a resposta pode ser melhorada de forma que o
tempo para se alcancar a CONDICAO DE TEMPERATURA CONSTANTE em Tc =
32oC deve ser em um tempo bem menor.
A dificuldade no atendimento destes requisitos se da porque o controlador utiliza
como referencia o sensor nao definido pela norma, localizado na saıda de ar da incubadora
(ver Figura 2.9) doravante denominado TS, enquanto que a temperatura levada em conta
para o ensaio da norma e a medida no ponto A. Como comparacao, podemos ver na
Figura 6.18 onde o desempenho do controlador em relacao a temperatura de saıda e
notoriamente diferente. A Figura 6.19 mostra o comportamento destas temperaturas
em relacao no tempo. Podemos ver que a relacao entre elas variam com o tempo, nao
sendo uma simples relacao de proporcionalidade ou de ajuste de referencia. Assim, a
identificacao da planta deve levar em conta esta relacao, para que o controlador possa
melhorar o seu desempenho em relacao aos criterios da norma. O ensaio realizado com o
controlador proposto utilizou apenas um ajuste de referencia adicionando-se 2oC a medida
do sensor de temperatura de saıda.
Figura 6.18: Resultado do controlador GPC durante o ensaio do item 50.109 da norma.
0 50 100 150
30
35
40Temperatura Saída
Tem
pera
tura
em
°C
Tempo em minutos0 50 100 150
40
45
50
55
60Umidade Saída
Um
idad
e re
lativ
a %
Tempo em minutos
0 50 100 1500
20
40
60
80
100Ação de Controle − Temperatura
Raz
ão C
íclic
a em
%
Tempo em minutos0 50 100 150
0
20
40
60
80
100Ação de Controle − Umidade
Raz
ão C
íclic
a em
%
Tempo em minutos
Fonte: Proprio Autor
Diante do problema exposto decidiu-se aplicar o controlador utilizando o mapea-
mento entre a temperatura e umidade relativa medida no sensor da cupula e seus valores
correspondentes no ponto A definido pela norma. Para o mapeamento da temperatura
utilizou-se o modelo NARX, enquanto que para o mapeamento da umidade utilizou-se
o modelo regressivo conforme visto na Tabela 6.4. Observando-se o modelo identificado
do processo na Equacao (6.20) podemos constatar que a malha de temperatura tem um
atraso de transporte de quase seis minutos. Este fato ocorre porque a dinamica inicial

77
Figura 6.19: Comportamento das temperaturas no ponto A e na saıda durante o ensaiodo item 50.109 da norma.
0 20 40 60 80 100 120 140 160 18024
26
28
30
32
34
36
38TA e TS durante o ensaio da norma
Tempo (min)
Tem
pera
tura
(ºC
)
Temperatura no ponto ATemperatura Saída
Fonte: Proprio Autor
Figura 6.20: Comportamento das umidades no ponto A e na saıda durante o ensaio doitem 50.109 da norma.
0 20 40 60 80 100 120 140 160 18044
46
48
50
52
54
56
58
60UA e US durante o ensaio da norma
Tempo (min)
Um
idad
e R
elat
iva
(%)
Umidade no ponto AUmidade na Saída
Fonte: Proprio Autor
(mais lenta) do sinal da temperatura e modelada como o tempo morto alem do fato que
a nova identificacao tem que levar em conta o mapeamento dos sinais de temperatura e
umidade. Decidiu-se entao utilizar um modelo de segunda ordem como forma de melhorar
os modelos identificados ja que a insercao do modelo de mapeamento altera a dinamica
do processo. Assim sobre os dados do ensaio mostrados na Figura 6.9 convertidos com os
modelos de mapeamento de temperatura e umidade relativa foi identificada uma nova ma-
triz de transferencia com plantas lineares de segunda ordem com atraso para o sistema da
incubadora neonatal. A nova matriz de transferencia identificada e mostrada na equacao
6.22.

