Embed Size (px)
Citation preview
UNIVERSIDAD DE SEVILLADEPARTAMENTO DE INGENIERÍA ELÉCTRICA
OPTIMIZACIÓN DE FILTROS PASIVOS
PARA LA COMPENSACIÓN DE REACTIVA
Y MITIGACIÓN DE ARMÓNICOS
EN INSTALACIONES INDUSTRIALES
TESIS DOCTORAL
por
José María Maza Ortega
Ingeniero Industrial por la E.T.S. de Ingenieros Industrialesde la Universidad de Sevilla
Sevilla, Julio de 2001.


UNIVERSIDAD DE SEVILLADEPARTAMENTO DE INGENIERÍA ELÉCTRICA
OPTIMIZACIÓN DE FILTROS PASIVOS
PARA LA COMPENSACIÓN DE REACTIVA
Y MITIGACIÓN DE ARMÓNICOS
EN INSTALACIONES INDUSTRIALES
TESIS DOCTORAL
por
José María Maza Ortega
Ingeniero Industrial por la E.T.S. de Ingenieros Industrialesde la Universidad de Sevilla
Sevilla, Julio de 2001.

UNIVERSIDAD DE SEVILLADEPARTAMENTO DE INGENIERÍA ELÉCTRICA
OPTIMIZACIÓN DE FILTROS PASIVOS
PARA LA COMPENSACIÓN DE REACTIVA
Y MITIGACIÓN DE ARMÓNICOS
EN INSTALACIONES INDUSTRIALES
TESIS DOCTORAL
Autor: D. José María Maza OrtegaDirectores: D. Carlos Izquierdo Mitchell
D. Manuel Burgos Payán
TRIBUNAL CALIFICADOR
Presidente: D. Carlos Lemos AntunesSecretario: D. Manés Fernández CabanasVocales: D. Antonio Gómez Expósito
D. Manuel Pérez DonsiónD. Alfredo Quijano López
Obtuvo la cali�cación de Sobresaliente �Cum Laude� por unanimidad
Sevilla, 27 de Septiembre de 2001


A mis padres y a Pilar.


�La duda es la base del ingenio�Galileo Galilei

Agradecimientos
Sería injusto no comenzar las páginas de esta tesis con el reconocimien-to merecido a todos los que, de alguna manera u otra, han estado presentesen la elaboración de la misma. La dirección ejercida por D. Carlos IzquierdoMitchell y D. Manuel Burgos Payán ha sido ejemplar y ha supuesto la con-secución de un periodo formativo que empezó hace tiempo, cuando comencéa colaborar con el Departamento en mi último año de carrera. Sin su ayuda,cedida desinteresadamente, hubiera sido impensable estar ahora escribiendoestas líneas.
Por otra parte, también ha ayudado al desarrollo de la tesis el extraordina-rio ambiente de optimismo y trabajo que existe en el Departamento de Inge-niería Eléctrica de la Universidad de Sevilla, destacando no sólo las cualidadestécnicas de mis compañeros, sino también el factor humano, tan importanteen el trabajo en equipo.
Finalmente, quisiera agradecer a mi familia el apoyo y la ilusión que, desdeel inicio, me han dado para emprender este proyecto. Y a Pilar, por las muchashoras que le he robado del tiempo que deberíamos haber compartido.
Sevilla, Julio de 2001.

Índice General
1 Resumen y objetivos de la tesis 1
2 Introducción 52.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Los armónicos en el sistema eléctrico . . . . . . . . . . . . . . . 52.3 Potencia en sistemas de corriente alterna senoidal en régimen
permanente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3.1 Sistemas monofásicos . . . . . . . . . . . . . . . . . . . . 62.3.2 Sistemas trifásicos equilibrados . . . . . . . . . . . . . . 8
2.4 Potencia en sistemas de corriente alterna no senoidales en régi-men permanente . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4.1 Sistemas monofásicos . . . . . . . . . . . . . . . . . . . . 92.4.2 Sistemas trifásicos equilibrados . . . . . . . . . . . . . . 11
2.5 Compensación de reactiva y armónicos . . . . . . . . . . . . . . 122.6 Resumen del capítulo . . . . . . . . . . . . . . . . . . . . . . . . 13
3 Estado del Arte 153.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2 De�niciones de potencia reactiva en sistemas no senoidales . . . 16
3.2.1 Sistemas monofásicos . . . . . . . . . . . . . . . . . . . . 173.2.1.1 Dominio de la frecuencia . . . . . . . . . . . . . 17
3.2.1.1.1 Budeanu . . . . . . . . . . . . . . . . . 173.2.1.1.2 Zakikhani y Shepherd . . . . . . . . . 183.2.1.1.3 Sharon . . . . . . . . . . . . . . . . . . 193.2.1.1.4 Slonim y Van Wyk . . . . . . . . . . . 203.2.1.1.5 Czarnecki . . . . . . . . . . . . . . . . 21
3.2.1.2 Dominio del tiempo . . . . . . . . . . . . . . . 223.2.1.2.1 Fryze . . . . . . . . . . . . . . . . . . 223.2.1.2.2 Kusters y Moore . . . . . . . . . . . . 23
i
Índice General
3.2.1.2.3 Page . . . . . . . . . . . . . . . . . . . 243.2.1.3 Resumen de las descomposiciones de potencia . 25
3.2.2 Sistemas trifásicos . . . . . . . . . . . . . . . . . . . . . 253.2.2.1 Sistemas trifásicos de tres hilos . . . . . . . . . 26
3.2.2.1.1 Czarnecki . . . . . . . . . . . . . . . . 263.2.2.1.2 Akagi . . . . . . . . . . . . . . . . . . 293.2.2.1.3 Willems . . . . . . . . . . . . . . . . . 303.2.2.1.4 Ferrero y Superti-Furga . . . . . . . . 31
3.3 Filtros pasivos sintonizados . . . . . . . . . . . . . . . . . . . . 353.3.1 Steeper . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3.1.1 Phipps . . . . . . . . . . . . . . . . . . . . . . . 373.3.2 Kawann y Emanuel . . . . . . . . . . . . . . . . . . . . . 383.3.3 Mattavelli . . . . . . . . . . . . . . . . . . . . . . . . . . 383.3.4 Lin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.3.5 Czarnecki . . . . . . . . . . . . . . . . . . . . . . . . . . 413.3.6 Czarnecki y Ginn . . . . . . . . . . . . . . . . . . . . . . 44
3.4 Resumen del capítulo . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Compensación mediante �ltros pasivos 474.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.2 Planteamiento del problema . . . . . . . . . . . . . . . . . . . . 48
4.2.1 Potencia reactiva . . . . . . . . . . . . . . . . . . . . . . 484.2.2 Compensación de reactiva . . . . . . . . . . . . . . . . . 49
4.2.2.1 Carga conectada a un sistema de potencia decortocircuito in�nita . . . . . . . . . . . . . . . 52
4.2.2.2 Carga conectada a un sistema de potencia decortocircuito �nita . . . . . . . . . . . . . . . . 54
4.2.3 Algoritmo de punto interior . . . . . . . . . . . . . . . . 574.3 Optimización mediante técnicas de punto interior . . . . . . . . 58
4.3.1 Compensación con �ltro pasivo o condensador . . . . . . 594.3.1.1 Determinación de las resonancias . . . . . . . . 594.3.1.2 Formulación del problema . . . . . . . . . . . . 60
4.3.2 Compensación con banco de �ltros sintonizados . . . . . 634.3.2.1 Determinación de las resonancias . . . . . . . . 634.3.2.2 Resonancias: banco de dos �ltros . . . . . . . . 644.3.2.3 Determinación de las zonas factibles . . . . . . 674.3.2.4 Formulación del problema . . . . . . . . . . . . 70
4.3.3 Restricciones adicionales . . . . . . . . . . . . . . . . . . 734.3.3.1 Introducción de resonancias �cticias . . . . . . 74
ii
Índice General
4.3.3.2 Restricción de potencia reactiva en el armónicofundamental . . . . . . . . . . . . . . . . . . . . 77
4.4 Diseño del algoritmo de punto interior . . . . . . . . . . . . . . 784.5 Resumen del capítulo . . . . . . . . . . . . . . . . . . . . . . . . 81
5 Ejemplos de aplicación 835.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 835.2 Consideraciones generales . . . . . . . . . . . . . . . . . . . . . 855.3 Compensación con condensador . . . . . . . . . . . . . . . . . . 88
5.3.1 Distorsión de intensidad . . . . . . . . . . . . . . . . . . 895.3.2 Distorsión de tensión . . . . . . . . . . . . . . . . . . . . 925.3.3 Longitud de la línea . . . . . . . . . . . . . . . . . . . . 94
5.4 Compensación mediante �ltro sintonizado . . . . . . . . . . . . 965.4.1 Distorsión de tensión e intensidad . . . . . . . . . . . . . 985.4.2 Variación de la frecuencia de sintonización . . . . . . . . 101
5.5 Compensación mediante banco de �ltros sintonizados . . . . . . 1015.6 Aspectos numéricos del algoritmo . . . . . . . . . . . . . . . . . 107
5.6.1 Zonas factibles . . . . . . . . . . . . . . . . . . . . . . . 1075.6.2 Número de iteraciones . . . . . . . . . . . . . . . . . . . 1085.6.3 Función lagrangiana, error medio de dualidad y factor
de penalización . . . . . . . . . . . . . . . . . . . . . . . 1095.6.4 Evolución de la función objetivo con el número de itera-
ciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1105.7 Resumen del capítulo . . . . . . . . . . . . . . . . . . . . . . . . 110
6 Validación experimental 1136.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1136.2 Red de distribución estudiada . . . . . . . . . . . . . . . . . . . 1146.3 Instrumentación utilizada . . . . . . . . . . . . . . . . . . . . . 1246.4 Compensación con condensador . . . . . . . . . . . . . . . . . . 126
6.4.1 Interacción red-carga no lineal . . . . . . . . . . . . . . . 1296.5 Compensación con banco de �ltros sintonizados . . . . . . . . . 137
6.5.1 Optimización del banco de �ltros . . . . . . . . . . . . . 1376.5.2 Dimensionado de los componentes del �ltro . . . . . . . . 1436.5.3 Comparación de resultados teóricos y experimentales . . 1466.5.4 Evaluación de la compensación . . . . . . . . . . . . . . 153
6.6 Resumen del capítulo . . . . . . . . . . . . . . . . . . . . . . . . 154
iii

Índice General
7 Conclusiones y futuras líneas de investigación 1577.1 Resumen y conclusiones . . . . . . . . . . . . . . . . . . . . . . 1577.2 Sugerencias y futuras líneas de investigación . . . . . . . . . . . 159
A Modelo de la carga no lineal 161A.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161A.2 Simpli�caciones del modelo . . . . . . . . . . . . . . . . . . . . 162A.3 Análisis de los modos de funcionamiento del recti�cador . . . . . 163A.4 Cálculo de los instantes de conducción . . . . . . . . . . . . . . 169A.5 Aplicación de las condiciones de contorno . . . . . . . . . . . . . 170
A.5.0.1 Tensiones equilibradas . . . . . . . . . . . . . . 170A.5.0.2 Tensiones desequilibradas . . . . . . . . . . . . 172
A.6 Ajuste de la tension del condensador . . . . . . . . . . . . . . . 173A.7 Cálculo de los armónicos de intensidad . . . . . . . . . . . . . . 174A.8 Validación experimental del modelo . . . . . . . . . . . . . . . . 178
B Instrumentación eléctrica 185B.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185B.2 Transductores de tensión . . . . . . . . . . . . . . . . . . . . . . 185B.3 Transductores de intensidad . . . . . . . . . . . . . . . . . . . . 187B.4 Cuadro central de sensores . . . . . . . . . . . . . . . . . . . . . 189B.5 Tarjeta de adquisición de datos . . . . . . . . . . . . . . . . . . 190B.6 Descripción del instrumento virtual . . . . . . . . . . . . . . . . 192
iv

Índice de Figuras
2.1 Representación fasorial de la potencia activa y reactiva. . . . . . . . 72.2 Representación vectorial de la potencia activa, reactiva, distorsionan-
te y aparente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.1 Filtro pasivo sintonizado. . . . . . . . . . . . . . . . . . . . . . . 363.2 Circuito equivalente de un sistema de distribución. . . . . . . . . . . 393.3 (a) Diagrama de impedancia desde la carga. (b) Diagrama de admi-
tancia desde la fuente. . . . . . . . . . . . . . . . . . . . . . . . . 43
4.1 Esquema uni�lar y equivalente armónico de una instalación industrial. 504.2 Compensación de reactiva mediante métodos pasivos. . . . . . . . . 514.3 Descomposición ortogonal de la intensidad sobre la tensión. . . . . . 524.4 Valor e�caz de la intensidad del sistema en función del condensador. 564.5 Proceso iterativo de minimización con tensiones constantes. . . . . . 564.6 Fundamento de los métodos de punto interior de barrera logarítmica. 584.7 Posibles rectas de resonancia. . . . . . . . . . . . . . . . . . . . . . 654.8 Regiones que crea una resonancia en el caso bidimensional. . . . . . 674.9 Casos en los que no se produce intersección de las resonancias. . . . 694.10 Punto de diseño y resonancias.(a) Punto de diseño en el plano Cs�Ci.
(b) Impedancia equivalente desde la carga. . . . . . . . . . . . . . . 754.11 Introducción de resonancias �cticias y zona factible. . . . . . . . . . 764.12 Restricción de potencia reactiva en el armónico fundamental. . . . . 784.13 Cálculo del factor de avance. . . . . . . . . . . . . . . . . . . . . . 80
5.1 Esquema uni�lar de la red a estudiar. . . . . . . . . . . . . . . . . 855.2 Compensación con condensador. Valor e�caz de la intensidad frente
a la capacidad del condensador. . . . . . . . . . . . . . . . . . . . 885.3 Compensación con condensador. (a) Espectro armónico de intensi-
dad y tensión antes y después de la compensación. (b) Intensidad y
tensión de fase antes y después de la compensación. . . . . . . . . . 90
i
Índice de Figuras
5.4 Compensación con condensador. Capacidad del condensador ópti-
mo y valor e�caz de la intensidad relativo al inicial, respecto a la
distorsión de carga. . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.5 Compensación con condensador. Distorsión de tensión e intensidad
antes de la compensación y relativas después de la misma. . . . . . . 92
5.6 Compensación con condensador. (a) Intensidad después de compen-
sar respecto a distorsión de tensión e intensidad. (b) Distorsión de
intensidad después de compensar frente a distorsión de tensión e in-
tensidad. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
5.7 Compensación con condensador. Comparación de las curvas de va-
lor e�caz de intensidad frente a la capacidad del condensador para
longitudes de línea de: (a) 1 (p.u.). (b) 10 (p.u.). . . . . . . . . . . 94
5.8 Compensación con condensador. (a) Capacidad del condensador óp-
timo y valor e�caz de la intensidad relativo respecto a la longitud de
la línea en por unidad. (b) Distorsión de intensidad y tensión antes
y después de la compensación respecto a la longitud de la línea en
por unidad. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.9 Compensación con �ltro sintonizado. Valor e�caz de la intensidad
frente a la capacidad del condensador. . . . . . . . . . . . . . . . . 97
5.10 Filtro sintonizado. Espectro armónico de intensidad y tensión antes
y después de la compensación. . . . . . . . . . . . . . . . . . . . . 97
5.11 Compensación con �ltro sintonizado. Valor e�caz de intensidad fren-
te a distorsión de tensión e intensidad. . . . . . . . . . . . . . . . . 99
5.12 Compensación con �ltro sintonizado. Capacidad del condensador
óptimo frente a distorsión de tensión e intensidad. . . . . . . . . . . 100
5.13 Compensación con �ltro sintonizado. Distorsión de intensidad frente
a distorsión de tensión e intensidad. . . . . . . . . . . . . . . . . . 100
5.14 Compensación con �ltro sintonizado. Valor e�caz de intensidad y
capacidad del condensador óptimo frente a frecuencia de sintonización.101
5.15 Compensación con �ltro sintonizado. Distorsión de tensión e inten-
sidad frente a frecuencia de sintonización. . . . . . . . . . . . . . . 102
5.16 Compensación con banco de dos �ltros sintonizados. Valor e�caz de
intensidad frente a capacidad de condensadores. . . . . . . . . . . . 105
5.17 Compensación con banco de dos �ltros sintonizados. Curvas de nivel
del valor e�caz de intensidad. . . . . . . . . . . . . . . . . . . . . . 105
5.18 Compensación con banco de dos �ltros sintonizados. Rectas de reso-
nancia y localización de mínimos locales. . . . . . . . . . . . . . . . 106
ii
Índice de Figuras
5.19 Compensación con banco de dos �ltros sintonizados: 5 y 7. (a) Valor
e�caz de intensidad frente distorsión de intensidad y tensión. (b)
Distorsión de intensidad frente a distorsión de tensión e intensidad. . 1065.20 Compensación con banco de tres �ltros sintonizados: 5, 7 y 11. (a)
Valor e�caz de intensidad frente distorsión de intensidad y tensión.
(b) Distorsión de intensidad frente a distorsión de tensión e intensidad.1075.21 (a) Funciones objetivo y Lagrangiana frente a número de iteraciones.
(b) Factor de penalización frente a número de iteraciones. . . . . . . 1095.22 Curvas de nivel de la función lagrangiana. (a) Iteración 1. (b) Itera-
ción 3. (c) Iteración 5. (d) Iteración 10 . . . . . . . . . . . . . . . . 111
6.1 Sistema de distribución estudiado. . . . . . . . . . . . . . . . . . . 1146.2 Evolución de la secuencia positiva y negativa de la componente fun-
damental y de la secuencia negativa del quinto armónico de la tensión
de la red . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1156.3 Impedancias que simulan el comportamiento de la línea y transfor-
madores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1176.4 Carga lineal utilizada. (a) Resistencias. (b) Bobinas. . . . . . . . . 1186.5 Variador de velocidad de alterna utilizado. (a) Exterior. (b) Interior. 1196.6 Grupo motor-generador accionado por el variador de velocidad. . . . 1196.7 Intensidades absorbidas por la carga no lineal. . . . . . . . . . . . . 1206.8 Intensidad absorbida por la carga no lineal en el dominio de Park. . . 1216.9 Armónicos de la intensidad absorbida por la carga no lineal. (a)
Secuencia positiva. (b) Secuencia negativa. . . . . . . . . . . . . . . 1226.10 Efecto de la inductancia de conmutación en las intensidades del rec-
ti�cador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1236.11 Vista general del montaje realizado en el laboratorio. . . . . . . . . 1236.12 Transductor de tensión. (a) Exterior. (b) Interior. . . . . . . . . . 1246.13 Tablero de centralización de sensores de intensidad. . . . . . . . . . 1256.14 Ventana principal del instrumento virtual. . . . . . . . . . . . . . . 1266.15 Comparación de resultados teóricos y experimentales. (a) Valor e�-
caz de intensidad del sistema relativo al inicial. (b) Distorsión de
intensidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1276.16 Valores e�caces de intensidad de distintos armónicos en función de
la capacidad del condensador. . . . . . . . . . . . . . . . . . . . . 1286.17 Intensidades absorbidas por la fase a de la carga no lineal. (a) Sin
condensadores. (b) 2.5 kVAR de condensadores. . . . . . . . . . . . 129
iii

Índice de Figuras
6.18 Variación de los armónicos de la carga no lineal con la capacidad
del condensador. (a) Fundamental. (b) (b) Quinto armónico. (c)
Séptimo armónico. (d) Decimoprimer armónico. . . . . . . . . . . . 1306.19 Condensador. Comparación de las intensidades de la fase b. (a) Sin
condensador. (b) 0.5 kVAR. (c) 1.5 kVAR. (d) 2 kVAR. (e) 2.5 kVAR.
(f) 3 kVAR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1346.20 Condensador. Comparación de los armónicos en función del conden-
sador instalado. (a) Fundamental. (b) Quinto armónico (c) Séptimo
armónico. (d) Decimoprimer armónico. (e) Decimotercer armónico
(f) Decimoséptimo armónico. . . . . . . . . . . . . . . . . . . . . . 1356.21 Comparación de resultados teóricos y experimentales con interacción
red-carga no lineal. (a) Valor e�caz de intensidad del sistema relativo
al inicial. (b) Distorsión de intensidad. . . . . . . . . . . . . . . . . 1366.22 Representación de las restricciones con límites 4.5 y 6.5. . . . . . . . 1406.23 Representación de las restricciones con límites 4.2 y 6.2. . . . . . . . 1406.24 Ganancias después de la instalación del banco de �ltros.(a) Impedan-
cia desde la carga. (b) Admitancia desde la fuente. (c) Ganancia de
intensidades. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1426.25 Filtros pasivos instalados. . . . . . . . . . . . . . . . . . . . . . . 1446.26 Comparación de impedancias teóricas y experimentales. (a) Fil-
tros quinto y séptimo armónico. (b) Filtro decimoprimer armó-nico. (c) Banco de �ltros. . . . . . . . . . . . . . . . . . . . . . 145
6.27 Comparación de los armónicos de la intensidad de la carga no lineal.
(a) Secuencia positiva. (b) Secuencia negativa. . . . . . . . . . . . . 1486.28 Comparación de los armónicos de la intensidad del sistema. (a) Se-
cuencia positiva. (b) Secuencia negativa. . . . . . . . . . . . . . . . 1506.29 Comparación de intensidades teóricas y experimentales antes y des-
pués de la compensación. . . . . . . . . . . . . . . . . . . . . . . . 1526.30 Comparación de resultados experimentales antes y después de la com-
pensación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
A.1 Esquema del variador de velocidad utilizado . . . . . . . . . . . . . 161A.2 Simpli�caciones del modelo. (a) Carga desde el enlace de continua.
(b) Tensión del condensador constante. (c) Modelo simpli�cado �nal. 163A.3 Intensidades demandadas por el recti�cador no controlado. . . . . . 164A.4 Intervalo 1. Conducción fases b y c. . . . . . . . . . . . . . . . . . 165A.5 Intervalo 2. Conmutación fases a y c. . . . . . . . . . . . . . . . . 165A.6 Intervalo 3. Conducción fases a y b. . . . . . . . . . . . . . . . . . 167A.7 Intervalo 4. Conmutación fases b y c. . . . . . . . . . . . . . . . . 167
iv

Índice de Figuras
A.8 Intervalo 5. Conducción fases a y b. . . . . . . . . . . . . . . . . . 168A.9 Intervalo 6. Conmutación fases a y b. . . . . . . . . . . . . . . . . 168A.10 Intervalo 7. Conducción fases b y c. . . . . . . . . . . . . . . . . . 169A.11 Tensión de alimentación. (a) Tensiones simples. (b) Armónicos. . . . 179A.12 Intensidades absorbidas por el recti�cador calculadas por el modelo. . 180A.13 Comparación de intensidades teóricas y experimentales. . . . . . . . 181A.14 Comparación de resultados teóricos y experimentales. (a) Valor e�-
caz. (b) Fase. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181A.15 Comparación de resultados teóricos y experimentales. Secuencia in-
versa. (a) Valor e�caz. (b) Fase. . . . . . . . . . . . . . . . . . . . 182
B.1 Esquema del transductor de tensión. . . . . . . . . . . . . . . . 185B.2 Transductor de tensión. (a) Exterior. (b) Interior. . . . . . . . . . 187B.3 Tablero de centralización de sensores de intensidad. . . . . . . . . . 189B.4 Placas de alimentación de sensores y entrada/salida de la tarjeta de
adquisición de datos. . . . . . . . . . . . . . . . . . . . . . . . . . 190B.5 Cola circular de la tarjeta de adquisición de datos. . . . . . . . . 191B.6 Muestreo simultáneo de dos canales. . . . . . . . . . . . . . . . . 193B.7 Muestreo simultáneo de m canales. Referencia de todas las
muestras al mismo punto. . . . . . . . . . . . . . . . . . . . . . 193B.8 Ventana principal del instrumento virtual. . . . . . . . . . . . . . . 195
v

Índice de Tablas
3.1 Resumen de las descomposiciones de potencia. . . . . . . . . . . . . 25
5.1 Impedancias de la red de distribución de la Figura 5.1. . . . . . . . 855.2 Niveles máximos de armónicos permitidos en redes de distribución
públicas según EN50160. . . . . . . . . . . . . . . . . . . . . . . . 865.3 Contenido armónico de la intensidad no lineal. . . . . . . . . . . . . 875.4 Compensación con condensador. Resumen de resultados del proceso
de optimización. . . . . . . . . . . . . . . . . . . . . . . . . . . . 895.5 Compensación con �ltro sintonizado. Resumen de resultados del pro-
ceso de optimización. . . . . . . . . . . . . . . . . . . . . . . . . . 985.6 Compensación con banco de dos �ltros sintonizados. Resumen de
resultados del proceso de optimización. . . . . . . . . . . . . . . . . 1035.7 Compensación con banco de tres �ltros sintonizados. Resumen de
resultados del proceso de optimización. . . . . . . . . . . . . . . . . 1035.8 Compensación con banco de cuatro �ltros sintonizados. Resumen de
resultados del proceso de optimización. . . . . . . . . . . . . . . . . 1045.9 Zonas factibles a estudiar en función del número de �ltros. . . . . . . 1085.10 Número de iteraciones en función de los �ltros instalados para dis-
torsiones pequeñas: distorsión de tensión 0.8% e intensidad 20%. . . 1085.11 Número de iteraciones en función de los �ltros instalados para dis-
torsiones altas: distorsión de tensión 4% e intensidad 50%. . . . . . 108
6.1 Valores de impedancias de líneas y transformadores. . . . . . . . . . 1166.2 Valores aproximados de impedancias de líneas y transformadores. . . 1166.3 Valores de impedancia de las bobinas para distintas frecuencias. . . . 1176.4 Comparación de los resultados teóricos y experimentales. . . . . . . 1276.5 Comparación de los resultados teóricos y experimentales consideran-
do la interacción entre la red y el condensador. . . . . . . . . . . . . 1366.6 Armónicos de la tensión de alimentación. . . . . . . . . . . . . . . . 1386.7 Armónicos de la intensidad de la carga no lineal. . . . . . . . . . . . 139
i

Índice de Tablas
6.8 Comparación de dos bancos de �ltros. klim1 = 4:5, klim2 = 6:5. . . . 1416.9 Dimensionado previo de los �ltros pasivos. . . . . . . . . . . . . . . 1436.10 Dimensionado �nal de los �ltros pasivos. . . . . . . . . . . . . . . . 1446.11 Medida de la impedancia de los �ltros. . . . . . . . . . . . . . . . . 1466.12 Comparación de resultados teóricos y experimentales. . . . . . . 1476.13 Comparación de las intensidades de la carga no lineal. Secuencia
positiva. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1496.14 Comparación de las intensidades de la carga no lineal. Secuencia
negativa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1496.15 Comparación de las intensidades del sistema. Secuencia positiva. . . 1516.16 Comparación de las intensidades del sistema. Secuencia negativa. . . 1516.17 Evaluación de la compensación realizada. . . . . . . . . . . . . . 1536.18 Comparación de resultados experimentales antes y después de la com-
pensación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
A.1 Constantes de la intensidad ia(t) . . . . . . . . . . . . . . . . . . 175A.2 Constantes de la intensidad ib(t) . . . . . . . . . . . . . . . . . . 175A.3 Impedancias utilizadas. . . . . . . . . . . . . . . . . . . . . . . . . 178A.4 Armónicos de la tensión de alimentación. . . . . . . . . . . . . . . . 179A.5 Resultados del modelo. . . . . . . . . . . . . . . . . . . . . . . . . 179A.6 Comparación de resultados teóricos y experimentales. Secuencia po-
sitiva. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182A.7 Comparación de resultados teóricos y experimentales. Secuencia ne-
gativa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
B.1 Especi�caciones técnicas de los transductores de tensión. . . . . . . 186B.2 Especi�caciones técnicas de los transductores de intensidad de núcleo
continuo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188B.3 Especi�caciones técnicas de los transductores de intensidad de núcleo
partido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188B.4 Especi�caciones técnicas de la tarjeta de adquisición de datos. . . . . 190
ii
Capítulo 1
Resumen y objetivos de la tesis
El origen del uso de la energía eléctrica se remonta al �nal del siglo XIX, en elque las primeras máquinas producían corriente continua para alimentar los sis-temas de alumbrado público. Poco tiempo después comenzaron a desarrollarselos sistemas de corriente alterna a partir de la invención del transformador ydel motor de inducción. Durante un tiempo, el tradicional sistema de corrientecontinua, defendido por personajes de la talla de Edison y Hopkinson, compitiócon el nuevo de corriente alterna, apoyado por Westinghouse y Tesla, que fueel que �nalmente se impuso, constituyendo la base de los sistemas eléctricosde potencia actuales.
La ventaja de los sistemas de corriente alterna frente a los de continua re-sidía en la posibilidad de transmitir energía a grandes distancias con pérdidasreducidas mediante la utilización de transformadores. Sin embargo, uno delos principales inconvenientes de dichos sistemas es la aparición de la potenciareactiva, consumida por las cargas que necesitaban para su funcionamiento lacreación de un campo magnético, tales como los propios transformadores y losmotores de inducción. En este sentido, si bien la potencia reactiva es necesariapara generar el campo magnético (sin el cual el receptor no podría funcionar),su media es nula a lo largo de un periodo, por lo que no puede transformarseen trabajo. Desde este punto de vista, el transporte de la potencia reactivadisminuye el rendimiento de la distribución de la energía eléctrica. Esta dismi-nución se debe a que parte de la intensidad que circula por el sistema, la que esutilizada para alimentar un campo magnético, no puede ser transformada entrabajo pero genera pérdidas Joule. Este problema se ha solventado tradicio-nalmente mediante la instalación de baterías de condensadores en los sistemaseléctricos, cuya misión es el aporte local de la potencia reactiva, aumentándosede esta forma el rendimiento de la transmisión.
1

Capítulo 1 Resumen y objetivos de la tesis
El crecimiento que la utilización de la energía eléctrica ha experimentadoen la industria se ha visto re�ejado en una mejora y adaptación constante delos receptores eléctricos a los nuevos requerimientos productivos, cuyo objeti-vo �nal ha sido siempre un incremento de la e�ciencia. En este sentido, devital importancia ha sido el desarrollo que ha experimentado la electrónicade potencia, y en particular, su aplicación al campo de los accionamientoseléctricos para conseguir aplicaciones de velocidad variable. Sin embargo, lautilización de la electrónica de potencia tiene como inconveniente la apariciónde armónicos en el sistema de potencia, debido a que se trata de cargas nolineales.
Los problemas asociados a los armónicos son bien conocidos [5], [41] afec-tando a un amplio conjunto de aspectos relacionados con el sistema eléctrico,que abarca desde el aumento de las pérdidas del sistema, interferencias elec-tromagnéticas, disparo intempestivo de protecciones, etc., hasta fenómenos deresonancia. Sin lugar a dudas, de entre todos ellos, este último es de los másproblemáticos. Las resonancias se producen precisamente por la existencia enla red eléctrica de condensadores para la compensación de la potencia reactiva.Dichas resonancias generan una ampli�cación de las intensidades armónicasexistentes en el sistema cuyo efecto puede ser devastador, debiendo ser evita-das a toda costa. Además de estos efectos perjudiciales, el sistema eléctricocon la aparición de armónicos ya no está en régimen permanente senoidal, porlo que la de�nición clásica de potencia reactiva no es de aplicación.
Por otra parte, un análisis actual del sector de la energía eléctrica cons-tata que la calidad de suministro constituye hoy en día uno de los objetivosprimordiales en las actividades de generación, transporte y distribución. Losprocesos de liberarización del sector eléctrico llevados a cabo en multitud depaíses, entre los que se encuentra España, conllevan un cambio radical en laconcepción del mismo. Desde esta nueva perspectiva, la energía eléctrica puedeverse como un producto que las compañías distribuidoras ofrecen al consumi-dor �nal. Si bien este vínculo existente entre distribuidores y consumidoresya existía previamente, éste adquiere otra signi�cación a partir del proceso deliberarización. En de�nitiva, el distribuidor tiene la obligación de entregar laenergía bajo unas condiciones regladas por las autoridades [24]. Estas condi-ciones se pueden dividir en dos grandes grupos: continuidad de suministro ycalidad de la onda de tensión. Idealmente, la tensión en los sistemas eléctri-cos de potencia debería ser senoidal. Sin embargo, existen circunstancias quesacan al sistema de estas condiciones de funcionamiento ideal, afectando, portanto, a la calidad del suministro eléctrico, entre las que se pueden destacar[77]: variaciones de frecuencia, variaciones lentas de tensión, �uctuaciones de
2
Resumen y objetivos de la tesis
tensión (�icker), huecos de tensión e interrupciones breves, impulsos de ten-sión, desequilibrios de tensión y distorsión armónica. Dado que los niveles dedistorsión de tensión en las redes públicas de distribución de energía eléctricaestá limitado [13], es lógico que, de igual forma, las compañías suministradoraselaboren recomendaciones y guías técnicas para la conexión de clientes pertur-badores a la red. De esta forma, limitando el contenido armónico producidopor estos, se puede ofrecer una tensión con características admisibles por lanormativa vigente a otros consumidores dentro de la red de distribución.
Por tanto, ya sea para cumplir la normativa vigente o para evitar los pro-blemas asociados a la presencia de armónicos, es de vital importancia reducir elcontenido armónico producido por las cargas no lineales en las redes eléctricas,recurriéndose para ello normalmente a técnicas de �ltrado de los armónicosemitidos. Los sistemas de �ltrado de armónicos pueden dividirse en dos gran-des grupos: activo y pasivo. Los primeros han tenido un gran desarrollo enlas dos últimas décadas, debido a la rápida evolución conseguida por la elec-trónica de potencia, prueba de ello es la amplia bibliografía existente [42], [2],[7], [80], [8], [57], [69], [72], [88]. El principio de funcionamiento de este tipode �ltrado se basa en la inyección de corrientes armónicas de igual valor a lasexistentes en el sistema pero con fase contraria, de forma que la resultantees nula. El �ltrado pasivo, práctica habitual en las instalaciones industrialescon problemas de armónicos, consiste en la inserción en el sistema de �ltrosformados por bobinas dispuestas en serie con condensadores, de forma que sesintonizan a un determinado armónico que se desea eliminar.
Si bien los �ltros pasivos se han venido utilizando en la industria para miti-gar el contenido armónico que éstas vierten a las redes públicas de distribución,no existen procedimientos claros de diseño, sino más bien un conjunto de re-glas extraídas de la experiencia, que conllevan normalmente al diseño de losmismos por procedimientos de prueba y error. Muy recientemente han apare-cido en la literatura especializada criterios de diseño sistemáticos, que si bienconstituyen un avance con respecto a las técnicas existentes, no han tenido encuenta ciertos aspectos que hacen que el problema del diseño de los �ltros noesté solucionado completamente.
Por estos motivos, el objeto de la presente tesis se centra en el diseño de�ltros pasivos, pretendiéndose desarrollar en este trabajo un método sistemá-tico para el diseño de los mismos. Además de conseguir una reducción de losarmónicos existentes en la red, el objetivo que se pretende es la minimizaciónde la potencia reactiva demandada por la instalación industrial.
3

Capítulo 1 Resumen y objetivos de la tesis
La tesis se ha estructurado en los capítulos que se enumeran a continuación:
� En el Capítulo 2 se realiza una revisión de las de�niciones de potenciapara regímenes senoidales y no senoidales, poniendo de mani�esto larelación existente entre éstas y los armónicos.
� En el Capítulo 3 se presenta una revisión de las principales teorías depotencia reactiva para regímenes no senoidales, así como de los métodosde diseño de �ltros pasivos.
� En el Capítulo 4 se formula el método propuesto en esta tesis para el dise-ño de �ltros pasivos. El método desarrollado se basa en la minimizaciónde la potencia reactiva. La función a minimizar tiene como inconvenien-te su carácter no lineal, asociado a la presencia de resonancias, lo cualha llevado a un exhaustivo estudio de la misma. El procedimiento secompleta con la inclusión de unas restricciones adicionales que tienen encuenta aspectos prácticos del diseño de �ltros pasivos.
� El Capítulo 5 contiene una aplicación del método desarrollado a una redde distribución concreta para poner de mani�esto la in�uencia de losdistintos parámetros que intervienen en el proceso de optimización.
� En el Capítulo 6 se presenta la validación experimental del método dediseño desarrollado. Para ello fue necesario el montaje en el laboratoriode una red de distribución a escala, en la que la carga generadora dearmónicos es un variador de velocidad.
� Por último, el Capítulo 7, recoge las principales conclusiones del trabajodesarrollado en el ámbito de la presente tesis, proponiendo asimismofuturos desarrollos y líneas de investigación.
Además los capítulos que brevemente se han expuesto, se incluye la biblio-grafía utilizada y dos apéndices:
� Apéndice A. En este apéndice se presenta el modelo de la carga no linealutilizada en la validación experimental. Dicha carga es un variador develocidad para un motor de inducción. El objeto del modelo es el cál-culo de los armónicos de intensidad demandados por la carga. En dichomodelo se tienen presentes tanto los desequilibrios como los armónicosde las tensiones de alimentación al recti�cador.
� Apéndice B. Se realiza una descripción detallada de la instrumentacióneléctrica utilizada en la validación experimental de la tesis.
4
Capítulo 2
Introducción
2.1 Introducción
La corriente alterna senoidal trifásica constituye la base de la producción,transporte y distribución de la energía eléctrica. Hasta hace relativamentepoco tiempo el sistema eléctrico podía describirse con su�ciente aproximaciónmediante un modelo lineal, por lo que ante tensiones senoidales las intensidadesque circulan son también senoidales y de la misma frecuencia. Sin embargo,con el aumento de la utilización de la electrónica de potencia, no sólo en elámbito industrial sino también en el doméstico, esta a�rmación ha dejado deser cierta. Dada una tensión senoidal de una frecuencia, pueden existir en elsistema eléctrico intensidades de otras frecuencias, llamadas armónicas, quepueden in�uir de forma notable en los procesos industriales.
A modo de revisión, se van a presentar en este capítulo las expresiones depotencia, la de�nición del factor de potencia y la compensación de potenciareactiva para cada uno de los regímenes citados anteriormente, con la intenciónde mostrar la estrecha relación existente entre la compensación de reactiva ylos armónicos.
2.2 Los armónicos en el sistema eléctrico
En general, las máquinas eléctricas son productoras de armónicos [5],[41]. Sinembargo, al ser su contenido pequeño, suelen considerarse como cargas lineales.Los armónicos aparecen en la red cuando existen cargas que son no lineales.El gran aporte de armónicos viene producido por el uso de la electrónica depotencia. En la industria, las principales fuentes de armónicos son consecuencia
5

Capítulo 2 Introducción
de las aplicaciones de velocidad variable para motores de corriente continuay alterna. En edi�cios de o�cinas y viviendas la iluminación y las fuentesde alimentación presentes en la mayor parte de los electrodomésticos son lasprincipales causas de aparición de armónicos.Los armónicos producen multitud de problemas cuando están presentes en elsistema eléctrico:
� Aumento de pérdidas en la transmisión y distribución de la energía, nosólo por el aumento del valor e�caz de la intensidad, sino por el efectopelicular.
� Aumento de pérdidas en los transformadores de potencia. Los transfor-madores que van a ser utilizados en instalaciones que tienen contenidoarmónico son desclasi�cados mediante un índice (factor K ) de forma quedisminuye su potencia asignada al aumentar la distorsión armónica a lacual está expuesto, [26], [6].
� Disminución del rendimiento de motores, no sólo por el aumento de laspérdidas sino porque los armónicos de secuencia inversa provocan camposque giran en sentido contrario al del fundamental.
� Calentamiento excesivo del neutro por la circulación de terceros armóni-cos de secuencia homopolar.
� Interferencias.
Por estos motivos ha habido necesidad de establecer normativas que impon-gan límites a los contenidos armónicos de tensión e intensidad en el sistemaeléctrico, considerando no sólo tasas de distorsión globales sino también dearmónicos individuales [13],[73].
2.3 Potencia en sistemas de corriente alterna se-noidal en régimen permanente
2.3.1 Sistemas monofásicos
Si un receptor lineal está sometido a una tensión senoidal, la intensidad queconsume es también senoidal y de la misma frecuencia que la tensión:
u(t) =p2U sin!t i(t) =
p2I sin (!t+ ') (2.1)
6

Introducción
siendo ' el ángulo de la carga. La potencia instantánea que absorbe el receptorse puede expresar como:
p(t) = u(t)i(t) = UI cos'(1� cos(2!t)) + UI sin' sin(2!t) (2.2)
Como se puede observar en (2.2), la potencia instantánea está formada pordos términos en cuadratura:
� El primer sumando tiene una media no nula que coincide con el valormedio de la potencia. A este valor medio se le denomina potencia activa:
P =1
T
Z t0+T=2
t0�T=2
p(t)dt = UI cos' (2.3)
� El segundo sumando tiene una media nula. El valor de pico de estesumando es llamado potencia reactiva:
Q = UI sin' (2.4)
Agrupando de forma diferente (2.2) se llega a la ecuación:
p(t) = UI cos'� UI cos(2!t+ ') (2.5)
que consta de dos términos: uno constante, potencia activa, y otro �uctuante.La amplitud de este último se denomina potencia aparente:
S = UI =pP 2 +Q2 (2.6)
Las potencias de�nidas suelen representarse en diagramas fasoriales comoel de la Figura 2.1.
Figura 2.1: Representación fasorial de la potencia activa y reactiva.
Por otra parte, la ecuación (2.2) muestra el carácter oscilatorio de la po-tencia instantánea, si bien su origen tiene diferentes signi�cados físicos [29],[28]:
7

Capítulo 2 Introducción
� Las oscilaciones de potencia del primer sumando de (2.2) son intrínsecas ala corriente alterna y se producen siempre que existe un �ujo de potenciaeléctrica que puede ser convertida en trabajo.
� Las oscilaciones del segundo sumando se producen siempre y cuandoexista un intercambio de energía entre componentes del sistema eléctricoque sean capaces de almacenarla (bobinas y condensadores). En el casopropuesto, dicho intercambio se efectúa entre la fuente y el receptor.Si la fuente no es ideal, es decir que tiene una impedancia en serie,este intercambio de energía que no produce trabajo estará provocandounas pérdidas en la parte resistiva de la impedancia que disminuyen elrendimiento del sistema.
La relación entre la potencia activa y la aparente se denomina factor de poten-cia e indica la efectividad con la que un receptor está consumiendo potencia.Para sistemas en regimen permanente senoidal, el factor de potencia coincidecon el ángulo de desfase de tensión e intensidad, que a su vez es el ángulo dela carga:
FP =P
S= cos' (2.7)
2.3.2 Sistemas trifásicos equilibrados
Para los sistemas trifásicos, la potencia instantánea total es la suma de las po-tencias para cada una de las fases, cuya expresión es similar a (2.2), particula-rizando los valores de tensión e intensidad de cada fase. Si el sistema trifásicoes además equilibrado, las tensiones e intensidades constituyen sendos sistemasde magnitudes que están desfasadas 2�=3 radianes entre sí, resultando que lapotencia instantánea es constante:
p(t) = pa(t) + pb(t) + pc(t) = 3UI cos' (2.8)
donde U es el valor e�caz de la tensión simple, I es el valor e�caz de la inten-sidad de una de las fases y ' es el ángulo de la carga, o el desfase existenteentre la tensión simple y la intensidad de fase. La potencia activa se de�neentonces como:
P = 3UI cos' (2.9)
Sin embargo, aunque el total es constante, existen oscilaciones de potencia encada una de las fases por separado, por lo que la potencia reactiva y la aparentese de�nen de la siguiente forma:
Q = 3UI sin' (2.10)
8

Introducción
S = 3UI (2.11)
La de�nición del factor de potencia en estas condiciones es idéntica a la dadapara sistemas monofásicos y vuelve a estar relacionado con el desfase entre lastensiones e intensidades de la carga.
2.4 Potencia en sistemas de corriente alterna nosenoidales en régimen permanente
2.4.1 Sistemas monofásicos
En el régimen permanente no senoidal, las tensiones e intensidades puede serdescompuestas en series de Fourier:
u(t) =p2Xk
Uk sin(k!t+ �h) i(t) =p2Xk
Ik sin(k!t+ �h + 'h) (2.12)
por lo que la potencia instantánea es:
p(t) =Xk
UkIk cos'k(1� cos(2k!t+ �k)) +
+Xk
UkIk sin'k sin(2k!t+ �k) +
+ 2Xk 6=h
Xh
UkIh cos(k!t+ �k) cos(h!t+ �k + 'k) (2.13)
La potencia activa, que es la media de la potencia instantánea, es:
P =Xk
UkIk cos'k (2.14)
El resto de términos corresponden a oscilaciones de la potencia que no tienenun claro sentido físico. Mientras que en régimen permanente senoidal las de�-niciones de potencia, así como su signi�cado físico, están bien establecidas, noocurre lo mismo con magnitudes no senoidales, para los que existen multitudde interpretaciones.
Siguiendo lo establecido en [30],[33],[32] se tienen las siguientes de�nicionesde potencias:
9

Capítulo 2 Introducción
� Potencia activa:P =
Xk
UkIk cos'k (2.15)
� Potencia reactiva:Q =
Xk
UkIk sin'k (2.16)
� Potencia fasorial:S =
pP 2 +Q2 (2.17)
� Potencia aparente:SU = UI (2.18)
U =
sXk
U2k I =
sXk
I2k (2.19)
� Potencia distorsionante:
D =qS2U � S2 (2.20)
Dando a las potencias activa, reactiva y distorsionante una dirección en elespacio según los ejes de un triedro, se tiene una representación grá�ca que semuestra en la Figura 2.2.
Figura 2.2: Representación vectorial de la potencia activa, reactiva, distorsionante
y aparente.
La de�nición del factor de potencia vuelve a ser la relación existente entrela potencia activa y la aparente:
FP =P
S(2.21)
10

Introducción
Tal y como se mostrará en el siguiente capítulo, estas de�niciones de poten-cia tienen poca utilidad, pues carecen de un signi�cado físico claro y no daninformación acerca de como mejorar el factor de potencia.
2.4.2 Sistemas trifásicos equilibrados
En el régimen permanente no senoidal, la potencia instantánea trifásica noes constante. Si se de�ne una constante m que adquiere los valores 0, 1 y 2para las fases a, b y c respectivamente, dicha potencia se puede expresar de lasiguiente forma:
p(t) = uaia + ubib + ucic = 3Xk
UkIk cos'k +
+ 2Xm
Xk 6=h
Xh
UkIh sin(k(!t+2�
3m) + �k) sin(h(!t+
2�
3m) + �h + 'h)
(2.22)
La potencia activa es el valor medio de la expresión anterior:
P = 3Xk
UkIk cos'k (2.23)
Las de�niciones de las potencias reactiva y distorsionante trifásicas, de acuerdocon [30], corresponden a la suma de las correspondientes para las fases:
Q =Xm
Qm D =Xm
Dm (2.24)
A partir de estas potencias, se de�ne la potencia aparente aritmética y lavectorial como:
SA =Xl=a;b;c
qP 2l +Q2
l +D2l (2.25)
SV =Xl=a;b;c
pP 2 +Q2 +D2 (2.26)
Resulta evidente que el valor del factor de potencia dependerá de la de�niciónde potencia aparente seleccionada.
11
Capítulo 2 Introducción
2.5 Compensación de reactiva y armónicos
Para aumentar el rendimiento del transporte de la energía eléctrica en el ré-gimen permanente senoidal es conveniente que los receptores tengan un factorde potencia unidad.
Tradicionalmente, el factor de potencia unidad se logra en estos casos me-diante un compensador pasivo, batería de condensadores, que aporte una po-tencia reactiva igual a la demandada por el receptor. También se puede llegara este estado mediante un compensador activo, sin elementos almacenadoresde energía, debido a que la reactiva es una energía que se intercambia entrelas fases, [1], [83].
Sin embargo, en condiciones no senoidales, se tienen dos problemas a lahora de efectuar la compensación de potencia reactiva, que pone de mani�estola relación entre ésta y los armónicos:
� La de�nición de potencia reactiva en estas condiciones no está consen-suada. En este sentido, se debería usar una de�nición que, además detener un signi�cado físico claro, aportase datos para el diseño del com-pensador que maximice el factor de potencia y el valor �nal de éste. Amodo de ejemplo, la de�nición de potencia reactiva dada anteriormenteno cumple con ninguno de estas características, [30].
� En caso de utilizar elementos pasivos para la compensación, normalmentebaterías de condensadores, pueden aparecer en el sistema eléctrico reso-nancias serie o paralelo, perjudiciales para un funcionamiento correctodel sistema [5], [41], [33].
Para mitigar el efecto de estas resonancias se pueden utilizar bancos de �ltrospasivos sintonizados a la frecuencia de un armónico determinado. Los �ltrospasivos, además de aportar la potencia reactiva necesaria, deben contribuir adisminuir la distorsión de tensión e intensidad en el sistema. Sin embargo, lautilización de los mismos no está exenta de la aparición de resonancias, ya quepueden existir variaciones de los parámetros del �ltro por envejecimiento desus componentes, [85], y de la impedancia de red, debido a recon�guraciones.
12
Introducción
2.6 Resumen del capítulo
En este capítulo se ha realizado una breve descripción de los conceptos depotencia para sistemas monofásicos y trifásicos con magnitudes senoidales yno senoidales. El objeto de dicha revisión se fundamenta en la necesidad demostrar la poca solidez de las de�niciones de potencia reactiva para regímenesno senoidales como extensión de las de�niciones clásicas para regímenes senoi-dales. Por otra parte, se ha mostrado la estrecha relación existente entre lapotencia reactiva y los armónicos desde dos puntos de vista complementarios:
� La de�nición de potencia reactiva, por extensión del caso senoidal, debeser tal que su compensación conlleve un aumento del factor de potencia.
� La utilización de condensadores para compensar la potencia reactiva yaumentar así el factor de potencia puede provocar peligrosas resonanciasen el sistema, además de aumentar las distorsiones de tensión e intensi-dad.
Puesto que la extrapolación del caso senoidal no ofrece resultados satis-factorios cuando se aplica a sistemas con magnitudes distorsionadas, se hacenecesario estudiar convenientemente las diferentes de�niciones de potencia re-activa, así como las alternativas existentes para proceder a su compensación ya la mitigación de armónicos.
13

Capítulo 2 Introducción
14
Capítulo 3
Estado del Arte
3.1 Introducción
La calidad de suministro eléctrico es de vital importancia en nuestros días.Debido a que el contenido armónico de la tensión disponible en los suministrosde las compañías distribuidoras está regulada dentro de unos límites, se debeponer una cota a los niveles de intensidad armónica inyectada en el sistema porcargas no lineales. Una reducción de los armónicos se puede lograr mediantemejoras efectuadas en las cargas no lineales generadoras de los mismos, deforma que la distorsión de la intensidad consumida es menor, o bien mediante�ltrado. Por otra parte, el conjunto de cargas lineales y no lineales de unaindustria tiene un determinado factor de potencia que debe ser compensadoidealmente a la unidad para disminuir las pérdidas de distribución de la energíaeléctrica y evitar así los recargos que de otra manera impondría la compañíasuministradora.
La de�nición de potencia reactiva en régimen no senoidal, tal y como seindica en el Capítulo 2, es un tema que no está unanimemente aceptado to-davía en nuestros días. Las de�niciones de potencia reactiva adoptadas porinstituciones como el IEEE, basada en la teoría desarrollada por Budeanu, y laIEC, basada en el trabajo de Fryze, son poco satisfactorias, dado que ni tienenun signi�cado físico claro ni aportan datos relevantes para diseñar dispositivosque ayuden a aumentar el factor de potencia.
Si desea aumentarse el factor de potencia mediante la adición de baterías decondensadores, extrapolando del caso senoidal, aumentan los armónicos tantode tensión como de intensidad y además crece el riesgo de resonancia. Porestos motivos, para aumentar el factor de potencia en sistemas no senoidales,se utilizan �ltros, ya sean pasivos, activos o híbridos. Independientemente del
15

Capítulo 3 Estado del Arte
sistema de �ltrado utilizado, éste deberá tener una doble función: aumentar elfactor de potencia tanto como sea posible y reducir el contenido de armónicosinyectados a la red a un valor adecuado.
Por estos motivos, en el presente capítulo se hace una revisión de las teoríasde potencia reactiva en régimen no senoidal más relevantes y de las principa-les técnicas de diseño de �ltros pasivos, objeto de esta tesis, presentes en laliteratura especializada.
3.2 De�niciones de potencia reactiva en siste-mas no senoidales
Las teorías que van a ser revisadas se pueden agrupar dentro de dos grandesgrupos dependiendo del tipo de sistema al cual se aplican: monofásico o trifá-sico. Dentro de cada uno de éstos se puede establecer otra división en funcióndel dominio en el que han sido formuladas: frecuencia y tiempo.
Todas ellas tiene en común que intentan realizar una descomposición orto-gonal de intensidades similar al caso senoidal. Dada una magnitud periódicafi(t) de frecuencia fundamental !, se puede expresar mediante su desarrollode Fourier:
fi = Fi0 +ReXn
F inejn!t (3.1)
donde F in es un fasor cuyo módulo es el valor e�caz del armónico n:
F in = Finej�n =
p2
T
Z T
0
fi(t)e�jn!tdt (3.2)
Se dice que una magnitud fj(t) periódica es ortogonal a fi(t), si su productoescalar es nulo, lo cual se puede expresar en el dominio del tiempo y de lafrecuencia:
(fi; fj) =1
T
Z T
0
fifjdt =
= Fi0Fj0 +ReXn
F inF�jn = 0 (3.3)
Si la suma de las magnitudes anteriores forma una tercera f(t), se veri�cala siguiente relación de valores e�caces:
F 2 = F 2i + F 2
j (3.4)
16

Estado del Arte
De esta forma, la reducción del valor e�caz fi(t) o fj(t) conlleva una disminu-ción del valor e�caz de f(t).
Si se realiza una descomposición ortogonal de intensidad de forma que,mediante algún tipo de compensación, se reduzca alguna de sus componentes,al tener cada una de dichas intensidades una potencia asociada se incrementael valor del factor de potencia.
3.2.1 Sistemas monofásicos
3.2.1.1 Dominio de la frecuencia
La expresión de la potencia activa, común para todas las descomposiciones depotencia que van a ser analizadas, en el dominio de la frecuencia es:
P =Xk
UkIk cos'k (3.5)
Igualmente la potencia aparente es:
S = UI =
sXk
U2k
sXk
I2k (3.6)
3.2.1.1.1 Budeanu
La descomposición de Budeanu [10] es la adoptada en [30] por el IEEE. Lapotencia reactiva se de�ne por la expresión:
Q =Xk
UkIk sin'k (3.7)
De esta forma, se de�ne la potencia distorsionante como:
D =pS2 � P 2 �Q2 (3.8)
Esta de�nición de potencia reactiva no guarda ninguna relación con el �ujode potencia que se establece entre la fuente y la carga con media nula. Ade-más, no da información acerca de como mejorar el factor de potencia de lacarga, [17], [20], [16], [65], [66], [67], [68], [28]. De hecho, es posible que alcompensar la potencia reactiva siguiendo la de�nición anterior, el factor depotencia disminuya, debido a que se produzca un incremento de la potenciadistorsionante.
17

Capítulo 3 Estado del Arte
La debilidad de esta teoría se basa en una inadecuada descomposición de in-tensidades y de�nición de potencia reactiva. Las intensidades activa y reactivade�nen unas potencias cuya suma es la potencia instantánea:
ia =p2Xk
Ik cos'k sin(k!t+ �k)) pa(t) (3.9)
ir =p2Xk
Ik sin'k cos(k!t+ �k)) pr(t) (3.10)
p(t) = pa(t) + pr(t) (3.11)
La potencia instantánea pr(t) que resulta de la intensidad reactiva ir(t) estáformada por dos sumandos:
pr =Xk
UkIk sin'k sin 2(k!t+ �k) +
+ 2Xk
Xl 6=k
UkIl sin'l sin(k!t+ �k) sin(l!t+ �l) (3.12)
Denominar potencia reactiva al primer término de (3.12) es inadecuado. Deesta forma, la potencia distorsionante, como magnitud derivada de P , Q y S,carece de sentido.
3.2.1.1.2 Zakikhani y Shepherd
El caso más general que se puede plantear en un sistema que presenta ar-mónicos de tensión e intensidad es aquel en el que pueden existir órdenes dearmónicos de tensión que no coincidan con los de intensidad, órdenes de armó-nicos de tensión e intensidad coincidentes y órdenes de armónicos de intensidadque no estén presentes en los de tensión. Cada uno de estos órdenes de ar-mónicos establecen los conjuntos M , N y P respectivamente, en función de losque se realiza la siguiente descomposición de la potencia aparente, [65]-[68]:
S2 = S2R + S2
X + S2D (3.13)
S2R =
Xk2N
U2k
Xk2N
I2k cos2 'k (3.14)
S2X =
Xk2N
U2k
Xk2N
I2k sin2 'k (3.15)
S2D =
Xk2N
U2k
Xk2P
I2k +Xk2M
U2k
Xk2P
I2k +Xk2M
U2k
Xk2N
I2k (3.16)
18

Estado del Arte
El único término compensable mediante elementos almacenadores de energíaes SX ; minimizando éste se alcanzará el máximo factor de potencia.
Por otra parte, aunque las formulaciones de los distintos componentes dela potencia puede resultar parecida a los desarrollados por Budeanu, no existeen realidad ninguna conexión entre SR y la potencia activa P , ni entre SX yla potencia reactiva Q, ni entre SD y la potencia distorsionante D.
3.2.1.1.3 Sharon
Esta descomposición, [62] y [63], se basa en la anterior de Zakikhani y Shep-herd, [65]-[68]. Sharon indica que la función SX es discontinua, por lo que sepuede llegar a valores del factor de potencia mayores que el inicial después deque la compensación haya sido realizada.
Si de nuevo se engloban a los armónicos de tensión e intensidad en losconjuntos designados en la sección anterior (N armónicos comunes a tensión eintensidad, M armónicos de tensión no presentes en intensidad y P armónicosde intensidad no presentes en la tensión), se propone:
S2 = P 2 + S2Q + S2
C (3.17)
P =Xk2N
UkIkcos'k (3.18)
SQ = U
(Xk2N
I2kcos2'k
)1=2
(3.19)
SC = fXk2M
U2k
Xk2N
I2kcos2'k + U2
Xk2P
I2k +
+1
2
Xk2N
Xl2N
(UkIl cos'l � UlIk cos'k)2g1=2 (3.20)
donde P es la potencia activa, SQ es la potencia reactiva en cuadratura y SCes la potencia reactiva complementaria. El término SQ es igual a SX , de�nidoen [65], salvo un sumando que pertenece a la potencia SD. Sin embargo, segúnShepherd y Zakikhani, este sumando no tiene naturaleza de potencia reactiva,ya que no puede ser compensado mediante un elemento pasivo almacenadorde energía, siendo sólo un arti�cio matemático para asegurar la continuidadde la potencia reactiva [67].
19

Capítulo 3 Estado del Arte
3.2.1.1.4 Slonim y Van Wyk
Estos autores, [70] y [71], critican la falta de signi�cado físico de las compo-nentes de potencia de�nidas en [10], si bien no dejan claro en sus trabajosel signi�cado de las mismas, limitándose sólo a establecer unas expresionesmatemáticas que ligan aquellas con los parámetros de la carga.
Considérese el caso más general, en el que los armónicos de tensión estáncontenidos en los conjuntos M y N y los de intensidad en N y P. Para losarmónicos comunes a tensión e intensidad, N , se puede de�nir una impedanciapara cada orden de armónico en dicho conjunto:
Zk = R + jXk =Uk
Ikk 2 N (3.21)
a partir de las cuales se expresan las potencias relacionadas con los armónicoscontenidos en N : activa, reactiva y distorsionante:
P 2 = R2Xk2N
I4k (3.22)
Q2 =Xk2N
X2kI
4k (3.23)
D2c =
Xk2N
Xl2N
(Xk �Xl)2I2kI
2l (3.24)
Tal y como se deduce de estas ecuaciones, si sólo existen armónicos en elconjunto N , la potencia distorsionante tiene una carácter puramente reactivo.Los componentes de potencia resultantes de términos cruzados entre armóni-cos de diferentes conjuntos, que se agrupan bajo la potencia distorsionanteimaginaria Di, pueden dividirse en una parte activa y otra reactiva:
D2i = R2
hXk2M
Xl2N
I2kI2l +
Xk2M
Xl2P
I2kI2l +
Xk2N
Xl2P
I2kI2l
i+
+Xk2M
Xl2N
X2kI
2kI
2l +
Xk2M
Xl2P
X2kI
2kI
2l +
Xk2N
Xl2P
X2kI
2kI
2l =
= P 2i +Q2
i (3.25)
Con estas de�niciones, la potencia aparente se puede expresar o bien a par-tir de las potencias activa, reactiva, distorsionante y distorsionante imaginaria,o, dado que para cada una de ellas se ha hecho una descomposición en parte
20

Estado del Arte
activa y reactiva, como suma de términos activos y reactivos:
S2 = P 2 +Q2 +D2c +D2
i =
= P 2 + P 2i +Q2 +D2
c +Q2i =
= P 2� +Q2
� (3.26)
La teoría expuesta no aporta puntos de vista alternativos a los presentadoshasta el momento, y arrastra de�ciencias de otras anteriores:
� El signi�cado físico de los diferentes términos de la potencia reactiva ydistorsionante no es claro.
� No se indican qué términos pueden ser compensados para aumentar elfactor de potencia.
3.2.1.1.5 Czarnecki
Este autor propone una descomposición ortogonal de intensidades en un sis-tema en el que los armónicos de tensión pertenecen a un grupo Nu y los deintensidad a Ni, de forma que existen armónicos en Ni no presentes en Nu [15],[16].
Si se separan en ig(t) a los armónicos de intensidad no contenidos en latensión, y en io(t) a los contenidos en tensión e intensidad, la siguiente des-composición es ortogonal, pues se trata de armónicos de diferente frecuencia:
i(t) = io(t) + ig(t) (3.27)
La intensidad io(t) se puede descomponer en otras intensidades que son orto-gonales entre sí. Se de�ne una intensidad activa que tiene la misma forma deonda que la tensión:
ia(t) = Geu(t) (3.28)
Ge es la conductancia equivalente que consumiría la potencia que está deman-dando la carga con la tensión u(t):
Ge =P
U2(3.29)
La intensidad restante, i � ia, puede ser descompuesta en dos, dispersa yreactiva:
is(t) =p2Xk
(Gk �Ge)Uk cos(k!t) (3.30)
21

Capítulo 3 Estado del Arte
ir(t) =p2Xk
BkUk sin(k!t) (3.31)
Todos estos componentes de intensidad son ortogonales, por lo que se veri�ca:
I2 = I2a + I2r + I2s + I2g (3.32)
Así, la disminución de uno de ellos implica una disminución del valor e�caz de laintensidad e�caz, aumentando el factor de potencia. Multiplicando los valorese�caces anteriores por el de la tensión se obtienen las potencias asociadas acada una de la intensidades, que toman el nombre de éstas.
Los signi�cados físicos de las intensidades y sus potencias asociadas seexplican de la siguiente forma:
� Intensidad activa. Es la necesaria para transferir la potencia activa Phasta la carga.
� Intensidad dispersa. Centrándose en un armónico in(t), la intensidadque es necesaria para transportar la potencia activa a la conductanciaequivalente es la intensidad activa, pero en realidad está circulando otracantidad:
iRn =p2GnUn cos(n!t) (3.33)
La diferencia entre las dos magnitudes es la intensidad dispersa que,aunque no contribuye al transporte de potencia activa, aumenta el valore�caz de la intensidad y disminuye el factor de potencia. Por otra parte,dado que los valores Ge�Gn pueden ser positivos o negativos, no puedencompensarse mediante un elemento pasivo.
� Intensidad reactiva. Aparece siempre que haya un desfase entre la tensióny la intensidad de la carga. Esta intensidad puede minimizarse medianteelementos pasivos.
3.2.1.2 Dominio del tiempo
3.2.1.2.1 Fryze
La principal objeción de Fryze, [34]-[35], a la teoría desarrollada por Budeanues la necesidad de realizar la descomposición de las tensiones e intensidadesantes de calcular la potencia reactiva. Su de�nición de potencia reactiva es laadoptada por la Comisión Electrotécnica Internacional (IEC ).
Fryze descompone la intensidad en dos componentes ortogonales:
i(t) = ia(t) + ib(t) (3.34)
22

Estado del Arte
El primero de ellos es el responsable del transporte de la potencia activa,teniendo la misma forma de onda de la tensión:
ia =P
U2u(t) (3.35)
ib = i� ia (3.36)
Al ser estas dos intensidades ortogonales los valores e�caces satisfacen la si-guiente ecuación:
I2 = I2a + I2b (3.37)
La potencia reactiva es la asociada a la intensidad ib:
Q = UIb ) S2 = P 2 +Q2 (3.38)
El principal inconveniente de esta de�nición es que Q no tiene ninguna relacióncon las propiedades de la carga, por lo que ni se tiene ninguna información depor qué existe ni de cómo se puede compensar [16].
3.2.1.2.2 Kusters y Moore
Se realiza una descomposición de la potencia aparente en potencia activa,reactiva y reactiva residual [44]. Tomando la tensión como referencia se tienenlas siguientes intensidades:
� Activa. Es la que tiene la misma forma que la tensión y es la responsablede la aparición de la potencia activa:
ip =P
U2u =
�1
T
Z T
0
uidt
�u
U2Ip =
P
U=
�1
T
Z T
0
uidt
�1
U(3.39)
� Reactiva. Es la que resulta de restar la intensidad activa a la total:
iq = i� ip Iq =qI2 � I2p (3.40)
Esta intensidad resultante se puede dividir en dos componentes: induc-tiva o capacitiva y residual. Las componentes inductiva y capacitiva sede�nen de la siguiente forma:
� Inductiva. Componente que tiene la misma forma de onda que laintensidad que circula por una bobina con la misma tensión aplica-da. Denominando �u a la integral inde�nida de la tensión y �U a suvalor e�caz:
iql =
�1
T
Z T
0
�uidt
��u�U2
Iql =
�1
T
Z T
0
�uidt
�1�U
(3.41)
23

