Embed Size (px)
Citation preview

Universidad de Pamplona
Departamento de Fısica y Geologıa
Laboratorios
GuiasEditadas y organizadas por:
Luis Joaquin Mendoza HerreraCon la colaboracion de:Fanny Mojica Sepulveda
Sede Villa del Rosario
Laboratorio de Mecanica
Cucuta-6 de noviembre de 2010

1
INTRODUCCION
El presente conjunto de practicas esta basado en el curso teorico de Mecanica, ydescribe las practicas fundamentales que deben realizarse en la mecanica, ajuste dedatos, que esta enfocada a la determinacion de constantes en fısica, suma y composicionde vectores, en la cual se estudia la suma de vectores(fuerzas), torque de una fuerza, endonde se estudia el equilibrio de los cuerpos rotacion y traslacion, velocidad media, encuya practica se analiza la diferencia entre la velocidad media y la velocidad instantanea, movimiento parabolico, donde se estudia la distancia horizontal y vertical recorridapor un cuerpo que es lanzado con una velocidad inicial en el plano, movimiento de caıdalibre, donde se calcula la aceleracion de la gravedad que es muy utilizada en la fısica,ley de Hooke, que se utiliza para calcular la constante de elasticidad de un resorte o deun conjunto de resortes agrupados en serie o en paralelo, segunda ley de Newton, en lacual se comprueba la relacion entre la fuerza aplicada a un cuerpo y la aceleracion delmismo, dinamica de un cuerpo rıgido y conservacion del momentun y de la energıa

2
CREDITOS DE LAS PRACTICAS
Este documento comprende el conjunto de practicas de la materia Laboratorio deMecanica que se imparte en la Universidad de Pamplona sede Villa del Rosario, yconforman en total 12 practicas a realizar en el trascurso de un semestre.
La practica correspondiente al ajuste de datos fue tomada de la practica originalrealizado por el profesor Alberto Patino, a la cual se le realizaron ajustes y se leanadieron las secciones correspondientes a como se debe realizar el ajuste con lasherramientas (Calculadora y Matlab), para que el estudiante posee diferente enfoquesde calculo para el ajuste de datos.
Las practicas Vectores, Fuerzas paralelas y Velocidad media fueron tomadas deldocumento realizado en pamplona por los docentes del departamento de Fısica, a estaspracticas se les realizaron algunos ajustes para que coincidieran con los equipos que seposeen en la sede de Villa del rosarios de la Universidad de Pamplona.
Las demas practicas(Caıda libre, movimiento parabolico, ley de Hooke, Segunda leyde Newton, Conservacion de la energıa, conservacion del momentum en una colisionelastica y determinacion del coeficiente de restitucion, pendulo balıstico y dinamicade un cuerpo rıgido) estan basadas en los manuales de los equipos adquiridos por laUniversidad de Pamplona a PHYWE, correspondientes a laboratorios de Fısica

3
Indice de Practicas
1. AJUSTE DE CURVAS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2. VECTORES. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3. FUERZAS PARALELAS. . . . . . . . . . . . . . . . . . . . . . . . . . 22
4. VELOCIDADMEDIA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5. CAIDA LIBRE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6. MOVIMIENTO PARABOLICO. . . . . . . . . . . . . . . . . . . . . . . 40
7. LEY DE HOOKE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
8. SEGUNDA LEY DE NEWTON. . . . . . . . . . . . . . . . . . . . . . 54
9. CONSERVACION DE LA ENERGIA. . . . . . . . . . . . . . . . . . . 60
10. DINAMICA DE UN CUERPO RIGIDO. . . . . . . . . . . . . . . 65
11. PENDULO BALISTICO. . . . . . . . . . . . . . . . . . . . . . . . 79
12. CONSERVACION DEL MOMENTUM. . . . . . . . . . . . . . . . . 86

5
Guía Unificada de Laboratorios
Código
Páginas 1 de 9
FLA -23 v.00
1. Titulo:
Analisis grafico de datos
2. Objetivos:
Representar graficamente datos experimentales.
Ajustar curvas a datos experimentales.
Establecer un criterio para el analisis de graficas de datos experimentales deacuerdo a la curva obtenida.
3. Marco Teorico:
En el estudio de los fenomenos fısicos se deben medir diferentes constantes, comopor ejemplo la gravedad en una ubicacion especifica, el momento de inercia deun cuerpo solido, la relacion entre la carga y la masa de un electron, entre otros.Un metodo de medida de estas constantes consiste en medir ciertas variables, encuya relacion se encuentra la constante a calcular y con estos datos determinarla constante deseada, en este caso se deben ajustar los datos obtenidos paracalcular dicha constante. Uno de los metodos para ajustar estos datos y calcular laconstante deseada es el metodo de mınimos cuadrados, el cual consiste en ajustarlos valores a la relacion entre las variables generando con ello el menor errorcuadratico posible.
Para ilustrar el metodo supongamos que un cuerpo se mueve con velocidadconstante v y parte desde una posicion inicial x0, en dicho experimento se realizanmedidas de la posicion del objeto en funcion del tiempo y se obtienen los siguientesdatos.
t(s) 0.5 1.0 1.5 2.0 2.5 3.0x(m) 2.4 3.6 4.8 5.2 6.5 7.9
Tabla 3.1: Objeto con velocidad constante
La ecuacion que relaciona las variables es:
x = vt+ x0 (3.1)

6
Guía Unificada de Laboratorios
Código
Páginas 2 de 9
FLA -23 v.00
en este caso las constantes de la ecuacion son la posicion inicial x0 y la velocidaddel objeto v y las variables son el tiempo t, el cual es la variable independiente yla posicion x que es la variable dependiente, como se puede observar esta ecuaciones similar a la ecuacion de una lınea recta, la cual tiene la forma:
y = mx+ b, (3.2)
donde por comparacion directa x0 = b, v = m, x = y y t = x, es decir que lanueva tabla de resultados es:
x 0.5 1.0 1.5 2.0 2.5 3.0y 2.4 3.6 4.8 5.2 6.5 7.9
Tabla 3.2: Objeto con velocidad constante
Con las parejas de valores de x y y, (xi, yi), se pueden calcular las constantesm y b, para generar el menor error cuadratico posible, utilizando las siguientesexpresiones:
m =N∑N
i=1 xiyi −∑N
i=1 xi∑N
i=1 yi
N∑N
i=1 x2i −
(∑Ni=1 xi
)2 , b =
∑Ni=1 x
2i
∑Ni=1 yi −
∑Ni=1 xi
∑Ni=1 xiyi
N∑N
i=1 x2i −
(∑Ni=1 xi
)2 ,
(3.3)
donde N es el numero de mediciones tomadas, en este caso N = 6, ademas
6∑i=1
xi = 0,5 + 1,0 + 1,5 + 2,0 + 2,5 + 3,0 = 10,5 (3.4)
6∑i=1
yi = 2,4 + 3,6 + 4,8 + 5,2 + 6,5 + 7,9 = 30,4
6∑i=1
xiyi = 0,5 ∗ 2,4 + 1,0 ∗ 3,6 + 1,5 ∗ 4,8 + 2,0 ∗ 5,2 + 2,5 ∗ 6,5 + 3,0 ∗ 7,9 = 62,35
6∑i=1
x2i = (0,5)2 + (1,0)2 + (1,5)2 + (2,0)2 + (2,5)2 + (3,0)2 = 22,75

7
Guía Unificada de Laboratorios
Código
Páginas 3 de 9
FLA -23 v.00
Al remplazar estos valores en la ecuacion 3.3, se obtiene
m =6 ∗ 62,35− 10,5 ∗ 30,4
6 ∗ 22,75− (10,5)2 = 2,09 y b =22,75 ∗ 30,4− 10,5 ∗ 30,4
6 ∗ 22,75− (10,5)2 = 1,4
Es decir que el valor que mas se ajusta a la velocidad es v = m = 2,09m/s yel valor que mas se ajusta a la posicion inicial es x0 = b = 1,4m, con lo que laecuacion que describe la posicion del objeto es x = 2,09t+ 1,4m.
Estas ecuaciones que permiten calcular m y b se encuentran en la memoria dela mayor parte de las calculadores cientıficas, como por ejemplo en la CASIOfx-82MS. Para el ejemplo anterior los pasos para obtener m y b son:
1 Limpiar la memoria de la calculadora.
2 Oprimir la tecla MODE de la calculadora, donde apareceran varias opcionesde las cuales se debe seleccionar el numero correspondiente a la opcion REG,que quiere decir regresion. Al seleccionar la opcion Reg, le apareceran variasopciones de las cuales se debe seleccionar la opcion Lin, que quiere decirlineal, al seleccionar esta opcion la calculadora ya se encuentra en el modoregresion lineal lista para ingresar los datos.
3 Ingrese los datos. Para ingresar los datos ingrese el primer valor de x, seguidode la tecla marcada con una coma en su calculadora (,) y luego el primervalor de y.
4 Presione la tecla M+ de su calculadora. Si al oprimir esta tecla su calculadoramuestra en la pantalla n = 1, usted realizo el procedimiento correctamente.
5 Repita los pasos 3 y 4 para todos los datos al finalizar en este caso leaparecera n = 6.
6 Para buscar los resultados de m y b debe oprimir la tecla shift, seguidade la tecla S-VAR, donde le apareceran varias opciones de la que se debeseleccionar B para obtener m y A para obtener b.
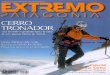
En el caso del programa Matlab esta regresion con su respectiva grafica sepueden realizar con el codigo que se muestra en la Figura3.1 y el resultado esm, b = 2,0914 1,4067 y la grafica ilustrada en la Figura3.2
Existen variables que se relacionan por una sola constante como es el caso dela deformacion x de un resorte producida por la aplicacion de una fuerza F , las
8
Guía Unificada de Laboratorios
Código
Páginas 4 de 9
FLA -23 v.00
Figura 3.1: Codigo para determinar la regresion lineal y grafica
Figura 3.2: Grafica de la regresion lineal
cuales estan relacionadas por la ley de Hooke F = kx, donde k es la constantede elasticidad del resorte al cual se le aplica la fuerza. En un experimento deesta naturaleza se obtuvieron las siguientes medidas:
Como se puede notar en este caso la ecuacion que relaciona las variables es de la

9
Guía Unificada de Laboratorios
Código
Páginas 5 de 9
FLA -23 v.00
x(cm) 0 1.0 2.0 3.0 4.0 5.0F (N) 0 0.52 1.10 1.60 1.90 2.70
Tabla 3.3: Deformacion de un resorte
forma y = mx, es decir en este caso el corte con el eje y es cero, la ecuacion 3.3,para m en este caso es de la forma:
m =
∑Ni=1 xiyi∑Ni=1 x
2i
. (3.5)
Para este caso tenemos F = y, x = x y k = m, donde la pendiente esta dada por:
m =
∑6i=1 xiyi∑6i=1 x
2i
=0 ∗ 0 + 1 ∗ 0,52 + 2 ∗ 1,1 + 3 ∗ 1,6 + 4 ∗ 1,9 + 5 ∗ 2,7
02 + 0,522 + 1,12 + 1,62 + 1,92 + 2,72= 0,52,
(3.6)
es decir que la constante de elasticidad del resorte es k = 0,52N/cm, y la ecuaciondel resorte es F = 0,52xN/cm
Existen otras ecuaciones que aunque no poseen la forma estandar de una lınease pueden convertir en una lınea, con algunas sustituciones, este es el caso delcrecimiento de una poblacion (ejemplo de moscas), cuyo crecimiento esta dadopor la ecuacion P = P0e
kt, donde t es el tiempo en dıas, P es la poblacion ennumero de moscas, P0 y k son constantes a determinar, las cuales corresponden ala poblacion inicial y la tasa de crecimiento de las moscas, las medidas realizadasal crecimiento de las moscas se resume en la Tabla3:
t(h) 0 3.0 6.0 9.0 12 15 18 21 24 27 30P (No de moscas ) 25 31 36 41 47 52 62 71 82 94 108
Tabla 3.4: Crecimiento de moscas
Para convertir la ecuacion del crecimiento de las moscas en una ecuacion lineal leaplicamos el logaritmo natural a ambos lados de la ecuacion obteniendo
lnP = kt+ lnP0 (3.7)

10
Guía Unificada de Laboratorios
Código
Páginas 6 de 9
FLA -23 v.00
Comparando la ecuacion 3.7, con la ecuacion de una lınea recta 3.2, son igualescuando:
y = lnP, x = t, ,m = k, , b = lnP0 (3.8)
con lo cual la nueva Tabla de valores se convierte en
x 0 3.0 6.0 9.0 12 15 18 21 24 27 30y 3.29 3.43 3.58 3.71 3.85 3.95 4.13 4.26 4.41 4.54 4.68
Tabla 3.5: Ajuste del crecimiento de moscas
Los valores de m y b son 0.0473 y 3.2704 respectivamente, reemplazando estosvalores en 3.8, obtenemos P0 = 26,32 y k = 0,0473, con estos valores la ecuacionpara el crecimiento de las moscas esta dado por P = 26,32e0,0473t, la grafica delos valores experimentales y los valores aproximados se muestra en la Figura3.3
Figura 3.3: Grafica de la regresion lineal
11
Guía Unificada de Laboratorios
Código
Páginas 7 de 9
FLA -23 v.00
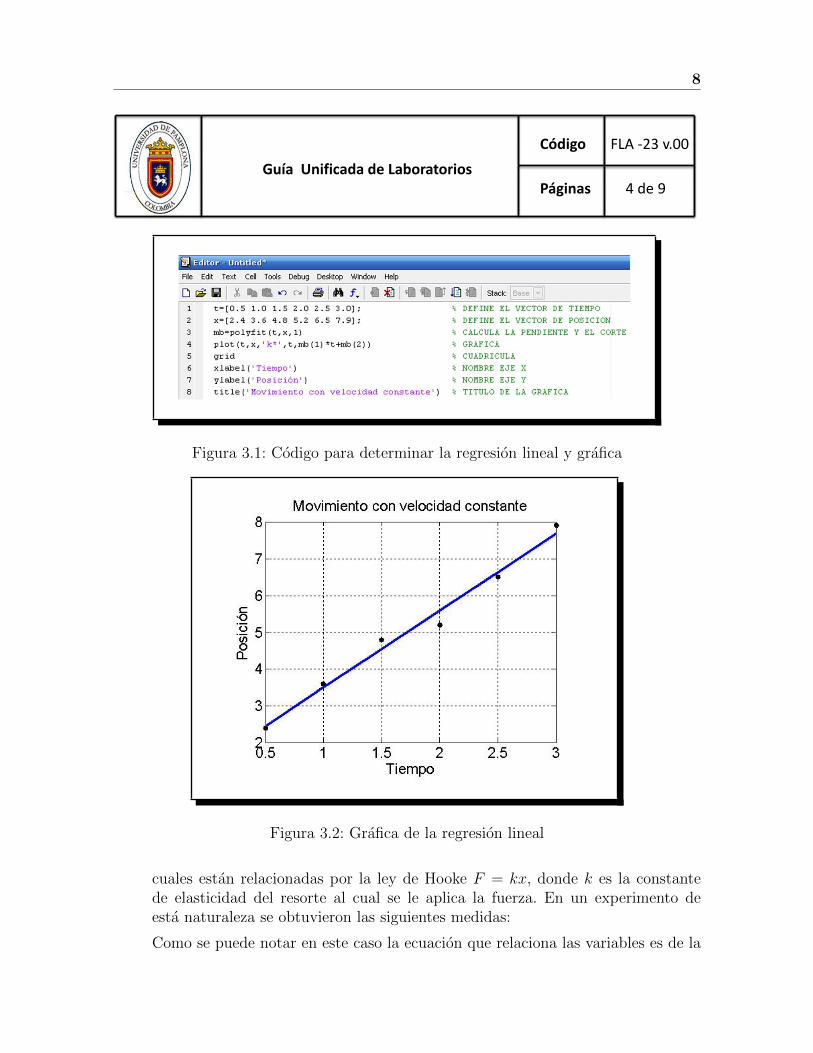
Si en un momento dado se pregunta cual es el numero de moscas en un tiempode 5 dıas este valor corresponde a P (5) = 26,32ee0,0473∗5 = 33 moscas.
Como siguiente explicacion suponga que se tienen datos de la distancia entre doscargas iguales de valor q y la fuerza F de repulsion entre ellas, en este caso laecuacion que relaciona estas variables es la ley de Coulomb definida por F = ke
q2
r2,
donde ke es la constante electrica, en este caso la sustitucion que se debe realizarpara linealizar la ecuacion es y = F , x = 1
r2y m = keq
2
4. Materiales, equipos e insumos:
Equipos
1.Computador
1.Calculadora
Materiales
Sofware-Matlab
5. Procedimiento
1 En cierto movimiento de un cuerpo bajo la accion de una fuerza, eldesplazamiento x y el tiempo t se dan en la siguiente tabla.
t(s) 1 2 3 4 5 6x(m) 4.1 10.0 17.9 28.2 40.0 53.8
Tabla 3.6: Ejercicio 1
1) Dibujar la grafica de x en funcion de t.
2) Se sabe que la ecuacion de este movimiento se da por x = 12at2 + y0.
Deducir las constantes a y y0.
3) Encuentre cuanto habra recorrido el objeto al cabo de un minuto.
2 Se aplica una fuerza constante F a un carrito de masa m y se mide suaceleracion a del movimiento producido. Se repite el procedimiento paraotros valores de masa manteniendo siempre la misma fuerza. Los resultadosse consignan en la siguiente tabla.
1) Dibujar la grafica a en funcion de m.
2) Se sabe que F = ma. Deducir la constante F .