78
G(s) =
[0,1525
(46,34s2+13,61s+1)e−2s −0.2558
(363,7s2+38,23s+1)e−0,01s
0,2573(4364s2+134,2s+1)
e−2s 0,1668(420,7s2+45,62s+1)
e−1,69s
](6.22)
Utilizando a nova planta identificada, executou-se novamente o ensaio da norma
com o contralador proposto utilizando os seguintes parametros para a malha de tempera-
tura:
• N = 70, onde N1 = Ld +1 e N2 = Ld +N , sendo Ld o atraso discreto do processo.
• Nu = 1;
• λ = 0;
• α = 0, 9
• Ts = 24s
Enquanto que os parametros ajustados para a malha de umidade foram dados
por:
• N = 30, onde N1 = Ld +1 e N2 = Ld +N , sendo Ld o atraso discreto do processo.
• Nu = 1;
• λ = 0;
• α = 0, 9;
• Ts = 24s.
As Figuras 6.21 e 6.22 mostram o resultado do ensaio executado utilizando o con-
trolador proposto em conjunto com o modelo de mapeamento, enquanto que os indicadores
avaliados no ensaio sao mostrados nas Tabelas 6.11, 6.12 e 6.13.

79
Figura 6.21: Resultado do controlador proposto com mapeamento durante o ensaio do
item 50.109 da norma (Temperatura).
0 20 40 60 80 100 120 140 160 18024
26
28
30
32
34
36
38
40Ensaio com controlador GPC desenvolvido
Tempo (min)
Tem
pera
tura
(ºC
)
Temperatura Média da IncubadoraReferência
Fonte: Proprio Autor
Figura 6.22: Resultado do controlador proposto com mapeamento durante o ensaio do
item 50.109 da norma(Umidade).
0 20 40 60 80 100 120 140 160 18045
45.5
46
46.5
47
47.5
48
48.5
49
49.5
50Ensaio com controlador GPC desenvolvido
Tempo (min)
Um
idad
e R
elat
iva
(%)
Umidade Relativa da IncubadoraReferência
Fonte: Proprio Autor

80
Tabela 6.11: Resultados do ensaio com a incubadora com o controlador proposto utili-
zando o mapeamento - Tc = 32oC.
TEMPERATURA TEMPERATURA
MEDIA
TEMPERATURA
MEDIA DA INCU-
BADORA
ERRO
Ponto A 32,13 32,13 0,00
Ponto B 32,25 32,13 -0,12
Ponto C 32,59 32,13 -0,46
Ponto D 32,44 32,13 -0,30
Ponto E 32,46 32,13 -0,33
Tabela 6.12: Resultados do ensaio com a incubadora com o controlador proposto utili-
zando o mapeamento - Tc = 36oC.
TEMPERATURATEMPERATURA
MEDIA
TEMPERATURA
MEDIA DA INCU-
BADORA
ERRO
Ponto A 36,34 36,34 0,00
Ponto B 36,56 36,34 -0,22
Ponto C 36,88 36,34 -0,54
Ponto D 36,44 36,34 -0,10
Ponto E 36,67 36,34 -0,33
Tabela 6.13: Resultados do ensaio com a incubadora com controlador proposto utilizando
o mapeamento.
TEMPERATURA
DE CONTROLE
Tempo para alcancar
a CONDICAO DE
TEMPERATURA
CONSTANTE
SOBRE-
SINAL
DIFERENCA
DA TEMPE-
RATURA DE
CONTROLE
Tc = 32oC0 minutos e 0 segun-
dos0, 9oC 0, 13oC
Tc = 36oC0 minutos e 0 segun-
dos0, 2oC 0, 34oC
A Tabela 6.13 retrata os requisitos do ensaio e ainda a diferenca entre a TEMPE-
RATURA MEDIA DA INCUBADORA e a TEMPERATURA DE CONTROLE. O nıvel
de sobre-sinal, analogamente aos ensaios anteriores, foi medido em relacao a temperatura