Capítulo 3 Estado del Arte
� Capacitiva. Esta intensidad tiene la misma forma de onda que laque circula por un condensador sometido a la tensión aplicada. Sise llama _u a la derivada de la tensión y _U a su valor e�caz:
iqc =
�1
T
Z T
0
_uidt
�_u_U2
Iqc =
�1
T
Z T
0
_uidt
�1_U
(3.42)
� Residual. Se obtiene de restar a la intensidad total la intensidad activay reactiva. Puede ser inductiva o capacitiva, en función de la intensidadreactiva elegida:
iqlr = i� ip � iql Iqlr =qI2 � I2p � I2ql (3.43)
iqcr = i� ip � iqc Iqcr =qI2 � I2p � I2qc (3.44)
Las intensidad reactiva, ya sea inductiva o capacitiva, puede ser compen-sada completamente mediante un condensador o una bobina. De hecho, losvalores del condensador coinciden con aquellos calculados usando una adecuadaformulación de la potencia reactiva en el dominio de la frecuencia. El problemafundamental que se presenta es que las de�niciones dadas se circunscriben a lacompensación del factor de potencia mediante bobinas o condensadores [56] y[16].
3.2.1.2.3 Page
La de�nición que realiza de las intensidades es idéntica a la propuesta porKusters y Moore, si bien añade ciertos aspectos que éstos no tienen en cuentapara el caso de compensación de potencia reactiva mediante elementos pasivosen sistemas con tensión no senoidal [56]. Para este caso, la intensidad reactivainductiva y capacitiva no tienen por qué ser iguales, por lo que es posiblemejorar la compensación de potencia reactiva utilizando una de�nición de estaintensidad que contenga a la vez a ambos términos:
iq = adu
dt+ b
Zudt+ ir (3.45)
donde los coe�cientes a y b se eligen de forma que el valor e�caz de la intensidadresidual se minimice. Los coe�cientes toman por tanto este valor:
a =Iqc_U
b =Iql�U
(3.46)
24
Estado del Arte
De esta forma se consigue una posibilidad de compensación de energía reactivamediante elementos pasivos. Si los coe�cientes a y b anteriormente calculadosson negativos, los valores del condensador y bobina en paralelo que se tienenque añadir para anular la componente reactiva son:
C = �a L = �1
b(3.47)
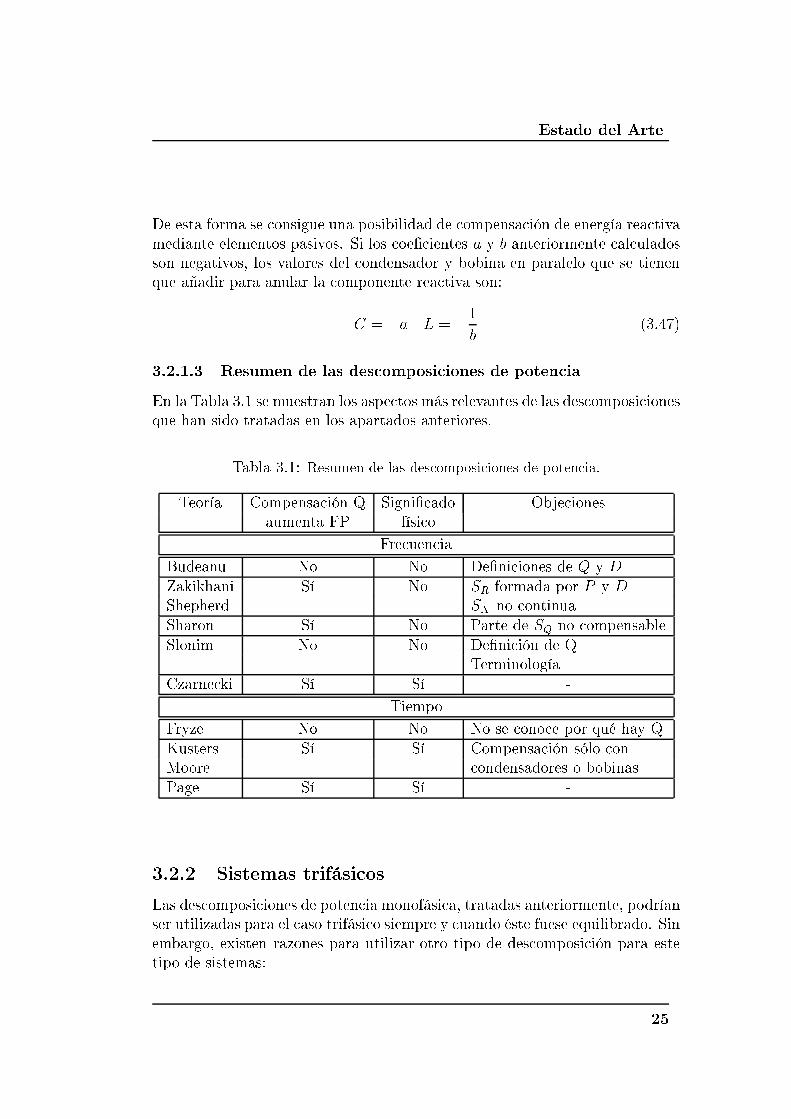
3.2.1.3 Resumen de las descomposiciones de potencia
En la Tabla 3.1 se muestran los aspectos más relevantes de las descomposicionesque han sido tratadas en los apartados anteriores.
Tabla 3.1: Resumen de las descomposiciones de potencia.
Teoría Compensación Q Signi�cado Objecionesaumenta FP físico
Frecuencia
Budeanu No No De�niciones de Q y DZakikhani Sí No SR formada por P y DShepherd SX no continuaSharon Sí No Parte de SQ no compensableSlonim No No De�nición de Q
TerminologíaCzarnecki Sí Sí -
Tiempo
Fryze No No No se conoce por qué hay QKusters Sí Sí Compensación sólo conMoore condensadores o bobinasPage Sí Sí -
3.2.2 Sistemas trifásicos
Las descomposiciones de potencia monofásica, tratadas anteriormente, podríanser utilizadas para el caso trifásico siempre y cuando éste fuese equilibrado. Sinembargo, existen razones para utilizar otro tipo de descomposición para estetipo de sistemas:
25

Capítulo 3 Estado del Arte
� Los circuitos desequilibrados en carga y tensiones no podrían ser anali-zados.
� En el caso senoidal la potencia instantánea es constante, es decir, noexiste �uctuación de potencia global entre la fuente y la carga. Sinembargo, esta �uctuación existe en cada una de las fases. Por este motivola potencia reactiva sigue siendo de utilidad para evaluar la e�ciencia dela transferencia de energía. Dicha potencia se compensa tradicionalmentemediante elementos almacenadores de energía, condensadores o bobinas,para aumentar el factor de potencia.
Por otra parte, es interesante observar que las oscilaciones de potenciadebidas a la potencia reactiva tienen igual amplitud en cada una de lasfases y existe un desfase de 2�=3 radianes entre ellas. Esto implica que lapotencia reactiva en una de las fases es la suma de las potencias reactivasde las otras dos. Es decir, que, de forma instantánea, se produce entrelas fases un intercambio de potencia reactiva. Por tanto, para compensaresta reactiva, no tendríamos por qué tener un elemento almacenador deenergía, tal y como ocurría en el caso monofásico. Dicho compensador,que ha de ser activo, debería tomar la potencia reactiva de dos de las fasese inyectarla en la otra. Esta es la idea en la que se basa la teoría de lapotencia reactiva instantánea [1],[83]. En el caso de utilizar extensionesdel caso monofásico, se estaría perdiendo este importante aspecto de latransmisión de potencia de los sistemas trifásicos, que introduce la ideade la compensación activa sin elementos almacenadores de energía.
Las principales teorías que han sido desarrolladas se pueden dividir en dos:sistemas trifásicos sin conductor neutro (tres hilos) y sistemas trifásicos conneutro (cuatro hilos), si bien estas últimas no se encuentran todavía comple-tamente cerradas.
3.2.2.1 Sistemas trifásicos de tres hilos
3.2.2.1.1 Czarnecki
Este autor propone una descomposición ortogonal de intensidades análoga a larealizada en el caso monofásico, pero aplicada al trifásico, [18]. En concreto,se analiza una carga trifásica no lineal con desequilibrio, alimentada medianteuna tensión no senoidal equilibrada. Las magnitudes en cada una de las fasesse pueden expresar en serie de Fourier mediante una expresión similar a laecuación (3.1). Agrupando las magnitudes de cada una de las fases se obtiene
26

Estado del Arte
un vector:f = [fR; fS; fT ]
t (3.48)
Los vectores así de�nidos forman un espacio L2 , en el que se pueden establecerlas siguientes operaciones:
� Producto escalar entre dos vectores fff i y fff j:
(f i;f j) =1
T
Z T
0
f tif jdt =
= ReXk
�F ikRF
�jkR + F ikSF
�jkS + F ikTF
�jkT
�(3.49)
� Norma de un vector fff :
k f k=p(f ;f) =
sXk
(F 2kR + F 2
kS + F 2kT ) (3.50)
Esta norma puede entenderse como un valor e�caz generalizado, equi-valente a una cantidad en corriente continua que tiene el mismo efectotérmico que en el sistema trifásico las cantidades fR, fS y fT .
Dos vectores f i y f j son ortogonales si su producto escalar es cero:
(f i;f j) = 0 (3.51)
en cuyo caso cumplen la siguiente relación de normas:
k f i + f j k2=k f i k2 + k f j k2 (3.52)
Si los armónicos de tensión están incluidos en el conjunto Nu, al ser la carga nolineal, la intensidad de la fuente contendrá armónicos de este conjunto más losproducidos por la carga, contenidos en el conjunto Ni, que no están presentesen Nu. Por tanto, la intensidad puede descomponerse en dos componentesortogonales por tratarse de armónicos de diferente frecuencia:
i = io + ig (3.53)
donde io es la componente con armónicos en el conjunto Nu e ig es la compo-nente con armónicos en el conjunto Ni.
27

Capítulo 3 Estado del Arte
Dada la potencia activa y reactiva de la carga para una armónico, puede cal-cularse la conductancia y susceptancia equivalentes de una carga simétrica quetuviera las mismas potencias que ésta:
Gne =Pn
k un k ; Bne =Qn
k un k (3.54)
Con estos parámetros, la intensidad io puede descomponerse en sus compo-nentes activa, dispersa, reactiva y de desequilibrio:
ia = Geu Ge =P
k u k (3.55)
is =Xk2Nu
Gkeuk �Geu (3.56)
ir =Xk2Nu
jBkeuk (3.57)
iu = i� ia � is � ir (3.58)
Al ser estas componentes ortogonales, se veri�ca:
k i k2=k ia k2 + k is k2 + k ir k2 + k iu k2 (3.59)
Resulta evidente que la última intensidad es la que aparece en el caso de que lacarga fuese desequilibrada. En caso contrario la intensidad io que demandaríala carga sería:
io =Xk2Nu
(Gk + jBk)u (3.60)
y las intensidades activa más dispersa y la reactiva:
ia + is =Xk2Nu
Gku ir =Xk2Nu
jBku (3.61)
por lo que se veri�ca que:
iu = i� ia � is � ir = 0 (3.62)
28

Estado del Arte
3.2.2.1.2 Akagi
Este autor propone la teoría de la potencia reactiva instantánea, [1]. Dadoun sistema trifásico, en el que por simplicidad se excluyen las componentes desecuencia cero, se de�ne el cambio de coordenadas siguiente:
�f�f�
�=p2=3
�1 �1=2 �1=20p3=2 �p3=2
�24 fafbfc
35 (3.63)
f�� = Tfabc (3.64)
siendo fabc tensiones o intensidades de fase del sistema trifásico, f�� la trans-formación de las mismas en el nuevo sistema de coordenadas �� y T la matrizde cambio de coordenadas. Puede observarse que la transformación realizadaes la de Park, por lo que, en ausencia de componente homopolar, el sistematrifásico puede ser representado sólo mediante las dos magnitudes en los ejes�� � , siendo éstos ortogonales.
La potencia instantánea se de�ne en las nuevas coordenadas como:
p = eaia + ebib + ecic = e�i� + e�i� (3.65)
La potencia reactiva instantánea q, es el módulo del vector de potencia instan-tánea imaginaria q, de�nido como:
q = e� � i� + e� � i� (3.66)
q = e�i� � e�i� (3.67)
Por tanto, la potencia activa y reactiva instantáneas se pueden expresar según:�pq
�=
�e� e��e� e�
� �i�i�
�(3.68)
Invirtiendo la relación (3.68), se obtiene una expresión de las intensidadesque puede separarse en dos sumandos dependiendo de la potencia activa yreactiva instantáneas respectivamente:�
i�i�
�=
�e� e��e� e�
� �p0
�+
�e� e��e� e�
� �0q
�=
=
�i�pi�p
�+
�i�qi�q
�(3.69)
29

Capítulo 3 Estado del Arte
La potencia activa instantánea (3.65), es la suma de las potencias en cada unode los ejes ��, que puede expresarse en función de las intensidades de (3.69):
p = p� + p� = e�i� + e�i� = e�i�p + e�i�p = p�p + p�p (3.70)
veri�cándose además que:
0 = e�i�q + e�i�q = p�q + p�q (3.71)
Es decir, que las potencias p�q y p�q, que aparecen por la existencia de lapotencia imaginaria instantánea, no contribuyen al �ujo de potencia activa,ya que se cancelan mutuamente. La novedad de esta teoría se basa en eldiseño de compensadores activos sin almacenamiento de energía que eliminanlos términos que depende de la potencia imaginaria instantánea: p�q y p�q.En [1], el autor hace la extensión a casos en los que se encuentre presentela componente homopolar, incluyendo su potencia e0i0 dentro de la potenciainstantánea que, como posteriormente se comprobará es inadecuada, [83].
3.2.2.1.3 Willems
La teoría de Willems, [83], se basa en una nueva interpretación de la teoríade Akagi. Se a�rma que no es necesario realizar un cambio de coordenadaspara calcular las potencias instantáneas activa y reactiva, pudiendo estas sercalculadas a partir de tensiones e intensidades en las fases. Así, dados los vec-tores de tensión, u(t), e intensidad, i(t), la potencia instantánea es el productoescalar de ambos:
p(t) = u(t)ti(t) (3.72)
Si ip(t) es la proyección ortogonal de la intensidad i(t) sobre el vector detensión u(t), se debe veri�car:
u(t)ti(t) = u(t)tip(t) (3.73)
por lo que el término ip(t) es el responsable de la transmisión de la potenciap(t), y se puede expresar a partir de ésta:
ip(t) =u(t)ti(t)
ju(t)j u(t) =p(t)
ju(t)ju(t) (3.74)
La componente no activa de la intensidad, que no contribuye a la transmisiónde potencia, es:
iq(t) = i(t)� ip(t) (3.75)
30

Estado del Arte
y además es ortogonal al vector de tensión:
v(t)tiq(t) = 0 (3.76)
La potencia imaginaria instantánea puede ser asociada a la cantidad:
jq(t)j = jv(t)jjiq(t)j (3.77)
Los sistemas trifásicos sin secuencia homopolar pueden ser representados me-diante dos variables, teniéndose una representación bidimensional del proble-ma. En este caso, a la potencia imaginaria instantánea jq(t)j se le puede asociarun signo, estando entonces ligada con el producto vectorial de tensión e inten-sidad, tal y como fue de�nido en [1] por Akagi. Con este nuevo punto de vista,no existe ningún problema a la hora de tratar la componente homopolar y,como puede demostrarse, estará contenida tanto en la potencia activa comoen la imaginaria instantánea.
3.2.2.1.4 Ferrero y Superti-Furga
Estos autores aplican la transformación de Park a sistemas trifásicos de treshilos para obtener una descomposición de los términos de potencia más generalque la propuesta por Akagi, [31].
Dadas unas magnitudes del sistema trifásico, se de�ne la transformaciónde Park como:
ydqo = Tyabc (3.78)
donde T es la matriz ortogonal:
T =
26664q
23
�q
16
�q
16
0q
12
�q
12q
13
q13
q13
37775 (3.79)
En ausencia de componente homopolar, el sistema trifásico puede de�nirsemediante el vector de Park:
y(t) = yd + jyq (3.80)
Si las señales son periódicas, este vector puede descomponerse en una seriecompleja de Fourier:
y(t) =+1X�1
Y kejk!t (3.81)
31

Capítulo 3 Estado del Arte
Cada sumando es un vector de Park, Y k, con amplitud constante, Yk, que giraa una velocidad proporcional a su orden de armónico respecto al fundamental.Cada frecuencia armónica está formada por dos componentes, positiva y nega-tiva, que giran a la misma velocidad pero con sentidos contrarios. El términopositivo está asociado con el fasor de la componente directa del armónico, ~Y1k,mientras que el negativo lo está con el conjugado del fasor de la inversa, ~Y2k:
Y k = ~Y1k k > 0 Y k = ~Y �2k k < 0 (3.82)
La potencia instantánea compleja de Park se puede de�nir como:
ap(t) = pp(t) + jqp(t) = u(t)i�(t) (3.83)
donde:pp(t) = Re [ap(t)] = udid + uqiq (3.84)
qp(t) = Im [ap(t)] = uqid � udiq (3.85)
La potencia reactiva instantánea de Park, qp(t), puede ser compensada com-pletamente mediante elementos activos no almacenadores de energía y tiene elmismo valor que el módulo de la potencia instantánea imaginaria de�nida en[1] por Akagi.
Si en lugar de expresar los términos de potencia de Park en función delas magnitudes temporales de tensión e intensidad, se hace en función de susdesarrollos en serie, se llega a otra expresión de la potencia:
ap(t) =+1X�1
UkI�k +
Xk 6=h
U kI�he
j(k�h)!t (3.86)
De�nida la potencia instantánea de Park en función de los armónicos de tensióne intensidad, es posible obtener el valor medio de la misma, que será unamagnitud compleja, mediante la integración en un periodo:
Ap(t) = Pp + jQp =1
T
Z T
0
u(t)i�(t)dt =
=+1X�1
UkI�k (3.87)
La parte real de esta magnitud corresponde a la potencia activa consumida,por lo que si se de�ne la potencia aparente como el producto de los valores
32

Estado del Arte
e�caces de los vectores Park de tensión e intensidad, se puede expresar el factorde potencia para un sistema trifásico como:
� =PpS
(3.88)
Se puede demostrar que el valor medio de la potencia compleja de Park, Ap, essiempre inferior a la potencia aparente, S, por lo que se de�ne una cantidad,que no es la potencia distorsionante de�nida por Budeanu, que veri�ca:
D2p = S2 � A2
p (3.89)
De esta forma, la expresión de la potencia aparente se escribe:
S2 = A2p +Q2
p +D2p (3.90)
A los vectores de Park se les puede aplicar las descomposiciones tanto en eldominio del tiempo como de la frecuencia:
� Dominio del tiempo. La parte activa de la intensidad, como aquellacomponente responsable de la potencia media, es:
ia(t) =PpU2v(t) (3.91)
Por tanto, la parte no activa se puede obtener por diferencia:
ix(t) = i(t)� ia(t) (3.92)
� Dominio de la frecuencia. Aplicando esta descomposición se pueden ob-tener expresiones de las potencias medias de�nidas anteriormente en fun-ción de tensiones e intensidades.Al realizar el desarrollo en serie de Fourier, se puede aplicar una des-composición de intensidades similar a la realizada en [18]. Para ello, enprimer lugar se de�nen los conjuntos en los que se engloban los armó-nicos de intensidad: Nu, armónicos comunes a tensión e intensidad, yNf , armónicos presentes sólo en intensidad. Para el grupo Nu se puedede�nir una admitancia:
Gk + jBk =Ik
Uk(3.93)
a partir de la cual se pueden expresar las potencias medias de Park:
Pp =Xk2Nu
GkU2k Qp = �
Xk2Nu
BkU2k (3.94)
33

Capítulo 3 Estado del Arte
Se de�ne una conductancia equivalente, que es la que demanda la poten-cia activa Pp:
Ge =PpU2
(3.95)
de forma que la intensidad activa es:
ia = Geu(t) (3.96)
La intensidad dispersa es la diferencia de la componente real de la inten-sidad y la activa:
is =Xk2Nu
(Gk �Ge)Ukejk!t (3.97)
De igual forma, se puede de�nir una susceptancia equivalente, que seríaresponsable de la aparición de la potencia media imaginaria de Park:
Be =Qp
U2(3.98)
cuya intensidad asociada es:
iq = �jBeu(t) (3.99)
a partir de la cual se de�ne la intensidad imaginaria dispersa:
irs = ir � iq =Xk2Nu
(Bk +Be)Ukejk!t (3.100)
Una vez que han sido de�nidas todas las componentes de intensidad queestán contenidas en el conjunto Nu en función de las admitancias de lacarga y la tensión de alimentación, basta caracterizar los armónicos deintensidad no presentes en la tensión:
if =Xk2Nf
Ifejk!t (3.101)
el conjunto de intensidades de�nidas conforman la intensidad total:
i = ia + is + iq + irs + if (3.102)
Además se puede comprobar que todas son ortogonales entre sí, por loque veri�can la siguiente ecuación:
I2 = I2a + I2s + I2q + I2rs + I2f (3.103)
34

Estado del Arte
La relación existente entre estas intensidades y los términos de potenciaanteriormente de�nidos es clara. La intensidad ia es la relacionada conla aparición de la potencia activa Pp, la intensidad iq es la responsable dela potencia reactiva Qp, mientras que el resto de componentes conformanel término Dp:
D2p = U2I2s + U2I2rs + U2I2f (3.104)
Por último, aunque en el capítulo siguiente se hará hincapié en ello, esconveniente resaltar que la minimización de la potencia media imagina-ria de Park mediante elementos almacenadores de energía no lleva a unfactor de potencia máximo, lo cual es evidente por (3.104), en la que eltérmino U2I2rs está presente. Para obtener un factor de potencia máximola función que se tendrá que minimizar es U2(I2q + I2rs).
3.3 Filtros pasivos sintonizados
La utilización de �ltros pasivos sintonizados en los sistemas de distribuciónpara la reducción de la distorsión armónica es una práctica común en el ámbitoindustrial. Un �ltro pasivo sintonizado está compuesto en cada fase por unabobina conectada en serie con un condensador, tal y como se muestra en laFigura 3.1. Idealmente, la impedancia del �ltro es nula para la frecuenciaa la cual el �ltro ha sido sintonizado, si bien siempre existe una pequeñaresistencia debida fundamentalmente a la bobina del �ltro. Dicha resistenciase puede obtener a partir del factor de calidad de la bobina, que se de�ne comoel cociente entre la reactancia a 50 Hz y la resistencia:
Q =!L
R(3.105)
La frecuencia de sintonización del �ltro, para la cual presenta una impe-dancia nula en el caso ideal, está relacionada con los valores del condensadory la bobina mediante la expresión:
fs =1
2�pLC
(3.106)
El comportamiento del �ltro pasivo depende de la frecuencia. Así, para va-lores inferiores a la frecuencia de sintonización, el �ltro se comporta como uncondensador; para la frecuencia de sintonización es un cortocircuito, mientras
35
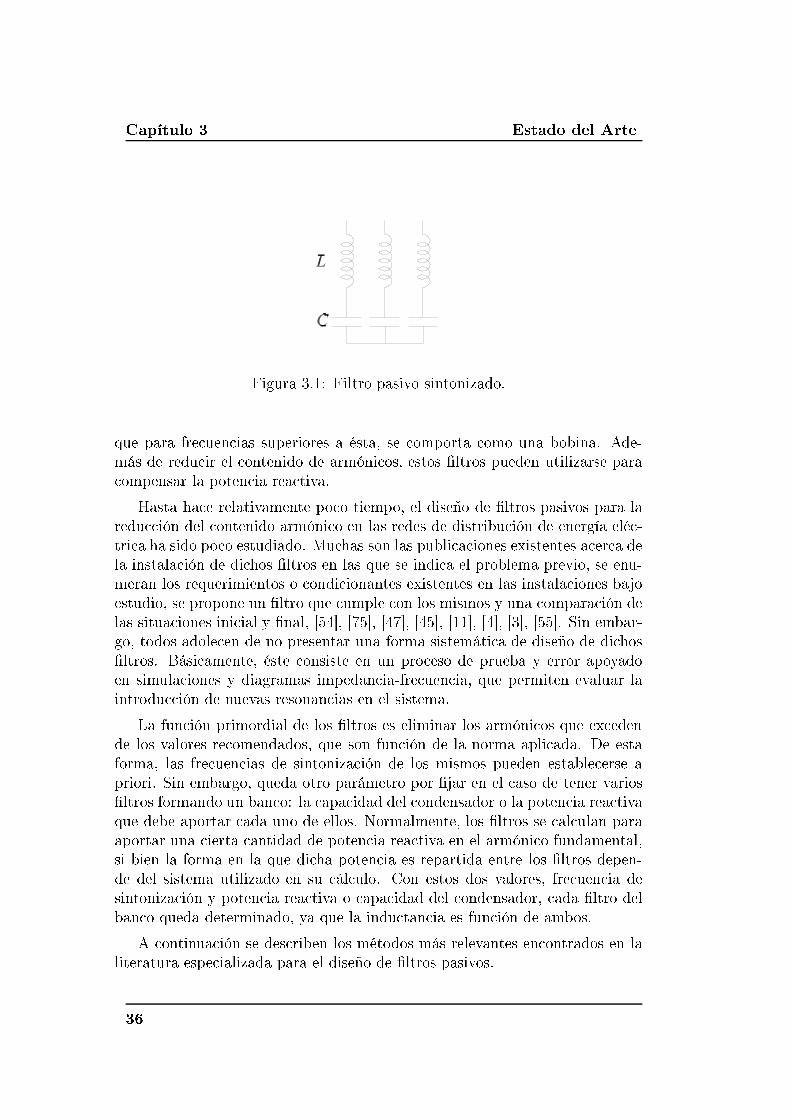
Capítulo 3 Estado del Arte
Figura 3.1: Filtro pasivo sintonizado.
que para frecuencias superiores a ésta, se comporta como una bobina. Ade-más de reducir el contenido de armónicos, estos �ltros pueden utilizarse paracompensar la potencia reactiva.
Hasta hace relativamente poco tiempo, el diseño de �ltros pasivos para lareducción del contenido armónico en las redes de distribución de energía eléc-trica ha sido poco estudiado. Muchas son las publicaciones existentes acerca dela instalación de dichos �ltros en las que se indica el problema previo, se enu-meran los requerimientos o condicionantes existentes en las instalaciones bajoestudio, se propone un �ltro que cumple con los mismos y una comparación delas situaciones inicial y �nal, [54], [75], [47], [45], [11], [4], [3], [55]. Sin embar-go, todos adolecen de no presentar una forma sistemática de diseño de dichos�ltros. Básicamente, éste consiste en un proceso de prueba y error apoyadoen simulaciones y diagramas impedancia-frecuencia, que permiten evaluar laintroducción de nuevas resonancias en el sistema.
La función primordial de los �ltros es eliminar los armónicos que excedende los valores recomendados, que son función de la norma aplicada. De estaforma, las frecuencias de sintonización de los mismos pueden establecerse apriori. Sin embargo, queda otro parámetro por �jar en el caso de tener varios�ltros formando un banco: la capacidad del condensador o la potencia reactivaque debe aportar cada uno de ellos. Normalmente, los �ltros se calculan paraaportar una cierta cantidad de potencia reactiva en el armónico fundamental,si bien la forma en la que dicha potencia es repartida entre los �ltros depen-de del sistema utilizado en su cálculo. Con estos dos valores, frecuencia desintonización y potencia reactiva o capacidad del condensador, cada �ltro delbanco queda determinado, ya que la inductancia es función de ambos.
A continuación se describen los métodos más relevantes encontrados en laliteratura especializada para el diseño de �ltros pasivos.
36

Estado del Arte
3.3.1 Steeper
Es una de las publicaciones más antiguas existentes sobre la materia [74]. Enella no se indica la forma de repartir la potencia reactiva entre los �ltros, sedice que es arbitraria, dependiendo de la experiencia. El método de diseño sebasa en un proceso de prueba y error. Con esta forma de proceder, se tiene unacompensación total de la potencia reactiva del armónico fundamental y unadisminución de los armónicos cuya frecuencia de sintonización coincide con lade los �ltros, pero se pierde el control sobre los demás armónicos.
En la misma línea justi�cativa y con los mismos problemas asociados seencuentra [39], en la que la potencia reactiva de cada �ltro se ajusta en funcióndel porcentaje de armónicos que cada �ltro puede absorber.
3.3.1.1 Phipps
Este autor establece un procedimiento de diseño mediante la utilización defunciones de transferencia, si bien realmente no es más que una forma grá�cade representar los resultados de un proceso de diseño por prueba y error [58].La idea básica propuesta consiste en la representación grá�ca de la función detransferencia compuesta por la intensidad del sistema frente a la intensidaddemandada por la carga. Dicha función puede ser expresada en términos delas impedancias del sistema y de los �ltros, ya que estos forman un divisor deintensidad para las corrientes armónicas, tal y como se muestra en la Figura3.2:
H =IsIg
=Zf
Zf + Zs
(3.107)
Como es lógico, las condiciones de �ltrado han ser tales que la normativaconcerniente a límites de emisión de armónicos se cumpla. Si la intensidadmaxima que se permite para el armónico h-esimo es Ihlim, puede ser de�nidala siguiente función de transferencia:
G(h) =IhlimIg
(3.108)
Dicha función constituye un límite superior a la característica de �ltrado de-�nida en (3.107), siendo ésta la herramienta utilizada para el diseño de los�ltros. Un valor superior a la unidad en (3.108) implica que los armónicosestán dentro de los límites establecidos, no siendo necesaria la instalación de�ltros sintonizados para dichas frecuencias. Todo lo contrario ocurre cuandoeste cociente es inferior a la unidad. Por tanto, la información aportada por(3.108) es doble: además de indicar cuales son los armónicos idóneos para la
37

Capítulo 3 Estado del Arte
sintonización de los �ltros, provee un límite superior a la función de transferen-cia de�nida por (3.107), que se irá modi�cando conforme se vayan añadiendodichos �ltros.
Si bien es un método sencillo para el diseño de �ltros pasivos, tiene el in-conveniente de basarse en procesos de prueba y error, en los que la experienciajuega un papel fundamental. Además presenta la limitación adicional de notener en cuenta los armónicos que pudieran estar contenidos en la tension delsistema.
3.3.2 Kawann y Emanuel
El objetivo buscado por estos autores es minimizar el coste de los �ltros utili-zados para reducir la distorsión de intensidad y compensar la potencia reactivadel fundamental [43]. En el caso de tener un único �ltro, la optimización decoste no es posible, debido a que la restricción de potencia reactiva es su�-ciente para acometer el diseño del mismo. Sin embargo, con más de un �ltro,diferente asignación de reactiva entre los mismos darán lugar a costes distin-tos, pudiéndose, por tanto, optimizar éste. Dadas las funciones de coste debobinas y condensadores, Kl y Kc, en función de las potencias aparentes queestos absorben, SLi y SCi respectivamente, la función a minimizar es:
min f =Xi
(Kl +Kc)i
sujeto aXi
Q1i = Q1t (3.109)
El método propuesto es sólo aproximado debido a los siguientes motivos:
� Para calcular la potencia aparente de condensadores y bobinas, SCi ySLi, se utilizan valores de tensión e intensidad que están formados única-mente por el fundamental y el armónico al cual está sintonizado el �ltro,despreciándose el resto de armónicos.
� Se considera que la tensión no cambia en el punto de acoplamiento cuandoel �ltro se instala, no teniéndose presente la impedancia del sistema.
� No se contemplan armónicos en la tension de alimentación.
3.3.3 Mattavelli
Uno de los principales problemas que tiene la reducción de armónicos y com-pensación de potencia reactiva mediante elementos pasivos es la modi�cación
38

Estado del Arte
Figura 3.2: Circuito equivalente de un sistema de distribución.
de las impedancias existentes en el punto de instalación del �ltro, con la posi-ble aparición de resonancias entre la impedancia del sistema y la de los �ltros.Para evitar estas resonancias, en lugar del clásico procedimiento de pruebay error, este autor propone minimizar la corriente armónica que circula porel sistema [48]. Si además se impone como requerimiento adicional la com-pensación de potencia reactiva del armónico fundamental, el problema quedaplanteado de la siguiente forma:
min =Xk>1
I2sk =Xk>1
�Usk
Zsk + Zak
�2
+
�IlkZak
Zsk + Zak
�2
sujeto aXi
Q1i = Q1t (3.110)
donde Usk es la tension de la fuente para el armónico k-esimo, Ilk es la inten-sidad no lineal, y Zsk, Zak, son las impedancias de la fuente, y la equivalentedel paralelo formado por la parte lineal de la carga Zlk y del �ltro instaladoZfk, respectivamente, tal y como se recoge en la Figura 3.2.
El problema planteado de esta forma presenta dos inconvenientes:
� La función objetivo propuesta (3.110) tiene el inconveniente de suponerortogonales los armónicos de intensidad generados por la tensión armóni-ca de la fuente y los armónicos de la carga no lineal, cuando, en realidad,no tienen por qué serlo.
� Por otra parte, la solución de esta ecuación no es posible hallarla median-te un método iterativo como el propuesto en [50], dado su alto carácterno lineal, sobre todo cuando se presentan armónicos por debajo de lafrecuencia de sintonización más baja de los �ltros instalados. Dicho mé-todo consiste en suponer constante, para cada una de las iteraciones,la tensión a la cual está sometida la carga, no teniéndose en cuenta la
39

Capítulo 3 Estado del Arte
impedancia del sistema. Bajo este supuesto, en cada iteración se calculael compensador que minimiza la función objetivo con tensión de la cargaconstante, actualizándose posteriormente dicha tensión, e iterando hastaque el error en las tensiones sea inferior a un cierto límite.
Tal y como se verá en la sección 4.2.2.2 del Capítulo 4 esta forma deproceder no es adecuada, debido a que el carácter de la función quese minimiza considerando la impedancia del sistema es completamentedistinto al que ésta presenta sin dicha impedancia.
3.3.4 Lin
Este autor propone en [46] un método sistemático para el diseño de �ltrospasivos, cuyo objetivo es la minimización de la distorsión de intensidad sujetaa una serie de restricciones:
� Compensación de potencia reactiva para el armónico fundamental.
� Cumplimiento de los límites máximos de armónicos recomendados porla normativa que se esté aplicando.
� Desintonización de los �ltros. Una práctica habitual a la hora de instalar�ltros sintonizados es modi�car ligeramente la frecuencia de sintonizaciónpara evitar que coincida en un orden entero de armónico. De esta forma,aunque se disminuye su e�cacia, se previene la circulación de corrientesarmónicas elevadas a la frecuencia de sintonización. Dichas intensidadesson altas dado que, para estas frecuencias, la impedancia de los �ltros esnula teóricamente, si bien existe en realidad, aún con perfecta sintoniza-ción, una pequeña resistencia debida a la bobina. Los autores proponenunos límites entre los cuales deben estar comprendidas las frecuenciasde sintonización de los �ltros, en base a las posibles variaciones que porenvejecimiento pueden sufrir tanto la bobina como el condensador quecomponen el �ltro.
Con todos estos condicionantes, el problema se plantea de la siguiente forma:
min THDi =
pPk>1 I
2k
I1
sujeto aXi
Q1i = Q1t
0 < Ik < Ikmax k = 2 : : : n
khi � 1 < khi < �khi i = 1 : : :m (3.111)
40
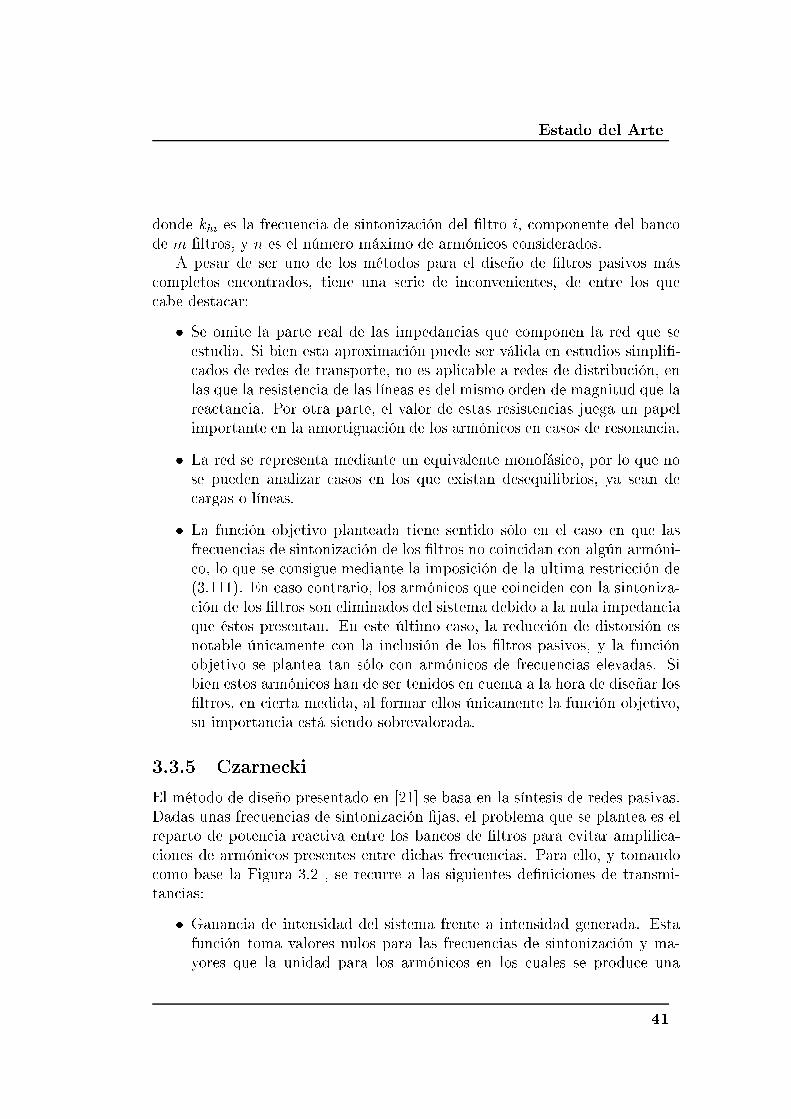
Estado del Arte
donde khi es la frecuencia de sintonización del �ltro i, componente del bancode m �ltros, y n es el número máximo de armónicos considerados.
A pesar de ser uno de los métodos para el diseño de �ltros pasivos máscompletos encontrados, tiene una serie de inconvenientes, de entre los quecabe destacar:
� Se omite la parte real de las impedancias que componen la red que seestudia. Si bien esta aproximación puede ser válida en estudios simpli�-cados de redes de transporte, no es aplicable a redes de distribución, enlas que la resistencia de las líneas es del mismo orden de magnitud que lareactancia. Por otra parte, el valor de estas resistencias juega un papelimportante en la amortiguación de los armónicos en casos de resonancia.
� La red se representa mediante un equivalente monofásico, por lo que nose pueden analizar casos en los que existan desequilibrios, ya sean decargas o líneas.
� La función objetivo planteada tiene sentido sólo en el caso en que lasfrecuencias de sintonización de los �ltros no coincidan con algún armóni-co, lo que se consigue mediante la imposición de la ultima restricción de(3.111). En caso contrario, los armónicos que coinciden con la sintoniza-ción de los �ltros son eliminados del sistema debido a la nula impedanciaque éstos presentan. En este último caso, la reducción de distorsión esnotable únicamente con la inclusión de los �ltros pasivos, y la funciónobjetivo se plantea tan sólo con armónicos de frecuencias elevadas. Sibien estos armónicos han de ser tenidos en cuenta a la hora de diseñar los�ltros, en cierta medida, al formar ellos únicamente la función objetivo,su importancia está siendo sobrevalorada.
3.3.5 Czarnecki
El método de diseño presentado en [21] se basa en la síntesis de redes pasivas.Dadas unas frecuencias de sintonización �jas, el problema que se plantea es elreparto de potencia reactiva entre los bancos de �ltros para evitar ampli�ca-ciones de armónicos presentes entre dichas frecuencias. Para ello, y tomandocomo base la Figura 3.2 , se recurre a las siguientes de�niciones de transmi-tancias:
� Ganancia de intensidad del sistema frente a intensidad generada. Estafunción toma valores nulos para las frecuencias de sintonización y ma-yores que la unidad para los armónicos en los cuales se produce una
41

Capítulo 3 Estado del Arte
ampli�cación de intensidad. Este cociente puede ser expresado en fun-ción de las impedancias presentes en el circuito de la Figura 3.2:
Bn =IsIg
=Za
Zs + Za(3.112)
donde Za es la impedancia equivalente de los �ltros más la carga lineal.
� Admitancia desde la red. Caracteriza los armónicos de la intensidad delsistema que son producidos por la tension de alimentación. Es evidenteque este parámetro tendrá un valor elevado si la tensión de alimentaciónpresenta armónicos a las frecuencias de sintonización de los �ltros. Suexpresión en función de las impedancias es:
Yx =IsUs
=1
Zs + Za
(3.113)
� Impedancia desde la carga. Es representativa de las tensiones armónicasque se generan debidas a la intensidad de la carga. Presentará un valornulo para las frecuencias de sintonización de los �ltros:
Zy =Ul
Ig=
ZsZa
Zs + Za(3.114)
Como se puede comprobar, todos los cocientes que han sido de�nidos tienenel mismo denominador: Zs + Za. Dado que dicho denominador es función dela frecuencia, es posible expresarlo en términos de la transformada de Laplacesustituyendo j! por s. De esta forma, el denominador se expresa según unpolinomio en s. Puesto que este polinomio conforma el denominador de lascocientes de�nidos, sus ceros denotan los máximos de los mismos, que coincidencon los valores en los que se producen las resonancias entre la impedancia delsistema y los �ltros instalados. La importancia de la ubicación de estos ceros escapital, sirva como ejemplo la Figura 3.3, en la que se muestran la impedanciaque se ve desde la carga y la admitancia desde la red para un sistema en elque se instalan tres �ltros sintonizados en los armónicos quinto, séptimo ydecimoprimero. Los demás valores utilizados para confeccionar el ejemplo sonirrelevantes para el objetivo perseguido. Concretamente, con el control de laposición de los ceros se pueden conseguir dos objetivos:
� Atenuación de los armónicos no característicos. Estos armónicos son losque generalmente se encuentran en el sistema en pequeña proporción.
42
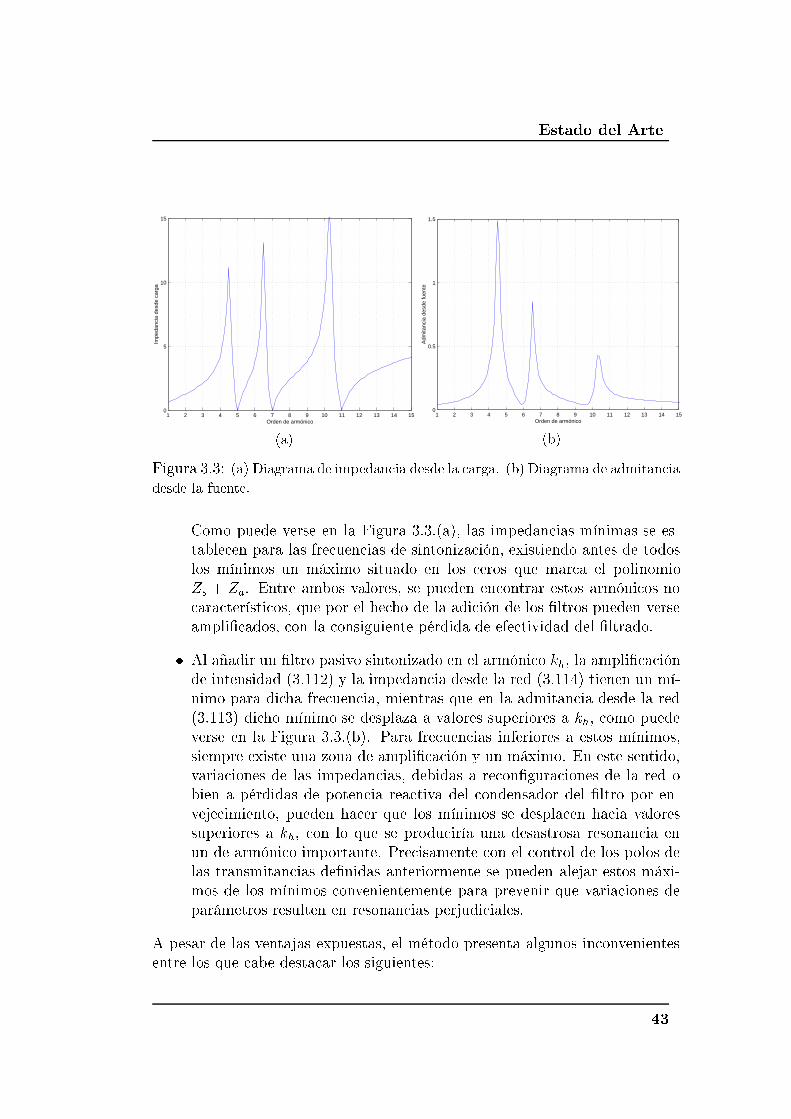
Estado del Arte
1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
5
10
15
Orden de armónico
Impe
danc
ia d
esde
car
ga
(a)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
0.5
1
1.5
Orden de armónicoA
dmita
ncia
des
de fu
ente
(b)
Figura 3.3: (a) Diagrama de impedancia desde la carga. (b) Diagrama de admitancia
desde la fuente.
Como puede verse en la Figura 3.3.(a), las impedancias mínimas se es-tablecen para las frecuencias de sintonización, existiendo antes de todoslos mínimos un máximo situado en los ceros que marca el polinomioZs + Za. Entre ambos valores, se pueden encontrar estos armónicos nocaracterísticos, que por el hecho de la adición de los �ltros pueden verseampli�cados, con la consiguiente pérdida de efectividad del �ltrado.
� Al añadir un �ltro pasivo sintonizado en el armónico kh, la ampli�caciónde intensidad (3.112) y la impedancia desde la red (3.114) tienen un mí-nimo para dicha frecuencia, mientras que en la admitancia desde la red(3.113) dicho mínimo se desplaza a valores superiores a kh, como puedeverse en la Figura 3.3.(b). Para frecuencias inferiores a estos mínimos,siempre existe una zona de ampli�cación y un máximo. En este sentido,variaciones de las impedancias, debidas a recon�guraciones de la red obien a pérdidas de potencia reactiva del condensador del �ltro por en-vejecimiento, pueden hacer que los mínimos se desplacen hacia valoressuperiores a kh, con lo que se produciría una desastrosa resonancia enun de armónico importante. Precisamente con el control de los polos delas transmitancias de�nidas anteriormente se pueden alejar estos máxi-mos de los mínimos convenientemente para prevenir que variaciones deparámetros resulten en resonancias perjudiciales.
A pesar de las ventajas expuestas, el método presenta algunos inconvenientesentre los que cabe destacar los siguientes:
43

Capítulo 3 Estado del Arte
� La selección de los polos de las transmitancias de�nidas anteriormentees arbitraria, por lo que el diseño de los �ltros se sigue apoyando enprocesos de prueba y error.
� El modelo de red que se utiliza es monofásico. Además, no se tienen encuenta las partes resistivas de las impedancias.
� Aunque no se menciona en [21], es imposible disponer libremente los polosdel sistema y además compensar la energía reactiva del armónico funda-mental. Esta conclusión es lógica, pues tal y como se puede comprobaren la Figura 3.3, existen tantos polos o máximos de las transmitanciascomo �ltros se instalan. Si se �jan dichos polos, automáticamente se tie-nen determinados los valores de los condensadores de cada �ltro. Parapoder además compensar la reactiva del fundamental, el autor introduceuna reactancia en serie con la impedancia de red de valor desconocido,de forma que el problema presenta el mismo número de ecuaciones eincógnitas.
3.3.6 Czarnecki y Ginn
Proponen un método numérico para la optimización de �ltros pasivos en basea dos parámetros que miden la efectividad de los mismos, [38], [23], [22]:
� Reducción de la distorsión de corriente. Si kidok es la norma de intensidadantes de instalar el �ltro, equivalente a su valor e�caz, e kidk el valor e�cazdespués de la instalación, una medida de la efectividad en la reducciónde la distorsión de intensidad es:
"i = 1� kidkkidok (3.115)
� Reducción de la distorsión de tension. Al igual que el parámetro de�nidopara la intensidad:
"u = 1� kudkkudok (3.116)
Normalmente, la minimización de uno de estos parámetros no lleva a la reduc-ción del otro, debido a que la tension de la red puede estar distorsionada. Paraencontrar un equilibrio entre la reducción de la tasa de distorsión de tension eintensidad, se puede minimizar una función objetivo de la forma:
f =Wi(1� "i) +Wu(1� "u) (3.117)
44

Estado del Arte
propuesta previamente por Sharon en [64]. El peso que se le da a cada uno delos coe�cientes Wi y Wu determinará la solución �nal obtenida en función delo que se crea más conveniente para cada tipo de aplicación estudiada.Las restricciones que se añaden a la función objetivo son la positividad delos elementos LC componentes de los �ltros y la compensación de la potenciareactiva en el armónico fundamental. En esta formulación del problema, sedeja cierta libertad a la hora de compensar la potencia reactiva, pudiéndoseestablecer unos márgenes entre los cuales se puede realizar la compensación.Con todo esto el problema se formula de la siguiente forma:
min f = Wikidkkidok +Wu
kudkkudok
sujeto a Ci > 0 Li > 0 i = 1 : : :m
aQ1t <X
Qi < bQ1t
a < b < 1 (3.118)
El método no está del todo depurado debido al fuerte carácter no lineal de lafunción objetivo. Al utilizar un método de minimización basado en gradiente,la solución �nal alcanzada depende del valor inicial a partir del cual se inicia elproceso iterativo. De esta forma, para poder llegar a un mínimo absoluto, sepropone ejecutar varias veces el algoritmo a partir de valores iniciales distintos.En este sentido, nunca hay garantías de haber alcanzado dicho mínimo.
3.4 Resumen del capítulo
En el presente capítulo se ha realizado una revisión de la literatura especializa-da referente a las de�niciones de la potencia reactiva y los métodos de diseñode �ltros pasivos:
� Potencia reactiva. Se analizan las teorías más relevantes para sistemasmonofásicos y trifásicos, planteadas tanto en el dominio del tiempo co-mo de la frecuencia. El objetivo de este estudio ha sido encontrar lasde�niciones de potencia reactiva tales que mediante su compensación seconsiga un aumento del factor de potencia. Por otra parte, y desde elpunto de vista del diseño del compensador de potencia reactiva, tam-bién es importante que dicho término de potencia pueda ser expresadoen función de las características de la carga. De esta forma, el diseño delcompensador se puede realizar en función de las características de ésta.
45
Capítulo 3 Estado del Arte
� Diseño de �ltros pasivos. A pesar de ser práctica habitual la utilizaciónde los �ltros pasivos para la mitigación de armónicos en las redes dedistribución, se puede comprobar la ausencia de propuestas de diseñosistemático de los mismos. Tan solo publicaciones recientes tratan eltema de una forma exhaustiva, si bien presentan aspectos que puedenser mejorados:
� Las funciones que se plantean para la optimización de los �ltrostienen un fuerte carácter no lineal. Por una parte, desde un punto devista físico, es importante conocer los causantes de la no linealidad.Por otra, desde un punto de vista matemático, la optimización sedebe llevar a cabo mediante el uso de un método adecuado.
� Los modelos tratados en la literatura son simpli�cados. En este sen-tido, se consideran sólo las partes imaginarias de las impedanciasy la representación de la red es monofásica. Con estas simpli�ca-ciones, no pueden tratarse desequilibrios de tensiones o cargas niarmónicos no característicos.
A partir de la revisión bibliográ�ca realizada, se ha podido comprobarque el proceso de diseño de �ltros pasivos puede ser mejorado mediante laconjunción de una adecuada de�nición de potencia reactiva y un estudio de laoptimización a realizar, cicunscrito tanto al proceso de minimización como ala propia función a optimizar.
46
Capítulo 4
Compensación mediante �ltrospasivos
4.1 Introducción
En el capítulo anterior se analizaron las teorías más relevantes de potenciareactiva en regímenes no senoidales así como las diferentes técnicas de com-pensación de reactiva y armónicos. La instalación de �ltros pasivos es uno delos métodos que tradicionalmente se ha utilizado para la eliminación de armó-nicos en los sistemas eléctricos industriales. Sólo en la literatura especializadamás reciente se han encontrado justi�caciones razonables de cómo repartir lapotencia reactiva suministrada entre cada uno de los �ltros.
Por otra parte, el problema de compensación de potencia reactiva en regí-menes no senoidales se realiza siempre suponiendo que la tensión en la carga esconstante, o lo que es lo mismo, que la impedancia del sistema es despreciable,lo cual no se veri�ca del todo para sistemas eléctricos de potencia industriales.Al tener en cuenta esta impedancia interna del sistema surgen los siguientesproblemas:
� Las ecuaciones que de�nen el problema no tienen una solución analítica,por lo que se tiene que recurrir a métodos numéricos para encontrar lasolución óptima del problema.
� La solución del problema de minimización no es única. Existen multitudde óptimos locales, entre los que habrá que buscar el mínimo absoluto.
� Aparecen resonancias entre el compensador pasivo elegido y la impe-dancia del sistema. Desde el punto de vista de operación del sistema,
47
Capítulo 4 Compensación mediante �ltros pasivos
las resonancias deben ser evitadas a toda costa. Además, se debe estarlo más alejado posible de ellas, para evitar que puedan producirse porcambios en los parámetros del sistema o del compensador. Desde otropunto de vista, si se analiza el proceso de optimización, las resonanciasson las causantes de la fuerte no linealidad de la función a minimizar. Enparticular, se demostrará que las resonancias separan las regiones dondese tienen que buscar los mínimos locales.
En este capítulo se aborda el diseño de compensadores pasivos de potenciareactiva y armónicos, teniendo en cuenta la impedancia del sistema. En pri-mer lugar, se justi�cará la elección de la teoría de potencia reactiva utilizada.Posteriormente, se analizarán las ecuaciones que se tendrán que minimizar, asícomo el método numérico que se ha seleccionado para resolverlas [52], [53].
4.2 Planteamiento del problema
4.2.1 Potencia reactiva
Esta tesis se circunscribe al análisis de los sistemas de potencia industriales,caracterizados por estar compuestos principalmente por cargas trifásicas, queen general pueden ser desequilibradas. Dentro de estas cargas, las no lineales,causantes de la aparición de armónicos, suelen ser accionamientos de motoresde corriente alterna o continua, recti�cadores utilizados en procesos de elec-trólisis, calentamiento inductivo, etc., [59]. La característica principal de estascargas no lineales es que los armónicos predominantes son los impares, sin in-cluir los múltiplos de tres: 6k � 1, siendo k un número entero [59],[27].
La teoría de potencia reactiva que se utilice debe adaptarse fácilmente alas exigencias planteadas por el caso particular que se está analizando. Eneste sentido, una de las que mejor lo hace es la desarrollada por Ferrero ySuperti-Furga [31], descrita brevemente en el capítulo anterior. Las ventajasque ofrece la utilización de esta teoría son claras:
� Un sistema trifásico sin componentes homopolares puede ser tratado en eldominio de Park mediante un formulismo matemático similar al utilizadoen el caso de sistemas monofásicos. En caso contrario, no existe ningunaventaja en la utilización de este cambio de coordenadas, pues se pasade tener tres componentes por cada magnitud analizada (una para cadauna de las fases) a otras tres (directa, inversa y homopolar).
48
Compensación mediante �ltros pasivos
� Permite el tratamiento de desequilibrios en tensiones y cargas. Las com-ponentes directa e inversa de un mismo armónico son consideradas comoarmónicos diferentes en esta descomposición. En este sentido, presentaventajas frente a otras teorías de potencia reactiva de sistemas trifásicosen las que sólo puede analizarse desequilibrio de cargas [18], [19].
� En el análisis de los términos de potencia, aparece la potencia reactivainstantánea [1] que, como se vio en el capítulo anterior, puede compensar-se sin elementos almacenadores de energía. En otras formulaciones esteaspecto fundamental de la transmisión de potencia en sistemas trifásicosno está presente [19].
Para problemas equilibrados con cargas no lineales, puede comprobarse quecada armónico tiene sólo una secuencia [41]: directa (1, 4, 7, 10,. . . ), inversa(2, 5, 8, 11,. . . ) u homopolar (3, 6, 9,. . . ). Dado que en las instalacionesindustriales, los armónicos múltiplos de tres o no están presentes o su valor estan pequeño que pueden despreciarse en comparación con el resto, el sistematrifásico puede estudiarse en el dominio de Park con la presencia de dos únicascomponentes, directa e inversa, siendo de aplicación, por tanto, la teoría de lapotencia reactiva elegida.
4.2.2 Compensación de reactiva
Para la teoría de potencia elegida es posible realizar la descomposición deintensidades tanto en el dominio del tiempo como en el de la frecuencia. Seelige esta última, pues se podrá diseñar las características del compensador enfunción de las de la carga.
En regímenes senoidales, con la compensación de la potencia reactiva seconsigue un incremento del factor de potencia. En el caso no senoidal esto nosiempre sucede, debido a que aparece un término de potencia distorsionante. Elfactor de potencia, dadas las potencias en el dominio de Park, puede expresarsecomo:
� =Ppp
P 2p +Q2
p +D2p
(4.1)
Para maximizar el factor de potencia se deberán minimizar la potencia reactivay la distorsionante: Q2
p + D2p. Si se compensa con elementos almacenadores
de energía pasivos no todos los términos de la potencia distorsionante puedenser compensados. Tan solo podrán compensarse los que están formados porarmónicos ortogonales a la tensión. Dado que la potencia distorsionante es:
D2p = U2(I2s + I2rs + I2f ) (4.2)
49

Capítulo 4 Compensación mediante �ltros pasivos
Figura 4.1: Esquema uni�lar y equivalente armónico de una instalación industrial.
el único término compensable por este método es U2I2rs, ya que Is está formadopor armónicos en fase con la tensión e If está compuesto por armónicos que noestán presentes en la tensión. Por otra parte, se puede considerar que el valore�caz de la tensión no va a sufrir grandes modi�caciones con independenciadel compensador que se añada, por lo que la función a minimizar se puedeexpresar como:
f = I2q + I2rs = I2r (4.3)
En una instalación industrial se tienen cargas lineales y no lineales. Las li-neales se pueden modelar mediante una admitancia y las no lineales por fuentesde intensidad a las frecuencias a las que generan los armónicos. En la Figura4.1 se muestra el esquema de una instalación industrial y el circuito equivalen-te para un armónico. Dicha instalación está compuesta por un transformadorque alimenta a unas cargas lineales, simbolizadas en el esquema uni�lar por unmotor, y no lineales, representadas por el recti�cador. Al construir el circuitoequivalente para cada armónico, la red y el transformador se sustituyen por suimpedancia equivalente Zs, el motor, al ser una carga lineal, por Zl y la cargano lineal por una fuente que inyecta la corriente para dicha frecuencia.
Dada una tensión de alimentación en bornas de la carga, las cargas linea-les consumen una intensidad con los mismos órdenes de armónicos que ésta,mientras que las cargas no lineales además de estos armónicos, pueden gene-rar otros no presentes en la fuente de tensión. En el caso más general, si sedenomina Nu al conjunto de armónicos comunes a tensión e intensidad, y Ni
al conjunto de armónicos presentes sólo en la intensidad, la intensidad con-sumida por las cargas lineales estará formada por los órdenes contenidos enNu, mientras que las cargas no lineales contendrán los órdenes Nu y Ni. La
50

Compensación mediante �ltros pasivos
Figura 4.2: Compensación de reactiva mediante métodos pasivos.
intensidad demandada por el conjunto puede expresarse como:
is(t) =Xk2Nu
[(Glk + jBlk)U k � Igk] ejk!t �
Xk2Ni
Igkejk!t (4.4)
Por otra parte, en este tipo de instalaciones industriales, las cargas consumenpotencia reactiva, por lo que los compensadores suelen ser condensadores o�ltros pasivos sintonizados en un determinado armónico. La susceptancia deun condensador para un determinado armónico puede ser expresada en funciónde su capacidad y del orden de armónico:
Bck = jk!C (4.5)
Lo mismo puede hacerse para un �ltro pasivo, apareciendo también en dichaexpresión la frecuencia de sintonización kh:
Bck =jk!C
1� (k=kh)2(4.6)
Si se añade un compensador ideal pasivo, condensador o �ltro, como se indicaen la Figura 4.2, las componentes de intensidad ortogonales a la tensión severán modi�cadas:
i(t) =Xk2Nu
[(Gk + j(Blk +Bck(C)))Uk � Igk] ejk!t �
Xk2Nf
Igkejk!t (4.7)
51

Capítulo 4 Compensación mediante �ltros pasivos
Figura 4.3: Descomposición ortogonal de la intensidad sobre la tensión.
Esta intensidad puede descomponerse ortogonalmente según (3.102), siendola función que se desea minimizar:
I2r =Xk2Nu
I2kr =Xk2Nu
[(Blk +Bck(C))Uk � Igkr]2 (4.8)
donde Igkr es la proyección de Igk sobre la dirección ortogonal a Uk según semuestra en la Figura 4.3.
El compensador pasivo que minimiza la intensidad reactiva, y por tantomaximiza el factor de potencia, será aquel que veri�que la expresión:
@I2r@C
= 0 (4.9)
Esta ecuación tiene solución analítica en el caso de considerar la tensión en lacarga constante, mientras que si se consideran las variaciones de la tensión dela carga debidas a la presencia del compensador, por el hecho de no despreciarla impedancia del sistema, se tendrá que recurrir a la resolución de la mismapor un método numérico.
4.2.2.1 Carga conectada a un sistema de potencia de cortocircuitoin�nita
Si puede considerarse la tensión de la carga constante, el cálculo del compen-sador que maximiza el factor de potencia es sencillo, ya que la ecuación que lodetermina es cuadrática en el valor de la capacidad de dicho compensador:
@I2r@C
=Xk2Nu
2 [(Blk +Bck(C))Uk � Igkr]@Bck(C)
@CUk = 0 (4.10)
52

Compensación mediante �ltros pasivos
Para el caso de compensación con un condensador y un �ltro pasivo sintonizadoal armónico kh, se obtienen las siguientes ecuaciones para la capacidad:
Copt = �
Xk2Nu
k!Uk (BlkUk � Igkr)
Xk2Nu
(k!Uk)2
(4.11)
Copt = �
Xk2Nu
k!Uk (BlkUk � Igkr)
1� (k=kh)2Xk2Nu
�k!Uk
1� (k=kh)2
�2 (4.12)
Si se está compensando la potencia reactiva mediante un banco de m �ltrossintonizados a los armónicos kh1; : : : ; khm , se tendrá que resolver un sistemade m ecuaciones lineales:X
k2Nu
mXl=1
(k!Uk)2Cl�
1� (k=khl)2� �1� (k=khi)
2� = �Xk2Nu
k!Uk (BlkUk � Igkr)
1� (k=khi)2 (4.13)
donde i es un índice que varía de 1 a m. Expresado de forma matricial, elsistema de ecuaciones anterior es:
A
264C1...Cm
375 = b (4.14)
donde
A =
2664
P (k!Uk)2
(1�(k=kh1)2)2 : : :
P (k!Uk)2
(1�(k=khm)2)(1�(k=kh1)2)
.... . .
...P (k!Uk)2
(1�(k=kh1)2)(1�(k=khm)2): : :
P (k!Uk)2
(1�(k=khm)2)2
3775 (4.15)
b = �
26664P k!Uk(BlkUk�Igkr)
1�(k=kh1)2
...P k!Uk(BlkUk�Igkr)1�(k=khm)2
37775 (4.16)
Para todos estos casos, al ser la función a minimizar cuadrática, el proble-ma tiene solución única, que puede ser obtenida analíticamente mediante lasexpresiones anteriores (4.11)-(4.13).
53
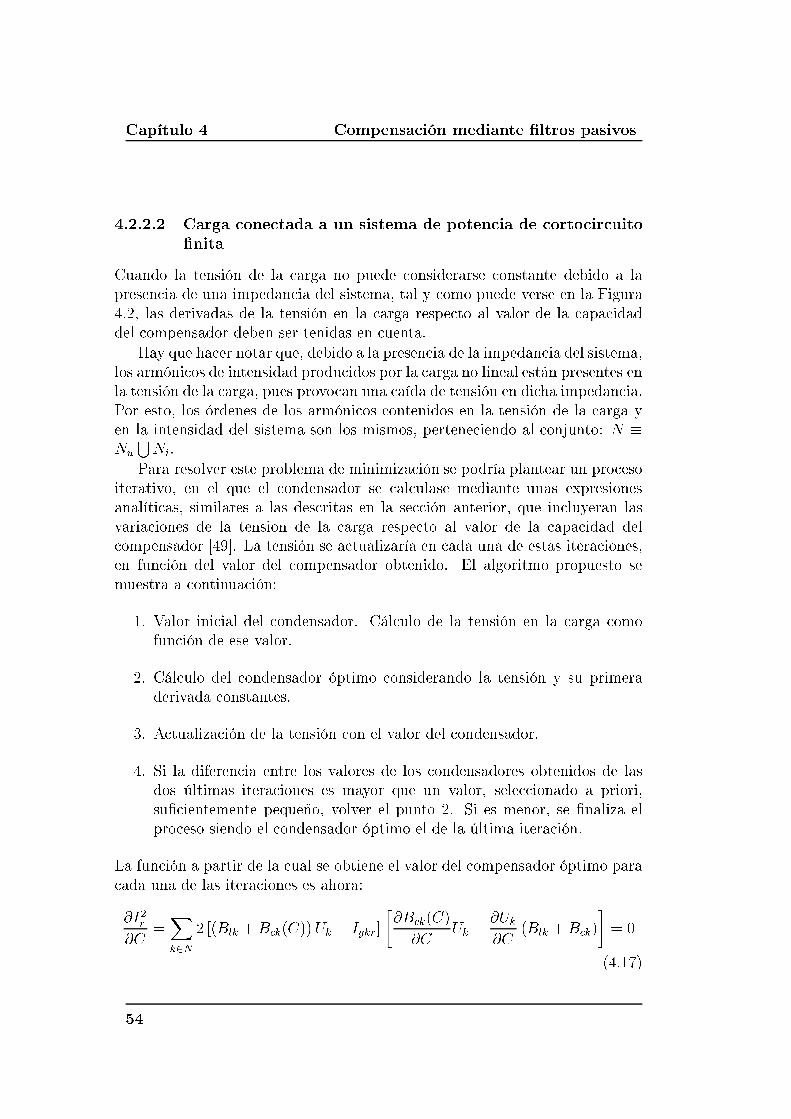
Capítulo 4 Compensación mediante �ltros pasivos
4.2.2.2 Carga conectada a un sistema de potencia de cortocircuito�nita
Cuando la tensión de la carga no puede considerarse constante debido a lapresencia de una impedancia del sistema, tal y como puede verse en la Figura4.2, las derivadas de la tensión en la carga respecto al valor de la capacidaddel compensador deben ser tenidas en cuenta.
Hay que hacer notar que, debido a la presencia de la impedancia del sistema,los armónicos de intensidad producidos por la carga no lineal están presentes enla tensión de la carga, pues provocan una caída de tensión en dicha impedancia.Por esto, los órdenes de los armónicos contenidos en la tensión de la carga yen la intensidad del sistema son los mismos, perteneciendo al conjunto: N �Nu
SNi.
Para resolver este problema de minimización se podría plantear un procesoiterativo, en el que el condensador se calculase mediante unas expresionesanalíticas, similares a las descritas en la sección anterior, que incluyeran lasvariaciones de la tension de la carga respecto al valor de la capacidad delcompensador [49]. La tensión se actualizaría en cada una de estas iteraciones,en función del valor del compensador obtenido. El algoritmo propuesto semuestra a continuación:
1. Valor inicial del condensador. Cálculo de la tensión en la carga comofunción de ese valor.
2. Cálculo del condensador óptimo considerando la tensión y su primeraderivada constantes.
3. Actualización de la tensión con el valor del condensador.
4. Si la diferencia entre los valores de los condensadores obtenidos de lasdos últimas iteraciones es mayor que un valor, seleccionado a priori,su�cientemente pequeño, volver el punto 2. Si es menor, se �naliza elproceso siendo el condensador óptimo el de la última iteración.
La función a partir de la cual se obtiene el valor del compensador óptimo paracada una de las iteraciones es ahora:
@I2r@C
=Xk2N
2 [(Blk +Bck(C))Uk � Igkr]
�@Bck(C)
@CUk +
@Uk
@C(Blk +Bck)
�= 0
(4.17)
54

Compensación mediante �ltros pasivos
Particularizando esta ecuación para el caso del condensador, y agrupando tér-minos, se obtiene una ecuación cuadrática:
�C2 + �C + = 0 (4.18)
donde �, �, se consideran constantes para cada iteración, dependiendo delvalor de la tensión en la carga y de sus derivadas:
� =Xk2N
k2!2@U2k
@C(4.19)
� =Xk2N
k2!2U2k + 2
Xk2N
Blkk!@U2
k
@C�Xk2N
Igkrk!1
Uk
@U2k
@C(4.20)
= �2Xk2N
Igkr
�k!Uk +
Bk
2Uk
@U2k
@C
�+ 2
Xk2N
Blkk!U2k +
Xk2N
B2lk
@U2k
@C(4.21)
Sin embargo, este método no es adecuado debido a que la presencia de lasderivadas de la tensión en la carga hacen que la función objetivo sea fuerte-mente no lineal, dejando de ser válida la aproximación cúbica que se realizaen cada iteración al suponer las tensiones y sus derivadas constantes. Esto seilustra en el ejemplo propuesto en la Figura 4.4.
Representando grá�camente el valor e�caz de la intensidad reactiva frenteal valor de la capacidad del condensador se puede observar el carácter no linealde dicha función, lo cual plantea dos problemas:
� El método iterativo propuesto no es de aplicación, ya que es poco proba-ble que se alcance el óptimo, salvo que la búsqueda se inicie muy cercade la solución. En la Figura 4.5 se muestran los sucesivos valores de lacapacidad del condensador aplicando el proceso iterativo y las funcio-nes objetivo particularizadas para cada uno de esos valores, en caso deconsiderar la tensión y sus derivadas constantes.
� La solución al problema deja de ser única, existiendo más de un mínimolocal. En la Figura 4.4 puede apreciarse que éstos mínimos están situadosentre dos máximos. Dichos máximos se producen para los valores de lascapacidades de los condensadores que generan las resonancias para lasfrecuencias de los armónicos del sistema.
Para resolver este problema debe aplicarse un método numérico a la ecua-ción (4.17) que tenga en cuenta las segundas derivadas de la tensión. Este
55
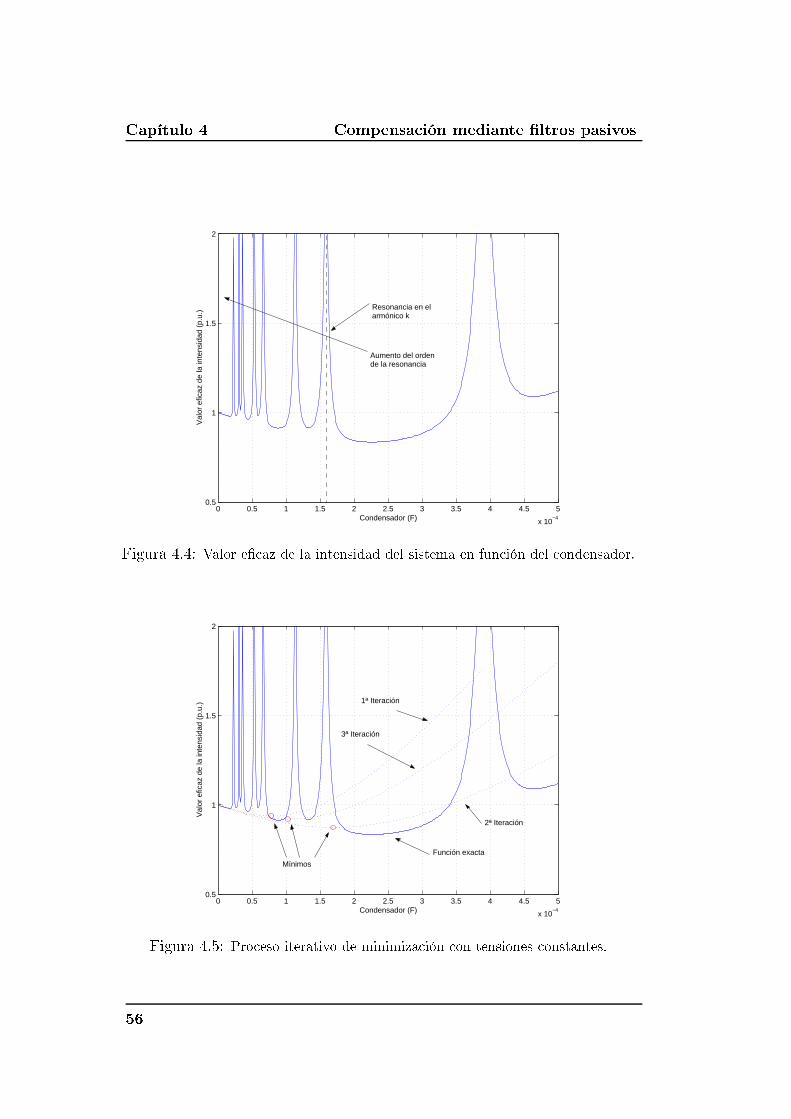
Capítulo 4 Compensación mediante �ltros pasivos
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10−4
0.5
1
1.5
2
Condensador (F)
Val
or e
ficaz
de
la in
tens
idad
(p.
u.) Resonancia en el
armónico k
Aumento del ordende la resonancia
Figura 4.4: Valor e�caz de la intensidad del sistema en función del condensador.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10−4
0.5
1
1.5
2
Condensador (F)
Val
or e
ficaz
de
la in
tens
idad
(p.
u.) 1ª Iteración
2ª Iteración
3ª Iteración
Función exacta
Mínimos
Figura 4.5: Proceso iterativo de minimización con tensiones constantes.
56