12
Guía Unificada de Laboratorios
Código
Páginas 8 de 9
FLA -23 v.00
m(Kg) 1 2 3 4 5 6a(m/s2) 24.3 13.17 8.25 6.30 4.90 4.25
Tabla 3.7: Ejercicio 2
3) Encuentre la aceleracion cuando la masa del carrito es de 100Kg.
3 El ritmo al cual las moleculas de agua pasan por osmosis a traves de unamembrana semipermeable desde un recipiente de agua pura a otro con unadisolucion de azucar puede medirse utilizando el marcado radiactivo dealgunas de las moleculas de agua. El ritmo r a que se mueven las moleculasde agua a traves de la membrana viene dado en funcion del tiempo t en lasiguiente tabla:
r(unidades arbitrarias) 100 59 38 25 17 11 7 4a(m/s2) 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
Tabla 3.8: Ejercicio 3
1) Represente los resultados en una grafica.
2) Admitiendo que la curva sigue una relacion de la forma r = r0e−λt,
determine por el metodo de mınimos cuadrados los valores de λ y r0 .
3) A que ritmo se moverıan las moleculas de agua por la membrana enestudio al cabo de 10h.
a) ¿que sustituciones se deben realizar en uno de los siguientes casos, paralinealizar las ecuaciones?
1) La velocidad de flujo de salida de un fluido ideal por un orificio en el lado
de un tanque esta dada por: v =√
2Pρ
. Donde v y P son las variables
medidas.
2) La ley de los gases para un gas ideal es PV = RT . Donde P y V sonvariables medidas.
3) Las longitudes de onda de las lıneas en la serie de Balmer del espectro dehidrogeno estan dadas por 1
λ= R
(14− 1
n2
). Donde λ y n son variables
medidas.
4) La frecuencia de resonancia de un circuito LC en paralelo esta dada porω = 1√
LC. Donde w y C son variables conocidas.

13
Guía Unificada de Laboratorios
Código
Páginas 9 de 9
FLA -23 v.00
5) La impedancia de un circuito RC en serie es Z =√R2 + 1
ω2C2 . Donde
Z y ω son variables medidas.
6) La variacion relativista de la masa con la velocidad es m = m0√1− v2
c2
.
Donde m y v son variables medidas.
6. Nivel de riego
Nivel 1 (Bajo)

14
Guía Unificada de Laboratorios
Código
Páginas 1 de 8
FLA -23 v.00
1. Titulo:
Vectores
2. Objetivos:
Disenar y construir un sistema para comprender el analisis de vectores.
Verificar experimentalmente las condiciones de equilibrio para un sistema devectores.
Verificar que los vectores (fuerzas) cumplen la definicion de la adicion devectores.
Encontrar fuerzas resultantes de vectores y determinar experimentalmentelas componentes de uno o varios vectores.
3. Marco Teorico:
Muchas cantidades fısicas, como la velocidad, la aceleracion, la fuerza, entre otrasson cantidades vectoriales, por tal motivo se debe tener claridad en la notacion yrepresentacion que vamos utilizada para los mismos.
Suma de Vectores.
Sean ~F1 y ~F2 dos vectores que representan dos fuerzas. La suma de estos dosvectores fuerza ~F = ~F1 + ~F2 se puede obtener segun se ilustra en el triangulode la Figura 3.4.a, dibujando un vector a continuacion del otro, o bien en elparalelogramo de la Figura 3.4.b graficandolos en un origen comun .
Para determinar la magnitud del vector suma de los vectores ~F1 y el vector ~F2
aplicamos la Ley del coseno
F =√F 2
1 + F 22 + 2F1F2 cos (θ) (3.9)
donde θ, es el angulo entre los vectores ~F1 y ~F2.
Si F1 y F2 son fuerzas que actuan sobre un cuerpo, ~F sera la fuerza resultanteque actua sobre el cuerpo. La fuerza que equilibre a esta fuerza resultante se lellamara es ~Fe, la cual tiene la misma magnitud que que la fuerza resultante peroen sentido opuesto, es decir ~Fe = −~F , tal y como se muestra en la Figura 3.5.

15
Guía Unificada de Laboratorios
Código
Páginas 2 de 8
FLA -23 v.00
Figura 3.4: Metodos para la suma de vectores
Descomposicion de Vectores.
Cualquier vector ~F , puede expresarse como la suma de dos (o mas) vectores. Este
conjunto de vectores que al sumarse producen ~F , se les llama la componentes delvector ~F . Las coordenadas mas utilizadas para expresar las componentes de unvector son las rectangulares, esto es, el vector se expresa como la suma de dos otres vectores mutuamente perpendiculares, como se muestra en la Figura 3.6.
El vector ~F en coordenadas rectangulares, puede expresarse como ~F = ~Fx + ~Fy,
donde ~Fx = Fx~ux y ~Fy = Fy~uy, son las componentes del vector ~F en las direcciones~ux y ~uy respectivamente, con Fx = F cosα y Fy = Fsenα, en consecuencia
~F = F cosα~ux + Fsenα~uy tanα = Fy/Fx (3.10)
Este resultado se puede generalizar para encontrar el vector resultante de lasuma de muchos vectores, en cuyo caso es muy extenso utilizar el trianguloo el paralelogramo, para este caso la suma de los vectores se define como

16
Guía Unificada de Laboratorios
Código
Páginas 3 de 8
FLA -23 v.00
Figura 3.5: Fuerza equivalente de dos vectores
~F = ~F1 + ~F2 + · · · , por lo que es conveniente utilizar el metodo de componentesrectangulares, de esto resulta
Fx = F1x + F2x + · · · =n∑i=1
Fix =n∑i=1
Fi cosαi (3.11)
Fy = F1y + F2y + · · · =n∑i=1
Fiy =n∑i=1
Fisenαi (3.12)
Donde n es el numero de vectores a sumar, αi es el angulo que el vector ~Fi hacecon el semieje positivo X y Fi cosαi y Fisenαi son las componentes de ~Fi a lolargo de los ejes X e Y.
4. Materiales, equipos e insumos:
Materiales
1 Mesa de fuerzas

17
Guía Unificada de Laboratorios
Código
Páginas 4 de 8
FLA -23 v.00
Figura 3.6: Componentes rectangulares de un vector
3 Poleas
3 Tornillos
3 Hilos
1 Aro central
21 Pesas(5,10,20 y 50 g)
3 ganchos de 50 g
5. Procedimiento
Montaje Experimental I: Suma de Vectores.
1 Realice el montaje de poleas y masas como se observa en la Figura 3.7, paraello desplace la polea 1 un angulo θ1 entre 0 y 90 grados segun el goniometrode la mesa y regıstrelo en la Tabla 3.9, como θ1 y sobre el porta pesas quepasa sobre ella coloque una masa entre 0 y 150 g, registre la masa colocadaen la Tabla 3.9 como m1.

18
Guía Unificada de Laboratorios
Código
Páginas 5 de 8
FLA -23 v.00
Figura 3.7: Montaje para el estudio de los vectores
2 Desplace la polea 2 un angulo entre 90 y 180 grados segun el goniometro dela mesa y regıstrelo en la Tabla 3.9, como θ2 y en el porta pesas que pasasobre esta polea coloque masa entre 0 y 150 g, registre la masa colocada enla Tabla 3.9 como m2.
3 Ahora coloque un valor de masa en el porta pesas que pasa sobre la polea 3 ygire la polea 3 hasta lograr el equilibrio del sistema (el anillo quede centradocon el circulo dibujado sobre la mesa), en caso de no lograr obtener equilibriocambie la masa colocada sobre el porta pesas 3 y repita el procedimiento; allograr el equilibrio, registre la masa del porta pesas 3 como me en la Tabla3.9, esta es la masa equilibrante. Tome el valor del angulo que senala la polea3 y regıstrelo en la Tabla de datos 1 como θe este es el angulo equilibrante.
Montaje Experimental II: Composicion de Vectores.
1 Coloque la polea 1 a 0 grados y sobre el porta pesas coloque una masa entre0 y 150 gr, registre los datos en la Tabla 3.10, como θ1 y m1, respectivamente.

19
Guía Unificada de Laboratorios
Código
Páginas 6 de 8
FLA -23 v.00
2 Coloque la polea 2 a un angulo de 90 grados y sobre el porta pesas coloqueuna masa entre 0 y 150 gr, registre los datos en la Tabla 3.10, como θ2 y m2,respectivamente.
3 Coloque una masa sobre el porta pesas 3 y ajuste la polea 3 hasta que seequilibre el anillo con el cırculo dibujado sobre la mesa. Cuando se logre elequilibrio registre la masa del porta pesas 3 en la Tabla 3.10 como me yregistre el angulo de la polea 3 segun el goniometro de la mesa, en la Tabla3.10 como θe.
1 Convierta a kilogramos las masasm1,m2 yme registre estos datos en segundacolumna de la Tabla 3.9.
2 A cada uno de los datos de masas anterior, multiplıquelos por el valor de lagravedad g = 9,8m/s2, para encontrar las fuerzas F1, F2 y Fe respectivamentey registre sus resultados en la tercera columna de la Tabla 3.9.
3 Obtenga la magnitud de la fuerza resultante de las dos fuerzas la cual es iguala la magnitud de la fuerza equilibrante, registre el valor de de esta fuerzacomo Fr en la Tabla 3.9.
4 Obtenga la direccion de la fuerza resultante de las dos fuerzas, recuerdeque la direccion de esta fuerza es 180o menor que la direccion de la fuerzaequilibrante, registre la direccion de esta fuerza como θr en la Tabla 3.9.
5 Los valores demr, son iguales a los valores deme, debido a que las magnitudesde las fuerzas equilibrante y resultante son iguales.
6 En una hoja de papel milimetrado, grafique las fuerzas ~F1 y ~F2 de la Tabla3.9, escogiendo para ello un escala adecuada, de tal forma que se puedanobservar en forma clara y permita realizar la suma de estas fuerzas porcualquier metodo grafico (metodo del paralelogramo, metodo del triangulo,etc). Mida la magnitud y la direccion de la fuerza resultante encontradamediante este metodo y guardelos como Frteorico1 y θrteorico1.
7 Tome las magnitudes de las fuerzas F1 y F2, y mediante el metodo analıticoencuentre sus componentes rectangulares. Luego sumelas y encuentre lamagnitud y direccion de la fuerza, utilizando la ecuacion 3.10, guarde estosvalores como Frteorico2 y θrteorico2.
8 Calcule el error existente entre los valores experimentales de la magnitud dela fuerza resultante Fr y los valores teoricos Frteorico1 y Frteorico2.

20
Guía Unificada de Laboratorios
Código
Páginas 7 de 8
FLA -23 v.00
9 Calcule el error existente entre los valores experimentales de la direccion dela fuerza resultante θr y los valores teoricos θrteorico1 y θrteorico2.
10 Repita los item 1 al 5 para la Tabla 3.10, hasta obtener la fuerza resultantey su respectiva direccion
11 Calcule las componentes rectangulares del vector de fuerza del numeralanterior por el metodo analıtico.
12 Calcule el error existente entre los valores experimentales y teoricos de lascomponentes rectangulares.
6. Nivel de riego
Nivel 1 (Bajo)
7. Anexos
Cuestionario
1 ¿Que es un vector y cual es su diferencia con un escalar?
2 ¿Que operaciones se pueden realizar con escalares que con los vectores no sepueden realizar?
3 ¿Explique tres formas diferentes de indicar la direccion de un vector?
4 ¿Existen otros tipos de coordenadas? ¿Cuales?
Masa m(g) Masa m(Kg)Fuerza=mg Angulo
s Newtons Gradosm1 m1 F1 θ1
m2 m2 F2 θ2
me me Fe θemr mr Fr θr
Tabla 3.9: Suma de vectores
Preguntas de control
1 ¿Coinciden los valores experimentales y teoricos de la resultante de la sumade dos vectores?.

21
Guía Unificada de Laboratorios
Código
Páginas 8 de 8
FLA -23 v.00
Masa m(g) Masa m(Kg)Fuerza=mg Angulo
s Newtons Gradosm1 m1 F1 θ1
m2 m2 F2 θ2
mr mr Fr θrme me Fe θe
Tabla 3.10: Composicion de vectores
2 ¿Calculando la fuerza equilibrante se puede calcular la fuerza resultante dedos vectores?¿Como?.
3 ¿Como se pueden obtener experimentalmente las componentes rectangularesde un vector dado?.

22
Guía Unificada de Laboratorios
Código
Páginas 1 de 6
FLA -23 v.00
1. Titulo:
Balanza de fuerzas paralelas
2. Objetivos:
Comprender las condiciones de equilibrio de traslacion y de rotacionmediante la balanza de fuerzas paralelas.
Afianzar el concepto de torque alrededor de un eje fijo.
Establecer si bajo la accion simultanea de varias fuerzas en diferentesposiciones con respecto al eje de rotacion de la balanza, esta se encuentra ono en equilibrio.
3. Marco Teorico
ESTATICA:
La estatica estudia los cuerpos que estan en equilibrio, que es el estado de uncuerpo no sometido a aceleracion; un cuerpo, que esta en reposo, o estatico, sehalla por lo tanto en equilibrio.
Un cuerpo en equilibrio estatico, si no se le perturba, no sufre aceleracion detraslacion o de rotacion, porque la suma de todas las fuerzas o la suma de todoslos momentos que actuan sobre el son cero. Sin embargo, si el cuerpo se desplazaligeramente, son posibles tres resultados:
El objeto regresa a su posicion original, en cuyo caso se dice que esta enequilibrio estable. Por ejemplo, pelota colgada libremente de un hiloesta en equilibrio estable porque si se desplaza hacia un lado, rapidamenteregresara a su posicion inicial.
El objeto se aparta mas de su posicion, en cuyo caso se dice que esta enequilibrio inestable. Por ejemplo, un lapiz parado sobre su punta esta enequilibrio inestable; si su centro de gravedad esta directamente arriba desu punta la fuerza y el momento netos sobre el seran cero, pero si sedesplaza aunque sea un poco, digamos por alguna corriente de aire o unavibracion, habra un momento sobre el y continuara cayendo en direccion deldesplazamiento original.

23
Guía Unificada de Laboratorios
Código
Páginas 2 de 6
FLA -23 v.00
El objeto permanece en su nueva posicion, en cuyo caso se dice que esta enequilibrio neutro o indiferente. Por ejemplo, una esfera que descansa sobreuna mesa horizontal; si se desplaza ligeramente hacia un lado permanecera ensu posicion nueva.
Condiciones de Equilibrio:
a) Condicion de equilibrio o Condicion de equilibrio Traslacional.“La suma algebraica de fuerzas que actuan sobre un cuerpo debe ser iguala cero”. Cuando esta condicion se satisface no hay fuerza desequilibrada ono balanceada actuando sobre el cuerpo, lo que implica que el sistema defuerzas no tendera a producir ningun cambio en el movimiento lineal de uncuerpo.
b) Condicion de equilibrio o Condicion de equilibrio Rotacional.“La sumatoria algebraica de los momentos provocados por fuerzas queactuan a determinada distancia de cualquier eje o punto centro de giro dereferencia debe ser cero”. Cuando esta condicion se satisface no hay torqueno balanceado o momento actuando sobre el cuerpo, lo que implica que elcuerpo no tendera girar o rotar.
Si ambas condiciones se cumplen se dice entonces que un cuerpo se encuentra enequilibrio, es decir, no tiene movimiento traslacional ni rotacional.
TORQUE O MOMENTO DE FUERZA
Se define el torque o momento ~τ de una fuerza ~F que actua sobre algun punto delcuerpo rigido, en una posicion ~r respecto de cualquier origen O, por el que puedepasar un eje sobre el cual se produce la rotacion del cuerpo rıgido, al productovectorial entre la posicion ~r y la fuerza ~F
~τ = ~r × ~F (3.13)
El torque es la magnitud vectorial, si θ es el angulo entre ~r y ~F , su magnitudpor definicion del producto vectorial, es τ = rFsenθ, mientras que su direcciones siempre perpendicular al plano de los vectores ~r y ~F .

24
Guía Unificada de Laboratorios
Código
Páginas 3 de 6
FLA -23 v.00
Generalmente se considera un toque positivo cuando tiende a producir rotacion ensentido contrario a las manecillas del reloj y negativo en sentido de las manecillasdel reloj.
UNIDADES DE TORQUE
Para el sistema internacional:
M.K.S.⇒metro·Newton= N ·mC.G.S.⇒centımetro·dinas= d · cm
4. Materiales, equipos e insumos:
Materiales
1 Pasador de sujecion + 2 tornillos
1 Balanza de fuerzas paralelas
9 Pesas de 10g-1kg
5. Procedimiento
1 Realice el montaje de la Figura 3.8. Asegurese que la balanza gire librementesobre su eje de rotacion. La balanza debe quedar alineada horizontalmente.
2 Coloque una masa entre 200 y 400 g en la tercera posicion del lado izquierdode la balanza. Registre este valor como Mi en Kg en la Tabla 3.11.
3 Coloque masas del lado derecho de la balanza en diferentes posiciones hastaque se equilibre horizontalmente. Registre el valor de las masas con las cualesse logro el equilibrio en la Tabla 3.11.
4 Realice un diagrama de la balanza colocando el sistema de referencia en elpunto de la rotacion de la misma y ubique las fuerzas y sus respectivos radiosen forma vectorial.
5 Coloque dos masas entre 100 y 200 g en la segunda y tercera posicion delado izquierdo de la balanza. Registre estos valores en Kg en la Tabla 3.12.
6 Coloque masas del lado derecho de la balanza en diferentes posiciones hastaque se equilibre horizontalmente. Registre el valor de las masas con las cualesse logro el equilibrio como Mi1 y Mi2 en la Tabla 3.12.

