Embed Size (px)
Citation preview

DC motors
Unit 2: Modeling in the Frequency DomainPart 7: Modeling DC Motors
Engineering 5821:Control Systems I
Faculty of Engineering & Applied ScienceMemorial University of Newfoundland
January 22, 2010
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors
We consider here only one kind of electromechanical system—thearmature-controlled DC servomotor.
It consists of the followingcomponents:
Armature: Current-carrying wire wrapped around a rotatingmember called the rotor.
Fixed field: Permanent magnets (often augmented aselectromagnets) which create a fixed magnetic field that isperpendicular to the surface of the rotor.

DC motors
We consider here only one kind of electromechanical system—thearmature-controlled DC servomotor. It consists of the followingcomponents:
Armature: Current-carrying wire wrapped around a rotatingmember called the rotor.
Fixed field: Permanent magnets (often augmented aselectromagnets) which create a fixed magnetic field that isperpendicular to the surface of the rotor.

DC motors
We consider here only one kind of electromechanical system—thearmature-controlled DC servomotor. It consists of the followingcomponents:
Armature: Current-carrying wire wrapped around a rotatingmember called the rotor.
Fixed field: Permanent magnets (often augmented aselectromagnets) which create a fixed magnetic field that isperpendicular to the surface of the rotor.

DC motors
We consider here only one kind of electromechanical system—thearmature-controlled DC servomotor. It consists of the followingcomponents:
Armature: Current-carrying wire wrapped around a rotatingmember called the rotor.
Fixed field: Permanent magnets (often augmented aselectromagnets) which create a fixed magnetic field that isperpendicular to the surface of the rotor.

DC motors
We consider here only one kind of electromechanical system—thearmature-controlled DC servomotor. It consists of the followingcomponents:
Armature: Current-carrying wire wrapped around a rotatingmember called the rotor.
Fixed field: Permanent magnets (often augmented aselectromagnets) which create a fixed magnetic field that isperpendicular to the surface of the rotor.

DC motors
We consider here only one kind of electromechanical system—thearmature-controlled DC servomotor. It consists of the followingcomponents:
Armature: Current-carrying wire wrapped around a rotatingmember called the rotor.
Fixed field: Permanent magnets (often augmented aselectromagnets) which create a fixed magnetic field that isperpendicular to the surface of the rotor.

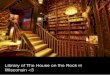
The job of the commutator is to reverse the direction of current sothat the conductor experiences the same force while the rotorrotates.
The magnetic field imposes a total force on the armature circuit ofF = 2Blia where B is the magnetic field strength, 2l is the totallength of the conductor that is perpendicular to the field, and ia isthe current. Multiplying by the rotor’s radius r we obtain a torque,
Tm = rF = r2Blia = Kt ia
where Kt = 2BLr is the motor torque constant.

The job of the commutator is to reverse the direction of current sothat the conductor experiences the same force while the rotorrotates.
The magnetic field imposes a total force on the armature circuit ofF = 2Blia where B is the magnetic field strength, 2l is the totallength of the conductor that is perpendicular to the field, and ia isthe current.
Multiplying by the rotor’s radius r we obtain a torque,
Tm = rF = r2Blia = Kt ia
where Kt = 2BLr is the motor torque constant.

The job of the commutator is to reverse the direction of current sothat the conductor experiences the same force while the rotorrotates.
The magnetic field imposes a total force on the armature circuit ofF = 2Blia where B is the magnetic field strength, 2l is the totallength of the conductor that is perpendicular to the field, and ia isthe current. Multiplying by the rotor’s radius r we obtain a torque,
Tm = rF = r2Blia = Kt ia
where Kt = 2BLr is the motor torque constant.

The job of the commutator is to reverse the direction of current sothat the conductor experiences the same force while the rotorrotates.
The magnetic field imposes a total force on the armature circuit ofF = 2Blia where B is the magnetic field strength, 2l is the totallength of the conductor that is perpendicular to the field, and ia isthe current. Multiplying by the rotor’s radius r we obtain a torque,
Tm = rF =
r2Blia = Kt ia
where Kt = 2BLr is the motor torque constant.