Compensación mediante �ltros pasivos
método podría ser el de Newton, el cual busca la solución de la ecuación apartir de una solución inicial mediante aproximaciones lineales en los sucesivospuntos del proceso iterativo. Para el caso de una sola variable:
x(k+1) = x(k) � f(x(k))
f 0(x(k))(4.22)
En este caso, tal y como se desprende de la Figura 4.4, los mínimos seencuentran entre los valores de las capacidades de los condensadores que creanlas resonancias para los armónicos existentes en el sistema. Dichas resonanciaspueden ser consideradas como restricciones. En este sentido, el cálculo delmínimo debe restringirse a las zonas delimitadas por estas fronteras. Dadoque el método de Newton realiza una aproximación lineal en un punto dela función que se desea minimizar, no se tiene ninguna garantía de que lossucesivos puntos de este algoritmo estén dentro de la zona, delimitada por lasrestricciones, en la que estamos interesados encontrar el mínimo. Por estosmotivos, se aplicará un algoritmo de punto interior para calcular los mínimosde la función a estudiar [40], [82], [9], [81].
4.2.3 Algoritmo de punto interior
Considérese que se desea minimizar la función monovariable dependiente de lavariable C que se muestra en la Figura 4.6, en una región delimitada por larestricción C > 0. En la iteración k-esima se calcula la derivada de la funciónen el punto C(k), obteniendo a partir de ella la nueva solución C(k+1). Sinembargo, esta solución está fuera de la zona analizada.
Una posible solución para asegurar que siempre se está buscando el óptimoen la región correcta, es aplicar un método de punto interior como el algoritmoprimal-dual de barrera logarítmica. Básicamente este algoritmo consiste enmodi�car la función objetivo añadiendo un término que penaliza la proximidada una frontera que marca un límite de la zona en la que se busca el óptimo,limitando además los incrementos de la variable en cada iteración con el �n deque el valor permanezca siempre en la región factible, pues el logaritmo estáde�nido sólo en ésta. Para el ejemplo de la Figura 4.6, dada la función objetivooriginal f , la modi�cada, F , se escribe como:
F = f � � lnC (4.23)
donde � es un parámetro denominado factor de penalización. Tal y comopuede verse en la Figura 4.6, con la función modi�cada es imposible salirse de
57

Capítulo 4 Compensación mediante �ltros pasivos
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
C
Región factible
Función objetivomodificada
Función objetivo
Barrera logarítmica
C lim C C k+1 k
Figura 4.6: Fundamento de los métodos de punto interior de barrera logarítmica.
la región deseada, pues la penalización hace aumentar la función modi�cadacerca de la barrera, impidiendo que ese límite se rebase.
Este factor de penalización se hará decrecer conforme el número de itera-ciones aumente, de forma que al �nal del proceso iterativo su in�uencia en lafunción original sea despreciable. Por tanto, existirán dos procesos iterativos:uno externo, en el que se va a buscar el óptimo de la función original, y otrointerno, en el que se buscará el óptimo de la función modi�cada para un valorde � determinado, si bien en la práctica sólo se suele realizar una iteración deeste último.
4.3 Optimización mediante técnicas de punto in-terior
En esta sección se describirán las técnicas de punto interior aplicadas a laoptimización de compensadores pasivos de potencia reactiva. Tal y como seha visto anteriormente, el objetivo es buscar una serie de mínimos locales enunas regiones prede�nidas, delimitadas por las resonancias existentes entrela impedancia del sistema y el compensador instalado. En primer lugar, secalculan los puntos de resonancia y se determinan las zonas factibles en las quedeben ser hallados los mínimos locales. Posteriormente, se aplica el algoritmode punto interior para encontrar dichos mínimos locales. Por último, se deberá
58

Compensación mediante �ltros pasivos
encontrar el mínimo absoluto por comparación de todos los mínimos localesobtenidos.
Primero se expondrá el problema de la compensación de potencia reactivacon un condensador o un �ltro pasivo sintonizado en el armónico kh. Posterior-mente se extenderá el algoritmo a la compensación mediante banco de �ltrossintonizados.
4.3.1 Compensación con �ltro pasivo o condensador
4.3.1.1 Determinación de las resonancias
Las resonancias que se producen entre la impedancia del sistema y el compen-sador pasivo de reactiva a instalar vienen determinadas por la expresión:
@I2sk@C
= 0 k > 1 (4.24)
donde Isk es el valor e�caz del armónico k-esimo de la intensidad del sistema,el cual dependerá del tipo de compensador instalado. En general, la ecuaciónresultante es de segundo orden:
H(Blk +Bck)2 + L(Blk +Bck) +M = 0 (4.25)
donde H, L y M son constantes que dependen de la tensión en la carga, lacorriente generada por la parte no lineal de la carga, la impedancia del sistemay la conductancia de la parte lineal de la carga, tal y como se muestra en lassiguientes ecuaciones:
H = IgkrUk(R2sk +X2
sk)� U2kXsk (4.26)
L = U2k (1 + 2RskGlk)� (R2
sk +X2sk)(I
2gk � 2UkGlkIgka) (4.27)
M = �IgkrUk
�1 + (RskGlk)
2 + 2RskGlk + (XskGlk)2�+
+ Xsk
�(UkGlk)
2 + I2gk � 2UkGlkIgka�
(4.28)
Una vez obtenido el valor de Blk + Bck que es solución de (4.25), al que sellamará Ak, se calcula el valor del condensador que de�ne la resonancia. Estevalor depende de la naturaleza del compensador instalado:
� Batería de condensadores:
Crk =Ak � Blk
k!(4.29)
59

Capítulo 4 Compensación mediante �ltros pasivos
� Filtro sintonizado al armónico kh:
Crk =Ak � Blk
k!1�(k=kh)2
(4.30)
Los condensadores que crean las resonancias son más pequeños cuanto ma-yor es el orden de armónico, es decir, que en la Figura 4.4, los valores de loscondensadores cerca del origen crean las resonancias para los armónicos demayor orden. Por otra parte, hay que tener en cuenta que en el caso de com-pensación con �ltro sintonizado a una frecuencia �ja kh, las resonancias sóloson posibles para armónicos por debajo de la frecuencia de sintonización, yaque para frecuencias superiores el �ltro se comporta como una inductancia.
Una vez que se tienen los valores de la capacidad de los condensadoresque producen la resonancia para cada uno de los armónicos considerados, setiene que minimizar la componente reactiva de la intensidad en el intervalocomprendido entre dos resonancias.
4.3.1.2 Formulación del problema
Para encontrar el mínimo de la intensidad reactiva en el intervalo comprendidoentre dos condensadores que producen resonancias, es necesario recurrir a unmétodo numérico como el Newton-Raphson. El problema es que dicho métodoiterativo se basa en sucesivas aproximaciones lineales de la función objetivo,no existiendo ninguna garantía de que se esté buscando la solución siempredentro del intervalo seleccionado. Para salvar estos inconvenientes se recurreal algoritmo primal-dual de punto interior y barrera logarítmica. El problemase formula de la siguiente forma:
minC
I2rs (4.31)
sujeto a C < Ck (4.32)
C > Ch (4.33)
donde Ck es el condensador que crea la resonancia para el armónico de ordeninferior de los dos considerados, y que actúa como cota superior y Ch es el quecrea la resonancia para el armónico de orden superior, siendo una cota inferior.Las desigualdades que aparecen en el planteamiento del problema pueden ser
60

Compensación mediante �ltros pasivos
transformadas en igualdades introduciendo unas variables de holgura ss y si:
minC
I2rs (4.34)
sujeto a C � Ck + ss = 0 (4.35)
Ch � C + si = 0 (4.36)
Dichas holguras ss, correspondiente a una restricción de cota superior, y si,cota inferior, son variables que siempre deben permanecer positivas si se deseabuscar el mínimo dentro de la región especi�cada.
Si se aplica la barrera logarítmica al problema planteado en las ecuaciones(4.34)-(4.36), la función lagrangiana toma la forma:
L = I2rs + �(C � Ck + ss) + �(Ch � C + si)� �(ln ss + ln si) (4.37)
donde � es un factor de penalización positivo que debe disminuir conforme elproceso iterativo avanza. La manera en la que este parámetro decrece duranteel proceso iterativo se analizará posteriormente en la Sección 4.4 del presentecapítulo.
Las condiciones de optimalidad de primer orden para el problema planteadollevan a las siguientes ecuaciones:
@L
@C=
@I2rs@C
+ �� � = 0 (4.38)
@L
@�= C � Ck + ss = 0 (4.39)
@L
@�= Ch � C + si = 0 (4.40)
@L
@ss= �� �
ss= 0) ss� = � (4.41)
@L
@si= � � �
si= 0) si� = � (4.42)
Dado que � y las holguras ss y si deben ser positivos, los multiplicadoresde Lagrange asociados, � y �, deben ser estrictamente positivos durante elproceso iterativo, por las ecuaciones (4.42)-(4.41). A partir de este momentoestas variables serán referidas como holguras duales.
Las ecuaciones (4.38)-(4.42) se resuelven normalmente con una única itera-ción del método de Newton, pues se está resolviendo un problema modi�cado yno se consigue ninguna ventaja con resolver el problema alterado por las barre-ras logarítmicas de forma exacta. Esta resolución puede incluir un esquema
61

Capítulo 4 Compensación mediante �ltros pasivos
predictor-corrector [81], si bien en nuestro caso no ha llegado a ser necesariopor ser el problema de pequeña dimensión. El sistema de ecuaciones a resolver,resultante de aplicar el método de Newton a las ecuaciones (4.38)-(4.42) es elsiguiente:2
66664
@2I2rs@C2 1 �1 0 01 0 0 1 0�1 0 0 0 10 ss 0 � 00 0 si 0 �
377775
2666644C4�4�4ss4si
377775 = �
266664
@I2rs@C
+ �� �C � Ck + ssCh � C + siss�� �si� � �
377775 (4.43)
A la vista del sistema de ecuaciones, (4.43), se hace necesario calcular laprimera y segundas derivadas de la intensidad reactiva al cuadrado:
@I2r@C
=Xk2N
2 [(Blk +Bck)Uk � Igkr]
�@Bck
@CUk +
@Uk
@C(Blk +Bck)
�(4.44)
@2I2r@C2
=Xk
�@Bck
@CUk + (Blk +Bck)
@Uk
@C
�2+
+ [(Blk +Bck)Uk � Igkr]
�2@Bck
@C
@Uk
@C+ (Bck +Blk)
@2Uk
@C2
�(4.45)
Dado que la presencia de la impedancia del sistema hace que la tensión en lacarga no sea constante, también es necesario calcular las derivadas de dichatensión respecto a la capacidad del compensador:
U2k =
jUk +ZsIgkj2j1 +Zs(Y c + Y l)j2
(4.46)
@U2k
@C= 2
U4k [Xsk � Z2
sk(Blk +Bck))]@Bck
@C
[Uk +RskIgka �XskIgkr]2 + [XskIgka +RskIgkr]
2 (4.47)
@2U2k
@C2=
4U2k@U2
k
@C[Xsk � Z2
sk(Blk +Bck)]@Bck
@C� 2U4
kZ2sk
�@Bck
@C
�2[Uk +RskIgka �XskIgkr]
2 + [XskIgka +RskIgkr]2 (4.48)
Dado que en (4.44) se tiene expresada en función de las variaciones detensión respecto a la capacidad del condensador, hay que calcular la relaciónexistente entre éstas y la derivada del cuadro del módulo de la tensión frentea la capacidad del condensador:
@Uk
@C=
1
2Uk
@U2k
@C(4.49)
62
Compensación mediante �ltros pasivos
@2Uk
@C2=
1
2Uk
@2U2k
@C2� 1
4U3k
�@U2
k
@C
�2
(4.50)
Las ecuaciones planteadas anteriormente son válidas para la compensación concondensador y �ltro sintonizado, tomando la derivada de la susceptancia lossiguientes valores:
� Batería de condensadores@Bck
@C= k! (4.51)
� Filtro pasivo sintonizado al armónico kh:
@Bck
@C=
k!
1� (k=kh)2(4.52)
4.3.2 Compensación con banco de �ltros sintonizados
4.3.2.1 Determinación de las resonancias
En caso de estar utilizando un banco de N �ltros con frecuencias de sintoniza-ción �jas, la expresión que determina la resonancia del sistema es idéntica alcaso de compensación con un �ltro, (4.24), por lo que se llega a la ecuación desegundo orden (4.25) para la determinación de Blk +Bck. Es entonces cuandose puede calcular la susceptancia del compensador que provoca la resonanciadel sistema. La resonancia en este caso está caracterizada por la siguienteecuación:
Brck = Ak � Blk (4.53)
donde Ak es la solución de la ecuación (4.25). La susceptancia del compensa-dor que produce una resonancia en el armónico k-esimo se puede expresar enfunción del orden de los armónicos a los que están sintonizados los N �ltrosque lo componen, khj y las capacidades de los condensadores de dichos �ltros,Cj:
Brck =NXj
k!Cj
1� (k=khj)2= Ak � Blk (4.54)
Dado que las frecuencias de sintonización son �jas, esta ecuación de�ne unhiperplano que relaciona los valores de las capacidades de los condensadoresde cada uno de los �ltros. Todos los puntos que están contenidos en el mismo,valores de condensadores que veri�can (4.54), producen una resonancia enel sistema para el armónico k-esimo. En este sentido, la minimización dela componente reactiva de la intensidad respecto a los N condensadores que
63

Capítulo 4 Compensación mediante �ltros pasivos
componen el banco de �ltros, se realizará en una región del espacio RN que seencontrará delimitada por hiperplanos de resonancia.
Al igual que sucede en el caso de compensación con un solo �ltro, no seproducen resonancias para todos los órdenes de armónicos. Para ilustrar es-te hecho y clari�car ciertas propiedades de estos hiperplanos, en la siguientesección se estudiarán las resonancias para el caso de compensación con dos�ltros.
4.3.2.2 Resonancias: banco de dos �ltros
Al compensar con un banco de dos �ltros pasivos el problema pasa a ser bidi-mensional. Esta simpli�cación permite realizar una representación grá�ca delos hiperplanos de resonancia, que en este caso serán rectas que relacionan losvalores de las capacidades de los condensadores de cada �ltro. La ecuación deresonancia producida por un banco de dos �ltros para el armónico k-esimo es:
k!
1� (k=khs)2Cs +
k!
1� (k=khi)2Ci = Ak � Blk (4.55)
donde khs y Cs corresponden al �ltro de frecuencia de sintonización más altay khi y Ci al �ltro de frecuencia de sintonización más baja. Si se expresa elvalor de Ci en función de Cs:
Ci = �1� (k=khi)2
1� (k=khs)2Cs + (Ak �Blk)
1� (k=khi)2
k!= mCs + n (4.56)
Dependiendo de la relación existente entre los armónicos sintonizados y elarmónico para el que se estudia la resonancia tendremos distintos valores dem y n:
� Pendiente m. Puede tener valores positivos o negativos:
k < khi < khs =) m < 0 (4.57)
khi < k < khs =) m > 0 (4.58)
khi < khs < k =) m < 0 (4.59)
� Término independiente n:
Ak � Blk > 0 khs > kAk � Blk < 0 khs < k
�=) n > 0 (4.60)
Ak � Blk < 0 khs > kAk � Blk > 0 khs < k
�=) n < 0 (4.61)
64
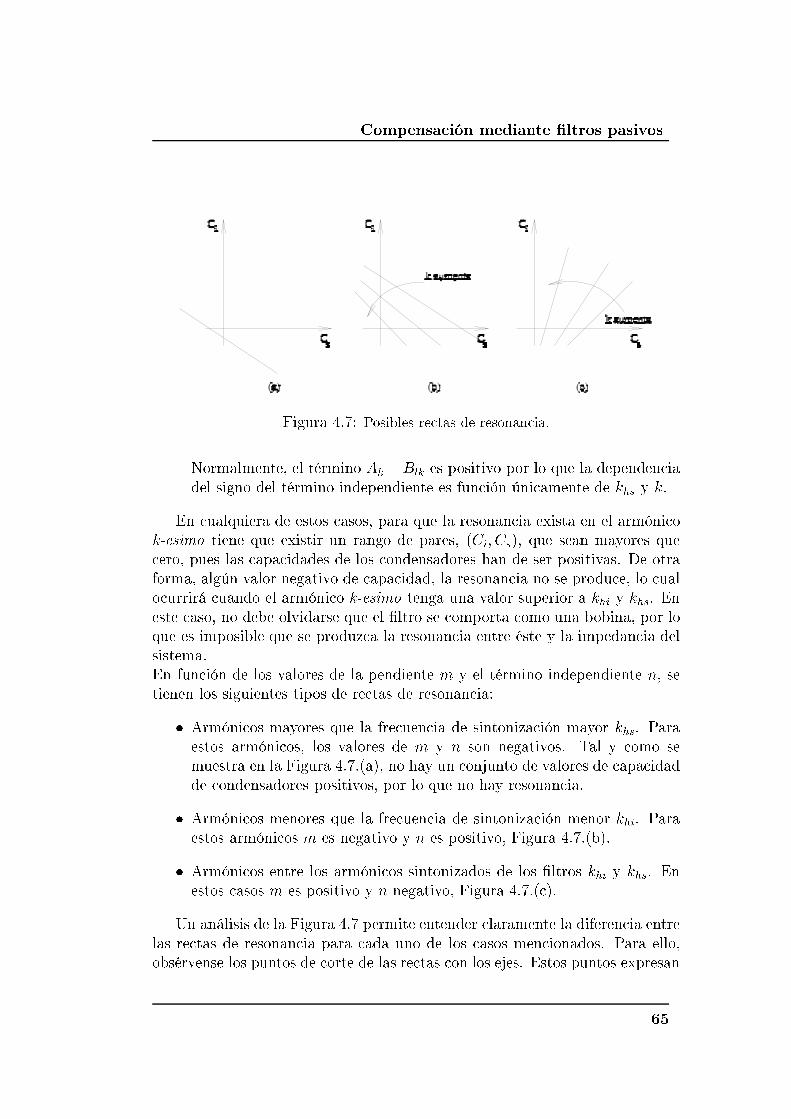
Compensación mediante �ltros pasivos
Figura 4.7: Posibles rectas de resonancia.
Normalmente, el término Ak �Blk es positivo por lo que la dependenciadel signo del término independiente es función únicamente de khs y k.
En cualquiera de estos casos, para que la resonancia exista en el armónicok-esimo tiene que existir un rango de pares, (Ci; Cs), que sean mayores quecero, pues las capacidades de los condensadores han de ser positivas. De otraforma, algún valor negativo de capacidad, la resonancia no se produce, lo cualocurrirá cuando el armónico k-esimo tenga una valor superior a khi y khs. Eneste caso, no debe olvidarse que el �ltro se comporta como una bobina, por loque es imposible que se produzca la resonancia entre éste y la impedancia delsistema.En función de los valores de la pendiente m y el término independiente n, setienen los siguientes tipos de rectas de resonancia:
� Armónicos mayores que la frecuencia de sintonización mayor khs. Paraestos armónicos, los valores de m y n son negativos. Tal y como semuestra en la Figura 4.7.(a), no hay un conjunto de valores de capacidadde condensadores positivos, por lo que no hay resonancia.
� Armónicos menores que la frecuencia de sintonización menor khi. Paraestos armónicos m es negativo y n es positivo, Figura 4.7.(b).
� Armónicos entre los armónicos sintonizados de los �ltros khi y khs. Enestos casos m es positivo y n negativo, Figura 4.7.(c).
Un análisis de la Figura 4.7 permite entender claramente la diferencia entrelas rectas de resonancia para cada uno de los casos mencionados. Para ello,obsérvense los puntos de corte de las rectas con los ejes. Estos puntos expresan
65

Capítulo 4 Compensación mediante �ltros pasivos
el valor del condensador que crea la resonancia en el caso de estar compen-sando con un solo �ltro, dado que el otro condensador es cero. De esta formase observa que para el primer caso analizado los puntos de corte son valoresnegativos, lo cual indica que no hay resonancia. En el segundo, los dos pun-tos de corte son positivos, lo cual indica que se producirían resonancias si secompensara con un solo �ltro. Esta situación es posible únicamente si los dosarmónicos sintonizados son superiores al armónico donde se estudia la reso-nancia. Para el tercer caso, existe un punto de corte positivo, correspondienteal eje del �ltro de frecuencia de sintonización mayor, y otro negativo. Clara-mente, el armónico estudiado debe estar comprendido entre los sintonizadospor los �ltros.
Por otra parte, es interesante conocer las relaciones que existen entre laspendientes y términos independientes de los distintos tipos de resonancias re-presentados en la Figura 4.7:
� Armónicos menores que los sintonizados en los �ltros. En este caso, quese muestra en la Figura 4.7.(b), el valor de la pendiente, m, es negativo,aumentando su valor absoluto con el aumento del orden de armónico;el término independiente n es positivo y disminuye con el aumento delorden de armónico.
� Armónicos entre los sintonizados en los �ltros. En esta situación, Fi-gura 4.7.(c), la pendiente de las rectas de resonancia, m, será positiva,y aumenta su valor con el orden de armónico, mientras que el términoindependiente es negativo y disminuye su valor absoluto con el aumentodel armónico.
Estas rectas delimitan las regiones en las que se tienen que buscar losmínimos locales. Si bien en el caso de compensación con un único �ltro ocondensador el número de regiones a analizar es obvio, para más de un �ltro,como se puede comprobar, dependerá del número de rectas de resonancia queaparezcan y de las intersecciones entre ellas. En este sentido, para el caso de dos�ltros, las regiones podrían ser determinadas por consideraciones geométricas.Sin embargo, este método sería muy costoso cuando el número de �ltros delbanco aumentara. En la siguiente sección se estudiará la forma en la quese determinan las zonas factibles. De nuevo, para clari�car la exposición, seaplicará al caso de compensación con un banco de dos �ltros, siendo fácilmenteextrapolable a un número mayor.
66

Compensación mediante �ltros pasivos
Figura 4.8: Regiones que crea una resonancia en el caso bidimensional.
4.3.2.3 Determinación de las zonas factibles
Una región factible es una parte del espacio RN que cumple un conjunto de
restricciones coherentes entre sí, en la que se tiene que buscar el mínimo localde la función a minimizar, que para este caso es la intensidad reactiva. Estasregiones factibles están delimitadas por los hiperplanos de resonancia. Engeneral, el problema es cómo determinar las regiones factibles existentes apartir del conjunto de dichos hiperplanos.
Si se analiza el caso bidimensional, se puede comprobar que las rectas deresonancia dividen al plano en dos regiones. Las rectas de resonancia vendránde�nidas por una expresión del tipo:
aCi + bCs + d = 0 (4.62)
Los puntos no pertenecientes a la recta toman para la ecuación anterior va-lores positivos o negativos, dependiendo de su posición respecto a ésta. Si elcoe�ciente a, que multiplica al condensador del �ltro de menor frecuencia desintonización, es positivo, dichos valores son los que se indican en la Figura4.8.
Una región vendrá dada por un sistema de desigualdades del tipo:
ajCi + bjCs + dj 7 0 j = 1 : : :m (4.63)
Dado que cada restricción divide al plano en dos regiones, el número máximode zonas que pueden aparecer con estas m restricciones es 2m. Sin embargo,no todas estas regiones van a ser factibles. Para estudiar si una determinada
67

Capítulo 4 Compensación mediante �ltros pasivos
región es válida, se añaden a las ecuaciones unas variables de holgura, sj,estrictamente positivas:
ajCi + bjCs + dj � sj = 0 sj > 0 j = 1 : : :m (4.64)
Este sistema de ecuaciones puede escribirse de forma matricial como:
264
a1 b1...
...am bm
��������1 : : : 0...
. . ....
0 : : : �1
3752666664
Cs
Ci
s1...sm
3777775 = �
264b1...bm
375 (4.65)
Aamp x = �d (4.66)
Claramente el sistema anterior es indeterminado, m� (m+2), pero puederesolverse si se igualan ciertas variables a cero, convirtiéndose el sistema endeterminado. Igualar algunas variables a cero equivale a eliminar las columnasque multiplican a dichas variables. Es decir, que de la matriz Aamp se obtieneotra A de dimensión m�m, tal que:
xB = �A�1d (4.67)
La solución del sistema indeterminado estará compuesta de la solución delsistema anterior más las variables que se han igualado a cero:
x = [xB 0] (4.68)
Dado que las capacidades de los condensadores y las holguras tienen que serpositivos, para que la región sea factible, la solución del sistema de ecuaciones(4.67) debe ser mayor que cero. En caso que esto no ocurra, se tiene quetomar otro conjunto de m variables de las (m + 2) posibles. Por tanto, en elpeor de los casos, el número máximo de sistemas a resolver para comprobar lafactibilidad de una región es:
número de sistemas =
�m+ 2m
�(4.69)
El algoritmo que se plantea entonces para determinar las soluciones facti-bles en caso de compensar con N �ltros a partir de un conjunto de m restric-ciones es el siguiente:
68

Compensación mediante �ltros pasivos
Figura 4.9: Casos en los que no se produce intersección de las resonancias.
1. Desde j=1 al número máximo de regiones factibles: 2m
1.1. Seleccionar una región y determinar la matriz ampliada: Aamp
1.2. Desde k=1 a
�m +Nm
�1.1.1. Formar la matriz A a partir de Aamp eliminado N columnas y
resolver el sistema:
AxB = �d (4.70)
1.1.2. Si la solución del sistema anterior, xB es positiva, signi�ca quetodos las capacidades de los condensadores y las holguras sonpositivas, por lo que la región se marca como factible y se vuelveal punto 1.1. En caso contrario se vuelve al punto 1.1.1.
Es posible que a la salida de este algoritmo no se haya determinado ningunaregión factible, indicando entonces que no existen puntos de corte entre lasrectas de resonancia. Esta circunstancia indica que o todos los armónicos soninferiores a las frecuencias de sintonización de los �ltros, como se indica enla Figura 4.9.(a) o bien están entre ellas, como en la Figura 4.9.(b). En estecaso especial, aunque existen puntos de corte, pues las rectas de resonancia noson paralelas entre sí, estos se encuentran fuera del primer cuadrante, por loque algún valor de los condensadores es negativo. En cualquiera de las casosanteriores es sencillo calcular las zonas factibles, siendo éstas las comprendidasentre las rectas de resonancia.
69

Capítulo 4 Compensación mediante �ltros pasivos
4.3.2.4 Formulación del problema
Una vez que se han encontrado las regiones factibles existentes, el objetivo esbuscar los mínimos locales de las mismas, al igual que se hizo en el caso de unaúnica variable. Las regiones factibles estarán limitadas por los hiperplanos deresonancia. En general, estas restricciones pueden ser cota superior o inferiorpara los valores de las capacidades de los condensadores de los �ltros. Elconjunto de ms hiperplanos que actúa como cota superior, puede expresarsede la forma matricial que sigue:
AsC +Bs < 0 (4.71)
donde As es una matrizms�N , C es un vector N�1 y Bs es un vector ms�1.De igual manera se pueden agrupar las mi restricciones que expresan una cotainferior:
AiC +Bi > 0 (4.72)
donde Ai es una matriz mi�N , C es un vector N�1 y Bi es un vector mi�1.El problema de minimización de la intensidad reactiva en una región deli-
mitada por unos hiperplanos puede ser entonces planteado en forma compactade la siguiente forma:
minC
I2rs (4.73)
sujeto a AsC +Bs < 0 (4.74)
AiC +Bi > 0 (4.75)
Si se añaden dos vectores de variables auxiliares, xs de dimensión ms� 1 yxi de tamaño mi � 1, el problema se transforma de la siguiente forma:
minC
I2rs (4.76)
sujeto a xs + (AsC +Bs) = 0 (4.77)
xi � (AiC +Bi) = 0 (4.78)
xs > 0 (4.79)
xi > 0 (4.80)
Con la introducción de estas variables auxiliares, xs y xi, se consigue quelas restricciones de desigualdad estén planteadas en variables del problema,evitando así las restricciones funcionales de desigualdad.
Para eliminar las desigualdades se introducen unas variables de holgura,estrictamente positivas, que tendrán las mismas dimensiones que los vectores
70

Compensación mediante �ltros pasivos
de variables auxiliares introducidos anteriormente:
minC
I2rs (4.81)
sujeto a xs + (AsC +Bs) = 0 (4.82)
xi � (AiC +Bi) = 0 (4.83)
�xs + ss = 0 (4.84)
�xi + si = 0 (4.85)
ss; si > 0 (4.86)
Aplicando la técnica de punto interior primal-dual de barrera logarítmicaal problema planteado en las ecuaciones (4.81)-(4.86) se obtiene la siguientelagrangiana:
L = I2rs + �t(xs + (AsC +Bs)) + �t(xi � (AiC +Bi)) +
+ �̂t(�xs + ss) + �̂t(�xi + si)�� �(ln ss + ln si) (4.87)
donde �, �̂ y �, �̂ son vectores de los multiplicadores de Lagrange asociados alas restricciones (4.82), (4.83) y (4.84), (4.85) que tienen dimensión ms � 1 ymi � 1 respectivamente. Las condiciones de optimalidad para el problema deoptimización planteado se expresan en forma matricial de la siguiente forma:
@L
@C=
@I2rs@C
+ �tAs � �tAi = 0 (4.88)
@L
@xs= �� �̂ = 0 (4.89)
@L
@xi= � � �̂ = 0 (4.90)
@L
@�= xs + (AsC +Bs) = 0 (4.91)
@L
@�= xi � (AiC +Bi) = 0 (4.92)
@L
@�̂= �xs + ss = 0 (4.93)
@L
@�̂= �xi + si = 0 (4.94)
@L
@ss= 0) Ss� = �e (4.95)
@L
@si= 0) Si� = �e (4.96)
71

Capítulo 4 Compensación mediante �ltros pasivos
donde e es un vector unitario de la dimensión apropiada.El factor de penalización � y las holguras ss y si son estrictamente positivas,
por lo que los vectores de multiplicadores de Lagrange �, �, �̂ y �̂ y las variablesauxiliares introducidas, xs y xi, deben ser positivos durante el proceso iterativo.
Si se aplica el método de Newton para resolver las ecuaciones anteriores,tras el cálculo del jacobiano se obtiene el siguiente sistema de ecuaciones:
26666666666664
@I2rs@C2 0 0 As �Ai 0 0 0 00 0 0 I 0 �I 0 0 00 0 0 0 I 0 �I 0 0As I 0 0 0 0 0 0 0�Ai 0 I 0 0 0 0 0 00 0 �I 0 0 0 0 I 00 0 0 �I 0 0 0 0 I0 0 0 0 0 Ss 0 � 00 0 0 0 0 0 Si 0 �
37777777777775
26666666666664
�C�xs�xi������̂
��̂�ss�si
37777777777775= �
266666666666664
@I2rs@C
+ �tAs � �tAi
�� �̂
� � �̂xs + (AsC +Bs)xi � (AiC +Bi)
�xs + ss�xi + siSs�� �eSi� � �e
377777777777775
(4.97)
En este sistema de ecuaciones se han introducido las siguientes matrices:
� I y e: matriz diagonal unidad y vector unitario de dimensiones apropia-das.
� Ss y Si: matrices diagonales de dimensión mu �mu y mi �mi respecti-vamente, que contienen las holguras.
� � y �: matrices diagonales formadas por los multiplicadores de Lagrangecorrespondientes a las restricciones de cota superior, �, e inferior, �,respectivamente.
Para concluir la construcción del sistema de ecuaciones, quedan por calcularlas derivadas de la intensidad reactiva y de la tensión en la carga respecto a lascapacidades de los condensadores de cada uno de los �ltros, que son idénticas alas expuestas en la sección anterior: ecuaciones (4.44), (4.45) y (4.47), (4.48).Los únicos términos que no se han calculado son las segundas derivadas de laintensidad reactiva y tensión en la carga respecto a capacidades de distintos�ltros:
@I2sr@Ci@Cj
= 2Xk
�@Bck
@Cj
Uk + (Blk +Bck)@Uk
@Cj
� �@Bck
@Ci
Uk +@Uk
@Ci
(Blk +Bck)
�+
72

Compensación mediante �ltros pasivos
+ 2Xk
[(Blk +Bck)Uk � Igkr]
�@2Bck
@Ci@CjUk +
@Bck
@Ci
@Uk
@Cj+
+@2Uk
@Ci@Cj(Blk +Bck) +
@Bck
@Cj
@Uk
@Ci
�(4.98)
@2U2k
@C2=
4U2k@U2
k
@Cj[Xsk � Z2
sk(Blk +Bck)]@Bck
@Ci� 2U4
kZ2sk
@Bck
@Ci
@Bck
@Cj
[Uk +RskIgka �XskIgkr]2 + [XskIgka +RskIgkr]
2 (4.99)
4.3.3 Restricciones adicionales
En las secciones anteriores se ha estudiado el problema de la minimización dela potencia reactiva en instalaciones industriales, que en el caso más generalse puede plantear por las ecuaciones (4.81)-(4.86). Ya sea en el caso de com-pensación con condensador o �ltro pasivo sintonizado, en el que el problemaes monovariable o, en el más complejo, de compensación mediante un bancode �ltro sintonizados, el problema consiste en minimizar una función en el in-terior de un conjunto de regiones. Dichas regiones tienen como fronteras lasresonancias existentes en el sistema, representadas mediante una función linealde la capacidad de los condensadores del compensador pasivo de potencia re-activa utilizado. Una vez que los mínimos locales de cada una de estas regionesha sido calculado, se está en disposición de obtener el mínimo absoluto. Sinembargo, si se analizan aspectos prácticos de la instalación de �ltros pasivosen los sistemas eléctricos, esta forma de diseño presenta dos inconvenientes:
� Uno de los principales inconvenientes que presentan los �ltros pasivos pa-ra la eliminación de armónicos en redes eléctricas, descritos en el Capítulo3, es su elevada sensibilidad a la variación de algunos de los parámetrosque de�nen su comportamiento: impedancia de la red y sus propios com-ponentes L, C. Si se analiza la impedancia equivalente desde el punto deacoplamiento del �ltro frente a la frecuencia, se puede comprobar cómoexisten unos mínimos en los armónicos en los que se sintonizan los �l-tros pasivos. Sin embargo, para frecuencias inferiores a estos armónicosaparecen unos máximos, que son los polos de la impedancia [21]. El con-trol sobre la posición de estos máximos es de capital importancia si sequiere evitar que variaciones de los parámetros del �ltro o la impedanciade la red provoquen el desplazamiento de los mismos hacia armónicosimportantes. Con este método de diseño, no se tiene la certeza de quelos máximos estén su�cientemente alejados de los mínimos.
73

Capítulo 4 Compensación mediante �ltros pasivos
� Normalmente la de�nición utilizada de potencia reactiva es la enuncia-da por Budeanu para sistemas con tensiones senoidales y cargas linealesen régimen permanente. Por otra parte, según la legislación españolavigente [25], [24], no debe existir ningún consumo con factor de poten-cia capacitivo. Esto se debe a que la medida de la potencia de reactivase realiza considerando que tanto las tensiones como intensidades queexisten en los sistemas eléctricos son magnitudes senoidales en regimenpermanente. Con la formulación realizada, se está minimizando la po-tencia reactiva, o maximizando el factor de potencia de�nido por (4.1),pero no se tienen garantías de que dicha potencia reactiva en el armónicofundamental no sea capacitiva.
Para solventar estos problemas y adaptar el método propuesto a estos re-querimientos se proponen las soluciones presentadas en las siguientes secciones.
4.3.3.1 Introducción de resonancias �cticias
El objetivo que se persigue es inmunizar el comportamiento del banco de �ltrosante la posible variación de los parámetros que de�nen su comportamiento.Para ello, se deben controlar los polos o máximos de la impedancia equivalentevista desde el punto de conexión del �ltro.
Dado un diseño del banco de �ltros pasivos mediante el proceso de optimi-zación planteado, se puede representar cualquiera de las ganancias de�nidasen [21] y comentadas en el Capítulo 3. Considérese el caso de compensacióncon un banco formado por dos �ltros pasivos. Si para este caso se representala impedancia equivalente desde el punto de conexión de los �ltros frente a lafrecuencia, aparecen unos máximos que indican la ampli�cación que se produceen las tensiones de la carga debidas a los armónicos de intensidad generadospor la carga no lineal, y unos mínimos a las frecuencias de sintonización de los�ltros. Esta impedancia corresponde a los valores elegidos de la capacidad delos condensadores, existiendo una relación entre éstos y dicha impedancia. Eneste sentido, al tratarse de un problema bidimensional, se pueden representarlas capacidades de los condensadores sobre el plano, de�niendo así el puntode diseño. Por otra parte, es interesante recordar que las resonancias en elcaso bidimensional pueden ser representadas en el plano mediante rectas cuyaforma depende del armónico en el cual se produce la resonancia respecto alos armónicos sintonizados por los �ltros. Al estar analizando la impedanciadesde el punto de conexión de los �ltros respecto a la frecuencia, las rectas de
74
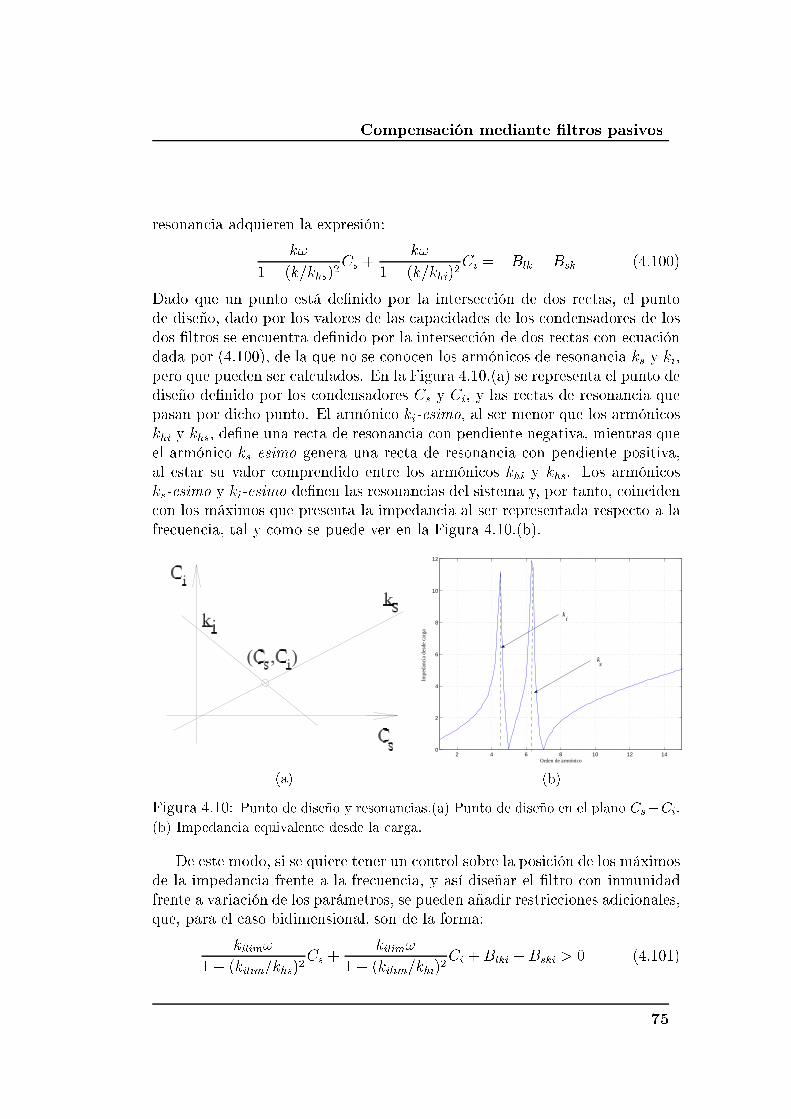
Compensación mediante �ltros pasivos
resonancia adquieren la expresión:
k!
1� (k=khs)2Cs +
k!
1� (k=khi)2Ci = �Blk � Bsk (4.100)
Dado que un punto está de�nido por la intersección de dos rectas, el puntode diseño, dado por los valores de las capacidades de los condensadores de losdos �ltros se encuentra de�nido por la intersección de dos rectas con ecuacióndada por (4.100), de la que no se conocen los armónicos de resonancia ks y ki,pero que pueden ser calculados. En la Figura 4.10.(a) se representa el punto dediseño de�nido por los condensadores Cs y Ci, y las rectas de resonancia quepasan por dicho punto. El armónico ki-esimo, al ser menor que los armónicoskhi y khs, de�ne una recta de resonancia con pendiente negativa, mientras queel armónico ks-esimo genera una recta de resonancia con pendiente positiva,al estar su valor comprendido entre los armónicos khi y khs. Los armónicosks-esimo y ki-esimo de�nen las resonancias del sistema y, por tanto, coincidencon los máximos que presenta la impedancia al ser representada respecto a lafrecuencia, tal y como se puede ver en la Figura 4.10.(b).
(a)
2 4 6 8 10 12 140
2
4
6
8
10
12
Orden de armónico
Impe
danc
ia d
esde
car
ga
k i
k s
(b)
Figura 4.10: Punto de diseño y resonancias.(a) Punto de diseño en el plano Cs�Ci.
(b) Impedancia equivalente desde la carga.
De este modo, si se quiere tener un control sobre la posición de los máximosde la impedancia frente a la frecuencia, y así diseñar el �ltro con inmunidadfrente a variación de los parámetros, se pueden añadir restricciones adicionales,que, para el caso bidimensional, son de la forma:
kilim!
1� (kilim=khs)2Cs +
kilim!
1� (kilim=khi)2Ci +Blki +Bski > 0 (4.101)
75
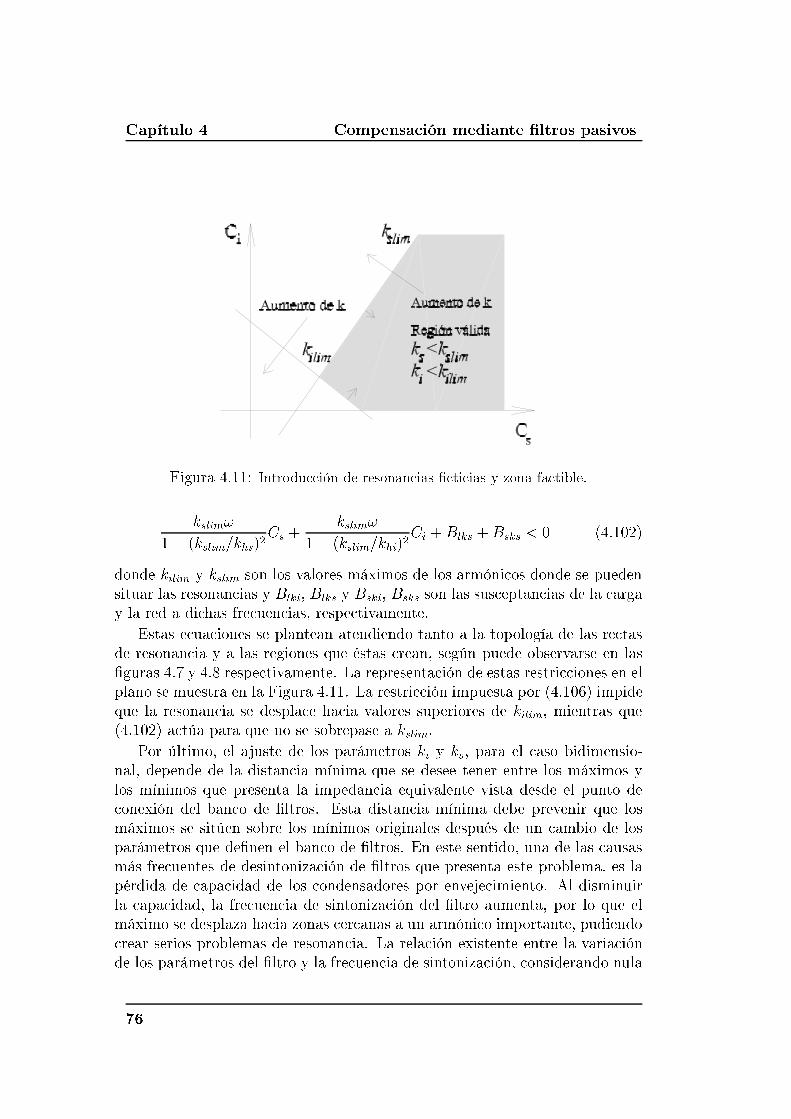
Capítulo 4 Compensación mediante �ltros pasivos
Figura 4.11: Introducción de resonancias �cticias y zona factible.
kslim!
1� (kslim=khs)2Cs +
kslim!
1� (kslim=khi)2Ci +Blks +Bsks < 0 (4.102)
donde kilim y kslim son los valores máximos de los armónicos donde se puedensituar las resonancias y Blki, Blks y Bski, Bsks son las susceptancias de la cargay la red a dichas frecuencias, respectivamente.
Estas ecuaciones se plantean atendiendo tanto a la topología de las rectasde resonancia y a las regiones que éstas crean, según puede observarse en las�guras 4.7 y 4.8 respectivamente. La representación de estas restricciones en elplano se muestra en la Figura 4.11. La restricción impuesta por (4.106) impideque la resonancia se desplace hacia valores superiores de kilim, mientras que(4.102) actúa para que no se sobrepase a kslim.
Por último, el ajuste de los parámetros ki y ks, para el caso bidimensio-nal, depende de la distancia mínima que se desee tener entre los máximos ylos mínimos que presenta la impedancia equivalente vista desde el punto deconexión del banco de �ltros. Esta distancia mínima debe prevenir que losmáximos se sitúen sobre los mínimos originales después de un cambio de losparámetros que de�nen el banco de �ltros. En este sentido, una de las causasmás frecuentes de desintonización de �ltros que presenta este problema, es lapérdida de capacidad de los condensadores por envejecimiento. Al disminuirla capacidad, la frecuencia de sintonización del �ltro aumenta, por lo que elmáximo se desplaza hacia zonas cercanas a un armónico importante, pudiendocrear serios problemas de resonancia. La relación existente entre la variaciónde los parámetros del �ltro y la frecuencia de sintonización, considerando nula
76

Compensación mediante �ltros pasivos
la variación de la reactancia del �ltro, se puede calcular por la expresión:
khkh0
=1p�
(4.103)
siendo kh la nueva frecuencia de sintonización, kh0 la frecuencia de sintonizaciónoriginal y � la variación del condensador expresada en por unidad. De estaforma disminuciones de la capacidad del condensador del 15% tendrían comoresultado un desplazamiento relativo de la frecuencia de 1.085. Así, el �ltrosintonizado al 5o armónico se desplazaría al 5.42, el 7o armónico al 7.59 y el11er armónico 11.93.
4.3.3.2 Restricción de potencia reactiva en el armónico fundamen-tal
La minimización de potencia reactiva planteada por (4.81)-(4.86) no garantizaque el conjunto formado por la carga y el compensador pasivo actúen como unacarga no capacitiva para el armónico fundamental. De la misma manera que seha realizado en la sección anterior, esta restricción sobre la potencia reactivapara el armónico fundamental puede expresarse de forma simple. Mediante ladescomposición ortogonal de la intensidad (4.7), el valor e�caz del armónicofundamental de la intensidad reactiva respecto a la tensión existente en lacarga es:
Ir1 = (Bl1 +Bc1)U1 � Ig1r (4.104)
donde Bl1 es la susceptancia de la parte lineal de la carga, Bc1 es la suscep-tancia del compensador pasivo utilizado, U1 es el valor e�caz del armónicofundamental de la tensión e Ig1r es la intensidad reactiva en el fundamental dela carga no lineal. Si se desea que la compensación en el fundamental no seacapacitiva, la restricción que hay que imponer es:
Ir1 < 0 =) (Bl1 +Bc1)U1 � Ig1r < 0 (4.105)
Volviendo al caso de compensación mediante un banco de dos �ltros sintoni-zados, y tal como se ve en la Figura 4.12, (4.105) es una recta sobre el planode�nido por los condensadores de los �ltros Cs y Ci, pudiendo ser expresadaesta restricción de la siguiente forma:
!
1� (1=khs)2Cs +
!
1� (1=khi)2Ci +Blk � Ig1r
U1< 0 (4.106)
77

Capítulo 4 Compensación mediante �ltros pasivos
Figura 4.12: Restricción de potencia reactiva en el armónico fundamental.
4.4 Diseño del algoritmo de punto interior
En esta sección se indicarán todos los detalles que han sido considerados paraaplicar el algoritmo primal-dual de barrera logarítmica al problema de mini-mización de reactiva en regímenes no senoidales. El proceso a seguir paraminimizar la intensidad reactiva se puede resumir en los siguientes puntos:
� Búsqueda de las regiones factibles. Una vez conocidas las frecuenciasde sintonización del banco de �ltros que se va a instalar, los armónicosde tensión e intensidad y las distintas impedancias presentes en el pro-blema, es posible determinar los hiperplanos de resonancia. A partir delos mismos, tal como se explicó en la Sección 4.3.2.3, se determinan laszonas factibles. En cada una de estas zonas se buscará un mínimo lo-cal, resolviendo el problema de optimización planteado en las ecuaciones(4.97), con las consideraciones de ejecución que aquí se exponen.
� Solución inicial. El proceso de optimización necesita unos valores inicia-les para las variables implicadas en el mismo. Por tanto, se necesitaninicializar las siguientes variables:
� Capacidades de los condensadores de cada uno de los �ltros. Atodos los condensadores se le asigna como valor inicial 10�4s=rad:.Este ajuste es heurístico, siendo el que mejores características deconvergencia presenta para todos los casos que han sido estudiados.Es evidente que, iniciando las capacidades de los condensadores de
78
Compensación mediante �ltros pasivos
este modo, no es posible asegurar que el punto inicial esté dentro dela región factible que se está analizando. Sin embargo, esto no es ne-cesario, ya que que las únicas condiciones que se tienen que cumplirpara aplicar el algoritmo primal-dual de barrera logarítmica son lasde positividad de algunas de sus variables, en este caso capacida-des, factor de penalización, holguras y variables duales. Conformeel número de iteraciones del algoritmo vaya aumentando, se estarámás cerca de cumplir las condiciones de optimalidad planteadas enlas ecuaciones (4.88)-(4.96) y, por tanto, la solución se encaminaráal interior de la región especi�cada.
� Factor de penalización �. Se inicializa con un valor positivo lo su�-cientemente grande para que el término de penalización logarítmicosea el predominante en la función objetivo durante las primerasiteraciones. De esta forma se consigue que, al inicio del procesoiterativo, la solución se aleje de las barreras y se desplace hacia elinterior de la zona factible bajo estudio. El factor de penalizacióndisminuye con el número de iteraciones, de forma que, cuando essu�cientemente pequeño, la solución tiende al mínimo de la zonaque se estudia. En este caso, el factor de penalización se igualainicialmente a 100.
� Variables de holgura primales. Las holguras primales, ss y si delproblema deben ser todas positivas e inicialmente toman el valor10�3. A partir de estos valores se calcula el valor inicial de lasvariables auxiliares, xs y xi, mediante las ecuaciones (4.93) y (4.94).
� Variables de holgura duales. Las holguras duales son las que seintroducen en el problema original cuando se plantea la funciónlagrangiana. En este caso dichas holguras son �, �, �̂ y �̂. Dichasvariables se inicializan a partir de los valores de las holguras primalesy el factor de penalización, teniendo en cuenta las ecuaciones (4.89)-(4.90) y (4.95)-(4.96).
� Determinación del tamaño del paso de avance. La resolución de las condi-ciones de optimalidad mediante la aplicación de una iteración del métodode Newton, sistema de ecuaciones (4.97), determina la dirección del gra-diente, a partir de la cual todas las variables deben ser actualizadas. Sinembargo, se tiene que tener en cuenta que las variables primales, ss, si,xs, xi, y duales, �, �, �̂, �̂ deben permanecer estrictamente positivasdurante todo el proceso iterativo. Por estos motivos, se debe determinar
79

Capítulo 4 Compensación mediante �ltros pasivos
Figura 4.13: Cálculo del factor de avance.
el paso máximo de avance en la dirección del gradiente calculado pre-viamente para que ninguna de las variables antes mencionadas se haganegativa, tal y como se muestra en la Figura 4.13. Dicho factor de avancepara la iteración k + 1, �(k+1), se calcula mediante la expresión:
�(k+1) = min
1;�v
(k+1)i
v(k)i
!8i (4.107)
donde v es un vector que contiene todas las variables de holgura primalesy duales enumeradas anteriormente.
Una vez se ha calculado el valor del factor de avance, todas las variablesdel problema se actualizan de acuerdo con la siguiente expresión:
y(k+1) = y(k) + �(k)�y(k) (4.108)
� Ajuste del factor de penalización. Conforme el número de iteracionesaumenta, el factor de penalización � debe disminuir para que al �nal delproceso iterativo la in�uencia del término de penalización dentro de lafunción objetivo modi�cada sea despreciable. Dentro de las diferentesformas de actualizar este factor en cada iteración, se ha elegido que seaproporcional al error medio de dualidad, que se de�ne de la siguientemanera:
E(k)d =
Pmi=1 s
(k)i �̂
(k)i
m(4.109)
De esta forma, el factor de penalización se actualiza para cada iteración:
�(k) = E(k)d =
Pmi=1 s
(k)i �̂
(k)i
m(4.110)
donde 0 < < 1 tomándose en esta aplicación = 0:1.
80
Compensación mediante �ltros pasivos
� Criterio de parada. El proceso iterativo debe terminar cuando se pro-duzca alguna de las siguientes situaciones:
� Error de dualidad pequeño. Si el error de dualidad cumple estacondición signi�ca que el parámetro �, calculado mediante (4.110),es pequeño [40]. Esto implica que la in�uencia que la barrera loga-rítmica tiene sobre la función objetivo original es despreciable. Elerror de dualidad puede decrecer porque, o bien las holguras, o lasvariables duales, son pequeñas. En el primer caso, el mínimo de lafunción modi�cada que cumple las condiciones de optimalidad estásituado extremadamente cerca de una restricción activa. Normal-mente, se puede comprobar al analizar la función original que dichomínimo tiene un gradiente distinto de cero. El proceso iterativo eneste caso �naliza, aun cuando el gradiente es no nulo, debido a quese alcanza una restricción. En el segundo caso, si las variables dua-les son pequeñas signi�ca que se está lejos de las restricciones, éstasno están activas, lo cual indica que la solución está en el interior dela región estudiada y dentro de ella se ha encontrado el mínimo.
� Norma del gradiente su�cientemente pequeña. Esto signi�ca que secumplen las condiciones de optimalidad y que se ha alcanzado unmínimo local en la región estudiada.
4.5 Resumen del capítulo
En este capítulo se ha desarrollado el método de diseño de �ltros pasivospropuesto en la presente tesis. El objetivo que se ha perseguido es el esta-blecimiento de un reparto, de forma razonada, de la potencia reactiva entrelos distintos �ltros que componen un banco. En este sentido, el criterio se-leccionado a tal efecto ha sido la minimización de la potencia reactiva o de lacomponente reactiva de la intensidad respecto a la tensión de la carga.
Dado que el objeto de la tesis son lo sistemas eléctricos de potencia in-dustriales, la teoría de potencia reactiva seleccionada es la desarrollada porFerrero y Superti-Furga, justi�cada en la Sección 3.2.2.1.4 del Capítulo 3 ySección 4.2.1 del presente capítulo. Obtenida la función que se desea mini-mizar, se establecen las ecuaciones para los casos de impedancia in�nita y�nita, siendo este último el núcleo central de la tesis. El problema de consi-derar la impedancia del sistema, como se ha podido comprobar, es doble: nolinealidad de la función a minimizar y aparición de resonancias del sistema.Ambos inconvenientes están estrechamente ligados, pues las resonancias son
81

Capítulo 4 Compensación mediante �ltros pasivos
precisamente las causantes de la no linealidad de la función. De hecho, de-bido al carácter no lineal, existen múltiples mínimos locales cada uno de loscuales está en una región que está delimitada por resonancias. Estas resonan-cias siempre y cuando las frecuencias de sintonización de los �ltros sean �jas,son unas restricciones lineales en las capacidades de los condensadores de los�ltros instalados. Con estas consideraciones, el mínimo debe ser buscado enuna determinada región del espacio delimitada por estas resonancias, siendoindispensable que la búsqueda de la solución se circunscriba a la región bajoestudio. Por estos motivos, se selecciona para minimizar la función objetivo elmétodo de punto interior primal-dual de barrera logarítmica.
La descripción que se realiza del algoritmo es completa, pues se analizan latopología de las rectas de resonancia, las regiones factibles existentes a partirde éstas, así como la formulación matemática del algoritmo.
Por último, se establecen una serie de restricciones adicionales, además delas impuestas por las resonancias, para resolver algunos de los problemas deíndole práctica que se presentan en el diseño de �ltros pasivos. Estas restriccio-nes por una parte controlan los nuevos puntos de resonancia que se introducenen la red por la adición del banco de �ltros, y por otra impiden que el conjuntoformado por los �ltros y la carga tenga un carácter capacitivo en el armónicofundamental.
Una vez planteado el problema de forma matemática es conveniente apli-carlo a un sistema concreto, para poder establecer así el comportamiento de losdistintos parámetros que intervienen en la optimización, lo cual se desarrollaen el siguiente capítulo.
82
Capítulo 5
Ejemplos de aplicación
5.1 Introducción
En el presente capítulo se hará una aplicación numérica a casos concretosdel algoritmo de punto interior analizado anteriormente. El objetivo que sepersigue es doble:
� Por una parte se pretende caracterizar el funcionamiento de la compen-sación de potencia reactiva mediante los distintos tipos de elementospasivos estudiados: condensadores y �ltros pasivos. Para ello, ademásde analizar la evolución de los armónicos característicos presentes en lainstalación, se tendrán en cuenta tres parámetros que caracterizan deforma global la compensación realizada:
� Dimensionado de los elementos pasivos a instalar. En el caso de�ltros sintonizados se especi�cará el valor de la capacidad de loscondensadores de cada �ltro. El valor de la inductancia de la bobinaasociada a estos queda determinada a partir de la frecuencia desintonización de cada uno de los �ltros.
� Valor e�caz de la intensidad de la fuente. El objetivo de la instala-ción de compensadores pasivos es la minimización de las componen-tes reactivas de la intensidad respecto a la tensión de alimentaciónen la carga, lo cual conlleva la reducción de la potencia reactivademandada. Se compararán los valores obtenidos antes y despuésde la compensación para así comprobar si la reducción obtenida essustancial. Concretamente, se expresará el cociente entre el valore�caz de la intensidad después de la compensación y el existenteinicialmente.
83
Capítulo 5 Ejemplos de aplicación
� Distorsión armónica de tensión e intensidad. La distorsión armó-nica de una señal es una medida global del contenido armónico dela misma, y se de�ne como el cociente entre el valor e�caz de lascomponentes armónicas respecto a la fundamental:
THDx =
pPk>1X
2k
X1(5.1)
La utilización de condensadores para la compensación de reactivacuando existen tensiones e intensidades no senoidales tiene como in-conveniente el aumento de los armónicos de tensión y de intensidad.Con la utilización de �ltros pasivos puede conseguirse, además dela compensación requerida, una disminución del contenido armónicode tensiones e intensidades del sistema, con el consiguiente aumentode la calidad de suministro.
En los casos prácticos presentados se tendrán en cuenta las variacionesde los parámetros más relevantes que intervienen en el proceso de opti-mización de los compensadores pasivos, y estudiar así cómo afectan a lacompensación realizada [87]. En particular, se analizará la variación delos parámetros globales enunciados frente a la distorsión de la tensióndel sistema, la distorsión generada por la carga no lineal, el factor depotencia de la carga, la impedancia de alimentación y la frecuencia desintonización de los �ltros.
� Por otra parte, se estudiarán aspectos numéricos del proceso de optimi-zación. El método utilizado para minimizar consiste en la modi�caciónde la función objetivo mediante unas barreras logarítmicas ajustadas enlos límites de la región bajo estudio. Conforme el proceso iterativo avan-za, el peso relativo que estas penalizaciones tienen en la función objetivo(parámetro �) se va reduciendo en función del error medio de duali-dad. Concretamente se analizará cómo varían el factor de penalización,el error medio de dualidad y la función objetivo respecto al número deiteraciones. Este análisis se efectuará en el caso de compensación con unbanco de dos �ltros sintonizados, debido a que, además de poder estudiarlos parámetros ya mencionados, permite realizar una representación delvalor e�caz de la intensidad frente a los valores de la capacidad de ambos�ltros. Esto permite comprobar como varía esta función durante el pro-ceso iterativo debido a la modi�cación de las funciones de penalización.
84
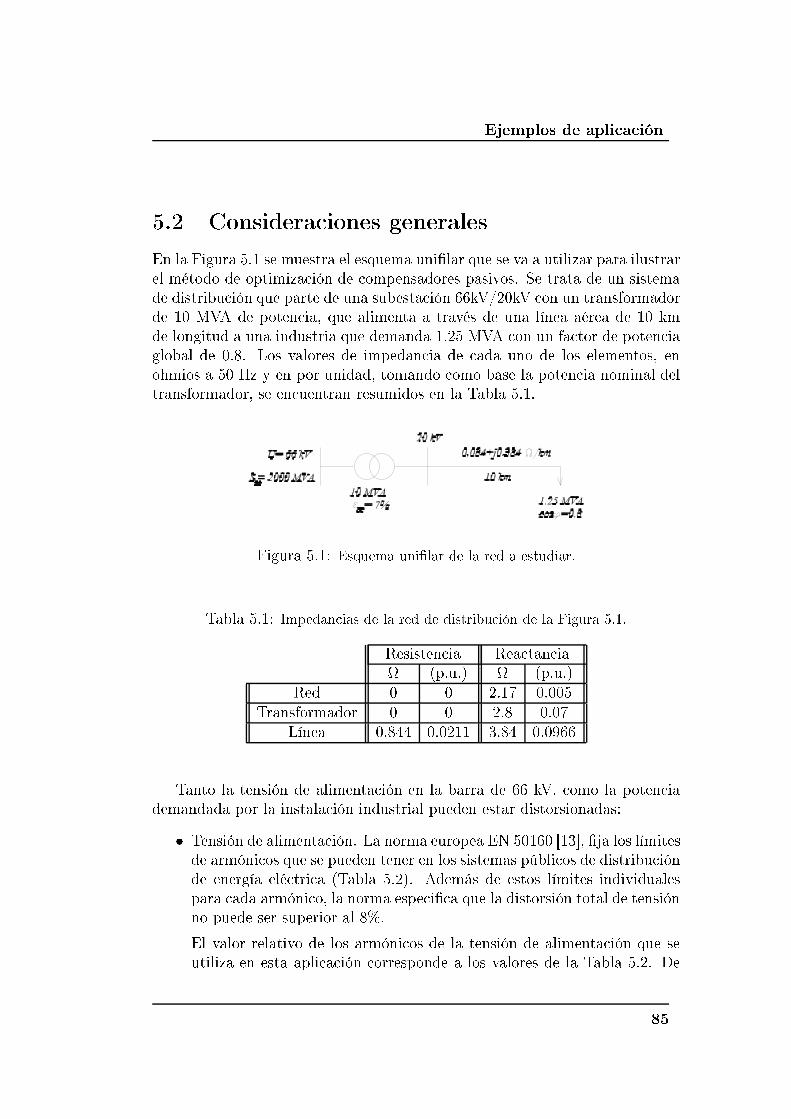
Ejemplos de aplicación
5.2 Consideraciones generales
En la Figura 5.1 se muestra el esquema uni�lar que se va a utilizar para ilustrarel método de optimización de compensadores pasivos. Se trata de un sistemade distribución que parte de una subestación 66kV/20kV con un transformadorde 10 MVA de potencia, que alimenta a través de una línea aérea de 10 kmde longitud a una industria que demanda 1.25 MVA con un factor de potenciaglobal de 0.8. Los valores de impedancia de cada uno de los elementos, enohmios a 50 Hz y en por unidad, tomando como base la potencia nominal deltransformador, se encuentran resumidos en la Tabla 5.1.
Figura 5.1: Esquema uni�lar de la red a estudiar.
Tabla 5.1: Impedancias de la red de distribución de la Figura 5.1.
Resistencia Reactancia (p.u.) (p.u.)
Red 0 0 2.17 0.005Transformador 0 0 2.8 0.07
Línea 0.844 0.0211 3.84 0.0966
Tanto la tensión de alimentación en la barra de 66 kV, como la potenciademandada por la instalación industrial pueden estar distorsionadas:
� Tensión de alimentación. La norma europea EN 50160 [13], �ja los límitesde armónicos que se pueden tener en los sistemas públicos de distribuciónde energía eléctrica (Tabla 5.2). Además de estos límites individualespara cada armónico, la norma especi�ca que la distorsión total de tensiónno puede ser superior al 8%.
El valor relativo de los armónicos de la tensión de alimentación que seutiliza en esta aplicación corresponde a los valores de la Tabla 5.2. De
85

Capítulo 5 Ejemplos de aplicación
Tabla 5.2: Niveles máximos de armónicos permitidos en redes de distribución pú-
blicas según EN50160.
Orden Tensión Orden Tensión Orden Tensiónarmónico (%) armónico (%) armónico (%)
2 2 3 5 4 15 6 6 0.5 7 58 0.5 9 1.5 10 0.511 3.5 12 0.5 13 314 0.5 15 0.5 16 0.517 2 18 0.5 19 1.520 0.5 21 0.5 22 0.523 1.5 24 0.5 25 1.5
este modo, dada una tasa de distorsión global, los armónicos de tensióntoman el valor de la tabla multiplicados por el factor:
�u =THDupP
k>1 U2k
(5.2)
� Intensidad de la carga. La intensidad demandada por la instalación in-dustrial tendrá una componente fundamental más unos armónicos. Elpatrón de armónicos que se elige es el de un recti�cador controlado de seispulsos que se muestra en la Tabla 5.3 [85]. Es importante recalcar que,tal y como puede comprobarse, existen armónicos múltiplos de tres en laintensidad demandada por dicho recti�cador. Sin embargo, estas inten-sidades no son de secuencia homopolar, pues el recti�cador se alimentadesde la red mediante un transformador con el neutro aislado. Dichosarmónicos pueden ser tan solo de secuencia directa o inversa, debido aasimetrías del circuito o defectuosa generación de los instantes de dis-paro. En lo que sigue, estos armónicos serán considerados de secuenciadirecta o inversa aleatoriamente.
Para la realización de los ejemplos, se mantiene la intensidad e�caz de-manda constante, por lo que la variación del contenido armónico de laintensidad se realiza a través de la variación de la distorsión de intensi-dad. Si la distorsión de intensidad de los armónicos de la Tabla 5.3 esTHDir, y se desea tener una distorsión de intensidad THDi, los armóni-
86

