Embed Size (px)
Citation preview
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 1/29
Noise Models and Filtering
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 2/29
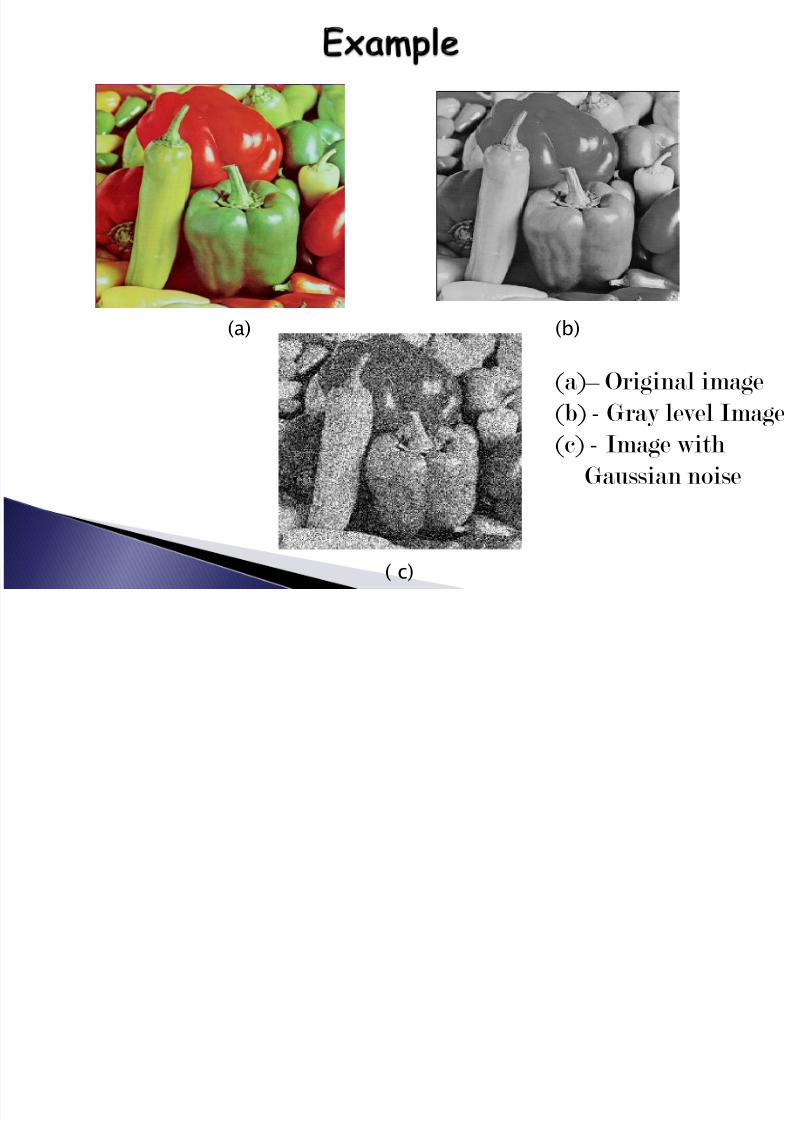
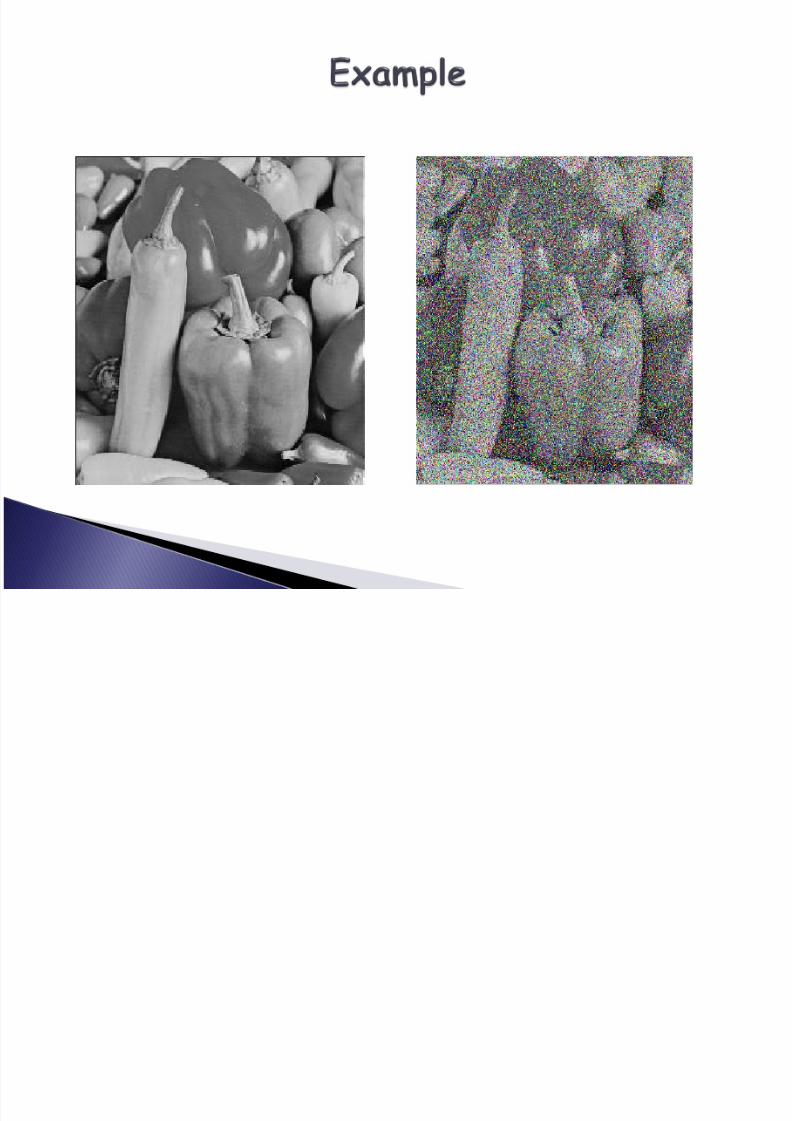
The sources of noise in digital images arise during
image acquisition (digitization) and transmission.