The job of the commutator is to reverse the direction of current sothat the conductor experiences the same force while the rotorrotates.
The magnetic field imposes a total force on the armature circuit ofF = 2Blia where B is the magnetic field strength, 2l is the totallength of the conductor that is perpendicular to the field, and ia isthe current. Multiplying by the rotor’s radius r we obtain a torque,
Tm = rF = r2Blia
= Kt ia
where Kt = 2BLr is the motor torque constant.

The job of the commutator is to reverse the direction of current sothat the conductor experiences the same force while the rotorrotates.
The magnetic field imposes a total force on the armature circuit ofF = 2Blia where B is the magnetic field strength, 2l is the totallength of the conductor that is perpendicular to the field, and ia isthe current. Multiplying by the rotor’s radius r we obtain a torque,
Tm = rF = r2Blia = Kt ia
where Kt = 2BLr is the motor torque constant.

The job of the commutator is to reverse the direction of current sothat the conductor experiences the same force while the rotorrotates.
The magnetic field imposes a total force on the armature circuit ofF = 2Blia where B is the magnetic field strength, 2l is the totallength of the conductor that is perpendicular to the field, and ia isthe current. Multiplying by the rotor’s radius r we obtain a torque,
Tm = rF = r2Blia = Kt ia
where Kt = 2BLr is the motor torque constant.

DC motors Evaluating Motor Parameters
So, the current ia generates a torque.
However, any conductortravelling through a magnetic field will induce a voltage on theconductor. This voltage induces a current that opposes ia. Thus, itis called the back electromotive force (emf). It is proportionalto the motor speed,
vb(t) = Kbdθm(t)
dt
where the constant Kb = Kt in a consistent set of units. In thefrequency domain these two fundamental effects are expressed asfollows:
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
So, the current ia generates a torque. However, any conductortravelling through a magnetic field will induce a voltage on theconductor.
This voltage induces a current that opposes ia. Thus, itis called the back electromotive force (emf). It is proportionalto the motor speed,
vb(t) = Kbdθm(t)
dt
where the constant Kb = Kt in a consistent set of units. In thefrequency domain these two fundamental effects are expressed asfollows:
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
So, the current ia generates a torque. However, any conductortravelling through a magnetic field will induce a voltage on theconductor. This voltage induces a current that opposes ia.
Thus, itis called the back electromotive force (emf). It is proportionalto the motor speed,
vb(t) = Kbdθm(t)
dt
where the constant Kb = Kt in a consistent set of units. In thefrequency domain these two fundamental effects are expressed asfollows:
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
So, the current ia generates a torque. However, any conductortravelling through a magnetic field will induce a voltage on theconductor. This voltage induces a current that opposes ia. Thus, itis called the back electromotive force (emf).
It is proportionalto the motor speed,
vb(t) = Kbdθm(t)
dt
where the constant Kb = Kt in a consistent set of units. In thefrequency domain these two fundamental effects are expressed asfollows:
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
So, the current ia generates a torque. However, any conductortravelling through a magnetic field will induce a voltage on theconductor. This voltage induces a current that opposes ia. Thus, itis called the back electromotive force (emf). It is proportionalto the motor speed,
vb(t) = Kbdθm(t)
dt
where the constant Kb = Kt in a consistent set of units. In thefrequency domain these two fundamental effects are expressed asfollows:
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
So, the current ia generates a torque. However, any conductortravelling through a magnetic field will induce a voltage on theconductor. This voltage induces a current that opposes ia. Thus, itis called the back electromotive force (emf). It is proportionalto the motor speed,
vb(t) = Kbdθm(t)
dt
where the constant Kb = Kt in a consistent set of units. In thefrequency domain these two fundamental effects are expressed asfollows:
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
So, the current ia generates a torque. However, any conductortravelling through a magnetic field will induce a voltage on theconductor. This voltage induces a current that opposes ia. Thus, itis called the back electromotive force (emf). It is proportionalto the motor speed,
vb(t) = Kbdθm(t)
dt
where the constant Kb = Kt in a consistent set of units.
In thefrequency domain these two fundamental effects are expressed asfollows:
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
So, the current ia generates a torque. However, any conductortravelling through a magnetic field will induce a voltage on theconductor. This voltage induces a current that opposes ia. Thus, itis called the back electromotive force (emf). It is proportionalto the motor speed,
vb(t) = Kbdθm(t)
dt
where the constant Kb = Kt in a consistent set of units. In thefrequency domain these two fundamental effects are expressed asfollows:
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
So, the current ia generates a torque. However, any conductortravelling through a magnetic field will induce a voltage on theconductor. This voltage induces a current that opposes ia. Thus, itis called the back electromotive force (emf). It is proportionalto the motor speed,
vb(t) = Kbdθm(t)
dt
where the constant Kb = Kt in a consistent set of units. In thefrequency domain these two fundamental effects are expressed asfollows:
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
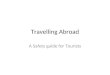
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
The following is the schematic for an armature-controlled DCmotor:
Applying KVL we obtain,
RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
The following is the schematic for an armature-controlled DCmotor:
Applying KVL we obtain,
RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
The following is the schematic for an armature-controlled DCmotor:
Applying KVL we obtain,
RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
Tm(s) = Kt Ia(s) Vb(s) = Kbsθm(s)
The following is the schematic for an armature-controlled DCmotor:
Applying KVL we obtain,
RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
Our goal is to relate the input volage Ea with the motor positionθm. We begin by using Tm(s) = Kt Ia(s) to get rid of Ia in thisequation,
(Ra + Las)Tm(s)
Kt+ Vb(s) = Ea(s)
We now utilize Vb(s) = Kbsθm(s),
(Ra + Las)Tm(s)
Kt+ Kbsθm(s) = Ea(s) (1)
We now switch to analyzing the mechanical system so that we canfind an expression relating Tm(s) with θm(s). Assuming we have asingle shaft with inertia and damping:
Tm(s) = (Jms2 + Dms)θm(s)

RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
Our goal is to relate the input volage Ea with the motor positionθm.
We begin by using Tm(s) = Kt Ia(s) to get rid of Ia in thisequation,
(Ra + Las)Tm(s)
Kt+ Vb(s) = Ea(s)
We now utilize Vb(s) = Kbsθm(s),
(Ra + Las)Tm(s)
Kt+ Kbsθm(s) = Ea(s) (1)
We now switch to analyzing the mechanical system so that we canfind an expression relating Tm(s) with θm(s). Assuming we have asingle shaft with inertia and damping:
Tm(s) = (Jms2 + Dms)θm(s)

RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
Our goal is to relate the input volage Ea with the motor positionθm. We begin by using Tm(s) = Kt Ia(s) to get rid of Ia in thisequation,
(Ra + Las)Tm(s)
Kt+ Vb(s) = Ea(s)
We now utilize Vb(s) = Kbsθm(s),
(Ra + Las)Tm(s)
Kt+ Kbsθm(s) = Ea(s) (1)
We now switch to analyzing the mechanical system so that we canfind an expression relating Tm(s) with θm(s). Assuming we have asingle shaft with inertia and damping:
Tm(s) = (Jms2 + Dms)θm(s)

RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
Our goal is to relate the input volage Ea with the motor positionθm. We begin by using Tm(s) = Kt Ia(s) to get rid of Ia in thisequation,
(Ra + Las)Tm(s)
Kt+ Vb(s) = Ea(s)
We now utilize Vb(s) = Kbsθm(s),
(Ra + Las)Tm(s)
Kt+ Kbsθm(s) = Ea(s) (1)
We now switch to analyzing the mechanical system so that we canfind an expression relating Tm(s) with θm(s). Assuming we have asingle shaft with inertia and damping:
Tm(s) = (Jms2 + Dms)θm(s)

RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
Our goal is to relate the input volage Ea with the motor positionθm. We begin by using Tm(s) = Kt Ia(s) to get rid of Ia in thisequation,
(Ra + Las)Tm(s)
Kt+ Vb(s) = Ea(s)
We now utilize Vb(s) = Kbsθm(s),
(Ra + Las)Tm(s)
Kt+ Kbsθm(s) = Ea(s) (1)
We now switch to analyzing the mechanical system so that we canfind an expression relating Tm(s) with θm(s). Assuming we have asingle shaft with inertia and damping:
Tm(s) = (Jms2 + Dms)θm(s)

RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
Our goal is to relate the input volage Ea with the motor positionθm. We begin by using Tm(s) = Kt Ia(s) to get rid of Ia in thisequation,
(Ra + Las)Tm(s)
Kt+ Vb(s) = Ea(s)
We now utilize Vb(s) = Kbsθm(s),
(Ra + Las)Tm(s)
Kt+ Kbsθm(s) = Ea(s) (1)
We now switch to analyzing the mechanical system so that we canfind an expression relating Tm(s) with θm(s). Assuming we have asingle shaft with inertia and damping:
Tm(s) = (Jms2 + Dms)θm(s)

RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
Our goal is to relate the input volage Ea with the motor positionθm. We begin by using Tm(s) = Kt Ia(s) to get rid of Ia in thisequation,
(Ra + Las)Tm(s)
Kt+ Vb(s) = Ea(s)
We now utilize Vb(s) = Kbsθm(s),
(Ra + Las)Tm(s)
Kt+ Kbsθm(s) = Ea(s) (1)
We now switch to analyzing the mechanical system so that we canfind an expression relating Tm(s) with θm(s).
Assuming we have asingle shaft with inertia and damping:
Tm(s) = (Jms2 + Dms)θm(s)

RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
Our goal is to relate the input volage Ea with the motor positionθm. We begin by using Tm(s) = Kt Ia(s) to get rid of Ia in thisequation,
(Ra + Las)Tm(s)
Kt+ Vb(s) = Ea(s)
We now utilize Vb(s) = Kbsθm(s),
(Ra + Las)Tm(s)
Kt+ Kbsθm(s) = Ea(s) (1)
We now switch to analyzing the mechanical system so that we canfind an expression relating Tm(s) with θm(s). Assuming we have asingle shaft with inertia and damping:
Tm(s) = (Jms2 + Dms)θm(s)

RaIa(s) + LasIa(s) + Vb(s) = Ea(s)
Our goal is to relate the input volage Ea with the motor positionθm. We begin by using Tm(s) = Kt Ia(s) to get rid of Ia in thisequation,
(Ra + Las)Tm(s)
Kt+ Vb(s) = Ea(s)
We now utilize Vb(s) = Kbsθm(s),
(Ra + Las)Tm(s)
Kt+ Kbsθm(s) = Ea(s) (1)
We now switch to analyzing the mechanical system so that we canfind an expression relating Tm(s) with θm(s). Assuming we have asingle shaft with inertia and damping:
Tm(s) = (Jms2 + Dms)θm(s)

We substitute this mechanical eq’n into the eq’n from KVL:
(Ra + Las)(Jms2 + Dms)θm(s)
Kt+ Kbsθm(s) = Ea(s)
Simplifying,[Ra
Kt
(1 + s
La
Ra
)(Jms2 + Dms
)+ Kb
]θm(s) = Ea(s)
Assuming that Ra � La we can simplify further to obtain the finaltransfer function,
DC Motor Transfer Function
θm(s)
Ea(s)=
Kt/(RaJm)
s[s + 1
Jm
(Dm + KtKb
Ra
)]Although this looks complex, the form is relatively simple,
θm(s)
Ea(s)=
K
s (s + α)

We substitute this mechanical eq’n into the eq’n from KVL:
(Ra + Las)(Jms2 + Dms)θm(s)
Kt+ Kbsθm(s) = Ea(s)
Simplifying,[Ra
Kt
(1 + s
La
Ra
)(Jms2 + Dms
)+ Kb
]θm(s) = Ea(s)
Assuming that Ra � La we can simplify further to obtain the finaltransfer function,
DC Motor Transfer Function
θm(s)
Ea(s)=
Kt/(RaJm)
s[s + 1
Jm
(Dm + KtKb
Ra
)]Although this looks complex, the form is relatively simple,
θm(s)
Ea(s)=
K
s (s + α)