Ejemplos de aplicación
Tabla 5.3: Contenido armónico de la intensidad no lineal.
Orden Inten. Orden Inten. Orden Inten.armónico (%) armónico (%) armónico (%)
2 0.4 8 0.7 17 4.53 1.6 9 1.4 19 2.84 0.5 10 0.3 23 2.85 21 11 8 25 1.76 0.6 12 0.8 29 1.97 11 13 4.8 31 1
cos se calculan mediante la multiplicación de los armónicos de la Tabla5.3 por el coe�ciente:
�i =THDi
THDir(5.3)
Posteriormente se ajusta la impedancia de la carga para que el valor dela componente fundamental sea tal que la intensidad e�caz demandadasea constante.
Para comparar las distintos métodos de compensación, mediante conden-sador o �ltros pasivos, se mostrarán para cada caso analizado los valores delcondensador óptimo, valor e�caz de la intensidad y distorsiones de tensión eintensidad después de la compensación. A continuación, se indican los detallesmás relevantes de la forma en la que se expresan cada uno de los resultadosmencionados:
� Condensador óptimo. Al estar trabajando con los parámetros la red de laFigura 5.1 expresados en por unidad, el condensador, si se toman comobase las expresiones desarrolladas en el Capítulo 4, tiene unidades deF, o lo que es lo mismo, de s=rad:
Zc[p:u:] =1
![rad=s]C=) C
h s
rad
i� [F] (5.4)
� Valor e�caz de la intensidad después de la compensación. La intensidadse re�ere siempre al valor que ésta tiene antes de realizar la compensación.
� Distorsiones de intensidad y tensión. Al igual que el valor e�caz deintensidad, las tasas de distorsión se presentan referidas a sus valoresprevios a la compensación.
87
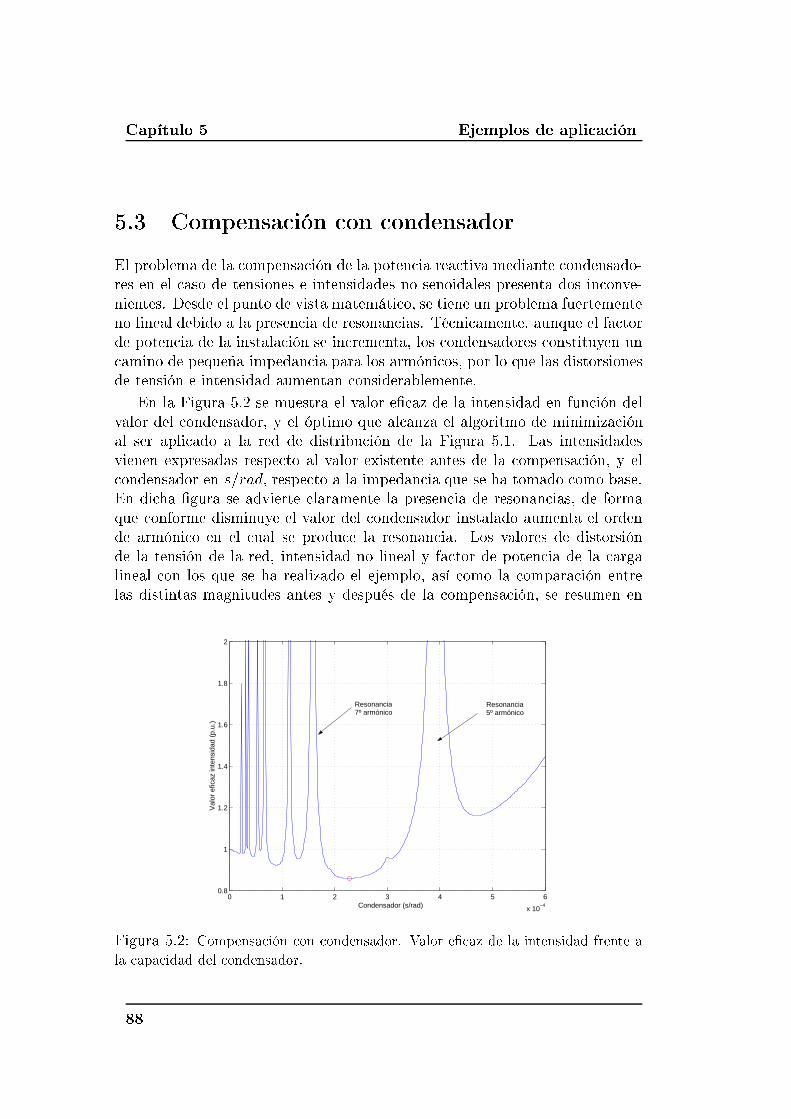
Capítulo 5 Ejemplos de aplicación
5.3 Compensación con condensador
El problema de la compensación de la potencia reactiva mediante condensado-res en el caso de tensiones e intensidades no senoidales presenta dos inconve-nientes. Desde el punto de vista matemático, se tiene un problema fuertementeno lineal debido a la presencia de resonancias. Técnicamente, aunque el factorde potencia de la instalación se incrementa, los condensadores constituyen uncamino de pequeña impedancia para los armónicos, por lo que las distorsionesde tensión e intensidad aumentan considerablemente.
En la Figura 5.2 se muestra el valor e�caz de la intensidad en función delvalor del condensador, y el óptimo que alcanza el algoritmo de minimizaciónal ser aplicado a la red de distribución de la Figura 5.1. Las intensidadesvienen expresadas respecto al valor existente antes de la compensación, y elcondensador en s=rad, respecto a la impedancia que se ha tomado como base.En dicha �gura se advierte claramente la presencia de resonancias, de formaque conforme disminuye el valor del condensador instalado aumenta el ordende armónico en el cual se produce la resonancia. Los valores de distorsiónde la tensión de la red, intensidad no lineal y factor de potencia de la cargalineal con los que se ha realizado el ejemplo, así como la comparación entrelas distintas magnitudes antes y después de la compensación, se resumen en
0 1 2 3 4 5 6
x 10−4
0.8
1
1.2
1.4
1.6
1.8
2
Val
or e
ficaz
inte
nsid
ad (
p.u.
)
Condensador (s/rad)
Resonancia 5º armónico
Resonancia 7º armónico
Figura 5.2: Compensación con condensador. Valor e�caz de la intensidad frente a
la capacidad del condensador.
88
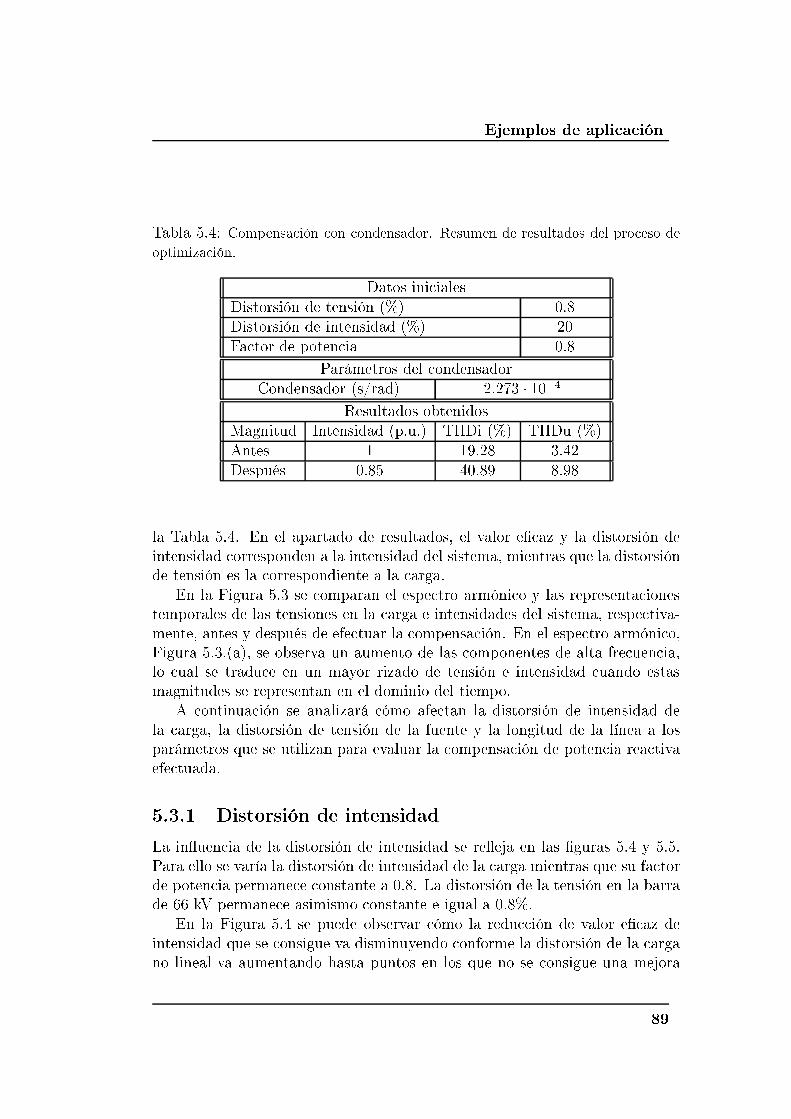
Ejemplos de aplicación
Tabla 5.4: Compensación con condensador. Resumen de resultados del proceso de
optimización.
Datos inicialesDistorsión de tensión (%) 0.8Distorsión de intensidad (%) 20Factor de potencia 0.8
Parámetros del condensadorCondensador (s/rad) 2:273 � 10�4
Resultados obtenidosMagnitud Intensidad (p.u.) THDi (%) THDu (%)Antes 1 19.28 3.42Después 0.85 40.89 8.98
la Tabla 5.4. En el apartado de resultados, el valor e�caz y la distorsión deintensidad corresponden a la intensidad del sistema, mientras que la distorsiónde tensión es la correspondiente a la carga.
En la Figura 5.3 se comparan el espectro armónico y las representacionestemporales de las tensiones en la carga e intensidades del sistema, respectiva-mente, antes y después de efectuar la compensación. En el espectro armónico,Figura 5.3.(a), se observa un aumento de las componentes de alta frecuencia,lo cual se traduce en un mayor rizado de tensión e intensidad cuando estasmagnitudes se representan en el dominio del tiempo.
A continuación se analizará cómo afectan la distorsión de intensidad dela carga, la distorsión de tensión de la fuente y la longitud de la línea a losparámetros que se utilizan para evaluar la compensación de potencia reactivaefectuada.
5.3.1 Distorsión de intensidad
La in�uencia de la distorsión de intensidad se re�eja en las �guras 5.4 y 5.5.Para ello se varía la distorsión de intensidad de la carga mientras que su factorde potencia permanece constante a 0.8. La distorsión de la tensión en la barrade 66 kV permanece asimismo constante e igual a 0:8%.
En la Figura 5.4 se puede observar cómo la reducción de valor e�caz deintensidad que se consigue va disminuyendo conforme la distorsión de la cargano lineal va aumentando hasta puntos en los que no se consigue una mejora
89
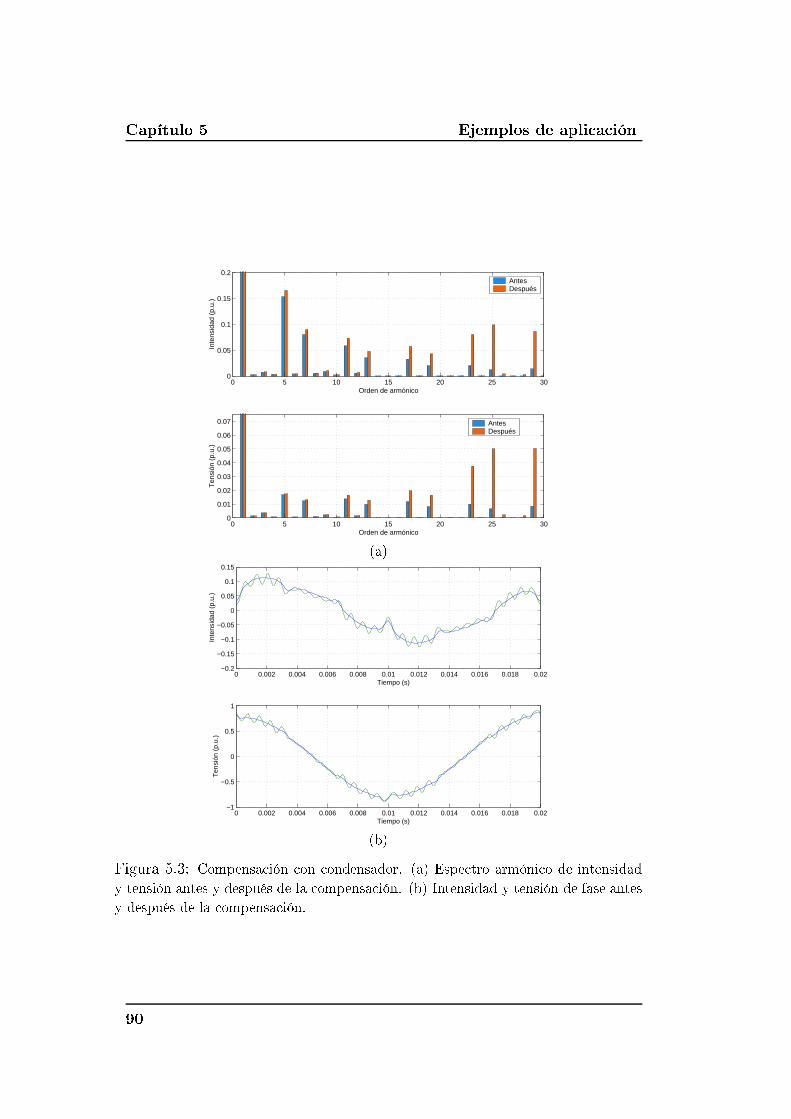
Capítulo 5 Ejemplos de aplicación
0 5 10 15 20 25 300
0.05
0.1
0.15
0.2
Inte
nsid
ad (
p.u.
)
Orden de armónico
Antes Después
0 5 10 15 20 25 300
0.01
0.02
0.03
0.04
0.05
0.06
0.07
Ten
sión
(p.
u.)
Orden de armónico
Antes Después
(a)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
Tiempo (s)
Inte
nsid
ad (
p.u.
)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02−1
−0.5
0
0.5
1
Tiempo (s)
Ten
sión
(p.
u.)
(b)
Figura 5.3: Compensación con condensador. (a) Espectro armónico de intensidad
y tensión antes y después de la compensación. (b) Intensidad y tensión de fase antes
y después de la compensación.
90
Ejemplos de aplicación
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.5
1
1.5
2
2.5x 10
−4
THDi carga (p.u.)
Con
dens
ador
ópt
imo
(s/r
ad)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50.8
0.85
0.9
0.95
1
THDi carga (p.u.)
Nor
ma
(p.u
.)
Figura 5.4: Compensación con condensador. Capacidad del condensador óptimo y
valor e�caz de la intensidad relativo al inicial, respecto a la distorsión de carga.
sustancial. Además, puede comprobarse que el valor de la capacidad del con-densador sufre una variación brusca a partir de una distorsión de intensidadde la carga igual a 40%. Con distorsiones menores a este valor, el mínimoabsoluto se encuentra en una misma región. Al ir aumentando el valor de ladistorsión de intensidad de la carga, la curva de valor absoluto de intensidadrespecto a la capacidad del condensador se desplaza verticalmente, lo cual sepuede apreciar en la Figura 5.4, ya que los valores e�caces de intensidad des-pués de la compensación crecen con la distorsión. De esta forma, a partir de un40% de distorsión de intensidad de la carga, si bien dentro de la zona analizadasigue existiendo un mínimo local, dicho mínimo no es el absoluto, que en estecaso se encuentra en una zona con valores de condensadores menores, o lo quees lo mismo, en una región de�nida por condensadores que crean resonanciaspara armónicos de mayor orden a los anteriores.
En la Figura 5.5 se representan las distorsiones de tensión e intensidad. Encada �gura se representan dos curvas: valores absolutos de distorsión antesde compensar, en porcentaje, y valores relativos frente a esta última despuésde la compensación. Los primeros aumentan con la distorsión de la carga,mientras que los segundos permanecen prácticamente constantes con algunasexcepciones. Tal es el caso del primer punto de la curva de distorsión relativa de
91

Capítulo 5 Ejemplos de aplicación
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
2
4
6
8
10
THDi carga (p.u.)
TH
Di
Distorsión inicial Distorsión final relativa
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
1
2
3
4
THDi carga (p.u.)
TH
Du
Distorsión inicial Distorsión final relativa
Figura 5.5: Compensación con condensador. Distorsión de tensión e intensidad
antes de la compensación y relativas después de la misma.
intensidad, bastante mayor que los demás. Esto se debe a que para dicho puntoson predominantes los armónicos generados por la tensión de la fuente respectoa los producidos por la carga no lineal, por lo que al instalar el condensadorse produce un aumento de los armónicos introducidos por la fuente circulandopor la línea. La disminución de la distorsión relativa al �nal de la curva sedebe al pequeño valor de la capacidad del condensador instalado.
5.3.2 Distorsión de tensión
Al igual que ocurre en el caso de la distorsión de intensidad, un aumento de ladistorsión de tensión provoca un �ltrado menos efectivo. Por una parte, las re-ducciones de potencia reactiva no son factibles en algunos casos, debido a quela compensación conseguida para el armónico fundamental y armónicos de or-den inferior son empeoradas por la circulación de armónicos de orden superiorhacia el condensador. Esto, por otra parte, supone un deterioro importantetanto de las distorsiones de intensidad y de la tensión en la carga. A modode resumen, e incluyendo los efectos de distorsiones en tensión del sistema eintensidad de la carga, se presenta la Figura 5.6.(a), en la que se muestra unarepresentación del valor e�caz de la intensidad después de la compensación
92
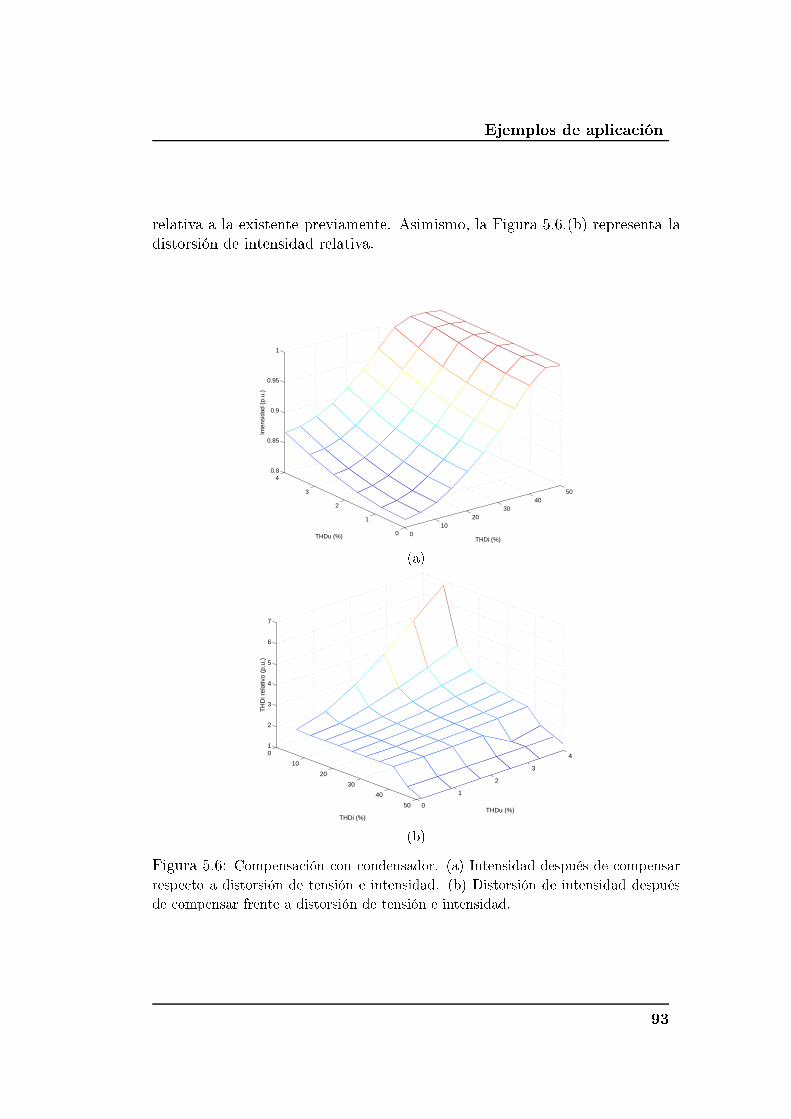
Ejemplos de aplicación
relativa a la existente previamente. Asimismo, la Figura 5.6.(b) representa ladistorsión de intensidad relativa.
010
2030
4050
0
1
2
3
40.8
0.85
0.9
0.95
1
THDi (%)THDu (%)
Inte
nsid
ad (
p.u.
)
(a)
0
10
20
30
40
50 0
1
2
3
4
1
2
3
4
5
6
7
THDu (%)THDi (%)
TH
Di r
elat
ivo
(p.u
.)
(b)
Figura 5.6: Compensación con condensador. (a) Intensidad después de compensar
respecto a distorsión de tensión e intensidad. (b) Distorsión de intensidad después
de compensar frente a distorsión de tensión e intensidad.
93
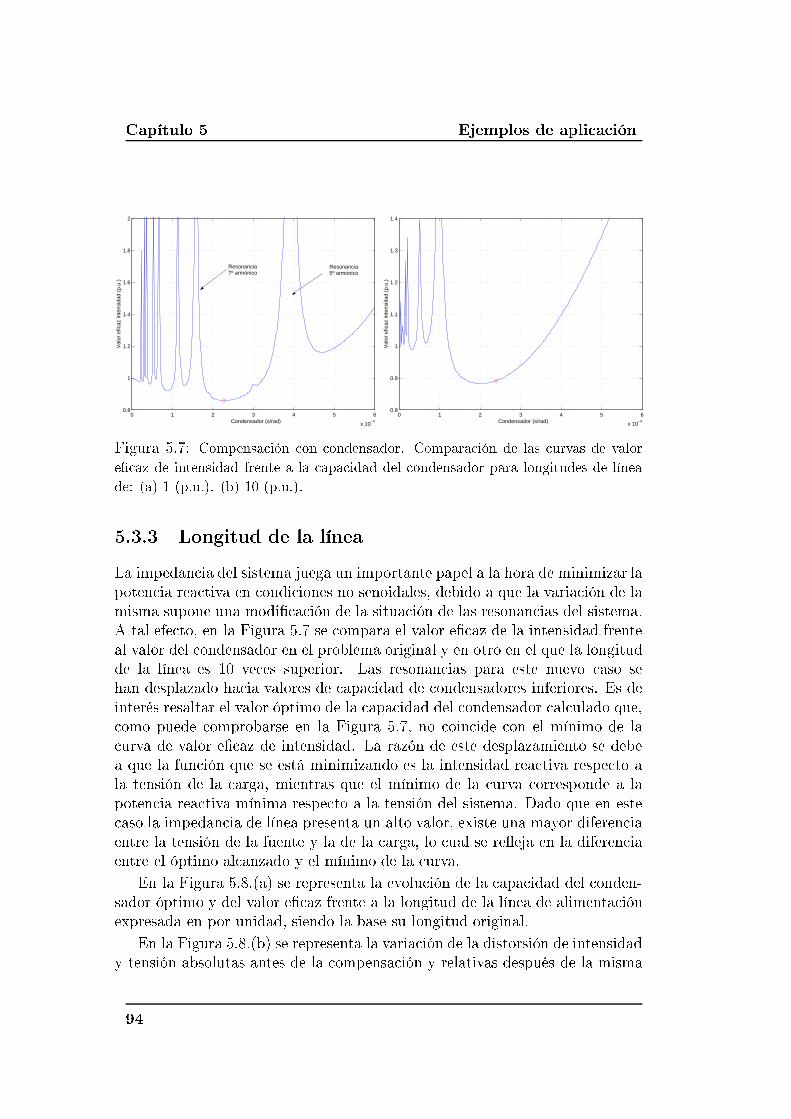
Capítulo 5 Ejemplos de aplicación
0 1 2 3 4 5 6
x 10−4
0.8
1
1.2
1.4
1.6
1.8
2
Val
or e
ficaz
inte
nsid
ad (
p.u.
)
Condensador (s/rad)
Resonancia 5º armónico
Resonancia 7º armónico
0 1 2 3 4 5 6
x 10−4
0.8
0.9
1
1.1
1.2
1.3
1.4
Val
or e
ficaz
inte
nsid
ad (
p.u.
)
Condensador (s/rad)
Figura 5.7: Compensación con condensador. Comparación de las curvas de valor
e�caz de intensidad frente a la capacidad del condensador para longitudes de línea
de: (a) 1 (p.u.). (b) 10 (p.u.).
5.3.3 Longitud de la línea
La impedancia del sistema juega un importante papel a la hora de minimizar lapotencia reactiva en condiciones no senoidales, debido a que la variación de lamisma supone una modi�cación de la situación de las resonancias del sistema.A tal efecto, en la Figura 5.7 se compara el valor e�caz de la intensidad frenteal valor del condensador en el problema original y en otro en el que la longitudde la línea es 10 veces superior. Las resonancias para este nuevo caso sehan desplazado hacia valores de capacidad de condensadores inferiores. Es deinterés resaltar el valor óptimo de la capacidad del condensador calculado que,como puede comprobarse en la Figura 5.7, no coincide con el mínimo de lacurva de valor e�caz de intensidad. La razón de este desplazamiento se debea que la función que se está minimizando es la intensidad reactiva respecto ala tensión de la carga, mientras que el mínimo de la curva corresponde a lapotencia reactiva mínima respecto a la tensión del sistema. Dado que en estecaso la impedancia de línea presenta un alto valor, existe una mayor diferenciaentre la tensión de la fuente y la de la carga, lo cual se re�eja en la diferenciaentre el óptimo alcanzado y el mínimo de la curva.
En la Figura 5.8.(a) se representa la evolución de la capacidad del conden-sador óptimo y del valor e�caz frente a la longitud de la línea de alimentaciónexpresada en por unidad, siendo la base su longitud original.
En la Figura 5.8.(b) se representa la variación de la distorsión de intensidady tensión absolutas antes de la compensación y relativas después de la misma
94
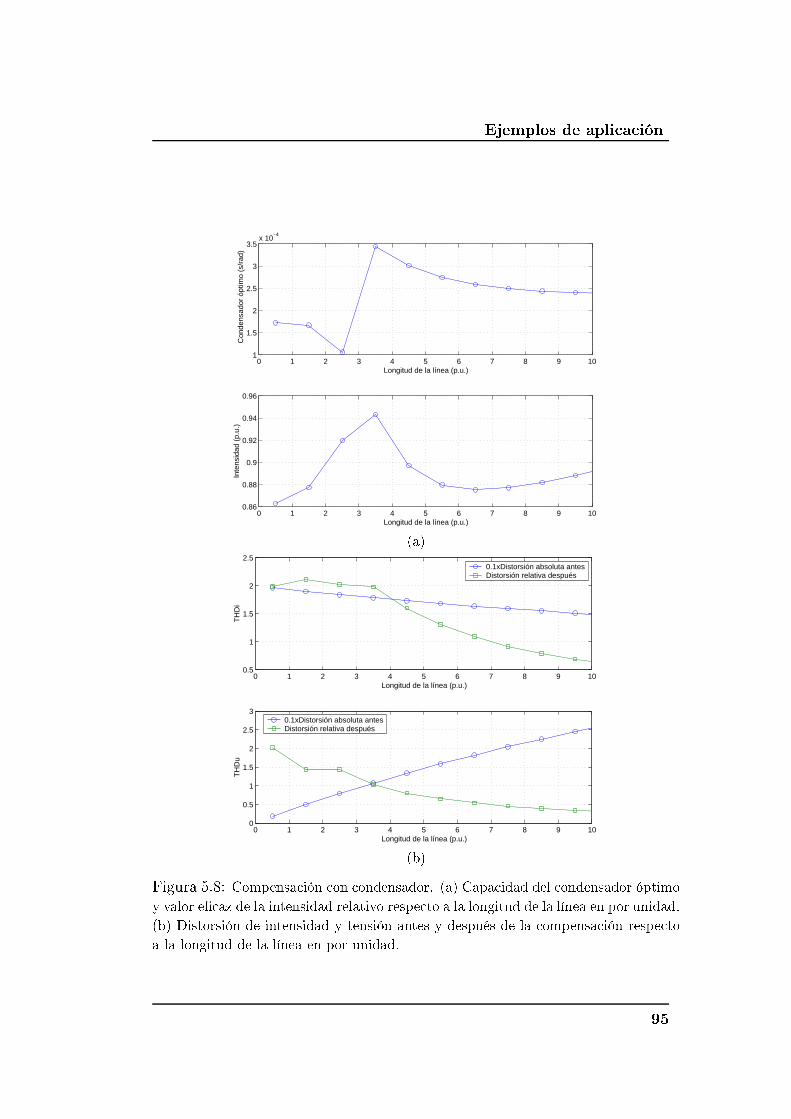
Ejemplos de aplicación
0 1 2 3 4 5 6 7 8 9 101
1.5
2
2.5
3
3.5x 10
−4
Longitud de la línea (p.u.)
Con
dens
ador
ópt
imo
(s/r
ad)
0 1 2 3 4 5 6 7 8 9 100.86
0.88
0.9
0.92
0.94
0.96
Longitud de la línea (p.u.)
Inte
nsid
ad (
p.u.
)
(a)
0 1 2 3 4 5 6 7 8 9 100.5
1
1.5
2
2.5
Longitud de la línea (p.u.)
TH
Di
0.1xDistorsión absoluta antesDistorsión relativa después
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
Longitud de la línea (p.u.)
TH
Du
0.1xDistorsión absoluta antesDistorsión relativa después
(b)
Figura 5.8: Compensación con condensador. (a) Capacidad del condensador óptimo
y valor e�caz de la intensidad relativo respecto a la longitud de la línea en por unidad.
(b) Distorsión de intensidad y tensión antes y después de la compensación respecto
a la longitud de la línea en por unidad.
95
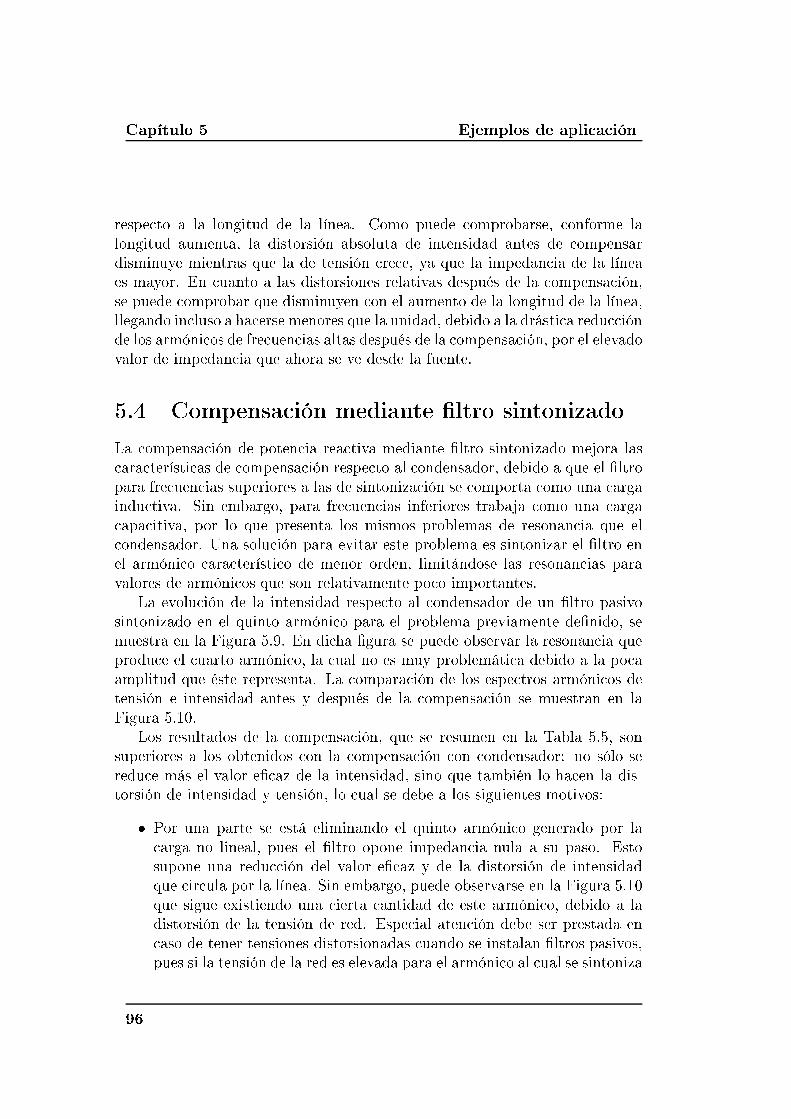
Capítulo 5 Ejemplos de aplicación
respecto a la longitud de la línea. Como puede comprobarse, conforme lalongitud aumenta, la distorsión absoluta de intensidad antes de compensardisminuye mientras que la de tensión crece, ya que la impedancia de la líneaes mayor. En cuanto a las distorsiones relativas después de la compensación,se puede comprobar que disminuyen con el aumento de la longitud de la línea,llegando incluso a hacerse menores que la unidad, debido a la drástica reducciónde los armónicos de frecuencias altas después de la compensación, por el elevadovalor de impedancia que ahora se ve desde la fuente.
5.4 Compensación mediante �ltro sintonizado
La compensación de potencia reactiva mediante �ltro sintonizado mejora lascaracterísticas de compensación respecto al condensador, debido a que el �ltropara frecuencias superiores a las de sintonización se comporta como una cargainductiva. Sin embargo, para frecuencias inferiores trabaja como una cargacapacitiva, por lo que presenta los mismos problemas de resonancia que elcondensador. Una solución para evitar este problema es sintonizar el �ltro enel armónico característico de menor orden, limitándose las resonancias paravalores de armónicos que son relativamente poco importantes.
La evolución de la intensidad respecto al condensador de un �ltro pasivosintonizado en el quinto armónico para el problema previamente de�nido, semuestra en la Figura 5.9. En dicha �gura se puede observar la resonancia queproduce el cuarto armónico, la cual no es muy problemática debido a la pocaamplitud que éste representa. La comparación de los espectros armónicos detensión e intensidad antes y después de la compensación se muestran en laFigura 5.10.
Los resultados de la compensación, que se resumen en la Tabla 5.5, sonsuperiores a los obtenidos con la compensación con condensador: no sólo sereduce más el valor e�caz de la intensidad, sino que también lo hacen la dis-torsión de intensidad y tensión, lo cual se debe a los siguientes motivos:
� Por una parte se está eliminando el quinto armónico generado por lacarga no lineal, pues el �ltro opone impedancia nula a su paso. Estosupone una reducción del valor e�caz y de la distorsión de intensidadque circula por la línea. Sin embargo, puede observarse en la Figura 5.10que sigue existiendo una cierta cantidad de este armónico, debido a ladistorsión de la tensión de red. Especial atención debe ser prestada encaso de tener tensiones distorsionadas cuando se instalan �ltros pasivos,pues si la tensión de la red es elevada para el armónico al cual se sintoniza
96
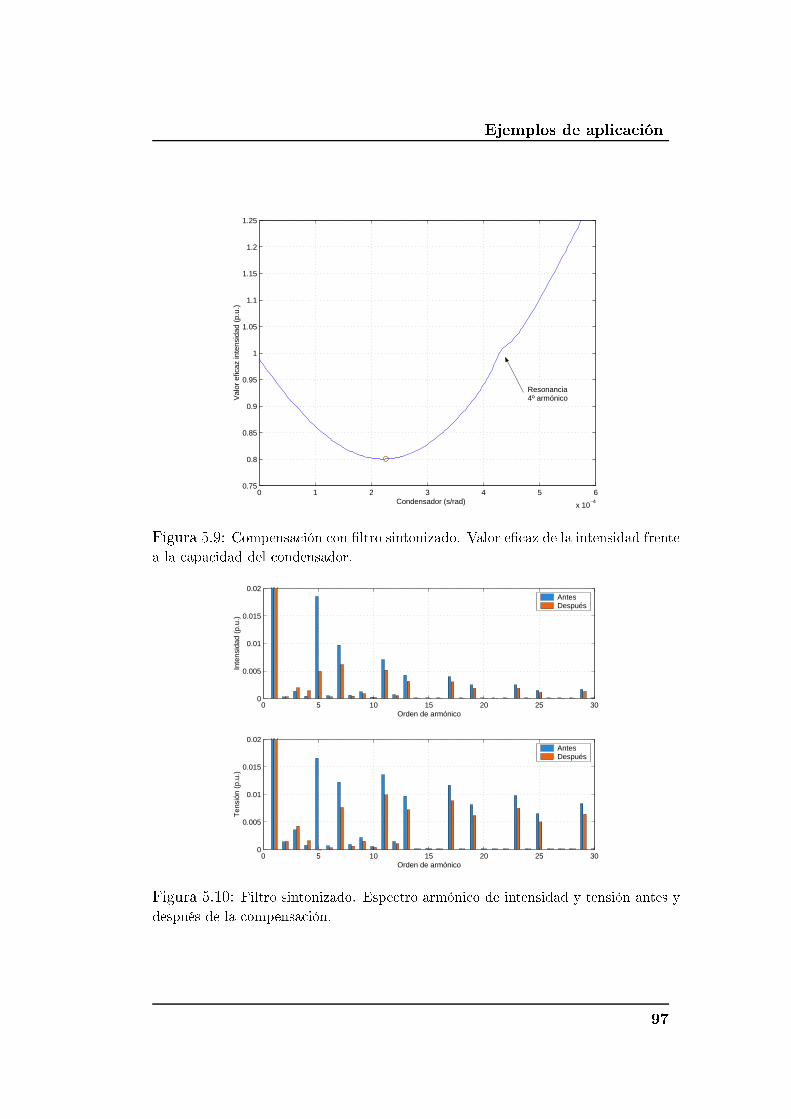
Ejemplos de aplicación
0 1 2 3 4 5 6
x 10−4
0.75
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
1.25
Condensador (s/rad)
Val
or e
ficaz
inte
nsid
ad (
p.u.
)
Resonancia4º armónico
Figura 5.9: Compensación con �ltro sintonizado. Valor e�caz de la intensidad frente
a la capacidad del condensador.
0 5 10 15 20 25 300
0.005
0.01
0.015
0.02
Orden de armónico
Inte
nsid
ad (
p.u.
)
Antes Después
0 5 10 15 20 25 300
0.005
0.01
0.015
0.02
Orden de armónico
Ten
sión
(p.
u.)
Antes Después
Figura 5.10: Filtro sintonizado. Espectro armónico de intensidad y tensión antes y
después de la compensación.
97
Capítulo 5 Ejemplos de aplicación
Tabla 5.5: Compensación con �ltro sintonizado. Resumen de resultados del proceso
de optimización.
Datos inicialesDistorsión de tensión (%) 0.8Distorsión de intensidad (%) 20Factor de potencia 0.8
Parámetros del �ltroFrecuencia de sintonización Condensador (s/rad)
5 2:255 � 10�4Resultados obtenidos
Magnitud Intensidad (p.u.) THDi (%) THDu (%)Antes 1 19.28 3.42Después 0.8 11.47 2.18
el �ltro, puede que la mejora esperada en la eliminación del armónicode la carga sea empeorada por el aumento de la intensidad armónicaproveniente de la red.
� La instalación del �ltro limita también la circulación de armónicos deintensidad de órdenes superiores a la frecuencia de sintonización desdeel sistema, lo cual disminuye el valor e�caz de intensidad y la distorsióntanto de tensión como de intensidad.
A continuación se analizarán cada uno de los factores que pueden interveniren el modo de funcionamiento de los �ltros sintonizados.
5.4.1 Distorsión de tensión e intensidad
En las �guras 5.11 a 5.13 se muestran el valor e�caz de intensidad, la capacidaddel condensador óptimo y la distorsión de intensidad al instalar un �ltro para elquinto armónico, cuando se varía la distorsión de tensión de la red e intensidadde la carga.
En la Figura 5.11 se puede apreciar que si se mantiene la distorsión de ten-sión constante, el valor e�caz de intensidad disminuye conforme la distorsiónde intensidad aumenta. Este efecto, que en un principio puede parecer con-tradictorio si se compara con el caso de compensación mediante condensador,es lógico debido a que cuanto mayor es la distorsión de intensidad, mayor será
98
Ejemplos de aplicación
010
2030
4050
0
1
2
3
40.75
0.8
0.85
THDi (%)THDu (%)
Nor
ma
de in
tens
idad
(p.
u.)
Figura 5.11: Compensación con �ltro sintonizado. Valor e�caz de intensidad frente
a distorsión de tensión e intensidad.
el contenido de quinto armónico que se elimina al instalar el �ltro. Por otraparte, para una distorsión de intensidad constante, la compensación de poten-cia reactiva empeora cuando aumenta la distorsión de tensión, pues crecen losarmónicos que circulan por la red debido a dicha tensión. Por tanto, se obten-drán mejores características relativas de compensación cuando la distorsión detensión sea reducida y la de intensidad elevada.
El valor de la capacidad del condensador óptimo frente a las distorsiones detensión e intensidad, mostrado en la Figura 5.12, tiene un claro comportamien-to. Si se mantiene constante la distorsión de tensión, el valor de la capacidaddel condensador disminuye conforme la distorsión de intensidad aumenta, de-bido a que cuanto mayor sea el armónico que se está �ltrando, menor será lacapacidad del condensador necesario para conseguir una mejor reducción deintensidad reactiva. Igual comportamiento se tiene cuando se deja constante ladistorsión de intensidad y aumenta la de tensión, pero debido a diferente cau-sa: con el aumento de la distorsión de tensión, si se aumenta mucho el valor dela capacidad del condensador, se empeora la compensación por la circulaciónde armónicos de orden elevado hacia la carga.
La distorsión de intensidad, mostrada en la Figura 5.13, para el caso consi-derado es más sensible a las variaciones de distorsión de la tensión de alimen-tación que a las de la intensidad de la carga no lineal. Si se mantiene constantela distorsión de tensión se observa cómo la distorsión de intensidad disminuye
99
Capítulo 5 Ejemplos de aplicación
010
2030
4050 0
1
2
3
4
2.05
2.1
2.15
2.2
2.25
2.3
2.35
x 10−4
THDu (%)
THDi (%)
Con
dens
ador
ópt
imo
(s/r
ad)
Figura 5.12: Compensación con �ltro sintonizado. Capacidad del condensador óp-
timo frente a distorsión de tensión e intensidad.
conforme aumenta la distorsión de intensidad, por la misma razón explicadapara el caso del valor e�caz de la intensidad.
010
2030
4050
0
1
2
3
4
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
THDu (%)
THDi (%)
TH
Di r
elat
ivo
(p.u
.)
Figura 5.13: Compensación con �ltro sintonizado. Distorsión de intensidad frente
a distorsión de tensión e intensidad.
100
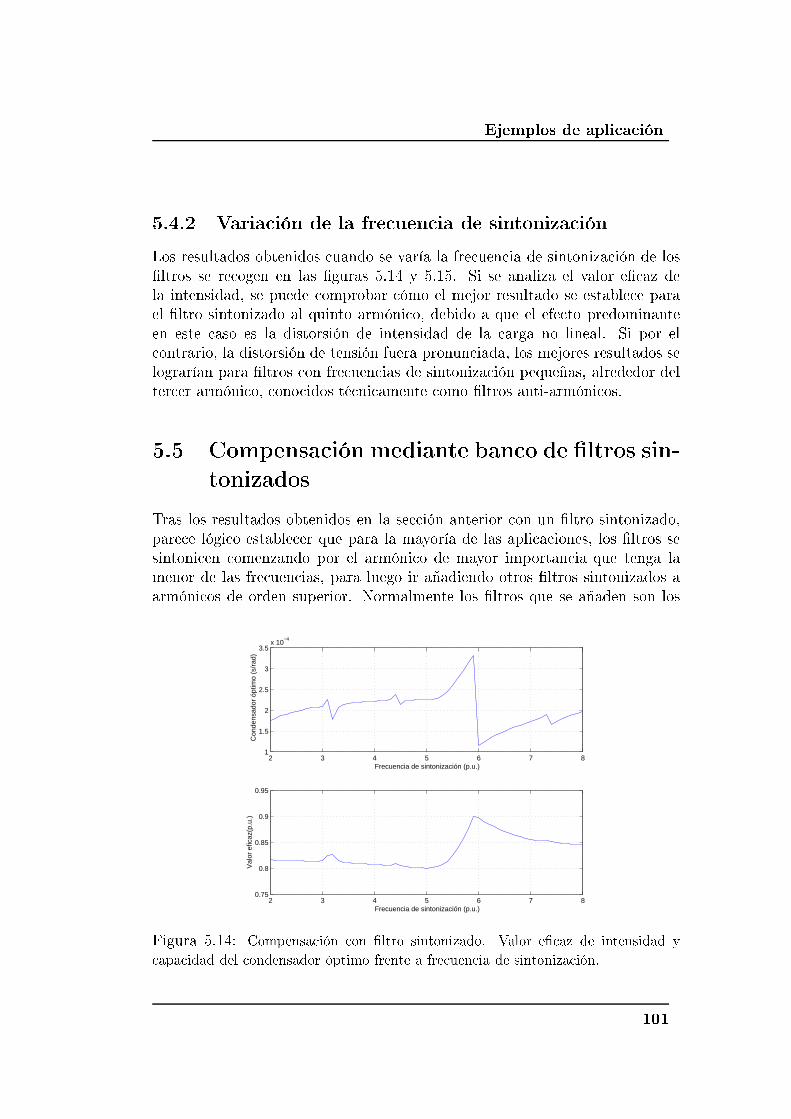
Ejemplos de aplicación
5.4.2 Variación de la frecuencia de sintonización
Los resultados obtenidos cuando se varía la frecuencia de sintonización de los�ltros se recogen en las �guras 5.14 y 5.15. Si se analiza el valor e�caz dela intensidad, se puede comprobar cómo el mejor resultado se establece parael �ltro sintonizado al quinto armónico, debido a que el efecto predominanteen este caso es la distorsión de intensidad de la carga no lineal. Si por elcontrario, la distorsión de tensión fuera pronunciada, los mejores resultados selograrían para �ltros con frecuencias de sintonización pequeñas, alrededor deltercer armónico, conocidos técnicamente como �ltros anti-armónicos.
5.5 Compensación mediante banco de �ltros sin-tonizados
Tras los resultados obtenidos en la sección anterior con un �ltro sintonizado,parece lógico establecer que para la mayoría de las aplicaciones, los �ltros sesintonicen comenzando por el armónico de mayor importancia que tenga lamenor de las frecuencias, para luego ir añadiendo otros �ltros sintonizados aarmónicos de orden superior. Normalmente los �ltros que se añaden son los
2 3 4 5 6 7 81
1.5
2
2.5
3
3.5x 10
−4
Frecuencia de sintonización (p.u.)
Con
dens
ador
ópt
imo
(s/r
ad)
2 3 4 5 6 7 80.75
0.8
0.85
0.9
0.95
Frecuencia de sintonización (p.u.)
Val
or e
ficaz
(p.u
.)
Figura 5.14: Compensación con �ltro sintonizado. Valor e�caz de intensidad y
capacidad del condensador óptimo frente a frecuencia de sintonización.
101
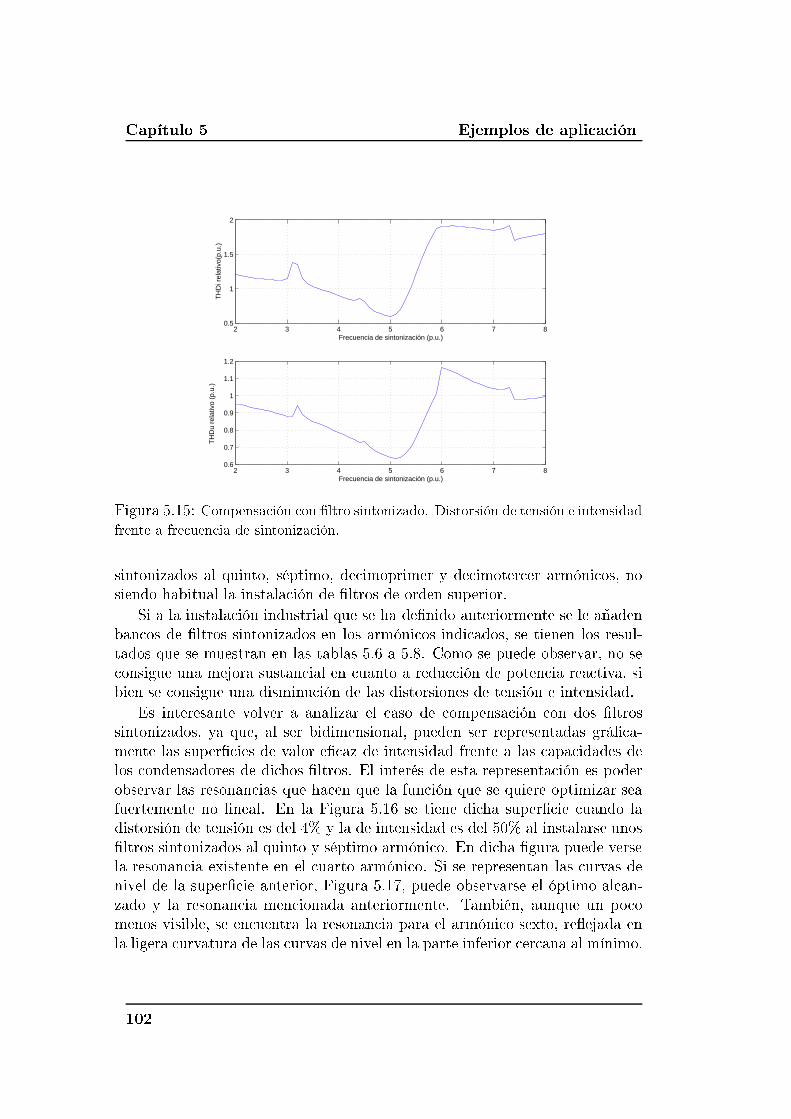
Capítulo 5 Ejemplos de aplicación
2 3 4 5 6 7 80.5
1
1.5
2
Frecuencia de sintonización (p.u.)
TH
Di r
elat
ivo(
p.u.
)
2 3 4 5 6 7 80.6
0.7
0.8
0.9
1
1.1
1.2
Frecuencia de sintonización (p.u.)
TH
Du
rela
tivo
(p.u
.)
Figura 5.15: Compensación con �ltro sintonizado. Distorsión de tensión e intensidad
frente a frecuencia de sintonización.
sintonizados al quinto, séptimo, decimoprimer y decimotercer armónicos, nosiendo habitual la instalación de �ltros de orden superior.
Si a la instalación industrial que se ha de�nido anteriormente se le añadenbancos de �ltros sintonizados en los armónicos indicados, se tienen los resul-tados que se muestran en las tablas 5.6 a 5.8. Como se puede observar, no seconsigue una mejora sustancial en cuanto a reducción de potencia reactiva, sibien se consigue una disminución de las distorsiones de tensión e intensidad.
Es interesante volver a analizar el caso de compensación con dos �ltrossintonizados, ya que, al ser bidimensional, pueden ser representadas grá�ca-mente las super�cies de valor e�caz de intensidad frente a las capacidades delos condensadores de dichos �ltros. El interés de esta representación es poderobservar las resonancias que hacen que la función que se quiere optimizar seafuertemente no lineal. En la Figura 5.16 se tiene dicha super�cie cuando ladistorsión de tensión es del 4% y la de intensidad es del 50% al instalarse unos�ltros sintonizados al quinto y séptimo armónico. En dicha �gura puede versela resonancia existente en el cuarto armónico. Si se representan las curvas denivel de la super�cie anterior, Figura 5.17, puede observarse el óptimo alcan-zado y la resonancia mencionada anteriormente. También, aunque un pocomenos visible, se encuentra la resonancia para el armónico sexto, re�ejada enla ligera curvatura de las curvas de nivel en la parte inferior cercana al mínimo.
102
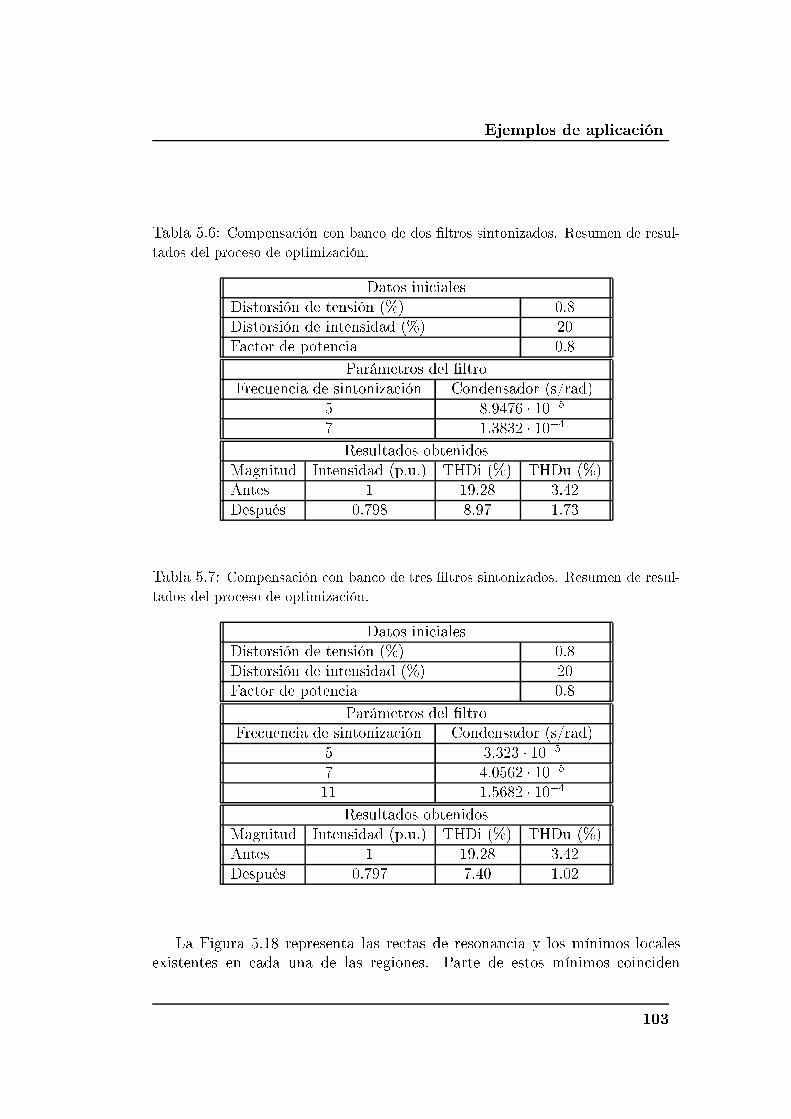
Ejemplos de aplicación
Tabla 5.6: Compensación con banco de dos �ltros sintonizados. Resumen de resul-
tados del proceso de optimización.
Datos inicialesDistorsión de tensión (%) 0.8Distorsión de intensidad (%) 20Factor de potencia 0.8
Parámetros del �ltroFrecuencia de sintonización Condensador (s/rad)
5 8:9476 � 10�57 1:3832 � 10�4
Resultados obtenidosMagnitud Intensidad (p.u.) THDi (%) THDu (%)Antes 1 19.28 3.42Después 0.798 8.97 1.73
Tabla 5.7: Compensación con banco de tres �ltros sintonizados. Resumen de resul-
tados del proceso de optimización.
Datos inicialesDistorsión de tensión (%) 0.8Distorsión de intensidad (%) 20Factor de potencia 0.8
Parámetros del �ltroFrecuencia de sintonización Condensador (s/rad)
5 3:323 � 10�57 4:0562 � 10�511 1:5682 � 10�4
Resultados obtenidosMagnitud Intensidad (p.u.) THDi (%) THDu (%)Antes 1 19.28 3.42Después 0.797 7.40 1.02
La Figura 5.18 representa las rectas de resonancia y los mínimos localesexistentes en cada una de las regiones. Parte de estos mínimos coinciden
103
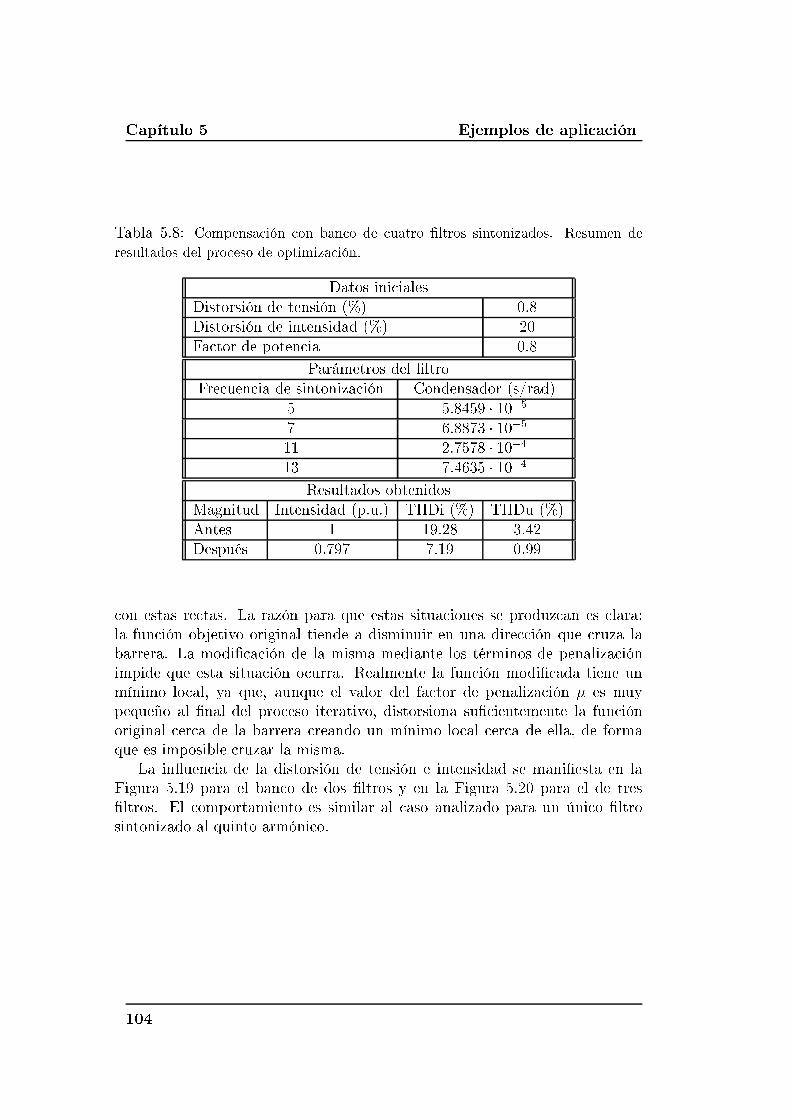
Capítulo 5 Ejemplos de aplicación
Tabla 5.8: Compensación con banco de cuatro �ltros sintonizados. Resumen de
resultados del proceso de optimización.
Datos inicialesDistorsión de tensión (%) 0.8Distorsión de intensidad (%) 20Factor de potencia 0.8
Parámetros del �ltroFrecuencia de sintonización Condensador (s/rad)
5 5:8459 � 10�57 6:8873 � 10�511 2:7578 � 10�413 7:4635 � 10�4
Resultados obtenidosMagnitud Intensidad (p.u.) THDi (%) THDu (%)Antes 1 19.28 3.42Después 0.797 7.19 0.99
con estas rectas. La razón para que estas situaciones se produzcan es clara:la función objetivo original tiende a disminuir en una dirección que cruza labarrera. La modi�cación de la misma mediante los términos de penalizaciónimpide que esta situación ocurra. Realmente la función modi�cada tiene unmínimo local, ya que, aunque el valor del factor de penalización � es muypequeño al �nal del proceso iterativo, distorsiona su�cientemente la funciónoriginal cerca de la barrera creando un mínimo local cerca de ella, de formaque es imposible cruzar la misma.
La in�uencia de la distorsión de tensión e intensidad se mani�esta en laFigura 5.19 para el banco de dos �ltros y en la Figura 5.20 para el de tres�ltros. El comportamiento es similar al caso analizado para un único �ltrosintonizado al quinto armónico.
104
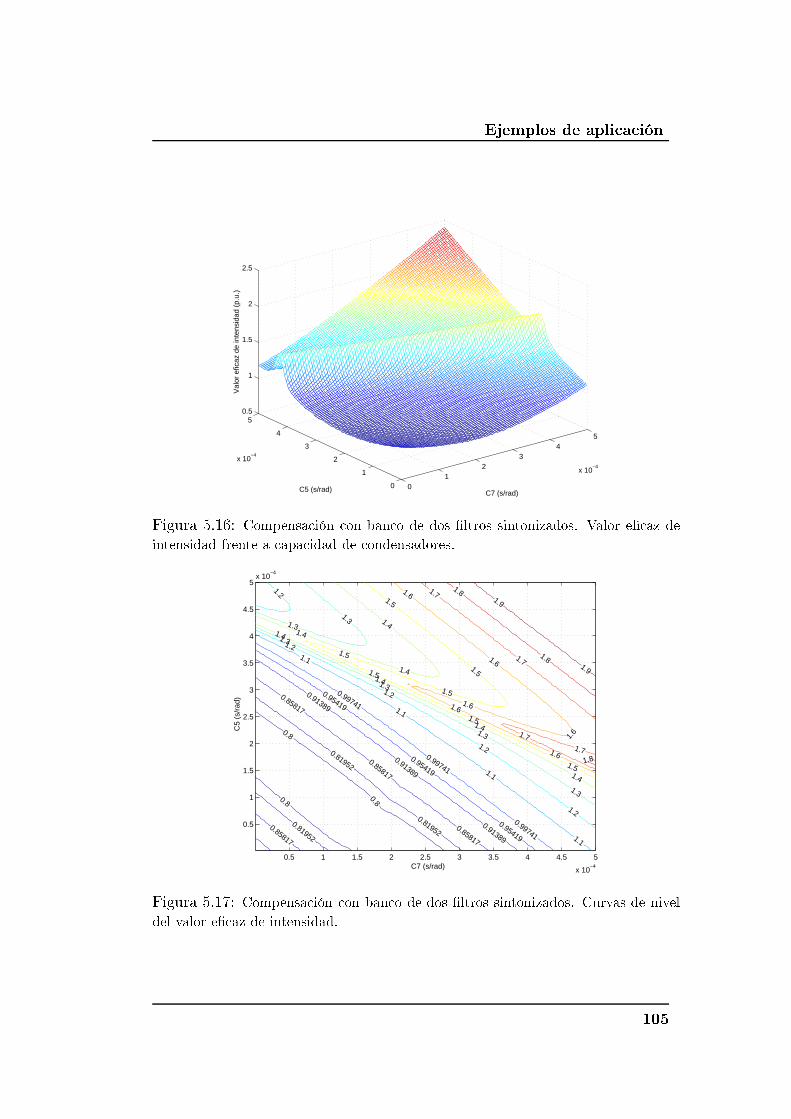
Ejemplos de aplicación
01
23
45
x 10−4
0
1
2
3
4
5
x 10−4
0.5
1
1.5
2
2.5
C7 (s/rad)C5 (s/rad)
Val
or e
ficaz
de
inte
nsid
ad (
p.u.
)
Figura 5.16: Compensación con banco de dos �ltros sintonizados. Valor e�caz de
intensidad frente a capacidad de condensadores.
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10−4
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
−4
C7 (s/rad)
C5
(s/r
ad)
0.8
0.8
0.8
0.81952
0.81952
0.81952
0.85817
0.85817
0.85817
0.85817
0.91389
0.91389
0.91389
0.95419
0.95419
0.95419
0.99741
0.99741
0.99741
1.1
1.1
1.1
1.1
1.2
1.2
1.2
1.2
1.2
1.31.3
1.3
1.3
1.3
1.3
1.4
1.4
1.41.4
1.4
1.4
1.4
1.5
1.5
1.5
1.5
1.5
1.5
1.5
1.6
1.6
1.6
1.61.6
1.6
1.7
1.7
1.7
1.7
1.8
1.8
1.8
1.9
1.9
Figura 5.17: Compensación con banco de dos �ltros sintonizados. Curvas de nivel
del valor e�caz de intensidad.
105
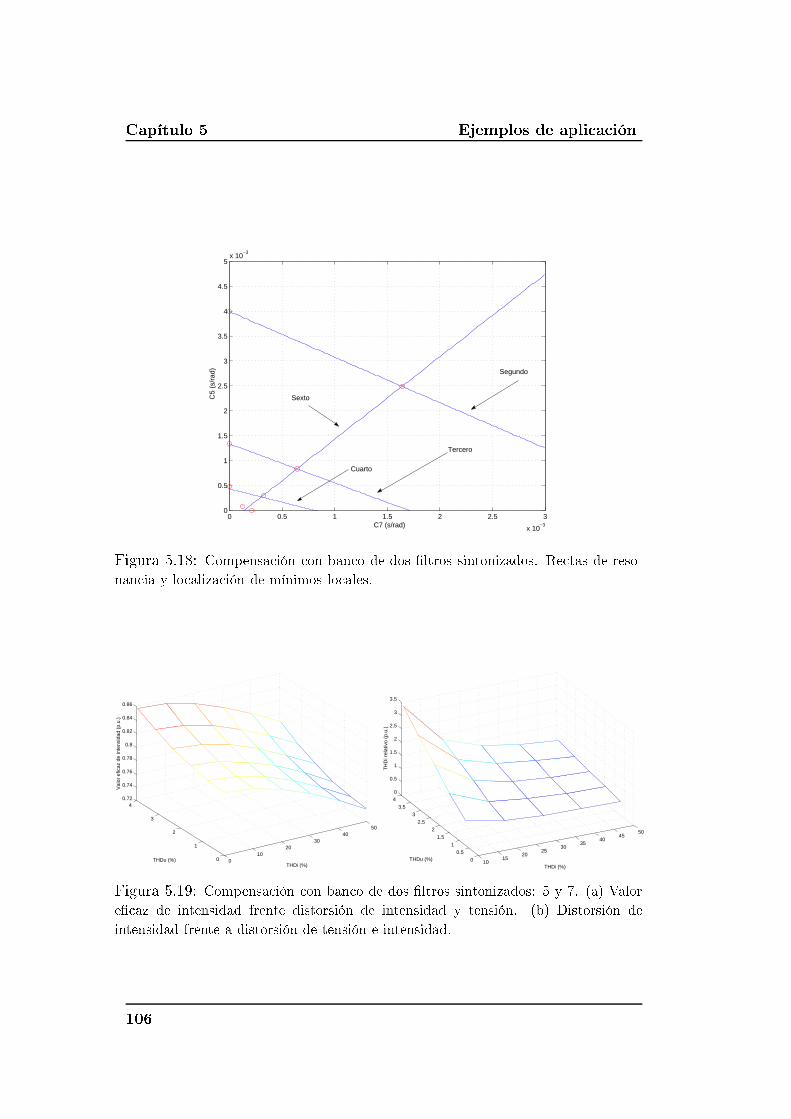
Capítulo 5 Ejemplos de aplicación
0 0.5 1 1.5 2 2.5 3
x 10−3
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
−3
C7 (s/rad)
C5
(s/r
ad)
Cuarto
Segundo
Sexto
Tercero
Figura 5.18: Compensación con banco de dos �ltros sintonizados. Rectas de reso-
nancia y localización de mínimos locales.
010
2030
4050
0
1
2
3
40.72
0.74
0.76
0.78
0.8
0.82
0.84
0.86
THDi (%)THDu (%)
Val
or e
ficaz
de
inte
nsid
ad (
p.u.
)
1015
2025
3035
4045
50
0
0.5
1
1.5
22.5
3
3.5
40
0.5
1
1.5
2
2.5
3
3.5
THDi (%)
THDu (%)
TH
Di r
elat
ivo
(p.u
.)
Figura 5.19: Compensación con banco de dos �ltros sintonizados: 5 y 7. (a) Valor
e�caz de intensidad frente distorsión de intensidad y tensión. (b) Distorsión de
intensidad frente a distorsión de tensión e intensidad.
106