We can consider a noisy image to be modelled asfollows:
g (x,y)= f (x,y)+ ƞ (x,y)
where f(x, y) is the original image pixel, η (x, y) is the
noise term and g(x, y) is the resulting noisy pixel

8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 3/29
There are many different models for the image noise term
η (x, y) :• Gaussian
• Rayleigh• Erlang• Exponential• Uniform• Impulse
Salt and pepper noise
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 4/29
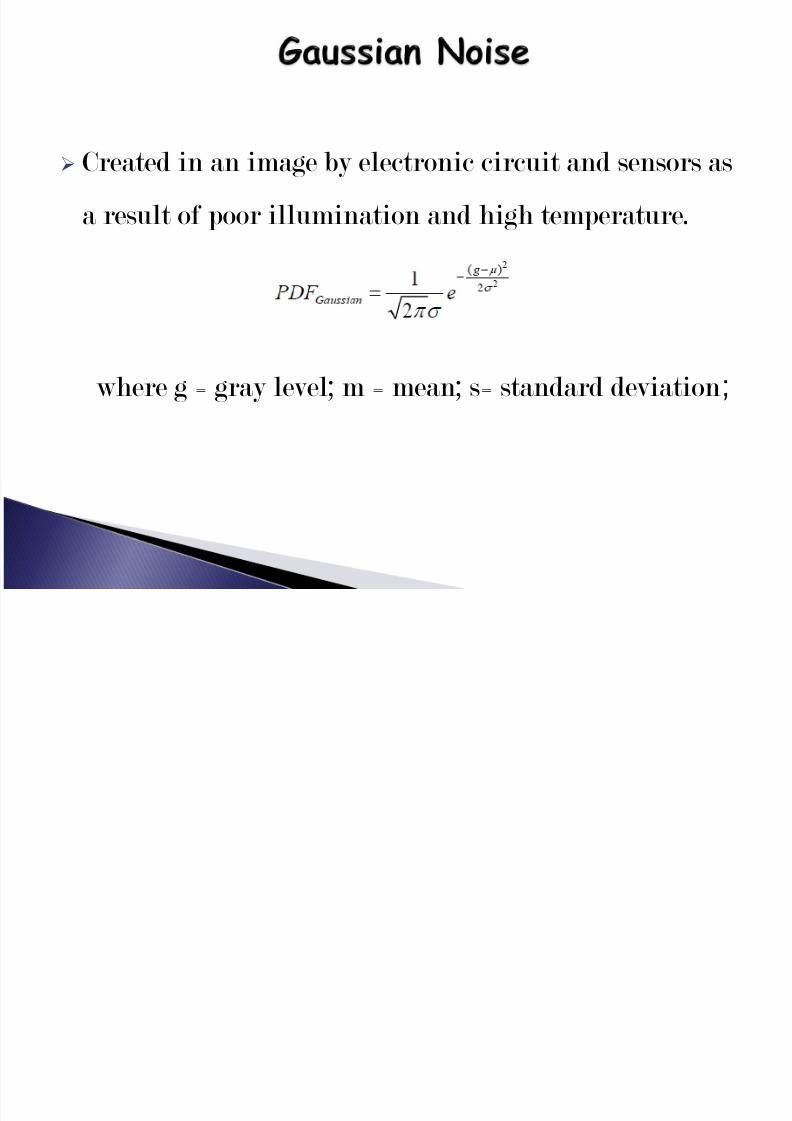
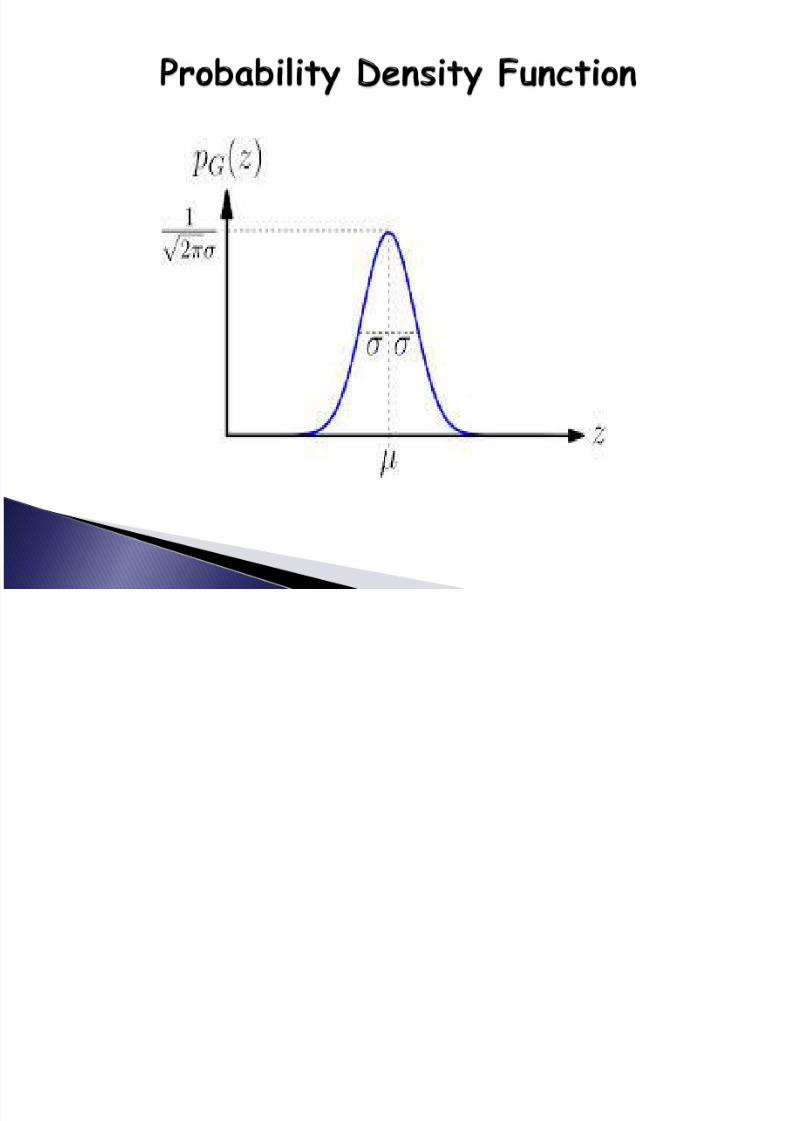
Created in an image by electronic circuit and sensors as
a result of poor illumination and high temperature.