We substitute this mechanical eq’n into the eq’n from KVL:
(Ra + Las)(Jms2 + Dms)θm(s)
Kt+ Kbsθm(s) = Ea(s)
Simplifying,
[Ra
Kt
(1 + s
La
Ra
)(Jms2 + Dms
)+ Kb
]θm(s) = Ea(s)
Assuming that Ra � La we can simplify further to obtain the finaltransfer function,
DC Motor Transfer Function
θm(s)
Ea(s)=
Kt/(RaJm)
s[s + 1
Jm
(Dm + KtKb
Ra
)]Although this looks complex, the form is relatively simple,
θm(s)
Ea(s)=
K
s (s + α)

We substitute this mechanical eq’n into the eq’n from KVL:
(Ra + Las)(Jms2 + Dms)θm(s)
Kt+ Kbsθm(s) = Ea(s)
Simplifying,[Ra
Kt
(1 + s
La
Ra
)(Jms2 + Dms
)+ Kb
]θm(s) = Ea(s)
Assuming that Ra � La we can simplify further to obtain the finaltransfer function,
DC Motor Transfer Function
θm(s)
Ea(s)=
Kt/(RaJm)
s[s + 1
Jm
(Dm + KtKb
Ra
)]Although this looks complex, the form is relatively simple,
θm(s)
Ea(s)=
K
s (s + α)

We substitute this mechanical eq’n into the eq’n from KVL:
(Ra + Las)(Jms2 + Dms)θm(s)
Kt+ Kbsθm(s) = Ea(s)
Simplifying,[Ra
Kt
(1 + s
La
Ra
)(Jms2 + Dms
)+ Kb
]θm(s) = Ea(s)
Assuming that Ra � La we can simplify further to obtain the finaltransfer function,
DC Motor Transfer Function
θm(s)
Ea(s)=
Kt/(RaJm)
s[s + 1
Jm
(Dm + KtKb
Ra
)]Although this looks complex, the form is relatively simple,
θm(s)
Ea(s)=
K
s (s + α)

We substitute this mechanical eq’n into the eq’n from KVL:
(Ra + Las)(Jms2 + Dms)θm(s)
Kt+ Kbsθm(s) = Ea(s)
Simplifying,[Ra
Kt
(1 + s
La
Ra
)(Jms2 + Dms
)+ Kb
]θm(s) = Ea(s)
Assuming that Ra � La we can simplify further to obtain the finaltransfer function,
DC Motor Transfer Function
θm(s)
Ea(s)=
Kt/(RaJm)
s[s + 1
Jm
(Dm + KtKb
Ra
)]
Although this looks complex, the form is relatively simple,
θm(s)
Ea(s)=
K
s (s + α)

We substitute this mechanical eq’n into the eq’n from KVL:
(Ra + Las)(Jms2 + Dms)θm(s)
Kt+ Kbsθm(s) = Ea(s)
Simplifying,[Ra
Kt
(1 + s
La
Ra
)(Jms2 + Dms
)+ Kb
]θm(s) = Ea(s)
Assuming that Ra � La we can simplify further to obtain the finaltransfer function,
DC Motor Transfer Function
θm(s)
Ea(s)=
Kt/(RaJm)
s[s + 1
Jm
(Dm + KtKb
Ra
)]Although this looks complex, the form is relatively simple,
θm(s)
Ea(s)=
K
s (s + α)

We substitute this mechanical eq’n into the eq’n from KVL:
(Ra + Las)(Jms2 + Dms)θm(s)
Kt+ Kbsθm(s) = Ea(s)
Simplifying,[Ra
Kt
(1 + s
La
Ra
)(Jms2 + Dms
)+ Kb
]θm(s) = Ea(s)
Assuming that Ra � La we can simplify further to obtain the finaltransfer function,
DC Motor Transfer Function
θm(s)
Ea(s)=
Kt/(RaJm)
s[s + 1
Jm
(Dm + KtKb
Ra
)]Although this looks complex, the form is relatively simple,
θm(s)
Ea(s)=
K
s (s + α)