25
Guía Unificada de Laboratorios
Código
Páginas 4 de 6
FLA -23 v.00
1 Realice un diagrama de la balanza colocando el sistema de referencia en elpunto de la rotacion de la misma y ubique las fuerzas y sus respectivos radiosen forma vectorial.
2 Calcule la magnitud de cada una de las fuerzas que actua sobre la balanza.Recuerde que el peso ~W es una fuerza y se calcula como ~W = m~g. Registreestos valores en la Tabla 3.11.
3 Tome como d la distancia entre las diferentes posiciones como se observa enla Figura.
a) Calcule los torques ~τ en funcion de la distancia d, efectuados por cada unode estas fuerzas mediante la ecuacion y regıstrelas en la Tabla 3.11.
4 Sume los torques que actuan sobre la balanza, teniendo en cuenta el signode cada uno de ellos y compruebe la condicion de equilibrio rotacional.
5 Realice un diagrama de la balanza colocando el sistema de referencia en elpunto de la rotacion de la misma y ubique las fuerzas y sus respectivos radiosen forma vectorial.
6 Calcule la magnitud de cada una de las fuerzas que actua sobre la balanza.Recuerde que el peso ~W es una fuerza y se calcula como ~W = m~g. Registreestos valores en la Tabla 3.12.
7 Tome como d la distancia entre las diferentes posiciones como se observa enla Figura 3.8.
b) Calcule los torques ~τ en funcion de la distancia d, efectuados por cada unode estas fuerzas mediante la ecuacion y regıstrelas en la Tabla 3.12.
8 Sume los torques que actuan sobre la balanza, teniendo en cuenta el signode cada uno de ellos y compruebe la condicion de equilibrio rotacional.
6. Nivel de riego
Nivel 1 (Bajo)
7. Anexos
Cuestionario
a) ¿Como se realiza el producto vectorial entre dos vectores?
b) ¿Como se reduce un grupo de fuerzas paralelas a una sola fuerza?

26
Guía Unificada de Laboratorios
Código
Páginas 5 de 6
FLA -23 v.00
Figura 3.8: Montaje para fuerzas paralelas
Preguntas de control
a) ¿Sera posible predecir la fuerza y su punto de aplicacion que logra el equilibriosi solamente se conoce la masa que ha sido colgadas en un lado de la balanza?.Sustente su respuesta.
b) ¿El montaje experimental usado en esta practica podrıa ser usado paraencontrar la masa de un cuerpo?. Explique.
c) ¿Se puede relacionar el funcionamiento de una balanza romana con el

27
Guía Unificada de Laboratorios
Código
Páginas 6 de 6
FLA -23 v.00
presente experimento?. Sustente su respuesta.
Masa Lado izquierdo Mi[Kg]Masas del Lado Derecho
M1[Kg] M2[Kg] M3Kg
Fuerza Lado izquierdo Fi = Mi · g[N ]Fuerzas del Lado Derecho
F1[N ] F2[N ] F3[N ]
Torque lado izquierdo τi = 3d · Fi · sen(90o)Torques del Lado Derecho
τ1[N ·m] τ2[N ·m] τ3[N ·m]
Sumatoria de torques del lado Derechoτ1 + τ2 + τ3 =
Tabla 3.11: Torque de fuerzas paralelas
Masas Lado izquierdo Masas del Lado DerechoMi1 Mi2 M1[Kg] M2[Kg] M3[Kg]
Fuerzas Lado izquierdo Fuerzas del Lado DerechoFi1 Fi2 F1[N ] F2[N ] F3[N ]
Torques Lado izquierdo Torques del Lado Derechoτi1 τi2 τ1[N ·m] τ2[N ·m] τ3[N ·m]
Sumatoria torques lado izquierdo Sumatoria torques lado izquierdoτi1 + τi2 τ1 + τ2 + τ3
Tabla 3.12: Torque de fuerzas paralelas

28
Guía Unificada de Laboratorios
Código
Páginas 1 de 6
FLA -23 v.00
1. Titulo:
Velocidad Media
2. Objetivos:
Entender el concepto de velocidad media e instantanea en formaexperimental y reportar estos resultados.
Definir la velocidad media e instantanea.
Utilizar herramientas de analisis grafico para conocer la interpretacion fısicade la practica.
3. Marco Teorico
Figura 3.9: Velocidad media

29
Guía Unificada de Laboratorios
Código
Páginas 2 de 6
FLA -23 v.00
Supongamos que en tiempo t1 un cuerpo se encuentra en la posicion A, mas tardeen el tiempo t2 se encuentra en la posicion B, como se muestra en la Figura 3.9.La velocidad media entre A y B se define por
V = ∆x/∆t, (3.14)
donde ∆x = x2−x1 es el desplazamiento de la partıcula y ∆t = t2−t1 es el tiempoempleado para el realizar este desplazamiento. Por consiguiente se define que, lavelocidad media durante un cierto intervalo de tiempo es igual al desplazamientopromedio por unidad de tiempo.
Para determinar la velocidad instantanea en un punto, tal como A, debemoshacer el intervalo de tiempo ∆t tan pequeno como sea posible, de modo que noocurran cambios es el estado de movimiento durante ese pequeno intervalo, esdecir, calcular el lımite de la fraccion que aparece en la ecuacion (3.14) cuando eldenominador ∆t tiende a cero, esto se escribe
V = lım∆t→0
V = lım∆t→0
∆x/∆t (3.15)
Esta es la definicion de derivada de x con respecto al tiempo, esto es
V =dx
dt(3.16)
Por tanto, la velocidad instantanea es la derivada del desplazamiento con respectoal tiempo.
4. Materiales, equipos e insumos:
Equipos
1. Carril de aire -banco de cojın neumatico 2m
1. Fuente aıre 115V/60Hz
1. Manguera de presion, long. 1,5m
Materiales
1. Carrito dinamico para el Carril de aire
2. Soporte final para Parachoques con 2 tornillos c/u

30
Guía Unificada de Laboratorios
Código
Páginas 3 de 6
FLA -23 v.00
2. Parachoques-horquilla
1. Cable conex.para el carril de aire
2. Banderola de 10 cm y 1cm (Soporte y placa con enchufe)
1. Medidor de tiempo
1. Adaptador para el Medidor de tiempo
2. Fotoceldas con base negra
2. Cables de conexion, para las fotoceldas
1. Cronometro digital, 24 h, 1/100s /1s
5. Procedimiento
Figura 3.10: Montaje para determinar la velocidad media
1 Coloque los parachoques elasticos en ambos extremos del riel como se observaen la Figura 3.9.
2 Conecte el compresor al toma de luz y enciendalo, en el nivel 4 o 5, intensidadque se tendra durante todo su experimento.
3 Coloque el carrito deslizador sobre el riel. Utilizando los tornillos niveladoresajuste la inclinacion del riel hasta que el carrito deslizador se mueva convelocidad constante (es decir siempre con la misma velocidad que no seincremente ni dismunuya).

31
Guía Unificada de Laboratorios
Código
Páginas 4 de 6
FLA -23 v.00
4 Ubique el centro del riel y registre el punto como x1 en un Diagramadel montaje de laboratorio. (POR FAVOR NO RAYE EL RIEL DEAIRE).
5 Ubique las dos fotoceladas a una distancia de 1m, la una de la otra, centradasen el punto medio x1. Colocando primero la fotocelda temporizadoraprincipal.
6 Disponga el medidor de tiempo, presionando en el SMART TIMER la tecla1 select measurement (tecla roja) active la opcion TIME, luego con latecla 2 seleccione Select Mode (tecla azul) active la opcion Two Gate,de esta forma se medira el tiempo que tarde en recorrer el deslizador ladistancia entre las dos fotoceldas, en este caso 1m. Realice varias pruebassoltando el carrito deslizador con la banderola de 10 cm para ver si funcionacorrectamente las fotoceldas temporizadoras.
7 Elija otro punto cerca del extremo superior del riel como el punto de partidapara el carrito deslizador, marquelo en el diagrama del montaje como x0.Mantengalo fijo durante toda la practica.
8 La distancia D es la que hay entre los centros de las fotoceldas, de acuerdoa lo indicado en el item 5.
9 Coloque el carrito deslizador con la banderola de 10cm cobre el carril de aire.
10 Mida el tiempo que le toma al deslizador pasar a traves de las fotoceldas (elmarcado por el medidor de tiempo).
11 Repita este procedimiento anterior cinco veces y registrelo en la Tabla 3.13.
12 Acerque las dos fotoceldas hacia el punto medio x1 5 cm cada una, aseguresede acercarlas la misma distancia. Repita el proceso de la toma de daos delpaso 3, y registre sus datos en la Tabla 3.13.
13 Continue disminuyendo la distancia de 5 cm en 5 cm, y repita la toma dedatos hasta que la distancia entre las dos fotoceldas sea de 20 cm.
14 Para la toma de datos de 10 cm se utiliza una sola fotocelda, la cual medira eltiempo que tarde en pasar la banderola de 10 cm por esta fotocelda, paralograr esto ubique la fotocelda principal en el punto medio x1 y cambie elmodo de operacion del SMART TIMER al modo GATE.
15 Ubique la banderola de 10 cm y mida el tiempo cinco veces y registre susdatos en la Tabla 3.14.

32
Guía Unificada de Laboratorios
Código
Páginas 5 de 6
FLA -23 v.00
16 Cambie la banderola por la de 1cm, mida el tiempo cinco veces y registresus datos en la Tabla 3.14.
17 Gire la banderola de 1cm para obtener una banderola de 1mm, mida eltiempo cinco veces y registre sus datos en la Tabla 3.14.
a) Calcule el promedio de cada una de las muestras de la Tabla 3.13
b) Calcule el promedio de cada una de las muestras de la Tabla 3.14
6. Nivel de riego
Nivel 1 (Bajo)
7. Anexos
Cuestionario
a) ¿Que diferencia existe entre velocidad media y velocidad instantanea?
Muestra D(m) t1 t2 t3 t4 t5 Promedio1 12 0.93 0.84 0.75 0.66 0.57 0.48 0.39 0.2
Tabla 3.13: Velocidad media
Muestra D(m) t1 t2 t3 t4 t5 Promedio1 0.12 0.013 0.001
Tabla 3.14: Velocidad media
Preguntas de control

33
Guía Unificada de Laboratorios
Código
Páginas 6 de 6
FLA -23 v.00
a) ¿Existe relacion entre los promedios de las muestras?, ¿Cual?.
b) ¿Realice una grafica donde represente la distancia D en funcion del tiempopromedio?.
c) ¿Calcule la pendiente de la grafica realizada en el numeral anterior?.
d) ¿Que significado fısico tiene la pendiente calculada en el numeral anterior?

34
Guía Unificada de Laboratorios
Código
Páginas 1 de 6
FLA -23 v.00
1. Titulo:
Caıda Libre
2. Objetivos
Estudiar el movimiento de caıda libre de un cuerpo.
Determinar la magnitud de la aceleracion gravitatoria terrestre al nivel deCiudad Universitaria
Determinar las funciones cinematicas en el movimiento de caıda libre.
Analizar los datos de posicion y tiempo y las graficas correspondientes.
3. Marco Teorico
El caso mas importante de movimiento uniformemente acelerado es el de caıdalibre, donde los cuerpos estan sometidos unicamente a la atraccion de la Tierra.Despreciando por tanto fuerzas como la friccion del aire, un cuerpo se muevecerca de la superficie terrestre con una aceleracion constante, donde esta es laaceleracion de la gravedad y esta dirigida verticalmente hacia abajo y tiene unvalor muy cercano a g = 9,8m/s2 . Este valor es el mismo para todos los cuerpos,y puede considerarse independiente de la altura, mientras que no nos alejemos dela superficie terrestre, ya que la aceleracion de la gravedad disminuye a medidaque la distancia sobre la superficie terrestre o bajo ella aumenta.
En un movimiento uniformemente acelerado la posicion de un cuerpo en cualquierinstante de tiempo bajo aceleracion constante es
y = y0 + v0 t+1
2at2 (3.17)
Ahora, si un cuerpo que cae bajo la accion de la gravedad y escogiendo la direccionverticalmente hacia arriba como negativa, definimos a = g y donde la velocidadinicial es cero, debido a que el cuerpo cae libremente, resulta
y =1
2gt2 (3.18)

35
Guía Unificada de Laboratorios
Código
Páginas 2 de 6
FLA -23 v.00
De esto es posible determinar la aceleracion gravitacional si que conoce la alturaa la cual se deja caer libremente el objeto y el tiempo que tarda en recorrer estaaltura.
De las ecuaciones de movimiento uniformemente acelerado, es posible encontrarala velocidad con que cae el cuerpo con la siguiente ecuacion,
v =√
2gy (3.19)
4. Materiales, equipos e insumos:
Equipos
1. Conmutador De impacto o Sensor de caıda libre
1. Contador digital, 4 decadas
Materiales
1. Pie en A-PASS
6. Tornillos
2. Apoyos de plastico de altura regulable
1. Varilla cuadrada PASS-L 1000mm
2. Pasador de sujecion con 2 tornillos
1. Esfera de acero, Diam. 19 mm
3. Cabe de conexion 32 A, 1000mm
1. Disparador
1. Porta esfera max.12V con varilla
1. Soporte para regla con 1 tornillo
1. Regla graduada, L 1000mm.
2. Corredera para regla graduadas
1. Cable adaptador para el contador
5. Procedimiento
1 Ubique el disparador de bola y platillo interruptor sobre la barra de sujecioncomo indica la Figura 3.11.

36
Guía Unificada de Laboratorios
Código
Páginas 3 de 6
FLA -23 v.00
Figura 3.11: Montaje para estudiar la caıda de un cuerpo
Figura 3.12: Disparador de bola y platillo interruptor
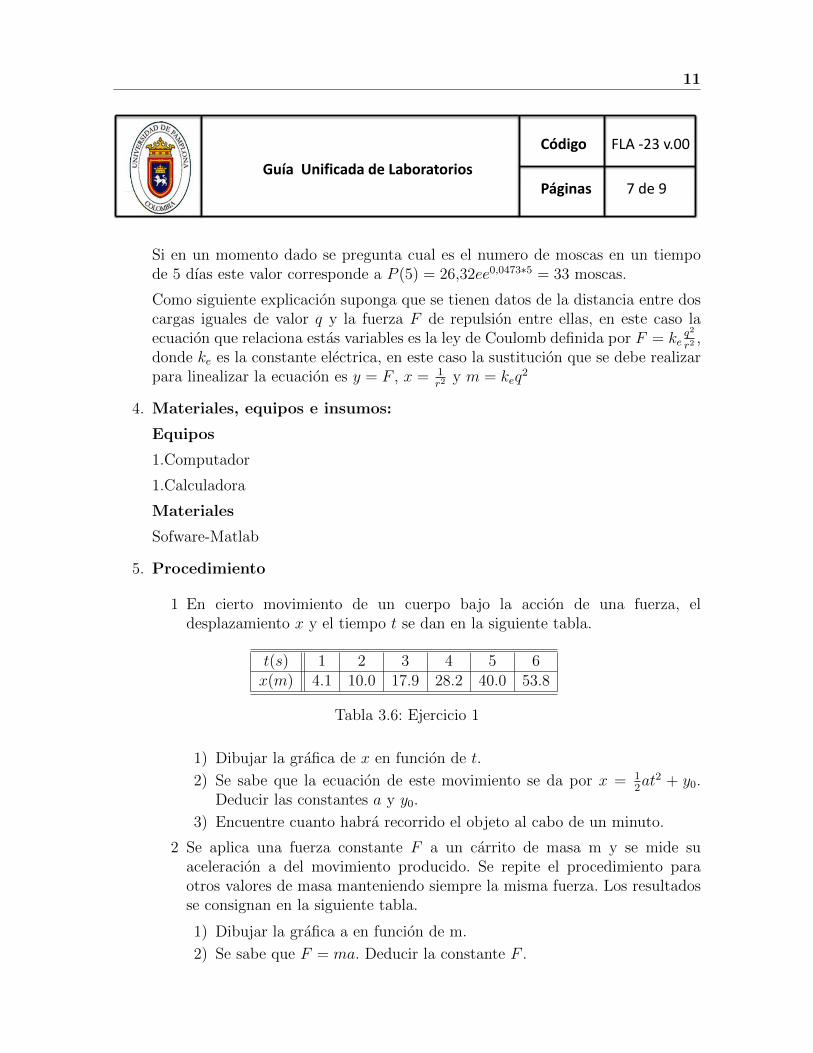
2 Conecte el disparador de bola utilizando dos cables, conectandolos en elpar de conectores hembra STAR/STOP, indicado por el numero 9 en laFigura 3.13, luego conecte el platillo interruptor utilizando los dos cables,conectandolos en el par de conectores hembra STOP, indicados por el numero
37
Guía Unificada de Laboratorios
Código
Páginas 4 de 6
FLA -23 v.00
10 de indica la Figura 3.13.
Figura 3.13: Medidor de tiempo de caıda
3 Conecte el contador digital a la red de corriente alterna.
4 Para la activacion del modo de funcionamiento TIMER se ha de pulsarla tecla FUNCTION, indicado por el numero 7 de la Figura 3.13 hastaque se encienda el diodo rotulado TIMER y en la regleta de diodoselectroluminiscentes situada sobre dicha tecla, luego pulsando la teclaTRIGGER, indicado por el numero 8 de la Figura 3.13, hasta que seencienda el diodo rotulado como se ilustra en la parte superior derecha de laFigura 3.13.
5 Cerciorese que el disparador de bola y el platillo interruptor esten alineados.
6 Ubique la esfera de acero en el disparador de bola y mantengala con el cabledel disparador, asegurese que el platillo interruptor no este presionado, yaque esto indica que el platillo interruptor esta cerrado y no esta apto parauna medicion de tiempo.
7 Despues de haber realizados los pasos anteriores, presione la tecla RESET,indicado por el numero 3 como muestra la Figura 3.13.
8 Ubique el disparador junto con la esfera a la altura indicada en la Tabla 3.15,ubicandola con ayuda de la escuadra al lado de este, presione STAR y sueltela esfera metalica, dejando de presionar el cable disparador.
9 El tiempo que tarda en caer la altura determinada, se muestra en el indicadordigital, indicado por el numero 13 de la Figura 3.13, este tiempo esta enmilisegundos (ms), para obtener el tiempo de caıda en segundos, se ha de

38
Guía Unificada de Laboratorios
Código
Páginas 5 de 6
FLA -23 v.00
presionar la tecla DISPLAY, indicado por el numero 6 de la Figura 3.13,hasta que se encienda el diodo rotulado que indica la opcion s, la cual significaque el tiempo es en segundos, realice cada medida cinco veces y registre susvalores en la Tabla 3.15.
a) Obtenga el promedio del tiempo de caıda.
b) Calcule el cuadrado del tiempo de caıda.
c) Grafique la altura vs el tiempo de caıda.
d) Grafique la altura vs el tiempo al cuadrado de caıda.
e) Con los datos graficados anteriormente aplique mınimos cuadrados paracalcular la aceleracion gravitacional con ayuda de la ecuacion (3.18).Nota: Recuerde que la ecuacion (3.18) no es una ecuacion lineal, por lotanto hay que linealizar esta, por esto, es necesario convertir la ecuaciondel movimiento, en la forma: y = mx donde, y =altura del cuerpo,m = 1/2g =pendiente y x = t2
6. Nivel de riego
Nivel 1 (Bajo)
7. Anexos
Cuestionario
a) ¿Como es la dependencia de la gravedad con la altura?
Altura t1 t2 t3 t4 t5 tpromedio t2promedio8070605040
Tabla 3.15: Calculo de la gravedad
Preguntas de control
a) ¿Coincide el valor de la gravedad obtenida con el valor teorico de la misma?