where g = gray level; m = mean; s= standard deviation ;
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 5/29
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 6/29
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 7/29
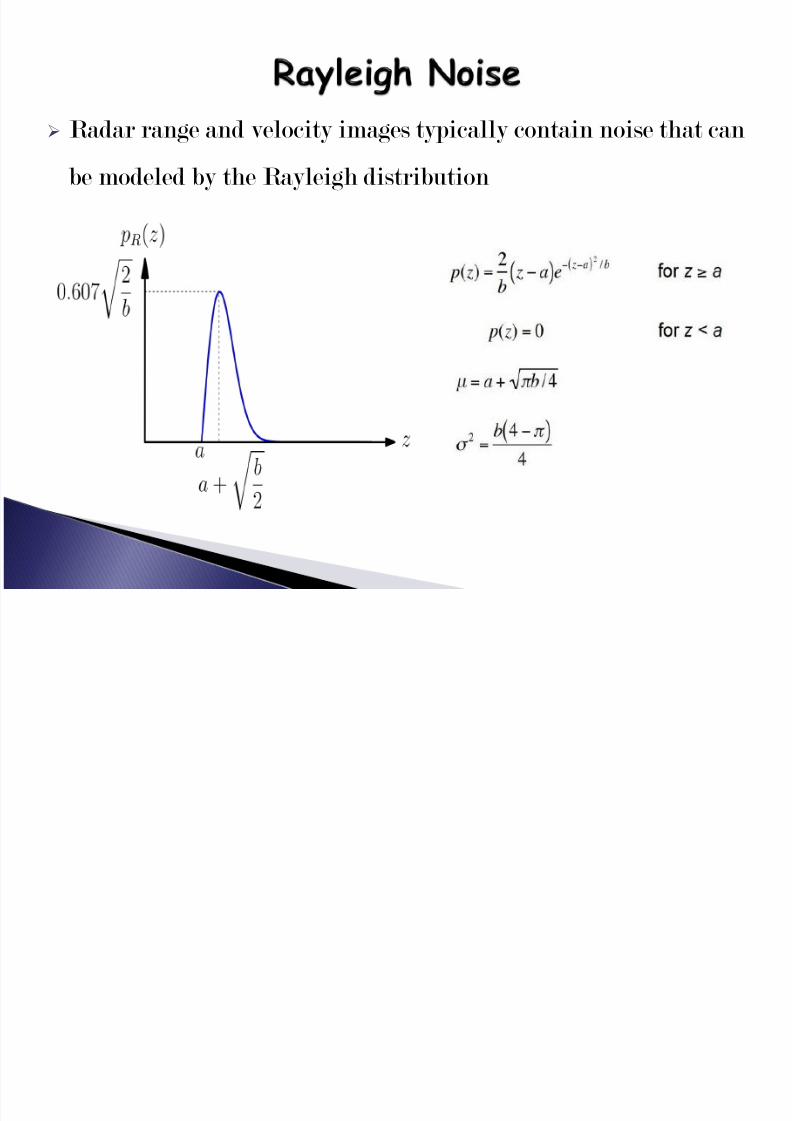
Radar range and velocity images typically contain noise that can be modeled by the Rayleigh distribution
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 8/29
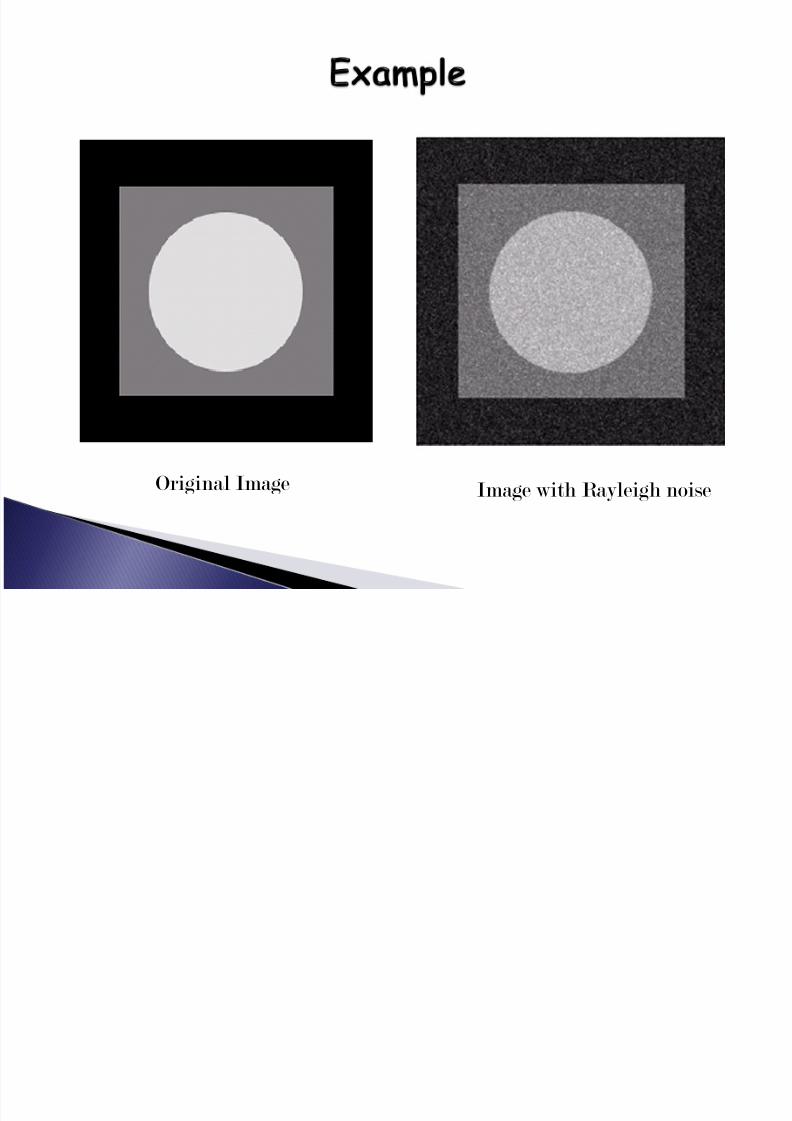
Original Image Image with Rayleigh noise
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 9/29
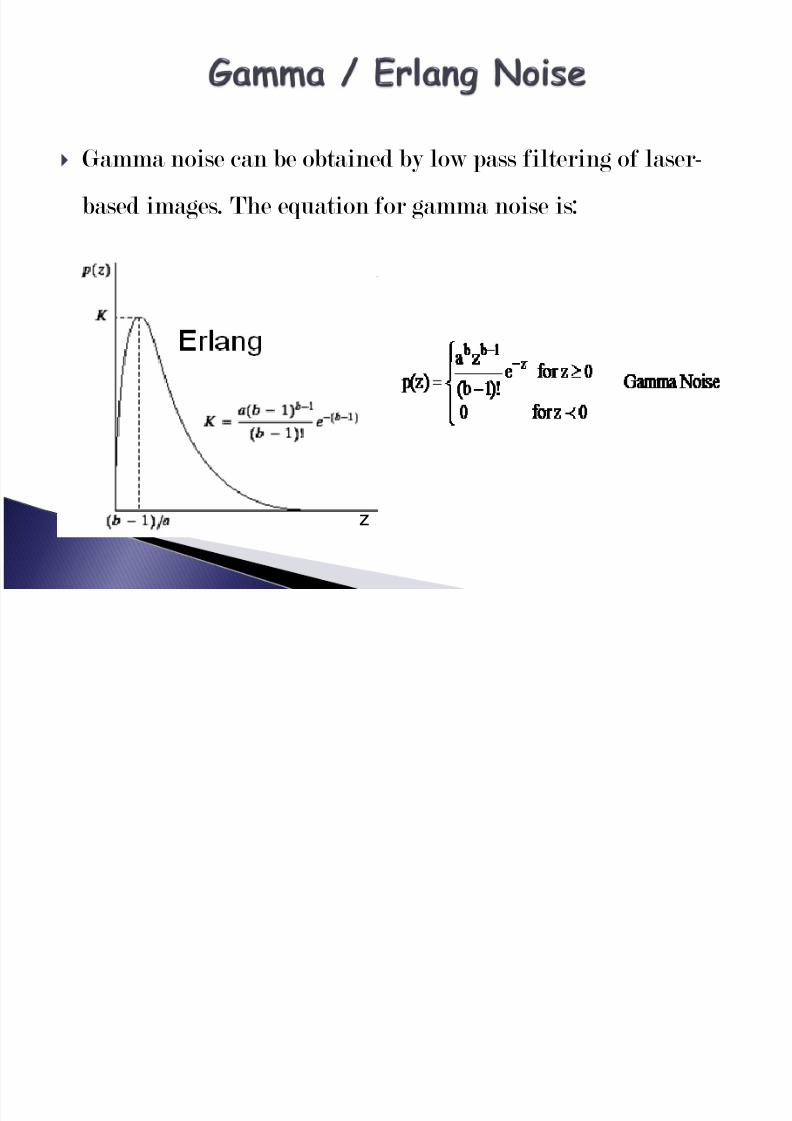