Ejemplos de aplicación
010
2030
4050
0
1
2
3
40.72
0.74
0.76
0.78
0.8
0.82
0.84
0.86
THDi (%)THDu (%)
Inte
nsid
ad e
ficaz
(p.
u.)
1015
2025
3035
4045
50
0
1
2
3
40
0.5
1
1.5
2
2.5
3
3.5
THDi (%)THDu (%)
TH
Di r
elat
ivo
(p.u
.)
Figura 5.20: Compensación con banco de tres �ltros sintonizados: 5, 7 y 11. (a)
Valor e�caz de intensidad frente distorsión de intensidad y tensión. (b) Distorsión
de intensidad frente a distorsión de tensión e intensidad.
5.6 Aspectos numéricos del algoritmo
En este apartado se analizarán los aspectos numéricos más relevantes del al-goritmo de punto interior desarrollado para optimizar los componentes de los�ltros pasivos sintonizados.
5.6.1 Zonas factibles
Las zonas factibles son las regiones delimitadas por las rectas de resonanciadentro de las cuales deben ser buscados los mínimos locales. El número deestas zonas es función no sólo de los armónicos existentes en el sistema, sinodel número de �ltros pasivos que se instalan y de los armónicos a los cualesestán sintonizados dichos �ltros. El número de zonas a estudiar aumenta con-siderablemente con el número de �ltros instalados. Este resultado es lógico,pues no debe olvidarse que las zonas factibles están contenidas en el conjuntoformado por 2m elementos, siendo m los armónicos que tienen valores o bieninferiores a las frecuencias de sintonización de los �ltros, o entre las mismas.Para el ejemplo propuesto, en la Tabla 5.9 se detallan el número de regionesque el algoritmo de detección de zonas factibles tiene que analizar y el nú-mero de zonas factibles en las que se tiene que calcular el mínimo local, enfunción del número de �ltros a instalar, siendo las frecuencias de sintonizaciónlas correspondientes a los órdenes 5, 7, 11 y 13.
107
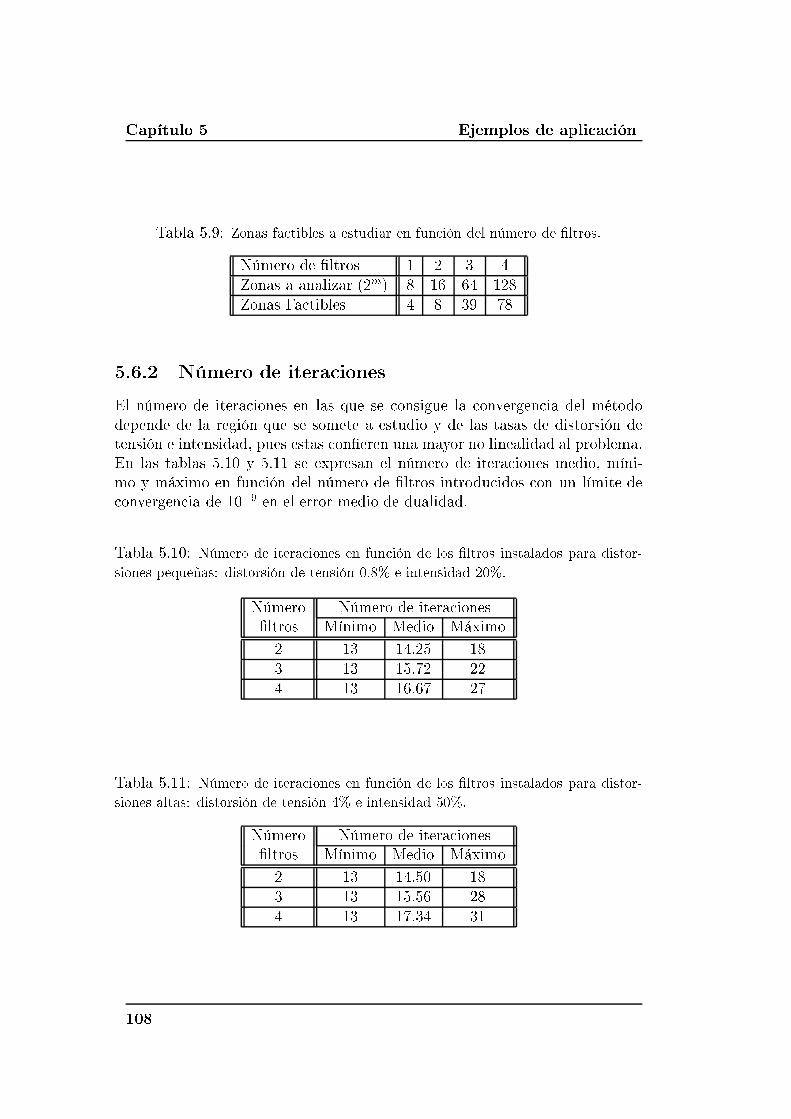
Capítulo 5 Ejemplos de aplicación
Tabla 5.9: Zonas factibles a estudiar en función del número de �ltros.
Número de �ltros 1 2 3 4Zonas a analizar (2m) 8 16 64 128Zonas Factibles 4 8 39 78
5.6.2 Número de iteraciones
El número de iteraciones en las que se consigue la convergencia del métododepende de la región que se somete a estudio y de las tasas de distorsión detensión e intensidad, pues estas con�eren una mayor no linealidad al problema.En las tablas 5.10 y 5.11 se expresan el número de iteraciones medio, míni-mo y máximo en función del número de �ltros introducidos con un límite deconvergencia de 10�9 en el error medio de dualidad.
Tabla 5.10: Número de iteraciones en función de los �ltros instalados para distor-
siones pequeñas: distorsión de tensión 0.8% e intensidad 20%.
Número Número de iteraciones�ltros Mínimo Medio Máximo
2 13 14.25 183 13 15.72 224 13 16.67 27
Tabla 5.11: Número de iteraciones en función de los �ltros instalados para distor-
siones altas: distorsión de tensión 4% e intensidad 50%.
Número Número de iteraciones�ltros Mínimo Medio Máximo
2 13 14.50 183 13 15.56 284 13 17.34 31
108
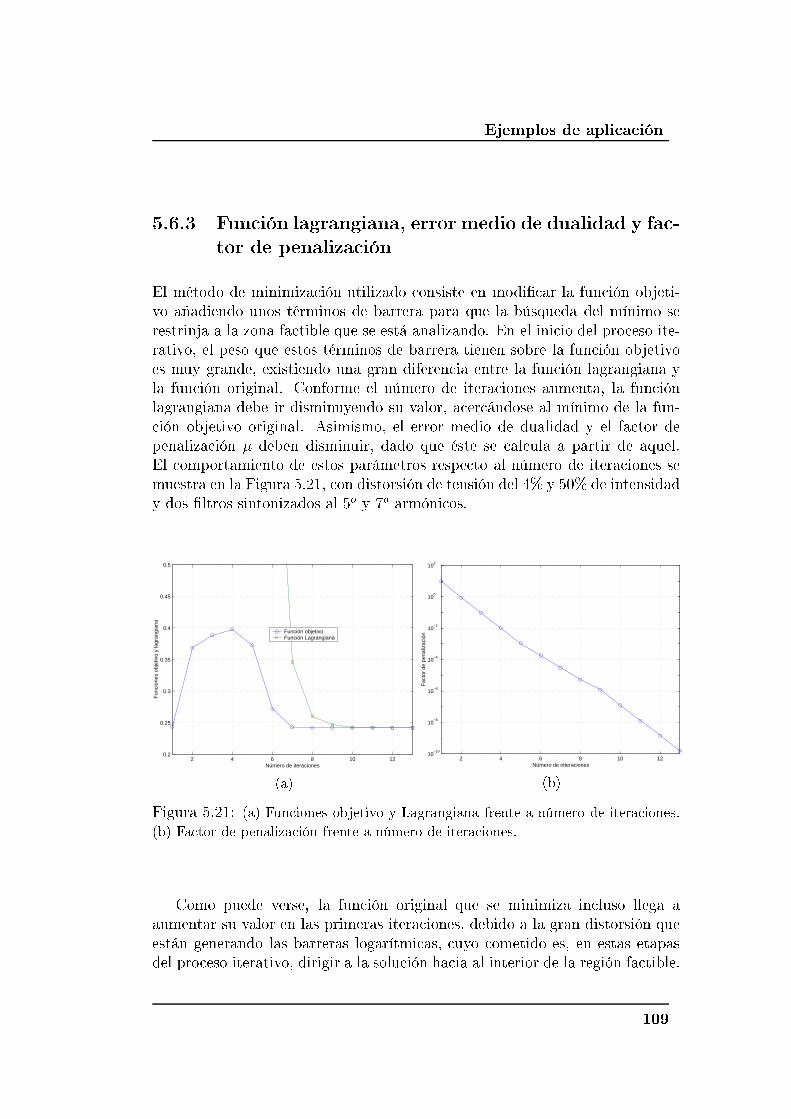
Ejemplos de aplicación
5.6.3 Función lagrangiana, error medio de dualidad y fac-
tor de penalización
El método de minimización utilizado consiste en modi�car la función objeti-vo añadiendo unos términos de barrera para que la búsqueda del mínimo serestrinja a la zona factible que se está analizando. En el inicio del proceso ite-rativo, el peso que estos términos de barrera tienen sobre la función objetivoes muy grande, existiendo una gran diferencia entre la función lagrangiana yla función original. Conforme el número de iteraciones aumenta, la funciónlagrangiana debe ir disminuyendo su valor, acercándose al mínimo de la fun-ción objetivo original. Asimismo, el error medio de dualidad y el factor depenalización � deben disminuir, dado que éste se calcula a partir de aquel.El comportamiento de estos parámetros respecto al número de iteraciones semuestra en la Figura 5.21, con distorsión de tensión del 4% y 50% de intensidady dos �ltros sintonizados al 5o y 7o armónicos.
2 4 6 8 10 120.2
0.25
0.3
0.35
0.4
0.45
0.5
Número de iteraciones
Fun
cion
es o
bjet
ivo
y la
gran
gian
a
Función objetivo Función Lagrangiana
(a)
2 4 6 8 10 1210
−10
10−8
10−6
10−4
10−2
100
102
Número de interaciones
Fac
tor
de p
enal
izac
ión
(b)
Figura 5.21: (a) Funciones objetivo y Lagrangiana frente a número de iteraciones.
(b) Factor de penalización frente a número de iteraciones.
Como puede verse, la función original que se minimiza incluso llega aaumentar su valor en las primeras iteraciones, debido a la gran distorsión queestán generando las barreras logarítmicas, cuyo cometido es, en estas etapasdel proceso iterativo, dirigir a la solución hacia al interior de la región factible.
109
Capítulo 5 Ejemplos de aplicación
5.6.4 Evolución de la función objetivo con el número de
iteraciones
El análisis de la compensación mediante dos �ltros sintonizados tiene la ven-taja de poder representar la super�cie de la función que se está minimizandofrente al valor de las capacidades de los condensadores. Si se representa dichasuper�cie a lo largo de varias etapas del proceso de optimización se puedenapreciar los cambios de la misma debido a la modi�cación del factor de pena-lización. En la Figura 5.22 pueden verse las curvas de nivel de dicha super�ciepara el mismo ejemplo expuesto anteriormente. En ellas se puede ver clara-mente cómo la restricción correspondiente a la resonancia del sexto armónicova disminuyendo su amplitud conforme el número de iteraciones aumenta. Al�nal del proceso iterativo esta resonancia, que no es demasiado importante de-bido al escaso valor que este armónico posee, adquiere su forma original. Sinembargo, a pesar de su escaso valor, la resonancia tiene importantes efectoscualitativos, pues como se puede comprobar en la Figura 5.22.(d), existen doscuencas bien de�nidas a la izquierda y derecha de la misma. Con un método deminimización convencional que no utilice las restricciones propuestas, alcanzarun mínimo u otro depende de la solución inicial adoptada.
Por otra parte, también es interesante comparar las distintas direccionesdel gradiente en cada paso del proceso iterativo en comparación con el míni-mo de la región que se muestra en la Figura 5.22.(d). Cuando el factor depenalización es alto, �guras 5.22.(a) y 5.22.(b), la barrera logarítmica situadaen la resonancia del sexto armónico es la parte predominante de la funciónlagrangiana, por lo que el gradiente tiende hacia puntos que se alejan de di-cha restricción. Conforme el factor de penalización decrece, �guras 5.22.(c)y 5.22.(d), la función lagrangiana se parece más a la función original lejos dela barrera impuesta, por lo que el gradiente tiende hacia el mínimo de dichafunción.
5.7 Resumen del capítulo
En este capítulo se ha aplicado el algoritmo de optimización de �ltros pasivos,desarrollado en el Capítulo 4, a una red de distribución concreta. Los paráme-tros que in�uyen en el diseño de los �ltros son múltiples: distorsión de tensiónde la red de distribución, impedancia hasta el punto en el que se instalan los�ltros pasivos, distorsión de intensidad de la carga a compensar, etc. En estesentido, el objetivo que se ha perseguido es estudiar la compensación realizadaen función de los mismos. La compensación se ha caracterizado en función de
110

Ejemplos de aplicación
0.8 1 1.2 1.4 1.6 1.8 2
x 10−4
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2x 10
−4
C7 (s/rad)
C5
(s/r
ad)
910
910
910
915
915
915
915
920
920
920
920
925
925
925
925
950
950
950
950
950
950975
975
975
975
975
975
9751000
1000
10001000 1050
Dirección delGradiente
(a)
0.8 1 1.2 1.4 1.6 1.8 2
x 10−4
2
4
6
8
10
12
14
16
18
x 10−5
C7 (s/rad)
C5
(s/r
ad)
0.82
0.82
0.82
0.82
0.82
0.82
0.82
0.83
0.83
0.83
0.83
0.83
0.830.83
0.83
0.84
0.84
0.84
0.84
0.84
0.84
0.84
0.87
0.87
0.87
0.87
0.87
0.89
0.89
0.89
0.890.92
0.92
0.92
0.94
0.94
0.96
0.96
0.98Dirección delGradiente
(c)
1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
x 10−4
2
4
6
8
10
12
14
16
18
x 10−5
C7 (s/rad)C
5 (s
/rad
)
11.4
11.5
11.5
11.5
11.75
11.75
11.75
11.75
11.7
5
12
12
12
12
12
12
1212.25
12.25
12.25
12.25
12.25
12.2
5
12.2512 5
12.512.5
12.5
Dirección delGradiente
(b)
0.8 1 1.2 1.4 1.6 1.8 2
x 10−4
2
4
6
8
10
12
14
16
18
x 10−5
C7 (s/rad)
C5
(s/r
ad)
0.62
0.62
0.62
0.62
0.62
0.63
0.63
0.63
0.63
0.63
0.63
0.63
0.64
0.64
0.64
0.64
0.64
0.64
0.65
0.65
0.65
0.65
0.65
0.65
0.675
0.675
0.675
0.6750.7
0.7
0.7
0.7
0.75
0.75
0.80.85
Dirección delGradiente
(d)
Figura 5.22: Curvas de nivel de la función lagrangiana. (a) Iteración 1. (b) Iteración
3. (c) Iteración 5. (d) Iteración 10
cuatro magnitudes: capacidades de los condensadores de los �ltros a instalar,valor e�caz de la intensidad del sistema, distorsión de intensidad y distorsiónde tensión, todos ellos después de la compensación.
Por otra parte, también se ha realizado un análisis de los aspectos numéri-cos del algoritmo de punto interior utilizado para optimizar los �ltros pasivos.Concretamente, se analizan las zonas factibles a estudiar, el número de itera-ciones en las que se alcanza el óptimo, la evolución de la función lagrangianay la evolución de la función objetivo en el caso bidimensional, lo cual da unavisión muy clara de la modi�cación sufrida por la adición de las barreras.
Una vez estudiado de forma exhaustiva el comportamiento que el algoritmo
111

Capítulo 5 Ejemplos de aplicación
presenta en un caso particular, se propone realizar la validación experimentaldel procedimiento teórico descrito, lo cual se desarrollará en el siguiente capí-tulo.
112
Capítulo 6
Validación experimental
6.1 Introducción
En este capítulo se pretende corroborar de forma experimental el método dediseño de �ltros pasivos desarrollado. Para ello se ha montado en el laboratoriouna red de distribución a escala similar a la utilizada en el Capítulo 5 parailustrar la in�uencia los diferentes parámetros que intervienen en el proceso deoptimización. Las líneas y transformadores se reproducen mediante el uso deimpedancias, al igual que la parte lineal de la carga, mientras que la carga nolineal es un accionamiento de velocidad variable.
Para proceder a la medida de tensiones e intensidades de la red, se desarrollaun instrumento virtual basado en una tarjeta de adquisición de datos y enel software comercial LabView. Dicha tarjeta recibe las señales provenientesde los sensores de tensión e intensidad que se distribuyen por de la red dedistribución construida.
Antes de acometer el diseño del �ltro pasivo mediante las consideracionesexpuestas en el Capítulo 4, se procede a realizar la compensación de poten-cia reactiva con condensadores, y así evaluar una primera comparación entrelos resultados teóricos y experimentales. En esta comparación se compruebaque la intensidad que la carga no lineal demanda de la red dependen fuer-temente de la tensión existente en sus bornas. De esta forma, si bien en elproceso de optimización se sigue manteniendo esta intensidad constante, parapoder establecer una comparación más precisa entre los resultados teóricos yexperimentales se desarrolla un modelo de la carga no lineal en el Apéndice A.
Por último, se procede al diseño e instalación del �ltro pasivo para com-pensar la potencia reactiva de la instalación y mitigar los armónicos relevantesdel sistema.
113
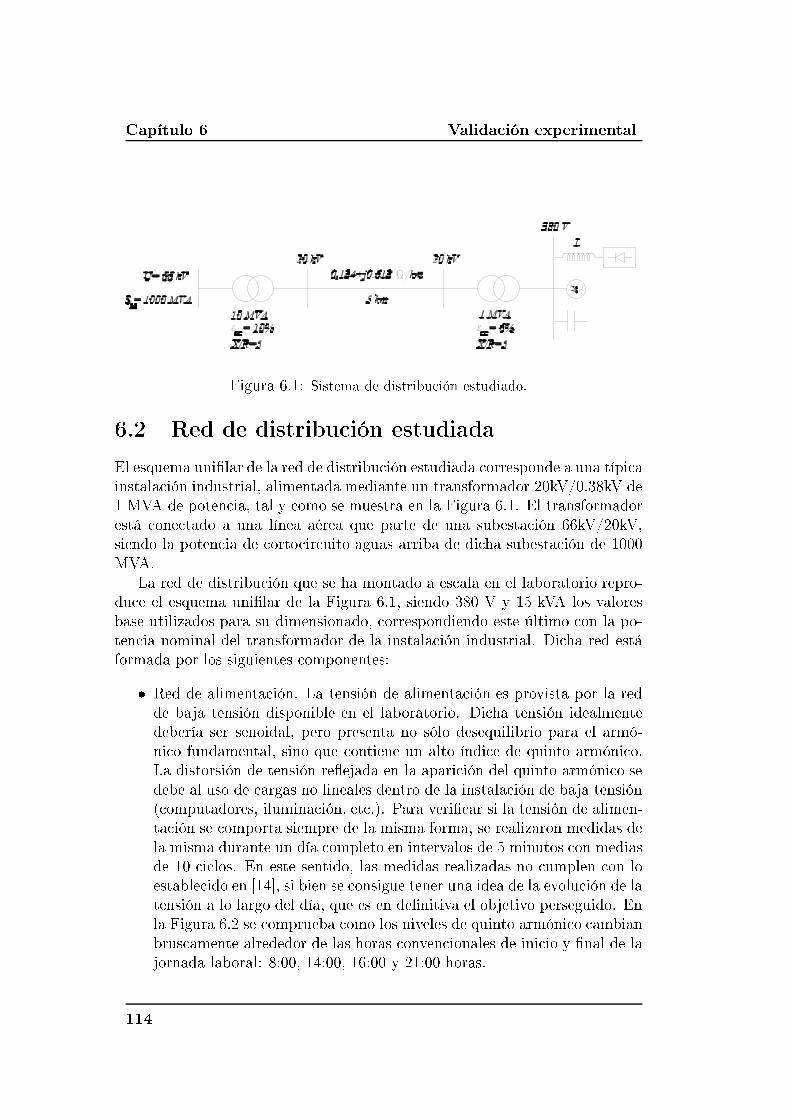
Capítulo 6 Validación experimental
Figura 6.1: Sistema de distribución estudiado.
6.2 Red de distribución estudiada
El esquema uni�lar de la red de distribución estudiada corresponde a una típicainstalación industrial, alimentada mediante un transformador 20kV/0.38kV de1 MVA de potencia, tal y como se muestra en la Figura 6.1. El transformadorestá conectado a una línea aérea que parte de una subestación 66kV/20kV,siendo la potencia de cortocircuito aguas arriba de dicha subestación de 1000MVA.
La red de distribución que se ha montado a escala en el laboratorio repro-duce el esquema uni�lar de la Figura 6.1, siendo 380 V y 15 kVA los valoresbase utilizados para su dimensionado, correspondiendo este último con la po-tencia nominal del transformador de la instalación industrial. Dicha red estáformada por los siguientes componentes:
� Red de alimentación. La tensión de alimentación es provista por la redde baja tensión disponible en el laboratorio. Dicha tensión idealmentedebería ser senoidal, pero presenta no sólo desequilibrio para el armó-nico fundamental, sino que contiene un alto índice de quinto armónico.La distorsión de tensión re�ejada en la aparición del quinto armónico sedebe al uso de cargas no lineales dentro de la instalación de baja tensión(computadores, iluminación, etc.). Para veri�car si la tensión de alimen-tación se comporta siempre de la misma forma, se realizaron medidas dela misma durante un día completo en intervalos de 5 minutos con mediasde 10 ciclos. En este sentido, las medidas realizadas no cumplen con loestablecido en [14], si bien se consigue tener una idea de la evolución de latensión a lo largo del día, que es en de�nitiva el objetivo perseguido. Enla Figura 6.2 se comprueba como los niveles de quinto armónico cambianbruscamente alrededor de las horas convencionales de inicio y �nal de lajornada laboral: 8:00, 14:00, 16:00 y 21:00 horas.
114
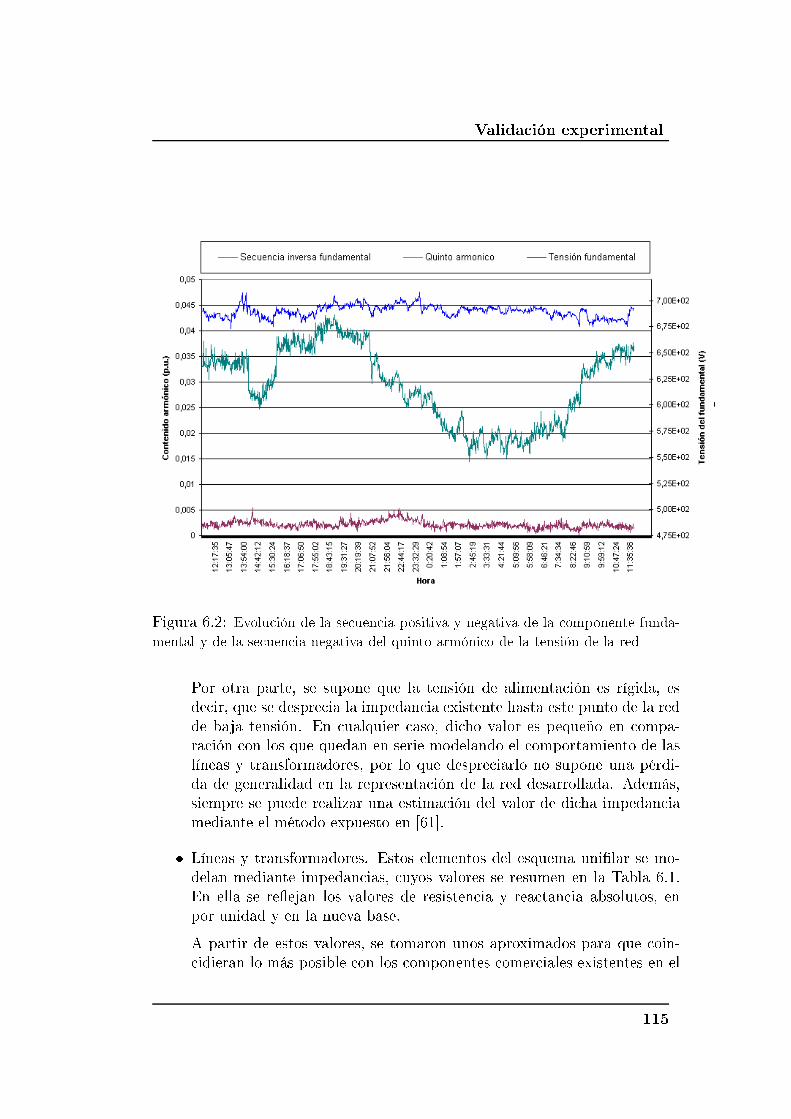
Validación experimental
Figura 6.2: Evolución de la secuencia positiva y negativa de la componente funda-
mental y de la secuencia negativa del quinto armónico de la tensión de la red
Por otra parte, se supone que la tensión de alimentación es rígida, esdecir, que se desprecia la impedancia existente hasta este punto de la redde baja tensión. En cualquier caso, dicho valor es pequeño en compa-ración con los que quedan en serie modelando el comportamiento de laslíneas y transformadores, por lo que despreciarlo no supone una pérdi-da de generalidad en la representación de la red desarrollada. Además,siempre se puede realizar una estimación del valor de dicha impedanciamediante el método expuesto en [61].
� Líneas y transformadores. Estos elementos del esquema uni�lar se mo-delan mediante impedancias, cuyos valores se resumen en la Tabla 6.1.En ella se re�ejan los valores de resistencia y reactancia absolutos, enpor unidad y en la nueva base.
A partir de estos valores, se tomaron unos aproximados para que coin-cidieran lo más posible con los componentes comerciales existentes en el
115
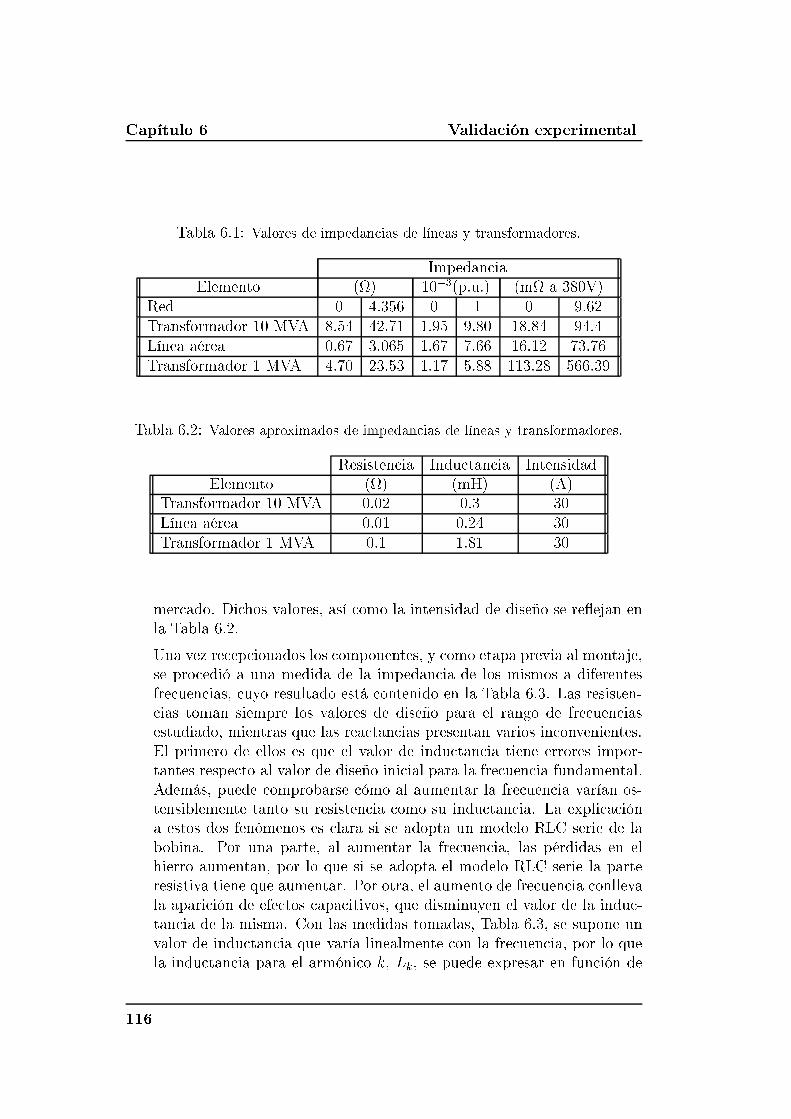
Capítulo 6 Validación experimental
Tabla 6.1: Valores de impedancias de líneas y transformadores.
ImpedanciaElemento () 10�3(p.u.) (m a 380V)
Red 0 4.356 0 1 0 9:62Transformador 10 MVA 8.54 42.71 1:95 9:80 18:84 94:4Línea aérea 0.67 3.065 1:67 7:66 16:12 73:76Transformador 1 MVA 4.70 23.53 1:17 5:88 113:28 566:39
Tabla 6.2: Valores aproximados de impedancias de líneas y transformadores.
Resistencia Inductancia IntensidadElemento () (mH) (A)
Transformador 10 MVA 0.02 0.3 30Línea aérea 0.01 0.24 30Transformador 1 MVA 0.1 1.81 30
mercado. Dichos valores, así como la intensidad de diseño se re�ejan enla Tabla 6.2.
Una vez recepcionados los componentes, y como etapa previa al montaje,se procedió a una medida de la impedancia de los mismos a diferentesfrecuencias, cuyo resultado está contenido en la Tabla 6.3. Las resisten-cias toman siempre los valores de diseño para el rango de frecuenciasestudiado, mientras que las reactancias presentan varios inconvenientes.El primero de ellos es que el valor de inductancia tiene errores impor-tantes respecto al valor de diseño inicial para la frecuencia fundamental.Además, puede comprobarse cómo al aumentar la frecuencia varían os-tensiblemente tanto su resistencia como su inductancia. La explicacióna estos dos fenómenos es clara si se adopta un modelo RLC serie de labobina. Por una parte, al aumentar la frecuencia, las pérdidas en elhierro aumentan, por lo que si se adopta el modelo RLC serie la parteresistiva tiene que aumentar. Por otra, el aumento de frecuencia conllevala aparición de efectos capacitivos, que disminuyen el valor de la induc-tancia de la misma. Con las medidas tomadas, Tabla 6.3, se supone unvalor de inductancia que varía linealmente con la frecuencia, por lo quela inductancia para el armónico k, Lk, se puede expresar en función de
116
Validación experimental
Tabla 6.3: Valores de impedancia de las bobinas para distintas frecuencias.
Resistencia (m) Inductancia (mH)Inductancia 100 Hz 120 Hz 1000 Hz 100 Hz 120 Hz 1000 Hz0.3 mH 0 0 275 0.208 0.208 0.1930.24 mH 0 0 222 0.167 0.167 0.1531.81 mH 2 14 1045 1.558 1.565 1.476
las medidas a 100 y 1000 Hz, L2 y L20 respectivamente:
Lk = L2 +L20 � L2
20� 2(k � 2) (6.1)
Las impedancias que simulan el comportamiento de la línea y los trans-formadores se muestran en la Figura 6.3.
Figura 6.3: Impedancias que simulan el comportamiento de la línea y transforma-
dores.
117
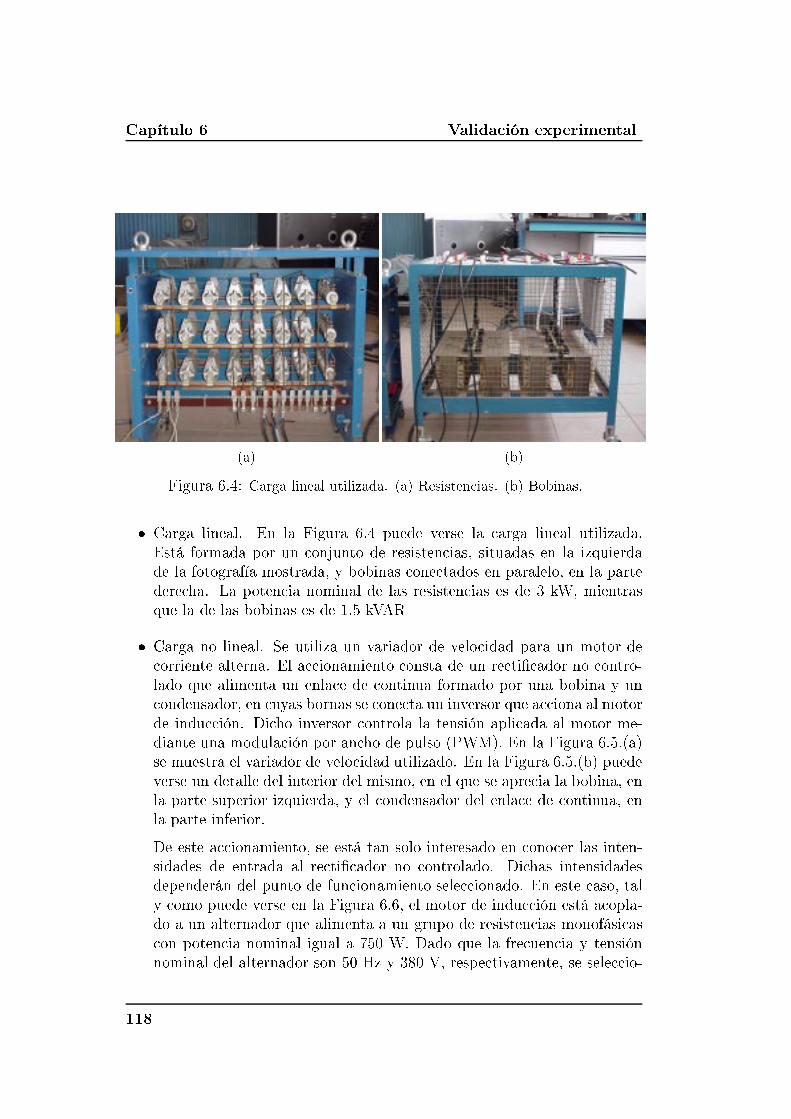
Capítulo 6 Validación experimental
(a) (b)
Figura 6.4: Carga lineal utilizada. (a) Resistencias. (b) Bobinas.
� Carga lineal. En la Figura 6.4 puede verse la carga lineal utilizada.Está formada por un conjunto de resistencias, situadas en la izquierdade la fotografía mostrada, y bobinas conectados en paralelo, en la partederecha. La potencia nominal de las resistencias es de 3 kW, mientrasque la de las bobinas es de 1.5 kVAR
� Carga no lineal. Se utiliza un variador de velocidad para un motor decorriente alterna. El accionamiento consta de un recti�cador no contro-lado que alimenta un enlace de continua formado por una bobina y uncondensador, en cuyas bornas se conecta un inversor que acciona al motorde inducción. Dicho inversor controla la tensión aplicada al motor me-diante una modulación por ancho de pulso (PWM). En la Figura 6.5.(a)se muestra el variador de velocidad utilizado. En la Figura 6.5.(b) puedeverse un detalle del interior del mismo, en el que se aprecia la bobina, enla parte superior izquierda, y el condensador del enlace de continua, enla parte inferior.
De este accionamiento, se está tan solo interesado en conocer las inten-sidades de entrada al recti�cador no controlado. Dichas intensidadesdependerán del punto de funcionamiento seleccionado. En este caso, taly como puede verse en la Figura 6.6, el motor de inducción está acopla-do a un alternador que alimenta a un grupo de resistencias monofásicascon potencia nominal igual a 750 W. Dado que la frecuencia y tensiónnominal del alternador son 50 Hz y 380 V, respectivamente, se seleccio-
118

Validación experimental
(a) (b)
Figura 6.5: Variador de velocidad de alterna utilizado. (a) Exterior. (b) Interior.
Figura 6.6: Grupo motor-generador accionado por el variador de velocidad.
119
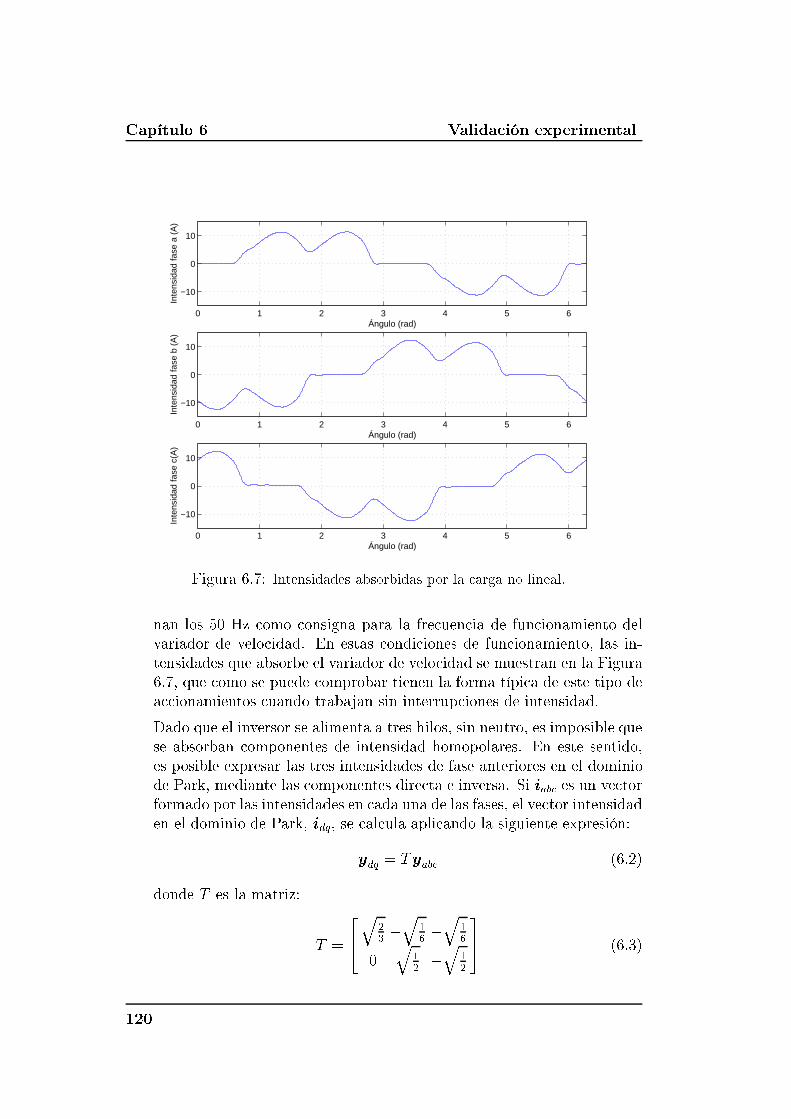
Capítulo 6 Validación experimental
0 1 2 3 4 5 6
−10
0
10
Ángulo (rad)
Inte
nsid
ad fa
se a
(A
)
0 1 2 3 4 5 6
−10
0
10
Ángulo (rad)
Inte
nsid
ad fa
se b
(A
)
0 1 2 3 4 5 6
−10
0
10
Ángulo (rad)
Inte
nsid
ad fa
se c
(A)
Figura 6.7: Intensidades absorbidas por la carga no lineal.
nan los 50 Hz como consigna para la frecuencia de funcionamiento delvariador de velocidad. En estas condiciones de funcionamiento, las in-tensidades que absorbe el variador de velocidad se muestran en la Figura6.7, que como se puede comprobar tienen la forma típica de este tipo deaccionamientos cuando trabajan sin interrupciones de intensidad.
Dado que el inversor se alimenta a tres hilos, sin neutro, es imposible quese absorban componentes de intensidad homopolares. En este sentido,es posible expresar las tres intensidades de fase anteriores en el dominiode Park, mediante las componentes directa e inversa. Si iabc es un vectorformado por las intensidades en cada una de las fases, el vector intensidaden el dominio de Park, idq, se calcula aplicando la siguiente expresión:
ydq = Tyabc (6.2)
donde T es la matriz:
T =
24q
23�q
16�q
16
0q
12�q
12
35 (6.3)
120
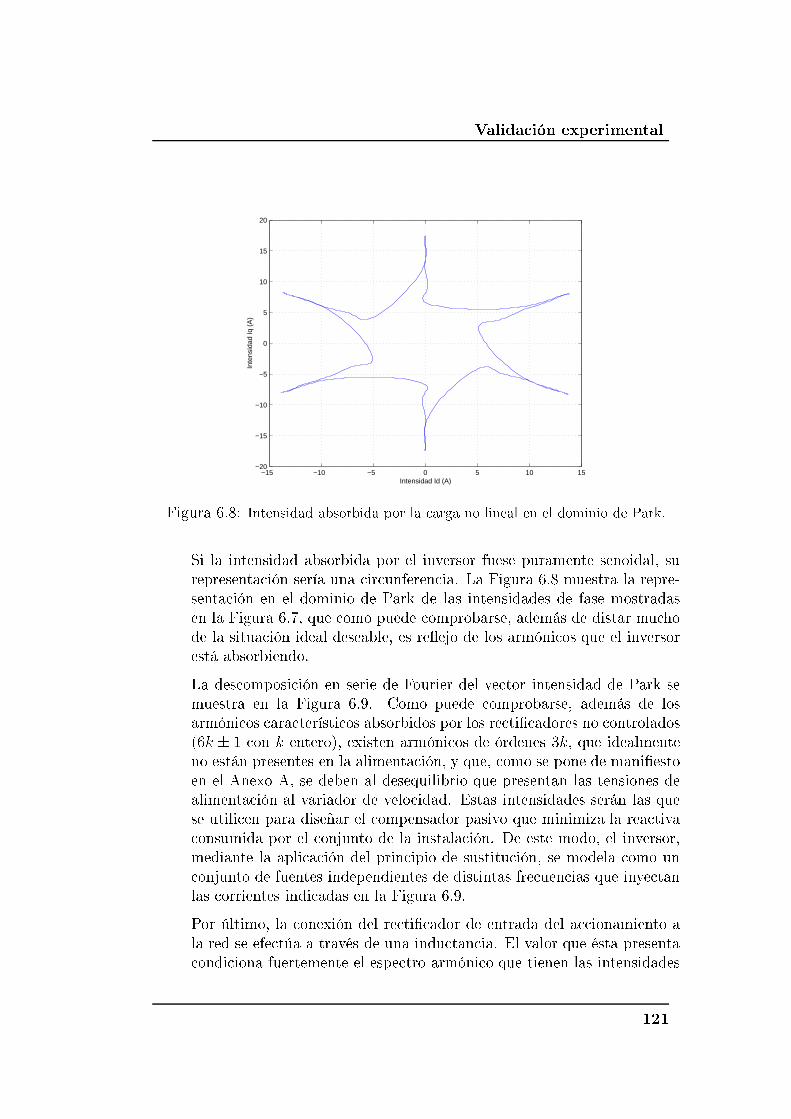
Validación experimental
−15 −10 −5 0 5 10 15−20
−15
−10
−5
0
5
10
15
20
Intensidad Id (A)
Inte
nsid
ad Iq
(A
)
Figura 6.8: Intensidad absorbida por la carga no lineal en el dominio de Park.
Si la intensidad absorbida por el inversor fuese puramente senoidal, surepresentación sería una circunferencia. La Figura 6.8 muestra la repre-sentación en el dominio de Park de las intensidades de fase mostradasen la Figura 6.7, que como puede comprobarse, además de distar muchode la situación ideal deseable, es re�ejo de los armónicos que el inversorestá absorbiendo.
La descomposición en serie de Fourier del vector intensidad de Park semuestra en la Figura 6.9. Como puede comprobarse, además de losarmónicos característicos absorbidos por los recti�cadores no controlados(6k � 1 con k entero), existen armónicos de órdenes 3k, que idealmenteno están presentes en la alimentación, y que, como se pone de mani�estoen el Anexo A, se deben al desequilibrio que presentan las tensiones dealimentación al variador de velocidad. Estas intensidades serán las quese utilicen para diseñar el compensador pasivo que minimiza la reactivaconsumida por el conjunto de la instalación. De este modo, el inversor,mediante la aplicación del principio de sustitución, se modela como unconjunto de fuentes independientes de distintas frecuencias que inyectanlas corrientes indicadas en la Figura 6.9.
Por último, la conexión del recti�cador de entrada del accionamiento ala red se efectúa a través de una inductancia. El valor que ésta presentacondiciona fuertemente el espectro armónico que tienen las intensidades
121
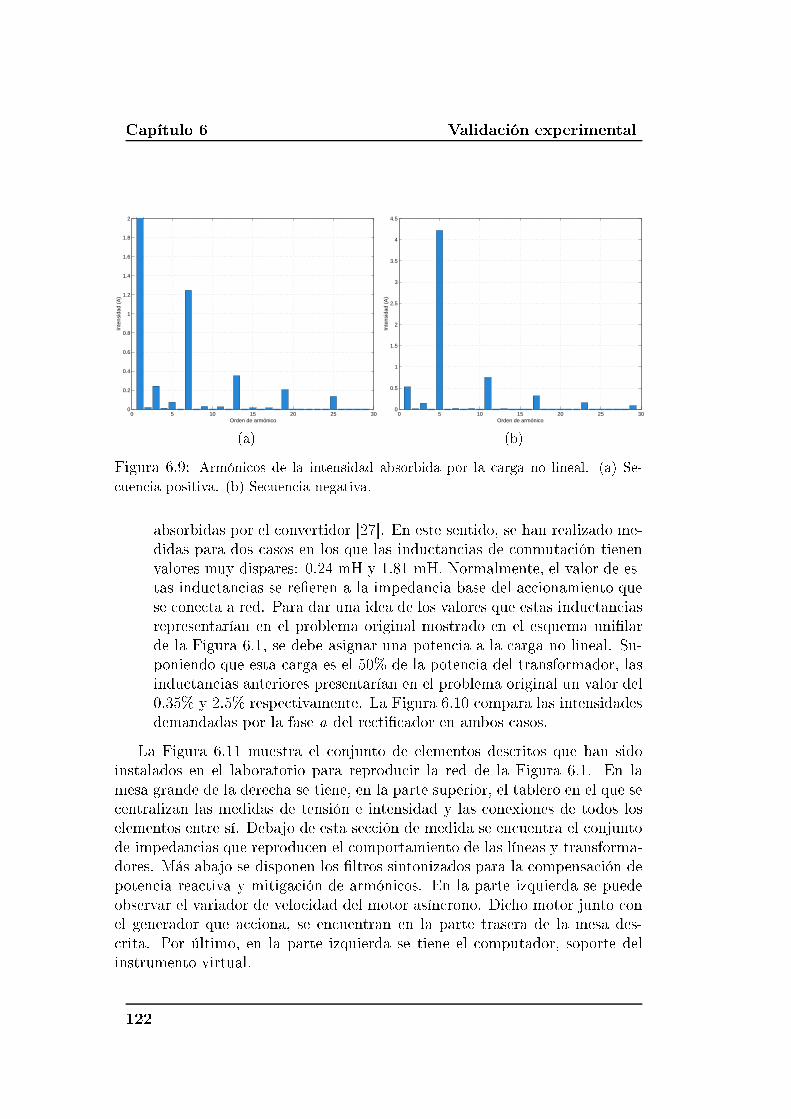
Capítulo 6 Validación experimental
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Orden de armónico
Inte
nsid
ad (
A)
(a)
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Orden de armónico
Inte
nsid
ad (
A)
(b)
Figura 6.9: Armónicos de la intensidad absorbida por la carga no lineal. (a) Se-
cuencia positiva. (b) Secuencia negativa.
absorbidas por el convertidor [27]. En este sentido, se han realizado me-didas para dos casos en los que las inductancias de conmutación tienenvalores muy dispares: 0.24 mH y 1.81 mH. Normalmente, el valor de es-tas inductancias se re�eren a la impedancia base del accionamiento quese conecta a red. Para dar una idea de los valores que estas inductanciasrepresentarían en el problema original mostrado en el esquema uni�larde la Figura 6.1, se debe asignar una potencia a la carga no lineal. Su-poniendo que esta carga es el 50% de la potencia del transformador, lasinductancias anteriores presentarían en el problema original un valor del0.35% y 2.5% respectivamente. La Figura 6.10 compara las intensidadesdemandadas por la fase a del recti�cador en ambos casos.
La Figura 6.11 muestra el conjunto de elementos descritos que han sidoinstalados en el laboratorio para reproducir la red de la Figura 6.1. En lamesa grande de la derecha se tiene, en la parte superior, el tablero en el que secentralizan las medidas de tensión e intensidad y las conexiones de todos loselementos entre sí. Debajo de esta sección de medida se encuentra el conjuntode impedancias que reproducen el comportamiento de las líneas y transforma-dores. Más abajo se disponen los �ltros sintonizados para la compensación depotencia reactiva y mitigación de armónicos. En la parte izquierda se puedeobservar el variador de velocidad del motor asíncrono. Dicho motor junto conel generador que acciona, se encuentran en la parte trasera de la mesa des-crita. Por último, en la parte izquierda se tiene el computador, soporte delinstrumento virtual.
122
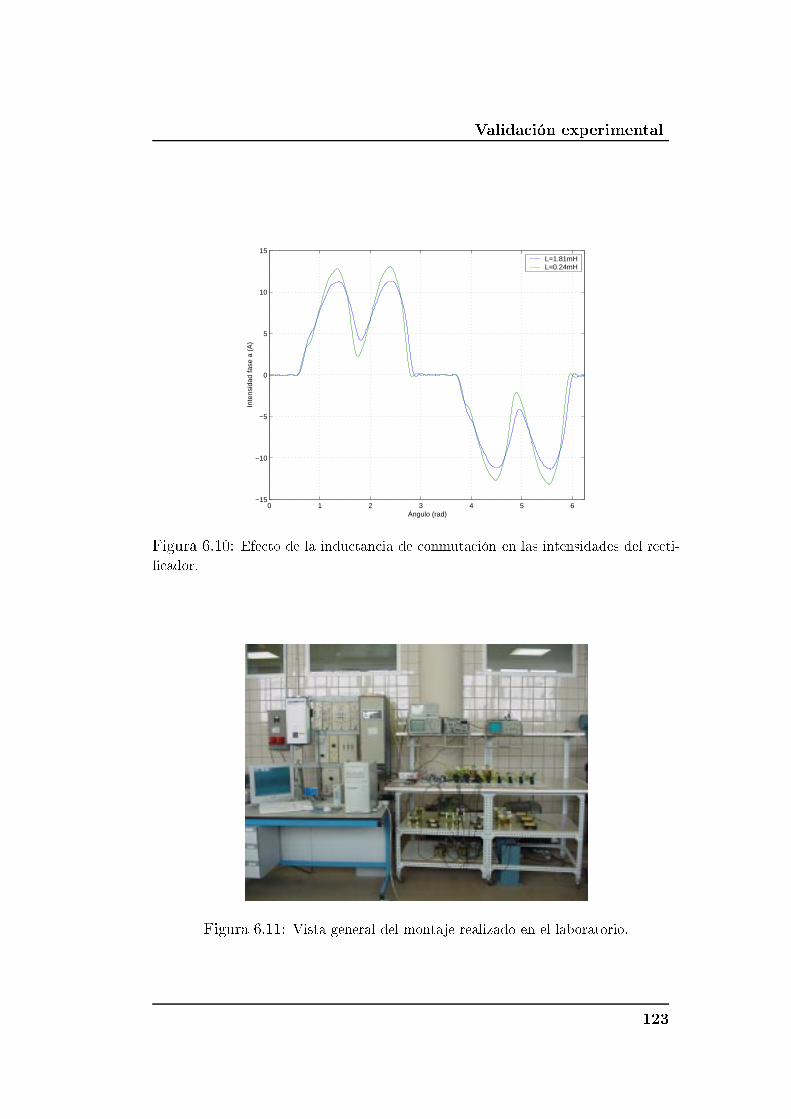
Validación experimental
0 1 2 3 4 5 6−15
−10
−5
0
5
10
15
Ángulo (rad)
Inte
nsid
ad fa
se a
(A
)L=1.81mHL=0.24mH
Figura 6.10: Efecto de la inductancia de conmutación en las intensidades del recti-
�cador.
Figura 6.11: Vista general del montaje realizado en el laboratorio.
123
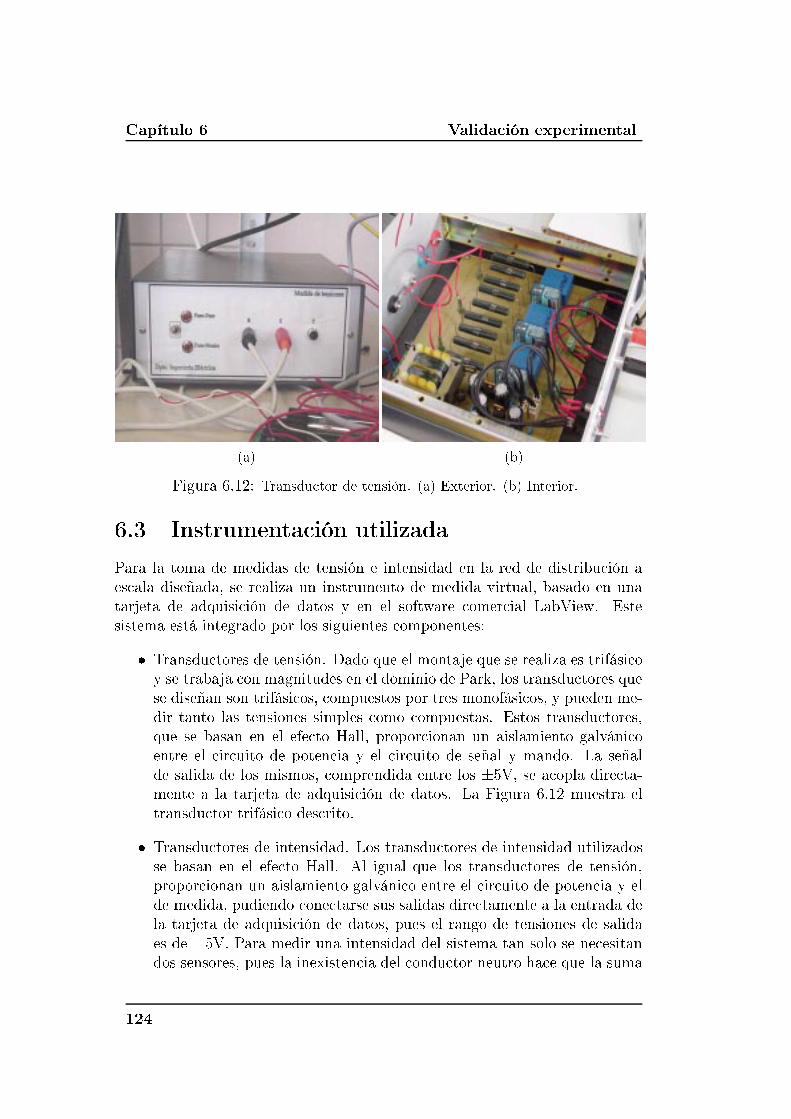
Capítulo 6 Validación experimental
(a) (b)
Figura 6.12: Transductor de tensión. (a) Exterior. (b) Interior.
6.3 Instrumentación utilizada
Para la toma de medidas de tensión e intensidad en la red de distribución aescala diseñada, se realiza un instrumento de medida virtual, basado en unatarjeta de adquisición de datos y en el software comercial LabView. Estesistema está integrado por los siguientes componentes:
� Transductores de tensión. Dado que el montaje que se realiza es trifásicoy se trabaja con magnitudes en el dominio de Park, los transductores quese diseñan son trifásicos, compuestos por tres monofásicos, y pueden me-dir tanto las tensiones simples como compuestas. Estos transductores,que se basan en el efecto Hall, proporcionan un aislamiento galvánicoentre el circuito de potencia y el circuito de señal y mando. La señalde salida de los mismos, comprendida entre los �5V, se acopla directa-mente a la tarjeta de adquisición de datos. La Figura 6.12 muestra eltransductor trifásico descrito.
� Transductores de intensidad. Los transductores de intensidad utilizadosse basan en el efecto Hall. Al igual que los transductores de tensión,proporcionan un aislamiento galvánico entre el circuito de potencia y elde medida, pudiendo conectarse sus salidas directamente a la entrada dela tarjeta de adquisición de datos, pues el rango de tensiones de salidaes de �5V. Para medir una intensidad del sistema tan solo se necesitandos sensores, pues la inexistencia del conductor neutro hace que la suma
124
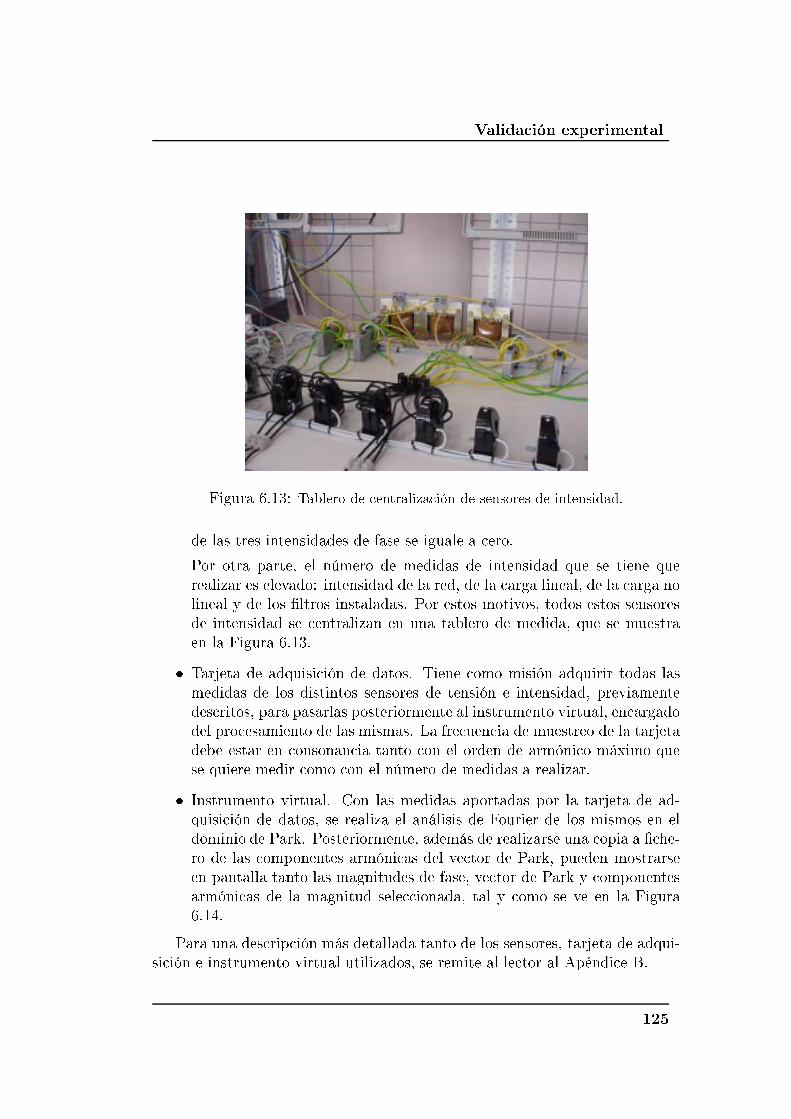
Validación experimental
Figura 6.13: Tablero de centralización de sensores de intensidad.
de las tres intensidades de fase se iguale a cero.
Por otra parte, el número de medidas de intensidad que se tiene querealizar es elevado: intensidad de la red, de la carga lineal, de la carga nolineal y de los �ltros instaladas. Por estos motivos, todos estos sensoresde intensidad se centralizan en una tablero de medida, que se muestraen la Figura 6.13.
� Tarjeta de adquisición de datos. Tiene como misión adquirir todas lasmedidas de los distintos sensores de tensión e intensidad, previamentedescritos, para pasarlas posteriormente al instrumento virtual, encargadodel procesamiento de las mismas. La frecuencia de muestreo de la tarjetadebe estar en consonancia tanto con el orden de armónico máximo quese quiere medir como con el número de medidas a realizar.
� Instrumento virtual. Con las medidas aportadas por la tarjeta de ad-quisición de datos, se realiza el análisis de Fourier de los mismos en eldominio de Park. Posteriormente, además de realizarse una copia a �che-ro de las componentes armónicas del vector de Park, pueden mostrarseen pantalla tanto las magnitudes de fase, vector de Park y componentesarmónicas de la magnitud seleccionada, tal y como se ve en la Figura6.14.
Para una descripción más detallada tanto de los sensores, tarjeta de adqui-sición e instrumento virtual utilizados, se remite al lector al Apéndice B.
125
Capítulo 6 Validación experimental
Figura 6.14: Ventana principal del instrumento virtual.
6.4 Compensación con condensador
En este apartado se estudia la compensación de la potencia reactiva median-te el uso de condensadores. El objetivo que se persigue no es encontrar elcondensador óptimo que maximiza el factor de potencia, sino establecer unacomparación entre resultados experimentales y teóricos, para proceder a lavalidación de estos últimos. Para ello, se instalan en la red propuesta con-densadores de 0.5, 1.5, 2, 2.5 y 3 kVAR, midiéndose la tensión de la fuente,intensidad de la fuente e intensidad de la carga no lineal. En este caso, lacarga no lineal está conectada a la red mediante la inductancia de valor máspequeño, 0.24 mH.
El valor e�caz y la distorsión de la intensidad del sistema para estos con-densadores se encuentran re�ejados en la Tabla 6.4, comparada con los valoresteóricos. Para el cálculo de estos resultados teóricos se ha supuesto, tal y comose ha venido realizando durante el desarrollo de la presente tesis, que la inten-sidad consumida por la carga no lineal permanece constante, pues el modeloutilizado está formado por un conjunto de fuentes de intensidad independientesa las frecuencias a las cuales aparecen los armónicos demandados. La inten-sidad teórica se calcula a través de los valores medidos de dicha intensidad,previa a la instalación de los condensadores, y de las medidas de impedanciade los distintos elementos del sistema.
En la Figura 6.15.(a), se tienen los valores de intensidad después de la com-
126
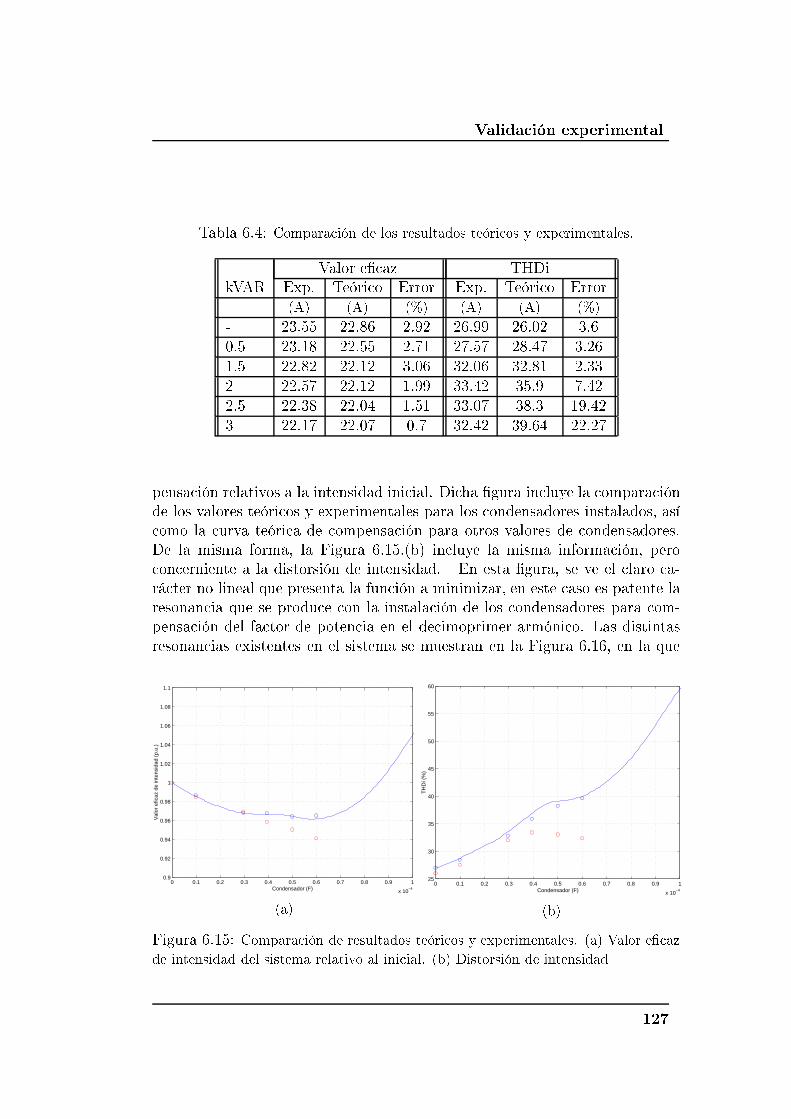
Validación experimental
Tabla 6.4: Comparación de los resultados teóricos y experimentales.
Valor e�caz THDikVAR Exp. Teórico Error Exp. Teórico Error
(A) (A) (%) (A) (A) (%)
- 23.55 22.86 2.92 26.99 26.02 3.60.5 23.18 22.55 2.71 27.57 28.47 3.261.5 22.82 22.12 3.06 32.06 32.81 2.332 22.57 22.12 1.99 33.42 35.9 7.422.5 22.38 22.04 1.51 33.07 38.3 19.423 22.17 22.07 0.7 32.42 39.64 22.27
pensación relativos a la intensidad inicial. Dicha �gura incluye la comparaciónde los valores teóricos y experimentales para los condensadores instalados, asícomo la curva teórica de compensación para otros valores de condensadores.De la misma forma, la Figura 6.15.(b) incluye la misma información, peroconcerniente a la distorsión de intensidad. En esta �gura, se ve el claro ca-rácter no lineal que presenta la función a minimizar, en este caso es patente laresonancia que se produce con la instalación de los condensadores para com-pensación del factor de potencia en el decimoprimer armónico. Las distintasresonancias existentes en el sistema se muestran en la Figura 6.16, en la que
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
x 10−4
0.9
0.92
0.94
0.96
0.98
1
1.02
1.04
1.06
1.08
1.1
Condensador (F)
Val
or e
ficaz
de
inte
nsid
ad (
p.u.
)
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
x 10−4
25
30
35
40
45
50
55
60
Condensador (F)
TH
Di (
%)
(b)
Figura 6.15: Comparación de resultados teóricos y experimentales. (a) Valor e�caz
de intensidad del sistema relativo al inicial. (b) Distorsión de intensidad
127
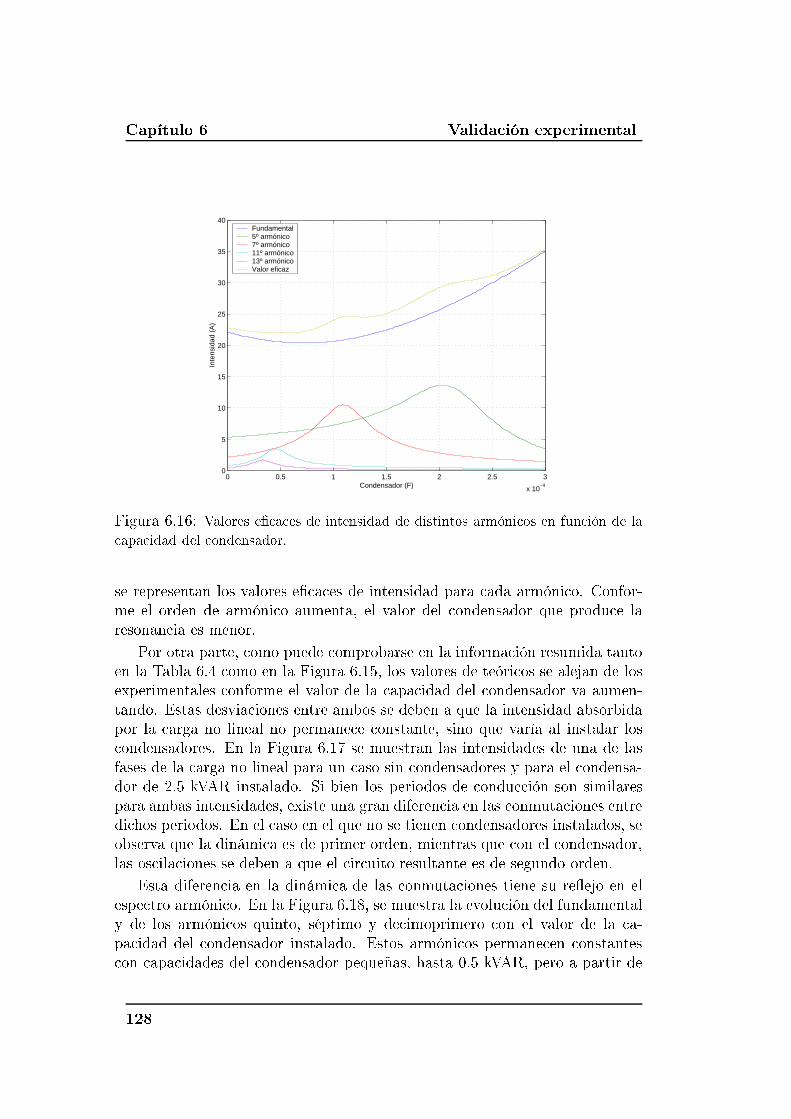
Capítulo 6 Validación experimental
0 0.5 1 1.5 2 2.5 3
x 10−4
0
5
10
15
20
25
30
35
40
Condensador (F)
Inte
nsid
ad (
A)
Fundamental 5º armónico 7º armónico 11º armónico13º armónicoValor eficaz
Figura 6.16: Valores e�caces de intensidad de distintos armónicos en función de la
capacidad del condensador.
se representan los valores e�caces de intensidad para cada armónico. Confor-me el orden de armónico aumenta, el valor del condensador que produce laresonancia es menor.
Por otra parte, como puede comprobarse en la información resumida tantoen la Tabla 6.4 como en la Figura 6.15, los valores de teóricos se alejan de losexperimentales conforme el valor de la capacidad del condensador va aumen-tando. Estas desviaciones entre ambos se deben a que la intensidad absorbidapor la carga no lineal no permanece constante, sino que varía al instalar loscondensadores. En la Figura 6.17 se muestran las intensidades de una de lasfases de la carga no lineal para un caso sin condensadores y para el condensa-dor de 2.5 kVAR instalado. Si bien los periodos de conducción son similarespara ambas intensidades, existe una gran diferencia en las conmutaciones entredichos periodos. En el caso en el que no se tienen condensadores instalados, seobserva que la dinámica es de primer orden, mientras que con el condensador,las oscilaciones se deben a que el circuito resultante es de segundo orden.
Esta diferencia en la dinámica de las conmutaciones tiene su re�ejo en elespectro armónico. En la Figura 6.18, se muestra la evolución del fundamentaly de los armónicos quinto, séptimo y decimoprimero con el valor de la ca-pacidad del condensador instalado. Estos armónicos permanecen constantescon capacidades del condensador pequeñas, hasta 0.5 kVAR, pero a partir de
128