39
Guía Unificada de Laboratorios
Código
Páginas 6 de 6
FLA -23 v.00
b) ¿Que tipo de movimiento es el que se analiza? Por que dicha conclusion?
c) Describa las caracterısticas fısicas de una caıda libre?

40
Guía Unificada de Laboratorios
Código
Páginas 1 de 8
FLA -23 v.00
1. Titulo:
Movimiento parabolico
2. Objetivos
Encontrar la velocidad inicial de salida de un proyectil.
Predecir y verificar el alcance de un proyectil lanzado a cierto angulo θ.
Analizar la influencia del angulo de inclinacion θ, en el alcance horizontal deun proyectil.
Analizar la influencia del angulo de la velocidad inicial v0, en el alcancehorizontal de un proyectil
3. Marco Teorico
Figura 3.14: Movimiento parabolico de un cuerpo
Se le denomina movimiento parabolico cuando la trayectoria seguida por unapartıcula es una parabola. Para determinar la posicion de la partıcula en cualquierinstante de tiempo se utiliza la siguiente expresion

41
Guía Unificada de Laboratorios
Código
Páginas 2 de 8
FLA -23 v.00
~r = ~r0 + ~v0 +1
2~at2 (3.20)
Una de la aplicaciones mas interesantes a este tipo de movimientos, es ellanzamiento de proyectiles. En este caso ~a = ~g =aceleracion de la gravedad,escogeremos el plano XY como se muestra en la Figura 3.14, que es plano definidopor ~v0 y ~g. Como el eje Y hacia arriba positivo de modo que ~a = −g~uy. Tenemos
~v0 = v0x~ux + v0y~uy, (3.21)
donde v0x = v0 cos θ, v0y = v0senθ.Para encontrar la velocidad en funcion del tiempo, tenemos
~v = v0x~ux + (v0y − gt)~uy, (3.22)
donde
vx = v0x, vy = v0y − gt (3.23)
A partir de la ecuacion (3.20), determinamos la posicion de la partıcula encualquier instante de tiempo
~r = (x0 + v0xt)~ux + (y0 + v0yt−1
2gt2)~uy, (3.24)
donde
x = x0 + v0xt, y = y0 + v0yt−1
2gt2 (3.25)
LANZAMIENTO HORIZONTAL
Es una variacion del lanzamiento parabolico, pero en este caso en angulo deinclinacion con respecto a la horizontal es θ = 0. Para predecir donde caera elproyectil sobre el piso, cuando este es disparado desde cierta altura y0, es necesariosaber la distancia tanto horizontal como vertical recorrida por el proyectil. Si este

42
Guía Unificada de Laboratorios
Código
Páginas 3 de 8
FLA -23 v.00
es lanzado horizontalmente con una velocidad inicial v0, la distancia horizontalrecorrida, (si x0 = 0 para t0 = 0, ver ecuacion 3.23) sera
x = v0t (3.26)
la distancia horizontal recorrida sera D o R, si la trayectoria seguida es A o B,ver Figura 3.15, donde t, es el tiempo que permanece el proyectil en el aire. Ladistancia horizontal recorrida cuando (v0y = 0 para t0 = 0, ver ecuacion 3.23) es
y = y0 −1
2gt2 (3.27)
La velocidad inicial v0 del proyectil puede ser determinada midiendo las distanciasx e y ver Figura 2 y 3. El tiempo de vuelo debe ser encontrado a partir de laecuacion 3.25,
t =
√−2(y − y0)
g(3.28)
Por lo que la velocidad inicial v0 puede ser determinada a partir de (3.24) conayuda de la ecuacion (3.26), obtenemos
v0 =x
t(3.29)
para predecir el alcance horizontal (D o R, si la trayectoria seguida es A o B, verFigura 3.16) del proyectil lanzado con una velocidad inicial v0, con un angulo deinclinacion θ por encima de la horizontal, primero se predice el tiempo de vueloutilizando la ecuacion para el movimiento vertical (ver ecuacion 3.23)
y = y0 + v0senθt−1
2gt2, (3.30)
donde y0 es la altura vertical inicial y t es el tiempo de vuelo. Luego el alcancehorizontal es (ver ecuacion 3.21 y 3.23)
x = v0 cos θt (3.31)

43
Guía Unificada de Laboratorios
Código
Páginas 4 de 8
FLA -23 v.00
Mesa 1
Mesa 2
Piso
Figura 3.15: Lanzamiento Horizontal
Mesa 1
Mesa 2
Piso
Figura 3.16: Lanzamiento de un proyectil

44
Guía Unificada de Laboratorios
Código
Páginas 5 de 8
FLA -23 v.00
4. Materiales, equipos e insumos:
Materiales
2. Esferas (madera y acero)
1. Medidor de velocidad
1. Plataforma de lanzamiento
2. Mesas
1. Regla graduada en mm
1. Hoja de papel carbon
1. Hoja de papel bond
1. Cable adaptador para el Medidor
5. Procedimiento
Lanzamiento Horizontal
1 Realice el montaje de la Figura 3.15, coloque el lanzador de proyectileshorizontalmente formando un angulo de cero grados.
2 Mida la distancia vertical desde el punto de salida del proyectil (centro delproyectil) hasta el piso. Regıstrela en la Tabla 1. de datos de lanzamientohorizontal como y0 = a+ b+ c (ver Figura 3.15).
3 Cargue el lanzador de proyectiles asegurandose que la esfera quede encajadaen la catapulta y disparelo.
a) Coloque sobre el punto en la mesa 2 o en el piso donde cayo el proyectil lahoja de papel bond con el papel carbon sobre ella.
4 Repita este procedimiento cinco veces para cada una de las tres velocidadesque posee la catapulta y registre los valores medidos de la velocidad inicial v0
en la Tabla 1 con ayuda del sistema de medida de velocidad montado sobrela unidad balıstica. Retire con cuidado el papel carbon y mida la distanciahorizontal (D = e + f o R = e + f + l, ver Figura 3.15), justo debajo de elpunto e lanzamiento, hasta cada uno de los puntos marcados por el proyectilsobre el papel bond.
5 Registre estos datos en la Tabla 3.16, para el lanzamiento horizontal comox1, x2, · · · , x5.

45
Guía Unificada de Laboratorios
Código
Páginas 6 de 8
FLA -23 v.00
Lanzamiento Parabolico
Parte A: Velocidad Inicial Fija y Diferentes Angulos.
1 Incline el lanzador de proyectiles angulos de 30◦, 45◦ y 60◦ como se muestraen la Figura 4 y regıstrelos en la Tabla 2.
2 Mida la distancia vertical desde el punto de salida del proyectil (centro delproyectil) hasta el piso. Regıstrela en la Tabla 2 de datos de lanzamientocomo y0.
3 Registre los datos de la velocidad inicial como v0A en la Tabla 3.17
4 Cargue el lanzador de proyectiles en la escala intermedia de las tres que posee,asegurandose que la esfera quede encajada en la catapulta y disparelo.
5 Coloque sobre el punto en el piso donde cayo el proyectil la hoja de papelbond con el papel carbon encima.
6 Repita este procedimiento cinco veces para cada uno de los angulosseleccionados. Retire el papel carbon y mida la distancia horizontal (D =e+f o R = e+f+ l, ver Figura 3.16) hasta cada uno de los puntos marcadospor el proyectil sobre el papel bond.
7 Registre estos datos en la Tabla 3.17, para el lanzamiento correspondiente acada angulo θ como x1, x2, · · · , x5.
Parte B: Angulo Fijo y Diferentes Velocidades Inıciales
1 Incline el lanzador de proyectiles un angulo θ entre 0◦ y 60◦ como se muestraen la Figura 3.16.
2 Mida la distancia vertical desde el punto de salida del proyectil (centro delproyectil) hasta el piso. Regıstrela en la Tabla 3.18 de datos de lanzamientocomo y0.
3 Cargue el lanzador de proyectiles, asegurandose que la esfera quede encajadaen la catapulta y disparelo.
4 Coloque sobre el punto en el piso donde cayo el proyectil la hoja de papelbond con el papel carbon encima.

46
Guía Unificada de Laboratorios
Código
Páginas 7 de 8
FLA -23 v.00
5 Repita este procedimiento cinco veces para cada una de las tres velocidadesque posee la catapulta y registre los valores medidos de la velocidad inicialv0E en la Tabla 3.18 con ayuda del sistema de medida de velocidad montadosobre la unidad balıstica. Retire con cuidado el papel carbon y mida ladistancia horizontal (D = e + f o R = e + f + l, ver Figura 3.16), justodebajo de el punto e lanzamiento hasta cada uno de los puntos marcadospor el proyectil sobre el papel bond.
6 Registre estos datos en la Tabla 3.18, para el lanzamiento correspondiente acada velocidad inicial v0E como x1, x2, · · · , x5.
a) Obtenga el promedio del tiempo de caıda.
b) Calcule el cuadrado del tiempo de caıda.
c) Grafique la altura vs el tiempo de caıda.
d) Grafique la altura vs el tiempo al cuadrado de caıda.
e) Con los datos graficados anteriormente aplique mınimos cuadrados paracalcular la aceleracion gravitacional con ayuda de la ecuacion (3.21).
Nota: Recuerde que la ecuacion (3.21) no es una ecuacion lineal, por lotanto hay que linealizar esta, por esto, es necesario convertir la ecuaciondel movimiento, en la forma: y = mx donde, y =altura del cuerpo,m = 1/2g =pendiente y x = t2
6. Nivel de riego
Nivel 1 (Bajo)
7. Anexos
Cuestionario
a) ¿Como afecta el ambiente un movimiento parabolico?
b) ¿Que diferencia existe entre la trayectoria A y B de la Figura 3.15?
8. Preguntas de control
a) ¿Coincide el valor de la gravedad obtenida con el valor teorico de la misma?
b) ¿Que tipo de movimiento es el que se analiza? Por que dicha conclusion?

47
Guía Unificada de Laboratorios
Código
Páginas 8 de 8
FLA -23 v.00
y0[cm]v0E Distancia horizontal, xpromedio[cm] tiempo v0[m/s]
% ErrorExp.
R o D [cm]xmejor ± δx t [s] teorico
x1 x2 x3 x4 x5
Tabla 3.16: Datos de Lanzamiento Horizontal
y0[cm]v0E
y0[cm]Distancia horizontal, xpromedio[cm] tiempo v0[m/s]
% ErrorExp.
R o D [cm]xmejor ± δx t [s] teorico
x1 x2 x3 x4 x5
Tabla 3.17: Datos para Lanzamiento Parabolico (θ variable)
y0[cm]v0E
y0[cm]Distancia horizontal, xpromedio[cm] tiempo v0[m/s]
% ErrorExp.
R o D [cm]xmejor ± δx t [s] teorico
x1 x2 x3 x4 x5
Tabla 3.18: Datos para Lanzamiento Parabolico (v0 variable)
c) Describa las caracterısticas fısicas de una caıda libre?

48
Guía Unificada de Laboratorios
Código
Páginas 1 de 6
FLA -23 v.00
1. Titulo:
Ley de Hooke
2. Objetivos
Estudiar experimentalmente el comportamiento de los resortes.
Calcular la constante elastica k del resorte.
Verificar la existencia de fuerzas recuperadoras.
3. Marco Teorico
Un cuerpo se denomina elastico si al actuar una fuerza sobre el sufre unadeformacion de tal manera que al cesar la fuerza recupera su forma original.
Cuando una fuerza externa actua sobre un material causa un esfuerzo o tensionen el interior del material que provoca la deformacion del mismo. En muchosmateriales, ente ellos los metales y minerales, la deformacion es directamenteproporcional al esfuerzo. Esta relacion se conoce como la ley de Hooke, que fueel primero en expresarla. No obstante si la fuerza externa supera un determinadovalor, el material puede quedar deformado permanentemente, y la ley de Hooke yano es valida. El maximo esfuerzo que un material puede soportar antes de quedarpermanentemente deformado se denomina limite de elasticidad.
La relacion entre el esfuerzo y la deformacion, denominada modulo de elasticidad,ası como el limite de elasticidad, estan determinados por la estructura moleculardel material. La distancia entre las moleculas de un material no sometido aesfuerzo depende de un equilibrio entre las fuerzas moleculares de atraccion yrepulsion. Cuando se aplica una fuerza externa que crea una tension en el interiordel material, las distancias moleculares cambian y el material se deforma. Si lasmoleculas estan firmemente unidas entre si, la deformacion no sera muy grandeincluso con un esfuerzo elevado. En cambio si las moleculas estan poco unidas,una tension relativamente pequena causara una deformacion grande. Por debajodel lımite de elasticidad, cuando se deja de aplicar la fuerza, las moleculas vuelvena su posicion de equilibrio y el material elastico recupera su forma original. Masalla del lımite de elasticidad, la fuerza aplicada separa tanto las moleculas queno pueden volver a su posicion de partida y el material queda permanentementedeformado o se rompe.

49
Guía Unificada de Laboratorios
Código
Páginas 2 de 6
FLA -23 v.00
Para un resorte sencillo, se determina la constante de elasticidad k como la fuerzaF necesaria para estirarlo en una unidad de longitud ∆x (ver figura 3.17.a), esdecir k = F∆x. En el sistema MKS, la constante k se expresa en N/m. Cuandodos resortes de constantes k1 y k2 se unen por un extremo el sistema resultante(ver figura 3.17.b), como es de suponer, obedece tambien a la ley de Hooke, esdecir, es tambien un sistema elastico o armonico, y su constante elastica k
′obedece
a la ecuacion
1
k′=
1
k1
+1
k2
(3.32)
(a) (b) (c)
Figura 3.17: Configuracion de resortes para la ley de Hooke
Para el caso de resortes en paralelo (ver figura 3.17.c) se cumple
k′= k1 + k2 (3.33)
4. Materiales, equipos e insumos:
Materiales

50
Guía Unificada de Laboratorios
Código
Páginas 3 de 6
FLA -23 v.00
1. Soporte para resortes
6. Resortes de diferente constante
6. Masas de diferente valor
1. Metro
5. Procedimiento
Figura 3.18: Montaje para la ley de Hooke
Montaje 1. Calculo de la Constante de Elasticidad k
1 Realice el montaje de la Figura 3.17.a. Para ello cuelgue un resorte del brazohorizontal del soporte.
2 Mida la longitud inicial del resorte con ayuda de la escala metrica y regıstreloen la Tabla3.19 como X0.
3 Cuelgue del extremo inferior del resorte una masa m. Registre este valor enla tabla de datos 1 como m1. Mida la longitud del resorte y regıstrelo en laTabla3.19. Como Xf1.