Gamma noise can be obtained by low pass filtering of laser-
based images. The equation for gamma noise is:
z
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 10/29
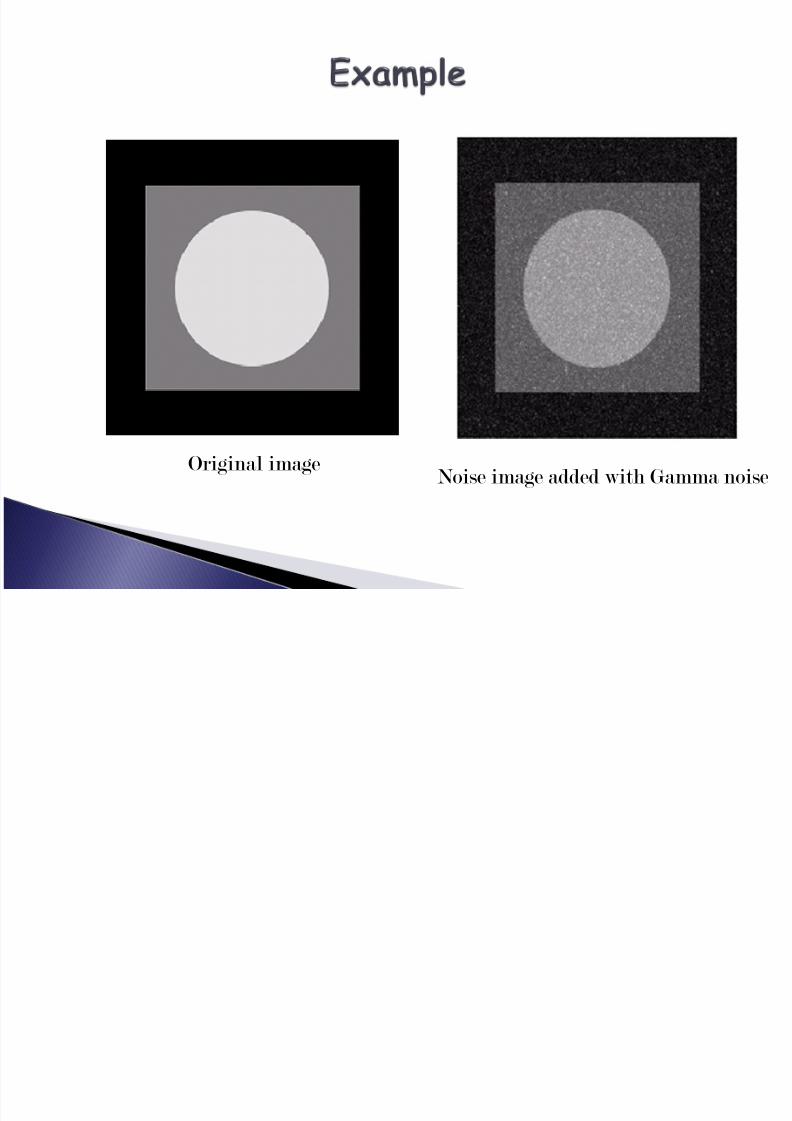
Original imageNoise image added with Gamma noise
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 11/29
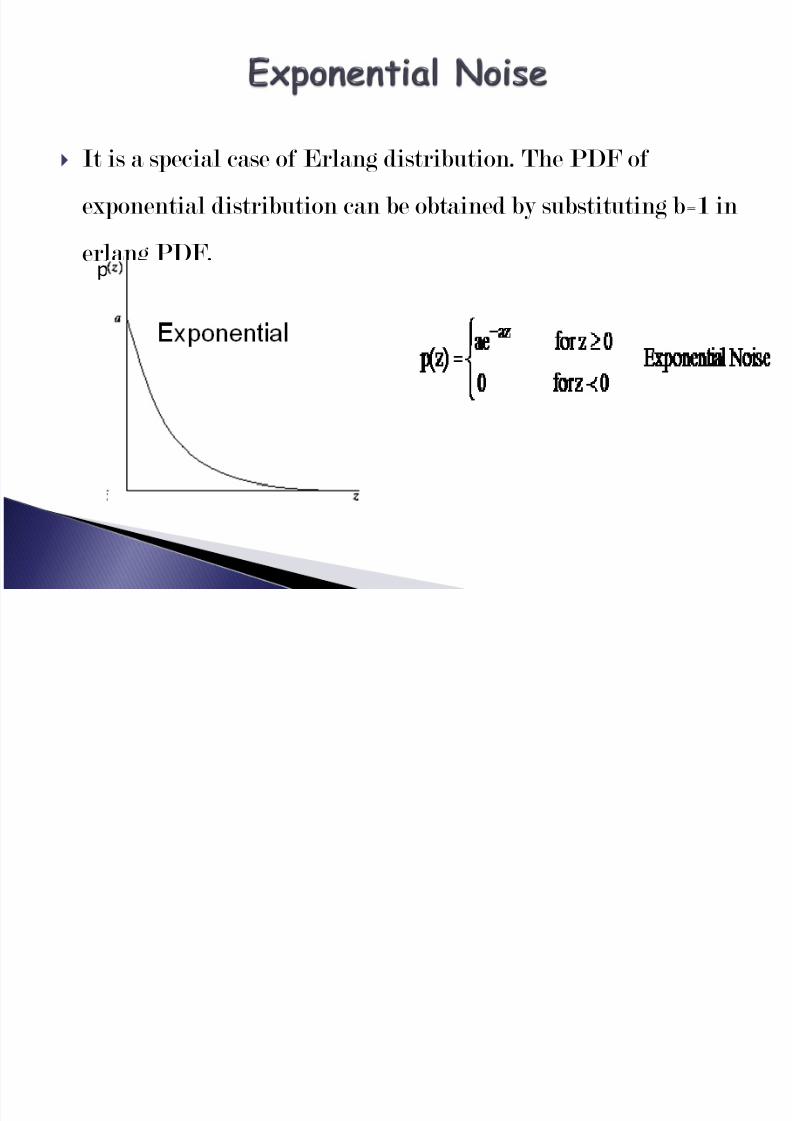
It is a special case of Erlang distribution. The PDF of
exponential distribution can be obtained by substituting b=1 in
erlang PDF.p
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 12/29
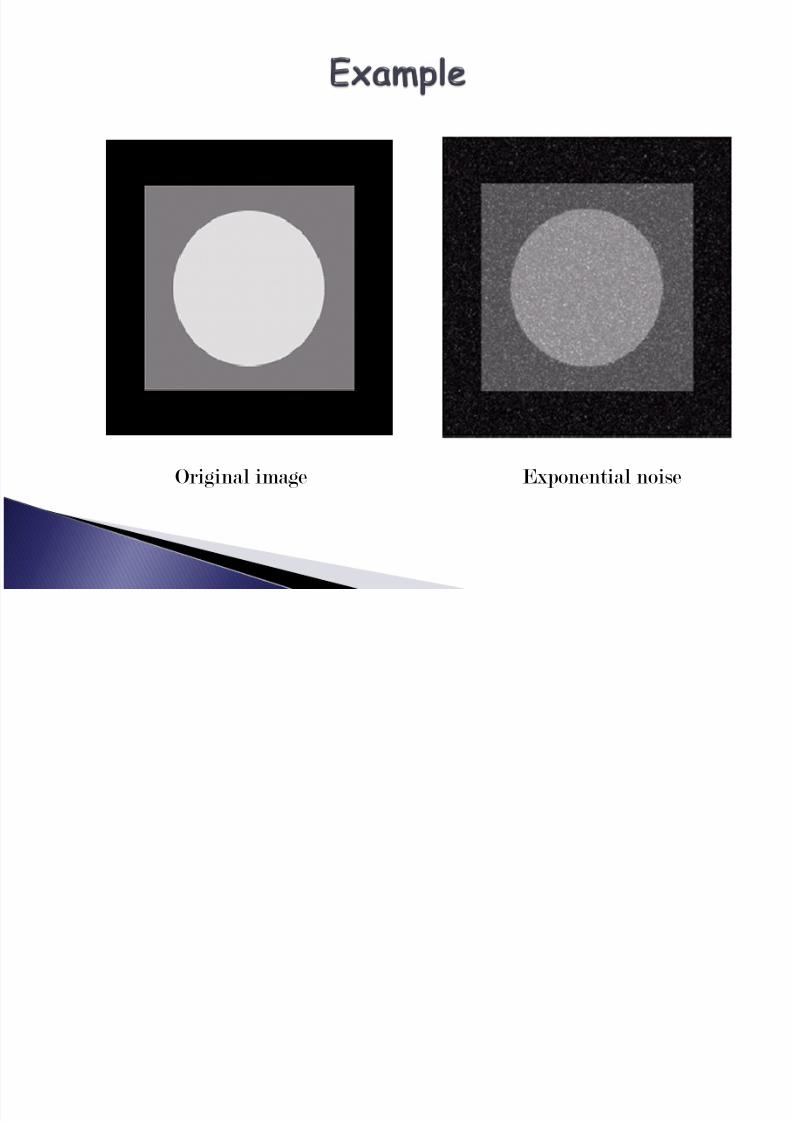