81
em CONDICAO DE TEMPERATURA CONSTANTE. Com Tc = 32oC, o requisito da
diferenca das temperaturas ficou em 0, 13oC obedecendo portanto a norma e tendo um de-
sempenho ligeiramente melhor que o controlador proposto sem o mapeamento. Observa-se
que o controlador com mapeamento conseguiu diminuir o tempo para alcancar a CON-
DICAO DE TEMPERATURA CONSTANTE para zero uma vez que o sobre-sinal ficou
em torno de 0, 9oC e a temperatura estabilizou em torno de 32, 13oC. Quando avalia-
dos os parametros da CONDICAO DE TEMPERATURA CONSTANTE e o tempo de
recuperacao na mudanca de referencia de 32o para 36oC a incubadora com o controlador
proposto ficou dentro do especificado pela norma, com esta condicao sendo alcancada com
um sobre-sinal maximo de 0, 2oC. O controlador obedeceu ainda o requisito da diferenca
de temperatura ficando com esta diferenca em 0, 34oC.
E observado que o tempo para alcancar a referencia do controlador com mapea-
mento aumentou em ate 8 minutos em relacao ao controlador comercial e ate 4 minutos
em relacao ao controlador sem mapeamento, porem o controlador com mapeamento tem
sobre-sinal menor que os outros dois controladores, e observando do ponto de vista da
seguranca do neonato um sobre-sinal reduzido e mais desejavel em detrimento do tempo
de resposta elevado uma vez que variacoes rapidas de temperatura podem causar danos
a saude do recem-nascido, segundo Arone (1993).
O controlador proposto conseguiu obedecer os requisitos especificados pela norma
e quando comparado ao controlador da incubadora comercial, obteve um aproveitamento
melhor em todos os requisitos avaliados, diminuindo o sobre-sinal e a diferenca da tempe-
ratura no ponto A em ambas as temperaturas de controle sobretudo em Tc = 36oC onde
o controlador sem o mapeamento apresentou uma diferenca de 1, 35oC, enquanto que a
diferenca apresentada pelo controlador com mapeamento e de 0, 34oC. Pode-se tambem
constatar que mesmo utilizando o mapeamento do sinal de umidade no ponto A, nao se
conseguiu seguir a referencia pretendida, entretanto o resultado obtido se encontra den-
tro do exigido pela norma, uma vez que esta admite uma diferenca de ate 10% entre a
referencia e o valor medido no ponto A.
6.4 Conclusoes
Neste capıtulo foi mostrado os modelos desenvolvidos, para mapeamento entre
temperaturas e modelos que descrevem a dinamica do processo onde a temperatura e a
umidade sao a variaveis controladas. Os modelos de mapeamento apresentaram erros de
ate 2oC, sendo que o modelo realizado com redes neurais foi o mais promissor com erros
maximos de 0, 5oC. Ja os modelos de dinamica do processo foram identificados de forma
satisfatoria e representam o processo na regiao do ponto de operacao deste com erro menor

82
que 0, 2◦C. Foi apresentado o controlador proposto e seu desempenho foi comparado com
a norma e com o controlador da incubadora comercial. O controlador proposto conseguiu
atingir os requisitos da norma e ter um desempenho melhor que o comercial, quando
confrontados os requisitos de tempo para alcancar a CONDICAO DE TEMPERATURA
CONSTANTE, e o sobre-sinal nas referencias de 32oC e 36oC.
Quando utilizado o modelo de mapeamento NARX em conjunto com o controla-
dor houve uma melhora nos ındices avaliados, sobretudo o requisito da diferenca entre a
temperatura medida no ponto A e a referencia em ambos os pontos de operacao. Apesar
do modelo NARX nao ter sido o melhor modelo identificado, o seu uso se mostrou eficiente
pelos resultados alcancados e sua facil implementacao quando comparado ao modelo de
redes neurais superando assim a suas limitacoes na frente deste.
No proximo capıtulo sao feitas as consideracoes finais e novas propostas de tra-
balhos futuros.