Validación experimental
0 1 2 3 4 5 6−15
−10
−5
0
5
10
15
Ángulo (rad)
Inte
nsid
ad fa
se a
(A
)
(a)
0 1 2 3 4 5 6−15
−10
−5
0
5
10
15
Ángulo (rad)In
tens
idad
fase
a (
A)
(b)
Figura 6.17: Intensidades absorbidas por la fase a de la carga no lineal. (a) Sin
condensadores. (b) 2.5 kVAR de condensadores.
este punto las variaciones son considerables, no sólo en el valor e�caz de losmismos, sino en sus componentes real e imaginaria. Esto provoca las acusadasdiferencias entre los valores teóricos y experimentales mostrados en la Figura6.15.
Por tanto, y a la vista de estos resultados, se hace necesario contemplarlas variaciones de las intensidades consumidas por la carga no lineal, no siendodel todo apropiado el uso de fuentes independientes de intensidad para larepresentación de la carga no lineal [60]. Para ello, se desarrolla un modelo delvariador de velocidad utilizado, que se expone en el Apéndice A. El métodoutilizado para calcular las intensidades después de la compensación teniendoen cuenta las variaciones de intensidad del inversor se describe en la siguientesección.
6.4.1 Interacción red-carga no lineal
La gran diferencia existente entre los resultados teóricos y experimentales sedebe a que la suposición de intensidades constantes en la carga no lineal antesy después de la compensación no es adecuada. Es necesario, por tanto, realizarun modelo de la carga no lineal utilizada. Dicho modelo, que se desarrolla enel Apéndice A, tiene como características principales las que se enumeran acontinuación:
� Se considera que el funcionamiento del variador de velocidad es sin in-terrupciones en la intensidad, tal y como se muestra en la Figura 6.7. En
129
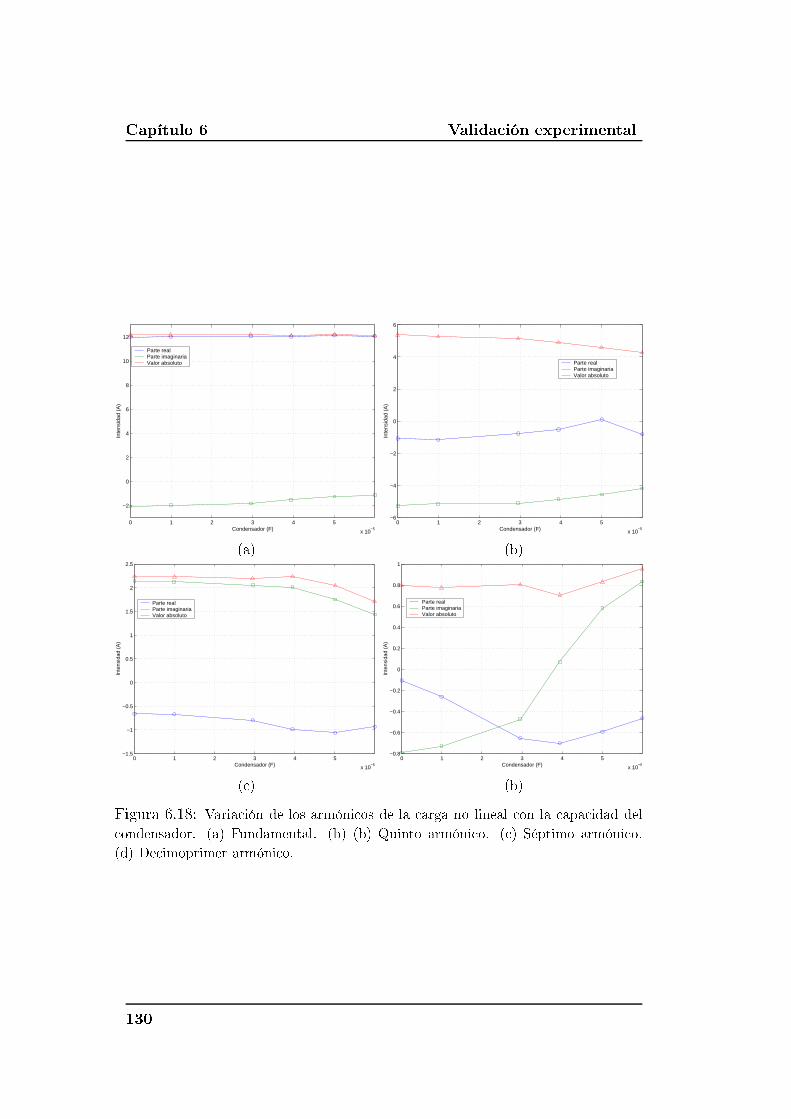
Capítulo 6 Validación experimental
0 1 2 3 4 5
x 10−5
−2
0
2
4
6
8
10
12
Condensador (F)
Inte
nsid
ad (
A)
Parte real Parte imaginariaValor absoluto
(a)
0 1 2 3 4 5
x 10−5
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
Condensador (F)
Inte
nsid
ad (
A)
Parte real Parte imaginariaValor absoluto
(c)
0 1 2 3 4 5
x 10−5
−6
−4
−2
0
2
4
6
Condensador (F)
Inte
nsid
ad (
A)
Parte real Parte imaginariaValor absoluto
(b)
0 1 2 3 4 5
x 10−5
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Condensador (F)
Inte
nsid
ad (
A)
Parte real Parte imaginariaValor absoluto
(b)
Figura 6.18: Variación de los armónicos de la carga no lineal con la capacidad del
condensador. (a) Fundamental. (b) (b) Quinto armónico. (c) Séptimo armónico.
(d) Decimoprimer armónico.
130
Validación experimental
este sentido, en el desarrollo del modelo, además de los periodos de con-ducción o corte de los elementos de potencia del recti�cador de entradadel variador, se tienen que tener en cuenta los periodos de conmutaciónentre los mismos.
� La tensión de alimentación puede presentar desequilibrios y armónicos,si bien estos últimos son sólo de orden impar. La ausencia de armónicosde orden par hace que las semiondas positiva y negativa de la tensiónsean idénticas, lo cual reduce el número de ecuaciones que se tienen queresolver. En este sentido, el modelo mejora otros existentes para conver-tidores alterna/continua con rizado en el lado de continua cuando sonalimentados con tensiones equilibradas [36], [78], [37] al poder tratar de-sequilibrios. Por otra parte, presenta una alternativa a las formulacionesrealizadas para el análisis de armónicos de convertidores alimentados contensiones desequilibradas [12].
Con el modelo desarrollado sólo es posible realizar el estudio de una red forma-da exclusivamente por el convertidor con su inductancia de conmutación, nosiendo viable el análisis de la red de la Figura 6.1, por la presencia de elemen-tos en paralelo con el convertidor en su punto de conexión. Por estos motivos,se hace necesario realizar un análisis de interacción armónica entre la red y elconvertidor o balance de armónicos. Estos métodos dividen a la red en dospartes: lineal y no lineal. Básicamente, consiste en plantear unas funcionesde error, no lineales, que tendrán en cuenta para cada uno de los armónicosconsiderados las diferencias de los cálculos efectuados en ambas redes. Para re-solver el problema es necesario la aplicación de procesos iterativos, no sólo porel carácter no lineal de las funciones de error planteadas, sino para actualizarlos valores de los armónicos inyectados por la carga no lineal. Descripcionesdetalladas de este problema con diferentes aplicaciones pueden encontrarse en[86], [36], [78] y [79].
El modelo de la carga no lineal desarrollado en el Apéndice A permite ob-tener los armónicos de intensidad de dicha carga. Estos armónicos son funciónde los armónicos de tensión existentes en el punto de conexión y de la tensióndel enlace de continua, o lo que es lo mismo, de la potencia que absorbe el va-riador de velocidad. De esta forma, la carga no lineal puede ser representadapor una conjunto de intensidades armónicas dependientes de las tensiones:
Ik = f(U1; : : : ; Un; Udc) (6.4)
La parte lineal de la red se representa por el equivalente Thevenin de lamisma en el punto de conexión de la carga no lineal. Para que exista un
131

Capítulo 6 Validación experimental
balance de armónicos entre las partes lineal y no lineal, se tiene que cumplirla ecuación de balance para cada armónico [36]. Expresando dicha ecuaciónen el dominio de Park:
U lk = UThk �Z lkIk(U1; : : : ; Un; Udc) (6.5)
A partir de la ecuación (6.5) pueden de�nirse las funciones de error, que ten-drán que anularse una vez alcanzado el equilibrio. Por cada armónico, setendrán dos incógnitas, módulo y argumento de la tensión armónica, y dosfunciones de error correspondientes a la parte real e imaginaria:
Frk = Ulkr � UThkr +RlkIkr �XlkIkx (6.6)
Fxk = Ulkx � UThkx +RlkIkx +XlkIkr (6.7)
Aplicando el algoritmo de Newton-Raphson a (6.6) y (6.7), se obtiene el si-guiente sistema a resolver de forma iterativa:"
@Frk@Uk
@Frk@�k
@Fxk@Uk
@Fxk@�k
# ��Uk
��k
�= �
�FrkFxk
�(6.8)
Los términos del jacobiano de (6.8) son función tanto de las tensiones como delas derivadas de la intensidad de Park de la carga no lineal:
@Frk@Uh
= (cos�k) +RlkRe
�@Ik@Uh
��XlkIm
�@Ik@Uh
�(6.9)
@Fxk@Uh
= (sin�k) +RlkIm
�@Ik@Uh
�+XlkRe
�@Ik@Uh
�(6.10)
@Frk@�h
= (�Uksen�k) +RlkRe
�@Ik@�h
��XlkIm
�@Ik@�h
�(6.11)
@Fxk@Uh
= (Uk cos�k) +RlkIm
�@Ik@�h
�+XlkRe
�@Ik@�h
�(6.12)
Los primeros sumandos de las ecuaciones anteriores aparecen sólo en el casoen el que k = h. Por otra parte, las derivadas de los armónicos de intensidadrespecto al módulo y fase de las tensiones de alimentación de la carga no lineal,se especi�can en el Apéndice A.
En cada una de las iteraciones realizadas para resolver las ecuaciones (6.8),al existir una variación de las tensiones en bornas de la carga no lineal, esnecesario volver a calcular los armónicos de intensidad mediante la aplicacióndel modelo desarrollado.
132
Validación experimental
Si se aplica este proceso para calcular las intensidades que demanda el in-versor en el caso de la instalación de condensadores para compensar el factor depotencia, se obtienen los resultados que se muestran en la Figura 6.19. En ellase compara el valor teórico y experimental de las intensidades del recti�cadorpara la fase b. Se ha elegido esta fase, porque se puede comprobar claramen-te el desequilibrio existente en las tensiones, que se mani�esta en la diferenteamplitud de los dos pulsos por semiperiodo de la intensidad absorbida. Parael cálculo teórico de estas intensidades se han tenido en cuenta los armónicospredominantes:
� Secuencia positiva: fundamental, tercero, séptimo, decimotercero, deci-monoveno y vigesimoquinto.
� Secuencia negativa: fundamental, tercero, quinto, decimoprimero, deci-motercero, vigesimotercero, vigesimonoveno.
Comparando los resultados teóricos y experimentales en el dominio de lafrecuencia, se obtiene la Figura 6.20. En ella se compara el valor e�caz y laparte imaginaria de los armónicos más relevantes respecto a la tensión existenteen bornas de la carga no lineal frente al condensador instalado.
Calculando con estos valores de intensidad de la carga no lineal la intensi-dad que circula por la línea de alimentación, se obtienen los resultados teóricospara el valor e�caz y distorsión de intensidad que se comparan con los expe-rimentales en la Tabla 6.5 y la Figura 6.21. Al igual que en la Figura 6.15,se representa el valor e�caz de la intensidad respecto al existente antes de lacompensación y el valor de distorsión de intensidad expresado porcentualmen-te.
La similitud existente entre los resultados teóricos, calculados a partir delmodelo del convertidor y la resolución de la interacción armónica existenteentre éste y la red, y experimentales es patente. Esta concordancia no sólose muestra en la representación temporal de las intensidades, Figura 6.19, ylos armónicos en el dominio de Park, Figura 6.20, sino también en los resul-tados globales de la compensación de la Tabla 6.5. Estos resultados ponende mani�esto que las variaciones de intensidad deben tenerse en cuenta. Noobstante, el caso propuesto es, en cierta medida, extremo, pues el valor de lainductancia de conmutación es extremadamente pequeño. Con inductanciasde conmutación mayores, si bien siguen existiendo diferencias en las inten-sidades absorbidas por la carga no lineal cuando se insertan condensadores,éstas no son tan acusadas, debido al efecto de alisado de intensidad que dichasinductancias consiguen.
133
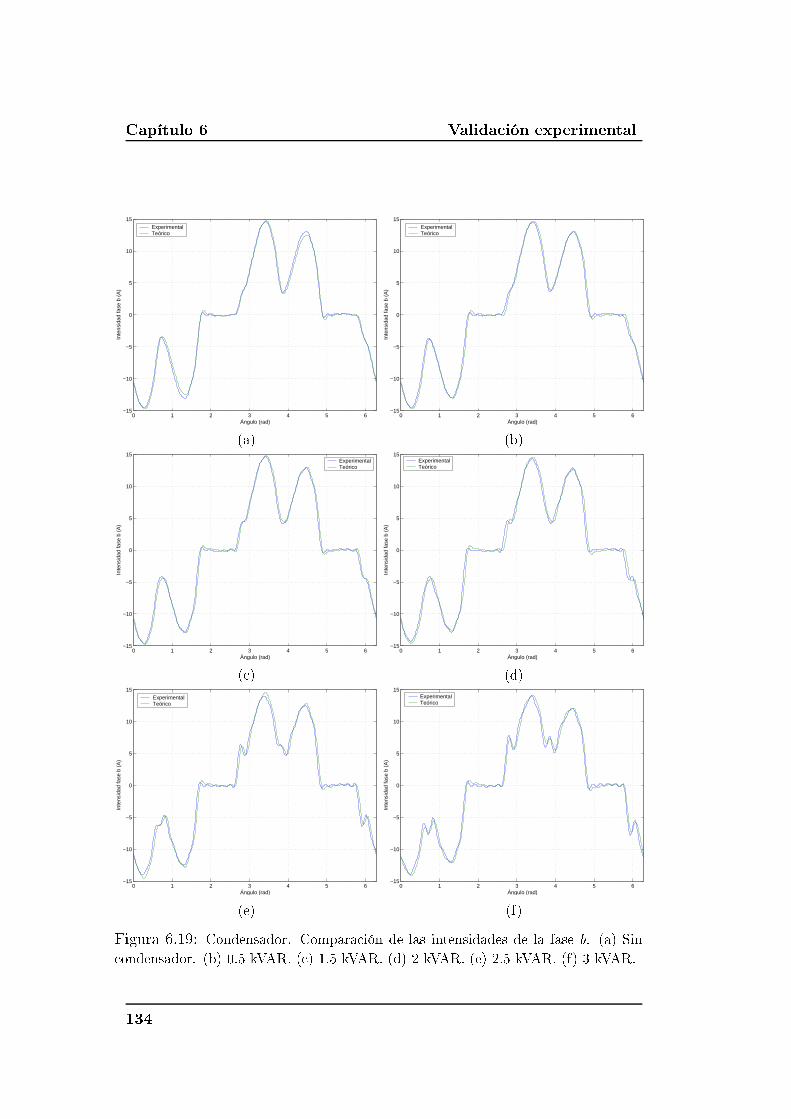
Capítulo 6 Validación experimental
0 1 2 3 4 5 6−15
−10
−5
0
5
10
15
Ángulo (rad)
Inte
nsid
ad fa
se b
(A
)
ExperimentalTeórico
(a)
0 1 2 3 4 5 6−15
−10
−5
0
5
10
15
Ángulo (rad)
Inte
nsid
ad fa
se b
(A
)
ExperimentalTeórico
(c)
0 1 2 3 4 5 6−15
−10
−5
0
5
10
15
Ángulo (rad)
Inte
nsid
ad fa
se b
(A
)
ExperimentalTeórico
(e)
0 1 2 3 4 5 6−15
−10
−5
0
5
10
15
Ángulo (rad)
Inte
nsid
ad fa
se b
(A
)
ExperimentalTeórico
(b)
0 1 2 3 4 5 6−15
−10
−5
0
5
10
15
Ángulo (rad)
Inte
nsid
ad fa
se b
(A
)
ExperimentalTeórico
(d)
0 1 2 3 4 5 6−15
−10
−5
0
5
10
15
Ángulo (rad)
Inte
nsid
ad fa
se b
(A
)
ExperimentalTeórico
(f)
Figura 6.19: Condensador. Comparación de las intensidades de la fase b. (a) Sin
condensador. (b) 0.5 kVAR. (c) 1.5 kVAR. (d) 2 kVAR. (e) 2.5 kVAR. (f) 3 kVAR.
134
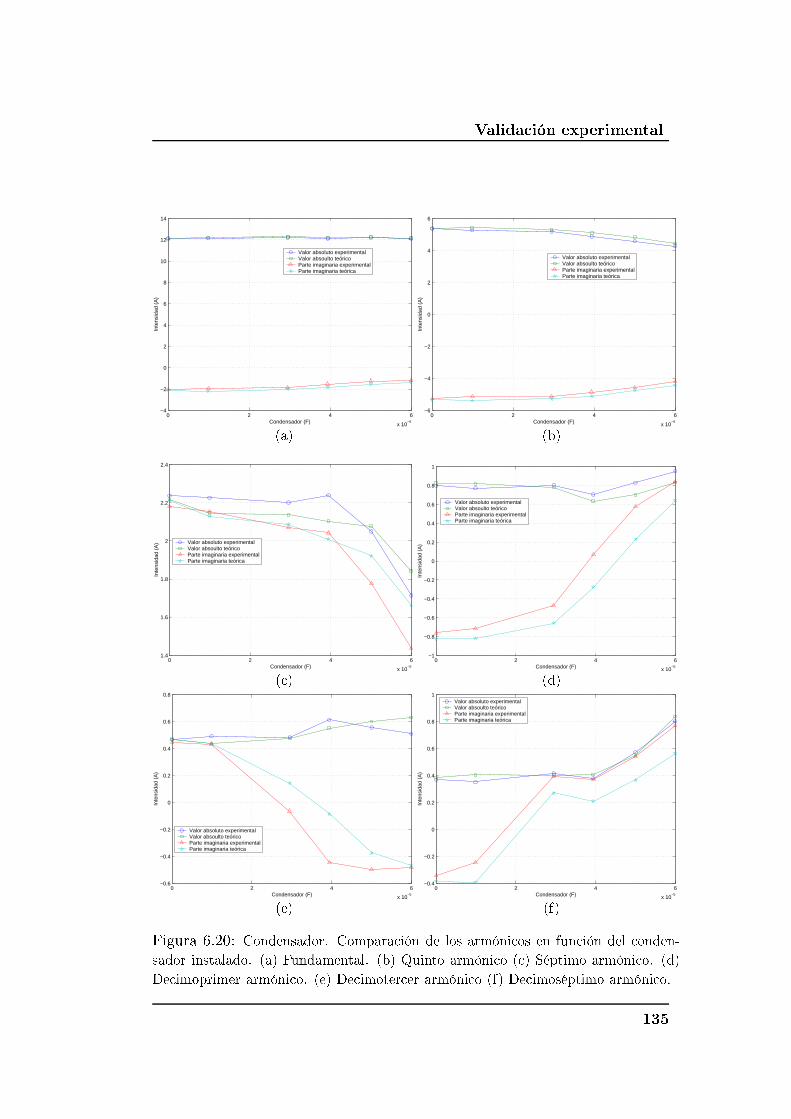
Validación experimental
0 2 4 6
x 10−5
−4
−2
0
2
4
6
8
10
12
14
Condensador (F)
Inte
nsid
ad (
A)
Valor absoluto experimental Valor absoulto teórico Parte imaginaria experimentalParte imaginaria teórica
0 2 4 6
x 10−5
−6
−4
−2
0
2
4
6
Condensador (F)In
tens
idad
(A
)
Valor absoluto experimental Valor absoulto teórico Parte imaginaria experimentalParte imaginaria teórica
(a) (b)
0 2 4 6
x 10−5
1.4
1.6
1.8
2
2.2
2.4
Condensador (F)
Inte
nsid
ad (
A) Valor absoluto experimental
Valor absoulto teórico Parte imaginaria experimentalParte imaginaria teórica
0 2 4 6
x 10−5
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Condensador (F)
Inte
nsid
ad (
A)
Valor absoluto experimental Valor absoulto teórico Parte imaginaria experimentalParte imaginaria teórica
(c) (d)
0 2 4 6
x 10−5
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Condensador (F)
Inte
nsid
ad (
A)
Valor absoluto experimental Valor absoulto teórico Parte imaginaria experimentalParte imaginaria teórica
0 2 4 6
x 10−5
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Condensador (F)
Inte
nsid
ad (
A)
Valor absoluto experimental Valor absoulto teórico Parte imaginaria experimentalParte imaginaria teórica
(e) (f)
Figura 6.20: Condensador. Comparación de los armónicos en función del conden-
sador instalado. (a) Fundamental. (b) Quinto armónico (c) Séptimo armónico. (d)
Decimoprimer armónico. (e) Decimotercer armónico (f) Decimoséptimo armónico.
135
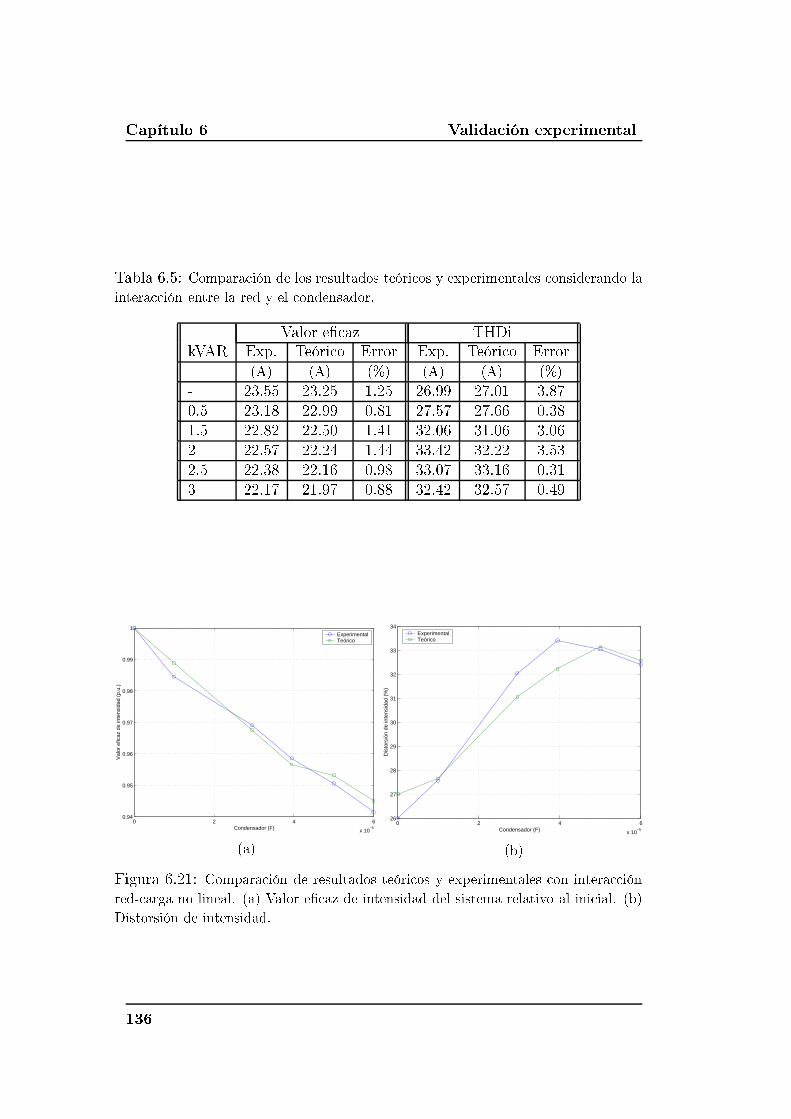
Capítulo 6 Validación experimental
Tabla 6.5: Comparación de los resultados teóricos y experimentales considerando la
interacción entre la red y el condensador.
Valor e�caz THDikVAR Exp. Teórico Error Exp. Teórico Error
(A) (A) (%) (A) (A) (%)
- 23.55 23.25 1.25 26.99 27.01 3.870.5 23.18 22.99 0.81 27.57 27.66 0.381.5 22.82 22.50 1.41 32.06 31.06 3.062 22.57 22.24 1.44 33.42 32.22 3.532.5 22.38 22.16 0.98 33.07 33.16 0.313 22.17 21.97 0.88 32.42 32.57 0.49
0 2 4 6
x 10−5
0.94
0.95
0.96
0.97
0.98
0.99
1
Condensador (F)
Val
or e
ficaz
de
inte
nsid
ad (
p.u.
)
ExperimentalTeórico
(a)
0 2 4 6
x 10−5
26
27
28
29
30
31
32
33
34
Condensador (F)
Dis
tors
ión
de in
tens
idad
(%
)
ExperimentalTeórico
(b)
Figura 6.21: Comparación de resultados teóricos y experimentales con interacción
red-carga no lineal. (a) Valor e�caz de intensidad del sistema relativo al inicial. (b)
Distorsión de intensidad.
136
Validación experimental
6.5 Compensación con banco de �ltros sintoni-zados
En esta sección se procede a realizar el estudio, para el ejemplo propuesto, de lacompensación de reactiva y mitigación de armónicos mediante la instalación de�ltros pasivos sintonizados. Las condiciones de funcionamiento son idénticasal caso de compensación con condensador, variando únicamente el valor de lareactancia de conmutación que, para este caso, es de 1.81 mH.
6.5.1 Optimización del banco de �ltros
El problema se plantea de la forma especi�cada en el Capítulo 4: dadas unasfrecuencias de sintonización de los �ltros pasivos, y en función de los armóni-cos existentes en la tensión del sistema e intensidad de la carga no lineal, seobtienen las regiones factibles, delimitadas por los hiperplanos de resonancia,en las que se tiene que encontrar un mínimo local. Comparando los mínimoslocales de las distintas regiones factibles se obtienen los valores de los elemen-tos que componen el banco óptimo para la situación especi�cada. Además delas restricciones introducidas por las resonancias, se añaden al problema lasrestricciones adicionales de�nidas en el Capítulo 4, para tener en cuenta queel conjunto formado por la carga y el compensador no deben ceder potenciareactiva a la red y, por otra parte, dejar una distancia prudencial entre losmínimos y los máximos que aparecen en la impedancia equivalente vista desdeel punto de conexión de los �ltros. En este sentido, hay que tener en cuentaque una mayor exigencia en este último aspecto, es decir, separaciones elevadasentre máximos y mínimos, conlleva una compensación más pobre de potenciareactiva, por lo cual hay que llegar a una solución de compromiso. Tomandocomo base las posibles reducciones de la capacidad de los condensadores, talcomo se vio en el Capítulo 4, se toman como valores límite para la situaciónde los máximos de la impedancia, klim, los armónicos situados 0.5 órdenes pordebajo de la frecuencia de sintonización de los �ltros, kh:
klim = kh � 0:5 (6.13)
Tras realizar una medida de las tensiones de red e intensidades de la cargano lineal y calcular los armónicos de los vectores de Park asociados, que semuestran en las tablas 6.6 y 6.7 respectivamente, se procede al diseño del �ltropasivo. En el proceso de optimización no han sido tenidos en cuenta todoslos armónicos que se extraen del proceso de medida, tan solo los más relevan-
137
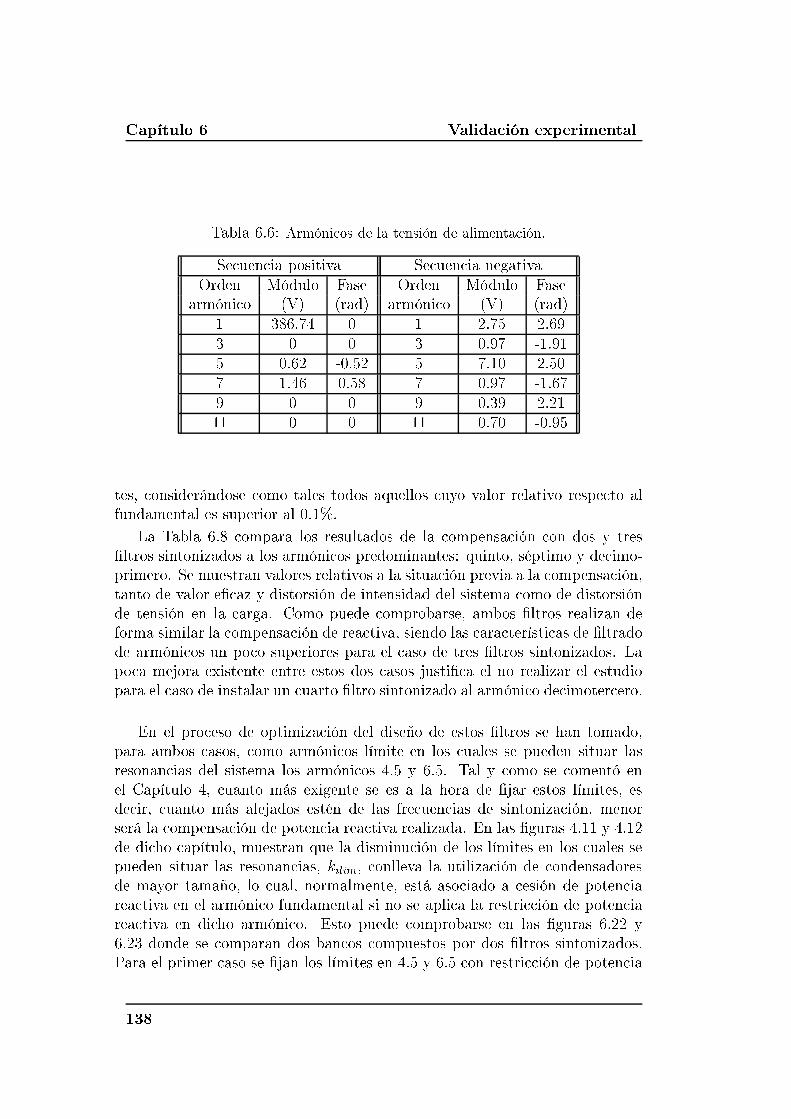
Capítulo 6 Validación experimental
Tabla 6.6: Armónicos de la tensión de alimentación.
Secuencia positiva Secuencia negativaOrden Módulo Fase Orden Módulo Fase
armónico (V) (rad) armónico (V) (rad)1 386.74 0 1 2.75 2.693 0 0 3 0.97 -1.915 0.62 -0.52 5 7.10 2.507 1.46 0.58 7 0.97 -1.679 0 0 9 0.39 2.2111 0 0 11 0.70 -0.95
tes, considerándose como tales todos aquellos cuyo valor relativo respecto alfundamental es superior al 0.1%.
La Tabla 6.8 compara los resultados de la compensación con dos y tres�ltros sintonizados a los armónicos predominantes: quinto, séptimo y decimo-primero. Se muestran valores relativos a la situación previa a la compensación,tanto de valor e�caz y distorsión de intensidad del sistema como de distorsiónde tensión en la carga. Como puede comprobarse, ambos �ltros realizan deforma similar la compensación de reactiva, siendo las características de �ltradode armónicos un poco superiores para el caso de tres �ltros sintonizados. Lapoca mejora existente entre estos dos casos justi�ca el no realizar el estudiopara el caso de instalar un cuarto �ltro sintonizado al armónico decimotercero.
En el proceso de optimización del diseño de estos �ltros se han tomado,para ambos casos, como armónicos límite en los cuales se pueden situar lasresonancias del sistema los armónicos 4.5 y 6.5. Tal y como se comentó enel Capítulo 4, cuanto más exigente se es a la hora de �jar estos límites, esdecir, cuanto más alejados estén de las frecuencias de sintonización, menorserá la compensación de potencia reactiva realizada. En las �guras 4.11 y 4.12de dicho capítulo, muestran que la disminución de los límites en los cuales sepueden situar las resonancias, kilim, conlleva la utilización de condensadoresde mayor tamaño, lo cual, normalmente, está asociado a cesión de potenciareactiva en el armónico fundamental si no se aplica la restricción de potenciareactiva en dicho armónico. Esto puede comprobarse en las �guras 6.22 y6.23 donde se comparan dos bancos compuestos por dos �ltros sintonizados.Para el primer caso se �jan los límites en 4.5 y 6.5 con restricción de potencia
138

Validación experimental
Tabla 6.7: Armónicos de la intensidad de la carga no lineal.
Secuencia positiva Secuencia negativaOrden Módulo Fase Orden Módulo Fase
armónico (V) (rad) armónico (V) (rad)1 11.79 -0.21 1 0.53 -2.672 0.02 -0.91 2 0.01 -0.713 0.24 2.34 3 0.15 0.734 0.01 -0.79 4 0 05 0.08 -1.76 5 4.22 -1.937 1.25 0.68 7 0.02 0.499 0.03 -0.05 9 0.02 1.5711 0.03 2.57 11 0.75 -1.2313 0.35 -1.06 13 0.02 -0.8915 0.01 -0.89 15 0 017 0.01 1.42 17 0.31 -0.2719 0.2 -2.45 19 0 023 0 0 23 0.16 0.8925 0.14 2.63 25 0 029 0 0 29 0.08 2.19
reactiva en el fundamental y para el segundo caso en 4.2 y 6.2 sin restricción depotencia reactiva. En el primer caso sólo existe una región factible, y el óptimose encuentra situado en la intersección de las barreras de las restricciones decompensación de reactiva en el fundamental y en el límite 4.5. Para el segundocaso, en el que se disminuyen los límites a 4.2 y 6.2 respectivamente, y no seconsidera la restricción de compensación de reactiva, se tienen cuatro zonasfactibles, mostrándose los óptimos locales de tres de ellas. En este caso, elóptimo absoluto es el que se encuentra en la intersección de las restriccionesde las dos resonancias �cticias. Sin embargo, se puede comprobar cómo dichoóptimo está situado en la zona positiva de la restricción de potencia reactiva enel armónico fundamental. Esto quiere decir que si dicha restricción se hubieraincluido en la resolución de las ecuaciones, no habría existido ninguna zonafactible.
Además de los resultados de la Tabla 6.8, las �guras 6.24 a 6.27 muestranlas ganancias, ya expuestas en el Capítulo 3 por (3.112), (3.113) y (3.114), quede�nen el comportamiento del �ltro en frecuencia. A partir de estas �guras,
139

Capítulo 6 Validación experimental
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10−4
0
0.5
1
1.5
2
2.5
3
3.5
4x 10
−4
C7 (F)
C5
(F)
Resonancia 2º armónico
Resonancia 4º armónico
Resonanciaficticia 4.5º armónico
Reactivafundamental
Resonanciaficticia 6.5º armónico
Figura 6.22: Representación de las restricciones con límites 4.5 y 6.5.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10−4
0
0.5
1
1.5
2
2.5
3
3.5
4x 10
−4
C7 (F)
C5
(F)
Resonancia 2º armónico
Resonancia 4º armónico
Resonanciaficticia 6.2º armónico
Resonanciaficticia 4.2º armónico
Reactivafundamental
Figura 6.23: Representación de las restricciones con límites 4.2 y 6.2.
140
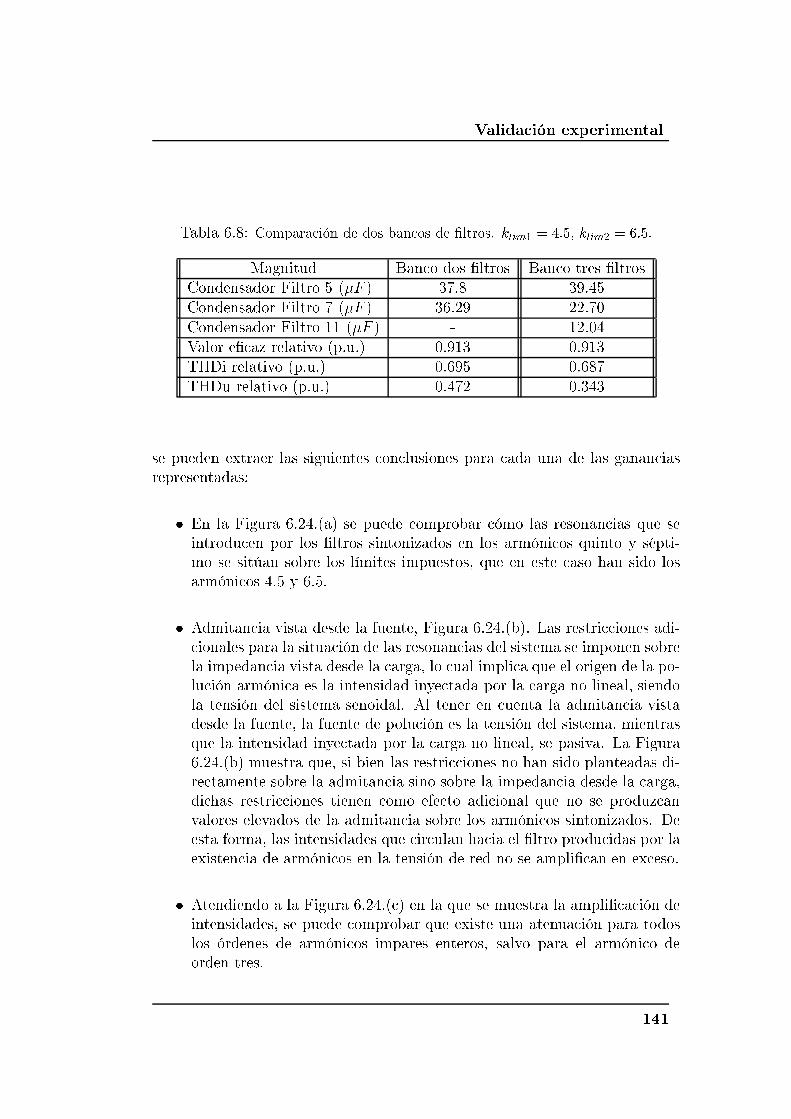
Validación experimental
Tabla 6.8: Comparación de dos bancos de �ltros. klim1 = 4:5, klim2 = 6:5.
Magnitud Banco dos �ltros Banco tres �ltrosCondensador Filtro 5 (�F ) 37.8 39.45Condensador Filtro 7 (�F ) 36.29 22.70Condensador Filtro 11 (�F ) - 12.04Valor e�caz relativo (p.u.) 0.913 0.913THDi relativo (p.u.) 0.695 0.687THDu relativo (p.u.) 0.472 0.343
se pueden extraer las siguientes conclusiones para cada una de las gananciasrepresentadas:
� En la Figura 6.24.(a) se puede comprobar cómo las resonancias que seintroducen por los �ltros sintonizados en los armónicos quinto y sépti-mo se sitúan sobre los límites impuestos, que en este caso han sido losarmónicos 4.5 y 6.5.
� Admitancia vista desde la fuente, Figura 6.24.(b). Las restricciones adi-cionales para la situación de las resonancias del sistema se imponen sobrela impedancia vista desde la carga, lo cual implica que el origen de la po-lución armónica es la intensidad inyectada por la carga no lineal, siendola tensión del sistema senoidal. Al tener en cuenta la admitancia vistadesde la fuente, la fuente de polución es la tensión del sistema, mientrasque la intensidad inyectada por la carga no lineal, se pasiva. La Figura6.24.(b) muestra que, si bien las restricciones no han sido planteadas di-rectamente sobre la admitancia sino sobre la impedancia desde la carga,dichas restricciones tienen como efecto adicional que no se produzcanvalores elevados de la admitancia sobre los armónicos sintonizados. Deesta forma, las intensidades que circulan hacia el �ltro producidas por laexistencia de armónicos en la tensión de red no se ampli�can en exceso.
� Atendiendo a la Figura 6.24.(c) en la que se muestra la ampli�cación deintensidades, se puede comprobar que existe una atenuación para todoslos órdenes de armónicos impares enteros, salvo para el armónico deorden tres.
141
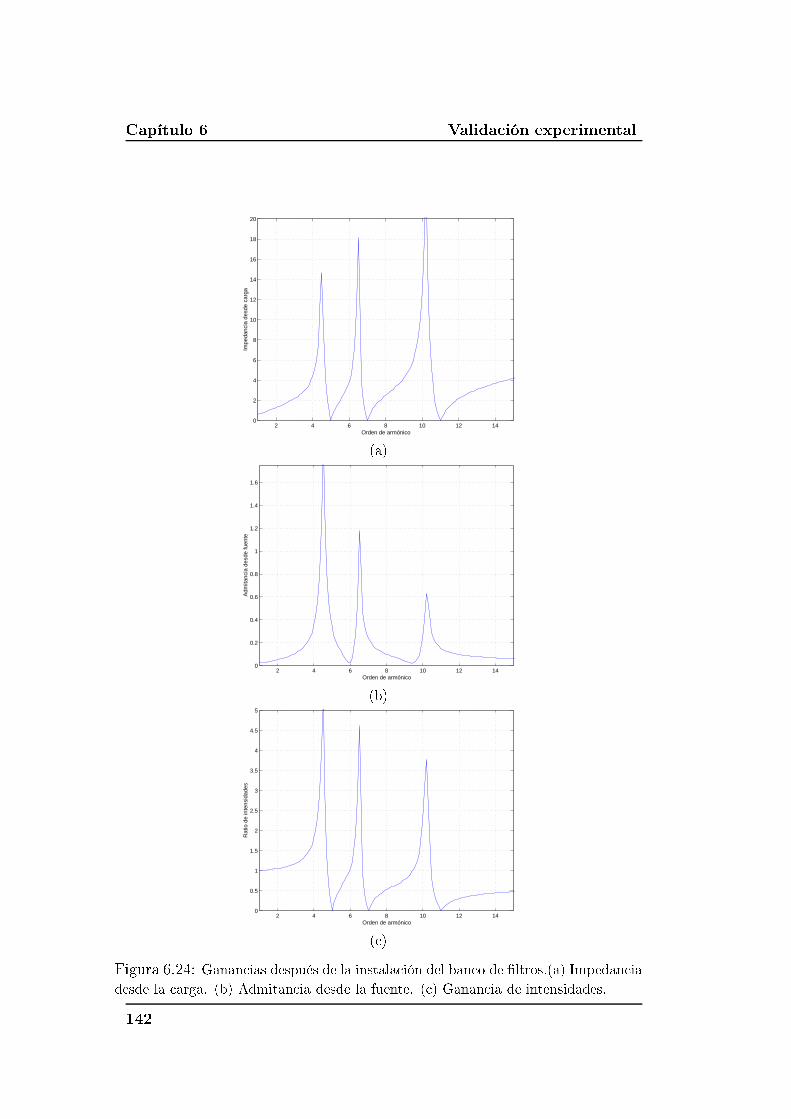
Capítulo 6 Validación experimental
2 4 6 8 10 12 140
2
4
6
8
10
12
14
16
18
20
Orden de armónico
Impe
danc
ia d
esde
car
ga
(a)
2 4 6 8 10 12 140
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Orden de armónico
Adm
itanc
ia d
esde
fuen
te
(b)
2 4 6 8 10 12 140
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Orden de armónico
Rat
io d
e in
tens
idad
es
(c)
Figura 6.24: Ganancias después de la instalación del banco de �ltros.(a) Impedancia
desde la carga. (b) Admitancia desde la fuente. (c) Ganancia de intensidades.
142

Validación experimental
Tabla 6.9: Dimensionado previo de los �ltros pasivos.
Armónico Bobina Condensadorsintonizado L (mH) I (A) C (�F ) U (V)
5 10.27 8 39.45 4007 9.11 5 22.70 40011 7.61 3 12.04 400
6.5.2 Dimensionado de los componentes del �ltro
A la vista de los resultados del proceso de optimización mostrados en la Tabla6.8, se decide instalar un banco formado por �ltros sintonizados al quinto,séptimo y decimoprimer armónicos. En esta sección se calculan los distintoselementos del �ltro: bobinas y condensadores.
A partir de la frecuencia de sintonización y el valor de la capacidad del�ltro se pueden calcular las inductancias de las bobinas. Estas inductanciastienen que estar diseñadas para la intensidad que absorbe cada rama del �ltro.Dicha intensidad se calcula a partir de la tensión en el punto de conexión yde la impedancia de cada uno de los �ltros. Esta intensidad se incrementa un50% respecto a su valor original para evitar posibles sobrecargas de las bobinasante cambios de las condiciones de funcionamiento.
Los condensadores se especi�can mediante su capacidad y la tensión nomi-nal de diseño. La tensión que deben soportar los condensadores es sensible-mente superior a la existente en bornas del �ltro. Dicha tensión se calcula porla expresión:
U2c =
Xk 6=kh
�Uk
(k=kh)2 � 1
�2
(6.14)
siendo Uc el valor de tensión e�caz de diseño del condensador, Uk el valor e�cazde la tensión en bornas del �ltro para el armónico k-esimo y kh el armónicoen el cual el �ltro está sintonizado.
Con estas consideraciones, las especi�caciones de los componentes de cadauno de los �ltros es la re�ejada en la Tabla 6.9. Sin embargo, la construcción deestos �ltros tiene que realizarse a partir de componentes pasivos disponibles enel mercado. El proceso que se sigue para formar el banco de �ltros es realizarla batería de condensadores a partir de asociaciones serie-paralelo que consiganvalores aproximados a los dados en la Tabla 6.9, para posteriormente realizaruna bobina con el valor adecuado que satisfaga la frecuencia de sintonización.
143
Capítulo 6 Validación experimental
Figura 6.25: Filtros pasivos instalados.
Tabla 6.10: Dimensionado �nal de los �ltros pasivos.
Armónico Bobina Condensadorsintonizado L (mH) I (A) C (�F ) U (V)
5 10.00 9 40.50 4007 8.85 6 23.3 40011 8.05 3 10.38 400
De esta manera, los valores de los componentes de los �ltros que se instalan,mostrados en la Figura 6.25, son los recogidos en la Tabla 6.10.
En la Figura 6.26 se muestra la comparación de los valores teóricos y experi-mentales de la impedancia de cada uno de los �ltros sintonizados componentesdel banco. Se puede observar como el �ltro del quinto armónico y séptimoarmónico están bien sintonizados, al presentar baja impedancia a la frecuen-cia de sintonización, mientras que el �ltro del decimoprimer armónico estádesintonizado.
En la Tabla 6.11 se muestran los valores de impedancia de los �ltros enfunción de la frecuencia y la secuencia. Estos valores de impedancia han sidoobtenidos mediante la medida de la intensidad absorbida por cada �ltro y latensión existente en sus bornas. En este sentido, dichos valores están supedi-tados a la existencia de armónicos de intensidad a las frecuencias deseadas.
144
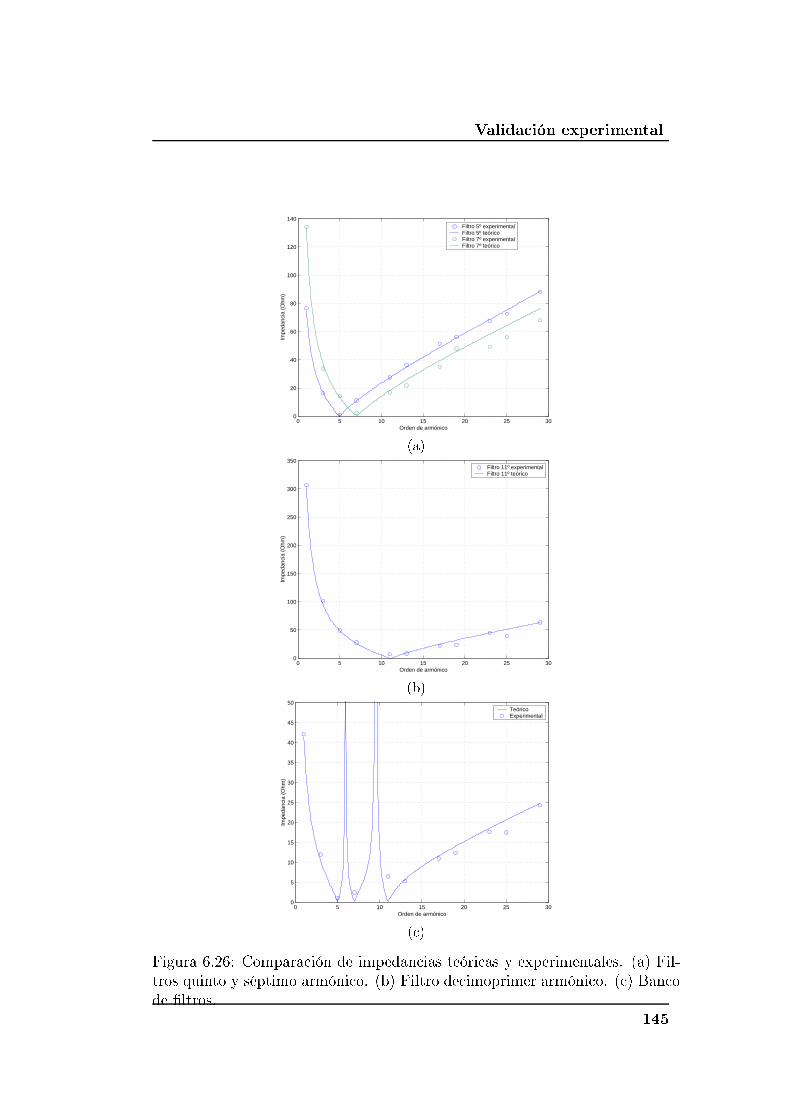
Validación experimental
0 5 10 15 20 25 300
20
40
60
80
100
120
140
Orden de armónico
Impe
danc
ia (
Ohm
)
Filtro 5º experimentalFiltro 5º teórico Filtro 7º experimentalFiltro 7º teórico
(a)
0 5 10 15 20 25 300
50
100
150
200
250
300
350
Orden de armónico
Impe
danc
ia (
Ohm
)
Filtro 11º experimentalFiltro 11º teórico
(b)
0 5 10 15 20 25 300
5
10
15
20
25
30
35
40
45
50
Orden de armónico
Impe
danc
ia (
Ohm
)
Teórico Experimental
(c)
Figura 6.26: Comparación de impedancias teóricas y experimentales. (a) Fil-tros quinto y séptimo armónico. (b) Filtro decimoprimer armónico. (c) Bancode �ltros.
145
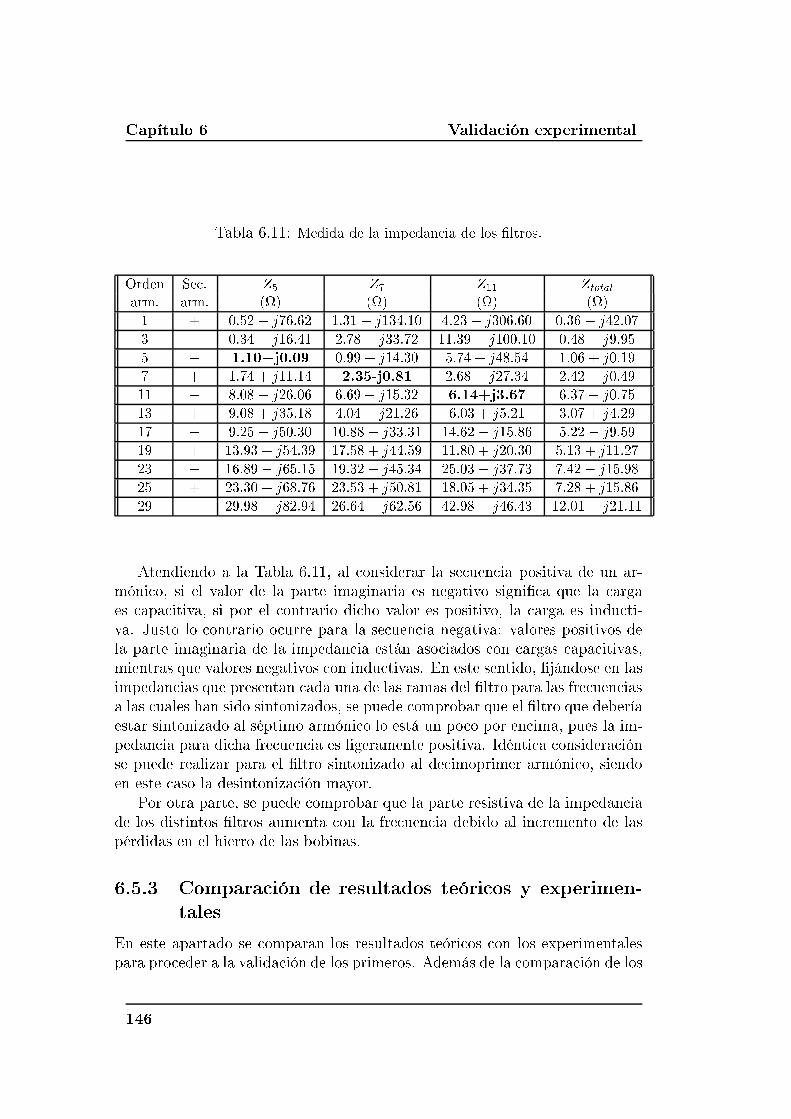
Capítulo 6 Validación experimental
Tabla 6.11: Medida de la impedancia de los �ltros.
Orden Sec. Z5 Z7 Z11 Ztotal
arm. arm. () () () ()
1 + 0:52 � j76:62 1:31 � j134:10 4:23 � j306:60 0:36 � j42:07
3 � 0:34 � j16:41 2:78 � j33:72 11:39 � j100:10 0:48 � j9:95
5 � 1.10+j0.09 0:99 + j14:30 5:74 + j48:54 1:06 + j0:19
7 + 1:74 + j11:14 2.35-j0.81 2:68 � j27:34 2:42 � j0:49
11 � 8:08 � j26:06 6:69 � j15:32 6.14+j3.67 6:37 � j0:75
13 + 9:08 + j35:18 4:04 + j21:26 6:03 + j5:21 3:07 + j4:29
17 � 9:25 � j50:30 10:88 � j33:31 14:62 � j15:86 5:22 � j9:59
19 + 13:93 + j54:39 17:58 + j44:59 11:80 + j20:30 5:13 + j11:27
23 � 16:89 � j65:15 19:32 � j45:34 25:03 � j37:73 7:42 � j15:98
25 + 23:30 + j68:76 23:53 + j50:81 18:05 + j34:35 7:28 + j15:86
29 � 29:98 � j82:94 26:64 � j62:56 42:98 � j46:43 12:01 � j21:11
Atendiendo a la Tabla 6.11, al considerar la secuencia positiva de un ar-mónico, si el valor de la parte imaginaria es negativo signi�ca que la cargaes capacitiva, si por el contrario dicho valor es positivo, la carga es inducti-va. Justo lo contrario ocurre para la secuencia negativa: valores positivos dela parte imaginaria de la impedancia están asociados con cargas capacitivas,mientras que valores negativos con inductivas. En este sentido, �jándose en lasimpedancias que presentan cada una de las ramas del �ltro para las frecuenciasa las cuales han sido sintonizados, se puede comprobar que el �ltro que deberíaestar sintonizado al séptimo armónico lo está un poco por encima, pues la im-pedancia para dicha frecuencia es ligeramente positiva. Idéntica consideraciónse puede realizar para el �ltro sintonizado al decimoprimer armónico, siendoen este caso la desintonización mayor.
Por otra parte, se puede comprobar que la parte resistiva de la impedanciade los distintos �ltros aumenta con la frecuencia debido al incremento de laspérdidas en el hierro de las bobinas.
6.5.3 Comparación de resultados teóricos y experimen-
tales
En este apartado se comparan los resultados teóricos con los experimentalespara proceder a la validación de los primeros. Además de la comparación de los
146
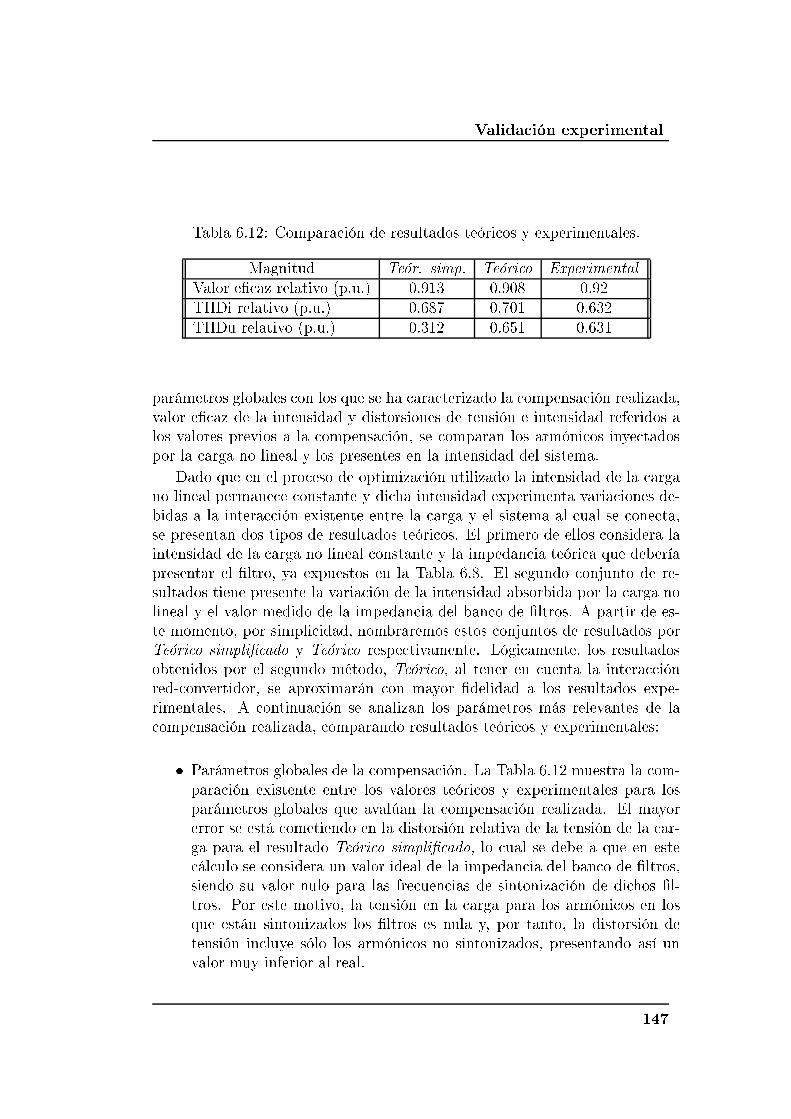
Validación experimental
Tabla 6.12: Comparación de resultados teóricos y experimentales.
Magnitud Teór. simp. Teórico ExperimentalValor e�caz relativo (p.u.) 0.913 0.908 0.92THDi relativo (p.u.) 0.687 0.701 0.632THDu relativo (p.u.) 0.312 0.651 0.631
parámetros globales con los que se ha caracterizado la compensación realizada,valor e�caz de la intensidad y distorsiones de tensión e intensidad referidos alos valores previos a la compensación, se comparan los armónicos inyectadospor la carga no lineal y los presentes en la intensidad del sistema.
Dado que en el proceso de optimización utilizado la intensidad de la cargano lineal permanece constante y dicha intensidad experimenta variaciones de-bidas a la interacción existente entre la carga y el sistema al cual se conecta,se presentan dos tipos de resultados teóricos. El primero de ellos considera laintensidad de la carga no lineal constante y la impedancia teórica que deberíapresentar el �ltro, ya expuestos en la Tabla 6.8. El segundo conjunto de re-sultados tiene presente la variación de la intensidad absorbida por la carga nolineal y el valor medido de la impedancia del banco de �ltros. A partir de es-te momento, por simplicidad, nombraremos estos conjuntos de resultados porTeórico simpli�cado y Teórico respectivamente. Lógicamente, los resultadosobtenidos por el segundo método, Teórico, al tener en cuenta la interacciónred-convertidor, se aproximarán con mayor �delidad a los resultados expe-rimentales. A continuación se analizan los parámetros más relevantes de lacompensación realizada, comparando resultados teóricos y experimentales:
� Parámetros globales de la compensación. La Tabla 6.12 muestra la com-paración existente entre los valores teóricos y experimentales para losparámetros globales que avalúan la compensación realizada. El mayorerror se está cometiendo en la distorsión relativa de la tensión de la car-ga para el resultado Teórico simpli�cado, lo cual se debe a que en estecálculo se considera un valor ideal de la impedancia del banco de �ltros,siendo su valor nulo para las frecuencias de sintonización de dichos �l-tros. Por este motivo, la tensión en la carga para los armónicos en losque están sintonizados los �ltros es nula y, por tanto, la distorsión detensión incluye sólo los armónicos no sintonizados, presentando así unvalor muy inferior al real.
147

Capítulo 6 Validación experimental
1 3 7 13 19 250
2
4
6
8
10
12
Orden de armónico
Inte
nsid
ad (
A)
Teórico 1 Teórico 2 Experimental
(a)
1 3 5 11 17 23 290
1
2
3
4
5
6
Orden de armónico
Inte
nsid
ad (
A)
Teórico 1 Teórico 2 Experimental
(b)
Figura 6.27: Comparación de los armónicos de la intensidad de la carga no lineal.
(a) Secuencia positiva. (b) Secuencia negativa.
� Intensidad de la carga no lineal. La comparación de los armónicos másrelevantes de la intensidad de la carga no lineal para los dos casos teóri-cos y el experimental es mostrada en la Figura 6.27 y las tablas 6.13 y6.14. Los órdenes de armónicos mostrados son los que se han tenido encuenta para calcular la intensidad del convertidor en el caso de conside-rar la interacción red-carga no lineal. En el caso Teórico simpli�cado, alser considerada la intensidad absorbida por la carga no lineal constan-te, dichos armónicos son los existentes antes de la instalación del �ltro.Se puede observar al comparar valores teóricos y experimentales que lavariación de la intensidad del convertidor por el hecho de instalar los�ltros pasivos se centra en los armónicos quinto y séptimo, mientras queel resto presentan leves variaciones respecto a su valor original. Estasdiferencias se justi�can por la variación que presentan las tensiones enbornas del convertidor para dichos armónicos por la instalación de los�ltros sintonizados. Por otra parte, para el caso Teórico, con interac-ción sistema-carga no lineal, al igual que en el caso de compensación concondensadores previamente analizado, los armónicos resultantes de dichoanálisis se adaptan �elmente a los valores experimentales.
� Intensidad del sistema. La Figura 6.28 y las tablas 6.15 y 6.16 comparanlos armónicos de intensidad del sistema después de instalar los �ltros pa-sivos. Si bien el primer armónico de intensidad tiene un valor superior alos 20 A, la Figura 6.28 muestra sólo hasta los 2.5 A para poder observar
148
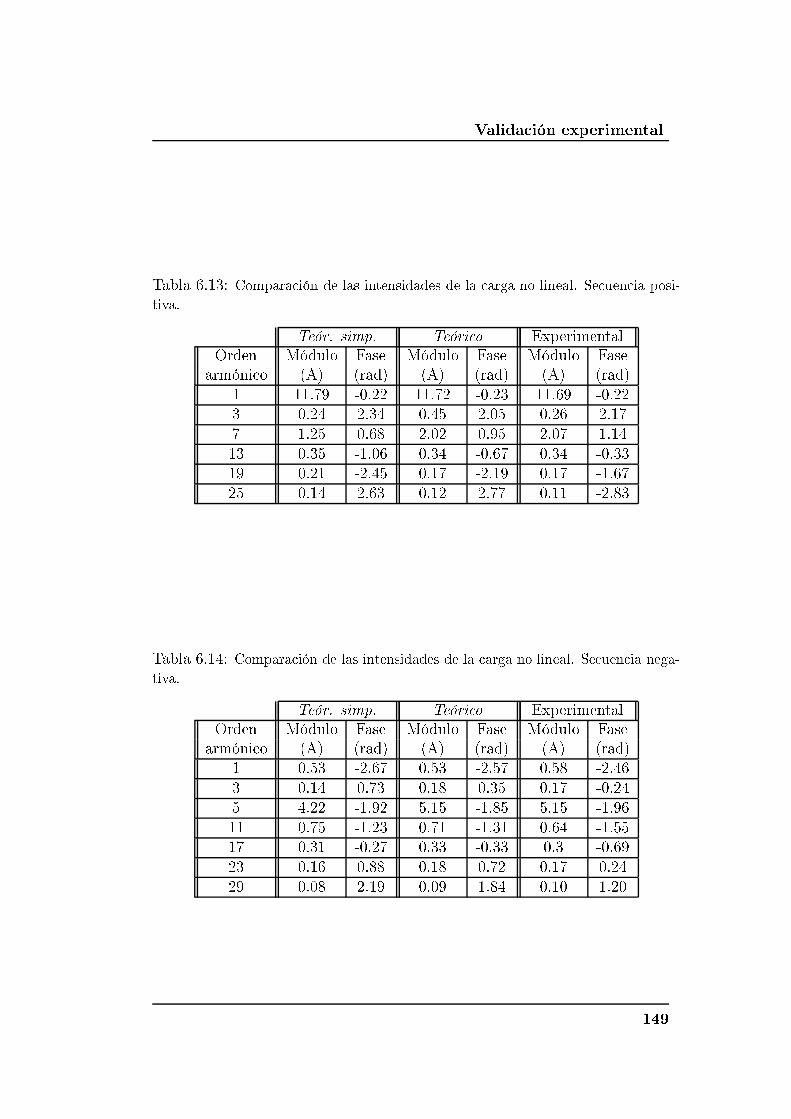
Validación experimental
Tabla 6.13: Comparación de las intensidades de la carga no lineal. Secuencia posi-
tiva.
Teór. simp. Teórico ExperimentalOrden Módulo Fase Módulo Fase Módulo Fase
armónico (A) (rad) (A) (rad) (A) (rad)1 11.79 -0.22 11.72 -0.23 11.69 -0.223 0.24 2.34 0.45 2.05 0.26 2.177 1.25 0.68 2.02 0.95 2.07 1.1413 0.35 -1.06 0.34 -0.67 0.34 -0.3319 0.21 -2.45 0.17 -2.19 0.17 -1.6725 0.14 2.63 0.12 2.77 0.11 -2.83
Tabla 6.14: Comparación de las intensidades de la carga no lineal. Secuencia nega-
tiva.
Teór. simp. Teórico ExperimentalOrden Módulo Fase Módulo Fase Módulo Fase
armónico (A) (rad) (A) (rad) (A) (rad)1 0.53 -2.67 0.53 -2.57 0.58 -2.463 0.14 0.73 0.18 0.35 0.17 -0.245 4.22 -1.92 5.15 -1.85 5.15 -1.9611 0.75 -1.23 0.71 -1.31 0.64 -1.5517 0.31 -0.27 0.33 -0.33 0.3 -0.6923 0.16 0.88 0.18 0.72 0.17 0.2429 0.08 2.19 0.09 1.84 0.10 1.20
149