51
Guía Unificada de Laboratorios
Código
Páginas 4 de 6
FLA -23 v.00
4 Varie el valor de la masa colgante cuatro veces y registre estos valores enla Tabla3.19. Como m2, m3, m4 y m5. Tambien mida la longitud final delresorte en cada caso y regıstrelos en la Tabla3.19 como Xf2, Xf3, Xf4 y Xf5.
5 Cambie el resorte por otro de diferente dureza. Repita los pasos 1, 2, 3, y 4.Registre estos datos en la Tabla3.20.
Montaje 2. Sistema de Resorte en Serie y en Paralelo.
1 Coloque los resortes 1 y 2 en serie segun la figura 3.17.b. Y repita los pasos2,3 y 4 del montaje 1. Registre estos datos en la Tabla3.21.
2 Coloque los resortes en paralelo segun la figura 3.17.c. Y repita los pasos 2,3y 4 del montaje 1. Registre estos datos en la Tabla3.22.
a) Encuentre la fuerza aplicada al resorte como F = mg para cada masacolgante m1, m2, m3, m4 y m5. Registre estos datos en la Tabla3.19, comoF1, F2, F3, F4 y F5.
b) Grafique sobre una hoja de papel milimetrado, la fuerza aplicada en funciondel alargamiento ∆x, para el resorte 1. Encuentre graficamente la pendientede la grafica encontrada.
c) Repita los pasos 1 y 2 del procedimiento anterior para el segundo resorte.Registre estos datos en la Tabla3.20, como F1,F2,F3,F4 y F5.
d) Repita los pasos 1, 2 y 3 para el caso de resortes en serie y de resortes enparalelo.
6. Nivel de riego
Nivel 1 (Bajo)
7. Anexos
8. Preguntas de control
a) Que representa la pendiente de la grafica F vs. ∆X.
b) Demuestre que para dos resortes en serie que obedecen la ley de Hooke, laconstante elastica esta dada por la ecuacion 3.32
52
Guía Unificada de Laboratorios
Código
Páginas 5 de 6
FLA -23 v.00
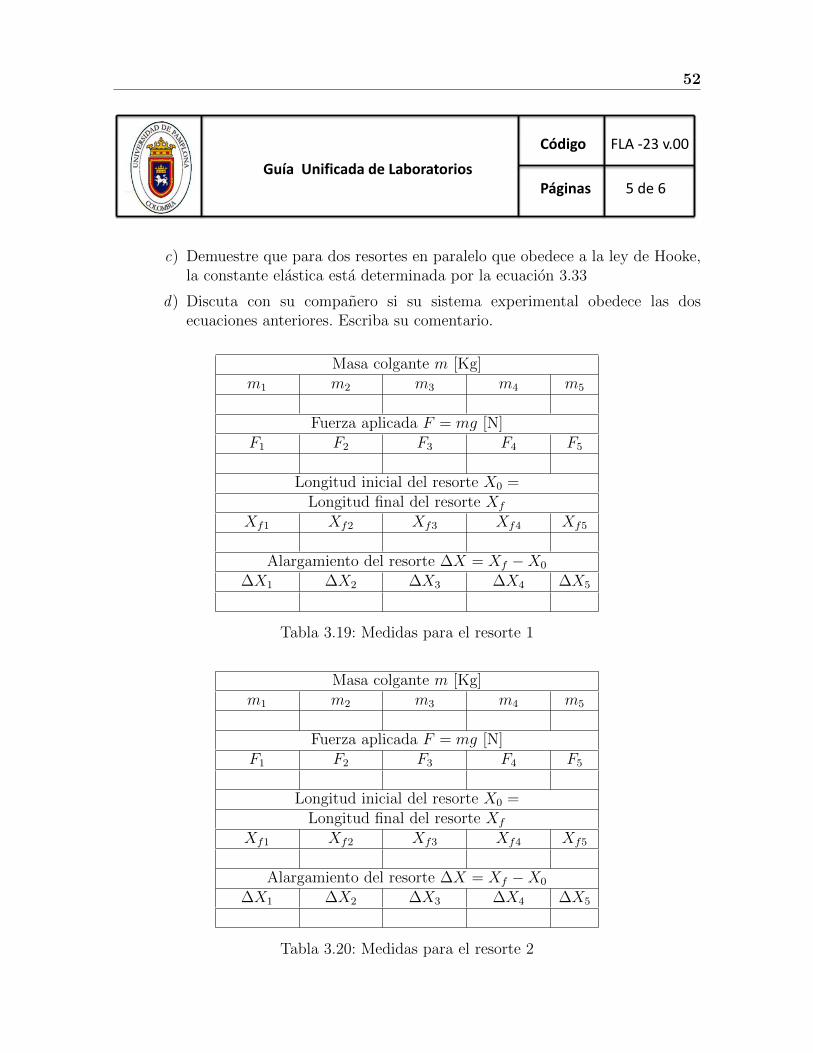
c) Demuestre que para dos resortes en paralelo que obedece a la ley de Hooke,la constante elastica esta determinada por la ecuacion 3.33
d) Discuta con su companero si su sistema experimental obedece las dosecuaciones anteriores. Escriba su comentario.
Masa colgante m [Kg]m1 m2 m3 m4 m5
Fuerza aplicada F = mg [N]F1 F2 F3 F4 F5
Longitud inicial del resorte X0 =Longitud final del resorte Xf
Xf1 Xf2 Xf3 Xf4 Xf5
Alargamiento del resorte ∆X = Xf −X0
∆X1 ∆X2 ∆X3 ∆X4 ∆X5
Tabla 3.19: Medidas para el resorte 1
Masa colgante m [Kg]m1 m2 m3 m4 m5
Fuerza aplicada F = mg [N]F1 F2 F3 F4 F5
Longitud inicial del resorte X0 =Longitud final del resorte Xf
Xf1 Xf2 Xf3 Xf4 Xf5
Alargamiento del resorte ∆X = Xf −X0
∆X1 ∆X2 ∆X3 ∆X4 ∆X5
Tabla 3.20: Medidas para el resorte 2

53
Guía Unificada de Laboratorios
Código
Páginas 6 de 6
FLA -23 v.00
Masa colgante m [Kg]m1 m2 m3 m4 m5
Fuerza aplicada F = mg [N]F1 F2 F3 F4 F5
Longitud inicial del resorte X0 =Longitud final del resorte Xf
Xf1 Xf2 Xf3 Xf4 Xf5
Alargamiento del resorte ∆X = Xf −X0
∆X1 ∆X2 ∆X3 ∆X4 ∆X5
Tabla 3.21: Medidas para los resortes 1 y 2 en serie
Masa colgante m [Kg]m1 m2 m3 m4 m5
Fuerza aplicada F = mg [N]F1 F2 F3 F4 F5
Longitud inicial del resorte X0 =Longitud final del resorte Xf
Xf1 Xf2 Xf3 Xf4 Xf5
Alargamiento del resorte ∆X = Xf −X0
∆X1 ∆X2 ∆X3 ∆X4 ∆X5
Tabla 3.22: Medidas para los resortes 1 y 2 en paralelo
54
Guía Unificada de Laboratorios
Código
Páginas 1 de 6
FLA -23 v.00
1. Titulo:
Segunda ley de Newton
2. Objetivos
Estudiar la segunda ley de Newton.
Determinar que la aceleracion es una funcion de la masa acelerada.
Determinar que la aceleracion es una funcion de la fuerza aplicada.
Determinar la relacion entre la distancia recorrida y el tiempo.
Determinar la relacion entre la velocidad y el tiempo.
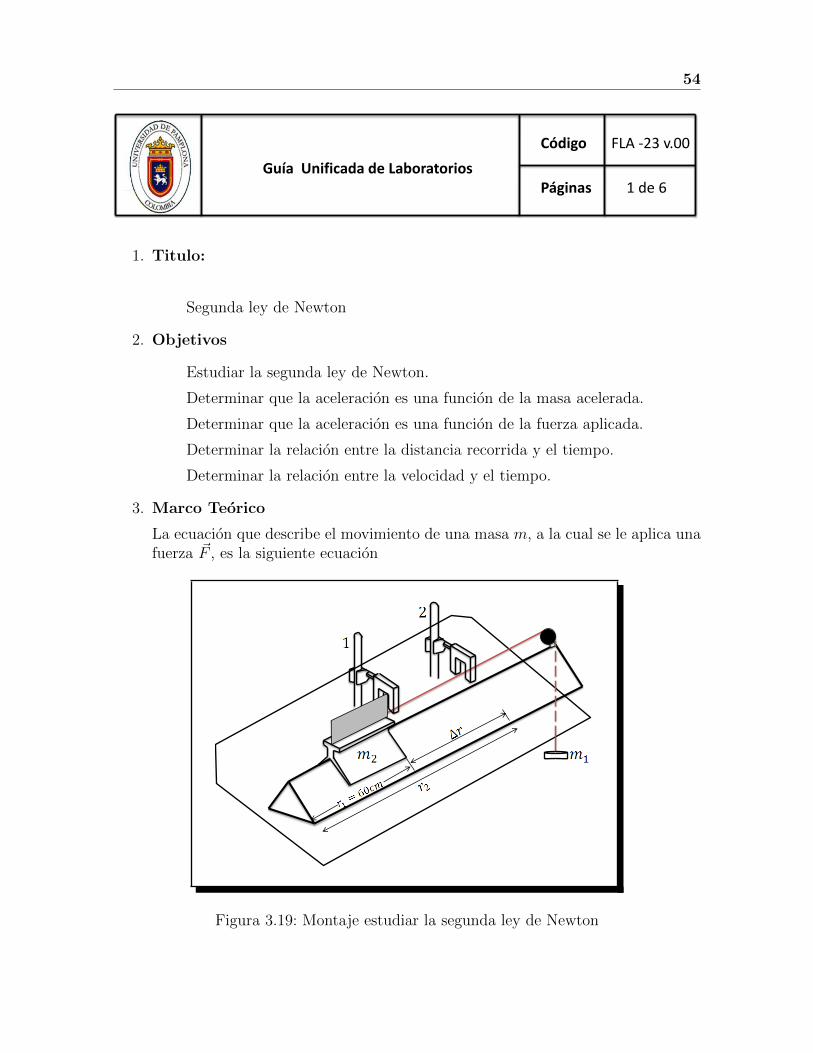
3. Marco Teorico
La ecuacion que describe el movimiento de una masa m, a la cual se le aplica unafuerza ~F , es la siguiente ecuacion
Figura 3.19: Montaje estudiar la segunda ley de Newton

55
Guía Unificada de Laboratorios
Código
Páginas 2 de 6
FLA -23 v.00
~F = m~a, (3.34)
conocida como la segunda ley de Newton, donde,
~a =d2~r
dt2, (3.35)
es la aceleracion de la masa m.
La velocidad de la masa m como una funcion del tiempo para una velocidad inicial~v (0) = 0, es:
~v =~F
mt, (3.36)
y la posicion de la masa como una funcion del tiempo, para una posicion inicial~r (0) = 0:
~r =1
2
~F
mt2 (3.37)
Para el caso estudiado en la presente practica de laboratorio la fuerza es igual alpeso de la masa colgante m1 ∣∣∣~F ∣∣∣ = m1g, (3.38)
donde g es la aceleracion de la gravedad. Si la masa total del deslizador es m2,entonces la ecuacion del movimiento es:
(m1 +m2) |~a| = m1g, (3.39)
La velocidad es:
|~v| ≡ v(t) =m1g
m1 +m2
t, (3.40)
Y el espacio recorrido es:
|~r| ≡ s(t) =1
2
m1g
m1 +m2
t2. (3.41)

56
Guía Unificada de Laboratorios
Código
Páginas 3 de 6
FLA -23 v.00
En caso de conocer el espacio recorrido y el tiempo empleado en este recorrido,se puede calcular la aceleracion como:
a =2s
t2. (3.42)
4. Materiales, equipos e insumos:
Equipos
1. Carril de aire -banco de cojın neumatico 2m
1. Fuente de aıre 115V/60Hz
1. Manguera de presion, long. 1,5m
Materiales
1. Carrito dinamico
1. Contador digital+ 6.conectores
1. Masas y porta masas
1. Cuerda
1. Polea
3. Banderolas
5. Procedimiento
Montaje 1. Variacion de la posicion
1 Nivele el deslizador junto con el riel
2 Realice el montaje de la Figura 3.20.
3 Ajuste el nivel de la fuente hasta antes que el deslizador inicie su movimiento,luego de este ajuste no cambie el valor de la fuente a lo largo del experimento.
4 Coloque la primera fotocelda en el punto de partida a una distancia de 60cm(escala metrica del riel) y la segunda fotocelta a las distancias mostradasen la Tabla 3.23
5 Mida la masa colgante m1
6 Mida la masa del deslizador m2

57
Guía Unificada de Laboratorios
Código
Páginas 4 de 6
FLA -23 v.00
Figura 3.20: Montaje estudiar la segunda ley de Newton
6 Mida cinco veces los tiempos que tarda el deslizador en recorrer la distanciaestablecida y regıstrelos en la Tabla 3.23
Montaje 2. Variacion de la masa.
1 Repita el experimento del Montaje anterior pero en este caso deje constantela distancia entre las fotoceldas en 1m y varıe la masa colgante. Registre susresultados en la Tabla 3.24
a) Calcule el promedio de los cinco tiempos
b) Realice una grafica de ∆r vs. tpromedio.
c) Realice una grafica de ∆r vs. t2promedio.
d) Calcule la pendiente de la recta del numeral anterior.
e) Calcular el promedio de los cinco tiempos cuando se varıa la masa.
f ) Calcule la aceleracion y registre su valor en la Tabla 3.25

58
Guía Unificada de Laboratorios
Código
Páginas 5 de 6
FLA -23 v.00
g) Calcule las dos fuerzas y registre sus valores en la Tabla 3.25
h) Calcule el error de las dos fuerzas y registre su valor en la Tabla 3.25
i) Realice una grafica entre la fuerza neta y la aceleracion.
6. Nivel de riego
Nivel 1 (Bajo)
7. Anexos
m1 = [Kg], m2 = [Kg], r1 = 60cmr2(cm) ∆r(m) t1 t2 t3 t4 t5 tpromedio
Tabla 3.23: Posicion en funcion del tiempo
∆r = 1mm1(Kg) m2(Kg) t1 t2 t3 t4 t5 tpromedio
Tabla 3.24: Aceleracion dependiente de masa
8. Preguntas de control

59
Guía Unificada de Laboratorios
Código
Páginas 6 de 6
FLA -23 v.00
Aceleracion (m1 +m2) a F = m1g error %
Tabla 3.25: Aceleracion dependiente de masa
a) Que significado fısico tiene la pendiente calculada en el numeral 4 del analisisde datos.
b) Se comprueba la segunda ley de Newton F = ma. ¿Quien es m?.
c) Porque en el calculo de la fuerza neta solo se emplea m1.
m

60
Guía Unificada de Laboratorios
Código
Páginas 1 de 5
FLA -23 v.00
1. Titulo:
Conservacion de la energıa
2. Objetivos
Estudiar el concepto de energıa cinetica y potencial .
Comprobar el teorema de conservacion de la energıa.
Reforzar los conocimientos adquiridos en el movimiento parabolico.
3. Marco Teorico
Cuando un cuerpo de masa m tal como un automovil, una pelota se desplaza conuna velocidad vposee energıa llamada en este caso energıa cinetica Ec, esta energıapuede ser causada por la transformacion de otro tipo de energıa por ejemplo,cuando se toma un cuerpo y se lleva hasta una altura h sobre el suelo, se deberealizar un trabajo para subir el cuerpo hasta la altura h, cuando el cuerpo seencuentra a la altura h posee energıa que en este caso es potencial Ep. Al dejarcaer el cuerpo este pierde altura ocasionando con ello una perdida de energıapotencial; esta energıa potencial perdida se transforma en energıa cinetica a causadel incremento de la velocidad del cuerpo; cuando el cuerpo llega al suelo suenergıa potencial es cero por no poseer altura, en este caso su energıa potencialse ha convertido en energıa cinetica es decir:
Ec = Ep (3.43)
Este fenomeno se puede generalizar si tomamos dos puntos A y B, donde la energıatotal es decir la suma de la energıa cinetica y potencial en los puntos son EA yEB respectivamente, las cuales deben ser iguales, lo que constituye el teorema deconservacion de la energıa. Cuando el objeto se mueve del punto A al punto B,puede perder energıa por otras causas, por ejemplo la friccion, en este caso no secumple que EA = EB, porque la energıa final es menor que la energıa inicial; elteorema de conservacion de energıa es ene este caso:
EA = EB +W, (3.44)

61
Guía Unificada de Laboratorios
Código
Páginas 2 de 5
FLA -23 v.00
donde W es el trabajo realizado por las fuerzas no conservativas, como por ejemplola friccion. Las expresiones para la energıa potencial y la energıa cinetica son:
Ec =1
2mv2 Ep = mgh, (3.45)
Considerando ahora una esfera pequena de masa m = 9,6g, que se encuentra auna altura h sobre una mesa en el punto A, como se muestra en la figura 3.21; alsoltar la esfera esta sale disparada con una velocidad horizontal v0 en el punto By viaja con un movimiento parabolico hasta el punto C.
En el punto A, la energıa es solo potencial y esta determinada por:
EA = mg (h+H − h0) , (3.46)
y la energıa en el punto B, es la suma de la energıa cinetica y potencial en elpunto es decir
EB = mg (H + h0) +1
2mv2
0 (3.47)
Finalmente la energıa en el punto C, es solo cinetica debido a que la altura escero
EC =1
2mv2 (3.48)
A causa del movimiento parabolico la esfera recorre una distancia horizontal Ldada por
L = v0t, (3.49)
donde t es el tiempo que tarda la esfera en viajar de B a C, de igual forma paracalcular la velocidad inicial del movimiento parabolico v0 utilizamos la ecuaciony = y0 + v0yt− 1
2gt2
0 = (H + h0)− 1
2gt2 = (H + h0)− 1
2gL2
v20
o v0 =
√gL2
2 (H + h0)(3.50)