Original image Exponential noise
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 13/29
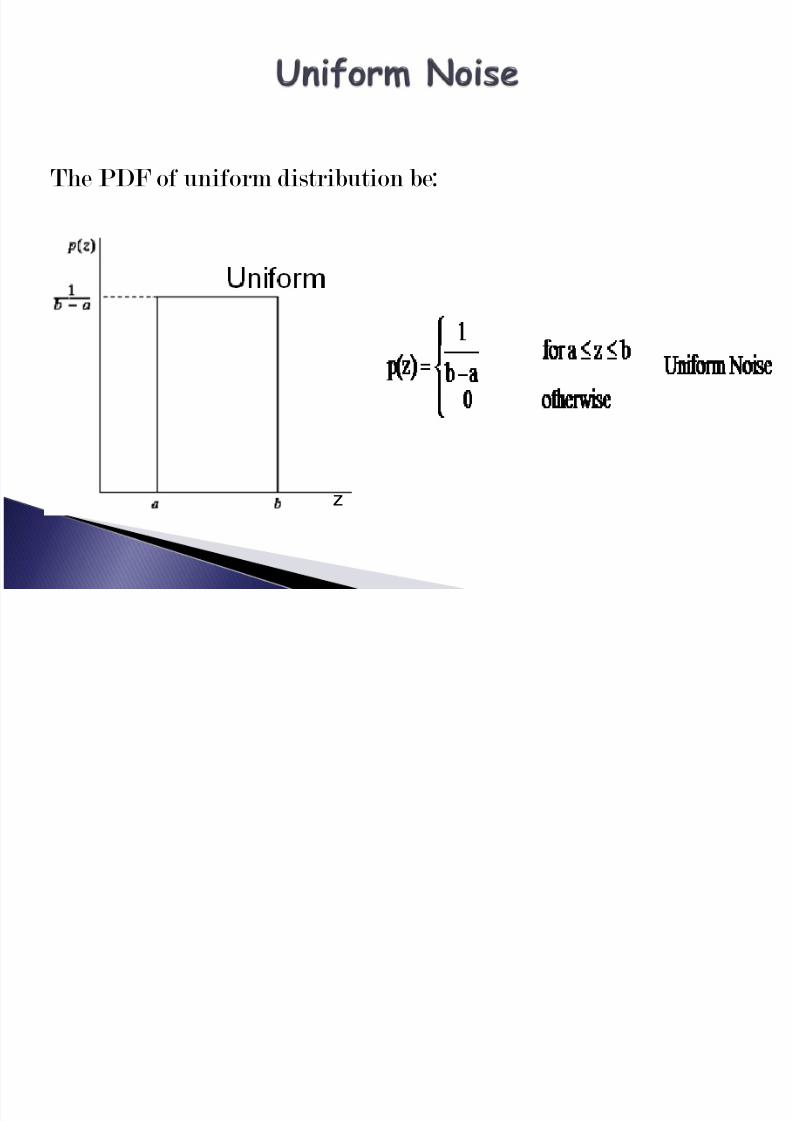
The PDF of uniform distribution be:
z
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 14/29
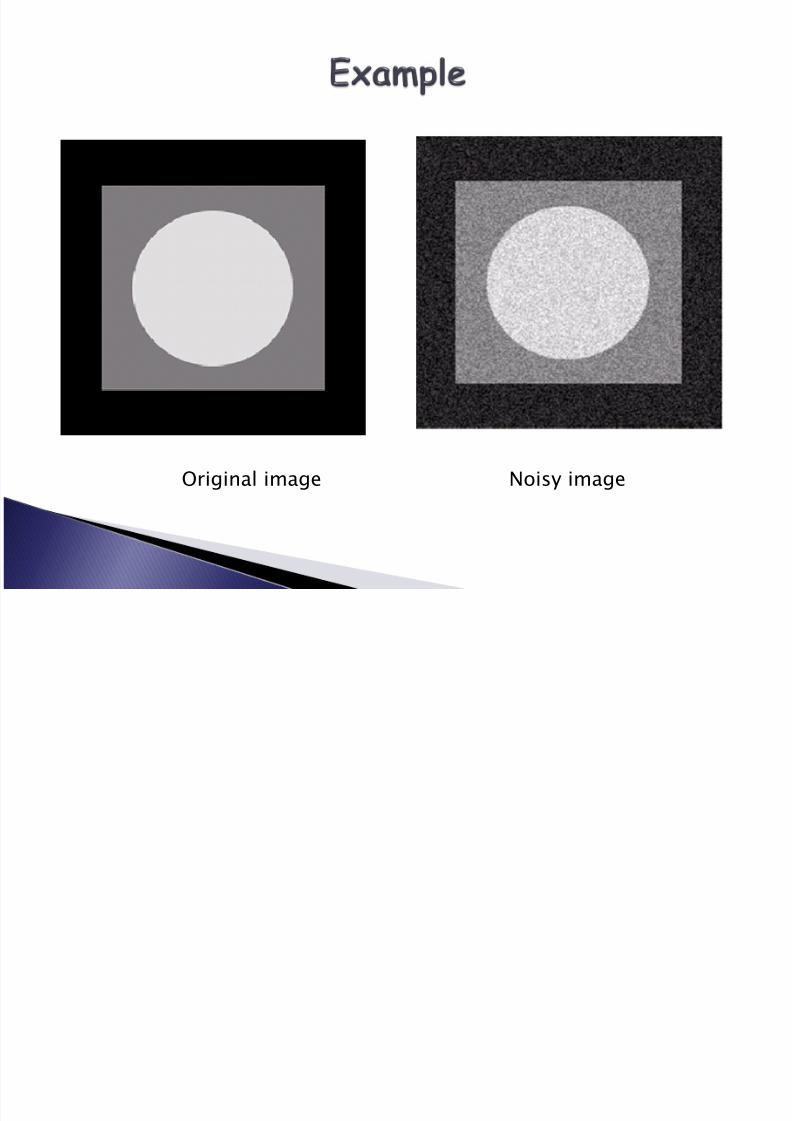
Original image Noisy image
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 15/29
The salt-and-pepper type noise (also called impulse noise, shot
noise or spike noise) is typically caused by malfunctioning
pixel elements in the camera sensors, faulty memory locations,
or timing errors in the digitization process.