Capítulo 6 Validación experimental
1 3 7 13 19 250
0.5
1
1.5
2
2.5
Orden de armónico
Inte
nsid
ad (
A)
Teórico 1 Teórico 2 Experimental
(a)
1 3 5 11 17 23 290
0.5
1
1.5
2
2.5
3
Orden de armónico
Inte
nsid
ad (
A)
Teórico 1 Teórico 2 Experimental
(b)
Figura 6.28: Comparación de los armónicos de la intensidad del sistema. (a) Se-
cuencia positiva. (b) Secuencia negativa.
mejor los valores de los armónicos de orden superior. La informaciónreferente a este armónico se encuentra en la Tabla 6.15, pudiéndose com-probar la gran similitud entre resultados teóricos y experimentales. Losresultados para la intensidad del sistema muestran una mayor discrepan-cia que los presentados para el caso de la carga no lineal, sobre todo paralos armónicos quinto y séptimo, si bien no son excesivas. Estas desvia-ciones se deben a errores asociados a las medidas de las impedancias,tanto de los �ltros pasivos como de las componentes lineales de la cargay a las pequeñas diferencias de fase existentes entre los valores teóricos yexperimentales de los armónicos de intensidad de la carga no lineal. Elorigen de todos ellos está asociado a errores de medida de tensiones e in-tensidades, ya sean de los transductores utilizados, como del instrumentovirtual desarrollado.
A pesar de este error, la Figura 6.29 muestra la similitud entre las inten-sidades teórica y experimental para cada una de las fases en el dominiodel tiempo. En dicha �gura, además de ser patente la semejanza exis-tente entre los valores teóricos y experimentales, se puede observar elcambio que sufre la intensidad debido a la instalación de los �ltros sinto-nizados: no sólo la distorsión de intensidad disminuye, lo cual se re�ejaen una onda de intensidad más parecida a una senoide, sino que se puedecomprobar como la onda se adelanta, manifestándose de esta forma lacompensación de potencia reactiva realizada.
150
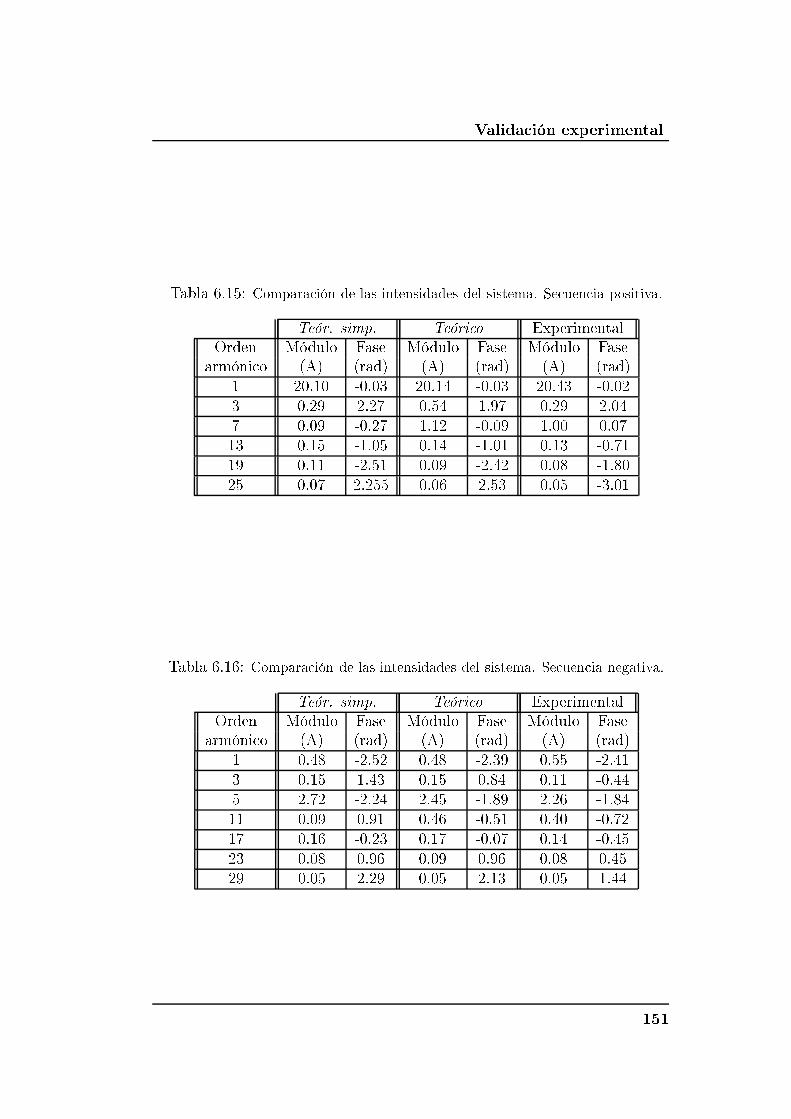
Validación experimental
Tabla 6.15: Comparación de las intensidades del sistema. Secuencia positiva.
Teór. simp. Teórico ExperimentalOrden Módulo Fase Módulo Fase Módulo Fase
armónico (A) (rad) (A) (rad) (A) (rad)1 20.10 -0.03 20.14 -0.03 20.43 -0.023 0.29 2.27 0.54 1.97 0.29 2.047 0.09 -0.27 1.12 -0.09 1.00 0.0713 0.15 -1.05 0.14 -1.01 0.13 -0.7119 0.11 -2.51 0.09 -2.42 0.08 -1.8025 0.07 2.255 0.06 2.53 0.05 -3.01
Tabla 6.16: Comparación de las intensidades del sistema. Secuencia negativa.
Teór. simp. Teórico ExperimentalOrden Módulo Fase Módulo Fase Módulo Fase
armónico (A) (rad) (A) (rad) (A) (rad)1 0.48 -2.52 0.48 -2.39 0.55 -2.413 0.15 1.43 0.15 0.84 0.11 -0.445 2.72 -2.24 2.45 -1.89 2.26 -1.8411 0.09 0.91 0.46 -0.51 0.40 -0.7217 0.16 -0.23 0.17 -0.07 0.14 -0.4523 0.08 0.96 0.09 0.96 0.08 0.4529 0.05 2.29 0.05 2.13 0.05 1.44
151
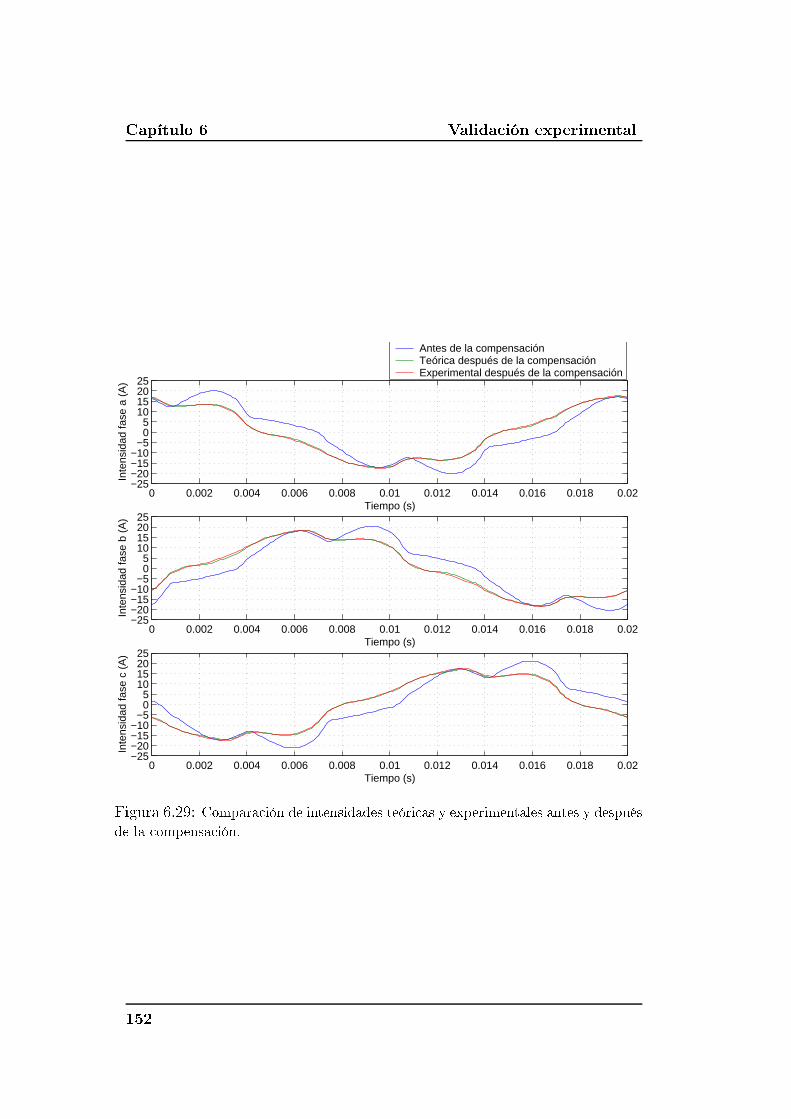
Capítulo 6 Validación experimental
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02−25−20−15−10
−505
10152025
Tiempo (s)
Inte
nsid
ad fa
se a
(A
)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02−25−20−15−10
−505
10152025
Tiempo (s)
Inte
nsid
ad fa
se b
(A
)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02−25−20−15−10
−505
10152025
Tiempo (s)
Inte
nsid
ad fa
se c
(A
)
Antes de la compensación Teórica después de la compensación Experimental después de la compensación
Figura 6.29: Comparación de intensidades teóricas y experimentales antes y después
de la compensación.
152
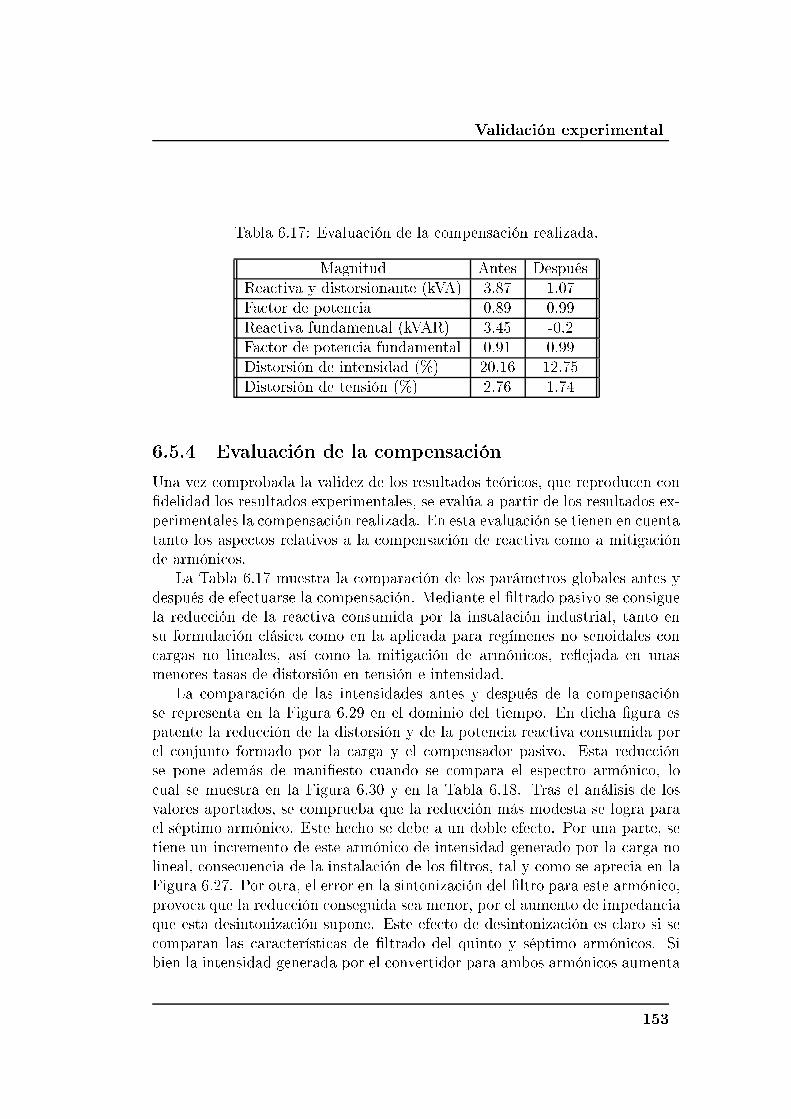
Validación experimental
Tabla 6.17: Evaluación de la compensación realizada.
Magnitud Antes DespuésReactiva y distorsionante (kVA) 3.87 1.07Factor de potencia 0.89 0.99Reactiva fundamental (kVAR) 3.45 -0.2Factor de potencia fundamental 0.91 0.99Distorsión de intensidad (%) 20.16 12.75Distorsión de tensión (%) 2.76 1.74
6.5.4 Evaluación de la compensación
Una vez comprobada la validez de los resultados teóricos, que reproducen con�delidad los resultados experimentales, se evalúa a partir de los resultados ex-perimentales la compensación realizada. En esta evaluación se tienen en cuentatanto los aspectos relativos a la compensación de reactiva como a mitigaciónde armónicos.
La Tabla 6.17 muestra la comparación de los parámetros globales antes ydespués de efectuarse la compensación. Mediante el �ltrado pasivo se consiguela reducción de la reactiva consumida por la instalación industrial, tanto ensu formulación clásica como en la aplicada para regímenes no senoidales concargas no lineales, así como la mitigación de armónicos, re�ejada en unasmenores tasas de distorsión en tensión e intensidad.
La comparación de las intensidades antes y después de la compensaciónse representa en la Figura 6.29 en el dominio del tiempo. En dicha �gura espatente la reducción de la distorsión y de la potencia reactiva consumida porel conjunto formado por la carga y el compensador pasivo. Esta reducciónse pone además de mani�esto cuando se compara el espectro armónico, locual se muestra en la Figura 6.30 y en la Tabla 6.18. Tras el análisis de losvalores aportados, se comprueba que la reducción más modesta se logra parael séptimo armónico. Este hecho se debe a un doble efecto. Por una parte, setiene un incremento de este armónico de intensidad generado por la carga nolineal, consecuencia de la instalación de los �ltros, tal y como se aprecia en laFigura 6.27. Por otra, el error en la sintonización del �ltro para este armónico,provoca que la reducción conseguida sea menor, por el aumento de impedanciaque esta desintonización supone. Este efecto de desintonización es claro si secomparan las características de �ltrado del quinto y séptimo armónicos. Sibien la intensidad generada por el convertidor para ambos armónicos aumenta
153

Capítulo 6 Validación experimental
1 3 7 13 19 250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Orden de armónico
Inte
nsid
ad (
A)
Antes compensación Después compensación
(a)
1 3 5 11 17 23 290
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Orden de armónico
Inte
nsid
ad (
A)
Antes compensación Después compensación
(b)
Figura 6.30: Comparación de resultados experimentales antes y después de la com-
pensación.
a la hora de instalar los �ltros, las reducciones para el quinto son superioresdebido a la mejor sintonización que el �ltro correspondiente presenta.
Por otra parte, es interesante comprobar como los resultados para el de-cimoprimer armónico son mejores que los que en un principio cabría esperarpor la desintonización que presentaba este �ltro. Esto se debe a que, si bien elvalor de impedancia que presenta el �ltro para dicho armónico es muy elevadoen comparación con la existente en los armónicos quinto y séptimo, dicho valores pequeño si se compara con la impedancia del sistema, con la que forma undivisor de intensidad.
6.6 Resumen del capítulo
En el presente capítulo se ha validado de forma experimental el procedimientoteórico de optimización de �ltros pasivos desarrollado en el Capítulo 4. Paraello, se ha montado en el laboratorio una red de distribución a escala, en laque una industria, compuesta por cargas lineales y no lineales, se alimenta deuna subestación a través de una línea aérea.
Antes de proceder al diseño e instalación del �ltro mediante el métodopropuesto, se ha procedido a realizar la compensación de la potencia reactivamediante la instalación de distintas baterías de condensadores. Los resultadosexperimentales de la compensación en estas condiciones, si bien siguen la ten-dencia descrita por los resultados teóricos (aumento de la distorsión armónica
154
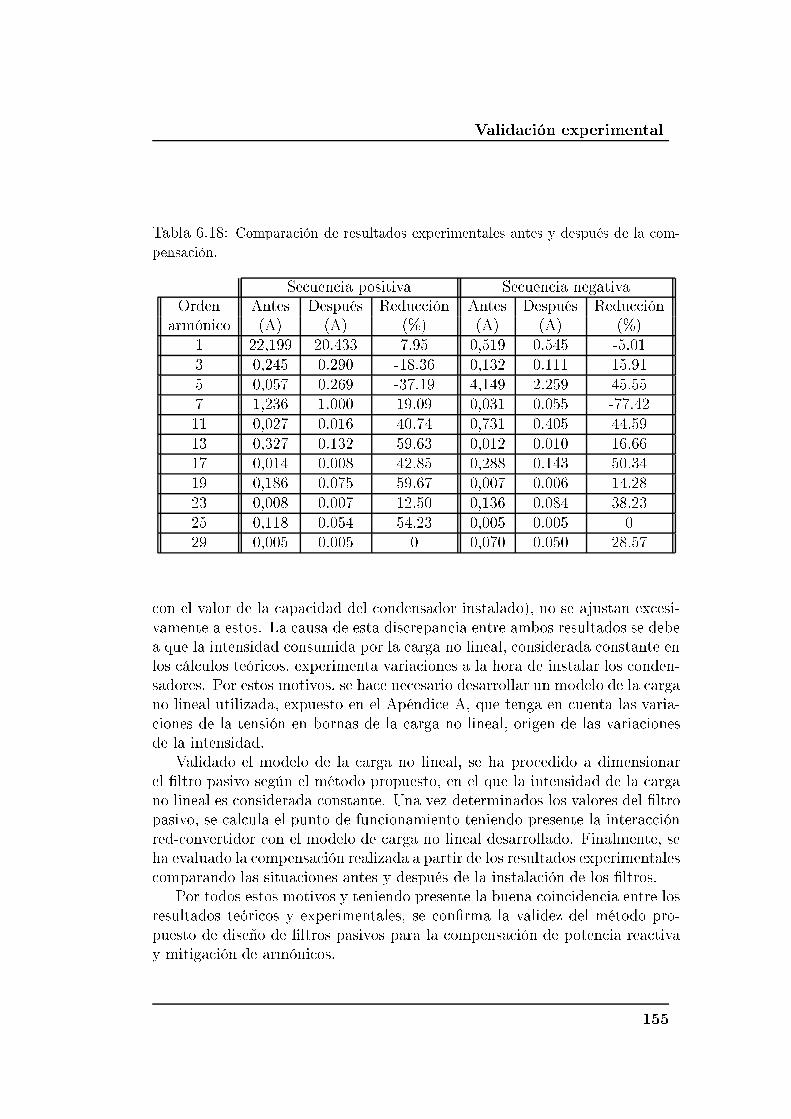
Validación experimental
Tabla 6.18: Comparación de resultados experimentales antes y después de la com-
pensación.
Secuencia positiva Secuencia negativaOrden Antes Después Reducción Antes Después Reducción
armónico (A) (A) (%) (A) (A) (%)1 22,199 20.433 7.95 0,519 0.545 -5.013 0,245 0.290 -18.36 0,132 0.111 15.915 0,057 0.269 -37.19 4,149 2.259 45.557 1,236 1.000 19.09 0,031 0.055 -77.4211 0,027 0.016 40.74 0,731 0.405 44.5913 0,327 0.132 59.63 0,012 0.010 16.6617 0,014 0.008 42.85 0,288 0.143 50.3419 0,186 0.075 59.67 0,007 0.006 14.2823 0,008 0.007 12.50 0,136 0.084 38.2325 0,118 0.054 54.23 0,005 0.005 029 0,005 0.005 0 0,070 0.050 28.57
con el valor de la capacidad del condensador instalado), no se ajustan excesi-vamente a estos. La causa de esta discrepancia entre ambos resultados se debea que la intensidad consumida por la carga no lineal, considerada constante enlos cálculos teóricos, experimenta variaciones a la hora de instalar los conden-sadores. Por estos motivos, se hace necesario desarrollar un modelo de la cargano lineal utilizada, expuesto en el Apéndice A, que tenga en cuenta las varia-ciones de la tensión en bornas de la carga no lineal, origen de las variacionesde la intensidad.
Validado el modelo de la carga no lineal, se ha procedido a dimensionarel �ltro pasivo según el método propuesto, en el que la intensidad de la cargano lineal es considerada constante. Una vez determinados los valores del �ltropasivo, se calcula el punto de funcionamiento teniendo presente la interacciónred-convertidor con el modelo de carga no lineal desarrollado. Finalmente, seha evaluado la compensación realizada a partir de los resultados experimentalescomparando las situaciones antes y después de la instalación de los �ltros.
Por todos estos motivos y teniendo presente la buena coincidencia entre losresultados teóricos y experimentales, se con�rma la validez del método pro-puesto de diseño de �ltros pasivos para la compensación de potencia reactivay mitigación de armónicos.
155
Capítulo 6 Validación experimental
156
Capítulo 7
Conclusiones y futuras líneas deinvestigación
7.1 Resumen y conclusiones
En la presente tesis se ha abordado el problema del diseño óptimo de �ltrospasivos para la compensación de reactiva y mitigación de armónicos en insta-laciones industriales.
Tras la breve presentación del problema en el capítulo introductorio, en elCapítulo 2 se han revisado los conceptos de potencia reactiva para regímenessenoidales y no senoidales. Se ha puesto de mani�esto que la extensión de lade�nición clásica de potencia reactiva para los regímenes senoidales a otros nosenoidales no es del todo adecuada, dado que la compensación de esta magnitudno conlleva asociado el incremento del factor de potencia. Por otra parte, seha destacado la relación existente entre la potencia reactiva y los armónicos.
En el Capítulo 3 se ha realizado una revisión bibliográ�ca tanto de lasde�niciones más relevantes de potencia reactiva como de los métodos de diseñode �ltros pasivos que aparecen en la literatura especializada. Las de�nicionesde potencia reactiva analizadas se extienden a sistemas monofásicos y trifásicos,dividiéndose en función de su formulación en dos grandes grupos: dominio deltiempo y de la frecuencia. Por otra parte, el análisis de los métodos de diseñode �ltros pasivos existentes pone de mani�esto la ausencia de procedimientossistemáticos de diseño hasta hace relativamente poco tiempo. Además, seincide sobre las carencias que estos últimos métodos tienen en ciertos aspectosde su formulación.
Una vez conocidas y estudiadas tanto las de�niciones de potencia reactivacomo los distintos métodos de diseño de �ltros pasivos, en el Capítulo 4 se
157
Capítulo 7 Conclusiones y futuras líneas de investigación
ha presentado una nueva metodología para el diseño de �ltros pasivos. Unavez seleccionada la de�nición de potencia reactiva idónea para sistemas dedistribución industriales, se procede a efectuar la formulación del problema. Eldiseño de los �ltros se efectúa bajo el criterio de minimización de la potenciareactiva demandada por la instalación, o lo que es lo mismo, de la componentede intensidad ortogonal a la tensión en la carga. El problema fundamental quese presenta en la minimización de dicha función es su carácter no lineal, lo cualobliga a la utilización de un algoritmo primal-dual de punto interior y barreralogarítmica. En este sentido, las principales aportaciones de la tesis se centranen los siguientes aspectos:
� Resonancias. Se ha podido constatar que las resonancias son las cau-santes del comportamiento no lineal de la función objetivo planteada.La resonancia para un determinado armónico es una función lineal de lacapacidad de los condensadores de los �ltros instalados.
� Regiones factibles. El carácter no lineal de la función objetivo implicala multiplicidad de mínimos locales, cada uno de los cuales se encuentraen una región delimitada por los hiperplanos de resonancia. El cálculode estas regiones en las cuales se localizan los mínimos locales se realizamediante un proceso sistemático. En este sentido, la solución alcanzadapor el algoritmo de minimización siempre es el óptimo global del proble-ma, pues a priori se conocen el número de mínimos locales existentes, alhaber sido determinadas las regiones factibles.
� Restricciones adicionales. Mediante la inclusión de las restricciones adi-cionales se han conseguido dos objetivos:
� Control total sobre la posición de los puntos de resonancia que secrean en el sistema por la adición de los �ltros pasivos. De estaforma, variaciones de los parámetros, tanto de los �ltros por enve-jecimiento, o de la red por recon�guraciones, no llevan al sistema asituaciones críticas de resonancia.
� La potencia reactiva en el armónico fundamental no es nunca capa-citiva para cumplir de esta forma la normativa vigente.
Dada la �exibilidad de la formulación propuesta, es fácil la inclusión enel problema de otro tipo de restricciones, aparte de las mencionadas, yasean de índole técnico, económico o normativo.
158
Conclusiones y futuras líneas de investigación
En el Capítulo 5 se ha analizado el comportamiento del método de opti-mización propuesto con una red de distribución concreta. En este sentido seha estudiado la in�uencia que los distintos parámetros tienen en el proceso deoptimización y cómo estos in�uyen en el resultado �nal. La compensación seha caracterizado mediante el valor e�caz y la distorsión de la intensidad delsistema y la distorsión de tensión de la carga después de la instalación de los�ltros. Los parámetros que han sido tenidos en cuenta han sido la distorsiónde tensión del sistema, la distorsión de intensidad de la carga y otros como laimpedancia de la línea.
El Capítulo 6 se ha dedicado a la validación experimental del método dediseño de �ltros pasivos que se ha desarrollado en el Capítulo 4. Para este �n seha montado en el laboratorio una red de distribución a escala, que correspondea una instalación industrial que se alimenta de una subestación a través de unalínea aérea, en la que la tensión de alimentación y la intensidad demandadapor la industria están distorsionadas. A partir de las medidas de impedanciasde la red y de la carga, así como de los armónicos de tensión e intensidadse procedió al diseño de un �ltro pasivo según el procedimiento desarrollado.El método de diseño propuesto ha sido validado dada la buena concordanciaentre los valores experimentales y los resultados teóricos obtenidos empleandoel modelo de carga no lineal desarrollado en el Apéndice A y la interaccióncarga no lineal-red.
En el Apéndice A se ha desarrollado un modelo de un variador de veloci-dad para un motor de inducción. Dicho modelo se hace necesario para estimarcon precisión los armónicos de intensidad demandados por la carga no linealempleada en el Capítulo 6, como consecuencia de la instalación de los �ltrospasivos. En este sentido, se ha desarrollado y validado de forma experimentalun modelo en el que las tensiones de alimentación del recti�cador de entradapueden estar distorsionadas y desequilibradas, teniéndose en cuenta los pe-riodos de conmutación. Además, este modelo puede utilizarse en cálculos enlos que se tiene presente la interacción entre la red y la carga no lineal, puesademás de obtenerse las expresiones analíticas de los armónicos de intensidad,se calculan sus derivadas respecto a las tensiones de alimentación.
7.2 Sugerencias y futuras líneas de investigación
A partir del trabajo desarrollado cabría sugerir las siguientes líneas futuras deinvestigación:
� En la formulación del proceso de optimización, la intensidad demandada
159
Capítulo 7 Conclusiones y futuras líneas de investigación
por las cargas no lineales ha sido considerada constante. Como ha podidocomprobarse de forma experimental, las intensidades consumidas por lascargas no lineales depende de la tensión de alimentación existente en susbornas, que se ve modi�cada por la adición de los �ltros pasivos. Una vezcalculado e instalado el �ltro pasivo con esta simpli�cación, se procede aun ajuste del punto de funcionamiento mediante el cálculo de armónicosteniendo en cuenta la interacción red-convertidor. En este sentido, seríade especial interés poder incluir en el proceso de optimización las varia-ciones de la intensidad de la carga no lineal en función de las capacidadesde los �ltros pasivos que se instalan.
� Aplicación del método de diseño con otras funciones objetivo. El métodode diseño de �ltros pasivos desarrollado se basa en la minimización depotencia reactiva. Sin embargo, todas las conclusiones extraídas respectoa las regiones factibles delimitadas por las resonancias que crean losarmónicos de tensión en intensidad y las restricciones adicionales para elcontrol de las resonancias que incluyen los �ltros instalados y la potenciareactiva del fundamental pueden ser aplicadas a otras funciones objetivo,como distorsión de intensidad y/o distorsión de tensión, costes, etc.
� Extensión de los criterios de diseño a �ltros híbridos. Sin duda esta esuna de las líneas de investigación más prometedoras dentro del campode mitigación de armónicos en redes industriales: la conjunción de los�ltros pasivos y activos. Por una parte, los �ltros pasivos se encargaríande compensar la potencia reactiva y los grandes armónicos presentes enla red. Por otra, el �ltro activo se utilizaría para eliminar los armónicosde orden superior de menor importancia. De esta forma, la potenciadel �ltro activo se reduciría notablemente, consiguiéndose un sistema de�ltrado e�ciente y económico.
160
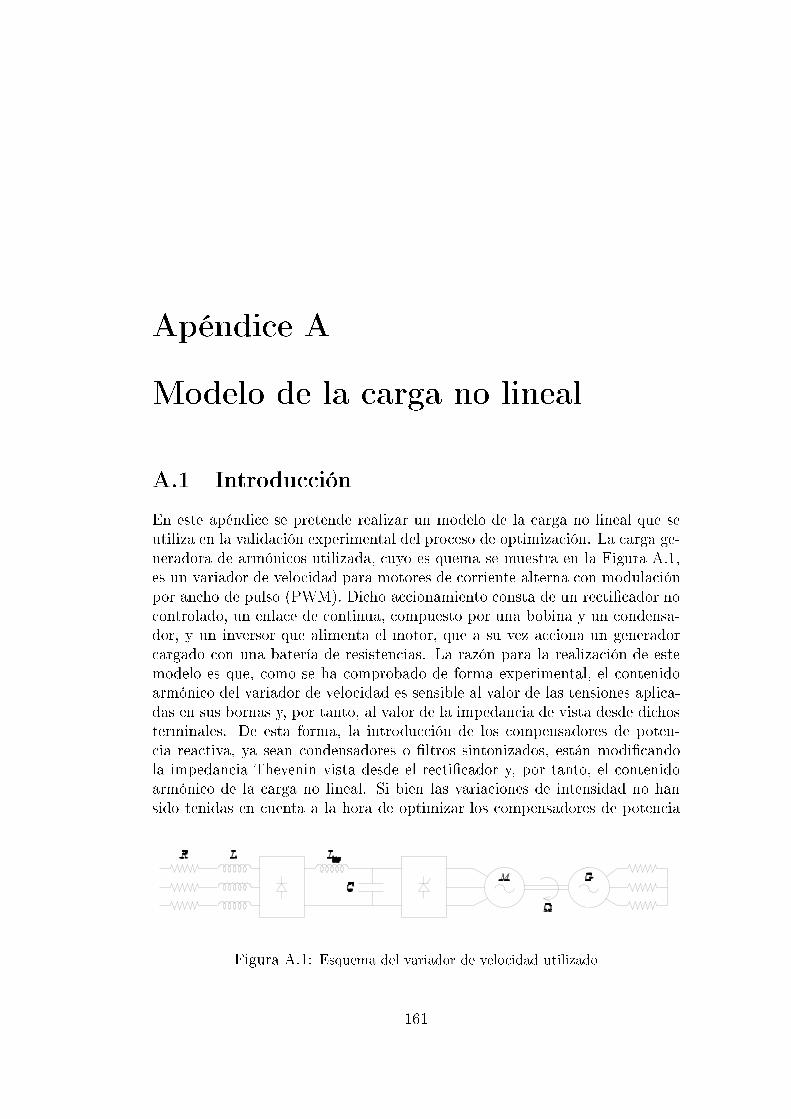
Apéndice A
Modelo de la carga no lineal
A.1 Introducción
En este apéndice se pretende realizar un modelo de la carga no lineal que seutiliza en la validación experimental del proceso de optimización. La carga ge-neradora de armónicos utilizada, cuyo es quema se muestra en la Figura A.1,es un variador de velocidad para motores de corriente alterna con modulaciónpor ancho de pulso (PWM). Dicho accionamiento consta de un recti�cador nocontrolado, un enlace de continua, compuesto por una bobina y un condensa-dor, y un inversor que alimenta el motor, que a su vez acciona un generadorcargado con una batería de resistencias. La razón para la realización de estemodelo es que, como se ha comprobado de forma experimental, el contenidoarmónico del variador de velocidad es sensible al valor de las tensiones aplica-das en sus bornas y, por tanto, al valor de la impedancia de vista desde dichosterminales. De esta forma, la introducción de los compensadores de poten-cia reactiva, ya sean condensadores o �ltros sintonizados, están modi�candola impedancia Thevenin vista desde el recti�cador y, por tanto, el contenidoarmónico de la carga no lineal. Si bien las variaciones de intensidad no hansido tenidas en cuenta a la hora de optimizar los compensadores de potencia
Figura A.1: Esquema del variador de velocidad utilizado
161
Apéndice A Modelo de la carga no lineal
reactiva, este modelo servirá para calcular las nuevas intensidades con éstosinstalados y así poder establecer una comparación más precisa de los resultadosteóricos y experimentales.
A.2 Simpli�caciones del modelo
En este modelo de variador de velocidad se está interesado únicamente enconocer las intensidades de entrada al recti�cador no controlado, careciendode interés otros aspectos del accionamiento, por lo que se han realizado lassiguientes simpli�caciones:
� Desde la red el accionamiento se ve como un recti�cador no controladoque alimenta un enlace de continua, formado por una bobina y un con-densador, del que el inversor está demandando una potencia, que seráfunción tanto de la velocidad del motor como del par resistente que estéofreciendo el generador. Entonces, el conjunto inversor-motor-generador,puede ser sustituido por una resistencia que está demandando la mismapotencia, como puede verse en la Figura A.2.(a).
� Normalmente, el valor de la capacidad de los condensadores que se dis-ponen en el lado de continua de los accionamientos de alterna es elevado,para que la tensión a la entrada del inversor sea lo más constante posibley así obtener una tensión en bornas del motor cercana a senoidal. Por es-te motivo, la tensión del condensador puede suponerse constante, a pesarde tener un rizado superpuesto, función de la frecuencia de trabajo y lacarga del inversor, que en primera aproximación puede ser despreciado,obteniéndose el circuito que se muestra en la Figura A.2.(b).
� De esta forma, al sustituir el condensador por una fuente de tensióncontinua, la consideración de la resistencia que representa al conjuntoinversor-motor-generador no es necesaria para la determinación de lasintensidades de entrada del recti�cador, pues queda en paralelo con dichafuente, como se observa en la Figura A.2.(c).
� Una vez suprimida la resistencia, el valor de la tensión de la fuente decontinua determinará la potencia que está absorbiendo el accionamiento.
162

A.3 Análisis de los modos de funcionamiento del recti�cador
(a) (b)
(c)
Figura A.2: Simpli�caciones del modelo. (a) Carga desde el enlace de continua. (b)
Tensión del condensador constante. (c) Modelo simpli�cado �nal.
A.3 Análisis de los modos de funcionamiento delrecti�cador
En esta sección se obtendrán las ecuaciones fundamentales de la intensidad enel dominio del tiempo. Dado que el modelo que se desarrolla tiene que validarsecon unos resultados experimentales, éste ha de ser lo más general posible, porlo que las tensiones de alimentación se suponen periódicas, no senoidales y condesequilibrio:
ua(t) =p2Xk
Uak sin(k!t+ �ak) (A.1)
ub(t) =p2Xk
Ubk sin(k!t+ �bk � 2�=3) (A.2)
uc(t) =p2Xk
Uck sin(k!t+ �ck + 2�=3) (A.3)
Dichas tensiones pueden expresarse en función de los armónicos de tensión delvector de Park. Si u(t) es el vector de Park asociado al sistema trifásico detensiones de�nido se puede escribir:
u(t) =+1X�1
Ukejk!t (A.4)
Los índices positivos están asociados con la secuencia positiva del armónicok-esimo, mientras que los negativos corresponden al conjugado de la secuencia
163

Apéndice A Modelo de la carga no lineal
Figura A.3: Intensidades demandadas por el recti�cador no controlado.
negativa para dicho armónico. De esta forma, y mediante la matriz de transfor-mación de coordenadas, es posible expresar las tensiones trifásicas anterioresen función de los fasores Uk de la siguiente forma:
ua(t) =
r2
3
Xk
Uk sin(k!t+ �k) (A.5)
ub(t) =
r2
3
Xk
Uk sin(k!t+ �k � 2�=3) (A.6)
uc(t) =
r2
3
Xk
Uk sin(k!t+ �k + 2�=3) (A.7)
donde Uk y �k son el módulo y el argumento del fasor Uk, y el índice k de lossumatorios se extiende tanto a números positivos como negativos.
Se presentan tres estados posibles de funcionamiento para cada una de lasfases dependiendo de la tensión ánodo-cátodo que tengan los diodos del puenteen cada instante: conducción, corte y conmutación. A continuación, se analizaun semiciclo positivo de la onda de intensidad de la fase a mostrada en laFigura A.3:
164

A.3 Análisis de los modos de funcionamiento del recti�cador
Figura A.4: Intervalo 1. Conducción fases b y c.
Figura A.5: Intervalo 2. Conmutación fases a y c.
� Intervalo 1: t 2 [0; �a]. En este periodo, representado en la Figura A.4,conducen las fases b y c siendo la intensidad ia(t) nula, pues la tensiónánodo-cátodo del diodo 1 es negativa:
i(1)a (t) = 0 (A.8)
El �nal de este periodo se alcanza cuando dicha tensión se hace cero,que, cuando la tensión de alimentación es senoidal y equilibrada, coincidecon el ángulo �=6.
� Intervalo 2: t 2 [�a; �a + �a]. Ahora la tensión de línea ua0c0 polarizadirectamente el diodo 1 y comienza a conducir. Debido a la presenciade las bobinas en el lado de alterna, la intensidad de la fase c no puedevariar instantáneamente y comienza la conmutación entre ambas fases.El circuito que se obtiene se representa en la Figura A.5. Tras el análisisde dicho circuito se pueden plantear las siguientes ecuaciones para elcálculo de la intensidad en este periodo de funcionamiento:
uac = R(ia � ic) + Ld(ia � ic)
dt(A.9)
165

Apéndice A Modelo de la carga no lineal
uab = R(ia � ib) + Ld(ia � ib)
dt+ Ldc
diadt
+ Udc (A.10)
ia + ib + ic = 0 (A.11)
La ecuación diferencial que gobierna la intensidad de la fase a se obtienede las anteriores:
(3L+ Ldc)diadt
+ 3Ria = 3ua � Udc (A.12)
La solución de la ecuación (A.12) consta de un término correspondientea un transitorio de primer orden más otro de régimen permanente:
i(2)a (t) = K1e�3R
3L+Ldct+p6Xk
Pk Uk sin(k!t+ �k � 'k)
Zk
� Udc
3R(A.13)
donde Zk es el módulo de la impedancia total para el armónico k-esimo,incluyendo el lado de alterna más continua, y 'k es la fase de dichaimpedancia. La constante de integración K1 se determina en función delas condiciones iniciales del intervalo que serán detalladas en la siguientesección.
Este intervalo �naliza cuando la intensidad ic alcance un valor nulo, locual se produce en un ángulo �a a partir del inicio de la conducción,que no es conocido a priori. El análisis de la duración de este periodose realizará en la siguiente sección junto con la determinación de lasconstantes de integración.
� Intervalo 3: t 2 [�a + �a; �c]. Una vez �nalizada la conmutación entrelas fases a y c, las fases a y b conducen siguiendo el circuito de la FiguraA.6.Tras el análisis de este circuito se puede plantear la siguiente ecuaciónpara la intensidad:
(2L + Ldc)diadt
+ 2Ria = uab � Udc (A.14)
i(3)a (t) = K2e�2R
2L+Ldct+p2Xk
Pk Uk sin(k!t+ �k � 'k + �=6)
Zk� Udc
2R
(A.15)Hay que tener en cuenta que los valores de la impedancia Zk y el ángulo'k han variado respecto al intervalo anterior, pues ahora contiene sólo
166

A.3 Análisis de los modos de funcionamiento del recti�cador
Figura A.6: Intervalo 3. Conducción fases a y b.
Figura A.7: Intervalo 4. Conmutación fases b y c.
dos veces a la impedancia de la línea, mientras que en el caso anterior loeran tres. La constante de integración K2 será determinada en funciónde las condiciones iniciales del intervalo.
� Intervalo 4: t 2 [�c; �c + �c]. En este periodo aparece la conmutaciónde las fases b y c dado que la tensión ánodo-cátodo del diodo 6 se ha-ce positiva, obteniéndose el circuito de la Figura A.7. La ecuación defuncionamiento y su solución para este intervalo son las siguientes:
(3L + 2Ldc)diadt
+ 3Ria = 3ua � 2Udc (A.16)
i(4)a (t) = K3e�3R
3L+2Ldct+p6Xk
Pk Uk sin(k!t+ �k � 'k)
Zk� 2Udc
3R(A.17)
� Intervalo 5: t 2 [�c + �c; �b]. Una vez �nalizada la conmutación de lasfases b y c, la conducción se establece ahora entre las fases a y c, tal ycomo se muestra en la Figura A.8. Las ecuaciones son idénticas a lasobtenidas en el Intervalo 3, cambiando las fase b por la c, por lo que lasecuaciones toman la siguiente forma:
167

Apéndice A Modelo de la carga no lineal
Figura A.8: Intervalo 5. Conducción fases a y b.
Figura A.9: Intervalo 6. Conmutación fases a y b.
(2L+ Ldc)diadt
+ 2Ria = uac � Udc (A.18)
i(5)a (t) = K4e�2R
2L+Ldct �
p2Xk
Pk Uk sin(k!t+ �k � 'k + 5�=6)
Zk� Udc
2R
(A.19)Tal y como se comentará en la sección posterior, ya sea régimen de fun-cionamiento con tensiones equilibradas o no, no es necesario calcular ex-plícitamente este periodo de funcionamiento, pues la constante K4 puedehallarse a partir de otras variables que han sido ya previamente calcula-das.
� Intervalo 6: t 2 [�b; �b + �b]. En este periodo el diodo 2 comienza aconducir, iniciándose la conmutación entre las fases a y b. Las ecuacionesresultantes al resolver el circuito de la Figura A.9 son idénticas a las delIntervalo 1, cambiando sólo la condición inicial:
(3L+ Ldc)diadt
+ 3Ria = 3ua � Udc (A.20)
168
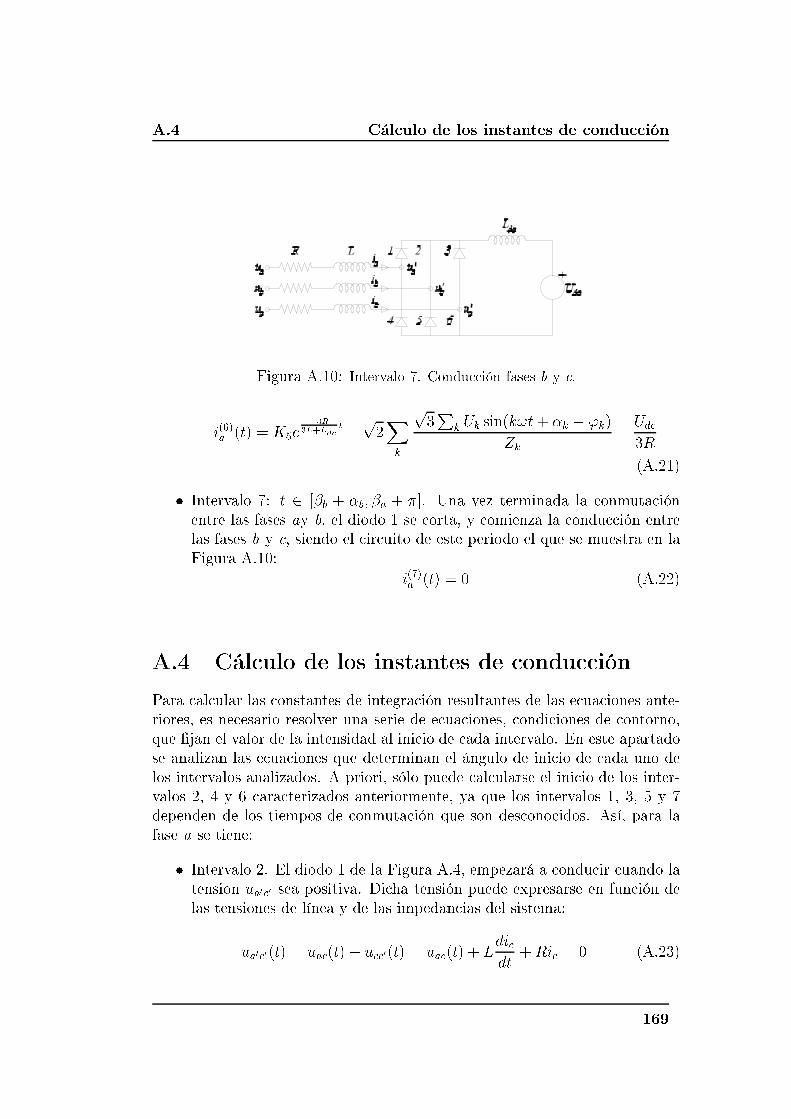
A.4 Cálculo de los instantes de conducción
Figura A.10: Intervalo 7. Conducción fases b y c.
i(6)a (t) = K5e�3R
3L+Ldct+p2Xk
p3P
k Uk sin(k!t+ �k � 'k)
Zk� Udc
3R
(A.21)
� Intervalo 7: t 2 [�b + �b; �a + �]. Una vez terminada la conmutaciónentre las fases ay b, el diodo 1 se corta, y comienza la conducción entrelas fases b y c, siendo el circuito de este periodo el que se muestra en laFigura A.10:
i(7)a (t) = 0 (A.22)
A.4 Cálculo de los instantes de conducción
Para calcular las constantes de integración resultantes de las ecuaciones ante-riores, es necesario resolver una serie de ecuaciones, condiciones de contorno,que �jan el valor de la intensidad al inicio de cada intervalo. En este apartadose analizan las ecuaciones que determinan el ángulo de inicio de cada uno delos intervalos analizados. A priori, sólo puede calcularse el inicio de los inter-valos 2, 4 y 6 caracterizados anteriormente, ya que los intervalos 1, 3, 5 y 7dependen de los tiempos de conmutación que son desconocidos. Así, para lafase a se tiene:
� Intervalo 2. El diodo 1 de la Figura A.4, empezará a conducir cuando latension ua0c0 sea positiva. Dicha tensión puede expresarse en función delas tensiones de línea y de las impedancias del sistema:
ua0c0(t) = uac(t) + ucc0(t) = uac(t) + Ldicdt
+Ric = 0 (A.23)
169

Apéndice A Modelo de la carga no lineal
� Intervalo 4. Para que comience este intervalo, por la Figura A.6, latensión que tiene que ser positiva es uc0b0 :
uc0b0(t) = ucb(t) + ubb0(t) = ubc(t) + Ldibdt
+Rib = 0 (A.24)
� Intervalo 6. De igual forma que en los casos anteriores, y según puedecomprobarse en la Figura A.8, la ecuación que hay que igualar a cero esub0a0 :
ub0a0(t) = uba(t) + uaa0(t) = uba(t) + Ldiadt
+Ria = 0 (A.25)
Estas ecuaciones no lineales se resuelven mediante la aplicación de un métodonumérico como Newton-Raphson.
A.5 Aplicación de las condiciones de contorno
Analizados los diferentes estados de funcionamiento en el semiperiodo positivode la intensidad ia(t) y el inicio de cada una de los intervalos, quedan pordeterminar las constantes de integración consideradas, que son función de losvalores iniciales que toma la intensidad en cada uno de ellos. Estas condicionesde contorno dependen de si la tensión de alimentación es equilibrada o no.Las siguientes secciones determinan las condiciones de contorno que se debensatisfacer para estos dos tipos de tensiones.
A.5.0.1 Tensiones equilibradas
Si la tensión de alimentación es equilibrada, las intensidades que demanda elinversor son también equilibradas si se suponen condiciones ideales para losdiodos del recti�cador e impedancias de entrada iguales para cada una de lasfases. De esta forma, las intensidades en las tres fases son exactamente igualespero desplazadas un cierto ángulo:
ia(!t) = ib(!t� 2�
3) = ic(!t+
2�
3) (A.26)
En este caso, las condiciones de contorno se simpli�can notablemente por lasimetría existente. Para establecer las condiciones se utilizará la Figura A.3 yla intensidad ia:
170

A.5 Aplicación de las condiciones de contorno
� Inicio del Intervalo 2. La intensidad al inicio del intervalo es nula. Deesta condición se extrae el valor de la constante K1:
i(2)a (�a) = 0 (A.27)
� Igualdad de las intensidades al inicio del Intervalo 3 y �nal del Intervalo2. Esta condición aparece cuando �naliza la conmutación del diodo 1 dela Figura A.4, un ángulo �a después del inicio de su conducción en elángulo �a:
i(2)a (�a + �a) = i(3)a (�a + �a) (A.28)
Este ángulo de conmutación, �a es en principio desconocido al igual quela constante K2.
� Igualdad de las intensidades al inicio del Intervalo 4 y �nal del Intervalo 3.Esta condición aparece cuando termina el primer periodo de conduccióndel diodo 1, justo en el instante en que el diodo 6 de la fase c empiezaa conducir para conmutar con el diodo 5 de la fase b. De esta forma, setiene una ecuación función de las constantes K2 y K3, dado que el ángulo�c se conoce a priori:
i(3)a (�c) = i(4)a (�c) (A.29)
� Igualdad de las intensidades al �nal del Intervalo 4 con el �nal del Inter-valo 2. Esta condición es consecuencia de la alimentación con tensionesequilibradas. En efecto, el Intervalo 4 de la fase a corresponde a la con-mutación de las fases b y c. Por la ecuación (A.26), dicha conmutacióndebe ser igual para las fases b y c, lo cual tiene como consecuencia quetanto el tiempo de conmutación como la intensidad �nal del intervalo sonidénticos para cada una de las fases. Como consecuencia, esta condiciónestablece una ecuación en función del ángulo �a desconocido y de lasconstantes K2 y K3:
i(4)a (�c + �a) = i(2)a (�a + �a) (A.30)
Las incógnitas de las tres ecuaciones planteadas, (A.28)-(A.30), son el intervalode conmutación �a y las constantes K2 y K3, por lo que se tiene cerrado elproblema.
Una vez resuelto, se pueden calcular el resto de los intervalos a partir delas constantes calculadas. Para el Intervalo 5, basta con calcular la constanteK4, que se puede expresar en función de K2 debido a la simetría:
K4 = K2e�2R
2L+Ldc
�3 (A.31)
171

Apéndice A Modelo de la carga no lineal
Por otra parte, el Intervalo 6 se calcula a partir de las intensidades de lasfases b y c para dicho intervalo. Estas intensidades se pueden obtener enfunción de las intensidades calculadas para los intervalos 2 y 4 de la fase a,respectivamente, según puede apreciarse en la Figura A.3:
ib(!t) = i(2)a (!t+2�
3) (A.32)
ic(!t) = �i(4)a (!t+4�
3) (A.33)
Es de destacar en este punto que la determinación de este intervalo de funcio-namiento, Intervalo 6, no puede hacerse de la misma forma en la que se obtuvoel Intervalo 5, ésto es, mediante el cálculo de la constante de integración. Estehecho se debe a que las intensidades de las fases b y c tienen constantes detiempo diferentes para este intervalo. Otra forma de proceder menos costosaes calcular la constante de integración K5, a partir de la condición inicial delIntervalo 6:
i(5)a (�b) = i(6)a (�b) (A.34)
A.5.0.2 Tensiones desequilibradas
En este caso, las intensidades de cada fase no cumplen la ecuación (A.26),por lo que es necesario resolver un sistema de ecuaciones de mayor dimensión.Como consecuencia del desequilibrio de tensiones los intervalos de conmutaciónno son ahora iguales en las tres fases. Sin embargo, el sistema de ecuacionesque se plantea para determinar las constantes e intervalos de conmutaciónsigue el patrón de�nido anteriormente. Si en el caso equilibrado se resolvió unsistema de tres ecuaciones para la determinación de las constantes, al analizarel caso desequilibrado aparecerán nueve ecuaciones a resolver, cuyas incógnitasserán los intervalos de conmutación de cada una de las fases (�a, �b, �c) y lasconstantes de integración (Ka
2 , Ka3 , K
b2, K
b3, K
c2, K
c3).
Las ecuaciones (A.27), (A.28) y (A.29)se plantearán de forma idéntica paracada una de las fases, mientras que la ecuación (A.30) igualará las intensidadesde distintas fases. Con todo esto el sistema a resolver estará formado por lassiguientes ecuaciones:
i(2)a (�a + �a) = i(3)a (�a + �a) (A.35)
i(3)a (�c) = i(4)a (�c) (A.36)
i(2)a (�a + �a) = i(4)b (�a + �a + �) (A.37)
172

A.7 Ajuste de la tension del condensador
i(2)b (�b + �b) = i
(3)b (�b + �b) (A.38)
i(3)b (�a + �) = i
(4)b (�a + �) (A.39)
i(2)b (�b + �b) = i(4)c (�b + �b + �) (A.40)
i(2)c (�c + �c) = i(3)c (�c + �c) (A.41)
i(3)c (�b + �) = i(4)c (�b + �) (A.42)
i(2)c (�c + �c) = i(4)a (�c + �c � �) (A.43)
A.6 Ajuste de la tension del condensador
Con las simpli�caciones realizadas en el modelo que se muestra en la FiguraA.2.(c), la intensidad que demanda el recti�cador es una función que dependede la tensión del condensador del enlace de continua, supuesta constante. Eneste sentido, para una alimentación e impedancias de conmutación dadas, latensión del enlace de continua establece el punto de funcionamiento del inver-sor. Otra opción más común para �jar el punto de funcionamiento es utilizarla potencia activa que el variador de velocidad está demandando de la red.En este caso la tensión del condensador queda como incógnita junto con losintervalos de conmutación y las constantes de integración. Es necesario, portanto, añadir a las ecuaciones planteadas la restricción de potencia para igualarasí el número de ecuaciones e incógnitas. Dicha ecuación toma las siguientesexpresiones dependiendo de si la alimentación del recti�cador es equilibrada ono:
� Alimentación equilibrada
P =6Udc
2�
�Z �c��
�a+�a
i(3)a d!t+
Z �c+�a��
�c
i(4)a d!t
�(A.44)
� Alimentación desequilibrada
P =3Udc
2�
� Z �c��
�a+�a
i(3)a d!t+
Z �c+�c��
�c��
i(4)a d!t+
+
Z �c
�b+�b
i(3)b d!t+
Z �a+�a+�
�a+�
i(4)b d!t+
+
Z �b+�
�c+�c
i(3)c d!t+
Z �b+�b+�
�b+�
i(4)c d!t
�(A.45)
173

Apéndice A Modelo de la carga no lineal
A.7 Cálculo de los armónicos de intensidad
La resolución de las ecuaciones (A.27)-(A.30) para el caso equilibrado o (A.35)-(A.43) para el desequilibrado proporcionan las constantes necesarias para ladeterminación de las intensidades demandadas por el recti�cador de entradadel variador de velocidad, expresadas en el dominio del tiempo. A partir de di-chas intensidades pueden calcularse los armónicos del vector de Park asociado.Si bien dichos armónicos pueden ser calculados una vez que las intensidades sehan reconstruido en el dominio del tiempo aplicando la transformada rápidade Fourier (FFT), es interesante obtener las expresiones matemáticas de estosarmónicos. De esta forma, el modelo podrá ser utilizado en análisis de armó-nicos en redes eléctricas teniendo en cuenta la interacción existente entre lared y el convertidor, tal y como se realiza en el Capítulo 6, [36], [78]. Una vezdeterminadas las expresiones que proporcionan los armónicos de la intensidad,también es necesario realizar el cálculo de las derivadas de los mismos respectoal módulo y fase de las tensiones de alimentación, en bornas de la inductanciade conmutación, pues se requieren para resolver el problema de interacciónarmónica.
Según puede comprobarse de las ecuaciones (A.8)-(A.22), las intensidadesen cada uno de los periodos está compuesta por un término exponencial, untérmino de continua y un sumatorio que contiene a los armónicos de tensiónconsiderados en el análisis. De esta forma, una expresión general de la inten-sidad de una fase x para un determinado periodo de funcionamiento i es lasiguiente [36]:
i(i)x = Axie�t=�xi +
p2Xk
Ukxi sin(k!t+ �kxi � 'kxi)
Zkxi�BxiUdc (A.46)
Los valores de las constantes Axi, �xi, Ukxi, Zkxi y Bxi se resumen en las tablasA.1 y A.2 para los trece intervalos de funcionamiento que componen un periodode la intensidad. El valor del ángulo de la impedancia 'kxi se puede obtener apartir del valor de Zkxi. Los valores Ukxi y �kxi son los correspondientes a latensión que se especi�ca en dichas tablas.
La intensidad en el dominio de Park puede ser expresada en función de lasintensidades de las fases a y b:
i(t) =
p3 + jp2
ia(t) + jp2ib(t) (A.47)
El armónico k-esimo, Ik, de esta intensidad se puede calcular mediante la
174
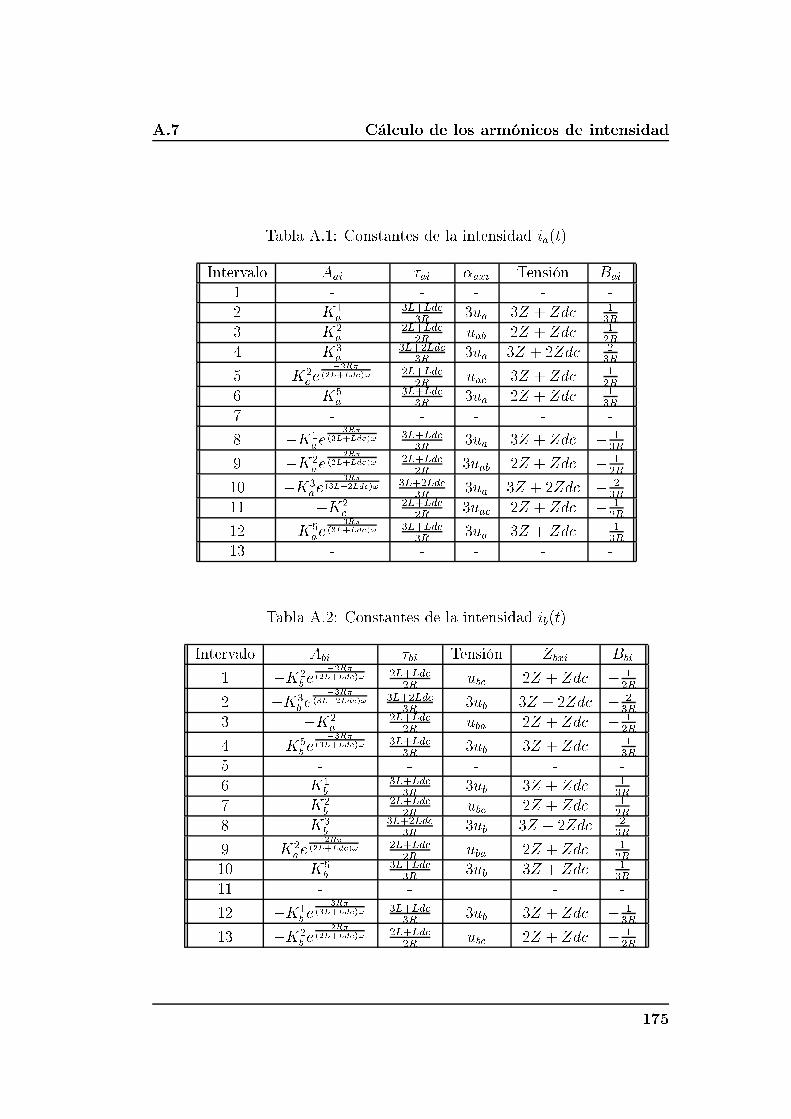
A.7 Cálculo de los armónicos de intensidad
Tabla A.1: Constantes de la intensidad ia(t)
Intervalo Aai �ai �axi Tensión Bai
1 - - - - -2 K1
a3L+Ldc
3R3ua 3Z + Zdc 1
3R
3 K2a
2L+Ldc2R
uab 2Z + Zdc 12R
4 K3a
3L+2Ldc3R
3ua 3Z + 2Zdc 23R
5 K2c e
�2R�(2L+Ldc)! 2L+Ldc
2Ruac 3Z + Zdc 1
2R
6 K5a
3L+Ldc3R
3ua 2Z + Zdc 13R
7 - - - - -
8 �K1ae
3R�(3L+Ldc)! 3L+Ldc
3R3ua 3Z + Zdc � 1
3R
9 �K2ae
2R�(2L+Ldc)! 2L+Ldc
2R3uab 2Z + Zdc � 1
2R
10 �K3ae
3R�(3L+2Ldc)! 3L+2Ldc
3R3ua 3Z + 2Zdc � 2
3R
11 �K2c
2L+Ldc2R
3uac 2Z + Zdc � 12R
12 �K5ae
3R�(3L+Ldc)! 3L+Ldc
3R3ua 3Z + Zdc � 1
3R
13 - - - - -
Tabla A.2: Constantes de la intensidad ib(t)
Intervalo Abi �bi Tensión Zbxi Bbi
1 �K2b e
�2R�(2L+Ldc)! 2L+Ldc
2Rubc 2Z + Zdc � 1
2R
2 �K3b e
�3R�(3L+2Ldc)! 3L+2Ldc
3R3ub 3Z + 2Zdc � 2
3R
3 �K2a
2L+Ldc2R
uba 2Z + Zdc � 12R
4 �K5b e
�3R�(3L+Ldc)! 3L+Ldc
3R3ub 3Z + Zdc � 1
3R
5 - - - - -6 K1
b3L+Ldc
3R3ub 3Z + Zdc 1
3R
7 K2b
2L+Ldc2R
ubc 2Z + Zdc 12R
8 K3b
3L+2Ldc3R
3ub 3Z + 2Zdc 23R
9 K2ae
2R�(2L+Ldc)! 2L+Ldc
2Ruba 2Z + Zdc 1
2R
10 K5b
3L+Ldc3R
3ub 3Z + Zdc 13R
11 - - - -
12 �K1b e
3R�(3L+Ldc)! 3L+Ldc
3R3ub 3Z + Zdc � 1
3R
13 �K2b e
2R�(2L+Ldc)! 2L+Ldc
2Rubc 2Z + Zdc � 1
2R
175

Apéndice A Modelo de la carga no lineal
expresión:
Ik =j
2�
Z 2�
0
i(t)e�jk!td!t =
=�1 + j
p3
2p2�
Z 2�
0
ia(t)e�jk!td!t� 1p
2�
Z 2�
0
ib(t)e�jk!td!t (A.48)
A continuación se detallan los valores de cada una de las integrales que apare-cen en este cálculo de armónicos:
� Término exponencial:
T expxi =
Z 2i
1i
Axie�t=�xie�jk!td!t = � Axi
jk + 1�xi!
e�!t=(jk+�xi)
����� 2i
1i
(A.49)
� Término de continua:
T dcxi =
Z 2i
1i
BxiUdce�jk!td!t = j
BxiUdc
ke�jk!t
���� 2i
1i
(A.50)
� Término senoidal. La solución de esta integral depende del armónicok-esimo que se está calculando y del armónico h-esimo de tensión sobreel que se está realizando la integral:
T hxi =
Z 2i
1i
p2Uk sin(h!t+ �kxi � 'kxi)
Zkxie�jk!td!t (A.51)
� Armónicos del mismo orden:
T hxi = �
p2Uk
Zkxi
�j!t
2ej(�kxi�'kxi) +
1
4ke�j(2k!t+�kxi�'kxi)
� 2i 1i
(A.52)
� Armónicos de distinto orden:
T hxi = �
p2Uk
Zkxie�jk!t
�h
h2 � k2cos(h!t+ �kxi � 'kxi) +
+jk
h2 � k2sen(h!t+ �kxi � 'kxi)
� 2i 1i
(A.53)
176

A.7 Cálculo de los armónicos de intensidad
Obtenidas las expresiones generales de las integrales que aparecen en elcálculo del armónico de intensidad k-esimo, éste se calcula sumando los tér-minos de las ecuaciones (A.49)-(A.53) para todos los intervalos que componenun periodo, para las fases a y b:
Ik =�1 + j
p3
2p2�
Xi
(T expai � T dc
ai +Xh
T hai
)�
� 1p2�
Xi
(T expbi � T dc
bi +Xh
T hbi
)(A.54)
Una vez calculados los armónicos de intensidad, es posible realizar la deri-vada respecto al módulo y argumento de la tensión de alimentación en bornasde las inductancias de conmutación. Estas derivadas, tal y como se ha comen-tado anteriormente, se utilizan a la hora de resolver la interacción armónicaentre la red y el convertidor. Dichas derivadas sólo afectan a los términos T h
xi
de�nidos por las ecuaciones (A.52) y (A.53). Las derivadas de estos términosrespecto a las tensiones armónicas son:
� Derivadas del término T kxi respecto al armónico k-esimo de tensión:
@T kxi
@Uk= �
p2
Zkxi
�j!t
2ej(�kxi�'kxi) +
1
4ke�j(2k!t+�kxi�'kxi)
� 2i 1i
(A.55)
@T kxi
@�k=
p2Uk
Zkxi
�!t
2ej(�kxi�'kxi) +
j
4ke�j(2k!t+�kxi�'kxi)
� 2i 1i
(A.56)
� Derivadas del término T kxi respecto al armónico h-esimo de tensión:
@T kxi
@Uh= �
p2
Zkxie�jk!t
�h
h2 � k2cos(h!t+ �kxi � 'kxi) +
+jk
h2 � k2sen(h!t + �kxi � 'kxi)
� 2i 1i
(A.57)
@T kxi
@�h= �
p2Uk
Zkxie�jk!t
� �hh2 � k2
sen(h!t+ �kxi � 'kxi) +
+jk
h2 � k2cos(h!t+ �kxi � 'kxi)
� 2i 1i
(A.58)
177