DC motors Evaluating Motor Parameters
Evaluating Motor Parameters
θm(s)
Ea(s)=
Kt/(RaJm)
s[s + 1
Jm
(Dm + KtKb
Ra
)]
If the mechanical parameters of the rotor and any connected loadsare known, then Jm and Dm can be obtained,
Jm = Ja + JL
(N1
N2
)2
Dm = Da + DL
(N1
N2
)2
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
Evaluating Motor Parameters
θm(s)
Ea(s)=
Kt/(RaJm)
s[s + 1
Jm
(Dm + KtKb
Ra
)]If the mechanical parameters of the rotor and any connected loadsare known, then Jm and Dm can be obtained,
Jm = Ja + JL
(N1
N2
)2
Dm = Da + DL
(N1
N2
)2
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
Evaluating Motor Parameters
θm(s)
Ea(s)=
Kt/(RaJm)
s[s + 1
Jm
(Dm + KtKb
Ra
)]If the mechanical parameters of the rotor and any connected loadsare known, then Jm and Dm can be obtained,
Jm = Ja + JL
(N1
N2
)2
Dm = Da + DL
(N1
N2
)2
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
A dynamometer test can then be applied to estimate theelectrical parameters.
This test relates torque and speed. Consideragain equation (1) only with La assumed negligible,
Ra
KtTm(s) + Kbsθm(s) = Ea(s)
Notice that the LT of motor speed ωm(t) is sθm(s). Therefore wecan drop back into the time domain,
Ra
KtTm(t) + Kbωm(t) = ea(t)
If we let the applied voltage be a constant then we have a linearrelationship between torque and speed:
Tm = −KbKt
Raωm +
Kt
Raea
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
A dynamometer test can then be applied to estimate theelectrical parameters. This test relates torque and speed.
Consideragain equation (1) only with La assumed negligible,
Ra
KtTm(s) + Kbsθm(s) = Ea(s)
Notice that the LT of motor speed ωm(t) is sθm(s). Therefore wecan drop back into the time domain,
Ra
KtTm(t) + Kbωm(t) = ea(t)
If we let the applied voltage be a constant then we have a linearrelationship between torque and speed:
Tm = −KbKt
Raωm +
Kt
Raea
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
A dynamometer test can then be applied to estimate theelectrical parameters. This test relates torque and speed. Consideragain equation (1) only with La assumed negligible,
Ra
KtTm(s) + Kbsθm(s) = Ea(s)
Notice that the LT of motor speed ωm(t) is sθm(s). Therefore wecan drop back into the time domain,
Ra
KtTm(t) + Kbωm(t) = ea(t)
If we let the applied voltage be a constant then we have a linearrelationship between torque and speed:
Tm = −KbKt
Raωm +
Kt
Raea
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
A dynamometer test can then be applied to estimate theelectrical parameters. This test relates torque and speed. Consideragain equation (1) only with La assumed negligible,
Ra
KtTm(s) + Kbsθm(s) = Ea(s)
Notice that the LT of motor speed ωm(t) is sθm(s). Therefore wecan drop back into the time domain,
Ra
KtTm(t) + Kbωm(t) = ea(t)
If we let the applied voltage be a constant then we have a linearrelationship between torque and speed:
Tm = −KbKt
Raωm +
Kt
Raea
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
A dynamometer test can then be applied to estimate theelectrical parameters. This test relates torque and speed. Consideragain equation (1) only with La assumed negligible,
Ra
KtTm(s) + Kbsθm(s) = Ea(s)
Notice that the LT of motor speed ωm(t) is sθm(s).
Therefore wecan drop back into the time domain,
Ra
KtTm(t) + Kbωm(t) = ea(t)
If we let the applied voltage be a constant then we have a linearrelationship between torque and speed:
Tm = −KbKt
Raωm +
Kt
Raea
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
A dynamometer test can then be applied to estimate theelectrical parameters. This test relates torque and speed. Consideragain equation (1) only with La assumed negligible,
Ra
KtTm(s) + Kbsθm(s) = Ea(s)
Notice that the LT of motor speed ωm(t) is sθm(s). Therefore wecan drop back into the time domain,
Ra
KtTm(t) + Kbωm(t) = ea(t)
If we let the applied voltage be a constant then we have a linearrelationship between torque and speed:
Tm = −KbKt
Raωm +
Kt
Raea
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
A dynamometer test can then be applied to estimate theelectrical parameters. This test relates torque and speed. Consideragain equation (1) only with La assumed negligible,
Ra
KtTm(s) + Kbsθm(s) = Ea(s)
Notice that the LT of motor speed ωm(t) is sθm(s). Therefore wecan drop back into the time domain,
Ra
KtTm(t) + Kbωm(t) = ea(t)
If we let the applied voltage be a constant then we have a linearrelationship between torque and speed:
Tm = −KbKt
Raωm +
Kt
Raea
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
A dynamometer test can then be applied to estimate theelectrical parameters. This test relates torque and speed. Consideragain equation (1) only with La assumed negligible,
Ra
KtTm(s) + Kbsθm(s) = Ea(s)
Notice that the LT of motor speed ωm(t) is sθm(s). Therefore wecan drop back into the time domain,
Ra
KtTm(t) + Kbωm(t) = ea(t)
If we let the applied voltage be a constant then we have a linearrelationship between torque and speed:
Tm = −KbKt
Raωm +
Kt
Raea
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
A dynamometer test can then be applied to estimate theelectrical parameters. This test relates torque and speed. Consideragain equation (1) only with La assumed negligible,
Ra
KtTm(s) + Kbsθm(s) = Ea(s)
Notice that the LT of motor speed ωm(t) is sθm(s). Therefore wecan drop back into the time domain,
Ra
KtTm(t) + Kbωm(t) = ea(t)
If we let the applied voltage be a constant then we have a linearrelationship between torque and speed:
Tm = −KbKt
Raωm +
Kt
Raea
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