62
Guía Unificada de Laboratorios
Código
Páginas 3 de 5
FLA -23 v.00
Las componentes de la velocidad en el punto C se pueden calcular con vx = v0x
y vy = v0y − gt
vx = v0 y vy = −g Lv0
(3.51)
con lo cual la velocidad en el punto C es
v =√v2x + v2
y =
√v2
0 + g2L2
v20
(3.52)
4. Materiales, equipos e insumos:
Equipos
1. Mesa de lanzamiento
Materiales
1. Metro
1. Papel calcante
5. Procedimiento
1 Realice el montaje de la figura 3.21
2 Mida el valor de las alturas fijas H y h0 y registre sus valores en la Tabla3.26
3 Deje caer la esfera desde una altura h sobre el nivel de la mesa, registre elvalor de la altura h en la Tabla 3.26
4 Determine la distancia horizontal L recorrida por la esfera antes de golpearel suelo por primera vez, determine esta medida tres veces para la mismaaltura h.
5 Repita el numeral anterior para diferentes valores de h y registre los valoresde h y L obtenidos en la Tabla 3.26
a) Calcule los promedios de L para cada una de las alturas h y regıstrelos en laTabla 3.26 como L.
b) Utilizando la ecuacion 3.50 calcule v0 para cada una de las alturas h yregıstrelo en la Tabla 3.27

63
Guía Unificada de Laboratorios
Código
Páginas 4 de 5
FLA -23 v.00
Figura 3.21: Montaje para la conservacion de la energıa
c) Utilizando la ecuacion 3.52 calcule los valores de v para cada una de lasalturas h y regıstrelos en la Tabla 3.27
d) Utilizando la ecuacion 3.46 calcule la energıa en el punto A para cada unade las alturas h.
e) Utilizando la ecuacion 3.47 calcule la energıa en el punto B para cada unade las alturas h.
f ) Utilizando la ecuacion 3.48 calcule la energıa en el punto C para cada unade las alturas h.
6. Nivel de riego
Nivel 1 (Bajo)
7. Anexos
Cuestionario

64
Guía Unificada de Laboratorios
Código
Páginas 5 de 5
FLA -23 v.00
a) ¿Que es trabajo?
b) ¿Que es energıa potencial?
c) ¿Que es energıa cinetica?
d) ¿Que establece el principio de conservacion de la energıa?
e) ¿Que son fuerzas conservativas y no conservativas?
h L1 L2 L3 L
Tabla 3.26: Distancia horizontal recorrida
h v0 v EA EB EC
Tabla 3.27: Calculos de las energıas a partir de las alturas y las velocidades
8. Preguntas de control
a) ¿Coinciden los valores de la energıa en los puntos A, B y C?.
b) ¿En caso de existir una diferencia en los valores del inciso anterior justifique?.
c) ¿Realizando una regresion lineal entre EA y h, para determinar la gravedad?.
d) ¿Que significado fısico tiene el corte de la ecuacion anterior?

65
Guía Unificada de Laboratorios
Código
Páginas 1 de 14
FLA -23 v.00
1. Titulo:
Dinamica de un cuerpo rıgido
2. Objetivos
Investigar la inercia rotacional de algunas distribuciones de masas conocidas.
Determinar el momento de inercia de un disco, una varilla de inercia y undoble disco, utilizando los metodos experimentales y el metodo analıtico paraluego comparar la diferencia entre ellos.
3. Marco Teorico
La relacion entre el momento angular ~L de el cuerpo rıgido en un sistema decoordenadas, estacionario con su origen en el centro de gravedad, y el torque τactuando sobre el es (ver Figura 3.22)
Figura 3.22: Dinamica de un cuerpo rıgido
~τ =d~L
dt(3.53)
El momento angular se expresa a traves de la velocidad angular ~ω y del momentode inercia I ası
~L = I~ω (3.54)

66
Guía Unificada de Laboratorios
Código
Páginas 2 de 14
FLA -23 v.00
En este caso, ~ω tiene la direccion del eje principal de inercia (el eje z); de manera
que ~L tiene solo una componente:
Lz = Izω (3.55)
Donde Iz es la componente z principal del momento de inercia del cuerpo. Paraeste caso, la ecuacion (3.53) se convierte en:
τz = Izdω
dt(3.56)
En terminos de la fuerza ~F , que es la fuerza ejercida por la masa colgante (verFigura 3.22), el torque sera
~τ = ~r × ~F (3.57)
Como para ~r⊥~F , la componente z del torque es:
τz = rmg (3.58)
Por esto la ecuacion del movimiento es:
rmg = Izdω
dt= Izα (3.59)
De aquı se obtiene
Iz =rmg
α(3.60)
donde α es la aceleracion angular del cuerpo rıgido.
Si ahora queremos determinar la energıa cinetica total del cuerpo que gira, estasera igual a la suma de la energıa cinetica de todas las partıculas que componenel cuerpo, consecuentemente:
Ek =1
2m1r
21ω
2 +1
2m2r
22ω
2 + · · · (3.61)
67
Guía Unificada de Laboratorios
Código
Páginas 3 de 14
FLA -23 v.00
Como hemos partido del supuesto de que el cuerpo es rıgido, todas las partıculastendran la misma velocidad angular, lo que permite la factorizacion de la ecuacionanterior:
Ek =1
2
(N∑i=1
mir2i
)ω2 (3.62)
Donde N , es el numero total de partıculas que conforman el cuerpo rıgido. Lacantidad dentro del parentesis es la suma de los productos de las masas de cadapartıcula por el cuadrado de su distancia la eje de rotacion, esta es el momentode inercia, por lo que la ecuacion anterior se puede escribir como:
Ek =1
2Iω2 (3.63)
Aclaracion previa
Para lo concerniente al procedimiento y evaluacion de datos, este fue basado enun solo cuerpo rıgido, un disco o placa giratoria con escala angular, donde esteposee un momento de inercia de 126Kgcm2 y un diametro de 35cm. El estudiantese basara en este ejemplo para la realizacion del analisis de datos y la culminacionde la practica del laboratorio de mecanica-Dinamica del Cuerpo Rıgido.
4. Materiales, equipos e insumos:
Equipos
1. Computador
1. Software measure
1. COBRA 3 Basic -unit
1. Cable USB para Cobra 3
1. Adaptador para Cobra 3
1. Cable de alimentacion con punta removible
Materiales
2. Placas giratorias con escala angular
1. Trıpode PASS con 3 tornillos de nivelacion.

68
Guía Unificada de Laboratorios
Código
Páginas 4 de 14
FLA -23 v.00
DISCO d[cm]
35BARILLA DE INERCIA a[cm] M [Kg]
15 61DISCO DOBLE d[cm]
35
1 tornillo de apriete
1. Diafragma para placa giratoria
1. Eje de rotacion (varilla del trıpode )
1. Disco de accionamiento de d = 60 y d = 90 mm
1. Bulon de eje de 30 mm
1. Tornillo de sujecion del bulon
1. Dispositivo de sujecion con 1 disparador de alambre
2. Pinza de mesa PASS
1. Varilla de acero inox de 25 cm
1. Fotocelda
3. Bananas
1. Doble nuez + 2 tornillos amarillos
2. Platillos para pesa con 2 tornillos c/u
2. Varillas pequenas

69
Guía Unificada de Laboratorios
Código
Páginas 5 de 14
FLA -23 v.00
1. Porta pesa de 1g.
1. Gancho para pesa de 10 g.
1. Hilo de seda -carrete, L 200m
1. Varilla de inercia con 1 diafragma
1. Rueda incremental
2. Pesas de 1g.
10 Pesas de 10g.
2. Pesas de 50g.
5. Procedimiento
Figura 3.23: Montaje para estudiar la dinamica del cuerpo rıgido
1 Ejecute la conexion electrica de la fotocelda a la unidad basica cobra 3 deacuerdo a la Figura 3.24

70
Guía Unificada de Laboratorios
Código
Páginas 6 de 14
FLA -23 v.00
AmarilloAzul
OUT
TIMER/COUNTER
STOP
START
S1
ANALOG IN 1S2
ANALOG IN 2
5V/max 0.2 A
BASIC UNIT
MODULO
1 2
Rojo
Figura 3.24: Conexion dinamica de un cuerpo rıgido
2 Asegurese de que el hilo que conecta al eje de rotacion con la polea de lafotocelda este horizontal. Enrolle el hilo aproximadamente 15 veces alrededordel eje de rotacion.
3 Ajuste el trıpode de modo que el cuerpo rıgido a colocar quede horizontal.
4 Abra el programa “mesaure”, en el icono “gauge/traslation/rotations”, fijelos parametros de medida de acuerdo con la Figura 3.25. Coloque el hilo deseda a traves de la polea de la fotocelda y ajuste el arreglo experimental demanera tal que la masa se mantenga suspendida libremente. La ranura parael cordon en la polea debe estar alineada con el hilo de seda.
5 Ponga el cuerpo rıgido quieto (para ponerlo a girar) en la posicion de inicio.

71
Guía Unificada de Laboratorios
Código
Páginas 7 de 14
FLA -23 v.00
Ingrese el diametro del eje del disco giratorio (que para este ejemplo es de30 mm) alrededor del cual ira enrollado el hilo de seda, en el icono “Axiediameter” (diametro del eje) en la ventana de dialogo, de esta manera lasvelocidades rotacionales de la fotocelda y del eje del disco giratorio puedenser sincronizadas.
6 El final del hilo de seda es cargado con una masa (que para este ejemploes de 10 g). Tan pronto como el cuerpo rıgido empiece a rotar, haga clicksobre el icono “start measurement” (iniciar medida), justo antes de que lamasa alcance el piso, haga click sobre el icono “stop measurement” (detenerla medicion). Es importante tener en cuenta que la masa colgante no debeoscilar durante la toma de datos, esto para prevenir el aumento en el errorde los calculos.
Nota: si la base donde esta girando el cuerpo rıgido no rota uniformemente, revisesi este puede rotar en la direccion opuesta, mejorando ası la situacion.
Figura 3.25: Configuracion software para la practica dinamica de un cuerpo rıgido
Despues de haber realizado el inciso 6 del procedimiento, usted podra observar lo

72
Guía Unificada de Laboratorios
Código
Páginas 8 de 14
FLA -23 v.00
siguiente:
1 La Figura 3.26 muestra la curva de velocidad angular ω Vs. Tiempo, si el
icono de Regression”(Regresion) es cliqueado, una lınea de regresion sedibuja a traves de los puntos medidos, como esta es una recta de la formay = mx+ b y teniendo en cuenta la relacion, ω = αt.
Es facil identificar que la pendiente de esta, la cual representa la aceleracionangular ω. En el ejemplo de la Figura 3.26, la aceleracion angular es,α = 0,463rad/s2
Vale la pena aclarar que en el caso ideal la recta de regresion aplicada a lavelocidad angular ω, deberıa resultar una recta de la forma, y = mx pero elruido excesivo en el arranque de la medida es debido a la baja resolucion enel rayo del disco que interrumpe la fotocelda a bajas velocidades.
2 La Figura 3.27 muestra el progreso de la aceleracion angular en el tiempo,aquı tambien aplicamos regresion lineal. Hay que resaltar, que es posibleajustar los datos que se deseen utilizar al momento de aplicar la regresionlineal, en este caso, se realiza seleccionando dos pequenos cuadrados queaparecen al momento de aplicar regresion lineal y desplazarlos haciala derecha o la izquierda, ubicandolos donde se desee. Como para unmovimiento rotatorio con aceleracion uniforme, la aceleracion angular comofuncion del tiempo es constante, por lo que es importante ajustar la lıneade regresion, a una lınea de pendiente aproximadamente cero, esto con elfin de cumplirlo anteriormente mencionado (aceleracion angular constante ouniforme), el ejemplo de la Figura 3.27, se identifica que b = 0,443rad/s2
Donde este provee un valor inicial para la aceleracion angular. Aproximandoen lo posible a una recta de pendiente nula, que para este ejemplo mostradoen la Figura 3.27, el valor mas bajo logrado fue de m = 0,001, esto paraque el movimiento rotatorio sea en lo posible con una aceleracion constanteo uniforme.
3 La Figura 3.29 muestra la curva del Angulo recorrido como funcion deltiempo, la cual exhibe un comportamiento parabolico, en la cual los puntosmedidos fueron fuertemente enfatizados.
4 La energıa rotacional Figura 3.28, en este caso el valor teoricodel momento de inercia es: I = 0,0165kg/m2. Para realizar laoperacion indicada, la conversion es echa por: “Analisis/Channelmodification/Operacion/f := 0,5 ∗ 0,0165 ∗ x ∗ x”,antes de cliquear

73
Guía Unificada de Laboratorios
Código
Páginas 9 de 14
FLA -23 v.00
“calculate” se recomienda al estudiante realizar lo ilustrado en la Figura3.31
Esto con el fin de asignarle un nombre al nuevo canal que se genero, paraeste caso, el titulo sera “Title:Erot”, pero el nombre del canal sera “Ero”.
Figura 3.26:
5 La energıa potencial de la Figura 3.28 corresponde a: Epot = mg(h − s(t)).Donde h = 0,77m que es la altura medida desde el nivel del piso a lacual se deja caer la masa colgante y s(t) = ϕ(t)r. Usando la conversion“Analisis/channel modification/operation,f := 0,051 ∗ 9,81 ∗ (0,77 −x ∗ 0,015)”, donde x = ϕ(t).
6 La ley de conservacion de la energıa establece que la suma de la energıacinetica y potencial en un sistema cerrado debe ser constante, que para elcaso de un cuerpo rıgido con una masa colgante (ver ecuacion 3.63) es:
E =1
2mv2 +
1
2Iω2 +mgh · · · (3.64)
Ahora para calcular la velocidad de la masa colgante despues de haberrecorrido una distancia h, hay que tener en cuenta que la velocidad de partidadebe ser nula y que la aselaron que experimenta el cuerpo colgante puede

74
Guía Unificada de Laboratorios
Código
Páginas 10 de 14
FLA -23 v.00
Figura 3.27:
Figura 3.28:
ser encontrada a partir de la de la aceleracion angular, por lo que resulta lasiguiente relacion:
v =√
2hrα (3.65)

75
Guía Unificada de Laboratorios
Código
Páginas 11 de 14
FLA -23 v.00
Figura 3.29:
Para este ejemplo la energıa cinetica del cuerpo colgante no se tuvo encuenta, ya que esta energıa es extremadamente pequena comparada con lasotras dos formas de energıas presentes y por lo tanto se ignoraron en estoscalculos. Para el caso que se quiera tener en cuenta la velocidad angular sedebe representar la velocidad en funcion de la velocidad angular, es decirv = ω(t)r, donde r, es el radio de giro (ver Figura 3.22).
El procedimiento 1, 2 y 3 son estandar para todos los montajes.
PARTE A: Masa colgante fija y Radios de Accion Diferentes
Los siguientes ıtem se realizaran para los cuerpos: disco, barrilla de inercia y discodoble. Cada uno de estos cuerpo posee su tabla de datos correspondiente, por loque se debe llenar basados en los ıtem que a continuacion se explicaran y que seaplican a cada caso.
1 Realice el montaje de la Figura 3.23.
2 A partir del procedimiento 4, realice los ajustes para iniciar la toma dedatos de acuerdo a la Figura 3.22, donde estos son basados en los datospredispuestos en la Tabla 3.28. Despues de haber realizado lo anterior serealizan el ıtem 5 y 6 del procedimiento.