83
7 CONCLUSOES
7.1 Comentarios Finais
Esta dissertacao se propos a projetar um controlador para o processo de tempera-
tura e umidade de uma incubadora neonatal, de modo a respeitar as condicoes requeridas
pela norma NBR IEC 60601-2-19 e ainda comparar o desempenho do controlador pro-
jetado com o controlador existente na incubadora comercial. Neste sentido o objetivo
principal desta dissertacao foi completado uma vez que o controlador proposto conseguiu
respeitar os requisitos da norma nos ensaios testados e ainda se mostrou mais eficiente
que o controlador comercial ao qual foi comparado, nos requisitos pertinentes a norma.
O controlador proposto conseguiu reduzir o sobre-sinal para 0, 9oC para alcan-
car a referencia de 32oC, e a diferenca da temperatura de controle e a temperatura da
incubadora foi reduzida em 0, 13oC. Ja no ponto de operacao de 36oC, o sobre-sinal foi
reduzido em 1, 14oC e foi obtida uma reducao de 0, 81oC na diferenca entre a temperatura
de controle e a temperatura no ponto A. Dado a simplicidade do controlador GPC pro-
jetado, este pode ser embarcado no sistema microcontrolado sem muita dificuldade, uma
vez que foram projetados controladores SISO independentes para cada uma das malhas,
com horizontes de previsao pequenos, N = 70 e N = 30, para as malhas de temperatura
e umidade, respectivamente. O controlador lidou bem com a interacao entre as malhas,
consideradas nesta aplicacao, como disturbios no processo.
O sistema de avaliacao de desempenho construıdo como objeto deste trabalho
funcionou adequadamente, e foi de fundamental importancia para avaliar se o controlador
proposto segue as recomendacoes da norma. Por ter comunicacao via radio, o sistema
desenvolvido pode ser utilizado para avaliacao de outros tipos de incubadora sem a ne-
cessidade de modificacoes. O sistema pode ser melhorado com a inclusao de um sensor
de fluxo de ar e de um sensor de intensidade sonora, uma vez que a placa de controle
ja apresenta entradas digitais e analogicas preparadas para esta expansao. Os sistemas
de hardware e software implementado como objeto deste trabalho tornam a incubadora
neonatal comercial presente no laboratorio GPAR, uma plataforma de estudos deste pro-
cesso, uma vez que este sistema permite o controle dos atuadores e o monitoramento das
variaveis controladas, atraves do Matlabr, software bastante usado e conhecido no estudo
da engenharia de controle. Esse sistema contribui com a possibilidade de novas pesquisas
relacionadas ao processo da incubadora neonatal.

84
7.2 Trabalhos Futuros
Como trabalhos futuros a serem desenvolvidos na linha deste trabalho podemos
citar:
• Utilizacao do controlador GPC embarcado no sistema microcontrolado desenvolvido
na incubadora.
• Estudo de controladores nao-lineares para o processo da incubadora;
• Estudo de novas tecnicas que realizem o mapeamento entre as temperaturas da saıda
e a definida pela norma;
• Inclusao de um novo sensor de fluxo de ar e intensidade sonora no sistema de avali-
acao de desempenho, para que este avalie mais criterios definidos pela Norma.