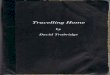
Tm = −KbKt
Raωm +
Kt
Raea
We find the constants by applying a physical test to obtain the xand y intercepts of this line.
Stall torque: Torque at which themotor is just unable to turn.
Tstall =Kt
Raea
No-load speed: Angular velocity at which motor runs without animposed load.
ωno-load =ea
Kb

Tm = −KbKt
Raωm +
Kt
Raea
We find the constants by applying a physical test to obtain the xand y intercepts of this line. Stall torque: Torque at which themotor is just unable to turn.
Tstall =Kt
Raea
No-load speed: Angular velocity at which motor runs without animposed load.
ωno-load =ea
Kb

Tm = −KbKt
Raωm +
Kt
Raea
We find the constants by applying a physical test to obtain the xand y intercepts of this line. Stall torque: Torque at which themotor is just unable to turn.
Tstall =Kt
Raea
No-load speed: Angular velocity at which motor runs without animposed load.
ωno-load =ea
Kb

Tm = −KbKt
Raωm +
Kt
Raea
We find the constants by applying a physical test to obtain the xand y intercepts of this line. Stall torque: Torque at which themotor is just unable to turn.
Tstall =Kt
Raea
No-load speed: Angular velocity at which motor runs without animposed load.
ωno-load =ea
Kb

Tm = −KbKt
Raωm +
Kt
Raea
We find the constants by applying a physical test to obtain the xand y intercepts of this line. Stall torque: Torque at which themotor is just unable to turn.
Tstall =Kt
Raea
No-load speed: Angular velocity at which motor runs without animposed load.
ωno-load =ea
Kb

DC motors Evaluating Motor Parameters
Tm = −KbKt
Raωm +
Kt
Raea
Using these measureable quantities (or by measuring other (ω,T )data points) we can solve for the parameters of this line andtherefore obtain the constants Kt/Ra and Kb.
ENGI 5821 Unit 2, Part 7: Modeling DC Motors

DC motors Evaluating Motor Parameters
Tm = −KbKt
Raωm +
Kt
Raea
Using these measureable quantities (or by measuring other (ω,T )data points) we can solve for the parameters of this line andtherefore obtain the constants Kt/Ra and Kb.
ENGI 5821 Unit 2, Part 7: Modeling DC Motors