76
Guía Unificada de Laboratorios
Código
Páginas 12 de 14
FLA -23 v.00
Figura 3.30:
3 Realice los ıtem de la evaluacion de datos 1 y 2, calcule el valor de laaceleracion angular y completando ası la Tabla 3.28.
4 Despues de haber realizado lo anterior, grafique el torque Vs. aceleracionangular promedio.
5 Aplicando mınimos cuadrados, encuentre el valor del momento de inercia ycomplete la Tabla 3.28.
PARTE B: Radios de Accion Fijo y Diferentes Masa Colgantes
Los siguientes ıtem se realizaran para los cuerpos: disco, barrilla de inercia y discodoble. Cada uno de estos cuerpo posee su tabla de datos correspondiente, por loque se debe llenar basados en los ıtem que a continuacion se explicaran y que seaplican a cada caso.’
1 A partir del procedimiento 4, realice los ajustes para iniciar la toma dedatos de acuerdo a la Figura 3.25, donde estos son basados en los datos

77
Guía Unificada de Laboratorios
Código
Páginas 13 de 14
FLA -23 v.00
Figura 3.31:
predispuestos en la Tabla 3.29. Despues de haber realizado lo anterior serealizan el ıtem 5 y 6 del procedimiento.
2 Realice los ıtem de la evaluacion de datos 1 y 2, calcule el valor de laaceleracion angular y completando ası la Tabla 3.28.
3 Despues de haber realizado lo anterior, grafique el torque Vs. aceleracionangular promedio.
4 Aplicando mınimos cuadrados, encuentre el valor del momento de inercia ycomplete la Tabla 3.29.
6. Nivel de riego
Nivel 1 (Bajo)

78
Guía Unificada de Laboratorios
Código
Páginas 14 de 14
FLA -23 v.00
7. Anexos
DISCOMasa colgante [g] Radio [cm] Torque α1 α2 αpromedio I
50306090
BARILLA DE INERCIAMasa colgante [g] Radio [cm] Torque α1 α2 αpromedio I
75306090
DISCO DOBLEMasa colgante [g] Radio [cm] Torque α1 α2 αpromedio I
100306090
Tabla 3.28: Datos medidos
DISCORadio [cm] Masa colgante [g] Torque α1 α2 αpromedio I
605075100
BARILLA DE INERCIARadio [cm] Masa colgante [g] Torque α1 α2 αpromedio I
605075100
DISCO DOBLERadio [cm] Masa colgante [g] Torque α1 α2 αpromedio I
605075100
Tabla 3.29: Datos medidos

79
Guía Unificada de Laboratorios
Código
Páginas 1 de 7
FLA -23 v.00
1. Titulo:
Pendulo balıstico
2. Objetivos
Verificar el principio de conservacion de cantidad de movimiento y de lano verificacion del principio de conservacion de la energıa en un choqueinelastico.
Revisar la teorıa fısica y los principios fundamentales que estan presentes enel experimento planteado.
Determinar la velocidad de disparo de un proyectil utilizando el metodoaproximado y el metodo exacto.
3. Marco Teorico
Los principios de conservacion son fundamentales para la Fısica. Por medio deestos principios es posible estudiar y predecir la evolucion en el tiempo de muchossistemas. En el caso especıfico de la Mecanica, son de gran importancia losprincipios de conservacion de la energıa, conservacion del momentum lineal yconservacion del momentum angular. En esta practica se utilizara el principio deconservacion del momentum lineal para estudiar el funcionamiento de un pendulobalıstico. Este es un dispositivo clasico que permite medir la rapidez de disparoun proyectil.
Utilizando un pendulo balıstico (Figura 3.33), un proyectil (esfera de acero omadera) de masa m se dispara con rapidez vb, y al chocar contra el pendulo quedaincrustado en el. Como resultado del impacto el conjunto pendulo-proyectil oscilaalrededor del punto de suspension alcanzando una altura maxima ∆h (Figura3.32) sobre el punto donde ocurrio la colision.
La altura ∆h (de ahora en adelante llamaremos h) alcanzada por el pendulopodemos medir su energıa potencial. Esta a su vez es igual a la energıa cineticadel sistema justo despues del choque, si despreciamos la friccion en el pivote delpendulo.
No es posible igualar la energıa cinetica del pendulo justo antes del choque a laenergıa cinetica del proyectil justo despues de el, pues la colision es inelastica.Sin embargo, dado que en toda colision se conserva el momento lineal (cantidad

80
Guía Unificada de Laboratorios
Código
Páginas 2 de 7
FLA -23 v.00
de movimiento), si pueden igualarse los momentos lineales del sistema proyectil-pendulo, justo antes y justo despues del choque.
Figura 3.32: Montaje para estudiar el pendulo balıstico
Primer Metodo (Metodo Aproximado)El cual asume que el pendulo y la bola actuan juntos como una masapuntual localizada en su centro de masas combinado. Este metodo no toma enconsideracion la inercia rotacional.La velocidad inicial de la bola cuando sale del lanzador de proyectiles se determinadisparando la bola dentro del pendulo y observando el angulo maximo que alcanzael pendulo (ver Figura 3.32). La velocidad aproximada de la bola se encuentrautilizando la siguiente ecuacion
vb =M
m
√2gRCM (1− cos θ) (3.66)
Donde
M=Masa del pendulo + proyectil (acero o madera).m=Masa del proyectil (acero o madera).g=Aceleracion de la gravedad.RCM=Es la distancia del pivote al centro de masa del sistema (proyectil +pendulo).θ=Angulo alcanzado por el pendulo.
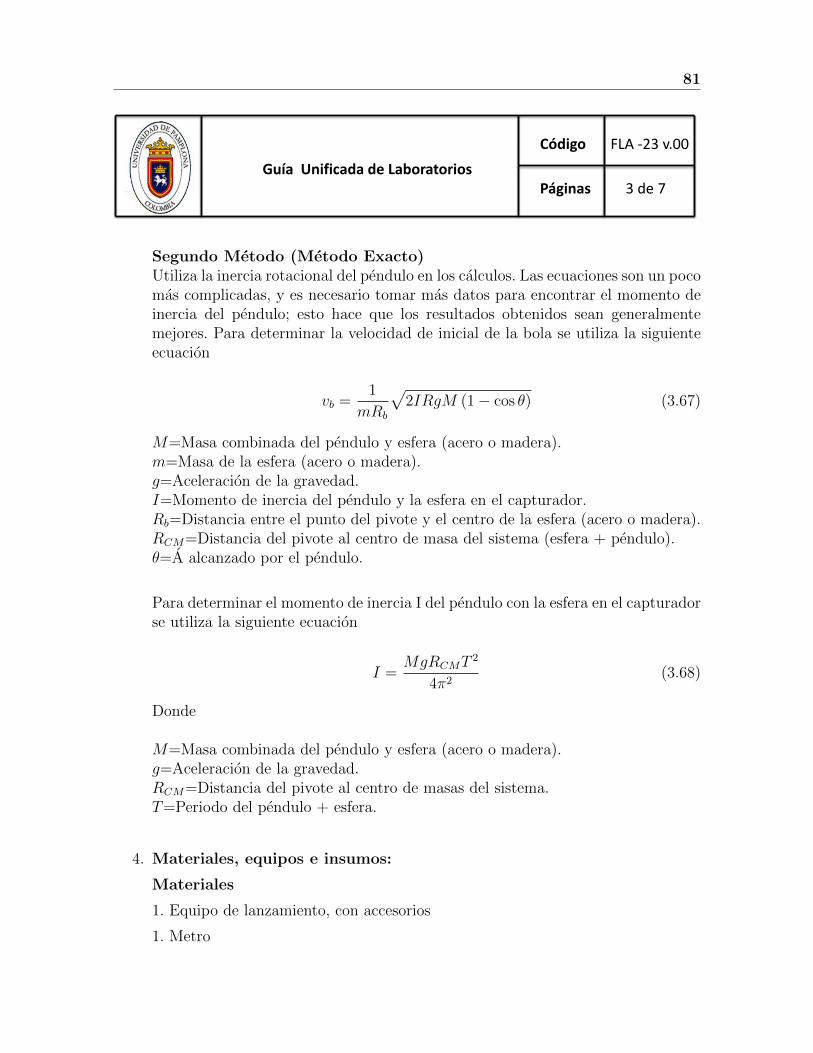
81
Guía Unificada de Laboratorios
Código
Páginas 3 de 7
FLA -23 v.00
Segundo Metodo (Metodo Exacto)Utiliza la inercia rotacional del pendulo en los calculos. Las ecuaciones son un pocomas complicadas, y es necesario tomar mas datos para encontrar el momento deinercia del pendulo; esto hace que los resultados obtenidos sean generalmentemejores. Para determinar la velocidad de inicial de la bola se utiliza la siguienteecuacion
vb =1
mRb
√2IRgM (1− cos θ) (3.67)
M=Masa combinada del pendulo y esfera (acero o madera).m=Masa de la esfera (acero o madera).g=Aceleracion de la gravedad.I=Momento de inercia del pendulo y la esfera en el capturador.Rb=Distancia entre el punto del pivote y el centro de la esfera (acero o madera).RCM=Distancia del pivote al centro de masa del sistema (esfera + pendulo).θ=A alcanzado por el pendulo.
Para determinar el momento de inercia I del pendulo con la esfera en el capturadorse utiliza la siguiente ecuacion
I =MgRCMT
2
4π2(3.68)
Donde
M=Masa combinada del pendulo y esfera (acero o madera).g=Aceleracion de la gravedad.RCM=Distancia del pivote al centro de masas del sistema.T=Periodo del pendulo + esfera.
4. Materiales, equipos e insumos:
Materiales
1. Equipo de lanzamiento, con accesorios
1. Metro
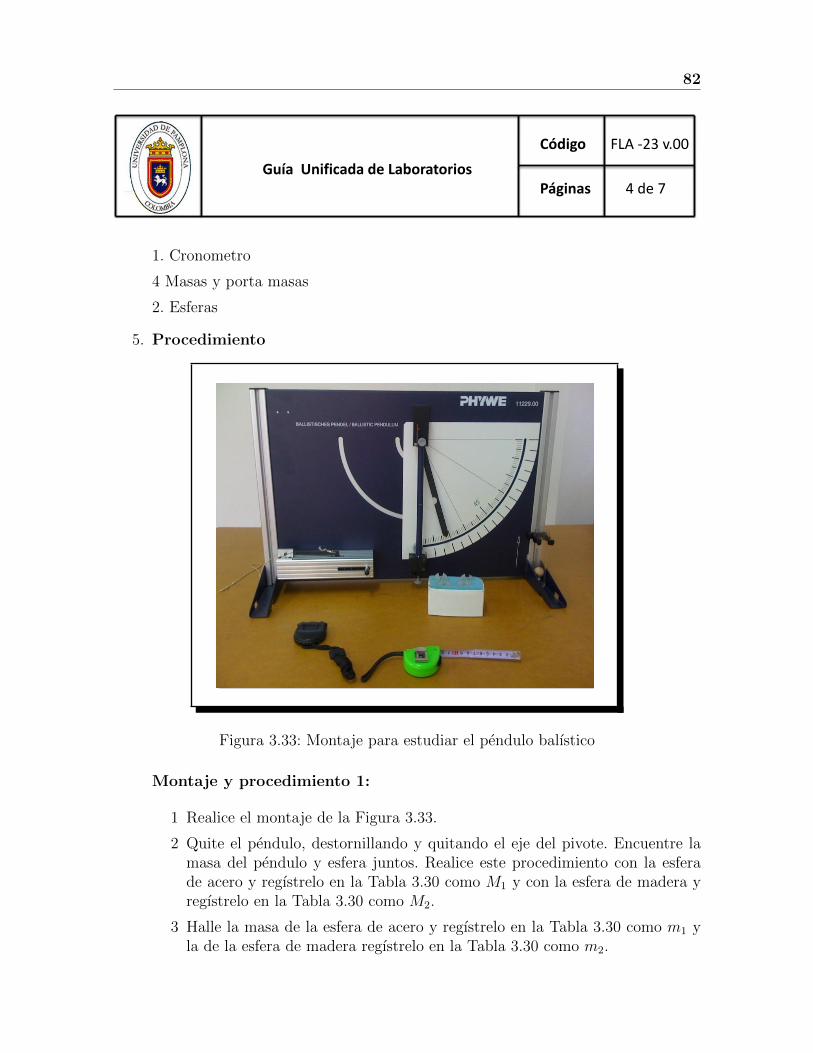
82
Guía Unificada de Laboratorios
Código
Páginas 4 de 7
FLA -23 v.00
1. Cronometro
4 Masas y porta masas
2. Esferas
5. Procedimiento
Figura 3.33: Montaje para estudiar el pendulo balıstico
Montaje y procedimiento 1:
1 Realice el montaje de la Figura 3.33.
2 Quite el pendulo, destornillando y quitando el eje del pivote. Encuentre lamasa del pendulo y esfera juntos. Realice este procedimiento con la esferade acero y regıstrelo en la Tabla 3.30 como M1 y con la esfera de madera yregıstrelo en la Tabla 3.30 como M2.
3 Halle la masa de la esfera de acero y regıstrelo en la Tabla 3.30 como m1 yla de la esfera de madera regıstrelo en la Tabla 3.30 como m2.

83
Guía Unificada de Laboratorios
Código
Páginas 5 de 7
FLA -23 v.00
4 Encuentre el centro de masas del pendulo con el proyectil dentro. Para elloutilice una cuerda haga un lazo con la cuerda y cuelgue el pendulo de lazohasta que encuentre el punto que se equilibre horizontalmente. Marque estepunto sobre el pendulo. Este es el centro de masa (ver Figura 3.34). Ustedpuede encontrar el centro de masa equilibrando el pendulo en el bordede una regla u objeto similar (para ello situe el pendulo sobre la mesa,perpendicularmente el borde. Vaya acercando el pendulo al borde hasta quese mantenga en equilibrio. Marque con una lınea la posicion de equilibrio ymida la distancia desde el eje de giro del pendulo). Anote los datos en laTabla 3.30. Mida la distancia del punto al pivote y anotelo como R(CM1) conla esfera de acero y como R(CM2) para la esfera de madera. Anote los datosen la Tabla 3.30.
Cuerda
Figura 3.34: Montaje para el calculo del centro de masa del pendulo
5 Re ensamble el pendulo y asegurese que quede bien hecho. Asegurese de queel indicador del angulo, este como se muestra en la Figura 3.33.
a) Dispare la catapulta. Tome y registre el angulo alcanzado.
6 Cargue la catapulta, luego coloque el indicador del angulo para orientar 2◦
o 3◦
menos del alcanzado en el paso 6. Esto eliminara la friccion causadapor el indicador en el arrastre del pendulo, ası el pendulo movera soloel indicador para los ultimos grados. Luego dispare la catapulta, y anoteel angulo alcanzado por el pendulo. Repita este procedimiento tres vecespara la esfera de acero y madera y anote los datos en la Tabla 3.31 y 3.32respectivamente.
Montaje y Procedimiento 2:

84
Guía Unificada de Laboratorios
Código
Páginas 6 de 7
FLA -23 v.00
1 Mida la distancia entre el punto del pivote y el centro de la esfera. Anoteesto como Rb en la Tabla 3.30.
2 Quite la catapulta de proyectiles para que el pendulo puede girar libremente.Con la esfera en el pendulo, dele un desplazamiento horizontal de 5
◦o
menos. Haciendo uso del cronometro tome el tiempo por lo menos de cincooscilaciones. Realice este procedimiento para las esferas de acero y registreeste dato como T1 y como T2 para la esfera de madera. Anotar los resultadosen la Tabla 3.30.
a) Calcule la velocidad aproximada de la esfera usando la ecuacion (3.67). Tantopara la esfera de acero como para la de madera. Mida y registre este anguloen la Tabla 3.30.
b) Calcule el valor de I utilizando la ecuacion (3.68). Realice este procedimientopara la esfera de acero y regıstrelo como I1 y para la esfera de madera yregıstrelo como I2. Anotar los resultados obtenidos en la Tabla 3.30.
c) Calcule la velocidad exacta para la esfera de acero y para la esfera demadera con la ecuacion (3.68). Anote los datos en las Tablas 3.31 y 3.32respectivamente.
6. Preguntas de control
a) ¿Hay otra manera de medir la velocidad del canon, para que usted puedaverificar sus resultados?
b) ¿Se simplificarıan los calculos si se conservara la energıa cinetica en la colisionentre la esfera y pendulo?
c) ¿Que porcentaje de energıa cinetica se ha perdido en la colision entre laesfera y el pendulo?
d) ¿Hay mas energıa o menos energıa transferida al pendulo cuando el penduloes girado de tal manera que la esfera golpee la parte de atras de este?
e) ¿Hay una diferencia significativa entre los valores calculados por los dosmetodos?
f ) ¿Que factores aumentarıan la diferencia entre estos dos resultados?
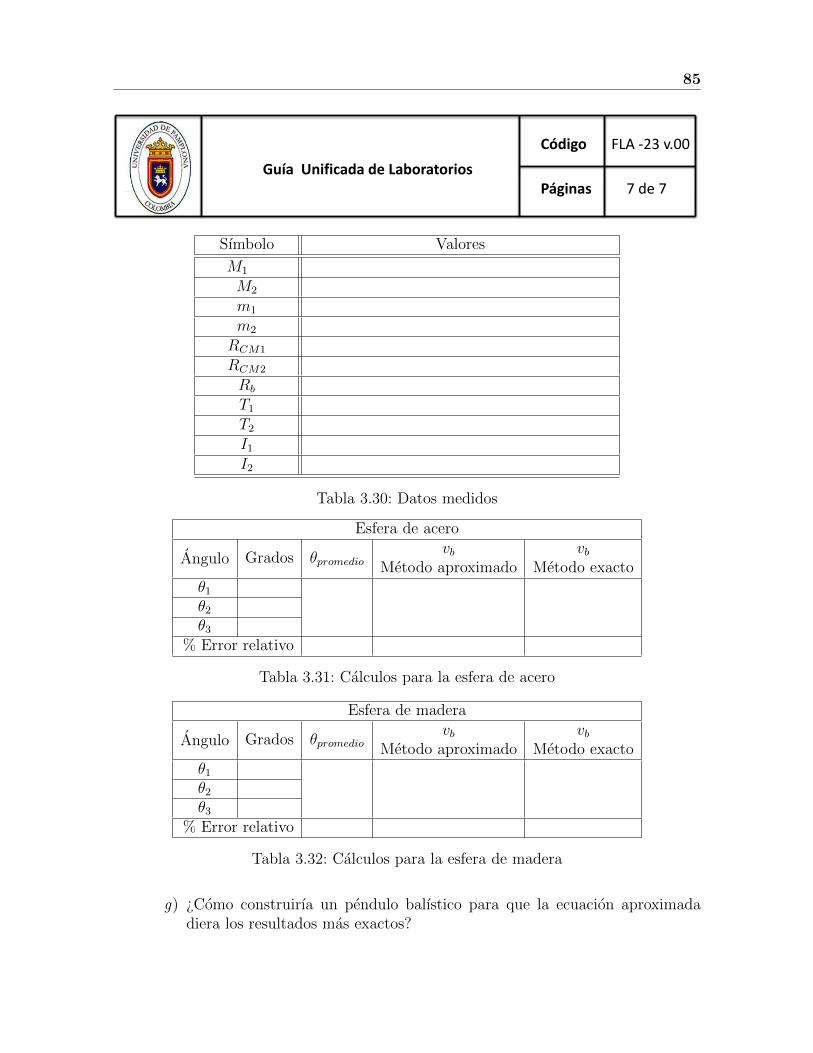
85
Guía Unificada de Laboratorios
Código
Páginas 7 de 7
FLA -23 v.00
Sımbolo Valores
M1
M2
m1
m2
RCM1
RCM2
Rb
T1
T2
I1
I2
Tabla 3.30: Datos medidos
Esfera de acero
Angulo Grados θpromediovb vb
Metodo aproximado Metodo exactoθ1
θ2
θ3
% Error relativo
Tabla 3.31: Calculos para la esfera de acero
Esfera de madera
Angulo Grados θpromediovb vb
Metodo aproximado Metodo exactoθ1
θ2
θ3
% Error relativo
Tabla 3.32: Calculos para la esfera de madera
g) ¿Como construirıa un pendulo balıstico para que la ecuacion aproximadadiera los resultados mas exactos?