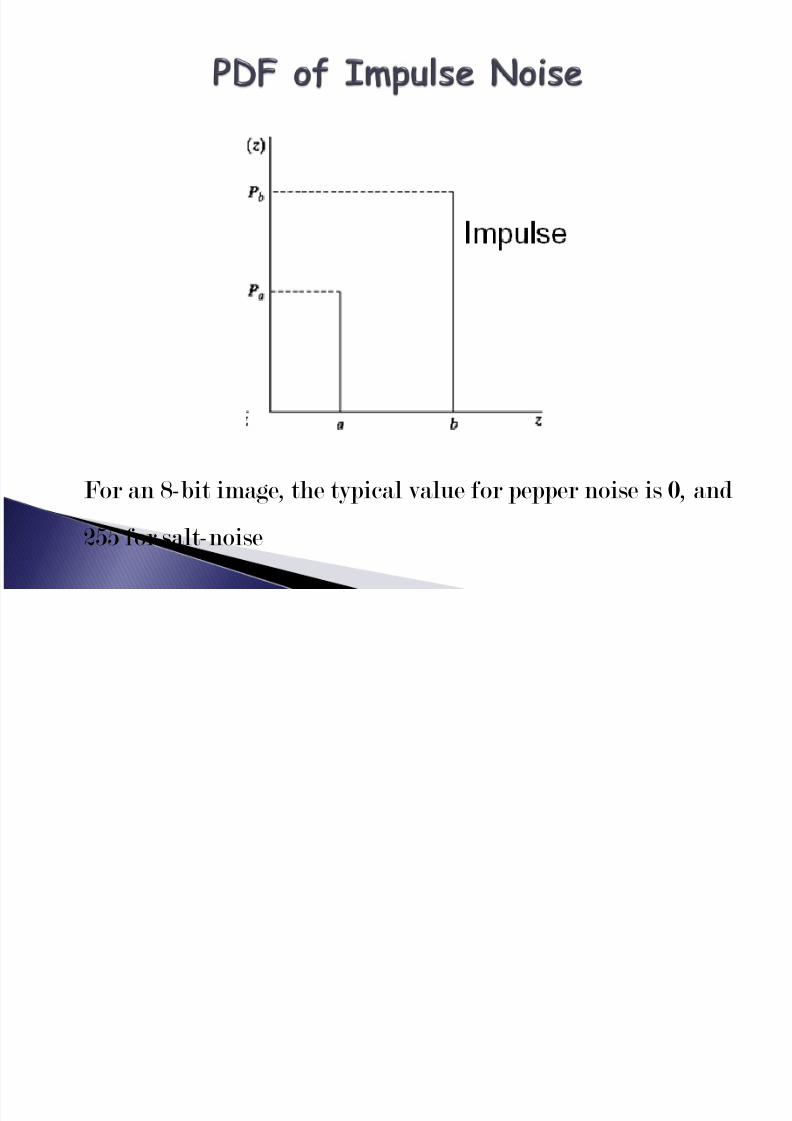
Salt and Pepper noise can be analytically described by:
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 16/29
For an 8-bit image, the typical value for pepper noise is 0, and
255 for salt-noise
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 17/29

8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 18/29

8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 19/29
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 20/29
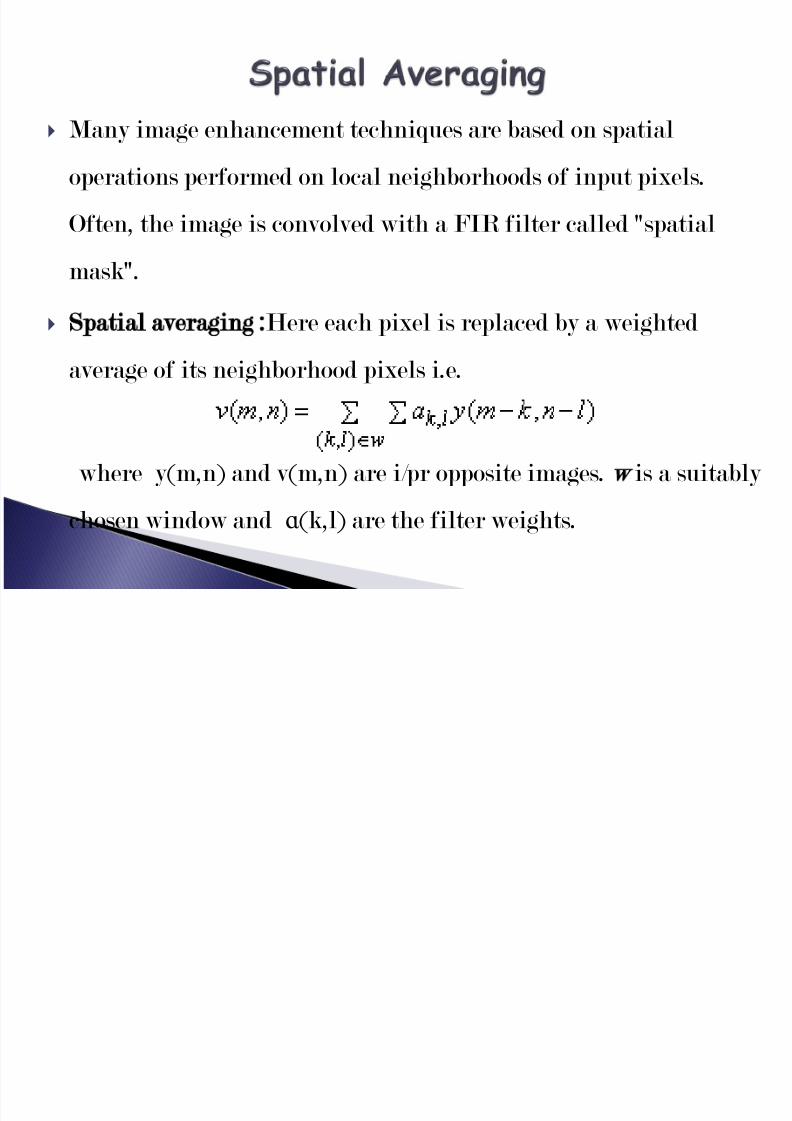
Many image enhancement techniques are based on spatialoperations performed on local neighborhoods of input pixels.