85
REFERENCIAS
ABNT, A. B. N. T. Equipamento Eletromedico - Parte 2:Prescricoes particulares paraseguranca de incubadoras de recem-nascidos. Rio de Janeiro, 2000.
AGOSTINI, N. Sistema Computadorizado para Verificacao de Funcionalidade emIncubadoras Neonatais. Dissertacao — Universidade Federal de Santa Catarina,Florianopolis, (SC), July 2003.
AGUIRRE, L. A. Introducao a identificacao de sistemas. 3o revisada e ampliada. ed.[S.l.]: Editora UFMG, 2007. ISBN 978-85-7041-584-4.
AL-TAWEEL, Y. A. A Simulation Model of Infant Incubator Feedback System withHumidification and Temperature Control. Dissertacao — Faculty of Engineering andScience of Auckland University of Technology, Nova Zelandia, Agosto 2006.
ALBUQUERQUE, A. A. M. et al. Artificial neural networks in the estimation of measuresof temperature and humidity inside a neonatal incubator. In: HUFFEL, S. V. et al. (Ed.).BIOSIGNALS. SciTePress, 2012. p. 276–281. ISBN 978-989-8425-89-8. Disponıvel em:<http://dblp.uni-trier.de/db/conf/biostec/biosignals2012.html♯AlbuquerqueBTA12>.
ALBUQUERQUE, A. A. M. et al. Sistema Automatico de Avaliacao de Desempenho deIncubadoras Neonatais, segundo a norma NBR IEC 60.601-2-19. In: ANAIS DO XXIIICONGRESSO BRASILEIRO DE ENGENHARIA BIOMEDICA (CBEB). [S.l.: s.n.],2012.
ARONE, E. M. Estudo das variacoes da umidade relativa no microclima de umaincubadora infantil funcionando com e sem agua em seu reservatorio. Dissertacao —Faculdade Sao Camilo de Administracao Hospitalar e Saude Publica, Sao Paulo (SP),1993.
ASKIN, D. F.; WILSON, D. The high-risk newborn and family. In: HOCKENBURY,M. J.; WONG, D. L. (Ed.). Wong’s nursing care for infants and children. 9. ed. [S.l.]:Mosby, 2003. cap. 10, p. 315:389.
ASTROM, K.-J.; BOHLIN, T. Numerical identification of linear dynamic systemsfrom normal operating records. In: HAMMOND, P. H. (Ed.). Theory of Self-adaptiveControl Systems. [S.l.]: Second IFAC Symposium on the Theory of Self-adaptive ControlSystems, 1965.
BARBI, I. Eletronica de Potencia. Florianopolis: Editora UFSC, 1986.
BILLINGS, S.; CHEN, S.; KORENBERG, M. Representations of non-linear systems:The narmax model. Int. J. Control, v. 49, n. 6, p. 2157–2189, 1989.
CAMACHO, E. F.; BORDONS, C. Model Predictive Control. [S.l.]: Springer Verlag,1999.

86
CAVALCANTE, M. U. CONTROLE PREDITIVO ROBUSTO PARA SISTEMAS COMATRASO. Dissertacao — Universidade Federal do Ceara, Fortaleza, (CE), Fevereiro2011.
CHEN, S.; BILLINGS, S. Representations of non-linear systems: The narmax model.Int. J. Control, v. 49, n. 3, p. 1013–1032, 1989.
CLARKE, D.; MOTHADI, C.; TUFFS, P. Generalized predictive control. part i thebasic algorithm and part ii extensions and interpretations. Automatica, v. 23, n. 2, p.137–160, 1987.
COELHO, A. A.; COELHO, L. do S. Identificacao de Sistemas Dinamicos Lineares. 1.ed. [S.l.]: Editora da UFSC, 2004.
COELHO, M. C. S.; AGUIRRE, L. A.; CORREA, M. V. Metodologia para representacaode modelos narx polinomiais na forma de hammerstein e wiener. Tendencias emMatematica Aplicada e Computacional, v. 3, n. 1, p. 71–80, 2002.
CORREA, M. Identificacao Caixa-Cinza de Sistemas Nao-Lineares UtilizandoRepresentacoes NARMAX Racionais e Polinomiais. Tese (Tese de Doutorado) —UFMG, Belo Horizonte, MG, Brasil, 2001.
Datasus Ministerio da Saude. Incubadoras. january 2011. Acessado emhttp://svs.aids.gov.br/dashboard/mortalidade/infantil.show.mtw.
HABER, R.; BARS, R.; SCHMITZ, U. Predictive Control in Process Engineering.Weinheim, Germany: WILEY-VCH Verlag, 2011.
HAYKIN, S. Neural Networks and Learning Machines. 3rd. Upper Saddle River, N.J.:Prentice-Hall, 2008.
HORNIK, K.; STINCHCOMBE, M.; WHITE, H. Multilayer feedforward networks areuniversal approximators. Neural Networks, v. 2, n. 5, p. 359–366, January 1989.
IAIONE, F.; MORAES, R. Equipamento para avaliacao de funcionalidade de incubadoraspara recem nascidos. Revista Brasileira de Engenharia Biomedica, v. 18, n. 3, p. 151–162,set-dez 2002.
LEONTARITIS, I. J.; BILLINGS, S. A. Input-output parametric models for nonlinearsystems - part i: deterministic non-linear systems; input-output parametric models fornon-linear systems - part ii: sthocastic non-linear systems. Int. J. Control, v. 41, n. 2, p.303–344, 1985.
LJUNG, L. SYSTEM IDENTIFICTION: Theory of the user. [S.l.]: Pretince Hall, 1987.ISBN 0-13-881640-9.
MICROCHIP. 0.5◦C Maximum Accuracy Digital Temperature Sensor. Octuber 2011.Retrieved in http://ww1.microchip.com/downloads/en/DeviceDoc/25095A.pdf.
NETO, J. de O. B. CONTROLE MULTIVARIAVEL DE TEMPERATURA E UMIDADEAPLICADO EM INCUBADORAS NEONATAIS. Dissertacao — Universidade Federaldo Ceara, Fortaleza, (CE), Agosto 2010.