Apéndice A Modelo de la carga no lineal
A partir de las derivadas expresadas en (A.55)-(A.58), se pueden calcular laderivada del armónico k-esimo de la intensidad del vector de Park:
@Ik@Uh
=�1 + j
p3
2p2�
Xi
@T kai
@Uh� 1p
2�
Xi
@T kbi
@Uh(A.59)
@Ik@�h
=�1 + j
p3
2p2�
Xi
@T kai
@�h� 1p
2�
Xi
@T kbi
@�h(A.60)
A.8 Validación experimental del modelo
Para proceder a la validación del modelo se utiliza un variador de velocidadde 15 kVA y 380 V según el esquema de montaje de la Figura A.1, con elgenerador suministrando 3.5 kW. Los valores de impedancias de alimentación,así como el valor de la inductancia de continua se re�ejan en la Tabla A.3.
Tabla A.3: Impedancias utilizadas.
Impedancia Valor ( a 50 Hz)Alimentación 0.137+j0.659Continua j0.314
La tensión de alimentación utilizada es la disponible en la red de bajatensión. Dicha tensión presenta un desequilibrio en el fundamental, además deuna acusada presencia de quinto armónico. Dichos armónicos, se resumen enla Tabla A.4. En estas condiciones de funcionamiento, la potencia absorbidapor el variador de velocidad es de 4.5 kW. La representación temporal de lastensiones de fase y su descomposición de Fourier, en porcentaje respecto alfundamental, se muestran en la Figura A.11.
Mediante la aplicación del modelo se obtienen los valores para las constantesde integración Ka, Kb, Kc, ángulos de inicio de conducción �a, �b, �c, ángulosde conmutación �a, �b, �c y tensión del condensador Udc, resumidos en laTabla A.5.
En la Figura A.12 se muestran las intensidades absorbidas por el variadorde velocidad calculadas mediante el modelo, con las constantes re�ejadas enla Tabla A.5. Claramente se puede comprobar el efecto del desequilibrio delas tensiones en la desigualdad de la amplitud de los dos pulsos de intensidadde cada una de las fases. También se identi�can con facilidad los periodos deconmutación.
178
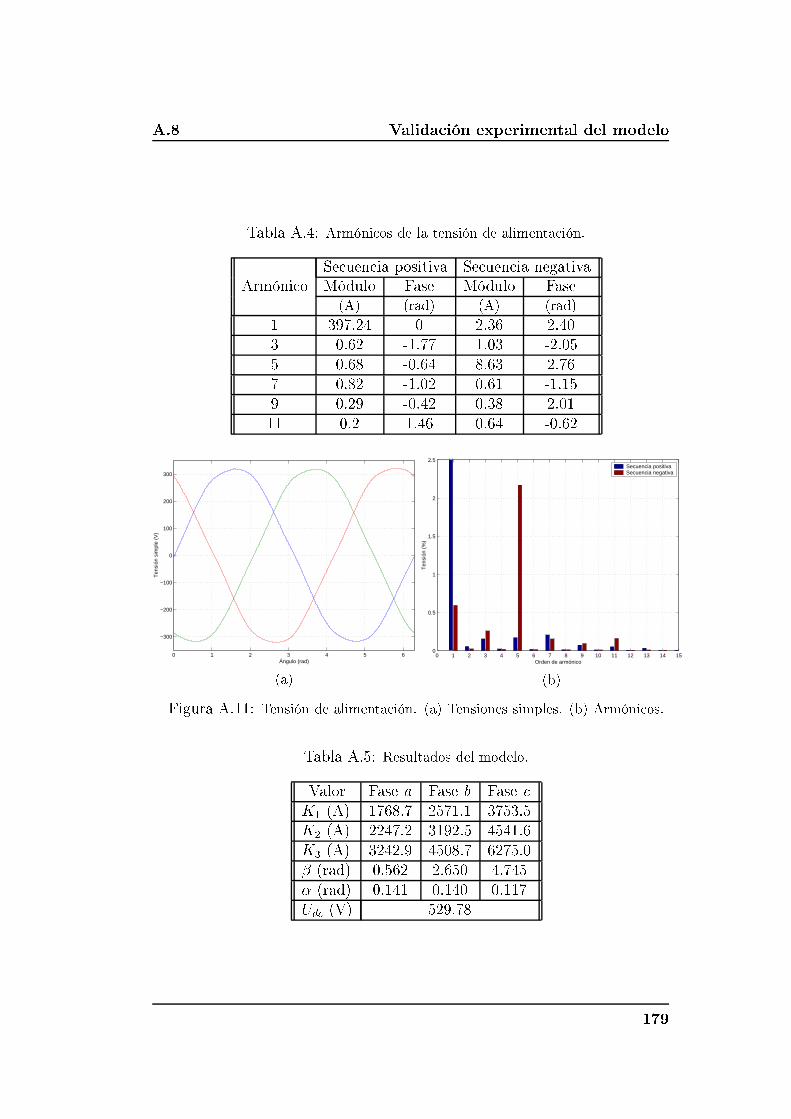
A.8 Validación experimental del modelo
Tabla A.4: Armónicos de la tensión de alimentación.
Secuencia positiva Secuencia negativaArmónico Módulo Fase Módulo Fase
(A) (rad) (A) (rad)
1 397.24 0 2.36 2.403 0.62 -1.77 1.03 -2.055 0.68 -0.64 8.63 2.767 0.82 -1.02 0.61 -1.159 0.29 -0.42 0.38 2.0111 0.2 1.46 0.64 -0.62
0 1 2 3 4 5 6
−300
−200
−100
0
100
200
300
Ángulo (rad)
Ten
sión
sim
ple
(V)
(a)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
0.5
1
1.5
2
2.5
Orden de armónico
Ten
sión
(%
)
Secuencia positivaSecuencia negativa
(b)
Figura A.11: Tensión de alimentación. (a) Tensiones simples. (b) Armónicos.
Tabla A.5: Resultados del modelo.
Valor Fase a Fase b Fase cK1 (A) 1768.7 2571.1 3753.5K2 (A) 2247.2 3192.5 4541.6K3 (A) 3242.9 4508.7 6275.0� (rad) 0.562 2.650 4.745� (rad) 0.141 0.140 0.117Udc (V) 529.78
179
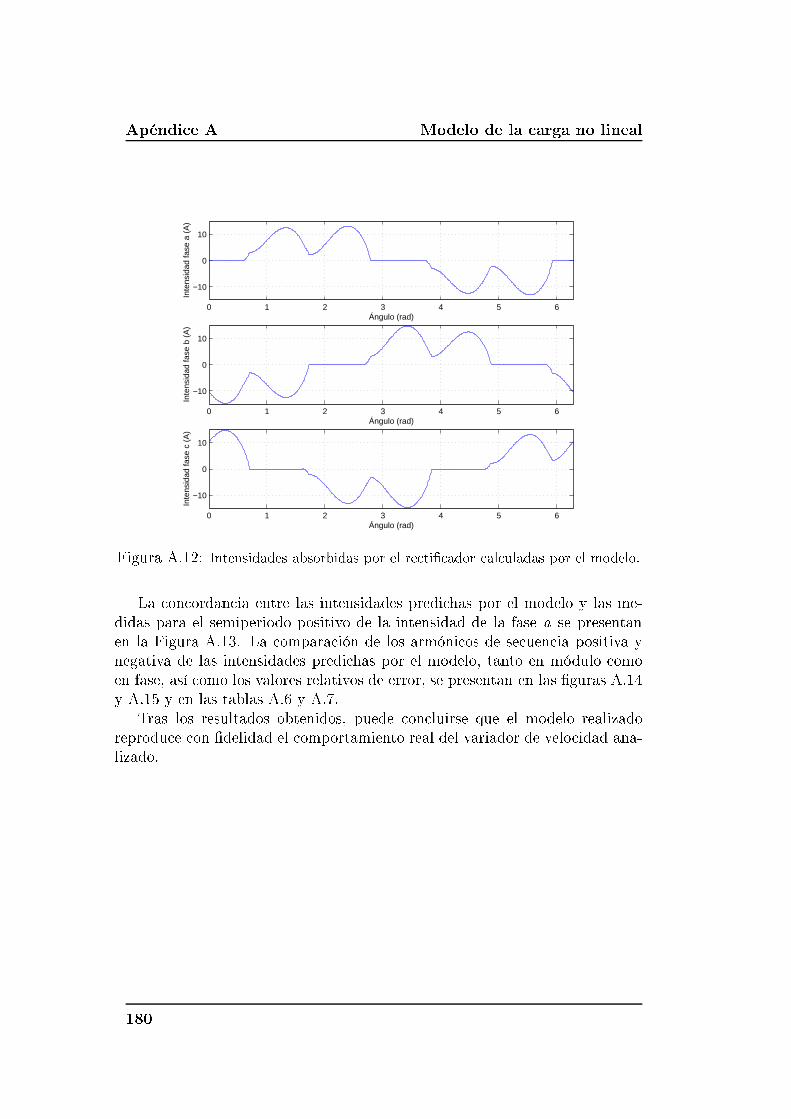
Apéndice A Modelo de la carga no lineal
0 1 2 3 4 5 6
−10
0
10
Ángulo (rad)
Inte
nsid
ad fa
se a
(A
)
0 1 2 3 4 5 6
−10
0
10
Ángulo (rad)
Inte
nsid
ad fa
se b
(A
)
0 1 2 3 4 5 6
−10
0
10
Ángulo (rad)
Inte
nsid
ad fa
se c
(A
)
Figura A.12: Intensidades absorbidas por el recti�cador calculadas por el modelo.
La concordancia entre las intensidades predichas por el modelo y las me-didas para el semiperiodo positivo de la intensidad de la fase a se presentanen la Figura A.13. La comparación de los armónicos de secuencia positiva ynegativa de las intensidades predichas por el modelo, tanto en módulo comoen fase, así como los valores relativos de error, se presentan en las �guras A.14y A.15 y en las tablas A.6 y A.7.
Tras los resultados obtenidos, puede concluirse que el modelo realizadoreproduce con �delidad el comportamiento real del variador de velocidad ana-lizado.
180
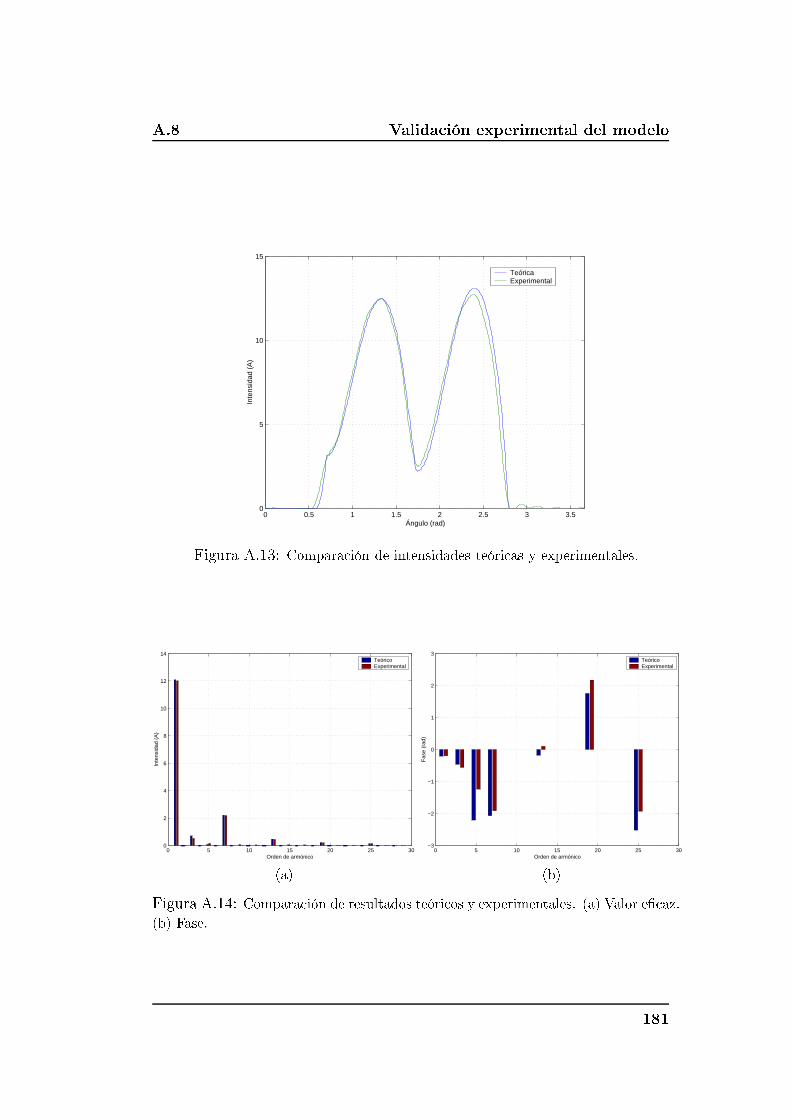
A.8 Validación experimental del modelo
0 0.5 1 1.5 2 2.5 3 3.50
5
10
15
Ángulo (rad)
Inte
nsid
ad (
A)
Teórica Experimental
Figura A.13: Comparación de intensidades teóricas y experimentales.
0 5 10 15 20 25 300
2
4
6
8
10
12
14
Orden de armónico
Inte
nsid
ad (
A)
Teórico Experimental
(a)
0 5 10 15 20 25 30−3
−2
−1
0
1
2
3
Orden de armónico
Fas
e (r
ad)
Teórico Experimental
(b)
Figura A.14: Comparación de resultados teóricos y experimentales. (a) Valor e�caz.
(b) Fase.
181
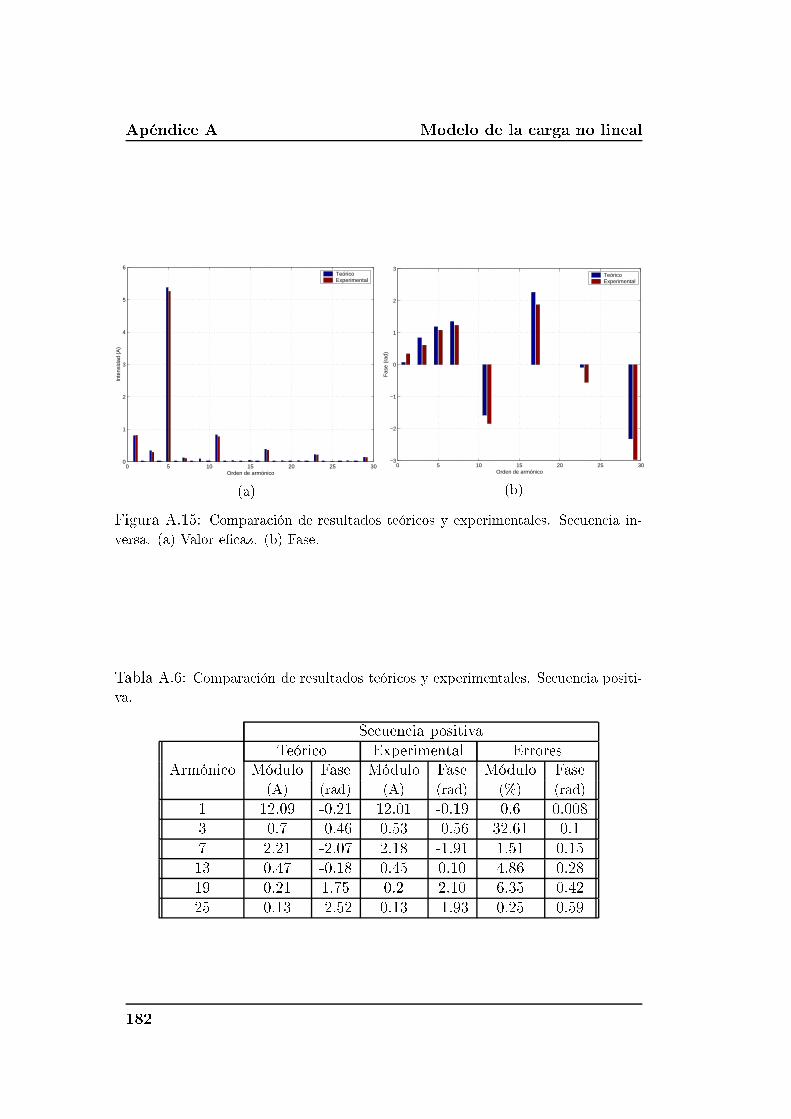
Apéndice A Modelo de la carga no lineal
0 5 10 15 20 25 300
1
2
3
4
5
6
Orden de armónico
Inte
nsid
ad (
A)
Teórico Experimental
(a)
0 5 10 15 20 25 30−3
−2
−1
0
1
2
3
Orden de armónico
Fas
e (r
ad)
Teórico Experimental
(b)
Figura A.15: Comparación de resultados teóricos y experimentales. Secuencia in-
versa. (a) Valor e�caz. (b) Fase.
Tabla A.6: Comparación de resultados teóricos y experimentales. Secuencia positi-
va.
Secuencia positivaTeórico Experimental Errores
Armónico Módulo Fase Módulo Fase Módulo Fase(A) (rad) (A) (rad) (%) (rad)
1 12.09 -0.21 12.01 -0.19 0.6 0.0083 0.7 -0.46 0.53 -0.56 32.61 0.17 2.21 -2.07 2.18 -1.91 1.51 0.1513 0.47 -0.18 0.45 0.10 4.86 0.2819 0.21 1.75 0.2 2.10 6.35 0.4225 0.13 -2.52 0.13 -1.93 0.25 0.59
182
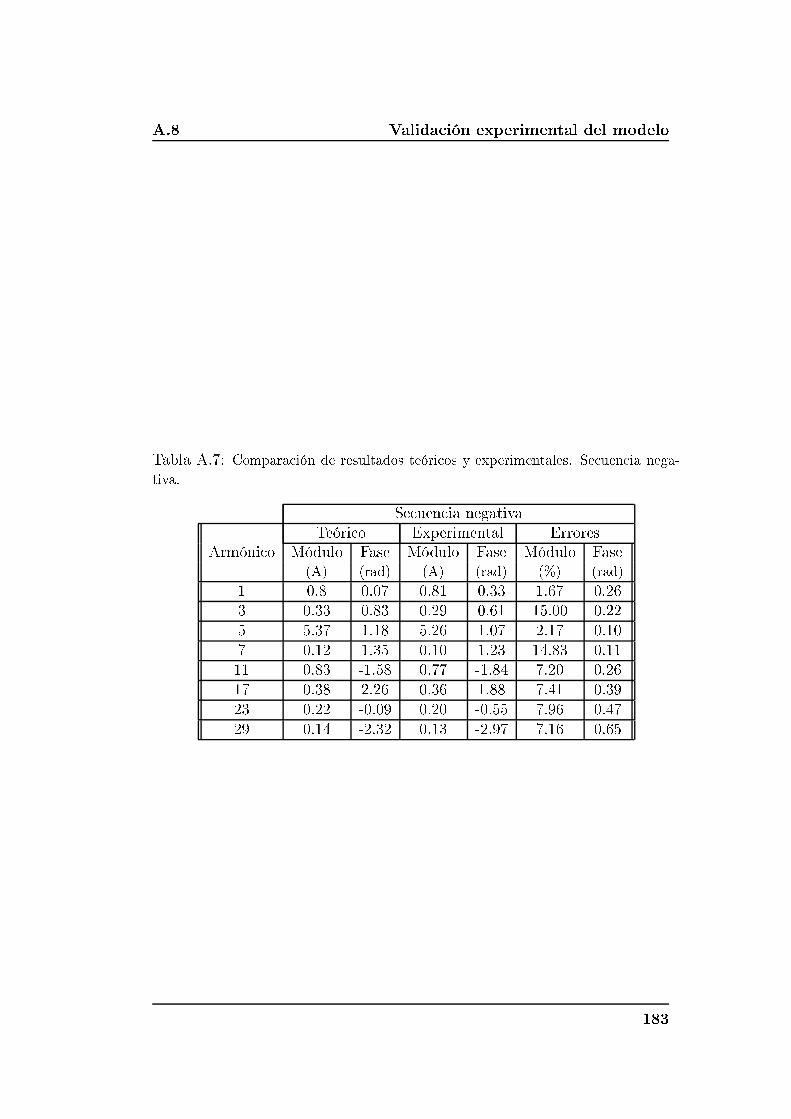
A.8 Validación experimental del modelo
Tabla A.7: Comparación de resultados teóricos y experimentales. Secuencia nega-
tiva.
Secuencia negativaTeórico Experimental Errores
Armónico Módulo Fase Módulo Fase Módulo Fase(A) (rad) (A) (rad) (%) (rad)
1 0.8 0.07 0.81 0.33 1.67 0.263 0.33 0.83 0.29 0.61 15.00 0.225 5.37 1.18 5.26 1.07 2.17 0.107 0.12 1.35 0.10 1.23 14.83 0.1111 0.83 -1.58 0.77 -1.84 7.20 0.2617 0.38 2.26 0.36 1.88 7.41 0.3923 0.22 -0.09 0.20 -0.55 7.96 0.4729 0.14 -2.32 0.13 -2.97 7.16 0.65
183

Apéndice A Modelo de la carga no lineal
184
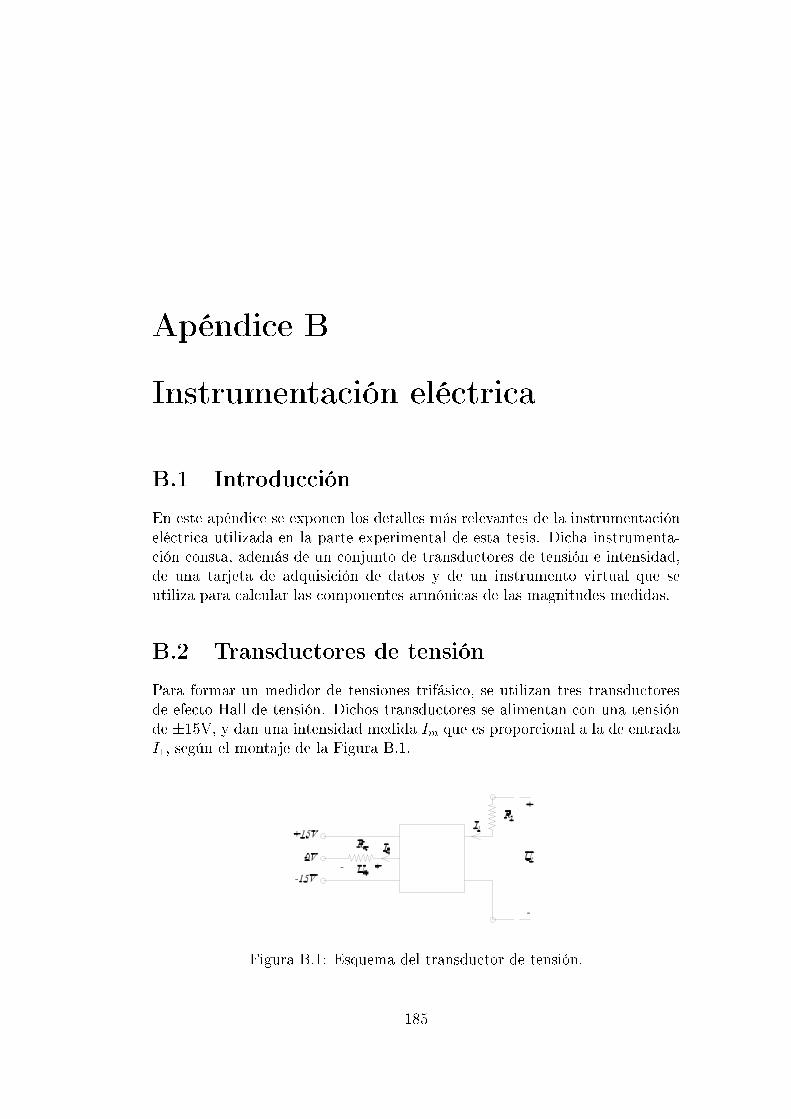
Apéndice B
Instrumentación eléctrica
B.1 Introducción
En este apéndice se exponen los detalles más relevantes de la instrumentacióneléctrica utilizada en la parte experimental de esta tesis. Dicha instrumenta-ción consta, además de un conjunto de transductores de tensión e intensidad,de una tarjeta de adquisición de datos y de un instrumento virtual que seutiliza para calcular las componentes armónicas de las magnitudes medidas.
B.2 Transductores de tensión
Para formar un medidor de tensiones trifásico, se utilizan tres transductoresde efecto Hall de tensión. Dichos transductores se alimentan con una tensiónde �15V, y dan una intensidad medida Im que es proporcional a la de entradaI1, según el montaje de la Figura B.1.
Figura B.1: Esquema del transductor de tensión.
185

Apéndice B Instrumentación eléctrica
Tabla B.1: Especi�caciones técnicas de los transductores de tensión.
Intensidad PrecisiónPrimaria (mA) Secundaria (mA) (%)
10 25 �:6Alimentación Aislamiento Temperatura
(V) (kV RMS/50Hz/1') (0C)�15 2.5 0-70
Las especi�caciones técnicas del transductor se muestran en la Tabla B.1.El cálculo de la resistencia de entrada R1 se realiza para que la intensidad
de entrada al transductor esté lo más cercana posible a la intensidad nominal,ya que en estas circunstancias presenta la máxima precisión. Dado que seestá interesado en medir tanto las tensiones simples como compuestas con lamáxima precisión, se diseñan dos resistencias que se conmutarán mediante unrelé en función de la medida que se esté interesado en realizar. Los valores dela resistencia R1 son 22k para la medida de las tensiones simples y 37:7kpara las de línea.
En cuanto a la resistencia de medida, esta tiene que estar comprendidaentre 100 y 350 cuando en el primario del transductor se trabaja con laintensidad nominal. El valor que se ha tomado para esta resistencia es de120, por lo que la tensión de salida en función de la de entrada toma lossiguientes valores:
� Tensiones simples:
Us =25
10
U1
R1Rm = 1:36 � 10�2U1 (B.1)
� Tensiones compuestas:
Us =25
10
U1
R1Rm = 7:95 � 10�3U1 (B.2)
Para una red de 380/220V, se tienen como tensiones de salida 3V, dentro delos márgenes de tensión permitidos por la tarjeta de adquisición de datos. Poreste motivo, se conectará directamente la salida de los transductores de tensióna esta tarjeta.
186
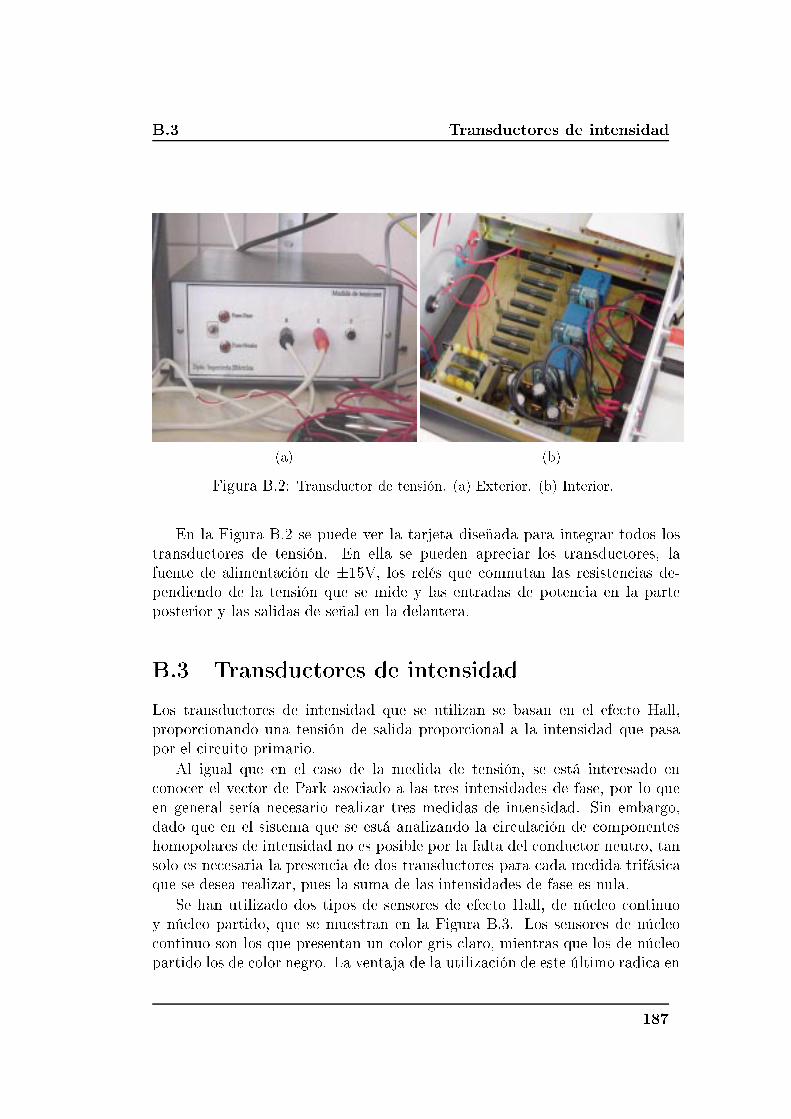
B.3 Transductores de intensidad
(a) (b)
Figura B.2: Transductor de tensión. (a) Exterior. (b) Interior.
En la Figura B.2 se puede ver la tarjeta diseñada para integrar todos lostransductores de tensión. En ella se pueden apreciar los transductores, lafuente de alimentación de �15V, los relés que conmutan las resistencias de-pendiendo de la tensión que se mide y las entradas de potencia en la parteposterior y las salidas de señal en la delantera.
B.3 Transductores de intensidad
Los transductores de intensidad que se utilizan se basan en el efecto Hall,proporcionando una tensión de salida proporcional a la intensidad que pasapor el circuito primario.
Al igual que en el caso de la medida de tensión, se está interesado enconocer el vector de Park asociado a las tres intensidades de fase, por lo queen general sería necesario realizar tres medidas de intensidad. Sin embargo,dado que en el sistema que se está analizando la circulación de componenteshomopolares de intensidad no es posible por la falta del conductor neutro, tansolo es necesaria la presencia de dos transductores para cada medida trifásicaque se desea realizar, pues la suma de las intensidades de fase es nula.
Se han utilizado dos tipos de sensores de efecto Hall, de núcleo continuoy núcleo partido, que se muestran en la Figura B.3. Los sensores de núcleocontinuo son los que presentan un color gris claro, mientras que los de núcleopartido los de color negro. La ventaja de la utilización de este último radica en
187
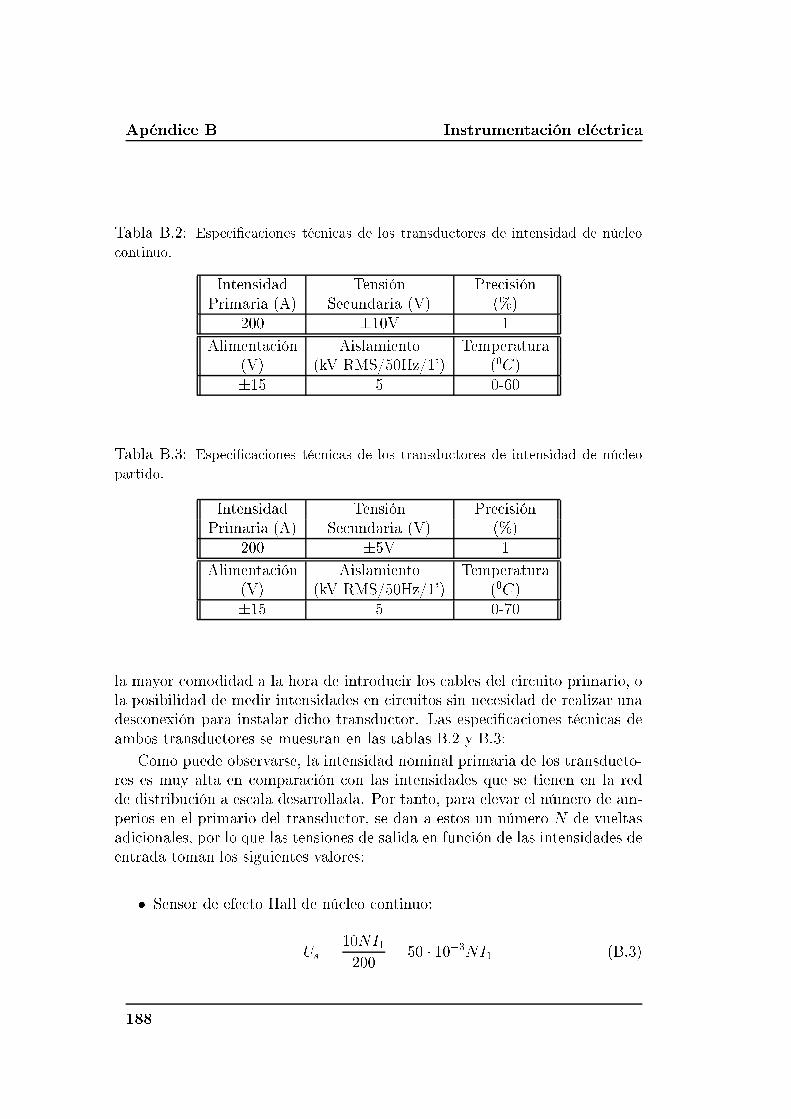
Apéndice B Instrumentación eléctrica
Tabla B.2: Especi�caciones técnicas de los transductores de intensidad de núcleo
continuo.
Intensidad Tensión PrecisiónPrimaria (A) Secundaria (V) (%)
200 �10V 1
Alimentación Aislamiento Temperatura(V) (kV RMS/50Hz/1') (0C)�15 5 0-60
Tabla B.3: Especi�caciones técnicas de los transductores de intensidad de núcleo
partido.
Intensidad Tensión PrecisiónPrimaria (A) Secundaria (V) (%)
200 �5V 1
Alimentación Aislamiento Temperatura(V) (kV RMS/50Hz/1') (0C)�15 5 0-70
la mayor comodidad a la hora de introducir los cables del circuito primario, ola posibilidad de medir intensidades en circuitos sin necesidad de realizar unadesconexión para instalar dicho transductor. Las especi�caciones técnicas deambos transductores se muestran en las tablas B.2 y B.3:
Como puede observarse, la intensidad nominal primaria de los transducto-res es muy alta en comparación con las intensidades que se tienen en la redde distribución a escala desarrollada. Por tanto, para elevar el número de am-perios en el primario del transductor, se dan a estos un número N de vueltasadicionales, por lo que las tensiones de salida en función de las intensidades deentrada toman los siguientes valores:
� Sensor de efecto Hall de núcleo continuo:
Us =10NI1200
= 50 � 10�3NI1 (B.3)
188
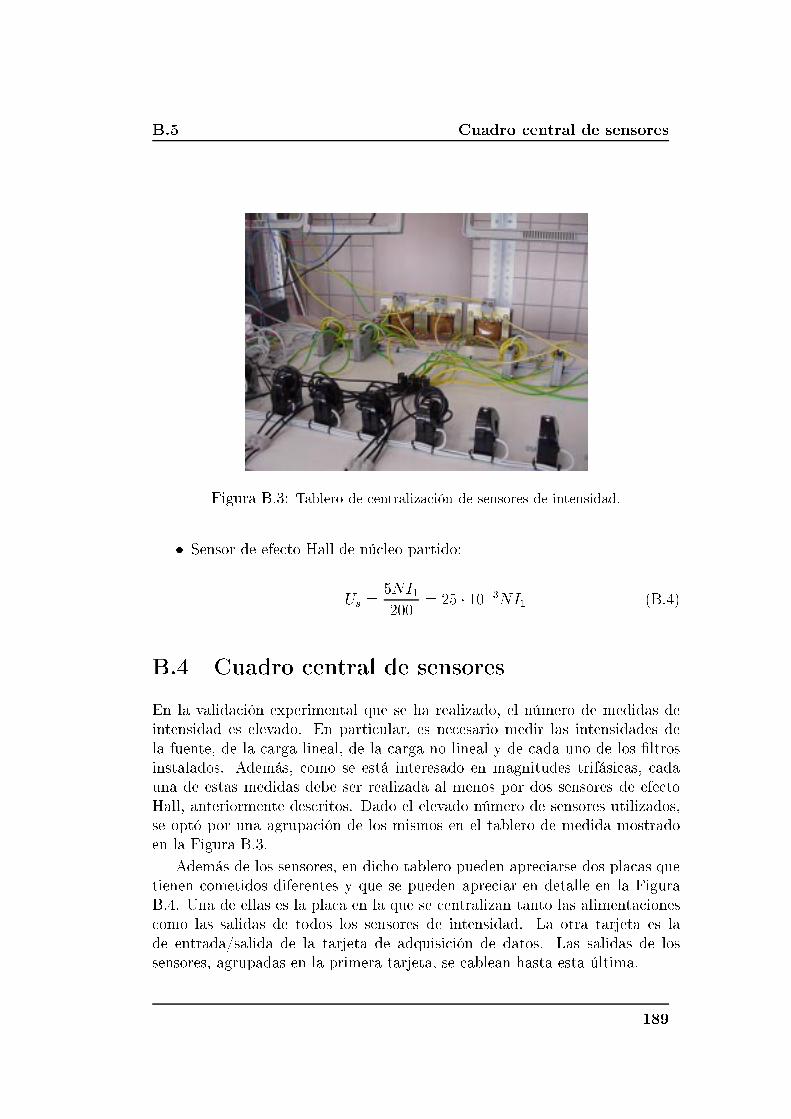
B.5 Cuadro central de sensores
Figura B.3: Tablero de centralización de sensores de intensidad.
� Sensor de efecto Hall de núcleo partido:
Us =5NI1200
= 25 � 10�3NI1 (B.4)
B.4 Cuadro central de sensores
En la validación experimental que se ha realizado, el número de medidas deintensidad es elevado. En particular, es necesario medir las intensidades dela fuente, de la carga lineal, de la carga no lineal y de cada uno de los �ltrosinstalados. Además, como se está interesado en magnitudes trifásicas, cadauna de estas medidas debe ser realizada al menos por dos sensores de efectoHall, anteriormente descritos. Dado el elevado número de sensores utilizados,se optó por una agrupación de los mismos en el tablero de medida mostradoen la Figura B.3.
Además de los sensores, en dicho tablero pueden apreciarse dos placas quetienen cometidos diferentes y que se pueden apreciar en detalle en la FiguraB.4. Una de ellas es la placa en la que se centralizan tanto las alimentacionescomo las salidas de todos los sensores de intensidad. La otra tarjeta es lade entrada/salida de la tarjeta de adquisición de datos. Las salidas de lossensores, agrupadas en la primera tarjeta, se cablean hasta esta última.
189
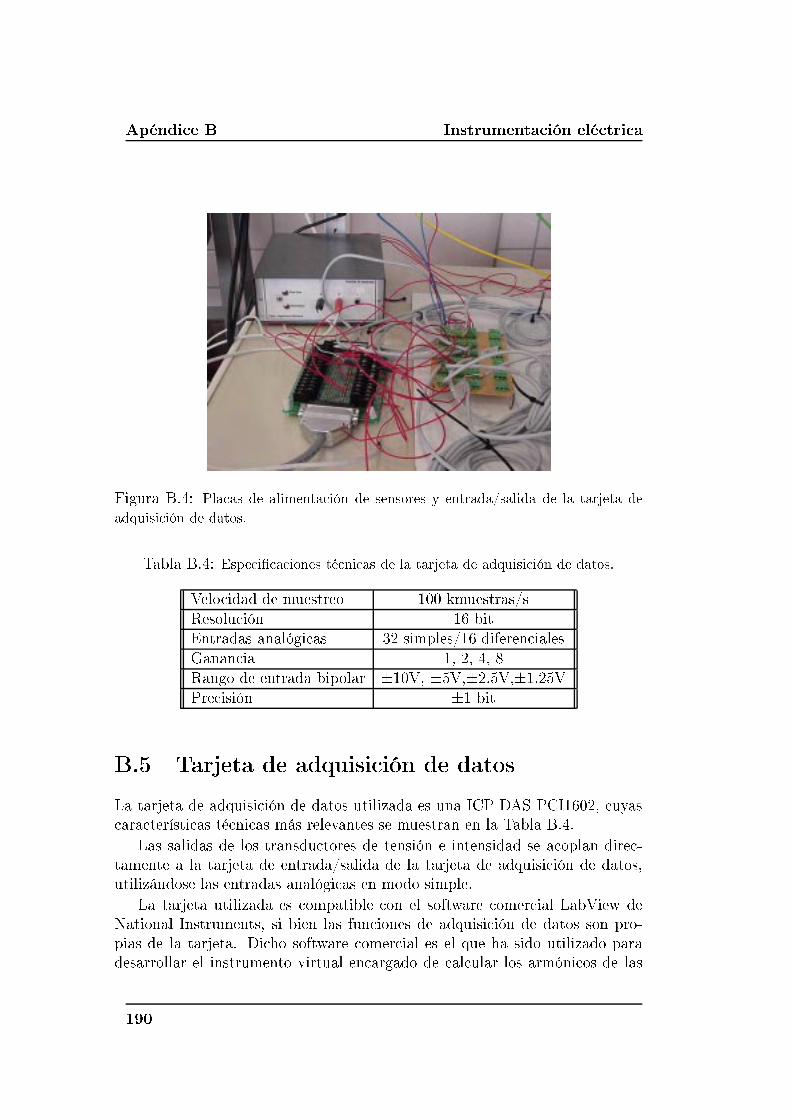
Apéndice B Instrumentación eléctrica
Figura B.4: Placas de alimentación de sensores y entrada/salida de la tarjeta de
adquisición de datos.
Tabla B.4: Especi�caciones técnicas de la tarjeta de adquisición de datos.
Velocidad de muestreo 100 kmuestras/sResolución 16 bitEntradas analógicas 32 simples/16 diferencialesGanancia 1, 2, 4, 8Rango de entrada bipolar �10V, �5V,�2:5V,�1:25VPrecisión �1 bit
B.5 Tarjeta de adquisición de datos
La tarjeta de adquisición de datos utilizada es una ICP-DAS PCI1602, cuyascaracterísticas técnicas más relevantes se muestran en la Tabla B.4.
Las salidas de los transductores de tensión e intensidad se acoplan direc-tamente a la tarjeta de entrada/salida de la tarjeta de adquisición de datos,utilizándose las entradas analógicas en modo simple.
La tarjeta utilizada es compatible con el software comercial LabView deNational Instruments, si bien las funciones de adquisición de datos son pro-pias de la tarjeta. Dicho software comercial es el que ha sido utilizado paradesarrollar el instrumento virtual encargado de calcular los armónicos de las
190
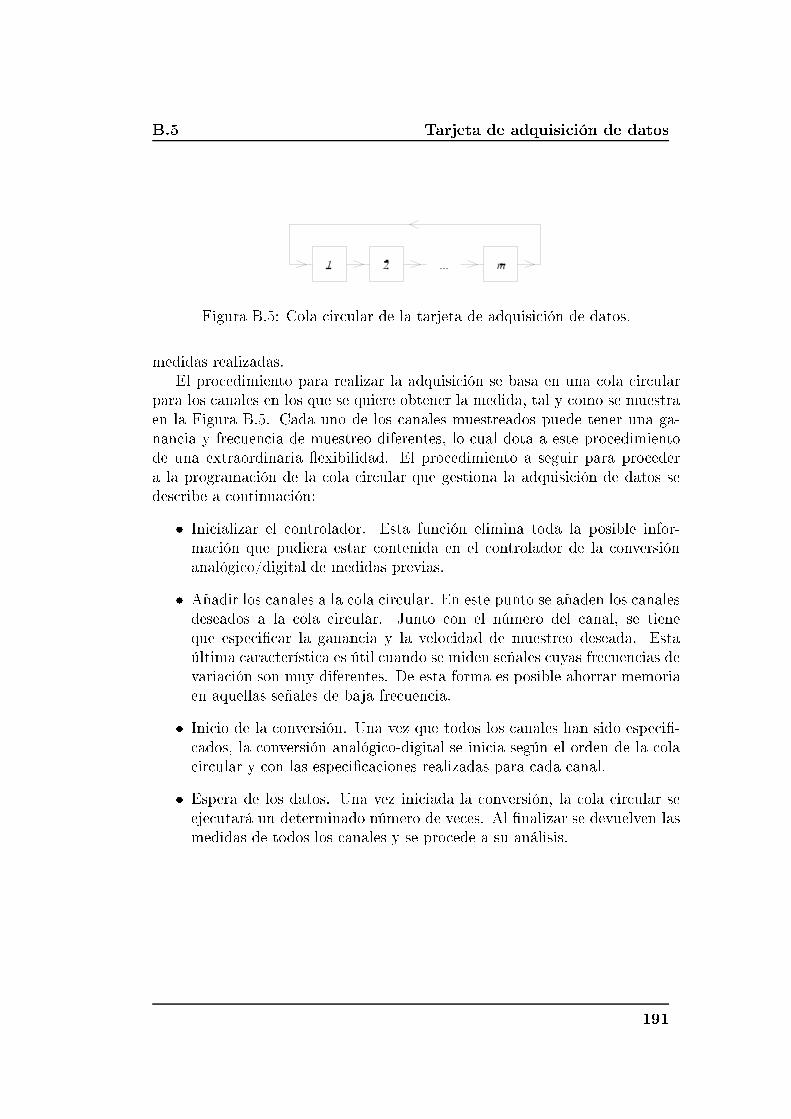
B.5 Tarjeta de adquisición de datos
Figura B.5: Cola circular de la tarjeta de adquisición de datos.
medidas realizadas.El procedimiento para realizar la adquisición se basa en una cola circular
para los canales en los que se quiere obtener la medida, tal y como se muestraen la Figura B.5. Cada uno de los canales muestreados puede tener una ga-nancia y frecuencia de muestreo diferentes, lo cual dota a este procedimientode una extraordinaria �exibilidad. El procedimiento a seguir para procedera la programación de la cola circular que gestiona la adquisición de datos sedescribe a continuación:
� Inicializar el controlador. Esta función elimina toda la posible infor-mación que pudiera estar contenida en el controlador de la conversiónanalógico/digital de medidas previas.
� Añadir los canales a la cola circular. En este punto se añaden los canalesdeseados a la cola circular. Junto con el número del canal, se tieneque especi�car la ganancia y la velocidad de muestreo deseada. Estaúltima característica es útil cuando se miden señales cuyas frecuencias devariación son muy diferentes. De esta forma es posible ahorrar memoriaen aquellas señales de baja frecuencia.
� Inicio de la conversión. Una vez que todos los canales han sido especi�-cados, la conversión analógico-digital se inicia según el orden de la colacircular y con las especi�caciones realizadas para cada canal.
� Espera de los datos. Una vez iniciada la conversión, la cola circular seejecutará un determinado número de veces. Al �nalizar se devuelven lasmedidas de todos los canales y se procede a su análisis.
191

Apéndice B Instrumentación eléctrica
B.6 Descripción del instrumento virtual
El objetivo primordial del instrumento virtual desarrollado es el cálculo delos armónicos de las señales temporales de tensión e intensidad que se miden.Dicho instrumento, programado en LabView, gestiona un proceso que abarcadesde la adquisición de datos hasta la salida a �chero de los resultados deseados.
Inicialmente se procede a la adquisición de datos, para luego ir a un tra-tamiento de los mismos que incluye la transformación al dominio de Park, larealización de la transformada de Fourier en el dominio complejo y la salida a�chero. También se indican los puntos en los cuales es posible realizar una re-presentación grá�ca en pantalla de los medidas realizadas: dominio del tiempo,Park y frecuencia. A continuación se describen cada uno de estas etapas:
� Adquisición de datos. Se utiliza la cola circular que se describió en lasección anterior. En este paso es importante conocer la frecuencia demuestreo con la que se van a tomar las medidas. Dicha frecuencia esfunción tanto del número máximo de canales que se van a medir comodel armónico más alto en el que se está interesado. En principio y paracumplir el teorema del muestreo de Shannon, es necesario muestrearal menos al doble de la frecuencia del máximo armónico que se deseacalcular [84]. Una vez obtenida esa frecuencia, si se multiplica por elnúmero de canales que se quieren medir, se obtiene la frecuencia mínimade muestreo.
Para todas las medidas, se toma una ventana rectangular de 10 ciclos deperiodo. El uso de este tipo de ventanas puede falsear la medida si elpunto inicial y �nal de la misma no coinciden [84], pudiendo producirsedispersión en la medida de los armónicos. Para prevenir este problema,que sucede siempre y cuando la forma de onda no se adapte al tamañode ventana que se adquiere para aplicar la transformada de Fourier, esposible utilizar ventanas que quitan peso a los valores cercanos a su �naly origen, como las de Hanning y Hamming [84], [76], [51].
Por otra parte, es importante tener en cuenta que al muestrear más deun canal, las medidas no se toman en el mismo periodo de tiempo, sinoque existe un pequeño desfase entre ellas, sirva de ejemplo la Figura B.6.En ella se puede ver el muestreo simultáneo de dos canales. La muestra kdel canal 1 no coincide en el tiempo con la misma muestra del canal 2. Seha comprobado que esa pequeña diferencia de tiempo tiene importanciaa la hora de calcular los armónicos de una señal, pues no debe olvidarseque para el cálculo de los armónicos se necesitan al menos dos medidas
192

B.6 Descripción del instrumento virtual
Figura B.6: Muestreo simultáneo de dos canales.
Figura B.7: Muestreo simultáneo de m canales. Referencia de todas las mues-tras al mismo punto.
para conformar el vector de Park. Para evitar los posibles errores que sederivan de del muestreo simultáneo de varios canales, una vez �nalizadala conversión analógico-digital y obtenidas las medidas, se procede aun postprocesado de las mismas. El procedimiento consiste en obtenerlas medidas de todos los canales para un mismo instante de tiempo.Para ello, y basándose en que el intervalo de tiempo entre muestras esrelativamente pequeño, se puede considerar una aproximación lineal entredos muestras consecutivas. En la Figura B.7 se presentan dos muestrasconsecutivas de un grupo de m medidas. Si x(k)i es la muestra originalk de la medida i y Tm es el periodo de muestreo, se llega a la siguienteexpresión para la muestra modi�cada referida al �nal del intervalo x(k)�i :
x(k)�i = x
(k)i +
x(k+1)i � x
(k)i
Tm� m� i
mTm (B.5)
� Transformación al dominio de Park. Una vez referidas todas las medi-das al mismo instante de tiempo, se transforman al dominio de Park,
193

Apéndice B Instrumentación eléctrica
mediante la aplicación de la siguiente ecuación:
ydq = Tyabc (B.6)
donde T es la matriz:
T =
24q
23�q
16�q
16
0q
12�q
12
35 (B.7)
� Transformada compleja de Fourier. Obtenidas las magnitudes en el do-minio de Park, se procede a aplicar la transformada compleja de Fourier.Esta función está disponible para su uso con LabView, no siendo ne-cesario programarla. La salida de la función es un vector de númeroscomplejos que coinciden con los armónicos de la señal de entrada. Si elvector de entrada tiene N valores, el de salida tiene el mismo número.Los N=2 primeros corresponden a los componentes de secuencia positivade los N=2 primeros armónicos, mientras que los N=2 restantes son elconjugado de la secuencia negativa de dichos armónicos.
Por otra parte, en el proceso de adquisición de datos, no se impone nin-guna condición a partir de la cual se tiene que comenzar la medida. Eneste sentido, si bien la amplitud de los armónicos se mantiene constantepara medidas sucesivas, ya que se está en régimen permanente, no ocurreasí con la fase. Para ello, una vez realizada la transformada de Fourier,se toma como origen de fases el primer armónico de la tensión del siste-ma. De esta forma, para referir los armónicos de todas las magnitudesmedidas a este nuevo origen se utiliza la expresión:
X�k =Xke
�jk�u (B.8)
donde �u es el ángulo original del primer armónico de la tensión delsistema, Xk es el armónico k-esimo del vector de Park x, y X�
k es elvector modi�cado tras el cambio a la nueva referencia.
� Representación grá�ca. Una vez que se han calculado los armónicos, seprocede a realizar una representación grá�ca de las magnitudes en losdiferentes dominios: fases, Park y frecuencia. La Figura B.8 muestradicha representación. En la parte superior izquierda se puede apreciarlas intensidades en cada una de las fases respecto al tiempo; en la partesuperior derecha se tienen las tensiones en cada una de las fases. En
194
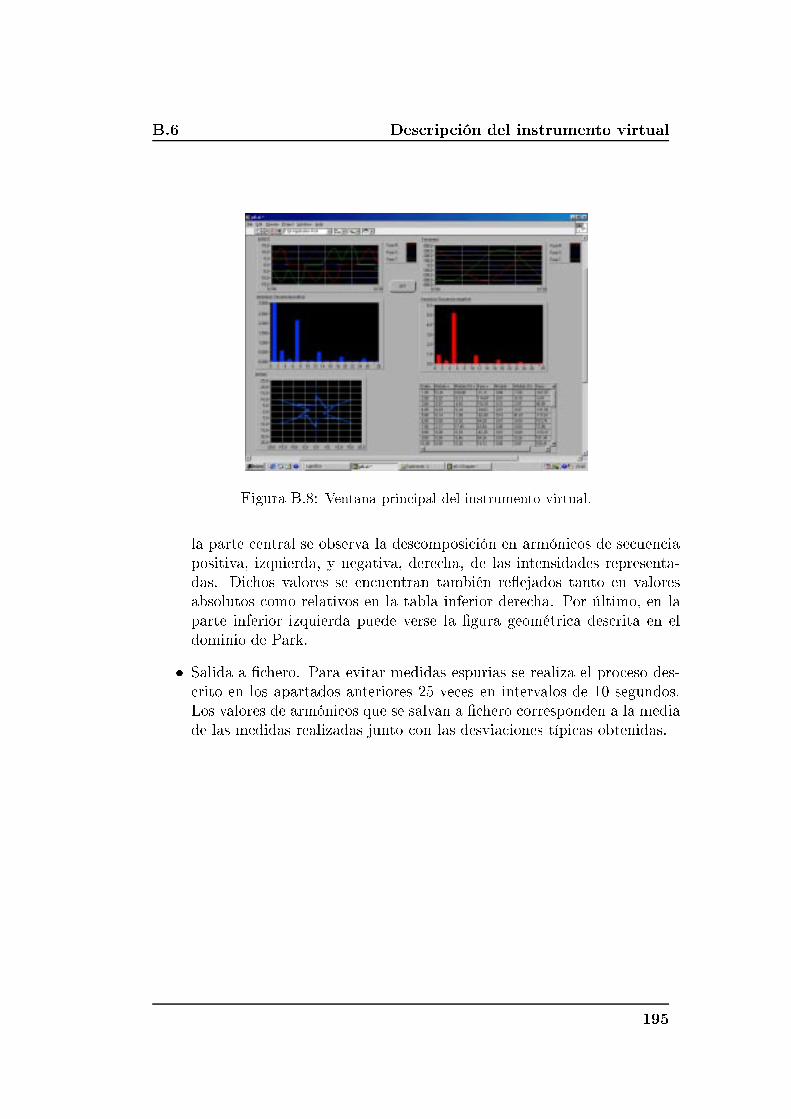
B.6 Descripción del instrumento virtual
Figura B.8: Ventana principal del instrumento virtual.
la parte central se observa la descomposición en armónicos de secuenciapositiva, izquierda, y negativa, derecha, de las intensidades representa-das. Dichos valores se encuentran también re�ejados tanto en valoresabsolutos como relativos en la tabla inferior derecha. Por último, en laparte inferior izquierda puede verse la �gura geométrica descrita en eldominio de Park.
� Salida a �chero. Para evitar medidas espurias se realiza el proceso des-crito en los apartados anteriores 25 veces en intervalos de 10 segundos.Los valores de armónicos que se salvan a �chero corresponden a la mediade las medidas realizadas junto con las desviaciones típicas obtenidas.
195
Bibliografía
[1] H. Akagi, Y. Kanazawa, and A. Nabae. Instantaneous reactive powercompensators comprising switching devices without energy storage com-ponents. IEEE Transactions on Industry Applications, IA-20(3):625�630,Mayo/Junio 1984.
[2] H. Akagi, A. Nabae, and S. Atoh. Control strategy of active power �ltersusing multiple voltage-source PWM converters. IEEE Transactions onIndustry Applications, 22(3):460�465, Mayo/Junio 1986.
[3] R.L. Almonte and A.W. Ashley. Harmonics at the utility industrial inter-face: A real world example. IEEE Transactions on Industry Applications,31(6):1419�1426, Noviembre/Diciembre 1995.
[4] D. Andrews, M.T. Bishop, and J.F. Witte. Harmonic measurements,analysis and power factor correction in a modern steel manufacturingfacility. IEEE Transactions on Industry Applications, 32(3):617�624, Ma-yo/Junio 1996.
[5] J. Arrillaga Garmendia and L.I. Eguiluz Morán. Armónicos en Sistemasde Potencia. Servicio de Publicaciones de la Universidad de Cantabria,1994, Santander, 1994.
[6] J. Balda, K. Olejniczak, and C. Wang. Comments on the derating of dis-tribution transformers serving nonlinear loadas. En Second InternationalConference on Power Quality, Atlanta, 1992.
[7] S. Battacharya, D.M. Divan, and B. Banerjee. Synchronous frame har-monic isolator using active series �lter. En EPE, pp. 30�35, 1991.
[8] S. Bhattacharya, T.M. Frank, D.M. Divan, and B. Banerjee. Active �lterimplementation. IEEE Industry Applications Magazine, (3):47�63, Sep-tiembre/Octubre 1998.
197
Bibliografía
[9] G. Blanchon, J.-C. Dodu, A. Renaud, and M. Bouhtou. Implementationof a primal-dual interior-point method applied to the plannig of reactivepower compensation devices. En 12 Power Systems Computation Confe-rence, pp. 827�836, 1996.
[10] C.I. Budeanu. Reactive and �cticius power. Instytut Romain de l'Energie,1927.
[11] M.M. Cameron. Trends in power factor correction with harmonic �ltering.IEEE Transactions on Industry Applications, 29(1):60�65, Enero/Febrero1993.
[12] J.M. Cano, G. Alonso, J. García Mayordomo, R. Asensi, M. Fernández Ca-banas, and M. García Melero. New transfer functions for an accurate esti-mation of harmonic distortion in ac/dc convertrs working under unbalan-ced conditions. IEEE Transactions on Industry Applications, 37(2):642�649, Marzo/Abril 2001.
[13] CENELEC. UNE-EN50160. Características de la Tensión Suministradapor las Redes Generales de Distribución, Enero 2001.
[14] Standardisation Speci�c Committee. Application guide to the europeanstandard EN50160 on voltage characteristics of electricity supplied bypublic distribution systems. Technical report, UNIPEDE, Julio 1995.
[15] L.S. Czarnecki. An orthogonal decomposition of the current of non-sinusoidal voltage sources applied to non-linear loads. International Jour-nal on Circuit Theory and Applications, 11:235�239, 1983.
[16] L.S. Czarnecki. Considerations on the reactive power in nonsinusoidalsituations. IEEE Transactions on Instrumentation and Measurement, IM-34(3):399�404, Septiembre 1985.
[17] L.S. Czarnecki. What is wrong with the Budeanu concept of reactive anddistortion power and why it should be abandoned. IEEE Transactions onInstrumentation and Measurement, IM-36(3):834�837, Septiembre 1987.
[18] L.S. Czarnecki. Orthogonal decomposition of the currents in a 3-phasenonlinear asymmetrical circuit with a nonsinusoidal voltage source. IEEETransactions on Instrumentation and Measurement, 37(1):30�34, Marzo1988.
198

Bibliografía
[19] L.S. Czarnecki. Reactive and unbalanced currents compensation inthree-phase asymmetrical circuits under nonsinusoidal conditions. IEEETransactions on Instrumentation and Measurement, 38(3):754�759, Junio1989.
[20] L.S. Czarnecki. Distortion power in systems with nonsinusoidal voltage.IEE Proceedings-B, 139(3):276�280, Mayo 1992.
[21] L.S. Czarnecki. Common and �xed-poles resonant harmonic �lters. Euro-pean Transactions on Electric Power, 8(5):345�351, Septiembre/Octubre1998.
[22] L.S. Czarnecki. An overview of methods of harmonic suppression in dis-tribution systems. En IEEE 2000 WinterMeeting, 2000.
[23] L.S. Czarnecki and H. Ginn. E�ectiveness of resonant harmonic �ltersand its improvement. En IEEE 2000 WinterMeeting, 2000.
[24] Ministerio de Economía. Real Decreto 1955/2000, por el que se regulanlas actividades de transporte, distribución, comercialización, suministro yprocedimientos de autorización de instalaciones de energía eléctrica, Di-ciembre 2000.
[25] Ministerio de Economía. Real Decreto 3490/2000, por el que se establecela tarifa eléctrica para el año 2001, Diciembre 2000.
[26] D. Dini. Testing and rating of transformer for use with nonlinear loads.En Second International Conference on Power Quality, Atlanta, 1992.
[27] R.G. Dugan, M.F. McGranaghan, and H.W. Beaty. Electrical Power Sys-tem Quality. McGraw-Hill, 1996.
[28] A.E. Emanuel. Powers in Nonsinusoidal Situations: a Review of De�-nitions and Physical Meaning. IEEE Transactions on Power Delivery,5(3):1377�1389, Julio 1990.
[29] A.E. Emanuel. The Oscillatory Nature of the Power in Single- and Polyp-hase Circuits. European Transactions on Electrical Power, 6(5):315�320,Septiembre/Octubre 1996.
[30] Jay F. Standard Dictionary of Electrical and Electronics Terms (FourthEdition). The Institute of Electrical and Electronic Engineers, Inc., 1988.
199
Bibliografía
[31] A. Ferrero and G. Superti-Furga. A new approach to the de�nition ofpower components in three-phase systems under nonsinusoidal conditions.IEEE Transactions on Instrumentation and Measurement, 40(3):568�577,Junio 1991.
[32] P.S. Filipski. Polyphase Apparent Power and Power Factor under Dis-torted Waveform Conditions. IEEE Transactions on Power Delivery,6(3):1161�1165, Julio 1991.
[33] P.S. Filipski, Y. Baghzouz, and M.D. Cox. A Review of Powers accordingto the IEEE Standard Dictionary. IEEE Transactions on Power Delivery,9(3):1237 �1244, Julio 1994.
[34] S. Fryze. Active, reactive and apparent power in circuits with sinusoidalvoltage and current. Part 1. Przegl. Elektrotech., 7:193�203, 1931.
[35] S. Fryze. Active, reactive and apparent power in circuits with sinusoidalvoltage and current. Part 3. Przegl. Elektrotech., 22:673�676, 1932.
[36] J. García Mayordomo. Análisis de los Armónicos Introducidos en la RedesEléctricas por los Convertidores Estáticos de Potencia. Tesis Doctoral, Es-cuela Técnica Superior de Ingenieros Industriales. Universidad Politécnicade Madrid, Julio 1986.
[37] J. García Mayordomo, L.F. Beites, and L. Zabala. A contribution formodeling controlled and uncontrolled ac/dc converters in harmonic power�ows. IEEE Transactions on Power Delivery, 13(4):1501�1508, Octubre1998.
[38] H.L. Ginn. Resonant harmonic �lters: Their optimization and limits ofe�ectiveness. En IEEE 2000 WinterMeeting, 2000.
[39] D.A. Gonzales and J.C. McCall. Design of �lters to reduce harmonicdistortion in industrial power systems. En IEEE 1980 Annual Meeting-Toronto, pp. 361�365, 1980.
[40] S. Granville. Optimal reactive dispatch through interior point methods.IEEE Transactions on Power Systems, 9(1):136�146, Febrero 1994.
[41] IEEE Power Engineering Society Harmonics Working Group. Tutorial onHarmonics Modeling and Simulation, 1998.
200

Bibliografía
[42] L. Gyugyi and E.C. Strycula. Active ac power �lters. En IEEE IndustrialApplications Society Conference Record, pp. 529�535, 1976.
[43] C. Kawann and A.E. Emanuel. Passive shunt harmonic �lters for low andmedium voltage: A cost comparison study. IEEE Transactions on PowerSystems, 11(4):1825�1831, Noviembre 1996.
[44] N.L. Kusters and W.J.M. Moore. On the de�nition of reactive powerunder non-sinusoidal conditions. IEEE Transactions on Power Apparatusand Systems, PAS-99(5):1845�1854, Septiembre/Octubre 1980.
[45] G. Lemieux. Power system harmonic resonance- a documented case. IEEETransactions on Industry Applications, 26(3):483�488, Mayo/Junio 1990.
[46] K.P. Lin, M.H. Lin, and T.P. Lin. An advanced computer code for single-tuned harmonic �lter design. IEEE Transactions on Industry Applica-tions, 34(4):640�648, Julio/Agosto 1998.
[47] A. Ludbrook. Harmonic �lters for notch reduction. IEEE Transactionson Industry Applications, 24(5):947�954, Septiembre/Octubre 1988.
[48] P. Mattavelli. Design aspects of harmonic �lters for high-power ac/dcconverters. En IEEE 2000 WinterMeeting, 2000.
[49] P. Mattavelli and P. Tenti. Load and line identi�cation in multi-phasesystems: A compensation-oriented approach. European Transactions onElectric Power, 6(6):373�380, Noviembre/Diciembre 1996.
[50] P. Mattavelli and P. Tenti. Design aspects of hybrid compensation sys-tems. European Transactions on Electric Power, 8(5):375�381, Septiem-bre/Octubre 1998.
[51] J.M. Maza Ortega. Medida y simulación de la propagación de armóni-cos en los sistemas eléctricos. Proyecto Fin de Carrera, Escuela TécnicaSuperior de Ingenieros. Universidad de Sevilla, Diciembre 1996.
[52] J.M. Maza Ortega, M. Burgos Payán, and C. Izquierdo Mitchell. Powerfactor correction and harmonic mitigaton in industry. En 2000 IEEEIndustry Applications Conference, Roma, 2000.
[53] J.M. Maza Ortega, J.L. Martínez Ramos, M. Burgos Payán, and C. Iz-quierdo Mitchell. Optimization of passive tuned �lters by interior pointmethods. Pendiente de publicación en IEEE Transactions on Power Deli-very.
201
Bibliografía
[54] M.F. McGranaghan and D.R. Mueller. Designing harmonic �lters foradjustable-speed drives to comply with IEEE-519 harmonic limits. IEEETransactions on Industry Applications, 35(2):312�318, Marzo/Abril 1999.
[55] S.J. Merhej and Nichols W.H. Harmonic �ltering for the o�shore industry.IEEE Transactions on Industry Applications, 30(3):533�542, Mayo/Junio1994.
[56] C.H. Page. Reactive power in nonsinusoidal situations. IEEE Transactionson Instrumentation and Measurement, IM-29(5):420�423, Diciembre 1980.
[57] F. Peng. Application issues of active power �lters. IEEE Industry Appli-cations Magazine, pp. 21�30, Septiembre/Octubre 1998.
[58] J.K. Phipps. A transfer function approach to harmonic �lter design. IEEEIndustry Applications Magazine, pp. 68�82, Marzo/Abril 1997.
[59] W.E. Reid. Power quality issues�standards and guidelines. IEEE Tran-sactions on Industry Applications, 32(3):625�632, Mayo/Junio 1996.
[60] P.F. Ribeiro. On the adequacy of ideal current sources as models ofnonlinear loads in harmonic studies. IEEE Power Engineering Review,pp. 50�51, Enero 2000.
[61] J. Schlabbach, G. Seifert, T. Weber, and W. Wellssow. Simulation andmeasurements of harmonic propagation in MV-systems- case studies andmodelling requirements. En 13th Power System Computation Conference,pp. 1070�1076, Trondheim, 1999.
[62] D. Sharon. Reactive power de�nitions and power-factor improvement innonlinear systems. IEE Proceedings, 120(6):704�706, Junio 1973.
[63] D. Sharon. Reactive power de�nitions and power-factor improvement innonlinear systems. IEE Proceedings, 121(5):390�392, Mayo 1974.
[64] D. Sharon. Power factor de�nitions and power transfer quality in nonsi-nusoidal situations. IEEE Transactions on Instrumentation and Measu-rement, 45(3):728�733, Junio 1996.
[65] W. Shepherd and P. Zakhikani. Suggested de�nition of reactive power fornonsinusoidal systems. IEE Proceedings, 119(9):1362, 1972.
202
Bibliografía
[66] W. Shepherd and P. Zakhikani. Suggested de�nition of reactive power fornonsinusoidal systems. Réplica a Micu E. IEE Proceedings, 120(7):796�797, Julio 1973.
[67] W. Shepherd and P. Zakhikani. Reactive power de�nitions and power-factor improvement in nonlinear systems. Réplica a Sharon. IEE Procee-dings, 121(5):390�392, Mayo 1974.
[68] W. Shepherd and P. Zand. Energy Flow and Power Factor in Nonsinu-soidal Circuits. Cambridge University Press, 1979.
[69] B. Singh, K. Al-Haddad, and A. Chandra. A review of active �lters forpower quality improvement. IEEE Transactions on Industrial Electronics,46(5):960�971, Octubre 1999.
[70] M.A. Slonim and J.D. Van Wyk. Power components in a system withsinusoidal and nonsinusoidal voltages and/or currents. IEE Proceedings,135(2):76�84, Marzo 1988.
[71] M.A. Slonim and J.D. Van Wyk. Distortion power in linear and non-linearsystems. International Journal on Electronics, 68(5):769�778, 1990.
[72] V. Soares, P. Verdelho, and G.D. Marques. An instantaneous active andreactive current component method for active �lters. IEEE Transactionson Industrial Electronics, 15(4):660�669, Julio 2000.
[73] IEEE Industry Applications Society and Power Engineering Society. IEEERecommended Practices and Requirements for Harmonic Control in Elec-trical Power Systems, 1993.
[74] D.E. Steeper and R.P. Stratford. Reactive compensation and harmonicsuppression for industrial power systems using thyristor converters. IEEETransactions on Industry Applications, 12(3):232�254, Marzo 1976.
[75] K.H. Sueker, S.D. Hummel, and R.D. Argent. Power factor correction andharmonic mitigation in a thyristor controlled glass melter. IEEE Tran-sactions on Industry Applications, 25(6):972�975, Noviembre/Diciembre1989.
[76] Tektronix. 2630 Fourier Analyzer. User± Guide, 1990.
[77] UNESA. Guía sobre la calidad de onda en las redes eléctricas, 1996.
203
Bibliografía
[78] M. Valcárcel Fontao. Análisis del Régimen Permanente de los SistemasEléctricos de Potencia con Elementos no Lineales mediante un Métodode Reparto de Cargas con Armónicos. Tesis Doctoral, Escuela TécnicaSuperior de Ingenieros Industriales. Universidad Politécnica de Madrid,Julio 1991.
[79] M. Valcárcel Fontao and J. García Mayordomo. Harmonic power �ow forunbalanced systems. IEEE Transactions on Power Delivery, 8(4):2052�2059, Octubre 1993.
[80] P. Verdelho and G.D. Marques. An active power �lter and unbalan-ced current compensator. IEEE Transactions on Industrial Electronics,44(3):321�328, Junio 1997.
[81] S. Wei, H. Sasaki, J. Kubokawa, and R. Yokoyama. An interior pointnonlinear programming for optimal power �ow problems with a novel datastructure. IEEE Transactions on Power Systems, 13(3):870�877, Agosto1998.
[82] S. Wei, H. Sasaki, and R. Yokoyama. An application of interior point qua-dratic programming algorithm to power systems optimization problems.IEEE Transactions on Power Systems, 11(1):260�266, Febrero 1996.
[83] J.L. Willems. A new interpretation of the Akagi-Nabae power componentsfor nonsinusoidal three-phase situations. IEEE Transactions on Instru-mentation and Measurements, 41(4):523�527, Agosto 1992.
[84] R.A. Witte. Spectrum and Network Measurements. Prentice Hall, NewJersey, 1993.
[85] C.-J. Wu, J.-C. Chiang, S.-S. Yen, C.-J. Liao, J.-S Yang, and T.-Y. Guo.Investigation and mitigation of harmonic ampli�cation problems causedby single-tuned �lters. IEEE Transactions on Power Delivery, 13(3):800�806, Julio 1998.
[86] D. Xia and G.T. Heydt. Harmonic power �ow studies. Parts I & II. IEEETransactions on Power Apparatus and Systems, PAS-101(6):1257�1270,Junio 1982.
[87] Amir M.G. Zahedi. Passive Filter Optimization in Distribution Feeders.Tesis Doctoral, Worcester Polytechnic Institute, Julio 1995.
204

Bibliografía
[88] I. Zamora Belver y V. Macho Stadler. Estudio Bibliográ�co sobre Distor-sión Armónica producida por Convertidores Estáticos. Iberdrola, 1997.
205








![Comm unication in Reactiv e Multiagen t Rob otic Systemsmotionplanning/papers/sbp_papers/... · 2007-07-16 · c king the b eha v-ior of a leader rob ot. Noreils [44] describ es co](https://img.pdfslide.us/doc/110x75/5f9e6d57ba38fe468c06376f/comm-unication-in-reactiv-e-multiagen-t-rob-otic-motionplanningpaperssbppapers.jpg)