Often, the image is convolved with a FIR filter called "spatial
mask".Spatial averaging Here each pixel is replaced by a weighted
average of its neighborhood pixels i.e.
where y(m,n) and v(m,n) are i/pr opposite images. is a suitably
chosen window and ɑ (k,l) are the filter weights.
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 21/29

8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 22/29
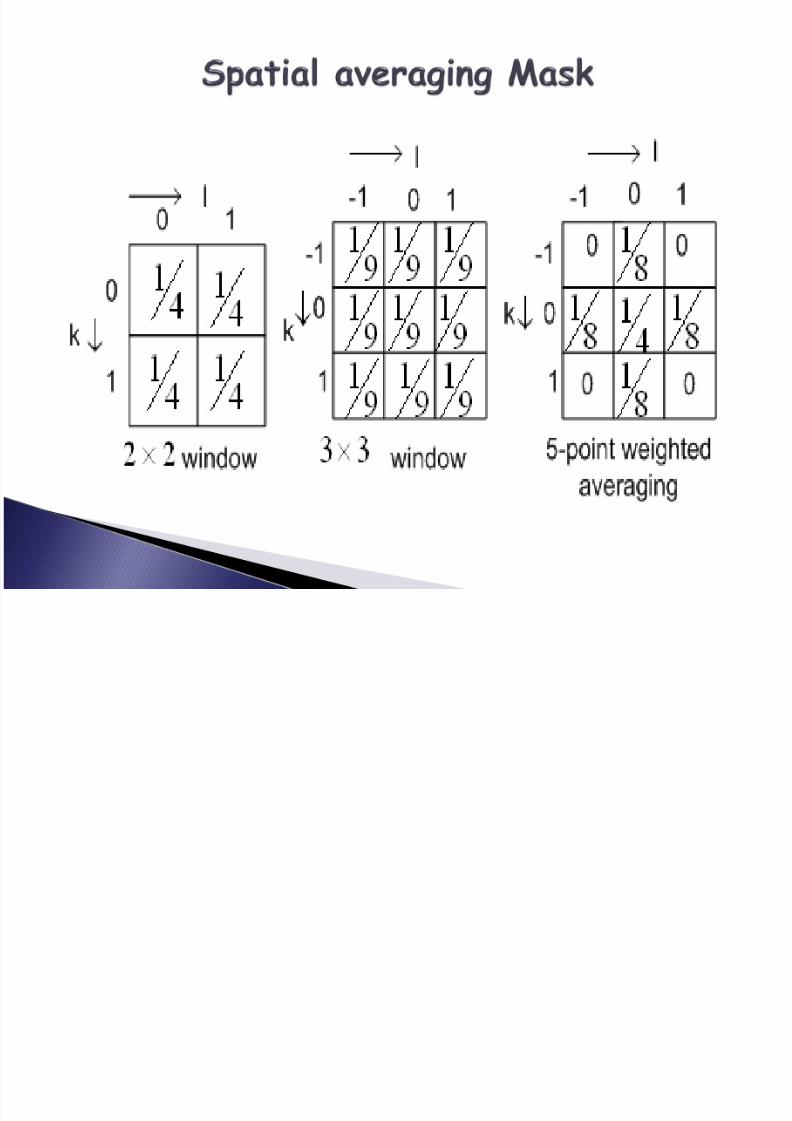
A common class of spatial averaging filters has all equal weights giving
where is the number of pixels in the window.Another spatial averaging filter used often is given by
ie. each pixel is replaced by its average with the average of its nearest four
pixels.
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 23/29
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 24/29
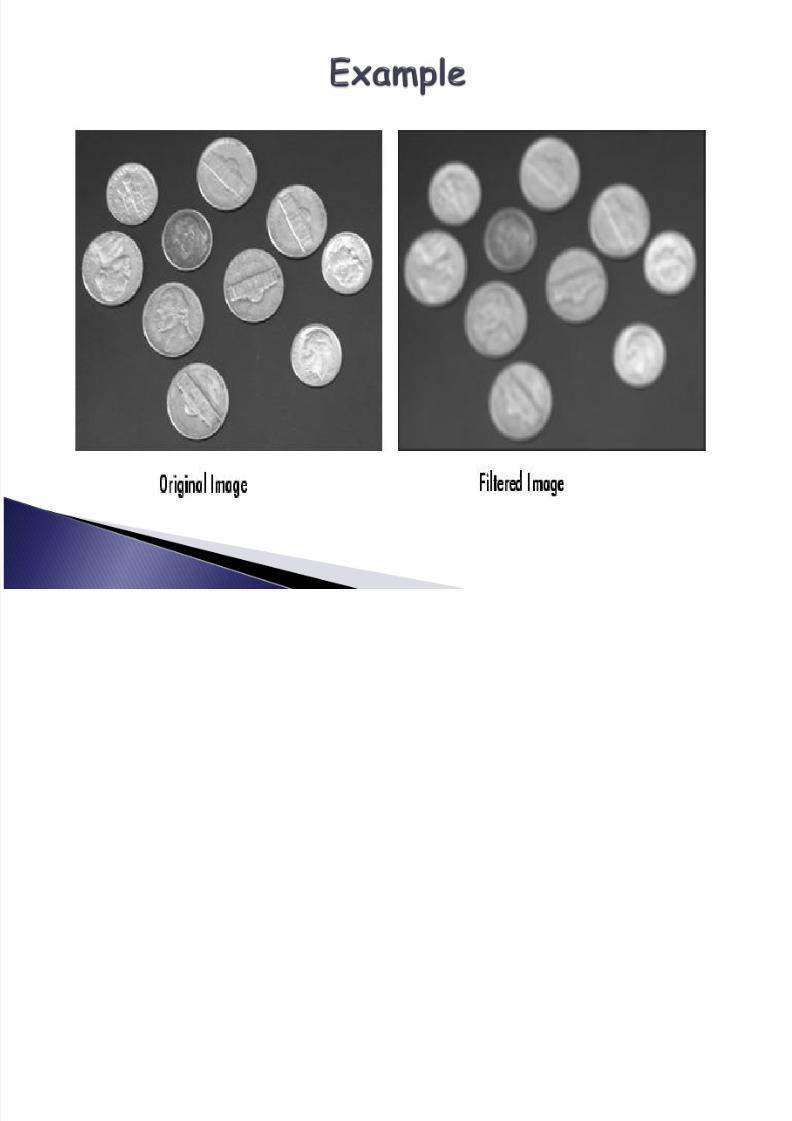
In practice, the pixels are not constant. Hence the window size
is limited. Due to this, the output image of spatial averaging is
distorted in the form of BLURRING.