86
Guía Unificada de Laboratorios
Código
Páginas 1 de 9
FLA -23 v.00
1. Titulo:
Conservacion del momentum en una colision elastica y coeficiente derestitucion en una colision inelastica
2. Objetivos
Determinar el momentum de un cuerpo.
Verificar el principio de conservacion del momentum lineal.
Verificar la conservacion de la energıa en una colision elastica.
Verificar que en una colision inelastica no se conserva la energıa.
Calcular el coeficiente de restitucion en una colision inelastica
3. Marco Teorico
Cuando un cuerpo de masa m1 se mueve con una velocidad ~v1, posee unmomentum lineal dado por ~p1 = m1~v1, para otro cuerpo de masa m2 que semueve con velocidad ~v2 posee un momentum lineal dado por ~p2 = m2~v2; si estosdos cuerpos chocan, los momentos despues del choque de cada uno de los cuerposson ~p′1 y ~p′2, el principio de conservacion del momentum establece que el momentumtotal antes del choque debe ser igual al momentum despues del choque es decir
m1~v1 +m2~v2 = m1~v′1 +m2~v
′2 (3.69)
Cuando el choque es elastico las energıas se conservan antes y despues del choquees decir
1
2m1~v
21 +
1
2m2~v
22 =
1
2m1~v
21′ +
1
2m2~v
22′ (3.70)
Si el choque es en una dimension por ejemplo en la direccion X, las velocidadesdespues del choque en funcion de las velocidades antes del choque se obtienencomo:
v′1 =(m1 −m2) v1 + 2m2v2
m1 +m2
(3.71)

87
Guía Unificada de Laboratorios
Código
Páginas 2 de 9
FLA -23 v.00
v′2 =(m2 −m1) v2 + 2m1v1
m1 +m2
(3.72)
La diferencia entre las velocidades despues del choque se obtiene restando las dosecuaciones anteriores, esto es:
v′2 − v′1 = − (v2 − v1) (3.73)
Lo que implica que las velocidades relativas antes y despues del choque poseenmagnitudes identicas. Cuando las colisiones no son elasticas la energıa no seconserva. El coeficiente de restitucion es una medida de la elasticidad de un choquey esta definido como el cociente negativo entre las velocidades relativas antes ydespues del choque, es decir
e = −v′2 − v′1v2 − v1
(3.74)
Este coeficiente es igual a 1 en el caso en el cual la colision es elastica, existeuna colision en la cual los dos cuerpos siguen juntos despues de la colision esta sedenomina plastica. Cuando la colision es inelastica la energıa antes y despues dela colision no se conserva por tal motivo si se define Q como la diferencia entrelas energıas antes y despues del choque este valor de Q puede ser negativo opositivo. Cuando la colision es inelastica las velocidades despues del choque sepueden calcular combinando la conservacion del momentum y la definicion delcoeficiente de restitucion:
v′1 =(m1 − em2) v1 + (1 + e)m2v2
m1 +m2
(3.75)
v′2 =(m2 − em1) v2 + (1 + e)m1v1
m1 +m2
(3.76)
Una forma de calcular el coeficiente de restitucion es observando que cuandose deja caer una esfera de goma (pelota loca) de masa m desde una altura H,esta rebota hasta una altura h menor que la altura desde la cual se deja caer, lo

88
Guía Unificada de Laboratorios
Código
Páginas 3 de 9
FLA -23 v.00
cual demuestra que en el choque con la tierra se pierde energıa es decir el choquees inelastico. La energıa en el punto donde se deja caer la pelota es:
EA = mgH (3.77)
la energıa al llegar al suelo es solo cinetica y esta dada por:
EB =1
2mv2 (3.78)
Figura 3.35: Montaje para determinar el coeficiente de restitucion
Estas dos energıas deben ser iguales, lo cual permite calcular la velocidad antesdel choque en funcion de la altura desde la cual se dejo caer.
v =√
2gH (3.79)

89
Guía Unificada de Laboratorios
Código
Páginas 4 de 9
FLA -23 v.00
De forma similar conociendo la altura hasta la cual llega la pelota se puededeterminar la velocidad con la cual reboto la pelota esta velocidad esta dadapor
v′ =√
2gh (3.80)
Notando que la tierra es un cuerpo mucho mas grande que la pelota se puededespreciar la velocidad de la tierra obteniendose el coeficiente de restitucion como
e =
√2gh√2gH
=
√h
H(3.81)
4. Materiales, equipos e insumos:
Equipos
1. Computador
1. Software measure(Phywe)
Materiales
2. Carritos con accesorios
4. Pesas
2. Fotoceldas (USB)
5. Procedimiento
Montaje Experimental I:Conservacion del momentum en una colisionelastica.
1 Realice el montaje de la Figura 3.36.
2 Ejecute el programa measure .
3 Configure el programa en la opcion photogate
4 Coloque las fotoceldas a una distancia de 70cm.
5 Para el caso v1 = 0 y v2 6= 0, coloque el carro 1 entre las dos fotoceldas ylance el carro 1 con ayuda del lanzador del equipo.

90
Guía Unificada de Laboratorios
Código
Páginas 5 de 9
FLA -23 v.00
Figura 3.36: Montaje para estudiar la colision elastica entre dos cuerpos
6 para el caso de v1 6= 0 y v2 6= 0 lance el carro 1 con su mano suavementey luego el carro 2 con el lanzador del equipo; esto en el caso de igualesdirecciones en el caso de direcciones contrarias lance el carro 1 y espere aque rebote en la banda al final del carril y luego lance el carro 2 con ayudadel lanzador del equipo.
7 Realice los procedimientos anteriores para las siguientes condiciones yregistre sus datos en las tablas (3.33-3.42) correspondientes a cada caso.
m1 > m2, v1 = 0 y v2 6= 0.
m1 < m2, v1 = 0 y v2 6= 0.
m1 > m2, v1 6= 0 y v2 6= 0 para iguales direcciones.
m1 < m2, v1 6= 0 y v2 6= 0 para iguales direcciones.
m1 = m2, v1 6= 0 y v2 6= 0 para iguales direcciones.
m1 > m2, v1 6= 0 y v2 6= 0 para direcciones contrarias.
m1 < m2, v1 6= 0 y v2 6= 0 para direcciones contrarias.
m1 = m2, v1 6= 0 y v2 6= 0 para direcciones contrarias.
Montaje Experimental II: Coeficiente de restitucion en una colisioninelastica.
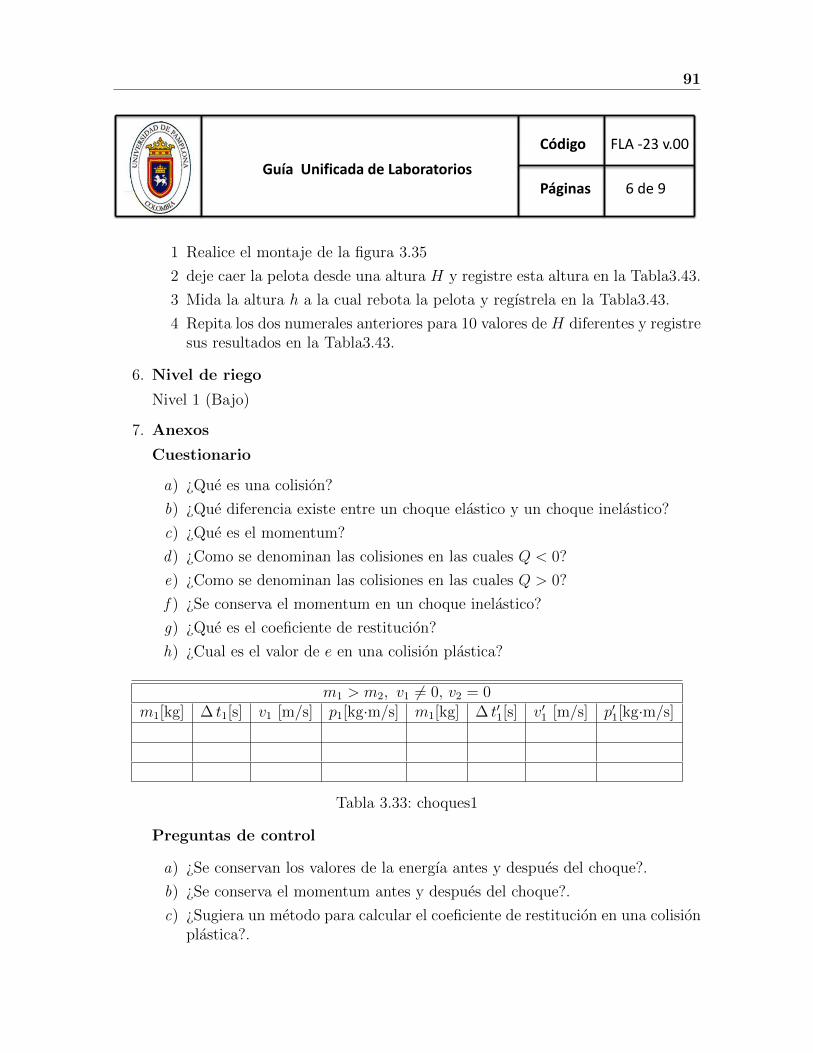
91
Guía Unificada de Laboratorios
Código
Páginas 6 de 9
FLA -23 v.00
1 Realice el montaje de la figura 3.35
2 deje caer la pelota desde una altura H y registre esta altura en la Tabla3.43.
3 Mida la altura h a la cual rebota la pelota y regıstrela en la Tabla3.43.
4 Repita los dos numerales anteriores para 10 valores de H diferentes y registresus resultados en la Tabla3.43.
6. Nivel de riego
Nivel 1 (Bajo)
7. Anexos
Cuestionario
a) ¿Que es una colision?
b) ¿Que diferencia existe entre un choque elastico y un choque inelastico?
c) ¿Que es el momentum?
d) ¿Como se denominan las colisiones en las cuales Q < 0?
e) ¿Como se denominan las colisiones en las cuales Q > 0?
f ) ¿Se conserva el momentum en un choque inelastico?
g) ¿Que es el coeficiente de restitucion?
h) ¿Cual es el valor de e en una colision plastica?
m1 > m2, v1 6= 0, v2 = 0m1[kg] ∆ t1[s] v1 [m/s] p1[kg·m/s] m1[kg] ∆ t′1[s] v′1 [m/s] p′1[kg·m/s]
Tabla 3.33: choques1
Preguntas de control
a) ¿Se conservan los valores de la energıa antes y despues del choque?.
b) ¿Se conserva el momentum antes y despues del choque?.
c) ¿Sugiera un metodo para calcular el coeficiente de restitucion en una colisionplastica?.

92
Guía Unificada de Laboratorios
Código
Páginas 7 de 9
FLA -23 v.00
m1 > m2, v1 6= 0, v2 = 0m2[kg] ∆ t′2[s] v′2 [m/s] p′2[kg·m/s]
Tabla 3.34: choques1
m1 > m2, v1 6= 0, v2 = 0p′1 + p′2 − p1[kg·m/s] E ′c − Ec[kg·m2/s2] E′c[kg·m2/s2] Ec[kg·m2/s2] e
Tabla 3.35: choques1
m1 < m2, v1 6= 0, v2 = 0m1[kg] ∆ t1[s] v1 [m/s] p1[kg·m/s] m1[kg] ∆ t′1[s] v′1 [m/s] p′1[kg·m/s]
Tabla 3.36: choques2
m1 < m2, v1 6= 0, v2 = 0m2[kg] ∆ t′2[s] v′2 [m/s] p′2[kg·m/s]
Tabla 3.37: choques2
m1 < m2, v1 6= 0, v2 = 0p′1 + p′2 − p1[kg·m/s] E ′c − Ec[kg·m2/s2] E′c[kg·m2/s2] Ec[kg·m2/s2] e
Tabla 3.38: choques2
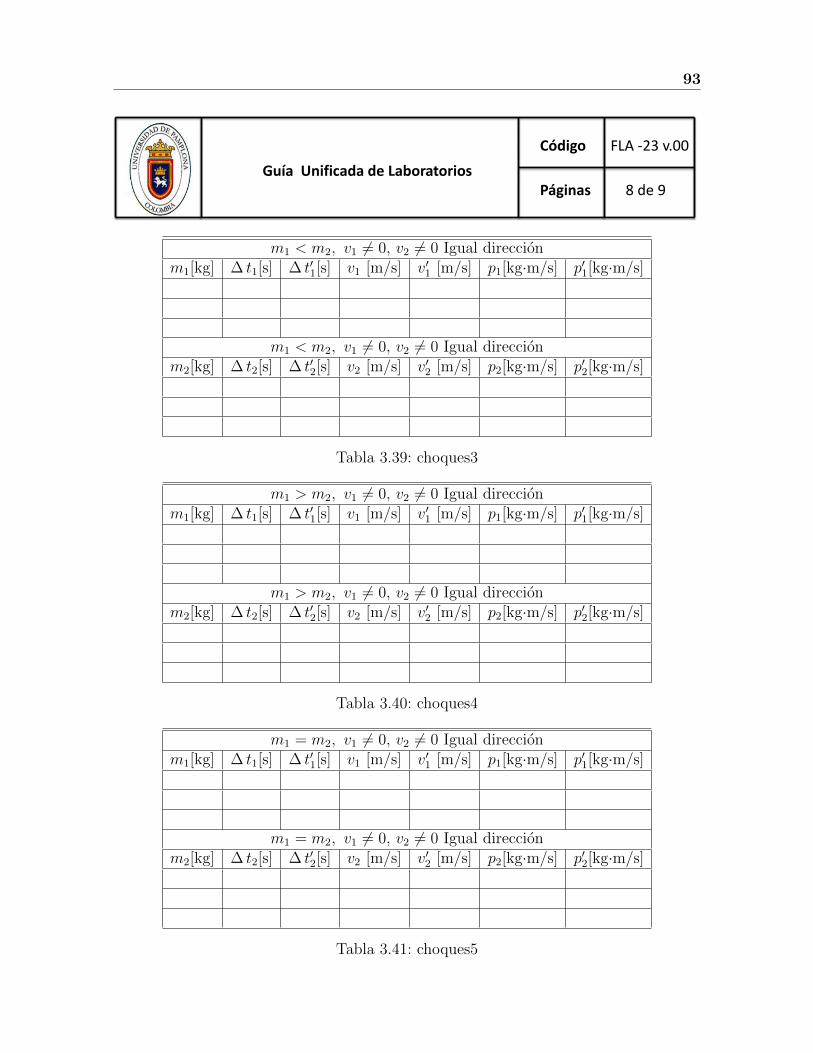
93
Guía Unificada de Laboratorios
Código
Páginas 8 de 9
FLA -23 v.00
m1 < m2, v1 6= 0, v2 6= 0 Igual direccionm1[kg] ∆ t1[s] ∆ t′1[s] v1 [m/s] v′1 [m/s] p1[kg·m/s] p′1[kg·m/s]
m1 < m2, v1 6= 0, v2 6= 0 Igual direccionm2[kg] ∆ t2[s] ∆ t′2[s] v2 [m/s] v′2 [m/s] p2[kg·m/s] p′2[kg·m/s]
Tabla 3.39: choques3
m1 > m2, v1 6= 0, v2 6= 0 Igual direccionm1[kg] ∆ t1[s] ∆ t′1[s] v1 [m/s] v′1 [m/s] p1[kg·m/s] p′1[kg·m/s]
m1 > m2, v1 6= 0, v2 6= 0 Igual direccionm2[kg] ∆ t2[s] ∆ t′2[s] v2 [m/s] v′2 [m/s] p2[kg·m/s] p′2[kg·m/s]
Tabla 3.40: choques4
m1 = m2, v1 6= 0, v2 6= 0 Igual direccionm1[kg] ∆ t1[s] ∆ t′1[s] v1 [m/s] v′1 [m/s] p1[kg·m/s] p′1[kg·m/s]
m1 = m2, v1 6= 0, v2 6= 0 Igual direccionm2[kg] ∆ t2[s] ∆ t′2[s] v2 [m/s] v′2 [m/s] p2[kg·m/s] p′2[kg·m/s]
Tabla 3.41: choques5

94
Guía Unificada de Laboratorios
Código
Páginas 9 de 9
FLA -23 v.00
m1 < m2, v1 6= 0, v2 6= 0 Direcciones opuestasm1[kg] ∆ t1[s] ∆ t′1[s] v1 [m/s] v′1 [m/s] p1[kg·m/s] p′1[kg·m/s]
m1 < m2, v1 6= 0, v2 6= 0 Direcciones opuestasm2[kg] ∆ t2[s] ∆ t′2[s] v2 [m/s] v′2 [m/s] p2[kg·m/s] p′2[kg·m/s]
Tabla 3.42: choques6
Coeficiente de restitucion
h[m] H[m]√h [√m]
√H[√m]
Tabla 3.43: Coeficiente de restitucion de una esfera de goma