87
NIKOLAOU, M.; VUTHANDAM, P. Fir model identification: Achieving parsimonythrough kernel compression with wavelets. AIChE J, v. 1, n. 44, p. 141–150, 1998.
OGATA, K. Engenharia de Controle Moderno. 3o. ed. [S.l.]: LTC, 1998.
OLIVEIRA, M. A. de. SISTEMA DE ENSAIO DE DESEMPENHO DE INCUBADORANEONATAL. Dissertacao — Universidade Federal de Santa Catarina, Florianopolis,(SC), July 2007.
RASHID, M. H. Eletronica de Potencia: Circuitos, Dispositivos e Aplicacoes. 1a edicao.ed. Sao Paulo: Editora Makron Books, 1999. ISBN 85-346-0598-X.
REFORSUS, M. da Saude. Secretaria de Gestao de Investimentos em S. P. EquipamentosMedico-Hospitalares e o Gerenciamento da Manutencao: capacitacao a distancia. 1. ed.Brasılia,DF: Editora MS, 2002. (Serie F. Comunicacao e Educacao em Saude). ISBN85-334-0556-1.
SANTOS, N. M. dos. ESTUDO E APLICACAO DE MODELOS PARA IDENTIFICA-CAO DA DINAMICA DAS MALHAS DE TEMPERATURA E UMIDADE DE UMAINCUBADORA NEONATAL. Dissertacao — Universidade Federal do Ceara, Fortaleza,(CE), Outubro 2010.
SENSIRION. Datasheet SHT1x (SHT10, SHT11, SHT15) Hu-midity and Temperature Sensor. may 2010. Acessado emhttp://www.sensirion.com/fileadmin/user upload/customers/sensirion/Dokumente/Humidity/Sensirion Humidity SHT1x Datasheet V5.pdf.
SENSIRION. Datasheet SHT7x (SHT71, SHT75) Humidity and Temperature Sensor.may 2010. Retrieved in http://www.sensirion.com/en/pdf/product information/Datasheet-humidity-sensor-SHT7x.pdf.
SOCIETY, I. C. IEEE Standard 802.15.4d-2009. Abril 2009. Internet.
ZERMANI, M.; FEKI, E.; MAMI, A. Application of genetic algorithms in identificationand control of a new system humidification inside a newborn incubator. In:Communications, Computing and Control Applications (CCCA), 2011 InternationalConference on. [S.l.: s.n.], 2011. p. 1 –6.
ZERMANI, M. A.; FEKI, E.; MAMI, A. Application of adaptive predictive control toa newborn incubator. American J. of Engineering and Applied Sciences, v. 4, n. 2, p.235–243, 2011.





