To protect the edges from blurring while smoothing, a
DIRECTIONAL AVERAGING FILTER is needed. Such a
filtering process is called Directional Smoothing.
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 25/29
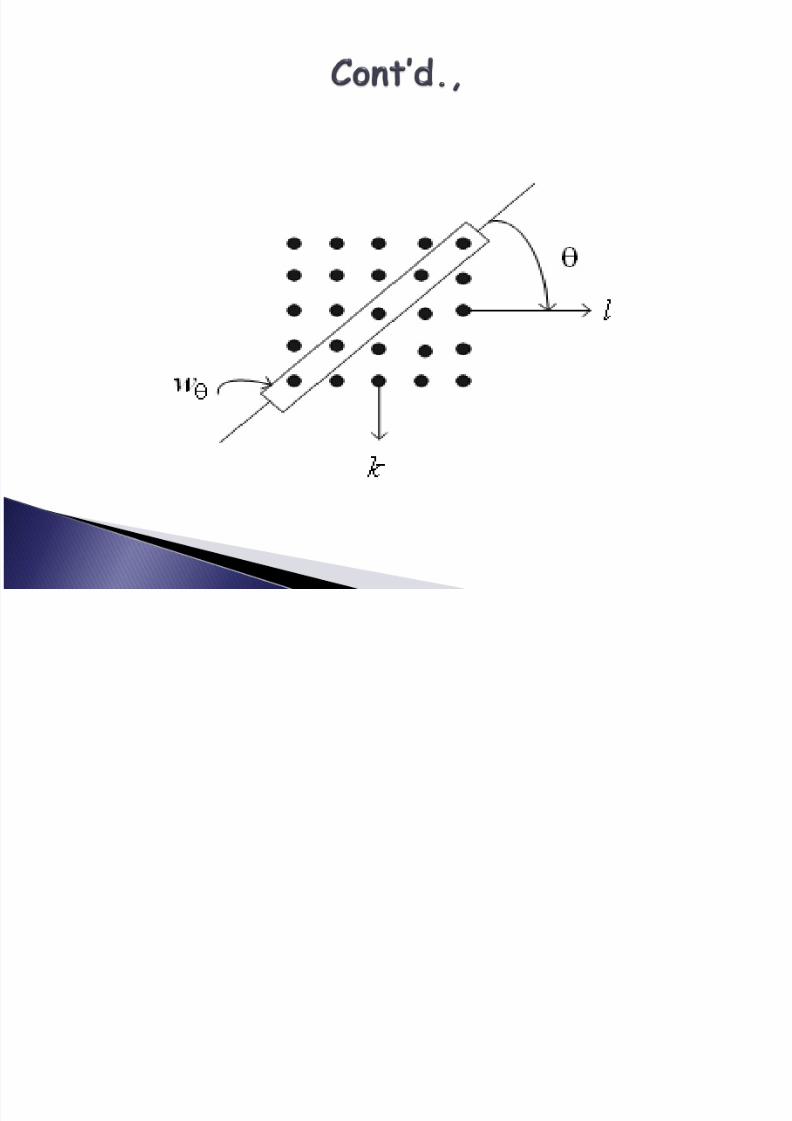
To protect edges from blurring while smoothing, a directional
averaging filter is used. Spatial average are calculated
in several directions as
And the direction is found such that |f(x,y)-v(m,n,θ )| is
minimum
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 26/29
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 27/29
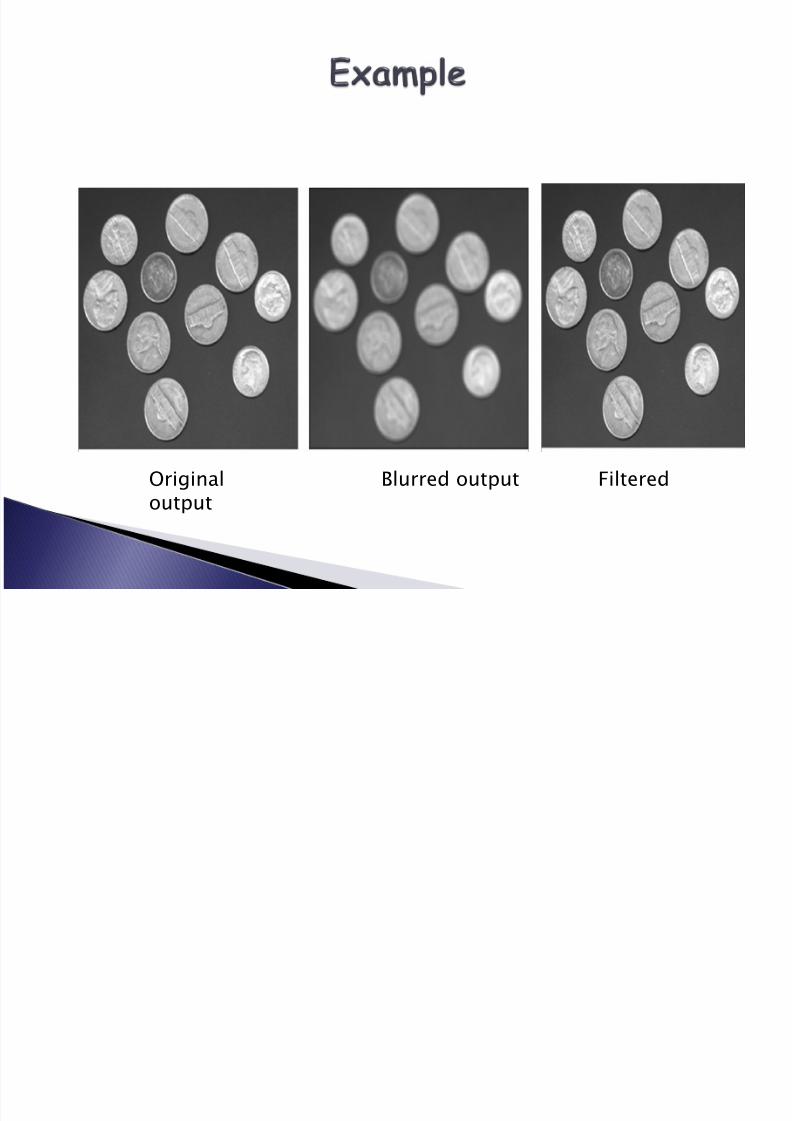
Original Blurred output Filteredoutput

8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 28/29
Recap
◦ Noise models
◦ Spatial Averaging
◦ Directional Smoothing
8/13/2019 Unit 2 ppt2
http://slidepdf.com/reader/full/unit-2-ppt2 29/29















![Ppt2 c9 [recuperado]](https://img.pdfslide.us/doc/110x75/555b9538d8b42acd238b5438/ppt2-c9-recuperado.jpg)